
A Simplified and High Accuracy Algorithm of RSSI-Based Localization Zoning for Children Tracking In-Out the School Buses Using Bluetooth Low Energy Beacon


Abstract
:1. Introduction
2. Materials and Methods
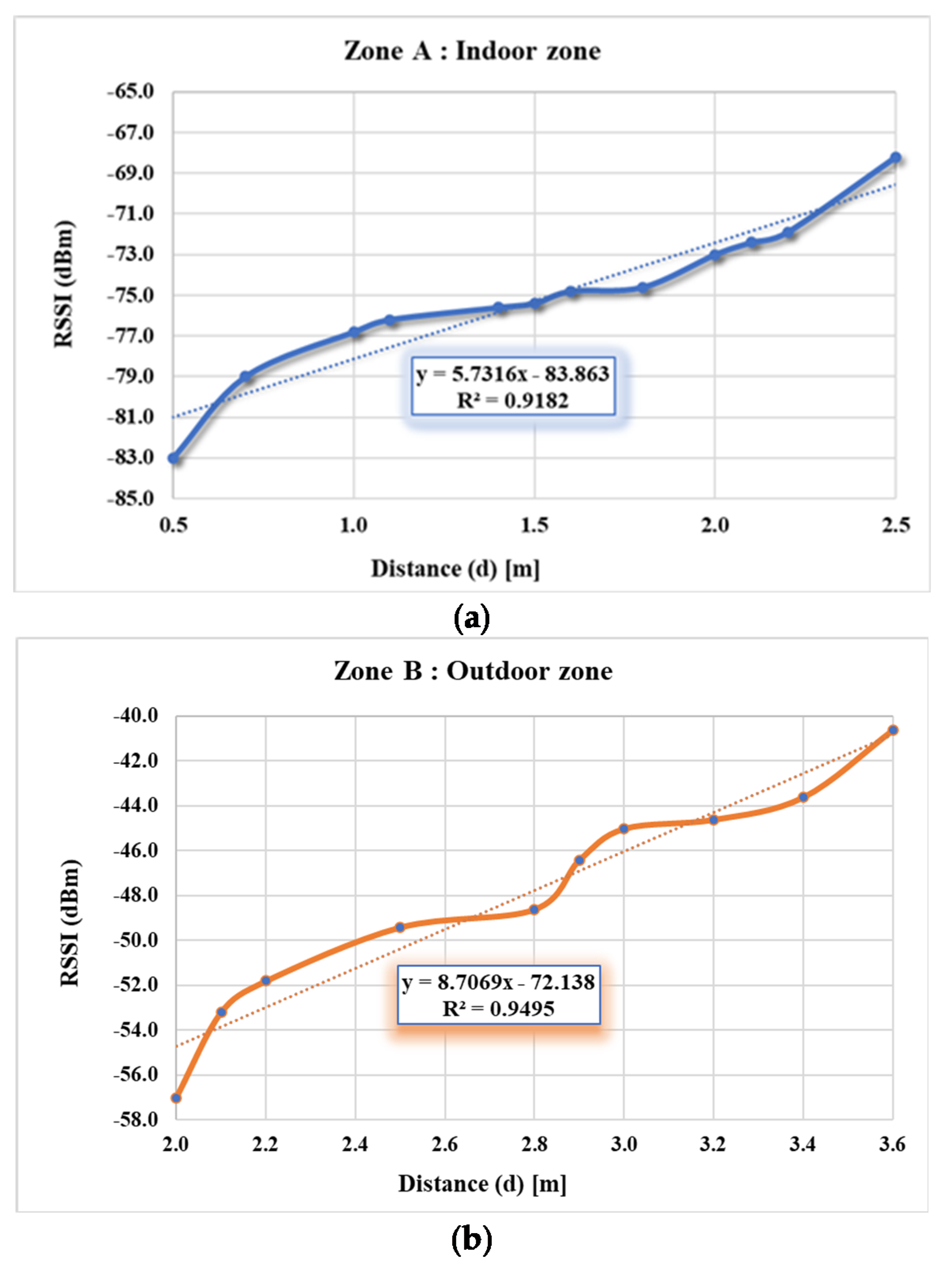
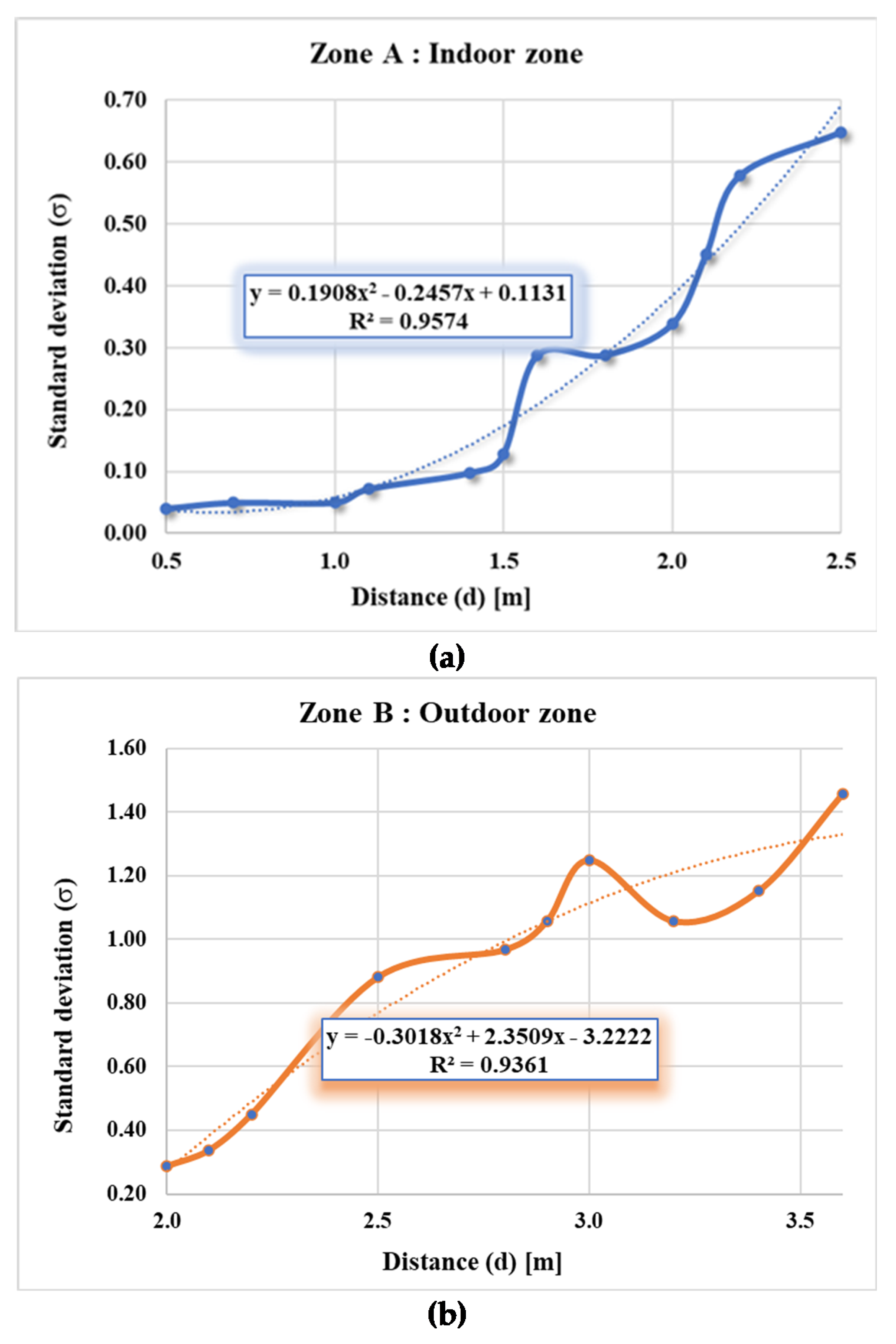
2.1. RSSI Distance Model
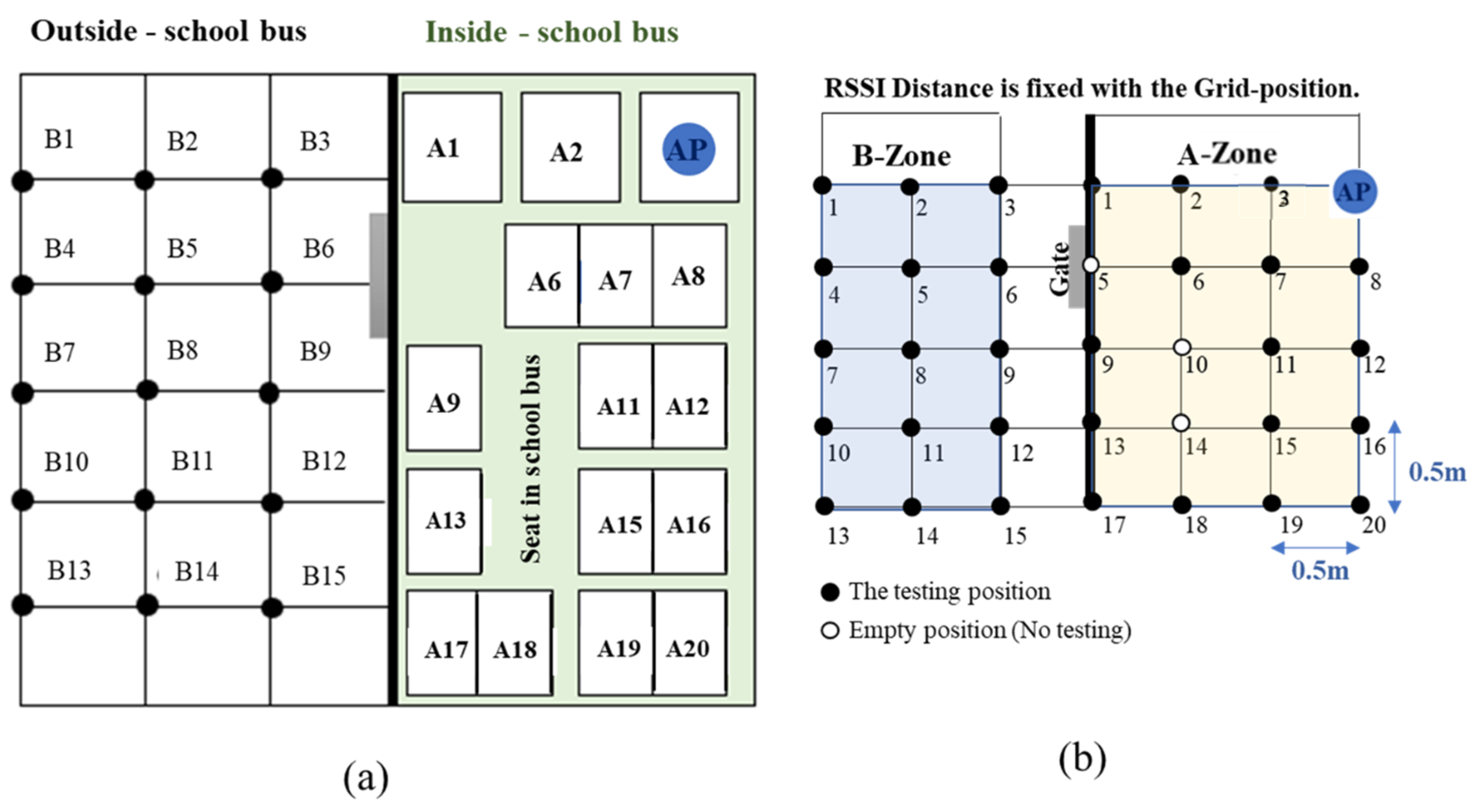
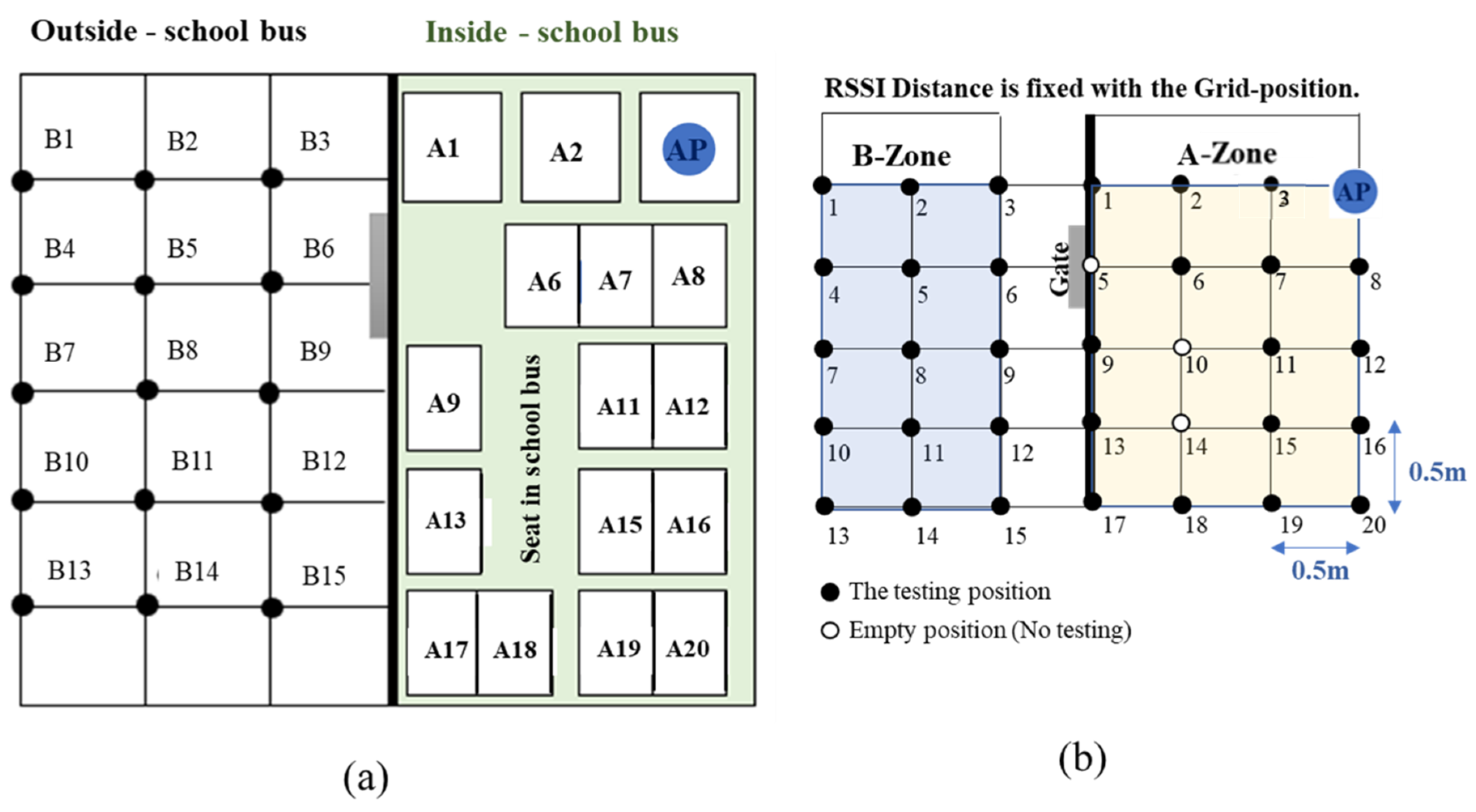
2.2. RSSI Mapping and Experimental Setup
2.3. Tracking and Calculating a Location from Signal Strength
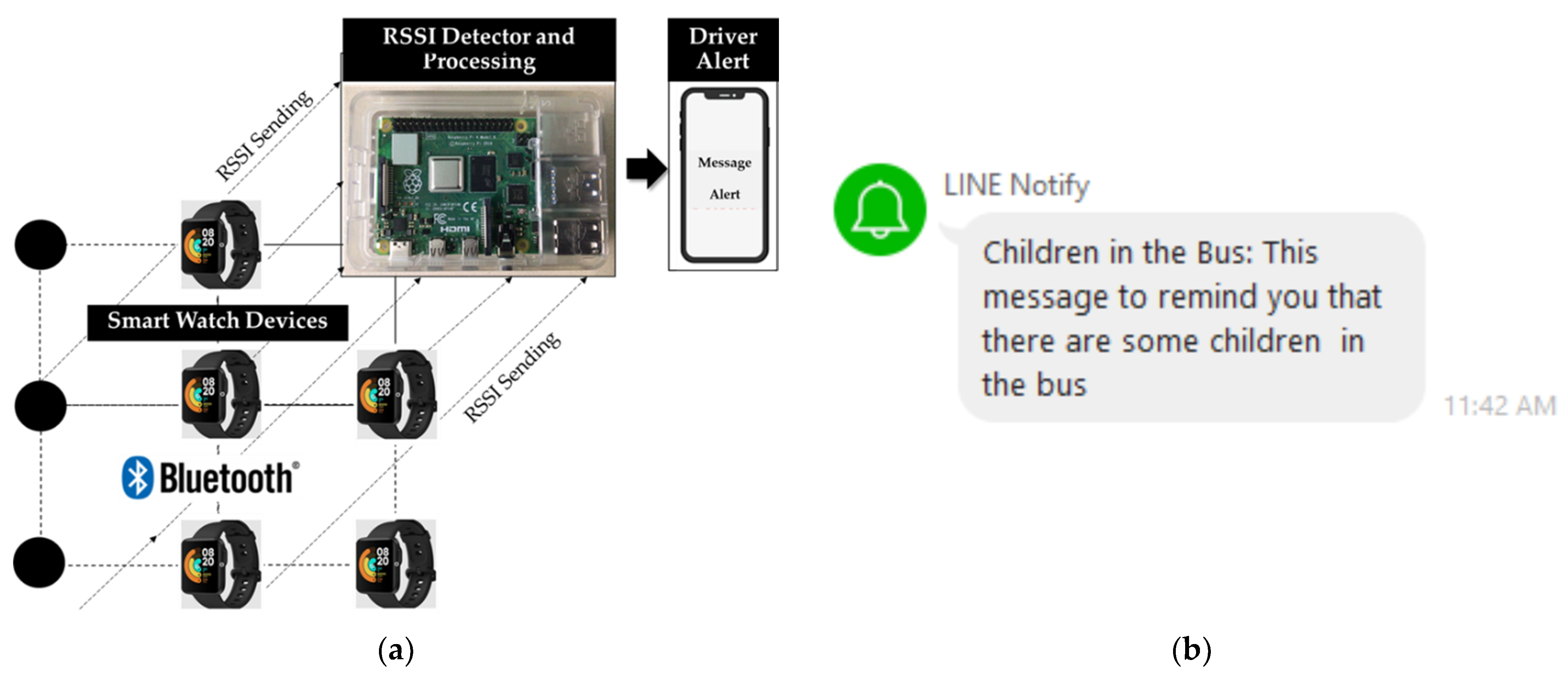
2.4. Description of the System
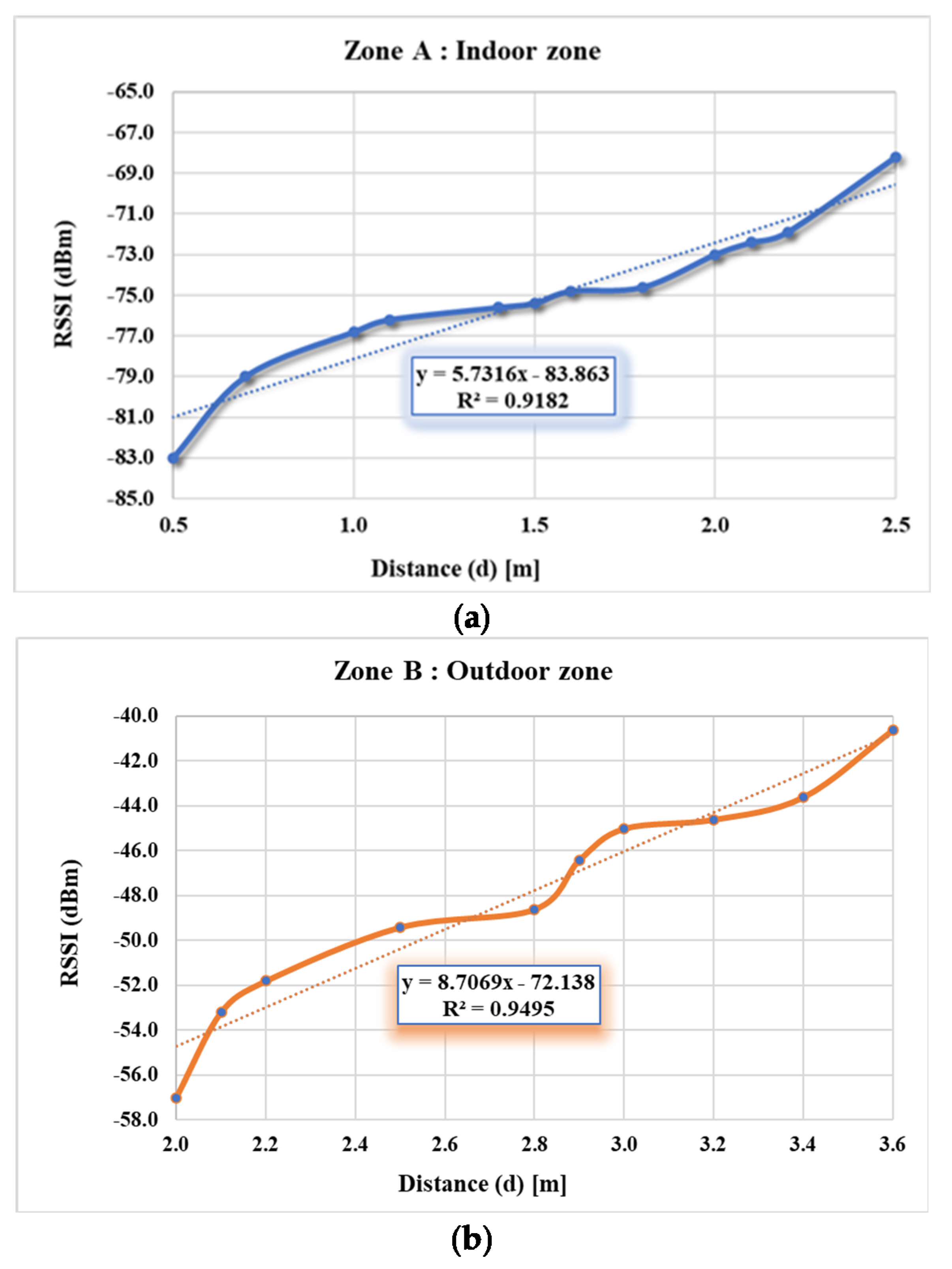
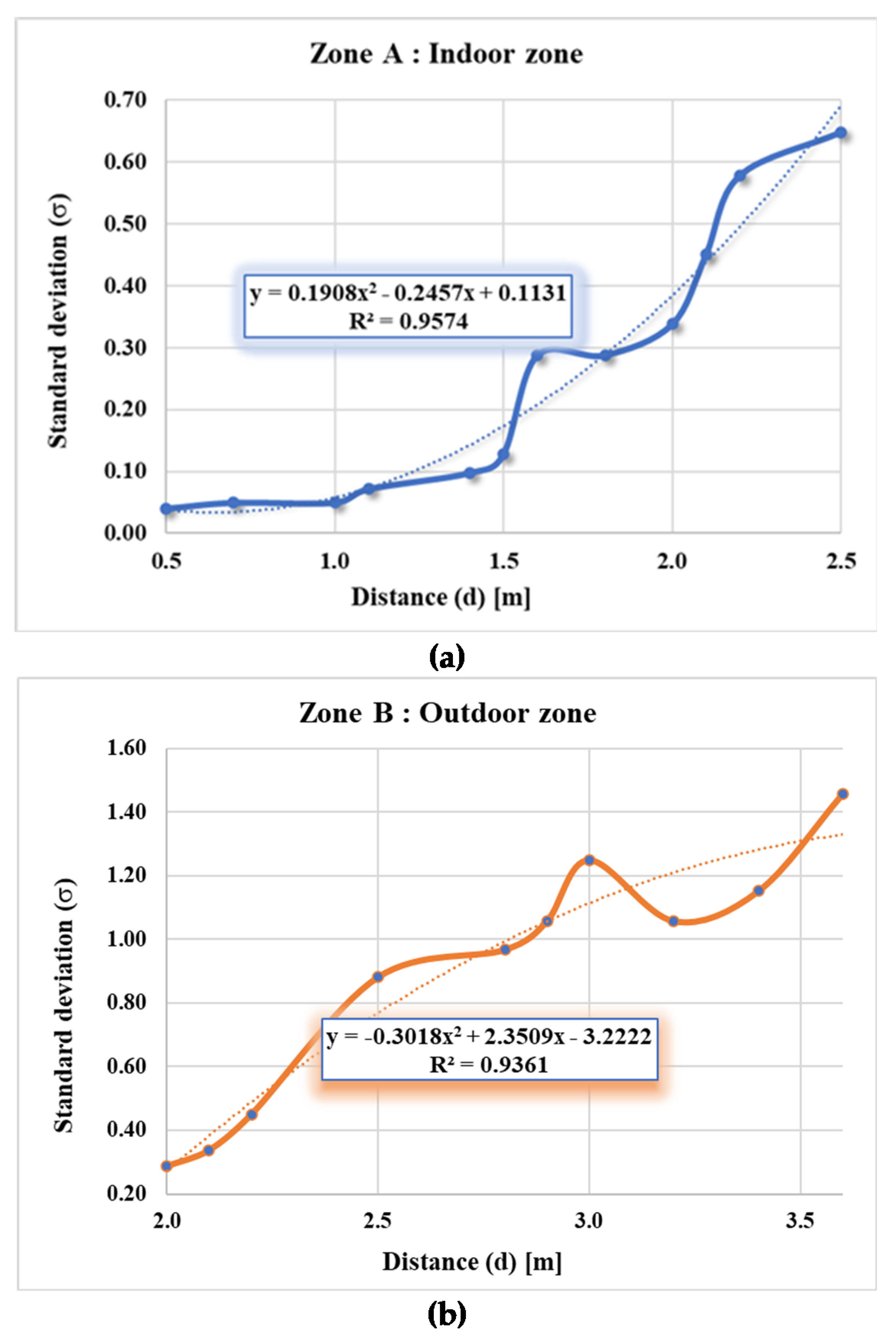
3. Results
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Dardari, D.; Closas, P.; Djuric, P.M. Indoor tracking: Theory, methods, and technologies. IEEE Trans. Veh. Technol. 2015, 64, 1263–1278. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Shieh, W.Y.; Hsu, C.C.J.; Wang, T.H. Vehicle Positioning and Trajectory Tracking by Infrared Signal-Direction Discrimination for Short-Range Vehicle-To-Infrastructure Communication Systems. IEEE Trans. Intell. Transp. Syst. 2018, 19, 368–379. [Google Scholar] [CrossRef]
- Ma, F.; Liu, F.; Zhang, X.; Wang, P.; Bai, H.; Guo, H. An ultrasonic positioning algorithm based on maximum correntropy criterion extended Kalman filter weighted centroid. Signal Image Video Process. 2018, 12, 1207–1215. [Google Scholar] [CrossRef]
- Lee, N.; Ahn, S.; Han, D. AMID: Accurate magnetic indoor localization using deep learning. Sensors 2018, 18, 1598. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, J.; Chen, R.; Pei, L.; Guinness, R.; Kuusniemi, H. A hybrid smartphone indoor positioning solution for mobile LBS. Sensors 2012, 12, 17208–17233. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.R.; Chen, Y.; Pei, L.; Chen, L. iParking: An intelligent indoor location-based smartphone parking service. Sensors 2012, 12, 14612–14629. [Google Scholar] [CrossRef]
- Wu, T.; Liu, J.; Li, Z.; Liu, K.; Xu, B. Accurate smartphone indoor visual positioning based on a high-precision 3D photorealistic map. Sensors 2018, 18, 1974. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mandai, A.; Lopes, C.V.; Givargis, T.; Haghighat, A.; Jurdak, R.; Baldi, P. Beep: 3D indoor positioning using audible sound. In Proceedings of the 2005 2nd IEEE Consumer Communications and Networking Conference, CCNC2005, Las Vegas, NV, USA, 6 January 2005. [Google Scholar]
- Rishabh, I.; Kimber, D.; Adcock, J. Indoor localization using controlled ambient sounds. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012. [Google Scholar]
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef] [Green Version]
