
Digital Twins for Wind Energy Conversion Systems: A Literature Review of Potential Modelling Techniques Focused on Model Fidelity and Computational Load

 ,
,  , and
, and 
Abstract
:1. Introduction
2. Definition of a Digital Twin
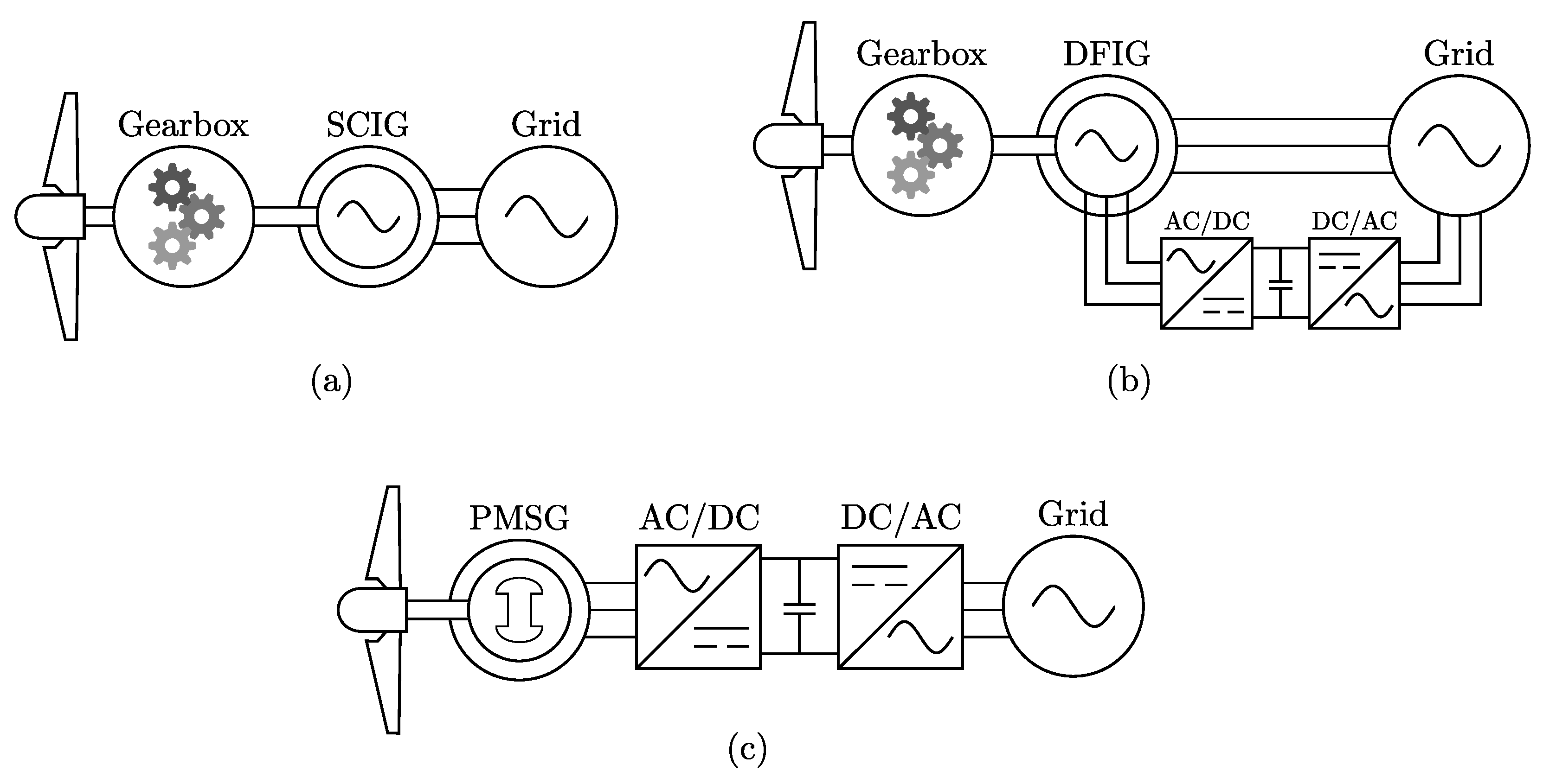
3. Modelling Techniques for Direct-Drive Wind Turbine Components
3.1. Turbine Aerodynamics
3.2. Structure and Drivetrain Mechanics
3.3. Permanent Magnet Synchronous Generator
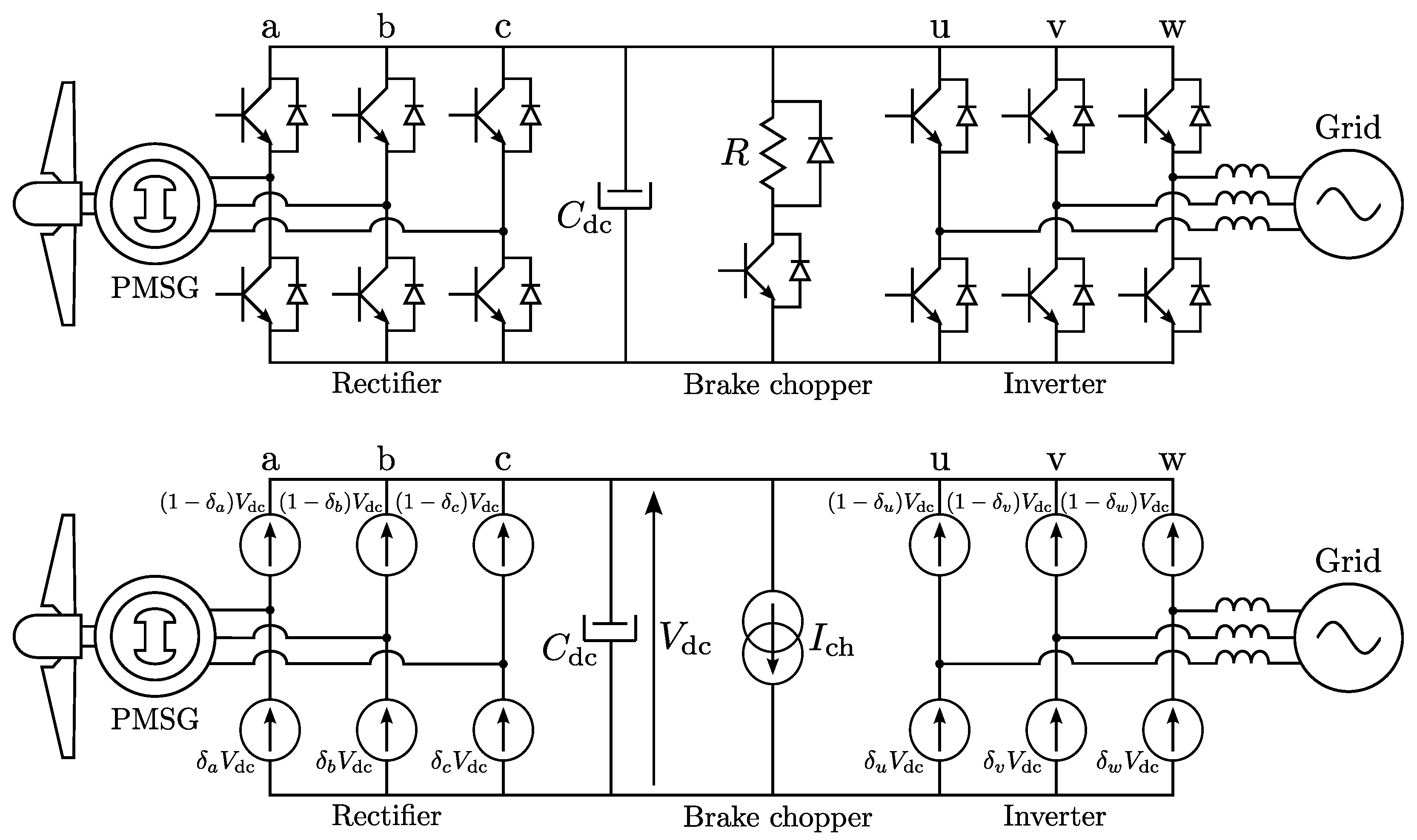
3.4. Power Electronic Converter
3.5. Pitch and Yaw Systems
4. Virtual Replica and Digital Twin of a Direct Drive Wind Turbine
4.1. Digital Twin Architecture
4.2. Graphical Overview of the Literature Study for Model Selection
4.3. Virtual Replica
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Global Wind Energy Council. In Proceedings of the Global Wind Report 2021, 16th Annual Report. 2021. [Google Scholar]
- Global Wind Energy Council. In Proceedings of the Global Offshore Wind Report 2020. 2020. [Google Scholar]
- Lazard’s Levelized Cost of Energy Analysis—Version 14.0. Lazard 2020.
