
Optimization Based on Pattern Search Algorithm Applied to pH Non-Linear Control: Application to Alkalinization Process of Sugar Juice



Abstract
:1. Introduction
- The PSM improves the search for local minima to make the tuning more accurate values;
- When tuning the models obtained from the SIB T-S with CBMD with PSM, the obtained results improve compared with other authors;
- By optimizing the tuning process of control strategies applied to non-linear systems, such as NMPC reflects results with lower steady-state error than most other authors.
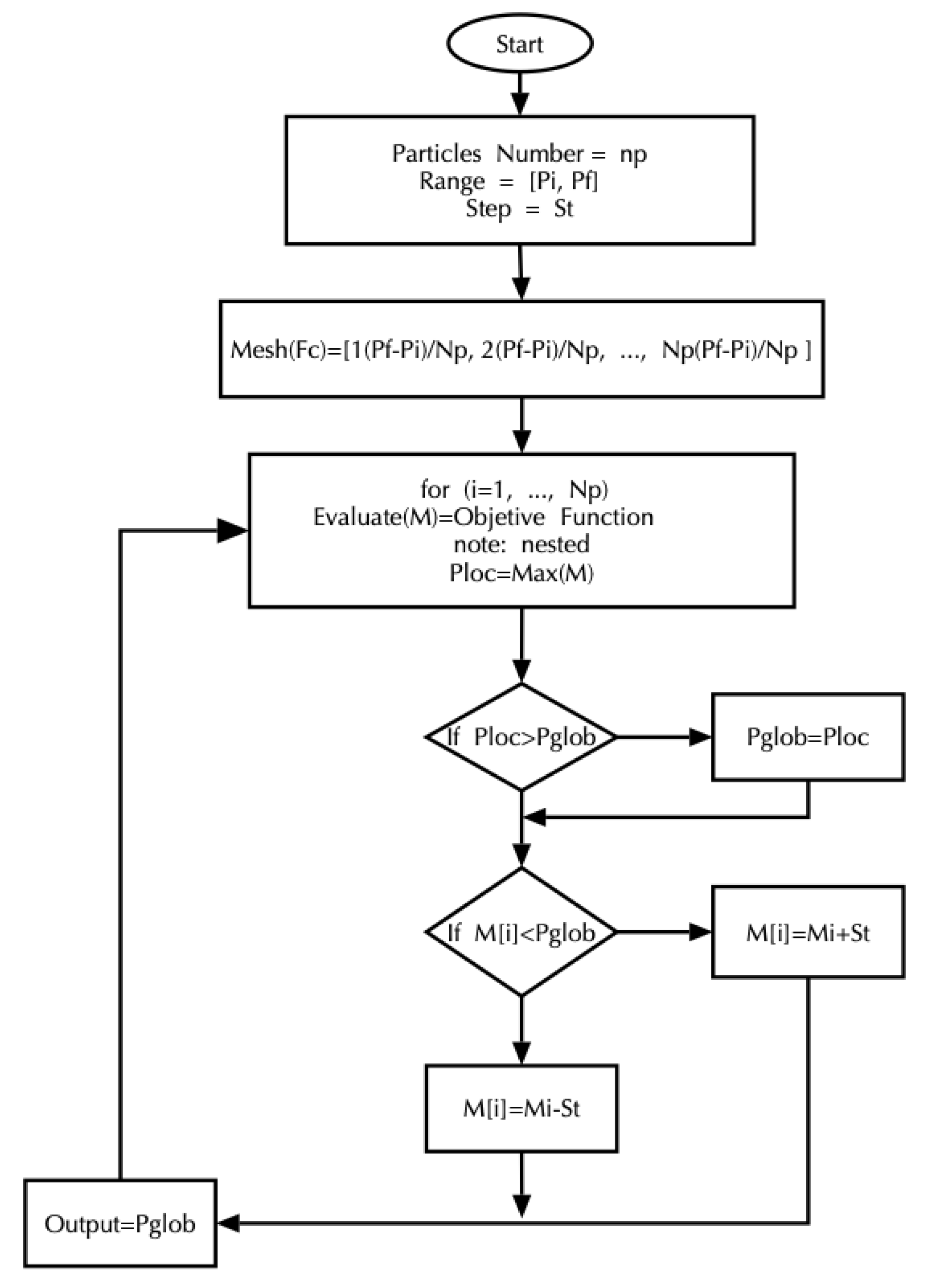
2. Generalized Pattern Search Method (GPSM)
3. Problem Formulation
3.1. Problem 1: SIB T-S and CBMD Model
3.1.1. Objective Function of the Model
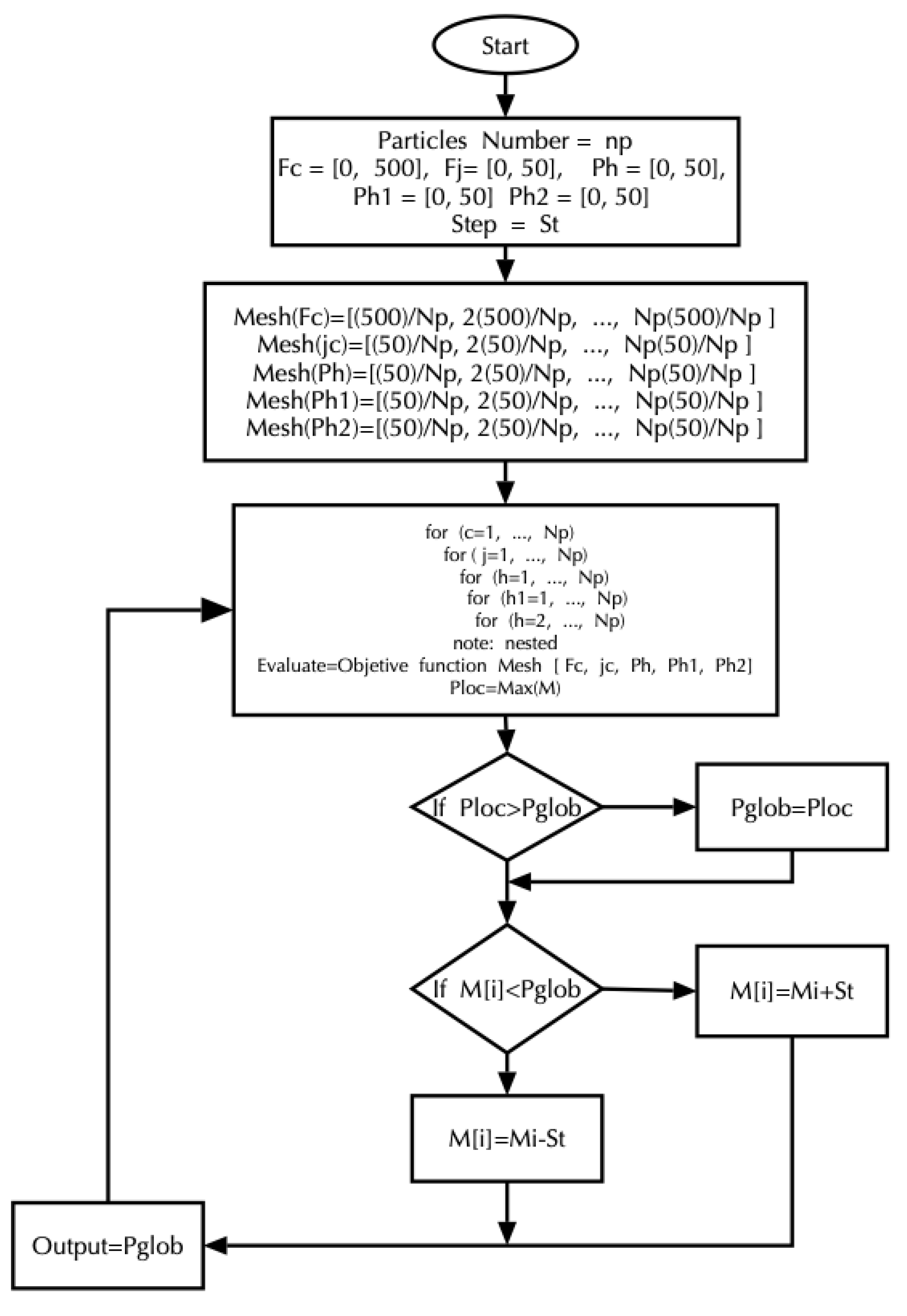
3.1.2. Control Algorithm Proposed Using GPSM to Obtain the Parameters of the SIB T-S and CBMD Model
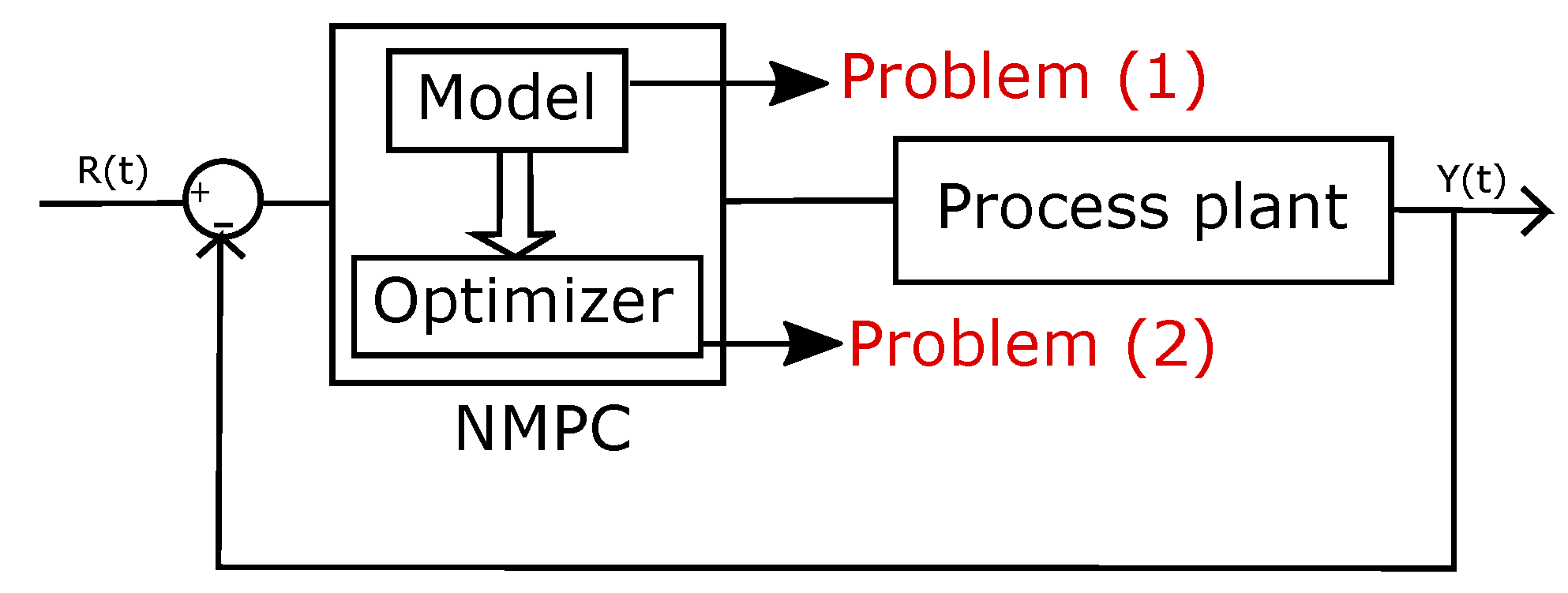
