
An Improved Transmissive Method of Stress Nondestructive Measurement Based on Inverse Magnetostrictive Theory for the Ferromagnetic Material

Abstract
:1. Introduction
2. Stress Detection Principle
2.1. The Detection Method Based on Inverse Magnetostrictive Theory
2.2. Basic Idea of Detection Method for the Internal Stress
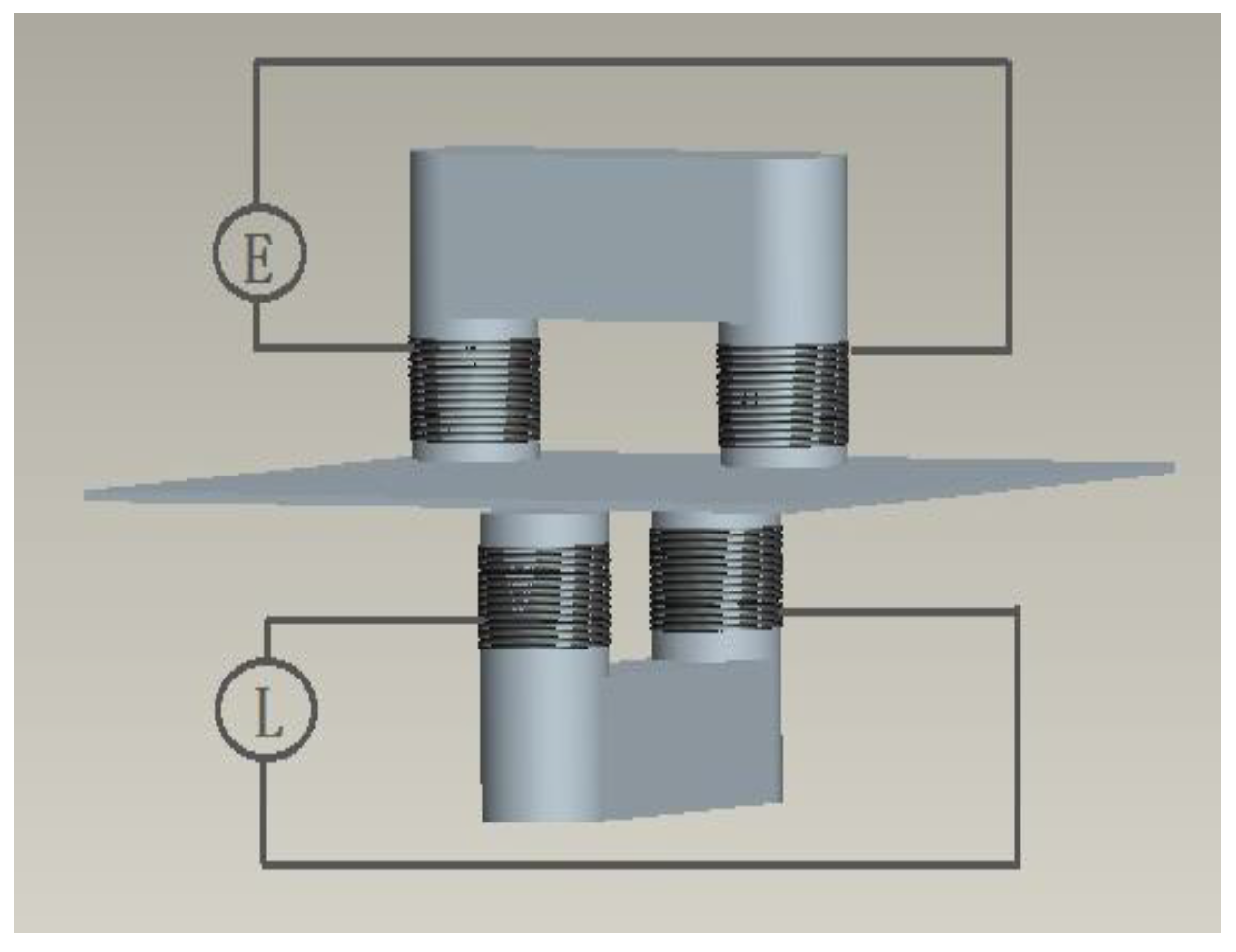
2.3. Specific Implementing Scheme of the Detection System
3. Magnetic Circuit Analysis
3.1. Inverse Magnetostrictive Effect of Ferromagnetic Materials
3.2. Magnetomechanical Model of the Permeability and Stress
3.3. Simulation Model of Finite Element
4. Results and Discussion
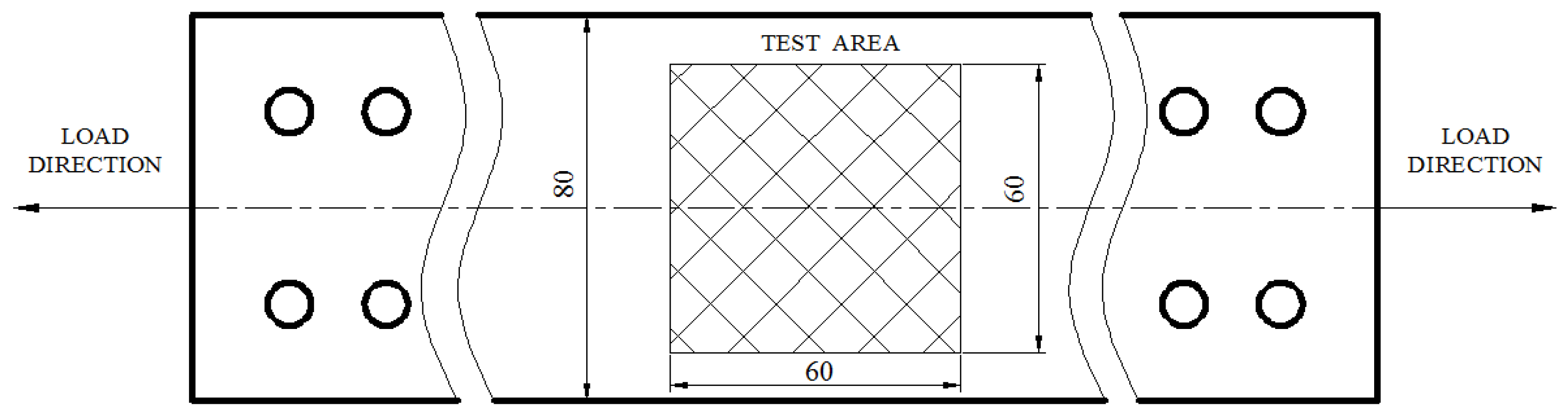
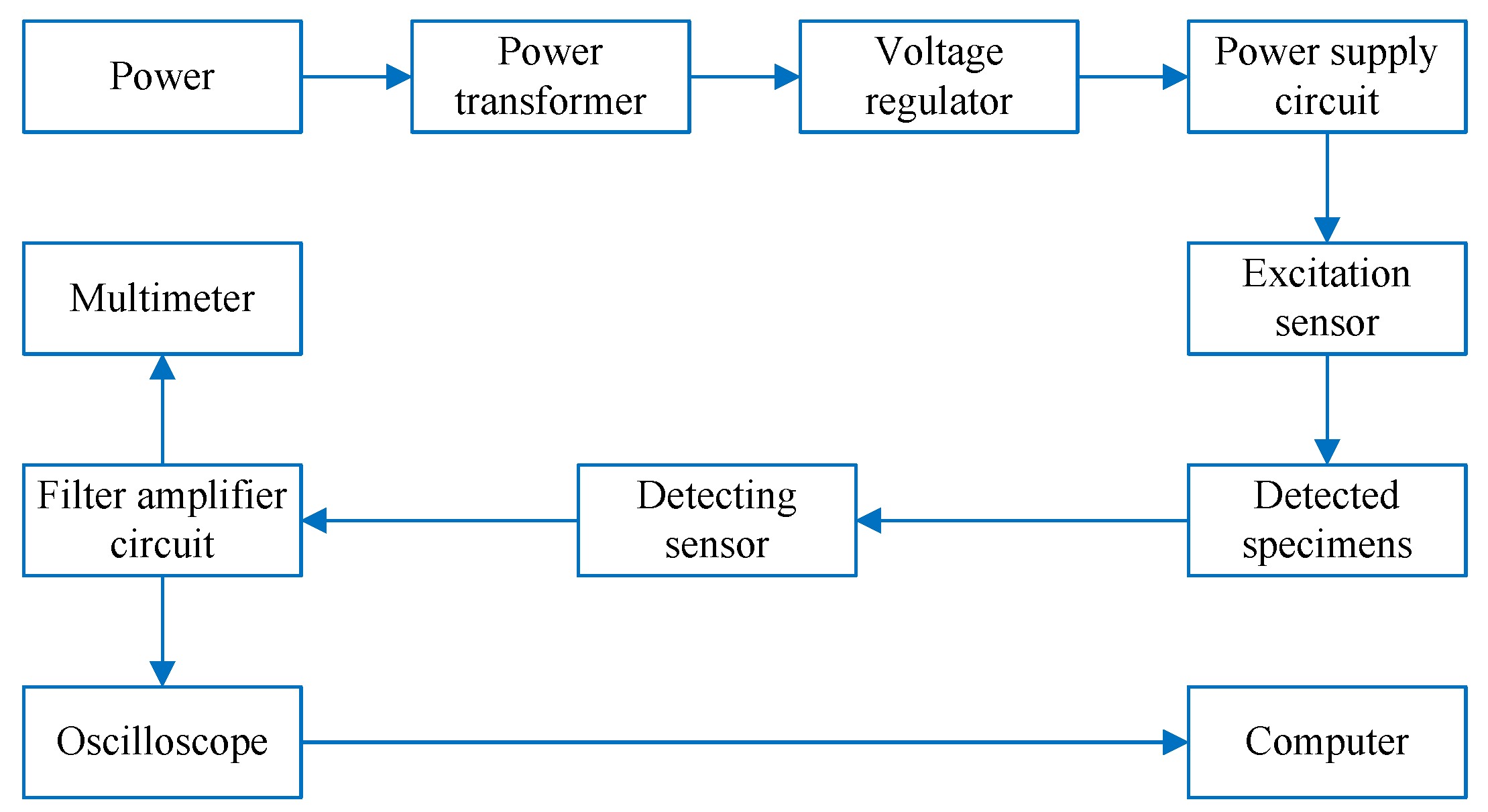
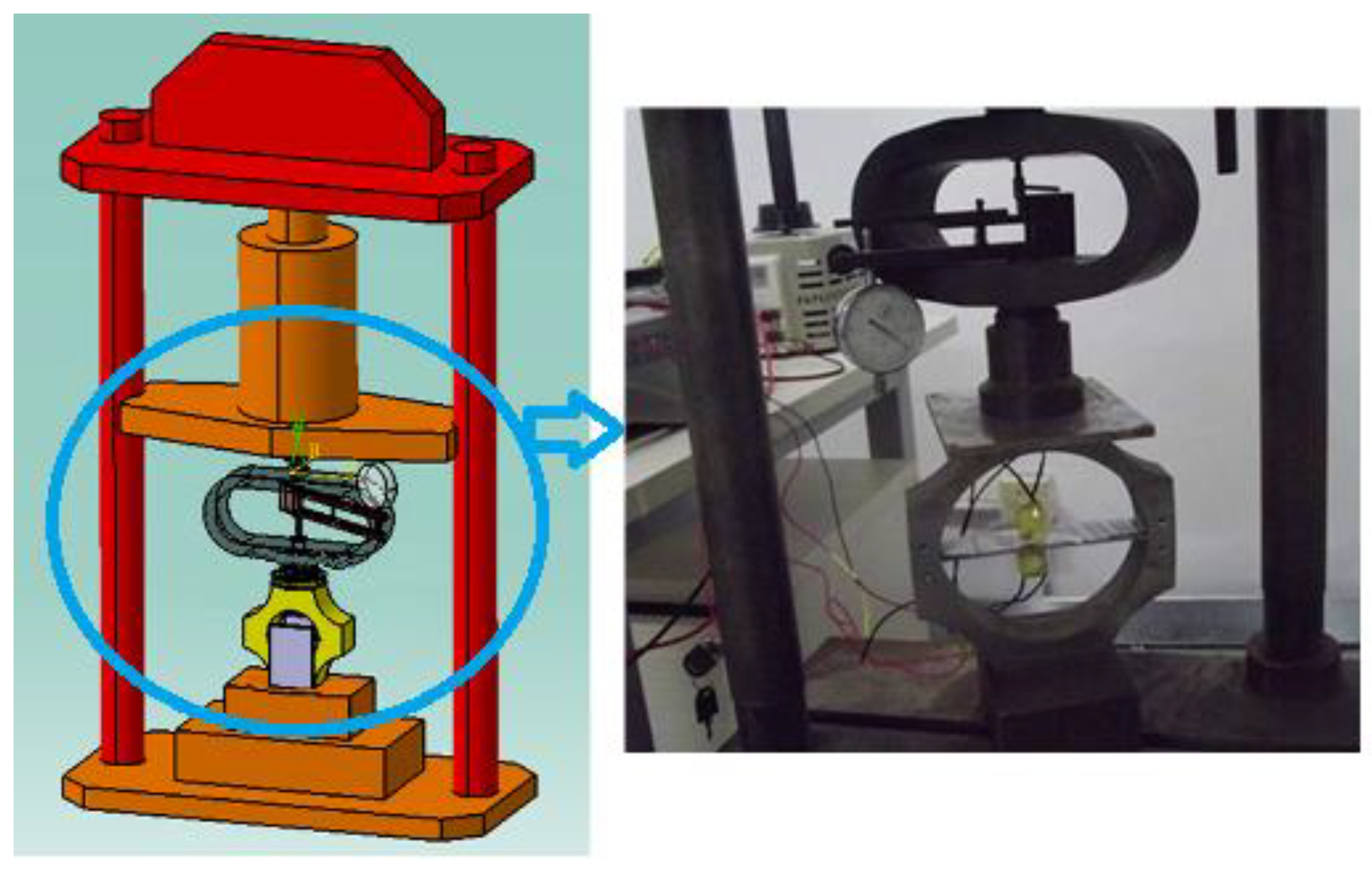
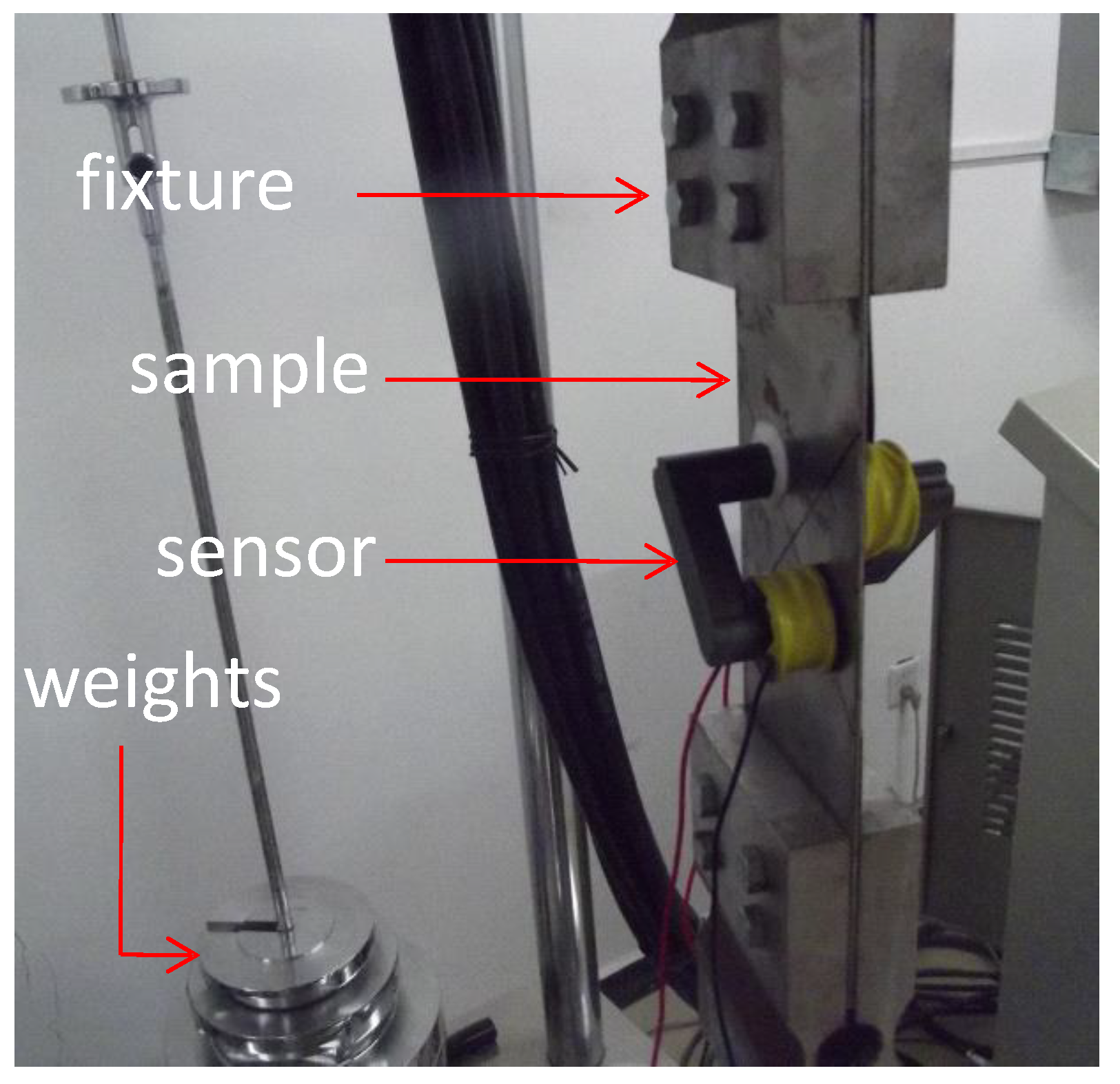
4.1. Specimen Preparation and Electromagnetic Testing System
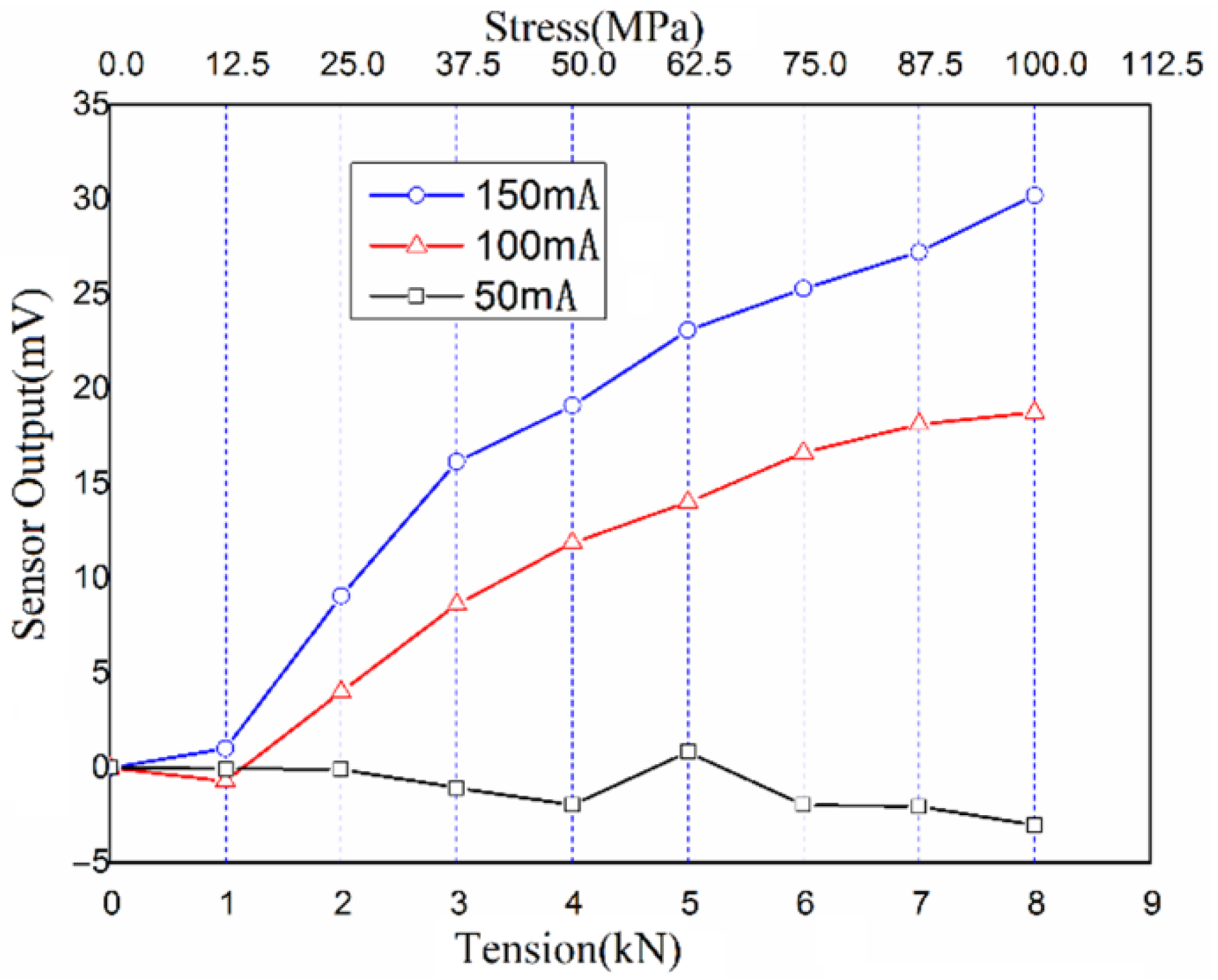
4.2. Qualitative Stress Measurement Using Electromagnetic Method
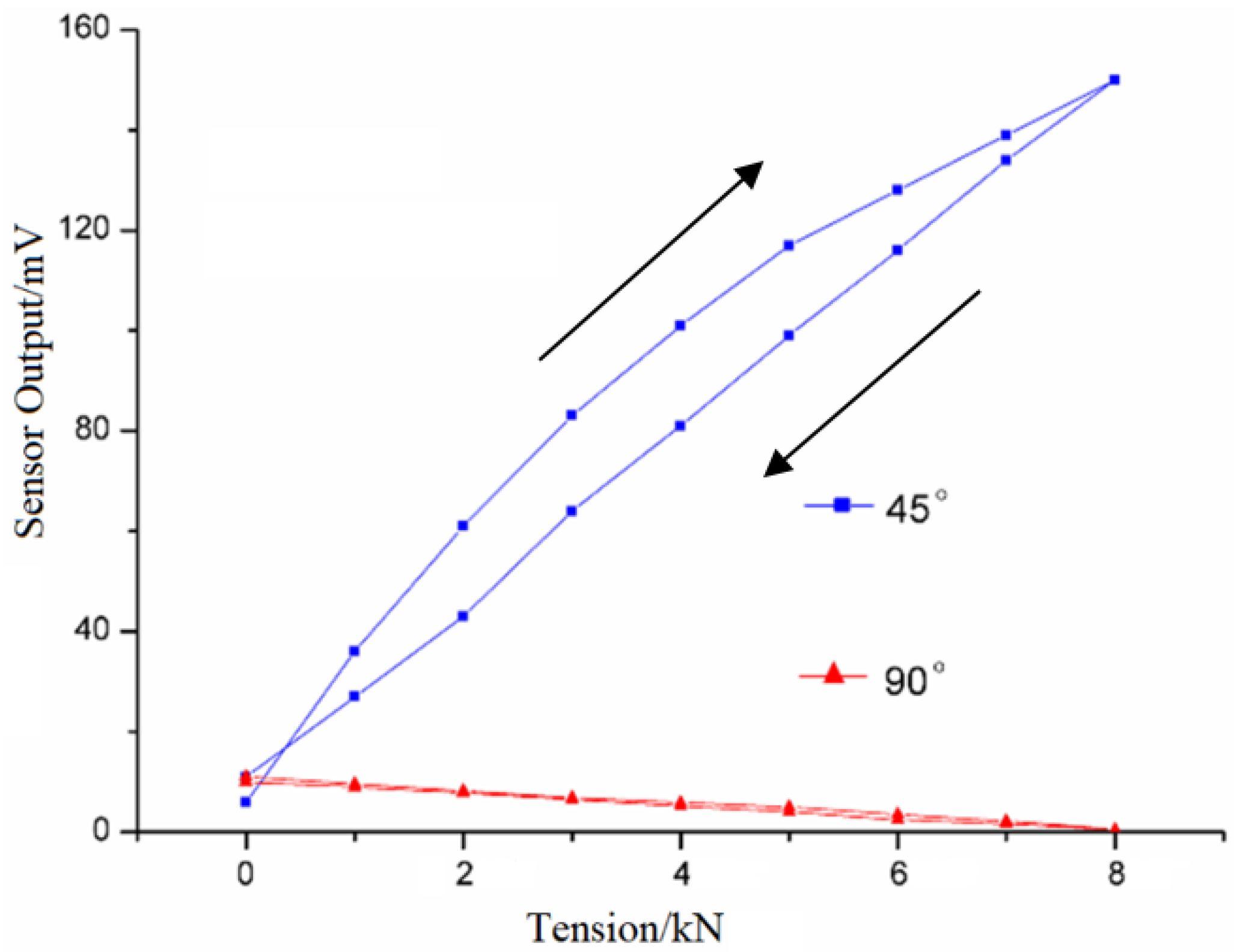
4.3. The Output Characteristic Changes of Sensor Voltage during the Process of Static Load-Unload under Different Experimental Conditions
