
The Polynomial Least Squares Method for Nonlinear Fractional Volterra and Fredholm Integro-Differential Equations



1
Department of Mathematics, Politehnica University of Timişoara, 300006 Timişoara, Romania
2
Department of Mathematics, West University of Timişoara, 300223 Timişoara, Romania
*
Author to whom correspondence should be addressed.
†
Both authors contributed equally to this work.
Mathematics 2021, 9(18), 2324; https://0-doi-org.brum.beds.ac.uk/10.3390/math9182324
Submission received: 14 August 2021
/
Revised: 8 September 2021
/
Accepted: 16 September 2021
/
Published: 19 September 2021
(This article belongs to the Special Issue Recent Advances in Differential Equations and Applications)
Abstract
:We present a relatively new and very efficient method to find approximate analytical solutions for a very general class of nonlinear fractional Volterra and Fredholm integro-differential equations. The test problems included and the comparison with previous results by other methods clearly illustrate the simplicity and accuracy of the method.
1. Introduction
The two mathematicians Vito Volterra and Erik Ivar Fredholm, through their works published in the early 1900s, laid the foundations of the modern theory of integro-differential equations. As the fractional Volterra and Fredholm integro-differential equations have multiple applications in various fields such as engineering, physics, mechanics, etc., they have aroused the interest of many researchers.
In recent years there have been numerous papers in which, for equations of this type, approximate analytical solutions or numerical solutions by various methods are presented, and this is because obtaining an exact solution is often impossible.
Among the methods used to compute approximate analytical and numerical solutions for fractional Volterra and Fredholm integro-differential equations we mention:
- The Bernoulli Matrix Method, used by Bhrawya et al. in 2012 ([3]) to find solutions for fractional Fredholm integro-differential equations, by Keshavarz et al. in 2019 ([4]) to find solutions for a class of nonlinear mixed Fredholm–Volterra integro-differential equations of fractional order and by Rajagopal et al. in 2020 ([5]) to find solutions for fractional-order Volterra integro-differential equations,
- The Legendre Wavelets Method, employed by Meng et al. in 2014 ([6]) to solve Volterra–Fredholm integro-differential equations of fractional order,
- The Legendre Spectral Element Method, employed by Lotfi and Alipanah in 2020 (([7]) to solve Volterra–Fredholm integro-differential equations,
- The Shifted Jacobi-Spectral Collocation Method, used by Al-Safi in 2018 ([8]) to solve Volterra–Fredholm integro-differential equations of fractional order,
- The Reproducing Kernel Hilbert Space Method, used by Arkub et al. in 2013 ([9]) to solve Fredholm integro-differential equations,
- The Sinc-Collocation Method, used by Alkan and Hatipoglu in 2017 ([10]) to solve Volterra–Fredholm integro-differential equations of fractional order,
- The Legendre Collocation Method, employed by Rohaninasab et al. in 2017 ([11]) to solve high-order linear Volterra–Fredholm integro-differential equations,
- The Shifted Chebyshev Polynomials Method, also used by Farhood in 2015 ([13]) to find solutions for nonlinear fractional integro-differential equations,
- The Genocchi Polynomials Method, employed by Loh et al. in 2017 ([14]) to solve Volterra–Fredholm integro-differential equations of fractional order,
- The Euler Wavelets Method, used by Wang and Zhu in 2017 ([15]) to find approximate solutions for Fredholm–Volterra fractional integro-differential equations,
- The Lucas Wavelets Method, employed by Dehestani et al. in 2021 ([16]) to compute approximate solutions for Fredholm–Volterra fractional integro-differential equations,
- The Moving Least Square Method, presented by Dheghan and Salehi in 2012 ([17]) to find numerical solutions for nonlinear integro-differential equations,
- The Rationalized Haar Functions Method, presented by Ordokhani and Rahimi in 2014 ([23]) to find solutions for fractional Volterra integro-differential equations,
- The Newton–Kantorovitch Method, presented by Susahab and Jahanshahi in 2015 ([24]) to find approximate numerical solutions to nonlinear fractional Volterra and Fredholm integro-differential equations,
- The Müntz–Legendre Polynomials Method used by Sabermahani and Ordokhani in 2020 ([27] to solve fractional Fredholm–Volterra integro-differential equations,
- The Petrov–Galerkin Method, also used by Sabermahani and Ordokhani in 2020 ([27],
- The Lagrange Polynomials Method used by Salman and Mustafa in 2020 ([28]) to find solutions for fractional Fredholm–Volterra integro-differential equations.
The class of equations studied in this paper is:
which, depending on the problem, may have attached a set of conditions of the type:
Here, for , denotes the Caputo fractional derivative of order , namely:
The kernel functions and the function are assumed to have suitable derivatives on the closed interval such that the problem consisting of the Equation (1) together with initial conditions (2) (if present) admits a solution.
This class of equations is evidently a very general one since it includes both Fredholm and Volterra-type equations, linear and nonlinear, and also both integro-differential and integral equations.
Unfortunately the exact solution of a nonlinear integro-differential equation of the type (1) cannot be found, with the exception of a relatively small number of simple cases (such as the test problems as examples). Thus, numerical solutions or (preferably) approximate analytical solutions must be computed.
