
“Saving Precious Seconds”—A Novel Approach to Implementing a Low-Cost Earthquake Early Warning System with Node-Level Detection and Alert Generation



 , , , ,
, , , ,
Abstract
:1. Introduction
2. Background on Earthquake Early Warning (EEW) Systems
2.1. Current State-of-the-Art of Low-Cost EEW Solutions
2.2. Research Gap
3. Methods
3.1. Explore Appropriate WAN Topology
3.1.1. Virtual Private Networks (VPN)
3.1.2. Software-Defined WAN (SD-WAN)
3.2. Selection of SD-WAN Solution for a Community-Engaged EEW Sensor Network
3.2.1. Hole Punching to Overcome Network Address Translation (NAT) Challenges
3.2.2. Selection of Appropriate UDP Hole-Punching SD-WAN Solution
3.3. Selection of Suitable Sensors for the Proposed MEMS-Based EEW Network
3.4. Selection of an Appropriate EEW Algorithm
4. Implementation and Results
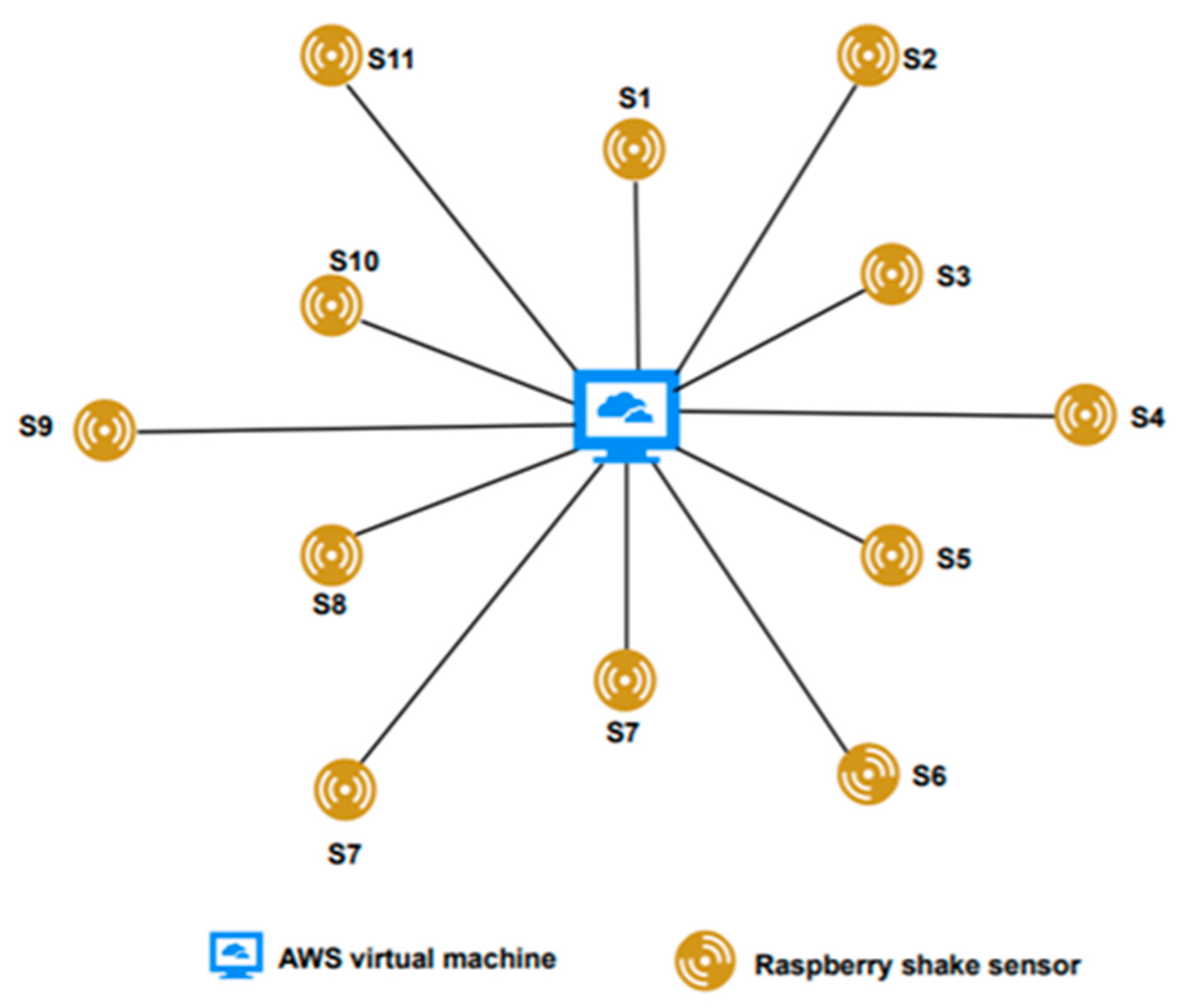