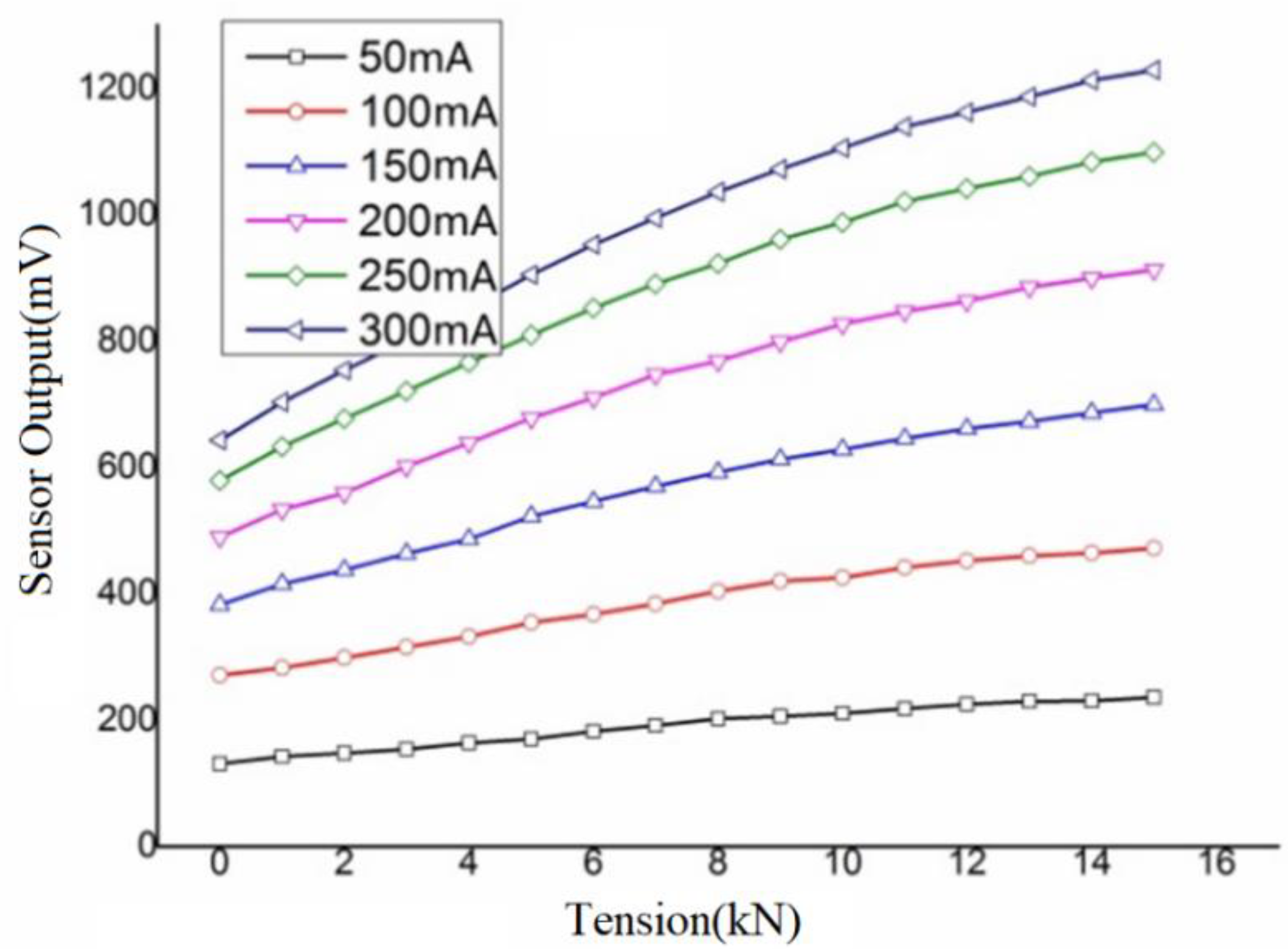
4.4. The Analysis of Sensor Parameters on the Experimental Results
4.5. Experiment on Fixed Material Loading and Unloading Correspond with Flux Changes
4.6. Experiment on Factors Affecting the Results of Air Gap Change between the Sensor and the Plate and Lift-Off Effect
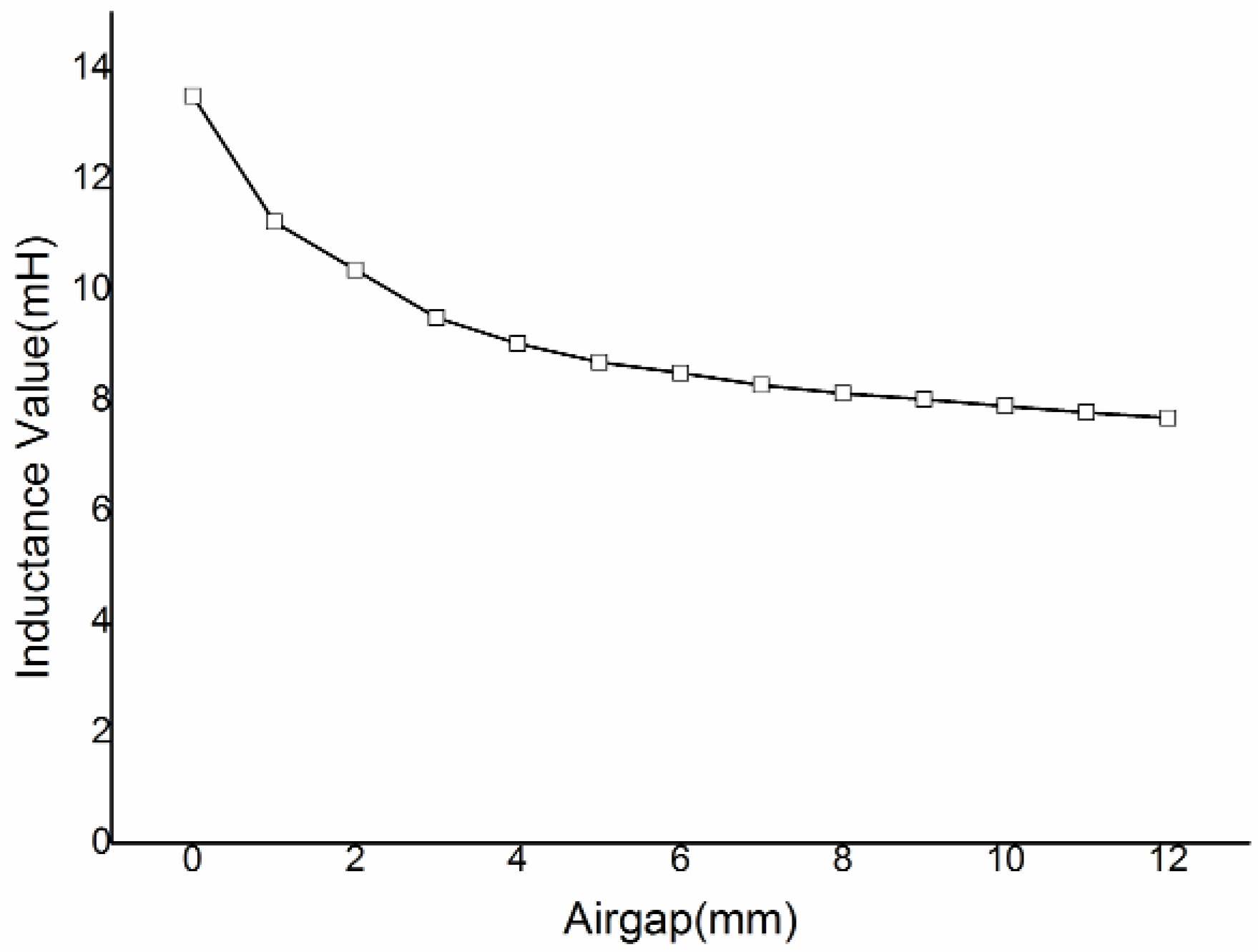
4.6.1. Experiment on Relationship of Excitation End Gap Change of Fixed Probe Spacing and Initial Response of Sensor
4.6.2. Experiment of the Corresponding Relationship between the Detection Signal and the Tensile Force under Different Air Gap Conditions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fischer, F.D.; Rammerstorfer, F.G.; Friedl, N. Residual Stress-Induced Center Wave Buckling of Rolled Strip Metal. J. Appl. Mech. 2003, 70, 84–90. [Google Scholar] [CrossRef]
- Borghesi, M.; Chiozzi, G. Shape Control through Tension Distribution Control in Cold Strip Rolling. In Proceedings of the International Conference on Steel Rolling, Tokyo, Japan, 29 September–4 October 1980. [Google Scholar]