The rest of the paper is structured as follows: in Section 2, we present the Polynomial Least Squares Method (denoted from this point forward as PLSM), in Section 3 we present the results of an extensive testing process involving most of the usual test problems included in similar studies, and in Section 4 we present the conclusions of the study.
2. The Method
In the following, we will denote the problems (1) + (2) and the Equation (1) together with the conditions (2).
If is an approximate solution of the Equation (1), the error obtained by replacing the exact solution x with the approximation is given by the remainder
We will find approximate polynomial solutions of the problems (1) + (2) on the closed interval , solutions which satisfy the following conditions:
Definition 1.
Definition 2.
Definition 3.
We consider the sequence of polynomials , , , satisfying the conditions:
The following convergence theorem holds:
Theorem 1.
Proof.
We will find a weak -polynomial solution of the type:
where the constants are calculated using the steps outlined in the following.
- If initial conditions are included, we compute as the values which give the minimum of the functional (9) and again as functions of by using the initial conditions. If initial conditions are not included then are the values which give the minimum of the functional.
- Using the constants determined in the previous step, we consider the polynomial:
Based on the way the coefficients of polynomial are computed and taking into account the relations (8)–(12), the following inequality holds:
It follows that
We obtain
From this limit we obtain that satisfying the following property:
Remark 1.
3. Numerical Examples
3.1. Application 1: Fredholm Nonlinear Fractional Integro-Differential Equation
The first application is the problem consisting of the equation ([13,19]):
together with the initial condition ,
where .
The exact solution of this problem is .
We will follow the steps of the algorithm described in the proof from the previous section. First, by choosing a first order polynomial , from the initial condition, it follows that , so .
By solving the equation , we obtain three stationary (equilibrium) points and it is easy to show that the minimum of the functional corresponds, as expected, to the value .
3.2. Application 2: Fredholm Nonlinear Fractional Integro-Differential Equation
The exact solution of of the problem consisting of Equation (14) and the initial condition is .
Again, using the PLSM steps outlined in the previous section, we choose , obtain from the initial condition and compute the corresponding remainder
3.3. Application 3: Fredholm Nonlinear Fractional Integro-Differential Equation
The exact solution of the problem (15) is known only for , namely .
Using PLSM in the case , we choose the approximate solution and we obtain and the functional . Obviously we obtain in a very straightforward manner the exact solution .
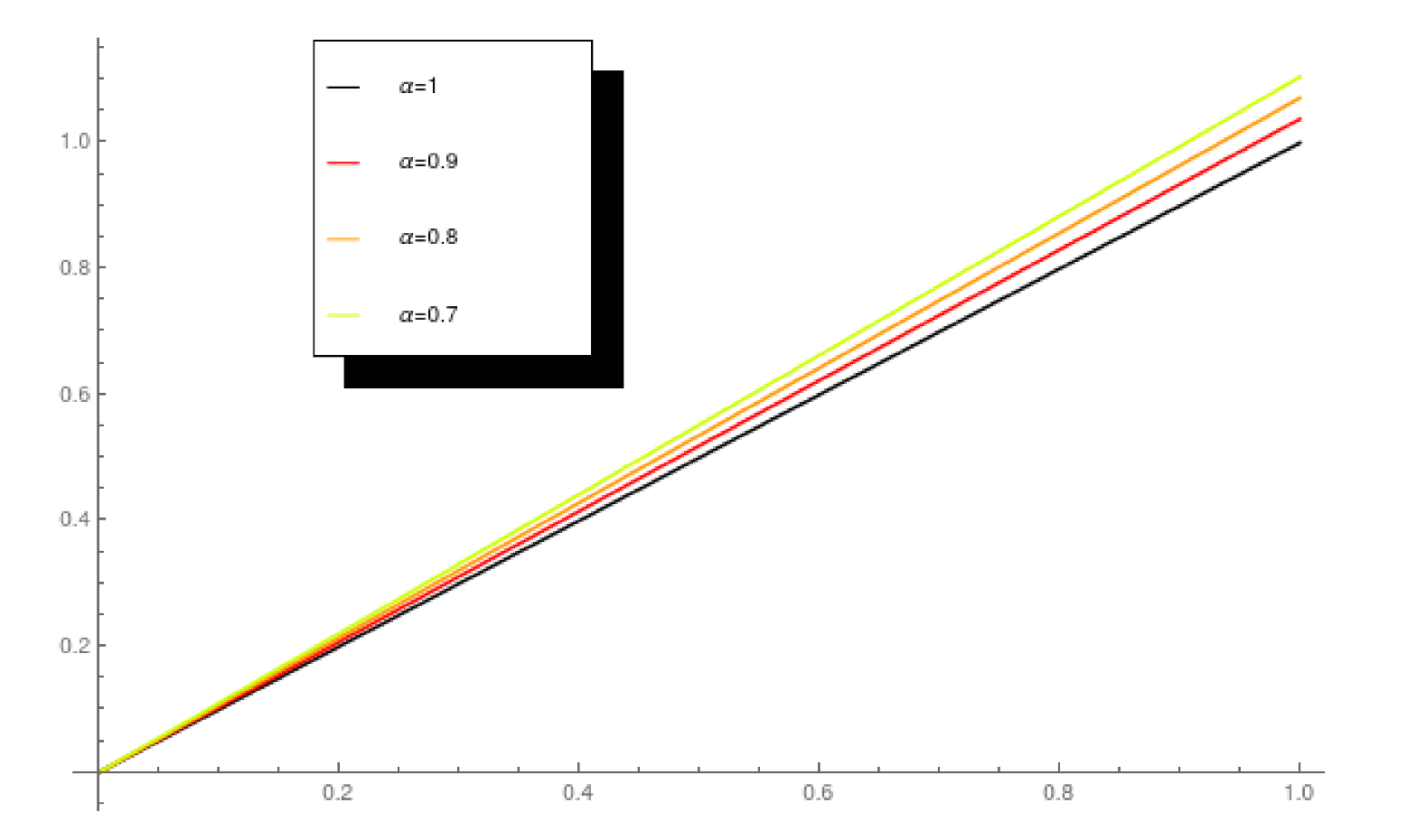
Using PLSM for several fractional values for , we obtain in the same manner:
- For : ,
- For : ,
- For : .