4.1. Implementation of a Raspberry Shake (RS) Sensor Network
4.1.1. Implementation of Appropriate Security Measures for RS Sensor Network
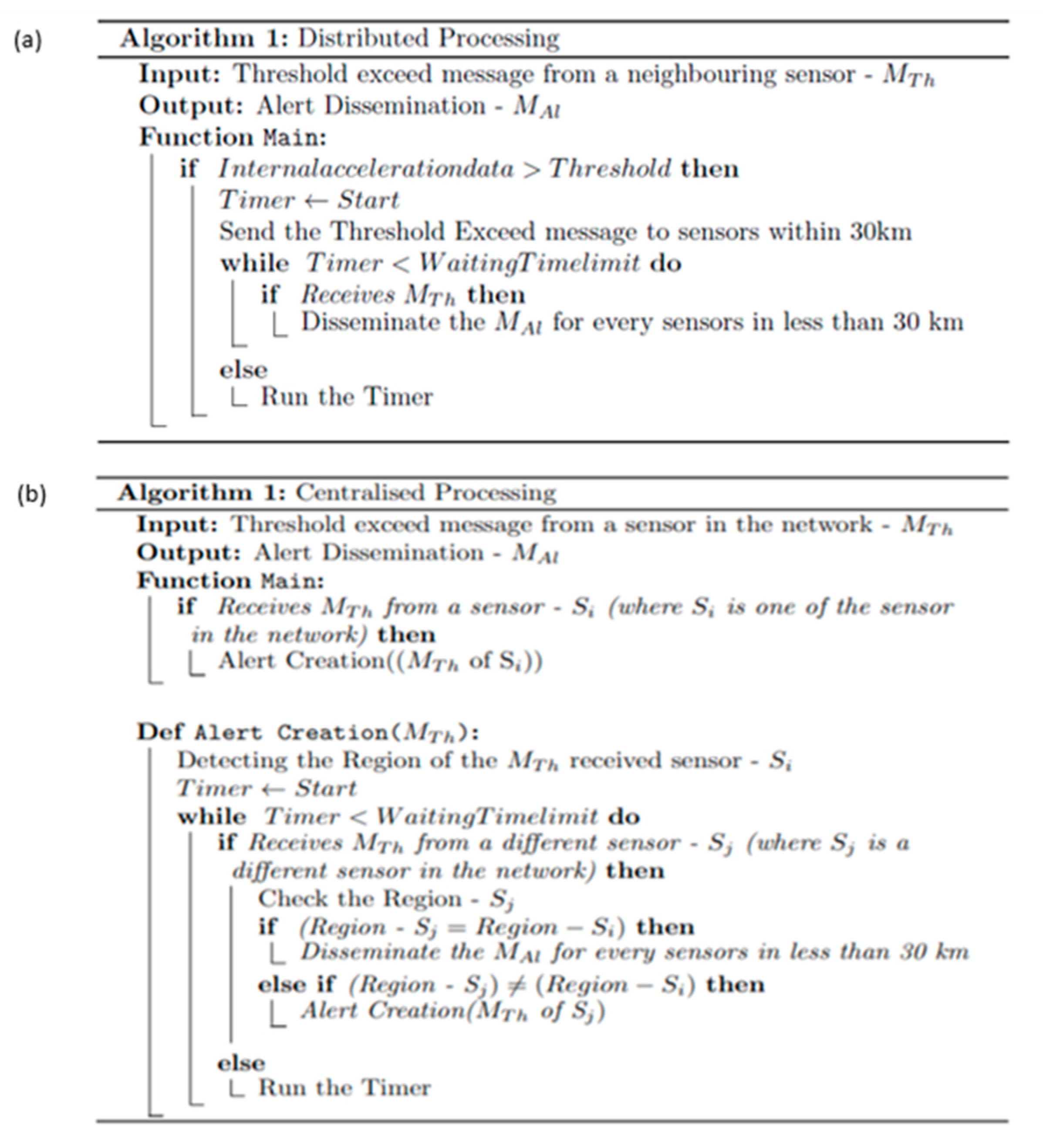
4.2. Implementation of Modified PLUM EEW Algorithm within RS Sensor Environment
4.3. Defining and Calculating System Latency for the Proposed EEW Architecture
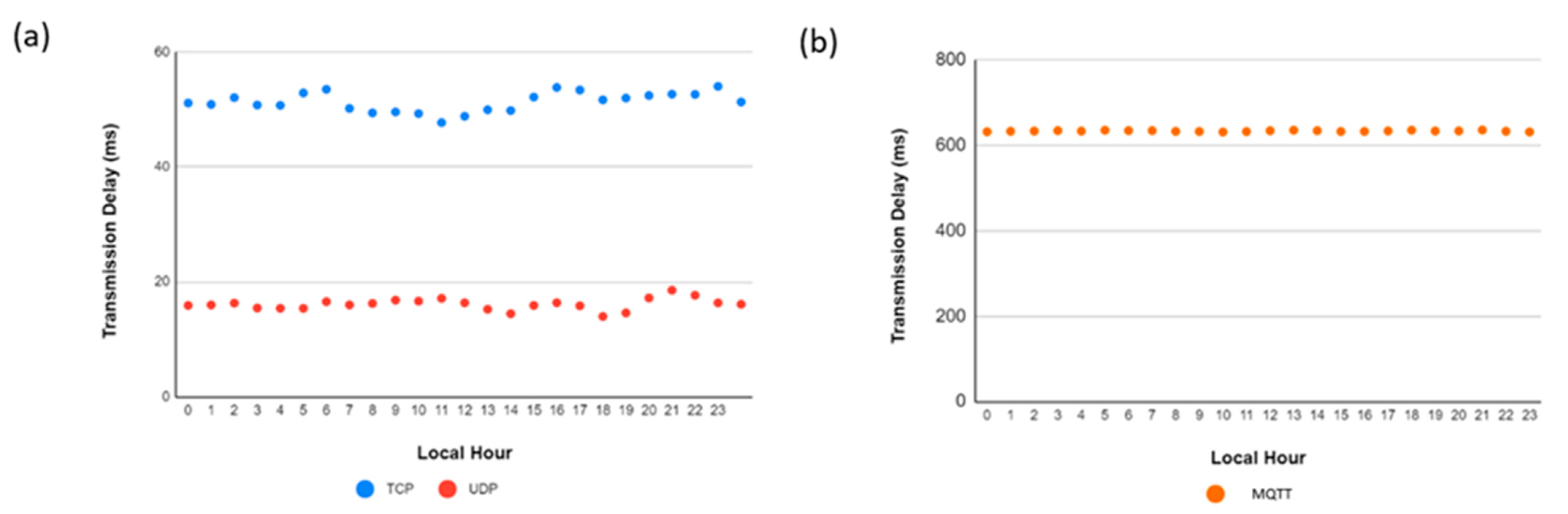
4.3.1. Transmission Delay (δttransmission)
4.3.2. Detection Time (δtdetect)
4.3.3. S-wave Travel Time (δts-wave_travel)
4.3.4. System Latency Calculation Scenarios
Calculating the Transmission Delay of the Network (δttransmission)
Calculating the Detection Time (δtdetect) of the Network
Calculating the S-Wave Travel Time (δts-wave_travel) of the Network
Comparison of System Latencies for the Decentralised and Centralised EEW Architectures
