Intent to Adopt Location Sharing for Logging Safety Applications


1
Department of Forest, Rangeland, and Fire Sciences, College of Natural Resources, University of Idaho, Moscow, ID 83844, USA
2
Office of Grant and Project Development, College of Agricultural and Life Sciences, University of Idaho, Moscow, ID 83844, USA
3
Department of Natural Resources and Society, College of Natural Resources, University of Idaho, Moscow, ID 83844, USA
*
Author to whom correspondence should be addressed.
Safety 2019, 5(1), 7; https://0-doi-org.brum.beds.ac.uk/10.3390/safety5010007
Submission received: 7 November 2018
/
Revised: 15 January 2019
/
Accepted: 15 January 2019
/
Published: 24 January 2019
Abstract
:Logging entails work in remote areas with multiple hazards and consistently ranks among the most fatal occupations in the United States. Location-sharing (LS) devices that enable users to communicate geographic positions to others have been suggested as a technological approach to improving workplace safety on logging operations. This study investigated logger intent to adopt LS-based safety practices. Employing concepts from the Theory of Planned Behavior, including intent, attitude, norms, and perceived behavioral control, we surveyed Idaho loggers at three logger training programs. We evaluated their likelihood of using LS devices on logging operations and examined factors associated with LS adoption. The results showed that Idaho loggers are likely to use (a) automatic position updates for hand fallers, (b) LS devices on all ground workers and heavy equipment, and (c) LS technology for general situational awareness. Participants also recognized specific safety benefits to LS, particularly for emergency situations, such as communicating the need for help or expediting the discovery of injured coworkers. Our findings support further development of LS technology for logging safety, particularly devices and applications that facilitate injury response for isolated workers, such as hand fallers.
1. Introduction
Location-sharing (LS) devices enable individuals to send geographic positioning information to others. Using the Global Navigation Satellite System (GNSS), devices can triangulate user locations anywhere on Earth, including in remote environments. Known coordinates can then be shared via cellular infrastructure, satellites, or radio frequency (RF) transmissions. Communication may be one-way or two-way. For example, SPOT receivers (SPOT LLC, Covington, LA, USA) and Garmin InReach devices (Garmin Ltd., Olathe, KS, USA) designed for emergency situations allow users to send text messages to members of a contact list, or to signal an alert with coordinate specifications to the GEOS International Emergency Response Coordination Center (IERCC) [1,2]. Alternatively, radio-based devices from manufacturers like Garmin, Raveon (Raveon Technologies Corp., San Diego, CA, USA), or TrellisWare (TrellisWare Technologies Inc., San Diego, CA, USA) enable local exchanges of user coordinates between two or more devices [3,4,5]. Smartphone-based RF receivers, such as Beartooth (Beartooth Radio Inc., Bozeman, MT, USA) and goTenna (goTenna, New York, NY, USA), also enable two-way LS using a Bluetooth-connected smartphone as the user interface for LS and communication outside of cellular networks [6,7]. These devices use the GNSS chip in the smartphone to determine user locations, and then transmit that data to other phones through RF.
LS range and features vary by device. Some units may incorporate help alerts, either to emergency response services (SPOT, Garmin inReach) or to other, local users (goTenna, Raveon Atlas PT). Automatic position updates (Raveon Atlas PT, TrellisWare Ghost, inReach, SPOT) share an individual’s location at regular intervals, and devices with programmable virtual boundaries, known as geofences, can notify users when someone has moved into a pre-defined area. Many devices also have messaging and data capabilities, such as text, voice, images, or videos, depending on their bandwidth. The radius of communication depends on the signal type and receiver quality. Devices with satellite-based signal transmission (e.g., SPOT, Garmin inReach) can send positioning data anywhere on the globe covered by available satellite networks; whereas, RF-based communications are limited to local networks, with distances of 2–16 km (1–10 miles) typical for consumer devices [7,8] and ranges greater than 32 km (20 miles) possible with professional-grade units [5]. Some LS devices (Beartooth, goTenna, TrellisWare Ghost) increase RF range with mesh networking, in which each unit can serve as an intermediate relay node, similar to a conventional radio repeater, for data delivery.