- Guan, B.; Zang, Y.; Han, X. Cold-Rolled Strip Steel Stress Detection Technology Based on a Magnetoresistance Sensor and the Magnetoelastic Effect. Sensors 2018, 18, 1638. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Ding, S.; Gao, J. Adaptive Nonsingular Terminal Sliding Mode Backstepping Control for the Speed and Tension System of the Reversible Cold Strip Rolling Mill Using Disturbance Observers. IEEE Access 2019, 7, 171246–171259. [Google Scholar] [CrossRef]
- Zeng, J.W.; Zhang, Q.D.; Miao, C.X. Stress nondestructive testing of strip steel based on transmissive magnetoelastic effect. Chin. J. Eng. 2015, 37, 12–17. [Google Scholar]
- Jiles, D.C. Magnetic properties and microstructure of AISI 1000 series carbon steels. J. Phys. D Appl. Phys. 1988, 21, 1186. [Google Scholar] [CrossRef]
- Jiles, D.C.; Thoelke, J.B. Theory of ferromagnetic hysteresis: Determination of model parameters from experimental hysteresis loops. IEEE Trans. Magn. 1989, 25, 3928–3930. [Google Scholar] [CrossRef]
- Withers, P.J.; Turski, M.; Edwards, L.; Bouchard, P.J.; Buttle, D.J. Recent advances in residual stress measurement. Int. J. Press. Vessel. Pip. 2008, 85, 118–127. [Google Scholar] [CrossRef]