3.2. Problem 2, the Optimizer
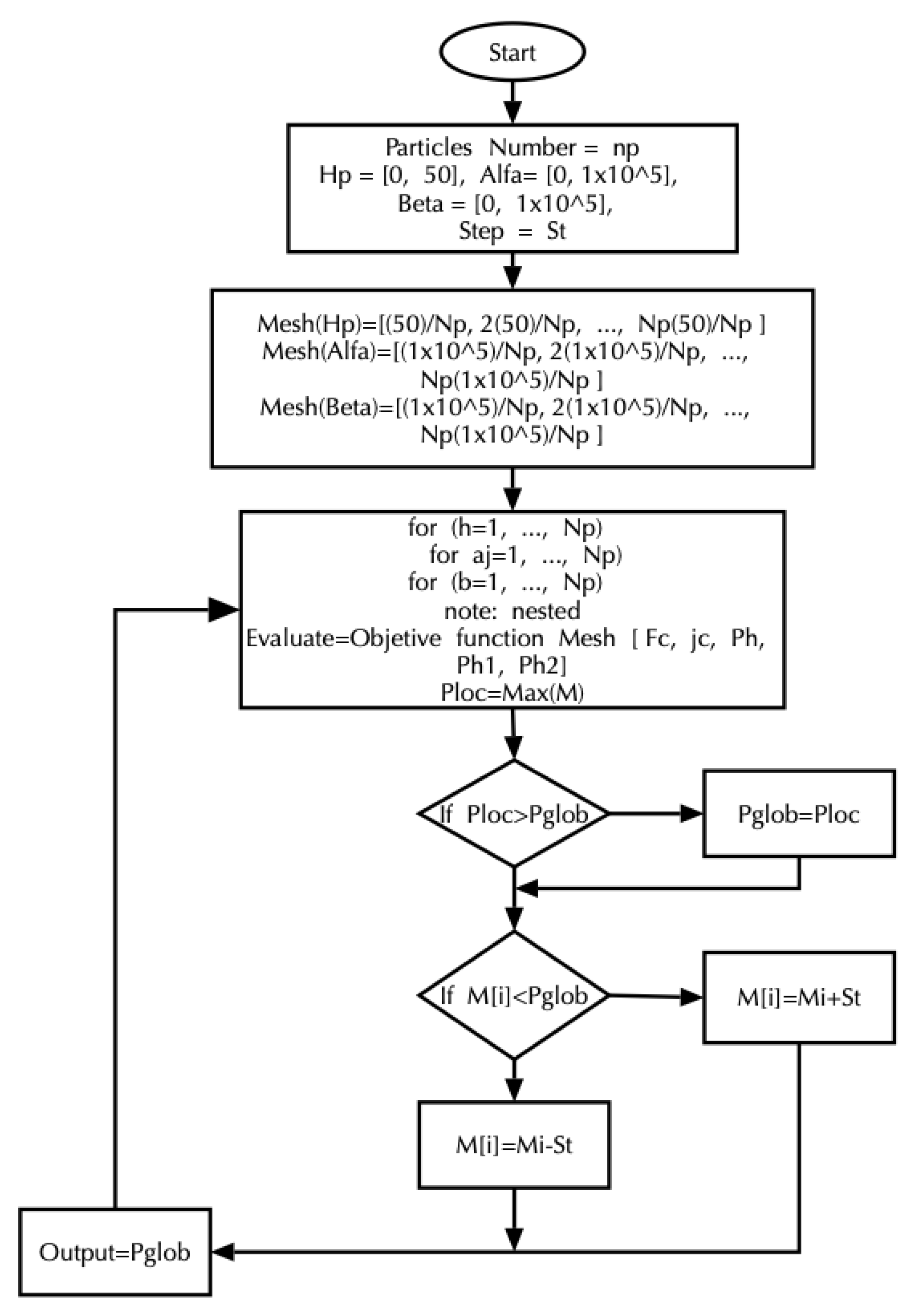
Control Algorithm Proposed Using GPSM to Obtain Tuner Parameters
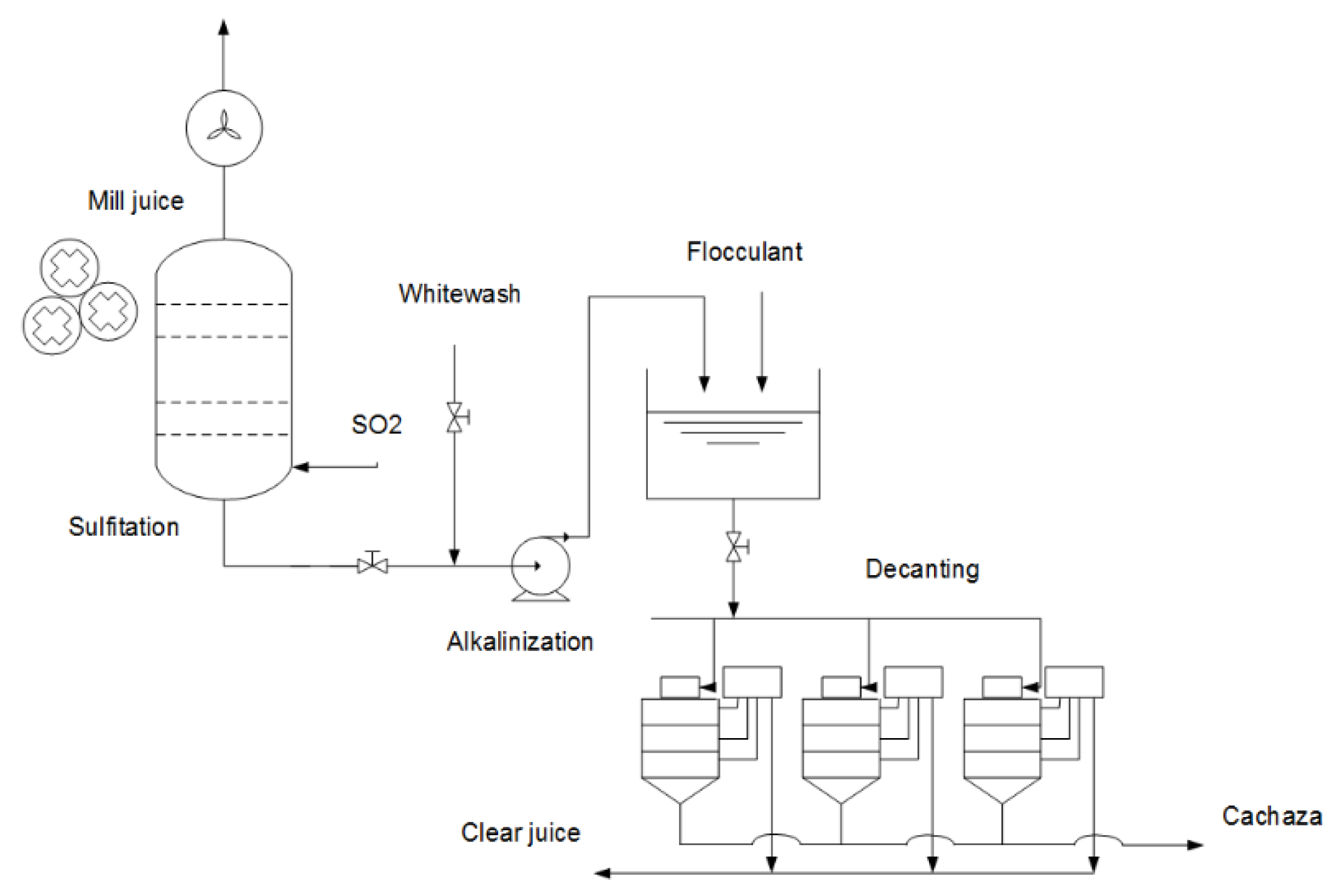
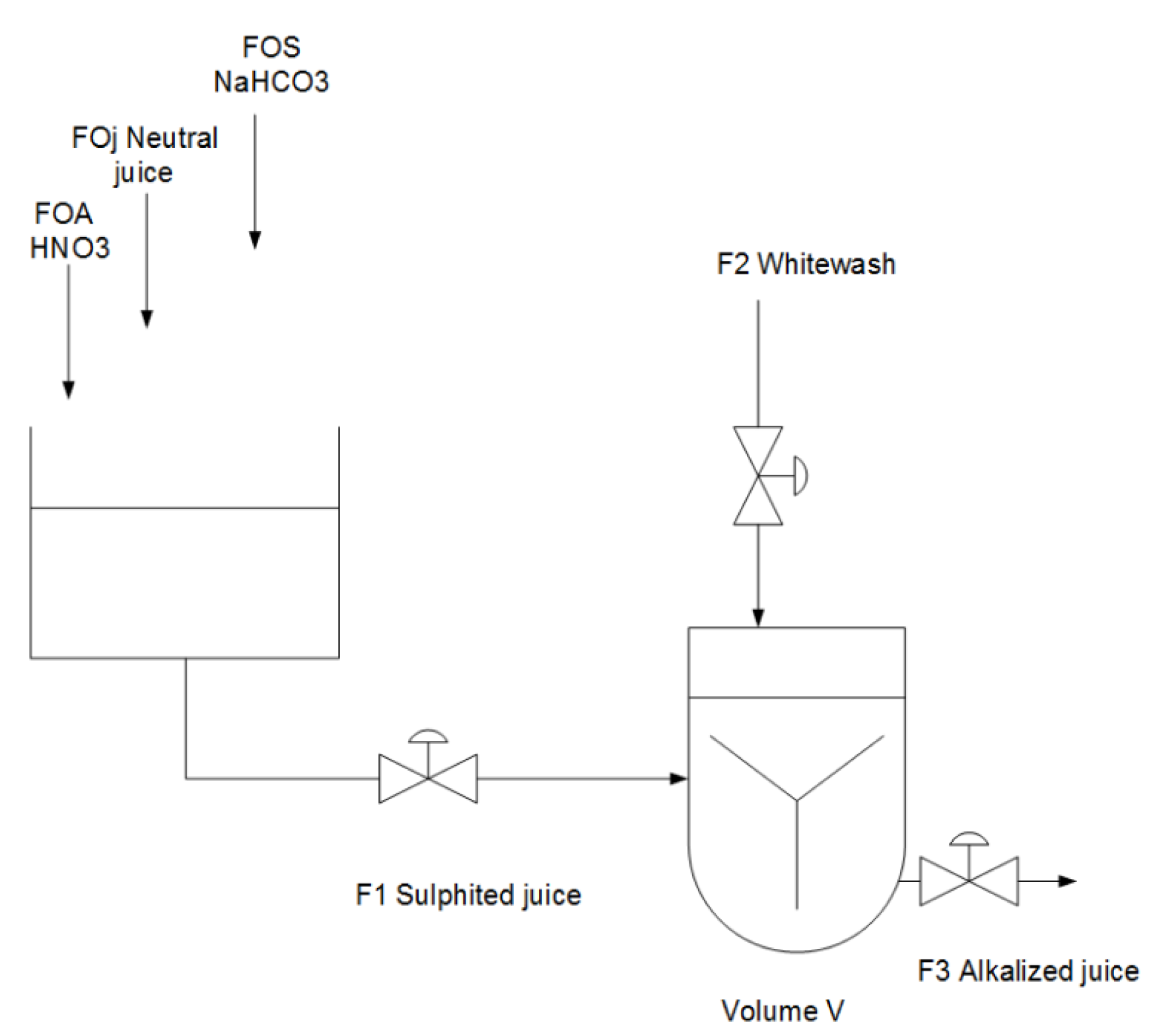
3.3. Case Study, Alkalinization of Sugar Cane Juice
- The final control element associated with pH control must guarantee exact base or acid values; this means small or large dosages that become process constraints;
- The pH response to an input that is the addition of reagents shows a non-linear behavior;
- In this type of process, the pH is presented as a controlled variable, and the manipulated variable is the addition of reagents;
- The process dead time changes depending on: the variation in the volume stored in the tank, the reagent inlet flow and the mixing speed;
- When the system gain is small (indicates a high acid content or low base content), generating a response with low speed.