With its off-the-grid capabilities, LS technology could be used on logging operations to improve workplace safety in remote areas [9]. Logging regularly ranks among the most dangerous professions in the United States, according to both the Bureau of Labor Statistics (BLS) and the National Institute for Occupational Safety and Health (NIOSH) National Traumatic Occupational Fatalities Surveillance System [10,11]. According to the BLS Census of Fatal Occupational Injuries annual report, loggers faced the highest civilian fatality rate of any occupation in 2015, with 132.7 deaths per 100,000 full-time employees [12], a 20% increase from the previous year, when loggers also had the highest rate [13]. Many logging fatalities have occurred in the Pacific Northwest region of the United States, which includes the states of Idaho (three deaths from 2011–2015), Oregon (33 deaths from 2011–2015), and Washington (20 deaths from 2011–2015) [14]. In 2014, one-third of US logger fatalities occurred in these three states [13,14]. Incident details cataloguing the primary causes of injury have been reported by the BLS as well as studies analyzing Worker’s Compensation claims [15,16,17,18]. Loggers are often fatally injured when struck by other objects, primarily trees, logs, and limbs, followed by machinery [12,15,16]. Such fatal injuries are more likely on partially-mechanized operations, which rely on ground workers rather than machines for manual tree felling and possibly also delimbing [15]. While mechanization increases protection from limbs and logs for machine operators enclosed in a cab, exposure risk is increased for ground crew who work alongside these machines, especially for individuals at the landing who may come in contact with moving logs as well as loaders, skidders, and log trucks [15,18,19,20]. Fatal injury risks are also high for hand fallers, who use chainsaws to cut trees on terrain generally too steep for machinery other than emerging cable-assisted (tethered) systems. Fallers work in relatively isolated conditions but still face mechanical and environmental hazards, such as chainsaws and falling trees or limbs [15,16,18,21]. Due to the distance between fallers and other co-workers, injury occurrence and location may not be immediately known.
LS technology could increase team situational awareness on logging operations and facilitate both injury prevention and response. For instance, LS devices with help alerts would allow isolated individuals to notify coworkers or off-site response services of an emergency. In cases of incapacitation, automatic position updates may help coworkers notice when an individual might require aide. In both cases, geographic coordinates are shared to assist response efforts. Automatic position updates used in conjunction with geofences could also augment awareness of worker positions relative to hazardous areas or equipment for injury prevention. For example, recently-introduced LS systems targeted toward the cable logging industry in New Zealand enable yarder operators to check the positions of crew on the ground and receive alerts when those workers have moved into dangerous work spaces (Logsafe GPS Monitoring, Blockhouse Bay, Auckland, New Zealand) [22].
Recent research has explored LS-based solutions for improving logging safety, assessing field operation of devices [23,24,25] and evaluating logger perceptions of the technology [26]. In a study by Newman et al., interviewed Idaho loggers recognized the value of LS but also proposed several potential drawbacks. They cited concerns over privacy, dependence, distraction, high learning curves, and risk behavior [26]. Loggers also suggested that devices may simply not be used even if available. The extent to which LS may be used on logging operations has not been quantified previously; thus, in the present study we aimed to investigate the likelihood that Idaho loggers will adopt LS-based practices and thereby refine our understanding of location sharing’s role in logging safety.
To guide our assessment of self-predicted LS adoption, we employed the Theory of Planned Behavior (TPB), a psychological theory that emphasizes the role of intention in human behavior. According to the TPB, and its predecessor the Theory of Reasoned Behavior, intent drives individuals to exert more effort into completion of an action, increasing the likelihood a behavior will occur [27]. Surveys employing the TPB typically phrase intention as I will, I expect, or I intend [28,29]. Intention is influenced by three factors: attitude, subjective norms, and perceived behavioral control. First, attitude encompasses beliefs concerning a behavior [27]. TPB studies evaluate attitude by identifying potential behavioral outcomes, such as likelihood of occurrence, and assessing outcome value or desirability [28,29,30]. Value may be instrumental, based on qualities like usefulness, or may be experiential, such as pleasantness [29]. The second factor, subjective norms, accounts for the social pressure one feels to behave a certain way [27]. Normative pressure in the TPB can be either injunctive, in which an individual is motivated by what others think should be done, or descriptive, in which one is influenced by what others do [28,29,30]. The last factor, control, was originally defined by Ajzen (1991) as either self-efficacy or perceived behavioral control, which he deemed as interchangeable concepts [27]. Consequent analyses and discussions have distinguished between the internal factors that influence self-efficacy (i.e., difficulty) and the external forces of perceived behavioral control (i.e., how much the behavior is up to the individual) [28,31]. The TPB has been used widely to understand and explain variance in behavior [31], especially for health and safety [32,33,34,35]. It has also been employed as a framework for questionnaires addressing occupational health behaviors, guiding surveys on safe lifting [36], farmers’ self-protective behaviors [37], miners’ use of hearing protection [38], and safety violations by aircraft maintenance workers [39].