Figure 1 presents the plots of these approximate solutions:
3.4. Application 4: Volterra Nonlinear Fractional Integro-Differential Equation
The next example consists of the Volterra equation ([15,16,20]):
where , together with the condition .
The exact solution of the problem is .
Using PLSM with we find from the condition that and the reminder (9) is
Minimizing the corresponding functional (too long to be included here) we get and which means that we obtain in fact the exact solution . Again we remark that the previous methods in [15] (Euler Wavelets Method), [16] (Lucas Wavelets Method) and [20] (Chebyshev Wavelets Method) were only able to find approximate solutions.
3.5. Application 5: Volterra Fractional Integro-Differential Equation
The problem consists of the Equation (17), together with the conditions
Using PLSM, we choose . By using the initial conditions, we find and the corresponding reminder
and after minimizing the functional , we find the minimum as . Thus, , which is the exact solution of the problem while, again, the previous methods in [19] (Chebyshev Wavelets Method), Ref. [20] (also a Chebyshev Wavelets Method) and [24] (Newton–Kantorovitch Method) were only able to find approximate solutions.
3.6. Application 6: Volterra Nonlinear Fractional Integro-Differential Equation
For by using the same PLSM steps as above we obtain the exact solution of the problem .
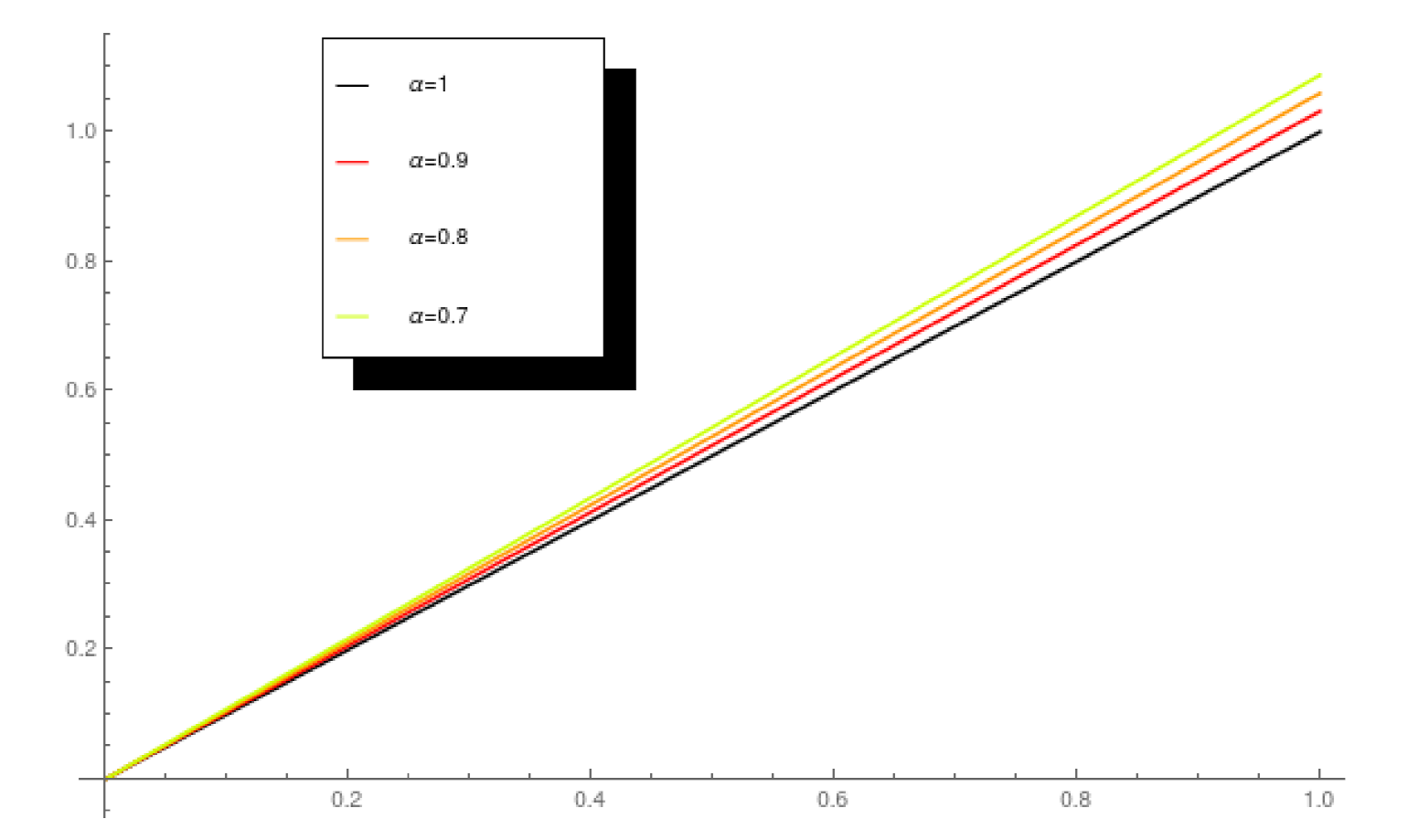
Using PLSM for several fractional values for , we obtain in the same manner:
- For : ,
- For : ,
- For : .