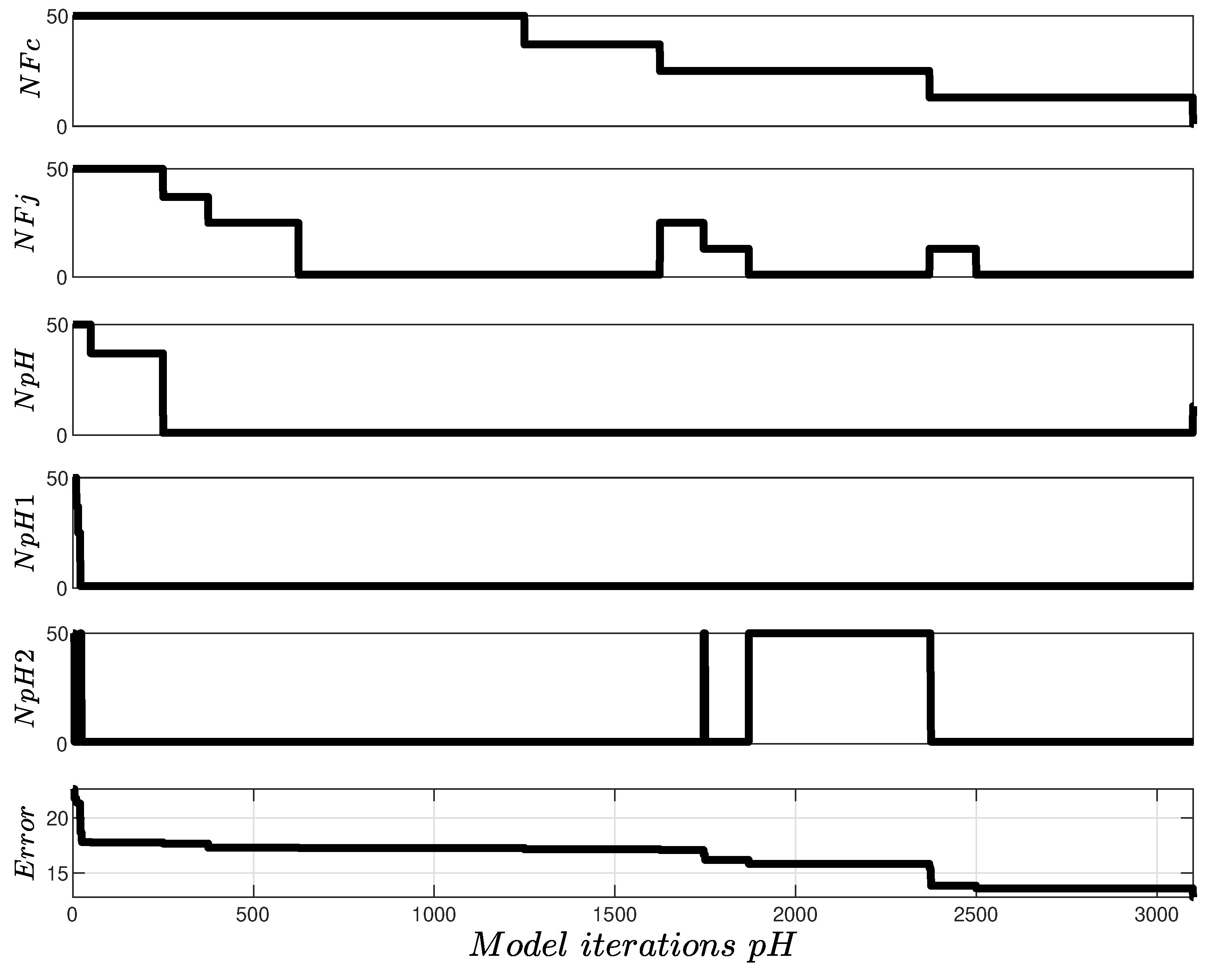
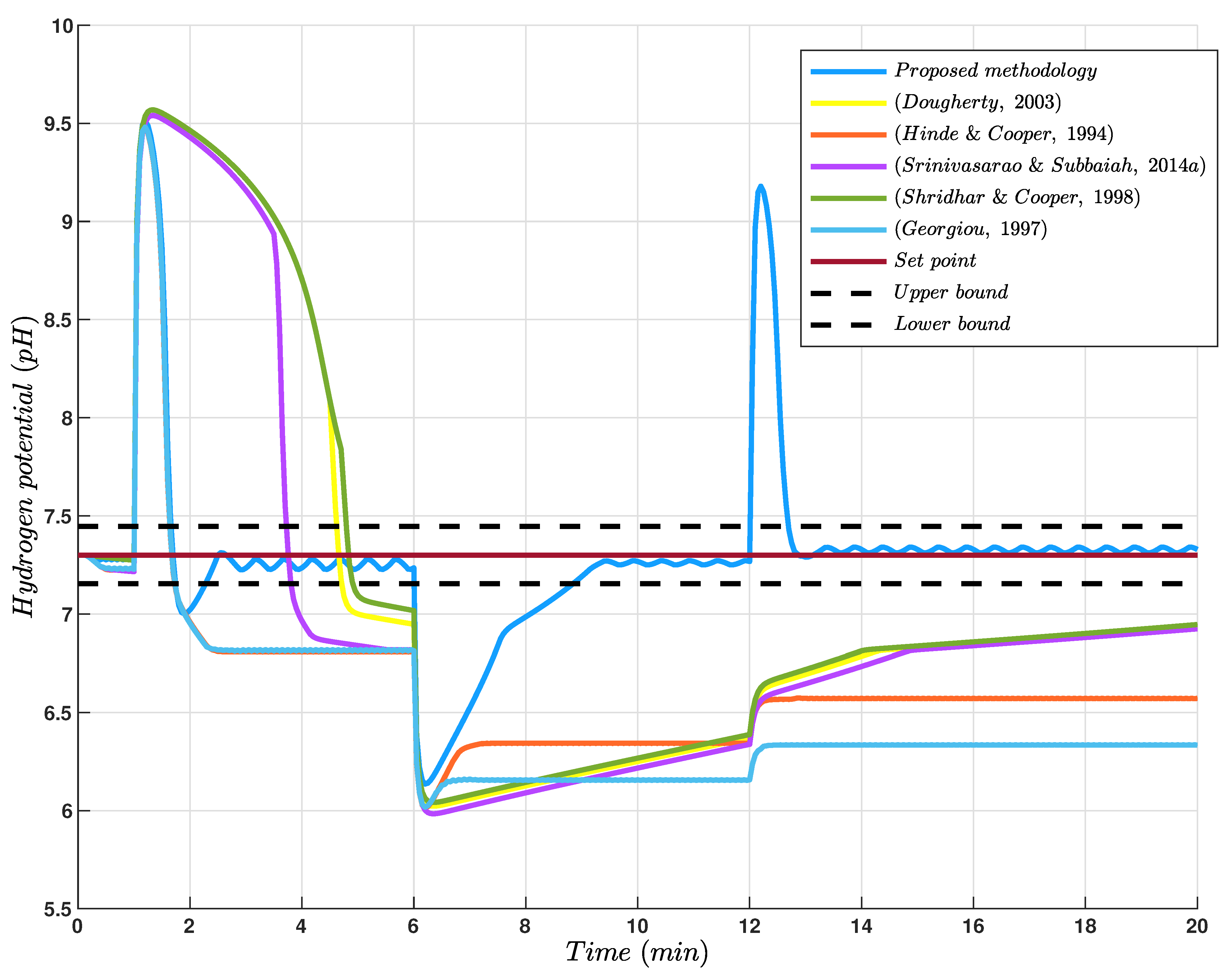
4. Analysis of Results
5. Conclusions
- It is identified that the models obtained using fuzzy inference systems SIB T-S and CBMD present a favorability for control-oriented applications, demonstrated to be more flexible in chemical processes with application in the industry. Thus improving their efficiency because they avoid the contribution of the uncertainties inherent to the model;
- The emergence of a novel optimization method such as the PSM pattern search method is established, which presents essential advantages that allow the construction of a clear methodology for tuning an NMPC with SIB T-S in combination with a CBMD applied to chemical processes;
- The tuning process of an NMPC is optimized utilizing the PSM, which, unlike other optimization methods, does not present randomness, helping the results to be consistently reliable, avoiding at the same time the stagnation in local minimums, performing an exhaustive search for a minimum value, reducing the number of tests in a significant way. Furthermore, control is obtained over the entire spectrum of values with the algorithm application without approximating the defined operating points, as most proposals for tuning these control strategies;
- The proposed optimization approach for the NMPC tuning with SIB T-S and CBMD can be a first step for the industry to adopt such techniques, which will allow at a given time to reach the implementation in the processes, as today happens with PID controllers that present acceptable behaviors, however, they can be supported by the alternatives of advanced control when it comes to optimizing the processes.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kasi, A.; Velagi, J.; Osmanovi, A. Design of NMPC-Based Framework for Mobile Robot Motion in Unstructured Environments. In Proceedings of the 2018 International Symposium ELMAR, Zadar, Croatia, 16–19 September 2018; pp. 183–186. [Google Scholar]
- Roy, K.; Bhati, J.; Paruya, S. Evaluating Successive Linearization in NMPC for Controlling Oscillations in Boiling Channel. In Proceedings of the 18th International Conference on Control, Automation and Systems (ICCAS), Institute of Control, Robotics and Systems–ICROS, PyeongChang, Korea, 17–20 October 2018; pp. 1260–1264. [Google Scholar]
- Gros, S.; Quirynen, R.; Diehl, M. An Improved Real-time Economic NMPC Scheme for Wind Turbine Control Using Spline-Interpolated Aerodynamic Coefficients. In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014. [Google Scholar] [CrossRef]
- Guo, N.; Lenzo, B.; Zhang, X.; Zou, Y.; Zhai, R.; Zhang, T. A Real-Time Nonlinear Model Predictive Controller for Yaw Motion Optimization of Distributed Drive Electric Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 4935–4946. [Google Scholar] [CrossRef] [Green Version]
- Herrera, J.; Ibeas, A.; Alcántara, S.; Vilanova, R. Identification and adaptive control of delayed unstable systems. In Proceedings of the 2010 IEEE International Symposium on Intelligent Control, Yokohama, Japan, 8–10 September 2010; pp. 767–772. [Google Scholar] [CrossRef]
- Lemonge, A.; Barbosa, H. A new adaptive penalty scheme for genetic algorithms. Inf. Sci. 2003, 3, 215–251. [Google Scholar]
- Schutte, J.; Groenwold, A. Sizing design of truss structures using particle swarms. Struct. Multidiscip. Optim. 2003, 25, 261–269. [Google Scholar] [CrossRef]