- International Renewable Energy Agency (IRENA). Renewable Power Generation Costs in 2020; IRENA: Abu Dhabi, United Arab Emirates, 2021. [Google Scholar]
- Rahimi, M.; Parniani, M. Dynamic behavior and transient stability analysis of fixed speed wind turbines. Renew. Energy 2009, 34, 2613–2624. [Google Scholar] [CrossRef]
- Yang, R.H.; Jin, J.X. Unified Power Quality Conditioner with Advanced Dual Control for Performance Improvement of DFIG-Based Wind Farm. IEEE Trans. Sustain. Energy 2021, 12, 116–126. [Google Scholar] [CrossRef]
- Brando, G.; Dannier, A.; Spina, I. Performance Analysis of a Full Order Sensorless Control Adaptive Observer for Doubly-Fed Induction Generator in Grid Connected Operation. Energies 2021, 14, 1254. [Google Scholar] [CrossRef]
- De Kooning, J.D.M.; Vandoorn, T.L.; Van de Vyver, J.; Meersman, B.; Vandevelde, L. Displacement of the maximum power point caused by losses in wind turbine systems. Renew. Energy 2016, 85, 273–280. [Google Scholar] [CrossRef]
- Pan, L.; Wang, X. Variable pitch control on direct-driven PMSG for offshore wind turbine using Repetitive-TS fuzzy PID control. Renew. Energy 2020, 159, 221–237. [Google Scholar] [CrossRef]
- Ju, S.-H.; Juang, Y.-C.; Huang, Y.-Y. Study of Optimal Large-Scale Offshore Wind Turbines. Renew. Energy 2020, 154, 161–174. [Google Scholar] [CrossRef]
- Ramírez-Durán, V.J.; Berges, I.; Illarramendi, A. Towards the implementation of Industry 4.0: A methodology-based approach oriented to the customer life cycle. Comput. Ind. 2021, 126, 103403. [Google Scholar] [CrossRef]
- Malik, P.K.; Sharma, R.; Singh, R.; Gehlot, A.; Satapathy, S.C.; Alnumay, W.S.; Pelusi, D.; Ghosh, U.; Nayak, J. Industrial Internet of Things and its Applications in Industry 4.0: State of The Art. Comput. Commun. 2021, 166, 125–139. [Google Scholar] [CrossRef]
- Peres, R.S.; Jia, X.; Lee, J.; Sun, K.; Colombo, A.W.; Barata, J. Industrial Artificial Intelligence in Industry 4.0—Systematic Review, Challenges and Outlook. IEEE Access 2020, 8, 220121–220139. [Google Scholar] [CrossRef]
- Trakadas, P.; Simoens, P.; Gkonis, P.; Sarakis, L.; Angelopoulos, A.; Ramallo-Gonzalez, A.P.; Skarmeta, A.; Trochoutsos, C.; Calvo, D.; Pariente, T.; et al. An Artificial Intelligence-Based Collaboration Approach in Industrial IoT Manufacturing: Key Concepts, Architectural Extensions and Potential Applications. Sensors 2020, 20, 5480. [Google Scholar] [CrossRef]
- Sahal, R.; Breslin, J.G.; Ali, M.I. Big data and stream processing platforms for Industry 4.0 requirements mapping for a predictive maintenance use case. J. Manuf. Syst. 2020, 54, 138–151. [Google Scholar] [CrossRef]
- Pargmann, H.; Euhausen, D.; Faber, R. Intelligent big data processing for wind farm monitoring and analysis based on cloud-technologies and digital twins: A quantitative approach. In Proceedings of the IEEE 3rd International Conference on Cloud Computing and Big Data Analysis (ICCCBDA), Chengdu, China, 20–22 April 2018. [Google Scholar]
- Dinardo, G.; Fabbiano, L.; Vacca, G. A smart and intuitive machine condition monitoring in the Industry 4.0 scenario. Measurement 2018, 126, 1–12. [Google Scholar] [CrossRef]
- Di Bona, G.; Cesarotti, V.; Arcese, G.; Gallo, T. Implementation of Industry 4.0 technology: New opportunities and challenges for maintenance strategy. Procedia Comput. Sci. 2021, 180, 424–429. [Google Scholar] [CrossRef]
- Rolo, G.R.; Rocha, A.D.; Tripa, J.; Barata, J. Application of a Simulation-Based Digital Twin for Predicting Distributed Manufacturing Control System Performance. Appl. Sci. 2021, 11, 2202. [Google Scholar] [CrossRef]
- VanDerHorn, E.; Mahadevan, S. Digital Twin: Generalization, characterization and implementation. Decis. Support Syst. 2021, 145, 113524. [Google Scholar] [CrossRef]
- Ruppert, T.; Abonyi, J. Integration of Real-Time Locating Systems into Digital Twins. J. Ind. Inf. Integr. 2020, 20, 1–12. [Google Scholar] [CrossRef]
- Ladj, A.; Wang, Z.; Meski, O.; Belkadi, F.; Ritou, M.; Da Cunha, C. A knowledge-based Digital Shadow for machining industry in a Digital Twin perspective. J. Manuf. Syst. 2021, 58, 168–179. [Google Scholar] [CrossRef]
- Chen, J.; Hu, P.; Zhou, H.; Yang, J.; Xie, J.; Jiang, Y.; Gao, Z.; Zhang, C. Toward Intelligent Machine Tool. Engineering 2019, 5, 679–690. [Google Scholar] [CrossRef]
- Rasheed, A.; San, O.; Kvamsdal, T. Digital Twin: Values, Challenges and Enablers From a Modeling Perspective. IEEE Access 2020, 8, 21980–22012. [Google Scholar] [CrossRef]
- Gao, Z.; Paul, A.; Wang, X. Guest Editorial: Digital Twinning: Integrating AI-ML and Big Data Analytics for Virtual Representation. IEEE Trans. Ind. Inform. 2021, 18, 1355–1358. [Google Scholar] [CrossRef]
- Solman, H.; Kirkegaard, J.K.; Smits, M.; Vliet, B.V.; Bush, S. Digital twinning as an act of governance in the wind energy sector. Environ. Sci. Policy 2022, 127, 272–279. [Google Scholar] [CrossRef]
- Schluse, M.; Priggemeyer, M.; Atorf, L.; Rossmann, J. Experimentable Digital Twins—Streamlining Simulation-Based Systems Engineering for Industry 4.0. IEEE Trans. Ind. Inform. 2018, 14, 1722–1731. [Google Scholar] [CrossRef]
- Huang, H.; Yang, L.; Wang, Y.; Xu, X.; Lu, Y. Digital twin-driven online anomaly detection for an automation system based on edge intelligence. J. Manuf. Syst. 2021, 59, 138–150. [Google Scholar] [CrossRef]
- Castellani, A.; Schmitt, S.; Squartini, S. Real-World Anomaly Detection by Digital Twin Systems and Weakly Supervised Learning. IEEE Trans. Ind. Inform. 2021, 17, 4733–4742. [Google Scholar] [CrossRef]
- Aheleroff, S.; Xu, X.; Zhong, R.Y.; Lu, Y. Digital Twin as a Service (DTaaS) in Industry 4.0: An Architecture Reference Model. Adv. Eng. Inform. 2021, 47, 101225. [Google Scholar] [CrossRef]