Figure 2 presents the plots of these approximate solutions:
3.7. Application 7: Volterra Fractional Integro-Differential Equation
To this equation, we attach the conditions .
The exact solution of this problem is only known in the case , when the exact solution is .
In this case, using PLSM, we compute the following approximate polynomial solutions:
- Approximate polynomial solution of 5th degree:,
- Approximate polynomial solution of 6th degree:,
- Approximate polynomial solution of 7th degree:,
- Approximate polynomial solution of 8th degree:,
- Approximate polynomial solution of 9th degree:.
Table 1 presents the absolute errors corresponding to these solutions. The errors corresponding to PLSM are smaller than the ones in [16] (Lucas Wavelets Method) and about the same as the ones in [2] (Homotopy Perturbation Method), where only the norms corresponding to the errors were presented.
Table 1 also clearly illustrates the convergence of the method, since the errors decrease as the degree increases.
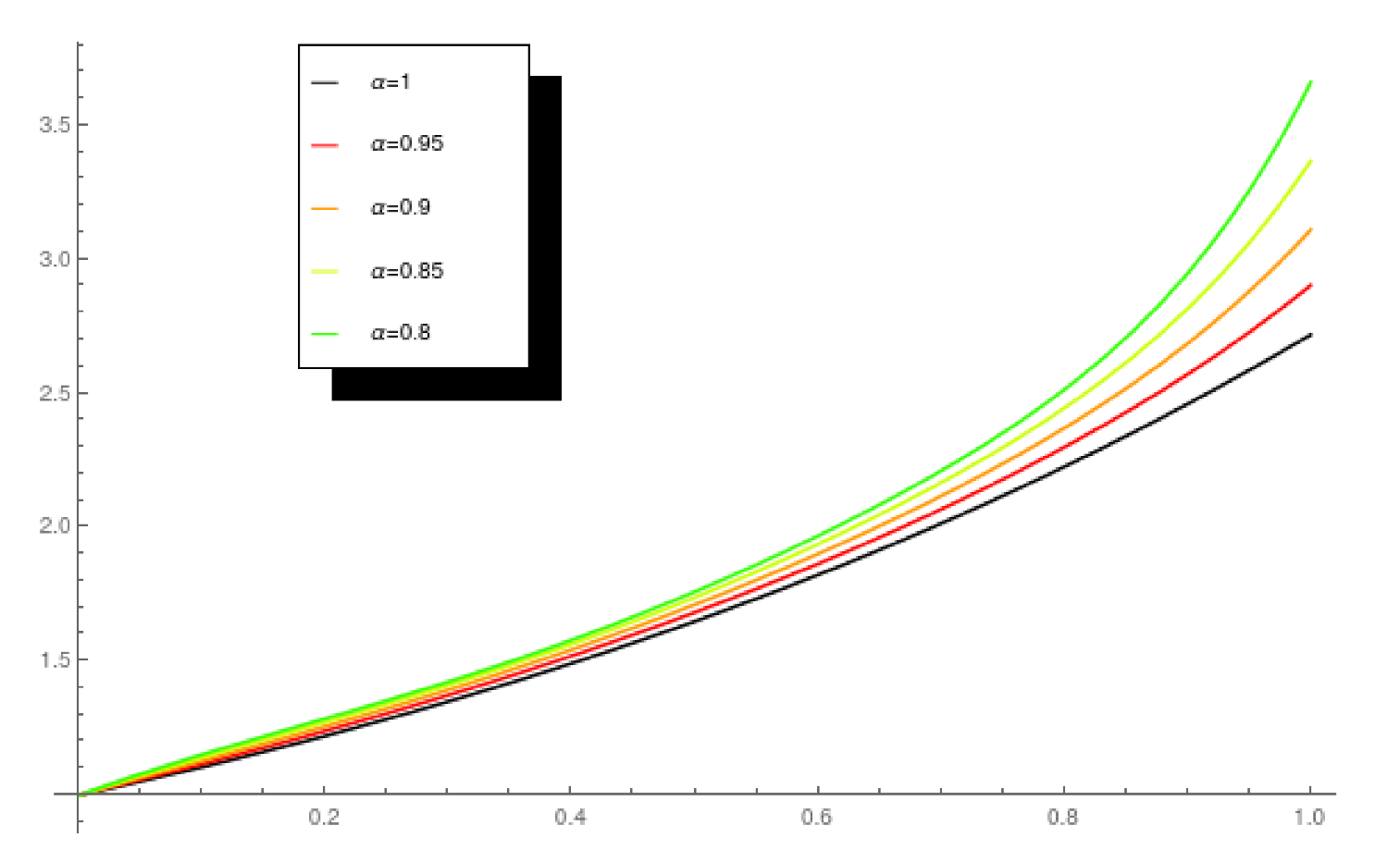
We also compute the following approximate solutions corresponding to fractional values for :
- For : ,
- For : ,
- For : .