- Tekler, Z.D.; Low, R.; Gunay, B.; Andersen, R.K.; Blessing, L. A scalable Bluetooth Low Energy approach to identify occupancy patterns and profiles in office spaces. Build. Environ. 2020, 171, 106681. [Google Scholar] [CrossRef]
- Filippoupolitis, A.; Oliff, W.; Loukas, G. Occupancy detection for building emergency management using BLE beacons. Commun. Comput. Inf. Sci. 2016, 659, 233–240. [Google Scholar]
- Tekler, Z.D.; Low, R.; Blessing, L. Using smart technologies to identify occupancy and plug-in appliance interaction patterns in an office environment. IOP Conf. Ser. Mater. Sci. Eng. 2019, 609. [Google Scholar] [CrossRef]
- Choi, M.; Park, W.K.; Lee, I. Smart office energy management system using bluetooth low energy based beacons and a mobile app. In Proceedings of the 2015 IEEE International Conference on Consumer Electronics, ICCE 2015, Las Vegas, NV, USA, 26 March 2015. [Google Scholar] [CrossRef]
- Faragher, R.; Harle, R. Location fingerprinting with bluetooth low energy beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Li, W.; Wei, D.; Lai, Q.; Li, X.; Yuan, H. Geomagnetism-aided indoor Wi-Fi radio-map construction via smartphone crowdsourcing. Sensors 2018, 18, 1462. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Faragher, D.; Harle, R. An analysis of the accuracy of bluetooth low energy for indoor positioning applications. In Proceedings of the 27th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 201–210. [Google Scholar]
- Neburka, J.; Tlamsa, Z.; Benes, V.; Polak, L.; Kaller, O.; Bolecek, L.; Sebesta, J.; Kratochvil, T. Study of the performance of RSSI based bluetooth smart indoor positioning. In Proceedings of the 26th International Conference Radioelektronika, Kosice, Slovakia, 19–20 April 2016. [Google Scholar] [CrossRef]