- Fan, Y.; Yang, J.; Chen, J.; Hu, P.; Wang, X.; Xi, J.; Zhou, B. A digital-twin visualized architecture for flexible manufacturing system. J. Manuf. Syst. 2021, 60, 176–201. [Google Scholar] [CrossRef]
- Guo, J.; Zhao, N.; Sun, L.; Zhang, S. Modular based flexible digital twin for factory design. J. Ambient Intell. Humaniz. Comput. 2019, 10, 1189–1200. [Google Scholar] [CrossRef]
- Soltani, M.N.; Knudsen, T.; Svenstrup, M.; Wisniewski, R.; Brath, P.; Ortega, R.; Johnson, K. Estimation of Rotor Effective Wind Speed: A Comparison. IEEE Trans. Control Syst. Technol. 2013, 21, 1155–1167. [Google Scholar] [CrossRef]
- Wan, S.; Cheng, L.; Sheng, X. Effects of Yaw Error on Wind Turbine Running Characteristics Based on the Equivalent Wind Speed Model. Energies 2015, 8, 6286–6301. [Google Scholar] [CrossRef]
- Sang, L.Q.; Li, Q.; Cai, C.; Maeda, T.; Kamada, Y.; Wang, X.; Zhou, S.; Zhang, F. Wind tunnel and numerical study of a floating offshore wind turbine based on the cyclic pitch control. Renew. Energy 2021, 172, 453–464. [Google Scholar] [CrossRef]
- Khanjari, A.; Mahmoodi, E.; Ahmadi, M.H. Energy and exergy analyzing of a wind turbine in free stream and wind tunnel in CFD domain based on actuator disc technique. Renew. Energy 2020, 160, 231–249. [Google Scholar] [CrossRef]
- Samani, A.E.; Kooning, J.D.M.D.; Kayedpour, N.; Singh, N.; Vandevelde, L. The Impact of Pitch-To-Stall and Pitch-To-Feather Control on the Structural Loads and the Pitch Mechanism of a Wind Turbine. Energies 2020, 13, 4503. [Google Scholar] [CrossRef]
- Yang, Z.; Yin, M.; Xu, Y.; Zou, Y.; Dong, Z.Y.; Zhou, Q. Inverse Aerodynamic Optimization Considering Impacts of Design Tip Speed Ratio for Variable-Speed Wind Turbines. Energies 2016, 9, 1023. [Google Scholar] [CrossRef] [Green Version]
- Perea-Moreno, A.; Alcalá, G.; Hernandez-Escobedo, Q. Seasonal Wind Energy Characterization in the Gulf of Mexico. Energies 2019, 13, 93. [Google Scholar] [CrossRef] [Green Version]
- Ulazia, A.; Ibarra-Berastegi, G.; Sáenz, J.; Carreno-Madinabeitia, S.; González-Rojí, S.J. Seasonal Correction of Offshore Wind Energy Potential due to Air Density: Case of the Iberian Peninsula. Sustainability 2019, 11, 3648. [Google Scholar] [CrossRef] [Green Version]
- Jung, C.; Schindler, D. The role of air density in wind energy assessment – A case study from Germany. Energy 2019, 171, 385–392. [Google Scholar] [CrossRef]
- Liang, Y.; Ji, X.; Wu, C.; He, J.; Qin, Z. Estimation of the influences of air density on wind energy assessment: A case study from China. Energy Convers. Manag. 2020, 224, 113371. [Google Scholar] [CrossRef]
- Rocha, I.B.C.M.; Raijmaekers, S.; Nijssen, R.P.L.; Meer, F.P.v.; Sluys, L.J. Hygrothermal ageing behaviour of a glass/epoxy composite used in wind turbine blades. Compos. Struct. 2017, 175, 110–122. [Google Scholar] [CrossRef] [Green Version]
- Dai, J.; Yang, W.; Cao, J.; Liu, D.; Long, X. Ageing assessment of a wind turbine over time by interpreting wind farm SCADA data. Renew. Energy 2018, 116, 199–208. [Google Scholar] [CrossRef] [Green Version]
- Mishnaevsky, L., Jr.; Hasager, C.B.; Bak, C.; Tilg, A.-M.; Bech, J.I.; Rad, S.D.; Fæster, S. Leading edge erosion of wind turbine blades: Understanding, prevention and protection. Renew. Energy 2021, 169, 953–969. [Google Scholar] [CrossRef]
- Hu, W.; Chen, W.; Wang, X.; Jiang, Z.; Wang, Y.; Verma, A.S.; Teuwen, J.J.E. A computational framework for coating fatigue analysis of wind turbine blades due to rain erosion. Renew. Energy 2021, 170, 236–250. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, X. Design Research and Experimental Verification of the Electro-Impulse De-Icing System for Wind Turbine Blades in the Xuefeng Mountain Natural Icing Station. IEEE Access 2020, 8, 28915–28924. [Google Scholar] [CrossRef]
- Yang, X.; Ye, T.; Wang, Q.; Tao, Z. Diagnosis of Blade Icing Using Multiple Intelligent Algorithms. Energies 2020, 13, 2975. [Google Scholar] [CrossRef]
- Kreutz, M.; Alla, A.A.; Eisenstadt, A.; Freitag, M.; Thoban, K.-D. Ice Detection on Rotor Blades of Wind Turbines using RGB Images and Convolutional Neural Networks. Procedia CIRP 2020, 93, 1292–1297. [Google Scholar] [CrossRef]
- Madi, E.; Pope, K.; Huang, W.; Iqbal, T. A review of integrating ice detection and mitigation for wind turbine blades. Renew. Sustain. Energy Rev. 2019, 103, 269–281. [Google Scholar] [CrossRef]
- Jin, J.Y.; Virk, M.S.; Hu, Q.; Jiang, X. Study of Ice Accretion on Horizontal Axis Wind Turbine Blade Using 2D and 3D Numerical Approach. IEEE Access 2020, 8, 166236–166245. [Google Scholar] [CrossRef]
- Noyes, C.; Qin, C.; Loth, E.; Schreck, S. Measurements and predictions of wind turbine tower shadow and fairing effects. J. Wind Eng. Ind. Aerodyn. 2018, 179, 297–307. [Google Scholar] [CrossRef]
- Liu, Y.; Qiao, Y.; Han, S.; Tao, T.; Yan, J.; Li, L.; Bekhbat, G.; Munkhtuya, E. Rotor equivalent wind speed calculation method based on equivalent power considering wind shear and tower shadow. Renew. Energy 2021, 172, 882–896. [Google Scholar] [CrossRef]
- Dolan, D.S.L.; Lehn, P.W. Simulation model of wind turbine 3p torque oscillations due to wind shear and tower shadow. IEEE Trans. Energy Convers. 2006, 21, 717–724. [Google Scholar] [CrossRef]
- Kooning, J.D.M.D.; Vandoorn, T.L.; de Vyver, J.V.; Meersman, B.; Vandevelde, L. Shaft speed ripples in wind turbines caused by tower shadow and wind shear. IET Renew. Power Gener. 2014, 8, 195–202. [Google Scholar] [CrossRef]
- Abo-Khalil, A.G.; Alyami, S.; Sayed, K.; Alhejji, A. Dynamic Modeling of Wind Turbines Based on Estimated Wind Speed under Turbulent Conditions. Energies 2019, 12, 1907. [Google Scholar] [CrossRef] [Green Version]