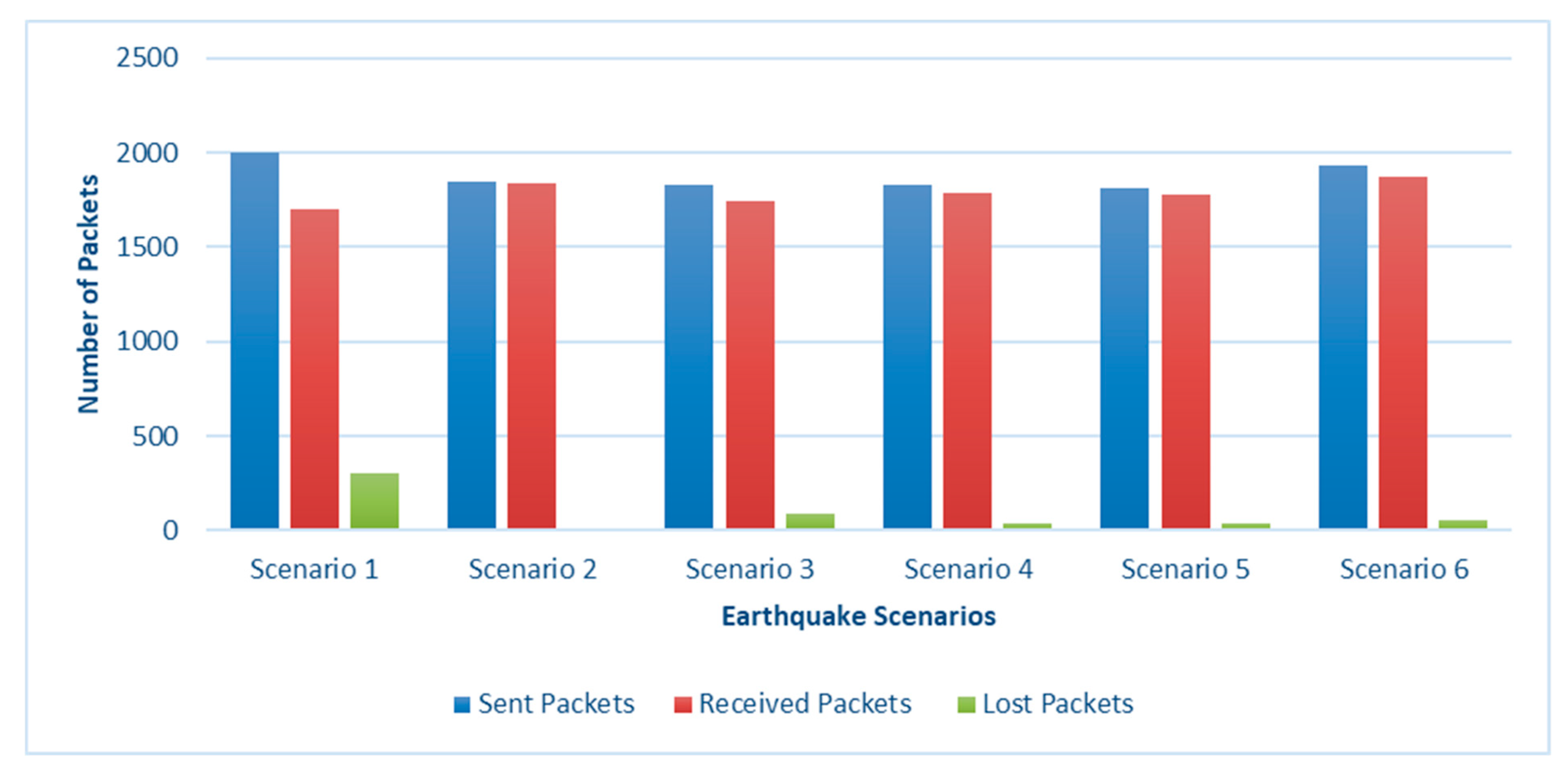
Calculation of Packet Loss
5. Discussion
Limitations and Future Work
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
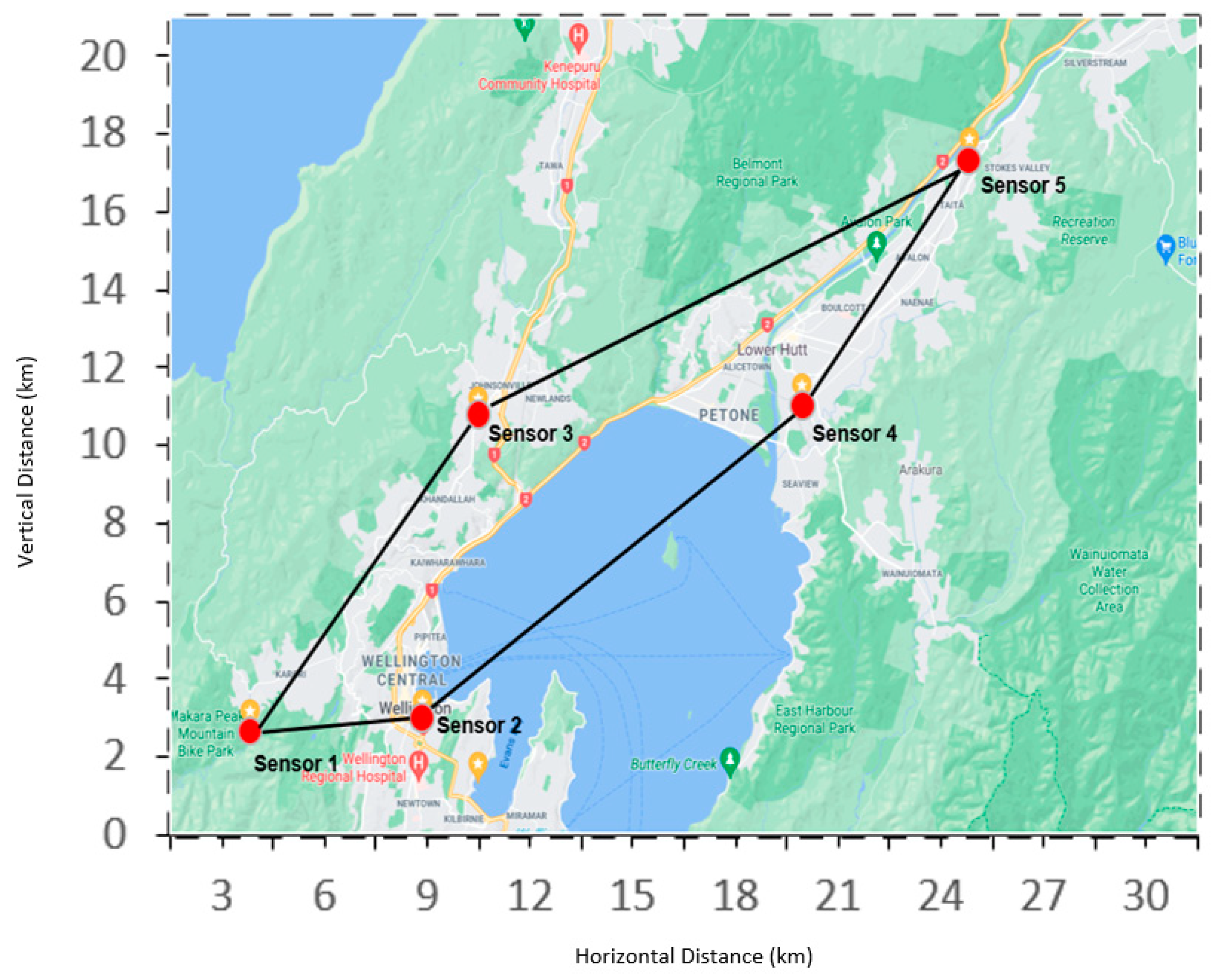
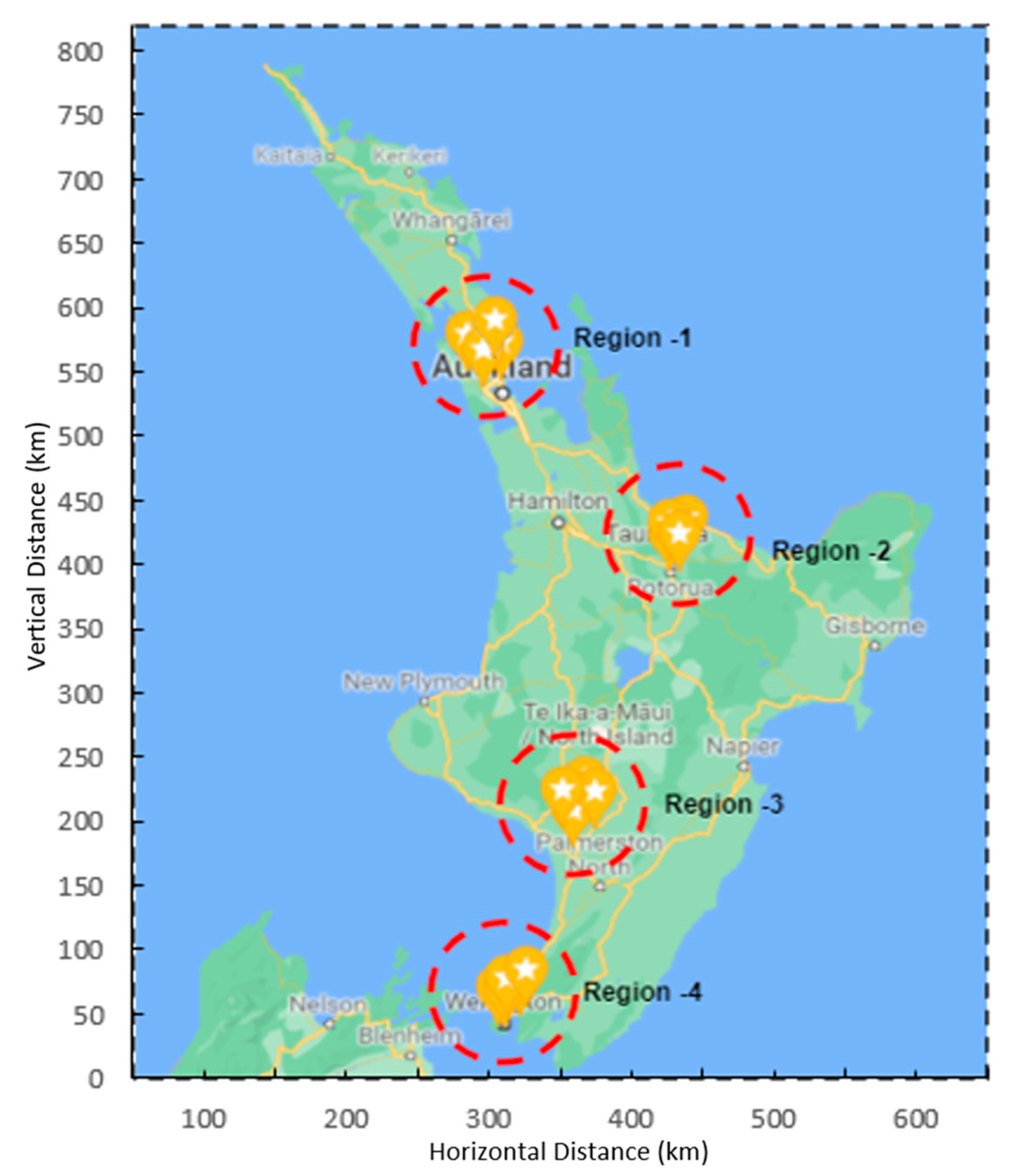
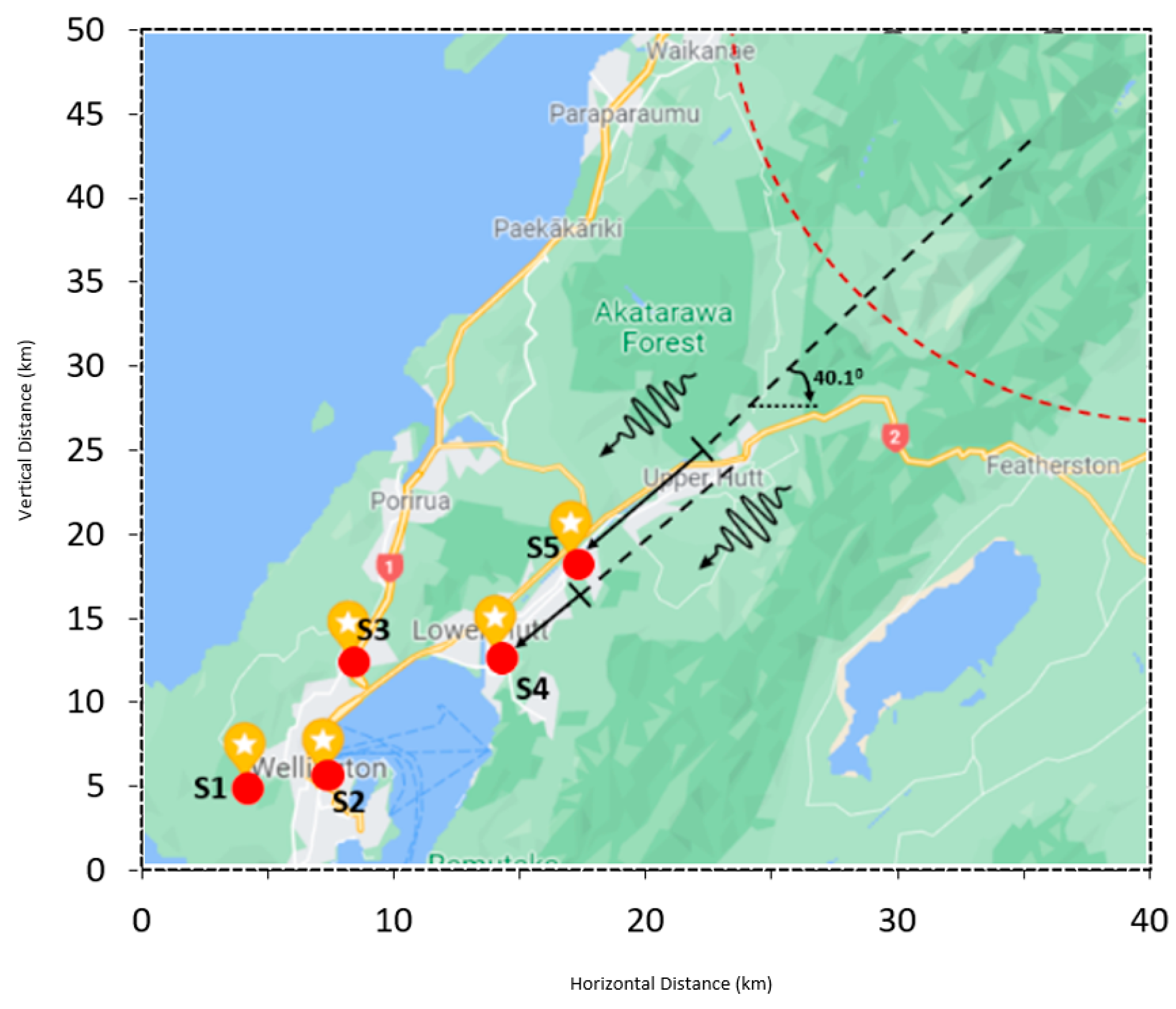
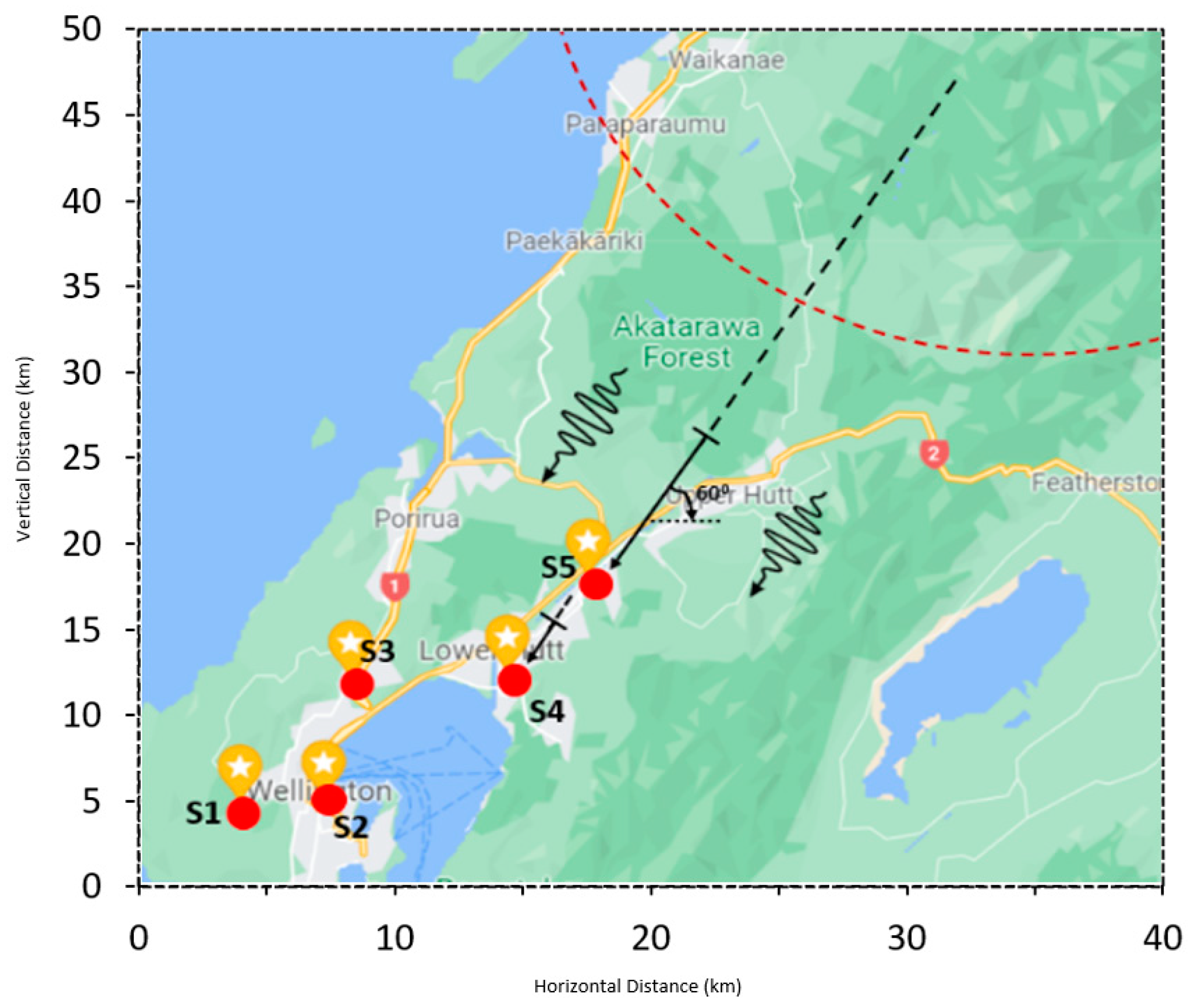
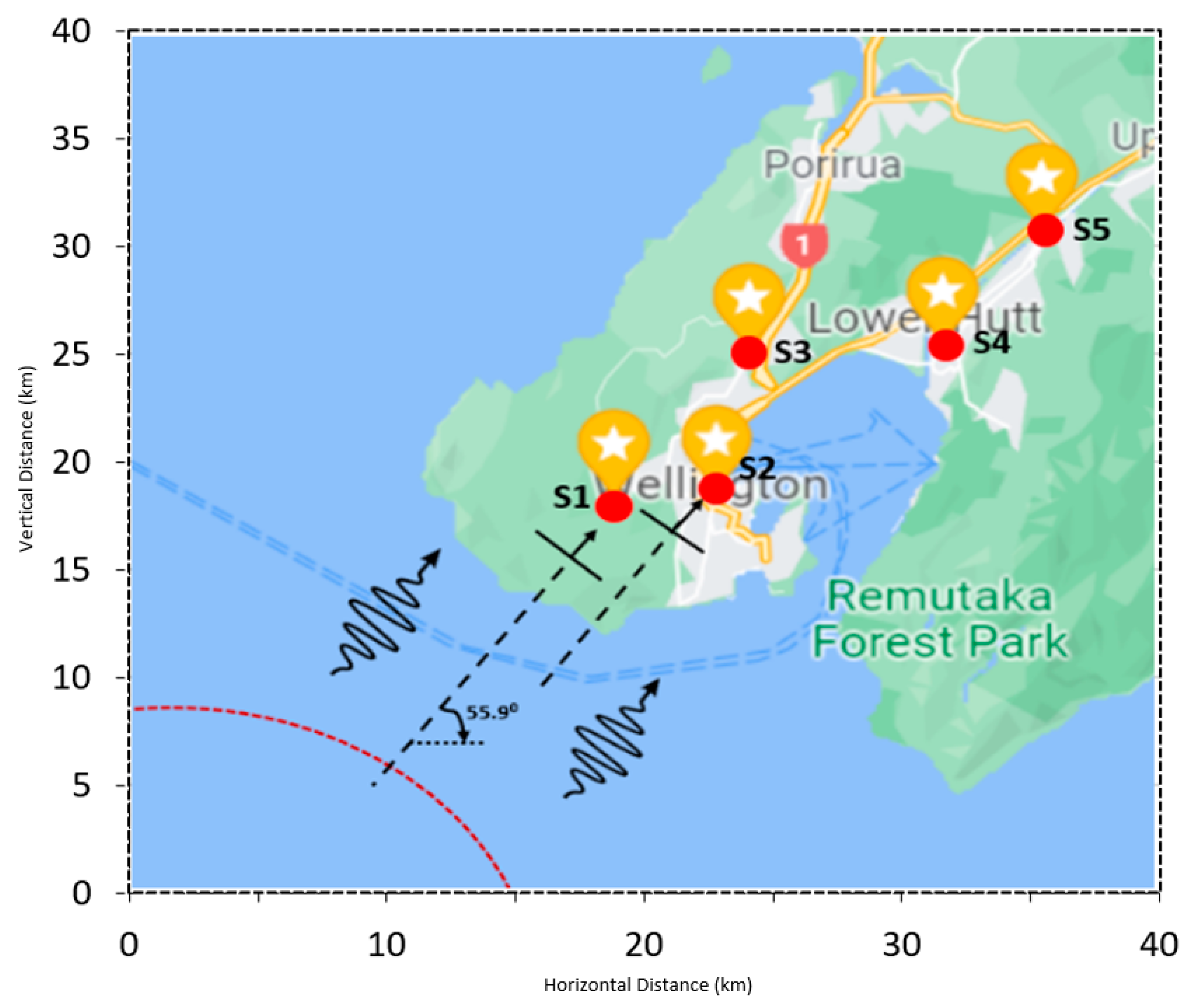
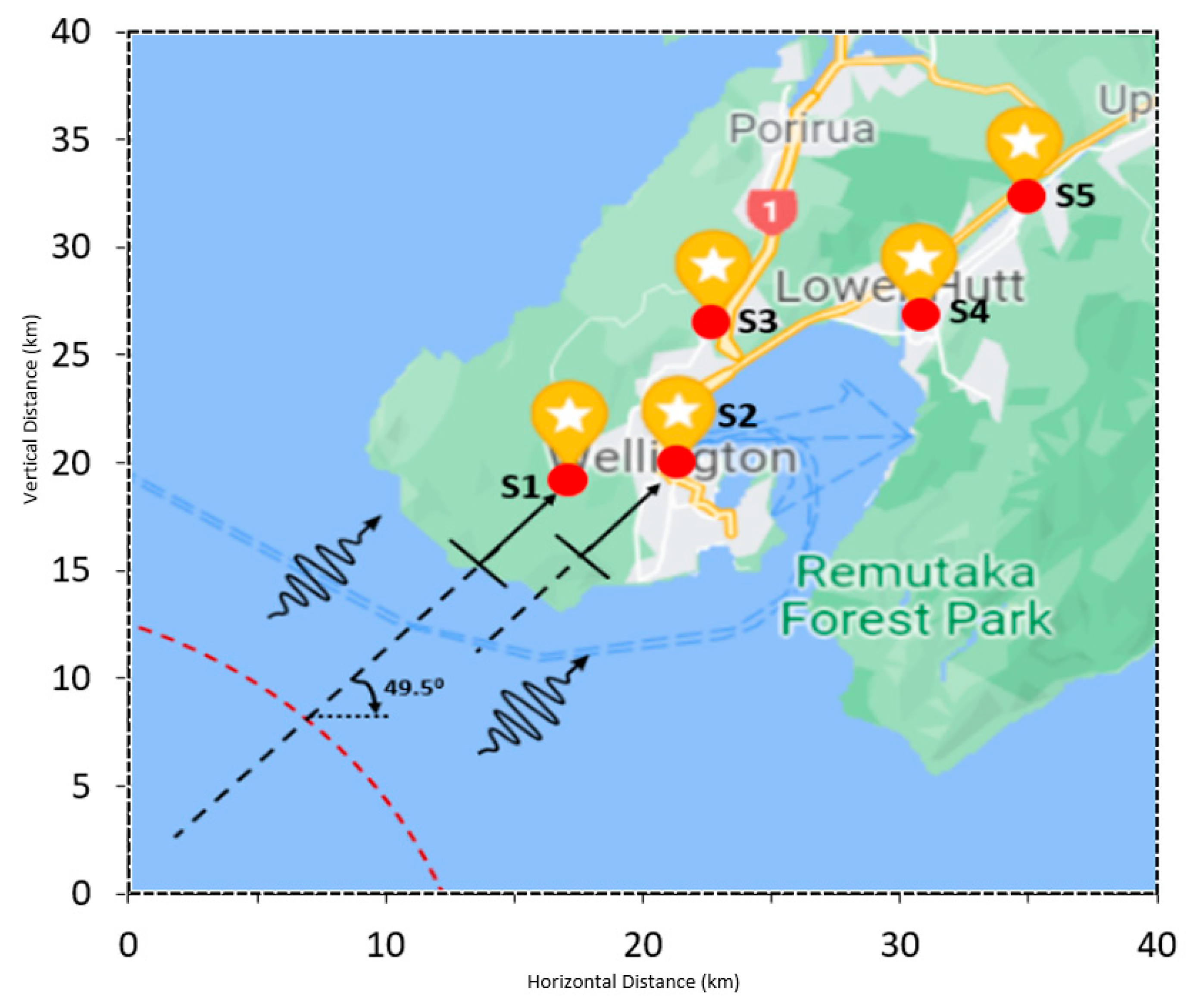
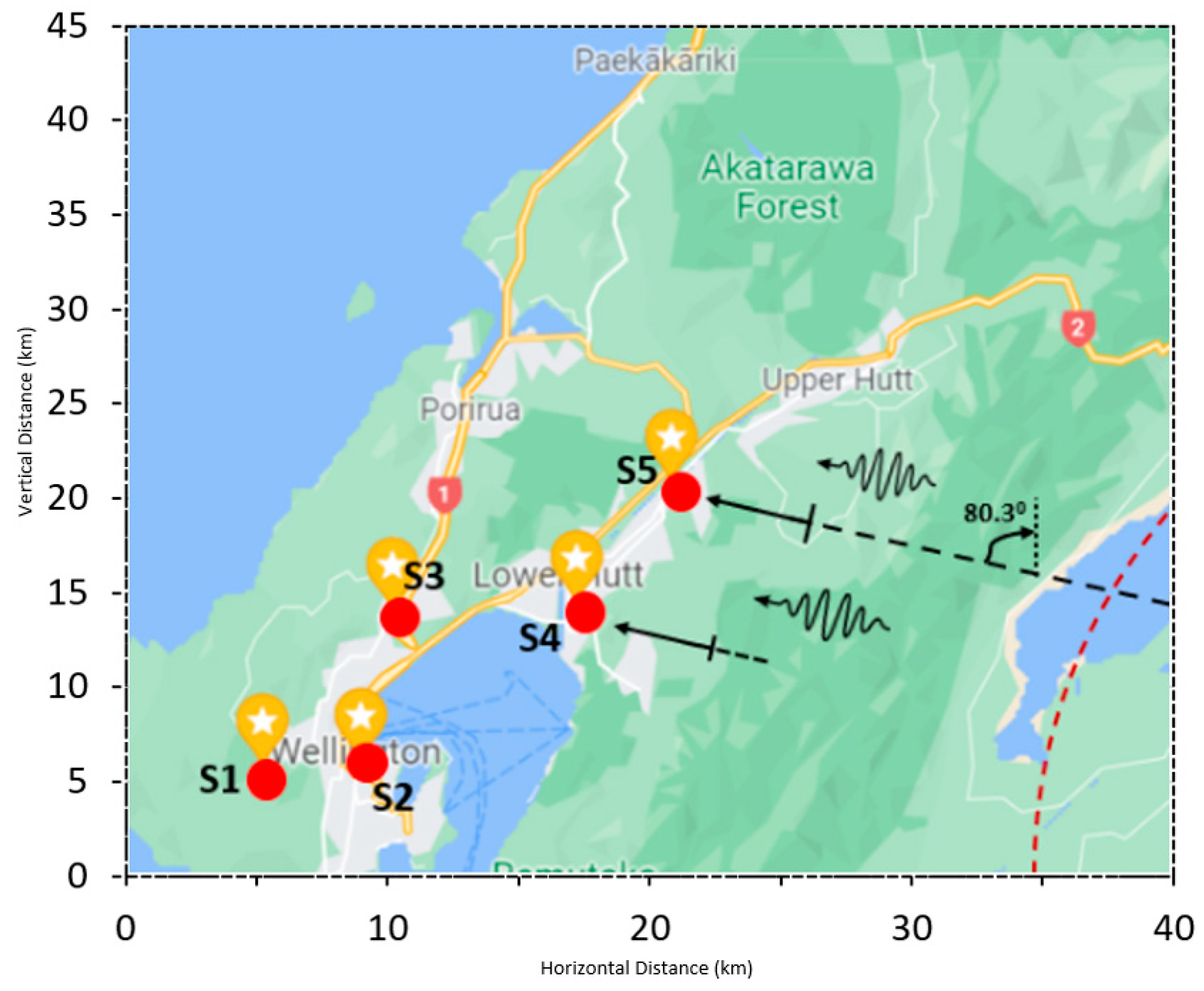
Appendix A. Map Illustration of the Latency Test Scenarios






References
- Strauss, J.A.; Allen, R. Benefits and Costs of Earthquake Early Warning. Seism. Res. Lett. 2016, 87, 765–772. [Google Scholar] [CrossRef] [Green Version]
- Adhikari, M.; Paton, D.; Johnston, D.; Prasanna, R.; McColl, S.T. Modelling predictors of earthquake hazard preparedness in Nepal. Procedia Eng. 2018, 212, 910–917. [Google Scholar] [CrossRef]