- Golestani, A.; Petreska, N.; Wilfert, D.; Zimmer, C. Improving the precision of RSSI-based low-energy localization using path loss exponent estimation. In Proceedings of the 2014 11th Workshop on Positioning, Navigation and Communication, Dresden, Germany, 26 June 2014. [Google Scholar] [CrossRef]
- Nowak, T.; Hartmann, M.; Zech, T.; Thielecke, J. A path loss and fading model for RSSI-based localization in forested areas. In Proceedings of the 2016 6th IEEE-APS Topical Conference on Antennas and Propagation in Wireless Communications, IEEE APWC 2016, Cairns, Australia, 19–23 September 2016. [Google Scholar] [CrossRef]
- Nguyen, H.A.; Guo, H.; Low, K.S. Real-time estimation of sensor node’s position using particle swarm optimization with log-barrier constraint. IEEE Trans. Instrum. Meas. 2011, 60, 3619–3628. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Bluetooth Low Energy Information |
|---|---|
| Signal Rate | 720 Kbps |
| Normal Range | 10 m |
| Transmission Power | 1 dBm |
| Energy Consumption | 15 mA |
| Hardware cost | low |
| Zone A (Indoor) | Zone B (Outdoor) | ||||||
|---|---|---|---|---|---|---|---|
| Distance (d) (m) | SD | Distance (d) (m) | SD | ||||
| 0.5 | −83.0 | −83.5 | 0.04 | 2.0 | −57.0 | −58.2 | 0.29 |
| 0.7 | −79.0 | −79.5 | 0.05 | 2.1 | −53.2 | −54.5 | 0.34 |
| 1.0 | −76.8 | −77.3 | 0.05 | 2.2 | −51.8 | −53.3 | 0.45 |
| 1.1 | −76.2 | −76.8 | 0.07 | 2.5 | −49.4 | −51.5 | 0.88 |
| 1.4 | −75.6 | −76.3 | 0.10 | 2.8 | −48.6 | −50.8 | 0.97 |
| 1.5 | −75.4 | −76.2 | 0.13 | 2.9 | −46.4 | −48.7 | 1.06 |
| 1.6 | −74.8 | −76.0 | 0.29 | 3.0 | −45.0 | −47.5 | 1.25 |
| 1.8 | −74.6 | −75.8 | 0.29 | 3.2 | −44.6 | −46.9 | 1.06 |
| 2.0 | −73.0 | −74.3 | 0.34 | 3.4 | −43.6 | −46.0 | 1.15 |
| 2.1 | −72.4 | −73.9 | 0.45 | 3.6 | −40.6 | −43.3 | 1.46 |
| 2.2 | −71.9 | −73.6 | 0.58 | ||||
| 2.5 | −68.2 | −70.0 | 0.65 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sakphrom, S.; Suwannarat, K.; Haiges, R.; Funsian, K. A Simplified and High Accuracy Algorithm of RSSI-Based Localization Zoning for Children Tracking In-Out the School Buses Using Bluetooth Low Energy Beacon. Informatics 2021, 8, 65. https://0-doi-org.brum.beds.ac.uk/10.3390/informatics8040065
Sakphrom S, Suwannarat K, Haiges R, Funsian K. A Simplified and High Accuracy Algorithm of RSSI-Based Localization Zoning for Children Tracking In-Out the School Buses Using Bluetooth Low Energy Beacon. Informatics. 2021; 8(4):65. https://0-doi-org.brum.beds.ac.uk/10.3390/informatics8040065
Chicago/Turabian StyleSakphrom, Siraporn, Korakot Suwannarat, Rina Haiges, and Krit Funsian. 2021. "A Simplified and High Accuracy Algorithm of RSSI-Based Localization Zoning for Children Tracking In-Out the School Buses Using Bluetooth Low Energy Beacon" Informatics 8, no. 4: 65. https://0-doi-org.brum.beds.ac.uk/10.3390/informatics8040065