- Glauert, H. Airplane propellers. In Aerodynamic Theory, 4th ed.; Durand, W.F., Ed.; Springer: Berlin, Germany, 1935; pp. 169–360. [Google Scholar]
- Zhu, J.; Zhou, Z.; Cai, X. Multi-objective aerodynamic and structural integrated optimization design of wind turbines at the system level through a coupled blade-tower model. Renew. Energy 2020, 150, 523–537. [Google Scholar] [CrossRef]
- Hjort, S. Non-Empirical BEM Corrections Relating to Angular and Axial Momentum Conservation. Energies 2019, 12, 320. [Google Scholar] [CrossRef] [Green Version]
- Zhong, W.; Shen, W.Z.; Wang, T.; Li, Y. A tip loss correction model for wind turbine aerodynamic performance prediction. Renew. Energy 2020, 147, 223–238. [Google Scholar] [CrossRef]
- Echjijem, I.; Djebli, A. Design and Optimization of Wind Turbine with Axial Induction Factor and Tip Loss Corrections. Procedia Manuf. 2020, 46, 708–714. [Google Scholar] [CrossRef]
- Liu, X.; Liang, S.; Li, G.; Godbole, A.; Lu, C. An improved dynamic stall model and its effect on wind turbine fatigue load prediction. Renew. Energy 2020, 156, 117–130. [Google Scholar] [CrossRef]
- Arramach, J.; Boutammachte, N.; Bouatem, A.; Mers, A.A. Prediction of the Wind Turbine Performance by Using a Modified BEM Theory with an Advanced Brake State Model. Energy Procedia 2017, 118, 149–157. [Google Scholar] [CrossRef]
- Ponta, F.L.; Otero, A.D.; Lago, L.I.; Rajan, A. Effects of rotor deformation in wind-turbine performance: The Dynamic Rotor Deformation Blade Element Momentum model (DRD–BEM). Renew. Energy 2016, 92, 157–170. [Google Scholar] [CrossRef] [Green Version]
- Rajan, A.; Ponta, F.L. Aeroelastic analysis of the 3-dimensional interference patterns of wind-turbine rotors: The 3-D DRD-BEM model. Renew. Energy Focus 2018, 26, 22–38. [Google Scholar] [CrossRef]
- Chen, C.; Duffouer, P.; Fromme, P. Modelling wind turbine tower-rotor interaction through an aerodynamic damping matrix. J. Sound Vib. 2020, 489, 115667. [Google Scholar] [CrossRef]
- Branlard, E.; Jonkman, J.; Dana, S.; Doubrawa, P. A digital twin based on OpenFAST linearizations for real-time load and fatigue estimation of land-based turbines. J. Phys. Conf. Ser. (TORQUE2020) 2020, 2, 1618. [Google Scholar] [CrossRef]
- Pimenta, F.; Pacheco, J.; Branco, C.M.; Teixeira, C.M.; Magalhães, F. Development of a digital twin of an onshore wind turbine using monitoring data. J. Phys. Conf. Ser. (TORQUE2020) 2020, 2, 1618. [Google Scholar] [CrossRef]
- Sayed, M.; Klein, L.; Lutz, T.; Krämer, E. The impact of the aerodynamic model fidelity on the aeroelastic response of a multi-megawatt wind turbine. Renew. Energy 2019, 140, 304–318. [Google Scholar] [CrossRef]
- Loss, T.; Bergmann, A. Moving Accelerometers to the Tip: Monitoring of Wind Turbine Blade Bending Using 3D Accelerometers and Model-Based Bending Shapes. Sensors 2020, 20, 5337. [Google Scholar] [CrossRef] [PubMed]
- Boudounit, H.; Tarfaoui, M.; Saifaoui, D. Modal analysis for optimal design of offshore wind turbine blades. Mater. Today: Proc. 2020, 30, 998–1004. [Google Scholar] [CrossRef]
- Navadeh, N.; Goroshko, I.; Zhuk, Y.; Moghadam, F.E.; Fallah, A.S. Finite Element Analysis of Wind Turbine Blade Vibrations. Vibration 2021, 4, 310–322. [Google Scholar] [CrossRef]
- Sessarego, M.; Ramos-García, N.; Yang, H.; Shen, W.Z. Aerodynamic wind-turbine rotor design using surrogate modeling and three-dimensional viscous–inviscid interaction technique. Renew. Energy 2016, 93, 620–635. [Google Scholar] [CrossRef] [Green Version]
- Slot, R.M.M.; Sørensen, J.D.; Sudret, B.; Svenningsen, L.; Thøgersen, M.L. Surrogate model uncertainty in wind turbine reliability assessment. Renew. Energy 2020, 151, 1150–1162. [Google Scholar] [CrossRef] [Green Version]
- Oh, S. Comparison of a Response Surface Method and Artificial Neural Network in Predicting the Aerodynamic Performance of a Wind Turbine Airfoil and Its Optimization. Appl. Sci. 2020, 10, 6277. [Google Scholar] [CrossRef]
- Jensen, N.O. A Note on Wind Generator Interaction; Risø National Laboratory: Roskilde, Denmark, 1983; Risø-M No. 2411. [Google Scholar]
- Shakoor, R.; Hassan, M.Y.; Raheem, A.; Wu, Y.-K. Wake effect modeling: A review of wind farm layout optimization using Jensen’s model. Renew. Sustain. Energy Rev. 2016, 58, 1048–1059. [Google Scholar] [CrossRef]
- Revaz, T.; Porté-Agel, F. Large-Eddy Simulation of Wind Turbine Flows: A New Evaluation of Actuator Disk Models. Energies 2021, 14, 3745. [Google Scholar] [CrossRef]
- Wu, Y.; Porté-Agel, F. Modeling turbine wakes and power losses within a wind farm using LES: An application to the Horns Rev offshore wind farm. Renew. Energy 2015, 75, 945–955. [Google Scholar] [CrossRef]
- Wu, Y.; Porté-Agel, F. Large-Eddy Simulation of Wind-Turbine Wakes: Evaluation of Turbine Parametrisations. Bound.-Layer Meteorol. 2011, 138, 345–366. [Google Scholar] [CrossRef]
- Sanderse, B.; Pijl, S.P.V.; Koren, B. Review of computational fluid dynamics for wind turbine wake aerodynamics. Wind Energy 2011, 14, 799–819. [Google Scholar] [CrossRef] [Green Version]
- Keane, A. Advancement of an analytical double-Gaussian full wind turbine wake model. Renew. Energy 2021, 171, 687–708. [Google Scholar] [CrossRef]
- Martinez-Tossas, L.A.; Annoni, J.; Fleming, P.A.; Churchfield, M.J. The aerodynamics of the curled wake: A simplified model in view of flow control. Wind Energy Sci. 2019, 4, 127–138. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Jin, X.; Liu, H.; Li, F.; Luo, M. Large scale wind turbine TMD optimization based on Blade-Nacelle-Tower-Foundation Coupled Model. Ocean Eng. 2021, 239, 109764. [Google Scholar] [CrossRef]