- Herrera, J.; Ibeas, A.; de la Sen, M. Identification and control of integrative MIMO systems using pattern search algorithms: An application to irrigation channels. Eng. Appl. Artif. Intell. 2013, 26, 334–346. [Google Scholar] [CrossRef]
- Alcantara Cano, S.; Ibeas Hernandez, A.; Aurelio Herrera, J.; Vilanova Arbos, R.; Pedret i Ferre, C. Multi-Model Smith Predictor Based Control of Multivariable Systems with Uncertain Bounded External Delays. IEEE Lat. Am. Trans. 2009, 7, 42–53. [Google Scholar] [CrossRef]
- Demaya, B.; Palm, R.; Boverie, S.; Titli, A. Multilevel qualitative and numerical optimization of fuzzy controller. In Proceedings of the 1995 IEEE International Conference on Fuzzy Systems, Yokohama, Japan, 20–24 March 1995; Volume 3, pp. 1149–1154. [Google Scholar] [CrossRef]
- Zangeneh, M.; Aghajari, E.; Forouzanfar, M. A Review on Optimization of Fuzzy Controller Parameters in Robotic Applications. IETE J. Res. 2020, 1–10. [Google Scholar] [CrossRef]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization and Machine Learning; Addison Wesley: Boston, MA, USA, 1989; pp. 95–99. ISBN 0201157675. [Google Scholar]
- Adeli, H.; Cheng, N.T. Integrated Genetic Algorithm for Optimization of Space Structures. J. Aerosp. Eng. 1993, 6, 315–328. [Google Scholar] [CrossRef]
- Norapat, N.; Bureerat, S. Simultaneous topology, shape and sizing optimisation of a three-dimensional slender truss tower using multiobjective evolutionary algorithms. Comput. Struct. 2011, 89, 2531–2538. [Google Scholar]
- Yang, J.; Chee Kiong, S. Structural Optimization by Genetic Algorithms with Tournament Selection. J. Comput. Civ. Eng. 1997, 11, 195–200. [Google Scholar] [CrossRef]
- Ebenau, G.; Rottschafer, J. An advanced evolutionary strategy with an adaptive penalty function for mixed-discrete structural optimisation. Adv. Eng. Softw. 2005, 36, 29–38. [Google Scholar] [CrossRef]
- Li, D.; Guo, W.; Wang, L.; Chen, M. Particle swarm optimization-based solution updating strategy for biogeography-based optimization. In Proceedings of the 2016 IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016; pp. 455–459. [Google Scholar] [CrossRef]
- Feng, C.S.; Cong, S.; Feng, X.Y. A new adaptive inertia weight strategy in particle swarn. In Proceedings of the 2007 IEEE Congress on Evolutionary Computation (CEC 2007), Singapore, 25–28 September 2007; pp. 4186–4190. [Google Scholar]
- Yasuda, K.; Yazawa, K. Parameter self-adjusting strategy for Particle Swarm Optimization. In Proceedings of the 2011 11th International Conference on Intelligent Systems Design and Applications, Cordoba, Spain, 22–24 November 2011; pp. 265–270. [Google Scholar] [CrossRef]
- Dai, Y.; Lou, Y.; Lu, X. A Task Scheduling Algorithm Based on Genetic Algorithm and Ant Colony Optimization Algorithm with Multi-QoS Constraints in Cloud Computing. In Proceedings of the 2015 7th International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2015; Volume 2, pp. 428–431. [Google Scholar] [CrossRef]
- Lee, M.G.; Yu, K.M. Dynamic Path Planning Based on an Improved Ant Colony Optimization with Genetic Algorithm. In Proceedings of the 2018 IEEE Asia-Pacific Conference on Antennas and Propagation (APCAP), Auckland, New Zealand, 5–8 August 2018; pp. 1–2. [Google Scholar]
- Camp, C.; Barron, J. Design of Space Trusses Using Ant Colony Optimization. J. Struct. Eng. 2004, 130, 741–751. [Google Scholar] [CrossRef]
- Sonmez, M. Artificial Bee Colony algorithm for optimization of truss structures. Appl. Soft Comput. 2011, 11, 2406–2418. [Google Scholar] [CrossRef]