3.8. Application 8: Volterra–Fredholm Nonlinear Fractional Integro-Differential Equation
The next application is the Volterra–Fredholm equation ([25]):
where ,
together with the conditions .
While in [25] approximate solutions computed by a Block-pulse Functions Method were presented, by using PLSM we are able to find the exact solution, .
3.9. Application 9: Volterra–Fredholm Nonlinear Fractional Integro-Differential Equation
together with the conditions .
3.10. Application 10: Volterra–Fredholm Fractional Integro-Differential Equation
presented together with the conditions .
3.11. Application 11: Volterra-Fredholm Fractional Integro-Differential Equation
together with the set of conditions .
The exact solution is .
By using PLSM, we compute polynomial approximate solutions of several degrees, among which we present here the following:
- 7th degree approximate polynomial solution:,
- 10th degree approximate polynomial solution:,
- 13th degree approximate polynomial solution:.
Table 2 presents the absolute errors corresponding to these solutions and to the most accurate included in [6] (Legendre Wavelets Method), [14] (Genocchi Polynomials Method) and [20] (Chebyshev Wavelets Method). Table 2 also illustrates again the convergence of the method, as the errors decrease as the degree increases (and this is true for all degrees, not only for the polynomials presented here).
3.12. Application 12: Volterra–Fredholm Fractional Nonlinear Integro-Differential Equation
together with the initial condition .
The exact solution is only known for the case , namely .
By using PLSM, we compute polynomial approximate solutions of several degrees, among which we present here the following:
- 6th degree approximate polynomial solution:,
- 7th degree approximate polynomial solution:,
- 8th degree approximate polynomial solution:,
- 9th degree approximate polynomial solution:.
Table 3 presents the absolute errors corresponding to these solutions and to the most accurate ones presented in [11] (Legendre Collocation Method), [29] (Bernstein Collocation Method) and [16] (Lucas Wavelets Method), illustrating at the same time the convergence of the method.
For fractional values of , we compute by using PLSM the following approximate solutions, plotted in Figure 4:
- For : ,
- For : ,
- For : ,
- For : .
3.13. Application 13: Fredholm Fractional Integro-Differential Equation
The 13th application consists of the Fredholm equation ([11,16,30,31]):
together with the initial condition .
The exact solution is only known for the case , namely . For this case, approximate solutions were previously computed by using a hybrid Fourier and Block-pulse functions method in [30], by using a Taylor polynomials method in [31], by using a Legendre collocation method in [11] and by using a Lucas wavelets method in [16].
By using PLSM, we compute polynomial approximate solutions of several degrees, including the following:
- 10th degree approximate polynomial solution: ,
- 11th degree approximate polynomial solution: ,
- 12th degree approximate polynomial solution: .
Since, unfortunately, the results in [11,16,30,31] were not presented in the same manner or for the same set of values of t, in Table 4 we present the order of the absolute errors corresponding to the most accurate approximations in these studies, together with the ones corresponding to the above approximate solutions computed by PLSM.
3.14. Application 14: Volterra High Order Nonlinear Fractional Integro-Differential Equation
The last application consists of the Volterra equation ([12,32,33]):
together with the boundary conditions .
The exact solution known for the case is and approximate solutions in this case were previously computed by using the Adomian Decomposition Method in [12,32] and by using a CAS wavelets method in [33].
Among the polynomial approximate solutions computed by PLSM, we present:
- 6th degree approximate polynomial solution: ,
- 7th degree approximate polynomial solution: ,
- 8th degree approximate polynomial solution: .
Again, the results in [12,32,33] were not presented as errors for a given set of values of t. The results obtained by the Adomian Decomposition Method were presented in [32] as a plot of the error function corresponding to the approximation, while in [33], the results obtained by the CAS wavelets method were presented by means of the approximate norm-2 () of the error functions corresponding to the approximations.
Computing the corresponding norm-2 for our approximations by PLSM, in Table 5 we present these results together with those corresponding to the most accurate approximations in the previous studies.