- Wu, Y.-M.; Zhao, L. Magnitude estimation using the first three seconds P-wave amplitude in earthquake early warning. Geophys. Res. Lett. 2006, 33, 4–7. [Google Scholar] [CrossRef] [Green Version]
- Nakayachi, K.; Becker, J.S.; Potter, S.H.; Dixon, M. Residents’ Reactions to Earthquake Early Warnings in Japan. Risk Anal. 2019, 39, 1723–1740. [Google Scholar] [CrossRef]
- Becker, J.S.; Potter, S.H.; Vinnell, L.J.; Nakayachi, K.; McBride, S.K.; Johnston, D.M. Earthquake early warning in Aotearoa New Zealand: A survey of public perspectives to guide warning system development. Humanit. Soc. Sci. Commun. 2020, 7, 1–12. [Google Scholar] [CrossRef]
- Becker, J.S.; Potter, S.H.; Prasanna, R.; Tan, M.L.; Payne, B.A.; Holden, C.; Horspool, N.; Smith, R.; Johnston, D.M. Scoping the potential for earthquake early warning in Aotearoa New Zealand: A sectoral analysis of perceived benefits and challenges. Int. J. Disaster Risk Reduct. 2020, 51, 101765. [Google Scholar] [CrossRef]
- Kanamori, H.; Hauksson, E.; Heaton, T. Real-time seismology and earthquake hazard mitigation. Nature 1997, 390, 461–464. [Google Scholar] [CrossRef]
- Wang, Y.; Li, S.; Song, J. Threshold-based evolutionary magnitude estimation for an earthquake early warning system in the Sichuan–Yunnan region, China. Sci. Rep. 2020, 10, 201055. [Google Scholar] [CrossRef]
- Given, D.D.; Cochran, E.S.; Heaton, T.H.; Hauksson, E.; Allen, R.M.; Hellweg, P.; Vidale, J.; Bodin, P. Technical Implementation Plan for the ShakeAlert Production System-An Earthquake Early Warning System for the West Coast of the United States. 2014. Available online: www.scec.org/terashake (accessed on 20 August 2021).