- Xu, F.; Chen, H.; Gong, X.; Mei, Q. Fast Nonlinear Model Predictive Control on FPGA Using Particle Swarm Optimization. IEEE Trans. Ind. Electron. 2016, 63, 310–321. [Google Scholar] [CrossRef]
- Hernandez, E.; Castillo, O.; Soria, J. Optimization of fuzzy controllers for autonomous mobile robots using the grey wolf optimizer. In Proceedings of the 2019 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), New Orleans, LA, USA, 23–26 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Martínez, G.E.; Melin, P.; Castillo, O. A new approach for an intuitionistic fuzzy Sugeno integral for decision making. Notes Intuit. Fuzzy Sets 2019, 25, 41–52. [Google Scholar] [CrossRef] [Green Version]
- Ontiveros-Robles, E.; Melin, P.; Castillo, O.; Gonzalez, J. Design and FPGA Implementation of Real-Time Edge Detectors Based on Interval Type-2 Fuzzy Systems. J. Mult. Valued Log. Soft Comput. 2019, 33, 295–320. [Google Scholar]
- Castillo, O.; Valdez, F.; Soria, J.; Amador-Angulo, L.; Ochoa, P.; Peraza, C. Comparative study in fuzzy controller optimization using bee colony, differential evolution, and harmony search algorithms. Algorithms 2019, 12, 9. [Google Scholar] [CrossRef] [Green Version]
- Bogani, C.; Gasparo, M.G.; Papini, A. Generalized Pattern Search methods for a class of nonsmooth optimization problems with structure. J. Comput. Appl. Math. 2009, 229, 283–293. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Zhang, X. Generalized pattern search methods for linearly equality constrained optimization problems. ScienceDirect 2006, 181, 527–535. [Google Scholar] [CrossRef]
- Herrera, J.; Ibeas, A.; de la Sen, M.; Alcantara, M.; Serna-Garces, S. Identification and control of delayed siso systems through Pattern Search Methods. J. Frankl. Inst. B 2013, 350, 3128–3148. [Google Scholar] [CrossRef]
- Herrera, J.; Ibeas, A.; De La Sen, M.; Rivera, E.; Peláez, J. Generalized Pattern Search Methods for control of stable, unstable and integrating systems with unknown delay under step input. Math. Comput. Simul. 2015, 115, 37–48. [Google Scholar] [CrossRef]
- Alvarez, H.; Peña, M. Modelamiento de Sistemas de Inferencia Borrosa Tipo Takagi–Sugeno. Av. En Sist. Inform. 2004, 1, 1–11. [Google Scholar]
- Ibeas, A.; Vilanova, R.; Balaguer, P.; de la Sen, M. Multiple-model based intelligent control techniques for LTI systems with unknown external delays part I: Known rational component. Int. J. Innov. Comput. Inf. Control 2008, 4, 839–848. [Google Scholar]
- Suárez, A.M. Nueva Arquitectura de Control Predictivo Para Sistemas Dinámicos Nolineares Usando Redes Neuronales. Ph.D. Thesis, Tesis de Doctorado en Ciencias de la Ingeniería, Mención Automática, U. de Chile, Santiago, Chile, 1998. [Google Scholar]
- Espinosa, J.J.; Vandewalle, J. Predictive Control Using Fuzzy Models. In Advances in Soft Computing; Springer: London, UK, 1999; pp. 187–200. [Google Scholar] [CrossRef]
- Isaza, J.A. Evaluación de un Controlador Predictivo Basado en un Modelo Semifísico de Inferencia Borrosa Takagi-Sugeno Con Conjuntos Multdimensionales. Ph.D. Thesis, Universiad Nacional de Colombia, Manizalez, Colombia, 2012. [Google Scholar]
- Hinde, R.; Cooper, D.J. A Pattern-based Approach to Excitation Diagnostics for Adaptive Process Control. Chem. Eng. Sci 1994, 49, 1403–1415. [Google Scholar] [CrossRef]
- Shridhar, R.; Cooper, D.J. A Tuning Strategy for Unconstrained Multivariable Model Predictive Control. Ind. Eng. Chem. Res. 1998, 5885, 4003–4016. [Google Scholar] [CrossRef]