- Kalita, V.M.; Lozenko, A.F.; Ryabchenko, S.M. The role of defects in the formation of the multidomain state of easy-plane antiferromagnets with magnetoelastic interaction. J. Exp. Theor. Phys. 2004, 99, 1054–1064. [Google Scholar] [CrossRef]
- Stampfli, R.; Huynh, N.U.; Youssef, G. Long-term converse magnetoelectric response of actuated 1–3 multiferroic composite structures. Magnetochemistry 2021, 4, 55. [Google Scholar] [CrossRef]
- Augustyniak, B.; Degauque, J. Magneto-mechanical properties evolution of Fe-C alloy during precipitation process. Mater. Sci. Eng. A 2004, 37, 76–80. [Google Scholar] [CrossRef]
- Duan, Y.F.; Zhang, R.; Zhao, Y. Steel stress monitoring sensor based on elasto-magnetic effect and using magneto-electric laminated composite. J. Appl. Phys. 2012, 111, 07E516. [Google Scholar] [CrossRef] [Green Version]
- Jackiewicz, D.; Kachniarz, M.; Bieńkowski, A. Possibilities of application of the magnetoelastic effect for stress assessment in construction elements made of steel considering Rayleigh region. In Proceedings of the International Conference on Systems 2016, Warsaw, Poland, 20–21 May 2016; Springer: Cham, Switzerland, 2016; pp. 689–697. [Google Scholar]
- Sumitro, S.; Kurokawa, S.; Shimano, K. Monitoring based maintenance utilizing actual stress sensory technology. Smart Mater. Struct. 2005, 3, 68. [Google Scholar] [CrossRef]
- Chady, T.; Sikora, R.; Psuj, G.; Enokizono, M.; Todaka, T. Fusion of electromagnetic inspection methods for evaluation of stress-loaded steel samples. IEEE Trans. Magn. 2005, 41, 3721–3723. [Google Scholar] [CrossRef]
- Kwun, H.; Bartels, K.A. Magnetostrictive sensor technology and its applications. Ultrasonics 1998, 36, 171–178. [Google Scholar] [CrossRef]
- Wilson, J.W.; Gui, Y.T.; Simon, B. Residual magnetic field sensing for stress measurement. Sens. Actuators A Phys. 2006, 135, 381–387. [Google Scholar] [CrossRef]
- Nlebedim, I.C.; Hadimani, R.L.; Prozorov, R. Structural, magnetic, and magnetoelastic properties of magnesium substituted cobalt ferrite. J. Appl. Phys. 2013, 113, 8608. [Google Scholar] [CrossRef] [Green Version]