- Teymourian, J.; Moinfar, A.A.; Naderzadeh, A. Strengthening of existing buildings against earthquake with consideration of economic constraints in developing countries. In Proceedings of the 13th World Conference on Earthquake Engineering, Vancouver, BC, Canada, 1–6 August 2004; pp. 1–12. [Google Scholar]
- Allen, R.M.; Melgar, D. Earthquake Early Warning: Advances, Scientific Challenges, and Societal Needs. Annu. Rev. Earth Planet. Sci. 2019, 47, 361–388. [Google Scholar] [CrossRef] [Green Version]
- Peng, C.; Jiang, P.; Chen, Q.; Ma, Q.; Yang, J. Performance Evaluation of a Dense MEMS-Based Seismic Sensor Array Deployed in the Sichuan-Yunnan Border Region for Earthquake Early Warning. Micromachines 2019, 10, 735. [Google Scholar] [CrossRef] [Green Version]
- Nof, R.N.; Chung, A.I.; Rademacher, H.; Dengler, L.; Allen, R.M. MEMS Accelerometer Mini-Array (MAMA): A Low-Cost Implementation for Earthquake Early Warning Enhancement. Earthq. Spectra 2019, 35, 21–38. [Google Scholar] [CrossRef]
- Wu, Y.; Mittal, H.; Huang, T.; Yang, B.M.; Jan, J.; Chen, S.K. Performance of a Low-Cost Earthquake Early Warning System (P-Alert) and Shake Map Production during the 2018 Mw 6.4 Hualien, Taiwan, Earthquake. Seism. Res. Lett. 2019, 90, 19–29. [Google Scholar] [CrossRef]
- Fischer, J.; Redlich, J.-P.; Zschau, J.; Milkereit, C.; Picozzi, M.; Fleming, K.; Brumbulli, M.; Lichtblau, B.; Eveslage, I. A wireless mesh sensing network for early warning. J. Netw. Comput. Appl. 2012, 35, 538–547. [Google Scholar] [CrossRef]
- Aizu, I. The role of ICT during the disaster—A story of how Internet and other information and communication services could or could not help relief operations at the Great East Japan Earthquake. Glob. Inf. Soc. Watch Rep. 2011, 2011, 1–7. [Google Scholar]
- GeoNet. GeoNet Home. Available online: https://www.geonet.org.nz/ (accessed on 20 August 2021).
- Voosen, P. New Google effort uses cellphones to detect earthquakes. Science 2021, 48, 101721. [Google Scholar] [CrossRef]
- McDonald, L. New Google Trial Will Send Earthquake Alerts to Android Phones in New Zealand. Available online: https://www.stuff.co.nz/technology/apps/124969803/new-google-trial-will-send-earthquake-alerts-to-android-phones-in-new-zealand (accessed on 12 November 2021).
- Hoshiba, M.; Iwakiri, K. Initial 30 seconds of the 2011 off the Pacific coast of Tohoku Earthquake (Mw 9.0)—amplitude and τ c for magnitude estimation for Earthquake Early Warning? Earth, Planets Space 2011, 63, 553–557. [Google Scholar] [CrossRef] [Green Version]
- Field, E.H.; Hough, S.E. The Variability of PSV Response Spectra across a Dense Array Deployed during the Northridge Aftershock Sequence. Earthq. Spectra 1997, 13, 243–257. [Google Scholar] [CrossRef]
- Tan, M.L.; Prasanna, R.; Becker, J.; Brown, A.; Stock, K.; Kenney, C.; Lambie, E.; Johnston, D.; De Alwis, D. Outlook for earthquake early warning for Aotearoa New Zealand: Insights from initiating a community-of-practice. In Proceedings of the 2021 Technical Conference for the New Zealand Society for Earthquake Engineering, Christchurch, New Zealand, 14–16 April 2021; pp. 1–8. [Google Scholar]
- Santos, J.; Catapang, A.N.; Reyta, E.D. Understanding the Fundamentals of Earthquake Signal Sensing Networks. AnalogDialogue 2019, 53, 3. [Google Scholar]
- Raspberry Shake. Specifications for: Raspberry Shake RS4D. 2021. Available online: https://manual.raspberryshake.org/_downloads/SpecificationsforRaspberryShake4DMEMSV4.pdf (accessed on 12 November 2021).
- Wu, Y.; Chen, D.-Y.; Lin, T.; Hsieh, C.; Chin, T.; Chang, W.; Li, W.; Ker, S. A High-Density Seismic Network for Earthquake Early Warning in Taiwan Based on Low Cost Sensors. Seism. Res. Lett. 2013, 84, 1048–1054. [Google Scholar] [CrossRef]
- Babatain, W.; Bhattacharjee, S.; Hussain, A.M.; Hussain, M.M. Acceleration Sensors: Sensing Mechanisms, Emerging Fabrication Strategies, Materials, and Applications. ACS Appl. Electron. Mater. 2021, 3, 504–531. [Google Scholar] [CrossRef]
- Cochran, E.S. To catch a quake. Nat. Commun. 2018, 9, 2508. [Google Scholar] [CrossRef] [PubMed]
- Ben, R.A.; Mellouli, S. Smart Cities in the Era of Artificial Intelligence and Internet of Things: Promises and Challenges. Public Adm. Inf. Technol. 2021, 37, 259–288. [Google Scholar]
- Jayawardene, V.; Huggins, T.J.; Prasanna, R.; Fakhruddin, B. The role of data and information quality during disaster response decision-making. Prog. Disaster Sci. 2021, 12, 100202. [Google Scholar] [CrossRef]
- Anthony, R.E.; Ringler, A.T.; Wilson, D.C.; Wolin, E. Do Low-Cost Seismographs Perform Well Enough for Your Network? An Overview of Laboratory Tests and Field Observations of the OSOP Raspberry Shake 4D. Seism. Res. Lett. 2018, 90, 219–228. [Google Scholar] [CrossRef] [Green Version]
- Melgar, D.; Ruiz-Angulo, A.; Pérez-Campos, X.; Crowell, B.W.; Xu, X.; Cabral-Cano, E.; Brudzinski, M.; Rodriguez-Abreu, L. Energetic Rupture and Tsunamigenesis during the 2020 Mw 7.4 La Crucecita, Mexico Earthquake. Seism. Res. Lett. 2021, 92, 140–150. [Google Scholar] [CrossRef]
- Franchi, F.; Graziosi, F.; Marotta, A.; Rinaldi, C. Structural Health Monitoring over 5G uRLLC Network. Lecture Notes in Civil Engineering 2021, 127, 60–68. [Google Scholar]
- Mittal, H.; Wu, Y.-M.; Sharma, M.L.; Yang, B.M.; Gupta, S. Testing the performance of earthquake early warning system in northern India. Acta Geophys. 2018, 67, 59–75. [Google Scholar] [CrossRef]
- Zollo, A.; Colombelli, S.; Elia, L.; Emolo, A.; Festa, G.; Iannaccone, G.; Martino, C.; Gasparini, P. An Integrated Regional and On-Site Earthquake Early Warning System for Southern Italy: Concepts, Methodologies and Performances. In Early Warning for Geological Disasters; Wenzel, F., Zschau, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2014; pp. 117–137. [Google Scholar]
- TurnKey Earthquake Early Warning. 2020. Available online: https://earthquake-turnkey.eu/the-project/ (accessed on 21 November 2021).