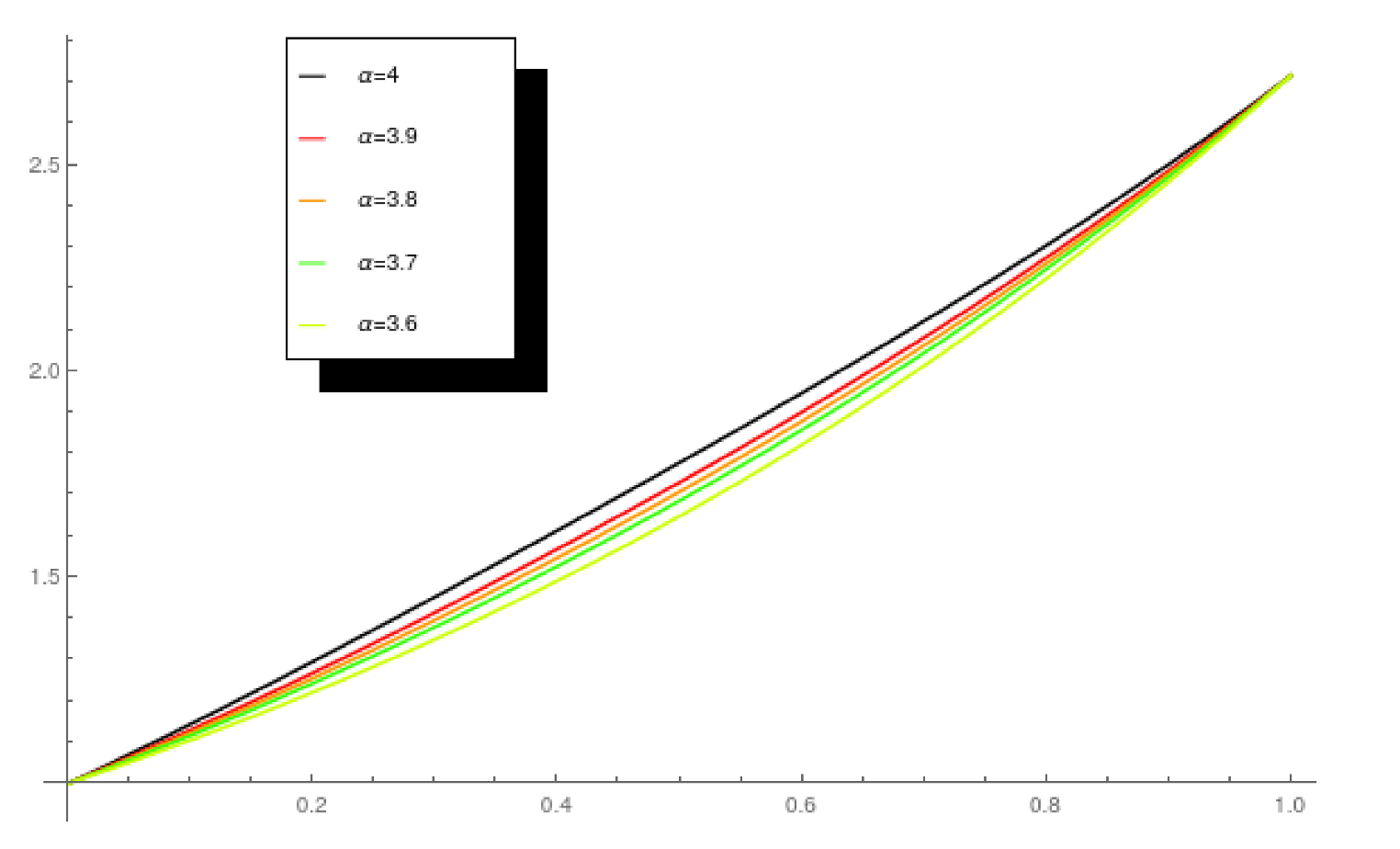
For fractional values of we also computed by using PLSM several approximate solutions, plotted in Figure 5:
4. Conclusions
We presented the Polynomial Least Squares Method as a straightforward, efficient and accurate method to find approximate analytical solutions for a very general class of fractional nonlinear Volterra–Fredholm integro-differential equations.
The paper contains an extensive application list, including most of the usual test problems used for this type of equation and compare our results with previous results obtained by using other well-known methods. For the test problems where the exact solution is a polynomial one, PLSM is able to find the exact solution in a simple manner, while most of the other methods previously used were only able to compute approximate solutions. If the solution is not polynomial, PLSM is able to find approximate solutions, again in a very straightforward way, with errors usually smaller that the ones corresponding to the approximations computed by other methods.
Taking into the account the above considerations, the results of this paper recommend PLSM as a very useful tool in the study of fractional nonlinear integro-differential equations.