- Kachniarz, M.; Salach, J. Characterization of magnetoelastic properties of Ni-Zn ferrite in wide range of magnetizing fields for stress sensing applications. Measurement 2020, 168, 108301. [Google Scholar] [CrossRef]
- Grimes, C.A.; Roy, S.C.; Rani, S. Theory, Instrumentation and Applications of Magnetoelastic Resonance Sensors: A Review. Sensors 2011, 11, 2809–2844. [Google Scholar] [CrossRef]
- Tang, J.; Green, S.R.; Gian, Y.B. Miniature Wireless Magnetoelastic Resonant Motor with Frequency Selectable Bidirectional Rotation. J. Microelectromechanical Syst. 2013, 22, 730–738. [Google Scholar] [CrossRef]
- Wen, X.Q.; Ning, X.M.; Zhang, Y.Z. Development of technology and application for magnetostrictive sensor. J. Transducer Technol. 2003, 22, 1–4. [Google Scholar]
- Bulte, D.; Langman, R.A. Origins of the magnetomechanical effect. J. Magn. Magn. Mater. 2002, 251, 229–243. [Google Scholar] [CrossRef]
- Bulte, D. The Pursuit of Hysteresis in Polycrystalline Ferromagnetic Materials under Stress. IEEE Trans. Magn. 2009, 45, 83–87. [Google Scholar] [CrossRef]