- Clayton, R.W.; Heaton, T.; Kohler, M.; Chandy, M.; Guy, R.; Bunn, J. Community Seismic Network: A Dense Array to Sense Earthquake Strong Motion. Seism. Res. Lett. 2015, 86, 1354–1363. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.-M.; Mittal, H. A Review on the Development of Earthquake Warning System Using Low-Cost Sensors in Taiwan. Sensors 2021, 21, 7649. [Google Scholar] [CrossRef]
- Chamoli, B.P.; Kumar, A.; Chen, D.-Y.; Gairola, A.; Jakka, R.S.; Pandey, B.; Kumar, P.; Rathore, G. A Prototype Earthquake Early Warning System for Northern India. J. Earthq. Eng. 2021, 25, 2455–2473. [Google Scholar] [CrossRef]
- Pierleoni, P.; Marzorati, S.; Ladina, C.; Raggiunto, S.; Belli, A.; Palma, L.; Cattaneo, M.; Valenti, S. Performance Evaluation of a Low-Cost Sensing Unit for Seismic Applications: Field Testing During Seismic Events of 2016-2017 in Central Italy. IEEE Sens. J. 2018, 18, 6644–6659. [Google Scholar] [CrossRef]
- Chen, D.-Y.; Hsiao, N.-C.; Wu, Y.-M. The Earthworm Based Earthquake Alarm Reporting System in Taiwan. Bull. Seism. Soc. Am. 2015, 105, 568–579. [Google Scholar] [CrossRef]
- Brooks, B.A.; Protti, M.; Ericksen, T.; Bunn, J.; Vega, F.; Cochran, E.S.; Duncan, C.; Avery, J.; Minson, S.E.; Chaves, E.; et al. Robust Earthquake Early Warning at a Fraction of the Cost: ASTUTI Costa Rica. AGU Adv. 2021, 2, e2021AV000407. [Google Scholar] [CrossRef]
- Zambrano, A.; Perez, I.; Palau, C.; Esteve, M. Quake detection system using smartphone-based wireless sensor network for early warning. In Proceedings of the 2014 IEEE International Conference on Pervasive Computing and Communication Workshops (PERCOM WORKSHOPS), Budapest, Hungary, 24–28 March 2014; pp. 297–302. [Google Scholar] [CrossRef]
- Lee, J.; Kim, J.-S.; Choi, S.; Kwon, Y.-W. A Smart Device Using Low-Cost Sensors to Detect Earthquakes. In Proceedings of the 2019 IEEE International Conference on Big Data and Smart Computing (BigComp), Kyoto, Japan, 27 February–2 March 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Boxberger, T.; Fleming, K.; Pittore, M.; Parolai, S.; Pilz, M.; Mikulla, S. The Multi-Parameter Wireless Sensing System (MPwise): Its Description and Application to Earthquake Risk Mitigation. Sensors 2017, 17, 2400. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fleming, K.; Picozzi, M.; Milkereit, C.; Kuhnlenz, F.; Lichtblau, B.; Fischer, J.; Zulfikar, C.; Ozel, O.; Groups, T.S.A.E.W. The Self-organizing Seismic Early Warning Information Network (SOSEWIN). Seism. Res. Lett. 2009, 80, 755–771. [Google Scholar] [CrossRef]
- Ray, P.P.; Mukherjee, M.; Shu, L. Internet of Things for Disaster Management: State-of-the-Art and Prospects. IEEE Access 2017, 5, 18818–18835. [Google Scholar] [CrossRef] [Green Version]
- Faulkner, M.; Olson, M.; Chandy, R.; Krause, J.; Chandy, K.M.; Krause, A. Demo abstract, the next big one: Detecting earthquakes and other rare events from community-based sensors. In Proceedings of the 10th ACM/IEEE International Conference on Information Processing in Sensor Networks, Chicago, IL, USA, 12–14 April 2011; pp. 121–122. [Google Scholar]
- Mehrazarin, S.; Tang, B.; Leyba, K.; Han, J.; Beheshti, M. A MacBook based earthquake early warning system. In Proceedings of the 2016 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), San Francisco, CA, USA, 10–14 April 2016; 2016, pp. 1029–1030. [Google Scholar] [CrossRef]
- Chung, A.I.; Lawrence, J.F.; Christensen, C. Evaluating the integrability of the quake-catcher network (QCN). In Proceedings of the 10th International Conference on Information Systems for Crisis Response and Management, Baden-Baden, Germany, 12–15 May 2013; pp. 386–390. [Google Scholar]
- Cochran, E.S.; Lawrence, J.F.; Kaiser, A.; Fry, B.; Chung, A.; Christensen, C. Comparison between low-cost and traditional MEMS accelerometers: A case study from the M7.1 Darfield, New Zealand, aftershock deployment. Ann. Geophys. 2012, 54, 728–737. [Google Scholar] [CrossRef]
- Vizuete, A.M.Z.; Llopis, I.P.; Palau, C.; Domingo, M.E. Distributed Sensor System for Earthquake Early Warning Based on the Massive Use of Low Cost Accelerometers. IEEE Lat. Am. Trans. 2015, 13, 291–298. [Google Scholar] [CrossRef]
- Minson, S.E.; Brooks, B.A.; Glennie, C.L.; Murray, J.R.; Langbein, J.O.; Owen, S.E.; Heaton, T.H.; Iannucci, R.A.; Hauser, D.L. Crowdsourced earthquake early warning. Sci. Adv. 2015, 1, e1500036. [Google Scholar] [CrossRef] [Green Version]
- Allen, R.M.; Kong, Q.; Martin-Short, R. The MyShake Platform: A Global Vision for Earthquake Early Warning. Pure Appl. Geophys. 2020, 177, 1699–1712. [Google Scholar] [CrossRef] [Green Version]
- Panizzi, E. The SeismoCloud App: Your smartphone as a seismometer. In Proceedings of the Workshop on Advanced Visual Interfaces AVI, Bari, Italy, 7–10 June 2016; pp. 336–337. [Google Scholar] [CrossRef]
- Anderson, R. Early Warning for Geological Disasters: Scientific Methods and Current Practice. Environ. Eng. Geosci. 2014, 20, 404. [Google Scholar] [CrossRef]
- Lee, J.; Khan, I.; Choi, S.; Kwon, Y.-W. A Smart IoT Device for Detecting and Responding to Earthquakes. Electronics 2019, 8, 1546. [Google Scholar] [CrossRef] [Green Version]
- Firouzi, F.; Farahani, B.; Marinšek, A. The convergence and interplay of edge, fog, and cloud in the AI-driven Internet of Things (IoT). Inf. Syst. 2021, 101840. [Google Scholar] [CrossRef]
- Santamaria, A.F.; Raimondo, P.; Tropea, M.; De Rango, F.; Aiello, C. An IoT Surveillance System Based on a Decentralised Architecture. Sensors 2019, 19, 1469. [Google Scholar] [CrossRef] [Green Version]
- Böse, M.; Allen, R.; Brown, H.; Gua, G.; Fischer, M.; Hauksson, E.; Heaten, T.; Hellweg, M.; Liukis, M.; Neuhauser, D.; et al. CISN ShakeAlert: An Earthquake Early Warning Demonstration System for California. In Early Warning for Geological Disasters; Wenzel, F., Zschau J, Eds.; Springer: Berlin/Heidelberg, Germany, 2014; pp. 49–69. [Google Scholar]
- Kobayashi, M. Experience of infrastructure damage caused by the Great East Japan Earthquake and countermeasures against future disasters. IEEE Commun. Mag. 2014, 52, 23–29. [Google Scholar] [CrossRef]
- Prasanna, R.; Yang, L.; King, M.; Huggins, T.J. Information systems architecture for fire emergency response. J. Enterp. 2017, 30, 605–624. [Google Scholar] [CrossRef] [Green Version]
- Lewis, M. Comparing, Designing, and Deploying VPNs (Networking Technology); Cisco Press: Indianapolis, IN, USA, 2006. [Google Scholar]
- Hauser, F.; Haberle, M.; Schmidt, M.; Menth, M. P4-IPsec: Site-to-Site and Host-to-Site VPN With IPsec in P4-Based SDN. IEEE Access 2020, 8, 139567–139586. [Google Scholar] [CrossRef]
- Sadasivam, S. Multiprotocol Label Switching (MPLS). Available online: https://medium.com/@senthilsivam/mpls-39f3f0a778aa (accessed on 25 June 2021).
- Rafique, W.; Qi, L.; Yaqoob, I.; Imran, M.; Rasool, R.U.; Dou, W. Complementing IoT Services Through Software Defined Networking and Edge Computing: A Comprehensive Survey. IEEE Commun. Surv. Tutorials 2020, 22, 1761–1804. [Google Scholar] [CrossRef]
- Gabriel, D.; Barmettler, L. SD-WAN Topology Viewer. Term Project. Ph.D. Thesis, Eastern Switzerland University of Applied Sciences, St. Gallen, Switzerland, 18 December 2020. [Google Scholar]
- Ford, B.; Srisuresh, P.; Kegel, D. Peer-to-peer communication across network address translators. In Proceedings of the USENIX Annual Technical Conference, Anaheim, CA, USA, 10–15 April 2005; pp. 179–192. [Google Scholar]
- Goethals, T.; Kerkhove, D.; Volckaert, B.; De Turck, F. Scalability evaluation of VPN technologies for secure container networking. In Proceedings of the 15th International Conference on Network and Service Management (CNSM), Halifax, NS, Canada, 21–25 October 2019. [Google Scholar] [CrossRef] [Green Version]
- Ierymenko, A.; Limberg, G.; Henry, J. Protocol design whitepaper: ZeroTier documentation. Available online: https://docs.zerotier.com/zerotier/manual/ (accessed on 18 December 2021).