- Ko, Y.-Y. A simplified structural model for monopile-supported offshore wind turbines with tapered towers. Renew. Energy 2020, 156, 777–790. [Google Scholar] [CrossRef]
- Sajeer, M.M.; Mitra, A.; Chakraborty, A. Multi-body dynamic analysis of offshore wind turbine considering soil–structure interaction for fatigue design of monopile. Soil Dyn. Earthq. Eng. 2021, 144, 106674. [Google Scholar] [CrossRef]
- Banerjee, A.; Chakraborty, T.; Matsagar, V.; Achmus, M. Dynamic analysis of an offshore wind turbine under random wind and wave excitation with soil–structure interaction and blade tower coupling. Soil Dyn. Earthq. Eng. 2019, 125, 105699. [Google Scholar] [CrossRef]
- Silva, L.S.P.; Cazzolato, B.; Sergiienko, N.Y.; Ding, B. Nonlinear dynamics of a floating offshore wind turbine platform via statistical quadratization—Mooring, wave and current interaction. Ocean Eng. 2021, 236, 109471. [Google Scholar] [CrossRef]
- Hu, Y.; Yang, J.; Baniotopoulos, C.; Wang, X.; Deng, X. Dynamic analysis of offshore steel wind turbine towers subjected to wind, wave and current loading during construction. Ocean Eng. 2020, 216, 108084. [Google Scholar] [CrossRef]
- Li, M.; Kefal, A.; Oterkus, E.; Oterkus, S. Structural health monitoring of an offshore wind turbine tower using iFEM methodology. Ocean Eng. 2020, 204, 107291. [Google Scholar] [CrossRef]
- Li, Z.; Wen, B.; Peng, Z.; Dong, X.; Qu, Y. Dynamic modeling and analysis of wind turbine drivetrain considering the effects of non-torque loads. Appl. Math. Model. 2020, 83, 146–168. [Google Scholar] [CrossRef]
- Li, Z.; Wen, B.; Wei, K.; Yang, W.; Peng, Z.; Zhang, W. Flexible dynamic modeling and analysis of drive train for Offshore Floating Wind Turbine. Renew. Energy 2020, 145, 1292–1305. [Google Scholar] [CrossRef]
- Guo, Y.; Sheng, S.; Phillips, C.; Keller, J.; Veers, P.; Williams, L. A methodology for reliability assessment and prognosis of bearing axial cracking in wind turbine gearboxes. Renew. Sustain. Energy Rev. 2020, 127, 109888. [Google Scholar] [CrossRef]
- Bal, H.; Aktürk, N. Vibration modeling of wind turbine shaft as rigid shaft supported by EHLcontact ball bearings with overhung disc system. Tribol. Int. 2020, 151, 106481. [Google Scholar] [CrossRef]
- Gong, X.; Qiao, W. Bearing Fault Diagnosis for Direct-Drive Wind Turbines via Current-Demodulated Signals. IEEE Trans. Ind. Electron. 2013, 60, 3419–3428. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Xu, W.; Liu, Y.; Islam, M.R. Bearing Corrosion Failure Diagnosis of Doubly Fed Induction Generator in Wind Turbines Based on Stator Current Analysis. IEEE Trans. Ind. Electron. 2020, 67, 3419–3430. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Wang, X.; Zhang, L. Fault Diagnosis of Industrial Wind Turbine Blade Bearing Using Acoustic Emission Analysis. IEEE Trans. Instrum. Meas. 2020, 69, 6630–6639. [Google Scholar] [CrossRef]
- Chen, J.; Pan, J.; Li, Z.; Zi, Y.; Chen, X. Generator bearing fault diagnosis for wind turbine via empirical wavelet transform using measured vibration signals. Renew. Energy 2016, 89, 80–92. [Google Scholar] [CrossRef]
- Borovik, S.; Sekisov, Y. Single-Coil Eddy Current Sensors and Their Application for Monitoring the Dangerous States of Gas-Turbine Engines. Sensors 2020, 20, 2107. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, M.; Feng, G.; He, Q.; Gu, F.; Ball, A. Vibration Characteristics of Rolling Element Bearings with Different Radial Clearances for Condition Monitoring of Wind Turbine. Appl. Sci. 2020, 10, 4731. [Google Scholar] [CrossRef]
- Teng, W.; Ding, X.; Tang, S.; Xu, J.; Shi, B.; Liu, Y. Vibration Analysis for Fault Detection of Wind Turbine Drivetrains—A Comprehensive Investigation. Sensors 2021, 21, 1686. [Google Scholar] [CrossRef]
- Bozorgmehri, B.; Hurskainen, V.-V.; Matikainen, M.K.; Mikkola, A. Dynamic analysis of rotating shafts using the absolute nodal coordinate formulation. J. Sound Vib. 2019, 453, 214–236. [Google Scholar] [CrossRef]
- Wang, R.; Han, T.; Wang, W.; Xue, Y.; Fu, D. Fracture analysis and improvement of the main shaft of wind turbine based on finite element method. Adv. Mech. Eng. 2018, 10, 1–9. [Google Scholar] [CrossRef]
- Kayedpour, N.; Samani, A.E.; Kooning, J.D.M.D.; Vandevelde, L.; Crevecoeur, G. Robust approximation models for predictive control of a variable pitch wind power drivetrain. In Proceedings of the 8th IET Renewable Power Generation Conference (RPG 2019), Shanghai, China, 24–25 October 2019. [Google Scholar]
- Dali, A.; Abdelmalek, S.; Bakdi, A.; Bettayeb, M. A new robust control scheme: Application for MPP tracking of a PMSG-based variable-speed wind turbine. Renew. Energy 2021, 172, 1021–1034. [Google Scholar] [CrossRef]
- Cho, S.-Y.; Shin, W.-G.; Park, J.-S.; Kim, W.-H. A Torque Compensation Control Scheme of PMSM Considering Wide Variation of Permanent Magnet Temperature. IEEE Trans. Magn. 2019, 55, 8200105. [Google Scholar] [CrossRef]
- Li, L.; Xiao, J.; Zhao, Y.; Liu, K.; Peng, X.; Luan, H.; Li, K. Robust position anti-interference control for PMSM servo system with uncertain disturbance. CES Trans. Electr. Mach. Syst. 2020, 4, 151–160. [Google Scholar] [CrossRef]
- Pan, L.; Shao, C. Wind energy conversion systems analysis of PMSG on offshore wind turbine using improved SMC and Extended State Observer. Renew. Energy 2020, 161, 149–161. [Google Scholar] [CrossRef]
- Jia, L.; Lin, M.; Le, W.; Li, N.; Kong, Y. Dual-Skew Magnet for Cogging Torque Minimization of Axial Flux PMSM With Segmented Stator. IEEE Trans. Magn. 2020, 56, 7507306. [Google Scholar] [CrossRef]