Author Contributions
Conceptualization, B.C. and M.S.P.; Methodology, B.C. and M.S.P.; Software, B.C. and M.S.P.; Writing—original draft preparation B.C. and M.S.P.; Writing—review and editing B.C. and M.S.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ghasemi, M.; Tavassoli, M.; Babolian, E. Application of He’s homotopy perturbation method to nonlinear integro-differential equations. Appl. Math. Comput. 2007, 188, 538–548. [Google Scholar] [CrossRef]
- Dehghan, M.; Shakeri, F. Solution of an integro-differential equation arising in oscillating magnetic fields using He’s homotopy perturbation method. Prog. Electromagn. Res. 2008, 78, 361–376. [Google Scholar] [CrossRef] [Green Version]
- Bhrawya, A.H.; Tohidic, E.; Soleymanic, F. A new Bernoulli matrix method for solving high-order linear and nonlinear Fredholm integro-differential equations with piecewise intervals. Appl. Math. Comput. 2012, 219, 482–497. [Google Scholar] [CrossRef]
- Keshavarz, E.; Ordokhani, Y.; Razzaghi, M. Numerical solution of nonlinear mixed Fredholm-Volterra integro-differential equations of fractional order by Bernoulli wavelets. Comput. Methods Differ. Equ. 2019, 7, 163–176. [Google Scholar]
- Rajagopal, N.; Balaji, S.; Seethalakshmi, R.; Balaji, V.S. A new numerical method for fractional order Volterra integro-differential equations. Ain Shams Eng. J. 2020, 11, 171–177. [Google Scholar] [CrossRef]
- Meng, Z.; Wang, L.; Li, H.; Zhang, W. Legendre wavelets method for solving fractionalintegro-differential equations. Int. J. Comput. Math. 2014, 92, 1275–1291. [Google Scholar] [CrossRef]
- Lotfi, M.; Alipanah, A. Legendre spectral element method for solving Volterra-integro differential equations. Results Appl. Math. 2020, 7, 1–11. [Google Scholar] [CrossRef]
- Al-Safi, M.G.S. An efficient numerical method for solving Volterra-Fredholm integro-differential equations of fractional order by using shifted Jacobi-spectral collocation method. Baghdad Sci. J. 2018, 15, 344–351. [Google Scholar]
- Arqub, O. A; Al-Smadi, M.; Shawagfeh, N. Solving Fredholm integro–differential equations using reproducing kernel Hilbert space method. Appl. Math. Comput. 2013, 219, 8938–8948. [Google Scholar]
- Alkan, S.; Hatipoglu, V.F. Approximate solutions of Volterra-Fredholm integro-differential equations of fractional order. Tbil. Math. J. 2017, 10, 1–13. [Google Scholar] [CrossRef]
- Rohaninasab, N.; Maleknejad, K.; Ezzati, R. Numerical solution of high-order Volterra–Fredholm integro-differential equations by using Legendre collocation method. Appl. Math. Comput. 2018, 328, 171–188. [Google Scholar] [CrossRef]
- Momani, S.; Noor, M.A. Numerical methods for fourth-order fractional integro-differential equations. Appl. Math. Comput. 2006, 182, 754–760. [Google Scholar] [CrossRef]
- Farhood, J.K. The solution of nonlinear fractional integro-differential equations by using shifted Chebyshev polynomials method and Adomian decomposition method. Int. J. Educ. Res. 2015, 5, 37–50. [Google Scholar]
- Loh, J.R.; Phang, C.; Isah, A. New operational matrix via Genocchi polynomials for solving Fredholm-Volterra fractional integro-differential equations. Adv. Math. Phys. 2017, 2017, 3821870. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, L. Solving nonlinear Volterra integro-differential equations of fractional order by using Euler wavelet method. Adv. Differ. Equ. 2017, 2017, 27. [Google Scholar] [CrossRef] [Green Version]
- Dehestani, H.; Ordokhani, Y.; Razzaghi, M. Combination of Lucas wavelets with Legendre–Gauss quadrature for fractional Fredholm-Volterra integro-differential equations. J. Comput. Appl. Math. 2021, 382, 1–18. [Google Scholar] [CrossRef]
- Dehghan, M.; Salehi, R. The numerical solution of the non-linear integro-differential equations based on the meshless method. J. Comput. Appl. Math. 2012, 236, 2367–2377. [Google Scholar] [CrossRef] [Green Version]
- Zhu, L.; Fan, Q. Numerical solution of nonlinear fractional-order Volterra integro-differential equations by SCW. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 1203–1213. [Google Scholar] [CrossRef]
- Mohyud-Din, S.T.; Khan, H.; Arif, M.; Rafiq, M. Chebyshev wavelet method to nonlinear fractional Volterra–Fredholm integro-differential equations with mixed boundary conditions. Adv. Mech. Eng. 2017, 9, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Zhou, F.; Xu, X. Numerical solution of fractional Volterra-Fredholm integro-differential equations with mixed boundary conditions via Chebyshev wavelet method. Int. J. Comput. Math. 2018, 96, 436–456. [Google Scholar] [CrossRef]
- Parand, K.; Nikarya, M. Application of Bessel functions for solving differential and integro-differential equations of the fractional order. Appl. Math. Model. 2014, 38, 4137–4147. [Google Scholar] [CrossRef]
- Ordokhani, Y.; Dehestani, H. Numerical solution of linear Fredholm-Volterra integro-differential equations of fractional order. World J. Model. Simul. 2016, 12, 204–216. [Google Scholar]
- Ordokhani, Y.; Rahimi, N. Numerical solution of fractional Volterra integro-differential equations via the rationalized Haar functions. J. Sci. Kharazmi Univ. 2014, 14, 211–224. [Google Scholar]