- Dougherty, D.; Cooper, D.J. A practical multiple model adaptive strategy for multivariable model predictive control. Eng. Pract. 2003, 11, 649–664. [Google Scholar] [CrossRef]
- Yamuna, K.; Unbehauen, H. Study of Predictive Controller Tuning Methods * IL. Automatica 1997, 33, 2243–2248. [Google Scholar]
- Srinivasarao, P.; Subbaiah, P. Tuning of Nonlinear Model Predictive for qwuadruple tank process. J. Theor. Appl. Inf. Technol. 2014, 67, 316–326. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Definition |
|---|---|
| It is the initial value of the rule output. | |
| Is the value, at the time k, of the input variable. | |
| Is the value, at time k, of the system output variable | |
| Is the value, n instants before k, of the input variable j | |
| Is the value, n moments before k, of the system output variable | |
| Is the value of the parameter associated with variable j in rule i. | |
| Is the value of the parameter associated with the delayed system output variable j times. | |
| Is the time it takes for a previous value of an input j to take effect in the output value of the system. | |
| Is the time it takes for the value of a previous system output to take effect in the value of the system output. | |
| Is the number of previous values of the input variable j, to be considered in the regressor; is the number of previous values of the system output, to be considered in the regressor. |
| Process Variable | Model Variable |
|---|---|
| Jacket flow | Manipulated variable |
| Reagent input flow F | Measured disturbance |
| reagent concentration | Controlled variable y |
| Reactor temperature T | First state |
| Jacket temperature | Second state |
| Parameter | Definition |
|---|---|
| Represents the future steps in which the prediction is made. Terms associated with the initial horizon | |
| Terms associated with the control horizon. | |
| Weighting weight associated with the error | |
| Weight of weight associated with change of action control | |
| Estimated output | |
| Reference value of the output | |
| Term associated with change of control action | |
| Term associated with the change of the predicted output |
| Magnitude | Unity | Range | Initial Condition |
|---|---|---|---|
| Lime milk flow | [10, 70] | 23.63 | |
| Sulfited juice flow | [500, 2100] | 1657.3 | |
| pH of lime milk | pH | [11.7, 12.2] | 12.33 |
| pH of sulphited juice | pH | [4.1, 5] | 4.4965 |
| Electric charge | C | ||
| Ultimate anion | [1.5776, 6.5704] | ||
| pH of the alkalized juice | pH | [5.7, 8.7] | 7.3481 |
| Regression Variables | Optimal Regressor Values |
|---|---|
| Lime milk flow | 1 |
| Sulfited juice flow | 1 |
| pH of alkalized juice pH | 1 |
| pH of lime milk | 1 |
| pH of sulphited juice | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Palacio-Morales, J.; Tobón, A.; Herrera, J. Optimization Based on Pattern Search Algorithm Applied to pH Non-Linear Control: Application to Alkalinization Process of Sugar Juice. Processes 2021, 9, 2283. https://0-doi-org.brum.beds.ac.uk/10.3390/pr9122283
Palacio-Morales J, Tobón A, Herrera J. Optimization Based on Pattern Search Algorithm Applied to pH Non-Linear Control: Application to Alkalinization Process of Sugar Juice. Processes. 2021; 9(12):2283. https://0-doi-org.brum.beds.ac.uk/10.3390/pr9122283
Chicago/Turabian StylePalacio-Morales, Jairo, Andrés Tobón, and Jorge Herrera. 2021. "Optimization Based on Pattern Search Algorithm Applied to pH Non-Linear Control: Application to Alkalinization Process of Sugar Juice" Processes 9, no. 12: 2283. https://0-doi-org.brum.beds.ac.uk/10.3390/pr9122283