- Tong, W.; Wu, S.; Tang, R. Research on the Airflow and Thermal Performance in a Large Forced Air-Cooled Permanent Magnet Synchronous Machine. IEEE Access 2019, 7, 162343–162352. [Google Scholar] [CrossRef]
- Sergeant, P.; Belie, F.D.; Melkebeek, J. Effect of Rotor Geometry and Magnetic Saturation in Sensorless Control of PM Synchronous Machines. IEEE Trans. Magn. 2009, 45, 1756–1759. [Google Scholar] [CrossRef]
- Shen, M.; Pfister, P.; Tang, C.; Fang, Y. A Hybrid Model of Permanent-Magnet Machines Combining Fourier Analytical Model With Finite Element Method, Taking Magnetic Saturation Into Account. IEEE Trans. Magn. 2021, 57, 1. [Google Scholar] [CrossRef]
- Hemeida, A.; Sergeant, P. Analytical Modeling of Surface PMSM Using a Combined Solution of Maxwells Equations and Magnetic Equivalent Circuit. IEEE Trans. Magn. 2014, 50, 7027913. [Google Scholar] [CrossRef]
- Kumar, R.R.; Singh, S.K.; Srivastava, R.K.; Vardhan, A.S.S.; Elavarasan, R.M.; Saket, R.K.; Hossain, E. Modeling of Airgap Fluxes and Performance Analysis of Five Phase Permanent Magnet Synchronous Generator for Wind Power Application. IEEE Access 2020, 8, 195472–195486. [Google Scholar] [CrossRef]
- Phuc, P.N.; Bozalakov, D.; Vansompel, H.; Stockman, K.; Crevecoeur, G. Rotor temperature virtual sensing for induction machines using a lumped-parameter thermal network and dual Kalman filtering. IEEE Trans. Energy Convers. 2021, 36, 1688–1699. [Google Scholar] [CrossRef]
- Urasaki, N.; Senjyu, T.; Uezato, K. A novel calculation method for iron loss resistance suitable in modeling permanent-magnet synchronous motors. IEEE Trans. Energy Convers. 2003, 18, 41–47. [Google Scholar] [CrossRef]
- Cavallaro, C.; Tommaso, A.O.D.; Miceli, R.; Raciti, A.; Galluzzo, G.R.; Trapanese, M. Efficiency enhancement of permanent-magnet synchronous motor drives by online loss minimization approaches. IEEE Trans. Ind. Electron. 2005, 52, 1153–1160. [Google Scholar] [CrossRef] [Green Version]
- De Kooning, J.D.M.; de Vyver, J.V.; Meersman, B.; Vandevelde, L. Maximum Efficiency Current Waveforms for a PMSM Including Iron Losses and Armature Reaction. IEEE Trans. Ind. Appl. 2017, 53, 3336–3344. [Google Scholar] [CrossRef]
- Bu, F.; Yang, Z.; Gao, Y.; Pan, Z.; Pu, T.; Degano, M.; Gerada, C. Speed Ripple Reduction of Direct-Drive PMSM Servo System at Low-Speed Operation Using Virtual Cogging Torque Control Method. IEEE Trans. Ind. Electron. 2021, 68, 160–174. [Google Scholar] [CrossRef]
- Hung, J.; Ding, Z. Design of currents to reduce torque ripple in brushless permanent magnet motors. IEE Proc. B 1993, 140, 260–266. [Google Scholar] [CrossRef]
- Hajji, T.E.; Hlioui, S.; Louf, F.; Gabsi, M.; Mermaz-Rollet, G.; Belhadi, M. Hybrid model for AC Losses in High Speed PMSM for arbitrary flux density waveforms. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020. [Google Scholar] [CrossRef]
- Rassõlkin, A.; Rjabtšikov, V.; Vaimann, T.; Kallaste, A.; Kuts, V.; Partyshev, A. Digital Twin of an Electrical Motor Based on Empirical Performance Model. In Proceedings of the 2020 XI International Conference on Electrical Power Drive Systems (ICEPDS), Saint-Petersburg, Russia, 4–7 October 2020. [Google Scholar]
- Falekas, G.; Karlis, A. Digital Twin in Electrical Machine Control and Predictive Maintenance: State-of-the-Art and Future Prospects. Energies 2021, 14, 5933. [Google Scholar] [CrossRef]
- Sun, R.; Yang, D.; Shi, D.; Zhuo, L.; Peng, H. Quickly and High-Precision Digital Twin Device-Level Simulation Modeling of Permanent Magnet Synchronous Generator and Voltage Stabilizing System. In Proceedings of the 2021 IEEE International Magnetic Conference (INTERMAG), Lyon, France, 26–30 April 2021. [Google Scholar]
- Raghavendran, C.R.; Roselyn, J.P.; Devaraj, D. Development and performance analysis of intelligent fault ride through control scheme in the dynamic behaviour of grid connected DFIG based wind systems. Energy Rep. 2020, 6, 2560–2576. [Google Scholar] [CrossRef]
- Iglesias, R.L.; Arantegui, R.L.; Alonso, M.A. Power electronics evolution in wind turbines—A market-based analysis. Renew. Sustain. Energy Rev. 2011, 15, 4982–4993. [Google Scholar] [CrossRef]
- Miyaoku, Y.; Tone, A.; Matsuura, K.; Miura-Mattausch, M.; Mattausch, H.J.; Ikoma, D. Compact Modeling of IGBT Charging/Discharging for Accurate Switching Prediction. IEEE J. Electron Devices Soc. 2020, 8, 1373–1380. [Google Scholar] [CrossRef]
- Duan, Y.; Xiao, F.; Luo, Y.; Iannuzzo, F. A Lumped-Charge Approach Based Physical SPICE-Model for High Power Soft-Punch Through IGBT. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 62–70. [Google Scholar] [CrossRef] [Green Version]
- Cao, H.; Ning, P.; Wen, X.; Yuan, T.; Li, H. An Electrothermal Model for IGBT Based on Finite Differential Method. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 673–684. [Google Scholar] [CrossRef]
- Xu, Y.; Ho, C.N.M.; Ghosh, A.; Muthumuni, D. An Electrical Transient Model of IGBT-Diode Switching Cell for Power Semiconductor Loss Estimation in Electromagnetic Transient Simulation. IEEE Trans. Power Electron. 2020, 35, 2979–2989. [Google Scholar] [CrossRef]
- Zhao, B.; Zeng, R.; Li, J.; Wei, T.; Chen, Z.; Song, Q.; Yu, Z. Practical Analytical Model and Comprehensive Comparison of Power Loss Performance for Various MMCs Based on IGCT in HVDC Application. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 1071–1083. [Google Scholar] [CrossRef]
- Xu, Y.; Ho, C.N.M.; Ghosh, A.; Muthumuni, D. Generalized Behavioral Modelling Methodology of Switch-Diode Cell for Power Loss Prediction in Electromagnetic Transient Simulation. Energies 2021, 14, 1500. [Google Scholar] [CrossRef]