- Susahab, D.N.; Jahanshahi, M. Numerical solution of nonlinear fractional Volterra-Fredholm integro-differential equations with mixed boundary conditions. Int. J. Ind. Math. 2015, 7, 63–69. [Google Scholar]
- Ali, M.R.; Hadhoud, A.R.; Srivastava, H.M. Solution of fractional Volterra–Fredholm integro-differential equations under mixed boundary conditions by using the HOBW method. Adv. Differ. Equ. 2019, 2019, 115. [Google Scholar] [CrossRef] [Green Version]
- Saadatmandi, A.; Akhlaghi, S. Using hybrid of Block-Pulse functions and Bernoulli polynomials to solve fractional Fredholm-Volterra integro-differential equations. Sains Malays. 2020, 49, 953–962. [Google Scholar] [CrossRef]
- Sabermahani, S.; Ordokhani, Y. A new operational matrix of Müntz-Legendre polynomials and Petrov-Galerkin method for solving fractional Volterra-Fredholm integro-differential equations. Comput. Methods Differ. Equ. 2020, 8, 408–423. [Google Scholar]
- Salman, N.K.; Mustafa, M.M. Numerical solution of fractional Volterra-Fredholm integro-differential equation using Lagrange polynomials. Baghdad Sci. J. 2020, 17, 1234–1240. [Google Scholar] [CrossRef]
- Yuzbasi, S. A collocation method based on Bernstein polynomials to solve nonlinear Fredholm-Volterra integro-differential equations. Appl. Math. Comput. 2016, 273, 142–154. [Google Scholar]
- Asady, B.; Kajani, M.T.; Vencheh, A.H.; Heydari, A. Direct method for solving integro-differential equations using hybrid Fourier and block-pulse functions. Int. J. Comput. Math. 2005, 82, 889–895. [Google Scholar] [CrossRef]
- Kurt, N.; Sezer, M. Polynomial solution of high-order linear Fredholm integro-differential equations with constant coefficients. J. Frankl. Inst. 2008, 345, 839–850. [Google Scholar] [CrossRef]
- Hashim, I. Adomian decomposition method for solving BVPs for fourth-order integro-differential equations. J. Comput. Appl. Math. 2005, 193, 658–664. [Google Scholar] [CrossRef] [Green Version]
- Saeedi, H.; Moghadam, M.M. Numerical solution of nonlinear Volterra integro-differential equations of arbitrary order by CAS wavelets. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 1216–1226. [Google Scholar] [CrossRef]
Figure 1.
Approximate solutions of (15) for several values of .
Figure 1.
Approximate solutions of (15) for several values of .

Figure 2.
Approximate solutions of (18) for several values of .
Figure 2.
Approximate solutions of (18) for several values of .

Figure 3.
Approximate solutions of (19) for several values of .
Figure 3.
Approximate solutions of (19) for several values of .

Figure 4.
Approximate solutions of (24) for several values of .
Figure 4.
Approximate solutions of (24) for several values of .

Figure 5.
Approximate solutions of (26) for several values of .
Figure 5.
Approximate solutions of (26) for several values of .


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Comparison of the absolute errors of the approximate solutions for problem (19) corresponding to .
Table 1.
Comparison of the absolute errors of the approximate solutions for problem (19) corresponding to .
| t | [16] | PLSM 5-th deg | PLSM 6-th deg. | PLSM 7-th deg. | PLSM 8-th deg. | PLSM 9-th deg |
|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0.1 | ||||||
| 0.2 | ||||||
| 0.3 | ||||||
| 0.4 | ||||||
| 0.5 | ||||||
| 0.6 | ||||||
| 0.7 | ||||||
| 0.8 | ||||||
| 0.9 | ||||||
| 1 |
Table 2.
Comparison of the absolute errors of the approximate solutions for problem (23).
Table 2.
Comparison of the absolute errors of the approximate solutions for problem (23).
| t | [6] | [14] | [20] | PLSM 7-th deg. | PLSM 10 deg. | PLSM 13 deg |
|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 0 | 0 |
Table 3.
Comparison of the absolute errors of the approximate solutions for problem (24) corresponding to .
Table 3.
Comparison of the absolute errors of the approximate solutions for problem (24) corresponding to .
| t | [11] | [29] | [16] | PLSM 6-th | PLSM 7-th | PLSM 8-th | PLSM 9-th |
|---|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 |
Table 4.
Comparison of the order of the absolute errors of the approximate solutions for problem (25) corresponding to .
Table 4.
Comparison of the order of the absolute errors of the approximate solutions for problem (25) corresponding to .
| [30] | [31] | [11] | [16] | PLSM 10-th | PLSM 11-th | PLSM 12-th |
|---|---|---|---|---|---|---|
Table 5.
Comparison of the order of the absolute errors of the approximate solutions for problem (26) corresponding to .
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Căruntu, B.; Paşca, M.S. The Polynomial Least Squares Method for Nonlinear Fractional Volterra and Fredholm Integro-Differential Equations. Mathematics 2021, 9, 2324. https://0-doi-org.brum.beds.ac.uk/10.3390/math9182324
AMA Style
Căruntu B, Paşca MS. The Polynomial Least Squares Method for Nonlinear Fractional Volterra and Fredholm Integro-Differential Equations. Mathematics. 2021; 9(18):2324. https://0-doi-org.brum.beds.ac.uk/10.3390/math9182324
Chicago/Turabian StyleCăruntu, Bogdan, and Mădălina Sofia Paşca. 2021. "The Polynomial Least Squares Method for Nonlinear Fractional Volterra and Fredholm Integro-Differential Equations" Mathematics 9, no. 18: 2324. https://0-doi-org.brum.beds.ac.uk/10.3390/math9182324
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.