- Damiano, L. CSI Home Page: General. Available online: https://www.csi.net.nz/ (accessed on 20 June 2021).
- Kodera, Y.; Yamada, Y.; Hirano, K.; Tamaribuchi, K.; Adachi, S.; Hayashimoto, N.; Morimoto, M.; Nakamura, M.; Hoshiba, M. The Propagation of Local Undamped Motion (PLUM) Method: A Simple and Robust Seismic Wavefield Estimation Approach for Earthquake Early Warning. Bull. Seism. Soc. Am. 2018, 108, 983–1003. [Google Scholar] [CrossRef]
- Wu, Y.-M. Rapid Assessment of Damage Potential of Earthquakes in Taiwan from the Beginning of P Waves. Bull. Seism. Soc. Am. 2005, 95, 1181–1185. [Google Scholar] [CrossRef] [Green Version]
- Hoshiba, M.; Iwakiri, K.; Hayashimoto, N.; Shimoyama, T.; Hirano, K.; Yamada, Y.; Ishigaki, Y.; Kikuta, H. Outline of the 2011 off the Pacific coast of Tohoku Earthquake (Mw 9.0)—Earthquake Early Warning and observed seismic intensity? Earth, Planets Space 2011, 63, 547–551. [Google Scholar] [CrossRef] [Green Version]
- Cochran, E.S.; Bunn, J.; Minson, S.E.; Baltay, A.S.; Kilb, D.; Kodera, Y.; Hoshiba, M. Event Detection Performance of the PLUM Earthquake Early Warning Algorithm in Southern California. Bull. Seism. Soc. Am. 2019, 109, 1524–1541. [Google Scholar] [CrossRef]
- Denis, M.; Zena, C.; Hayajneh, T. Penetration testing: Concepts, attack methods, and defense strategies. In Proceedings of the 2016 IEEE Long Island Systems, Applications and Technology Conference (LISAT), Farmingdale, NY, USA, 29 April 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Cao, P.M.; Wu, Y.; Banerjee, S.S.; Azoff, J.; Withers, A.; Kalbarczyk, Z.T.; Iyer, R.K. Caudit: Continuous auditing of SSH servers to mitigate brute-force attacks. In Proceedings of the 16th USENIX Conference on Networked Systems Design and Implementation, Boston, MA, USA, 26–28 February 2019; pp. 667–682. [Google Scholar]
- Provos, N.; Honeyman, P. ScanSSH—Scanning the internet for SSH servers. In Proceedings of the LISA 15th Systems Administration Conference, San Diego, CA, USA, 2–7 December 2001; pp. 25–30. [Google Scholar]
- Ndichu, S.; McOyowo, S.; Okoyo, H.; Wekesa, C. A Remote Access Security Model based on Vulnerability Management. Int. J. Inf. Technol. Comput. Sci. 2020, 12, 38–51. [Google Scholar] [CrossRef]
- Rayarapu, A.; Krishna, N.V.; Mundhra, D. Securing Files Using AES Algorithm. Int. J. Comput. Sci. Inf. Technol. 2013, 4, 433–435. [Google Scholar]
- Wang, Y.; Yang, J. Ethical Hacking and Network Defense: Choose Your Best Network Vulnerability Scanning Tool. In Proceedings of the 2017 31st International Conference on Advanced Information Networking and Applications Workshops (WAINA), Taipei, Taiwan, 27–29 March 2017; pp. 110–113. [Google Scholar] [CrossRef]
- Wack, J.P.; Tracy, M.C.; Souppaya, M.P. Guideline on network security testing. In Guideline on Network Security Testing; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2003. [Google Scholar] [CrossRef]
- Kilb, D.; Bunn, J.J.; Saunders, J.K.; Cochran, E.S.; Minson, S.E.; Baltay, A.; O’Rourke, C.T.; Hoshiba, M.; Kodera, Y. The PLUM Earthquake Early Warning Algorithm: A Retrospective Case Study of West Coast, USA, Data. J. Geophys. Res. Solid Earth 2021, 126, e2020JB021053. [Google Scholar] [CrossRef]
- Firdous, S.N.; Baig, Z.; Valli, C.; Ibrahim, A. Modelling and Evaluation of Malicious Attacks against the IoT MQTT Protocol. In Proceedings of the 2017 IEEE International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Exeter, UK, 21–23 June 2017; pp. 748–755. [Google Scholar] [CrossRef]
- Yassein, M.B.; Shatnawi, M.Q.; Aljwarneh, S.; Al-Hatmi, R. Internet of Things: Survey and open issues of MQTT protocol. In Proceedings of the 2017 International Conference on Engineering & MIS (ICEMIS), Monastir, Tunisia, 8–10 May 2017. [Google Scholar] [CrossRef]
- Kumar, S.; Rai, S. Survey on Transport Layer Protocols: TCP & UDP. Int. J. Comput. Appl. 2012, 46, 7. [Google Scholar]
- Sadeq, A.S.; Hassan, R.; Al-Rawi, S.S.; Jubair, A.M.; Aman, A.H.M. A Qos Approach For Internet Of Things (Iot) Environment Using Mqtt Protocol. In Proceedings of the 2019 International Conference on Cybersecurity (ICoCSec), Negeri Sembilan, Malaysia, 25–26 September 2019; pp. 59–63. [Google Scholar] [CrossRef]
- Bossu, R.; Finazzi, F.; Steed, R.; Fallou, L.; Bondár, I. Shaking in 5 seconds!’ A Voluntary Smartphone-based Earthquake Early Warning System. Seismol. Soc. Am. 2022, 93, 137–148. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hypothetical Scenarios * | Decentralised Processing Using TCP (in Seconds) | |||
|---|---|---|---|---|
| δtdetect | δttransmission | δts-wave_travel | δtsys_latency | |
| Scenario 1 | 0.10 | 0.05 | 2.50 | 2.65 |
| Scenario 2 | 0.13 | 0.05 | 2.70 | 2.88 |
| Scenario 3 | 0.19 | 0.05 | 1.00 | 1.24 |
| Scenario 4 | 0.17 | 0.05 | 1.20 | 1.42 |
| Scenario 5 | 0.17 | 0.05 | 1.10 | 1.32 |
| Scenario 6 | 0.19 | 0.05 | 1.60 | 1.84 |
| Hypothetical Scenarios | System Latency for Centralised Processing (in Seconds) | System Latency for Decentralised Processing Using TCP (in Seconds) | |
|---|---|---|---|
| MQTT | TCP | ||
| Scenario 1 | 4.15 | 2.94 | 2.65 |
| Scenario 2 | 4.57 | 3.13 | 2.88 |
| Scenario 3 | 3.24 | 1.48 | 1.24 |
| Scenario 4 | 3.51 | 1.69 | 1.42 |
| Scenario 5 | 3.32 | 1.64 | 1.32 |
| Scenario 6 | 3.84 | 2.08 | 1.84 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prasanna, R.; Chandrakumar, C.; Nandana, R.; Holden, C.; Punchihewa, A.; Becker, J.S.; Jeong, S.; Liyanage, N.; Ravishan, D.; Sampath, R.; et al. “Saving Precious Seconds”—A Novel Approach to Implementing a Low-Cost Earthquake Early Warning System with Node-Level Detection and Alert Generation. Informatics 2022, 9, 25. https://0-doi-org.brum.beds.ac.uk/10.3390/informatics9010025
Prasanna R, Chandrakumar C, Nandana R, Holden C, Punchihewa A, Becker JS, Jeong S, Liyanage N, Ravishan D, Sampath R, et al. “Saving Precious Seconds”—A Novel Approach to Implementing a Low-Cost Earthquake Early Warning System with Node-Level Detection and Alert Generation. Informatics. 2022; 9(1):25. https://0-doi-org.brum.beds.ac.uk/10.3390/informatics9010025
Chicago/Turabian StylePrasanna, Raj, Chanthujan Chandrakumar, Rasika Nandana, Caroline Holden, Amal Punchihewa, Julia S. Becker, Seokho Jeong, Nandika Liyanage, Danuka Ravishan, Rangana Sampath, and et al. 2022. "“Saving Precious Seconds”—A Novel Approach to Implementing a Low-Cost Earthquake Early Warning System with Node-Level Detection and Alert Generation" Informatics 9, no. 1: 25. https://0-doi-org.brum.beds.ac.uk/10.3390/informatics9010025