- Wang, P.; Chen, X.; Tong, C.; Jia, P.; Wen, C. Large- and Small-Signal Average-Value Modeling of Dual-Active-Bridge DC-DC Converter with Triple-Phase-Shift Control. IEEE Trans. Power Electron. 2021, 36, 9237–9250. [Google Scholar] [CrossRef]
- Meo, S.; Toscano, L. Some New Results on the Averaging Theory Approach for the Analysis of Power Electronic Converters. IEEE Trans. Ind. Electron. 2018, 65, 9367–9377. [Google Scholar] [CrossRef]
- Ayachit, A.; Kazimierczuk, M.K. Averaged Small-Signal Model of PWM DC-DC Converters in CCM Including Switching Power Loss. IEEE Trans. Circuits Syst. II: Express Briefs 2019, 66, 262–266. [Google Scholar] [CrossRef]
- Li, X.; Ruan, X.; Jin, Q.; Sha, M.; Tse, C.K. Approximate Discrete-Time Modeling of DC–DC Converters With Consideration of the Effects of Pulse Width Modulation. IEEE Trans. Power Electron. 2018, 33, 7071–7082. [Google Scholar] [CrossRef]
- Milton, M.; Ginn, C.D.L.O.H.L.; Benigni, A. Controller-Embeddable Probabilistic Real-Time Digital Twins for Power Electronic Converter Diagnostics. IEEE Trans. Power Electron. 2020, 35, 9850–9864. [Google Scholar] [CrossRef]
- Bai, H.; Liu, C.; Rathore, A.K.; Paire, D.; Gao, F. An FPGA-Based IGBT Behavioral Model With High Transient Resolution for Real-Time Simulation of Power Electronic Circuits. IEEE Trans. Ind. Electron. 2019, 66, 6581–6591. [Google Scholar] [CrossRef]
- Peng, Y.; Zhao, S.; Wang, H. A Digital Twin Based Estimation Method for Health Indicators of DC–DC Converters. IEEE Trans. Power Electron. 2021, 36, 2105–2118. [Google Scholar] [CrossRef]
- Baharani, M.; Biglarbegian, M.; Parkhideh, B.; Tabkhi, H. Real-Time Deep Learning at the Edge for Scalable Reliability Modeling of Si-MOSFET Power Electronics Converters. IEEE Internet Things J. 2019, 6, 7375–7385. [Google Scholar] [CrossRef]
- Zhang, J.; Du, X.; Qian, C.; Tai, H.-M. A quasi-online condition monitoring technique for the wind power converter. Int. J. Electr. Power Energy Syst. 2021, 130, 106971. [Google Scholar] [CrossRef]
- Asmussen, M.F.; Liniger, J.; Pedersen, H.C. Fault Detection and Diagnosis Methods for Fluid Power Pitch System Components — A Review. Energies 2021, 14, 1305. [Google Scholar] [CrossRef]
- Vásquez, S.; Kinnaert, M.; Pintelon, R. Active Fault Diagnosis on a Hydraulic Pitch System Based on Frequency-Domain Identification. IEEE Trans. Control Syst. Technol. 2019, 27, 663–678. [Google Scholar] [CrossRef]
- Baiomy, N.; Kikuuwe, R. An amplitude- and rate-saturated collective pitch controller for wind turbine systems. Renew. Energy 2020, 158, 400–409. [Google Scholar] [CrossRef]
- Tang, X.; Yin, M.; Shen, C.; Xu, Y.; Dong, Z.Y.; Zou, Y. Active Power Control of Wind Turbine Generators via Coordinated Rotor Speed and Pitch Angle Regulation. IEEE Trans. Sustain. Energy 2021, 10, 822–832. [Google Scholar] [CrossRef]
- Badihi, H.; Zhang, Y.; Pillay, P.; Rakheja, S. Fault-Tolerant Individual Pitch Control for Load Mitigation in Wind Turbines With Actuator Faults. IEEE Trans. Ind. Electron. 2021, 68, 532–543. [Google Scholar] [CrossRef]
- Luo, Y.; Cui, L.; Zhang, J.; Ma, J. Vibration mechanism and improved phenomenological model of planetary gearbox with broken sun gear fault. Measurement 2021, 178, 109356. [Google Scholar] [CrossRef]
- Graja, O.; Zghal, B.; Dziedziech, K.; Chaari, F.; Jablonski, A.; Barszcz, T.; Haddar, M. Simulating the dynamic behavior of planetary gearbox based on improved Hanning function. Comptes Rendus Mécanique 2019, 347, 49–61. [Google Scholar] [CrossRef]
- Tatar, A.; Schwingshackl, C.W. Effect of a Planetary Gearbox on the Dynamics of a Rotor System. In Proceedings of the ASME Turbo Expo 2018: Turbomachinery Technical Conference and Exposition, Oslo, Norway, 11–15 June 2018. [Google Scholar] [CrossRef]
- Li, H.; Yang, C.; Hu, Y.; Liao, X.; Zeng, Z.; Zhe, C. An improved reduced-order model of an electric pitch drive system for wind turbine control system design and simulation. Renew. Energy 2016, 93, 188–200. [Google Scholar] [CrossRef]
- Irizar, V.; Andreasen, C.S. Hydraulic pitch control system for wind turbines: Advanced modeling and verification of an hydraulic accumulator. Simul. Model. Pract. Theory 2017, 79, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Yin, X.; Zhao, X. Composite Hierarchical Pitch Angle Control for a Tidal Turbine Based on the Uncertainty and Disturbance Estimator. IEEE Trans. Ind. Electron. 2020, 67, 329–339. [Google Scholar] [CrossRef]
- Yin, X.; Zhang, W.; Jiang, Z.; Pan, L. Adaptive robust integral sliding mode pitch angle control of an electro-hydraulic servo pitch system for wind turbine. Mech. Syst. Signal Process. 2019, 133, 105704. [Google Scholar] [CrossRef]
- Song, D.R.; Li, Q.A.; Cai, Z.; Li, L.; Yang, J.; Su, M.; Joo, Y.H. Model Predictive Control Using Multi-Step Prediction Model for Electrical Yaw System of Horizontal-Axis Wind Turbines. IEEE Trans. Sustain. Energy 2019, 10, 2084–2093. [Google Scholar] [CrossRef]
- Dai, J.; He, T.; Li, M.; Long, X. Performance study of multi-source driving yaw system for aiding yaw control of wind turbines. Renew. Energy 2021, 163, 154–171. [Google Scholar] [CrossRef]
- Wei, L.; Qian, Z.; Zareipour, H. Wind Turbine Pitch System Condition Monitoring and Fault Detection Based on Optimized Relevance Vector Machine Regression. IEEE Trans. Sustain. Energy 2020, 11, 2326–2336. [Google Scholar] [CrossRef]
- Cho, S.; Choi, M.; Gao, Z.; Moan, T. Fault detection and diagnosis of a blade pitch system in a floating wind turbine based on Kalman filters and artificial neural networks. Renew. Energy 2021, 169, 1–13. [Google Scholar] [CrossRef]
- DOCC-OFF. Scaling-up Digitalization of Critical Components in Offshore Wind Turbines. 2021. Available online: https://www.doccoffproject.eu/en/ (accessed on 8 November 2021).