- Jiles, D.C.; Atherton, D.L. Theory of the magnetization process in ferromagnets and its application to the magnetomechanical effect. J. Phys. D Appl. Phys. 2000, 17, 1265–1281. [Google Scholar] [CrossRef]
- Atherton, D.L.; Jiles, D.C. Effects of stress on magnetization. NDT Int. 1986, 19, 15–19. [Google Scholar] [CrossRef]
- Liorzou, F.; Phelps, B.; Atherton, D.L. Macroscopic models of magnetization. IEEE Trans. Magn. 2000, 36, 418–428. [Google Scholar] [CrossRef]
- Langman, R. Some comparisons between the measurement of stress in mild steel by means of Barkhausen noise and rotation of magnetization. NDT Int. 1987, 20, 93–99. [Google Scholar] [CrossRef]
- Langman, R. Measurement of mechanical stress in mild steel by means of rotation of magnetic field strength. NDT Int. 1981, 14, 255–262. [Google Scholar] [CrossRef]
- Mohammed, S. Constitutive relations for magnetomechanical hysteresis in ferromagnetic materials. Int. J. Eng. Sci. 1995, 33, 1233–1249. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Turns | Cross-Section Shape | Material | Current Source |
|---|---|---|---|
| 200 | Rectangular | Standard Copper (Permeability = 1 Mu; Conductivity = 5.8 × 107 S/m) | 0.5A (Strand; Total) |