- de Klerk, D.; Rixen, D.J.; Voormeeren, S.N. General framework for dynamic substructuring: History, review and classification of techniques. AIAA J. Devoted Aerosp. Res. Dev. 2008, 46, 1169–1181. [Google Scholar] [CrossRef]
- Gao, Z.; Liu, X. An Overview on Fault Diagnosis, Prognosis and Resilient Control for Wind Turbine Systems. Processes 2021, 9, 300. [Google Scholar] [CrossRef]
- Smith, B.; Link, H.; Randall, G.; McCoy, T. Applicability of Nacelle Anemometer Measurements for Use in Turbine Power Performance Tests. In Proceedings of the American Wind Energy Association (AWEA) WINDPOWER 2002 Conference, Portland, Oregon, 2–5 June 2002. [Google Scholar]
- Mahdizadeh, A.; Schmid, R.; Oetomo, D. LIDAR-Assisted Exact Output Regulation for Load Mitigation in Wind Turbines. IEEE Trans. Control Syst. Technol. 2021, 29, 1102–1116. [Google Scholar] [CrossRef]
- Choi, D.; Shin, W.; Ko, K.; Rhee, W. Static and Dynamic Yaw Misalignments of Wind Turbines and Machine Learning Based Correction Methods Using LiDAR Data. IEEE Trans. Sustain. Energy 2019, 10, 971–982. [Google Scholar] [CrossRef]
- Cappelle, C.; Cattebeke, M.; Bosmans, J.; Kirchner, M.; Croes, J.; Desmet, W. Sensor selection for cost-effective virtual torque measurements on a wind turbine gearbox. Forsch. Im Ing.-Eng. Res. 2021, 85, 325–334. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Turbine Aerodynamics | Structure and Drivetrain Mechanics | PMSG | Power Electronics | Pitch and Yaw Systems | |
|---|---|---|---|---|---|
 | Computational Fluid Dynamics [69] FEM structural blade model [70,71,72] Large Eddy Simulation (LES) [78,79,80] | FEM model of turbine shaft [103] FEM model of the tower and support structure [89,90] | Electromagnetic FEM [109,110,111] | Dynamic switching models [127,128,129] Conduction and switching loss models [130,131] Transient wide-bandgap component models [132] | Full pitch drivetrain models [150,151,152,153] Full yaw drivetrain models [154,155] |
| Blade-Element Momentum [57] Extensions - Tip losses [60,61] - Dynamic stall [62,63] - Blade flexibility [64,65] - Tower and nacelle flow disturbance [66] - Gaussian [82] or Curl [83] wake model Surrogate models [73,74,75] | Multi-body drivetrain model [101,102] Multi-body tower and foundation model [84,85,86,87] Nonlinear dynamics of floating turbines [88] | Magnetic Equivalent Circuit [112,113,114] Lumped parameter thermal model [115] Stator current data- driven model [124] | Polynomial chaos expansion models [137] Deep learning LSTM [140] Thermal time constants [141] | Data-driven pitch models [156,157] | |
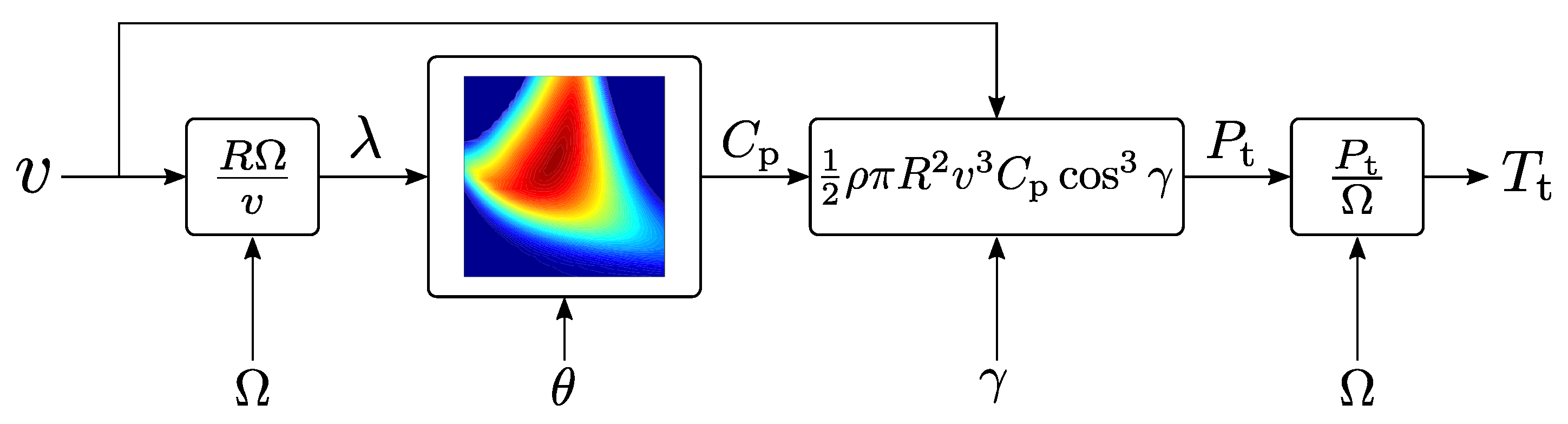
| Simplified turbine model, cfr. Figure 4 Extensions - Variable meteo-parameters [39,40,41,42] - Blade erosion and ageing [43,44,45,46] - Ice detection [48,49,50,51] - Tower shadow and wind shear [53,54,55,56] - Jensen’s wake model [76] | First order drivetrain dynamics (4)  Extensions - Non-linear bearing friction [93,94] - Bearing monitoring [95,96,97,98] - Fluid bearing monitoring [99] | Rotating reference frame model [105,106,107,108] (Figure 5) Extensions - Iron losses [116,117,118] - Magnetic saturation [113] - Cogging torque [119,120] - Skin effects [121] | Averaged converter model [133,134], cfr. Figure 6  Extensions Switching and conduction losses [135,136] | Rate limiter and saturation [144,145,146]  |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Kooning, J.D.M.; Stockman, K.; De Maeyer, J.; Jarquin-Laguna, A.; Vandevelde, L. Digital Twins for Wind Energy Conversion Systems: A Literature Review of Potential Modelling Techniques Focused on Model Fidelity and Computational Load. Processes 2021, 9, 2224. https://0-doi-org.brum.beds.ac.uk/10.3390/pr9122224
De Kooning JDM, Stockman K, De Maeyer J, Jarquin-Laguna A, Vandevelde L. Digital Twins for Wind Energy Conversion Systems: A Literature Review of Potential Modelling Techniques Focused on Model Fidelity and Computational Load. Processes. 2021; 9(12):2224. https://0-doi-org.brum.beds.ac.uk/10.3390/pr9122224
Chicago/Turabian StyleDe Kooning, Jeroen D. M., Kurt Stockman, Jeroen De Maeyer, Antonio Jarquin-Laguna, and Lieven Vandevelde. 2021. "Digital Twins for Wind Energy Conversion Systems: A Literature Review of Potential Modelling Techniques Focused on Model Fidelity and Computational Load" Processes 9, no. 12: 2224. https://0-doi-org.brum.beds.ac.uk/10.3390/pr9122224