| Width (mm) | Thickness (mm) | Cross-Section Shape | Material |
|---|---|---|---|
| 80 | 2 | Rectangular | Iron(Permeability = 4000, having B-H curve) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, J.; Xu, Y.; Liang, S.; Long, Z. An Improved Transmissive Method of Stress Nondestructive Measurement Based on Inverse Magnetostrictive Theory for the Ferromagnetic Material. Magnetochemistry 2021, 7, 106. https://0-doi-org.brum.beds.ac.uk/10.3390/magnetochemistry7070106
Zeng J, Xu Y, Liang S, Long Z. An Improved Transmissive Method of Stress Nondestructive Measurement Based on Inverse Magnetostrictive Theory for the Ferromagnetic Material. Magnetochemistry. 2021; 7(7):106. https://0-doi-org.brum.beds.ac.uk/10.3390/magnetochemistry7070106
Chicago/Turabian StyleZeng, Jiewei, Yunsong Xu, Shi Liang, and Zhiqiang Long. 2021. "An Improved Transmissive Method of Stress Nondestructive Measurement Based on Inverse Magnetostrictive Theory for the Ferromagnetic Material" Magnetochemistry 7, no. 7: 106. https://0-doi-org.brum.beds.ac.uk/10.3390/magnetochemistry7070106