We surveyed Idaho loggers at three accreditation renewal workshops as part of the Logger Education to Advance Professionalism (LEAP) program. Our objectives were to evaluate whether Idaho loggers are likely to adopt LS-based safety practices on logging operations and to elucidate the nuances associated with adoption of these behaviors. The survey encompassed three general themes: (a) background information on participants (e.g., demographic data, logging experience, smartphone ownership and use, prior use of LS, and general safety opinions), (b) formal TPB assessment of intent, attitude, descriptive norms, and perceived behavioral control, formatted according to suggested guidelines, and (c) additional LS adoption elements. This latter component included, for example, possible ways that LS might be used and potential reasons for disuse. Within these broader topics, we tested specific hypotheses to assess (1) whether loggers believe that finding new ways to improve safety on logging operations is important, (2) whether loggers are likely to use LS, and (3) whether intent to adopt LS behaviors varies by age, phone use, or the TPB attributes (attitude, norms, and control).
2. Materials and Methods
2.1. Survey Population and Administration
This study and associated materials were reviewed and approved by the University of Idaho Institutional Review Board (project 18–037) on 28 February 2018. It was certified as exempt under category 2 at 45 CFR 46.1010(b)(2).
Through a paper survey, we assessed logger intent to adopt specific LS safety practices. LS safety applications are still an emerging concept in forest operations, so previous exposure to this technology was expected to be minimal or nonexistent in the general population of Idaho loggers. To ensure quality responses, we required participants to have appropriate and relevant background information for answering specific questions on LS devices, capabilities, and applications. Thus, we defined our population as all professionally certified loggers in the Idaho Logger Education to Advance Professionalism (LEAP) program and surveyed a convenience sample that included all certified loggers attending the “Location Sharing for Logging Safety” presentation at the 2018 LEAP update meetings [40,41]. The LEAP update, administered by University of Idaho Extension, is an annual, one-day workshop offering in-depth coverage of forestry concepts for loggers and logging contractors. Participation in the update meeting satisfies training requirements necessary to maintain Pro-Logger accreditation in the state [42]. In 2018, the update was offered at three Idaho locations: Lewiston (March 20), Coeur d’Alene (March 21), and Sandpoint (March 22). Pro-Logger accreditation is a voluntary program administered by Idaho’s Associated Logging Contractors (ALC) for professional timber harvesters, including logging contractors, loggers, forest owners, and forest products companies [43]. It indicates the continuing completion of advanced professional and safety training.
At the beginning of each LEAP presentation on LS, we distributed the survey to all attendees, along with a consent letter, LS informational handout, and raffle ticket. We explained the survey’s purpose and procedure and informed attendees of the opportunity to win a scale model log truck through a raffle drawing at the conclusion of the presentation. Completion of the survey was integrated into the presentation, such that the presenter indicated when to answer specific questions and provided relevant content and explanation. Immediately following the LS presentation, we announced the winner of the log truck and then collected all questionnaires, including both blank and completed copies.
In designing the LEAP presentation, the authors carefully considered the possibility of social desirability bias in survey response and thus attempted to present material in a factual, neutral manner. Due to potential negative biases arising from unease or hostility toward mandatory, safety regulation [26,44,45], we avoided language in the LEAP presentation and survey that would imply necessity of LS use. This allowed us to assess self-predicted adoption as a voluntary action.
2.2. Survey Instrument
The survey instrument was designed using best practices outlined in Dillman et al. [46]. The survey consisted of close-ended questions and measures designed to (a) establish participant background information, (b) complete formal TPB assessment, and (c) explore additional elements related to future LS adoption (see Appendix A for complete survey). Questions are described in the methods as they appeared to participants at the logger workshops and are re-organized by theme in the results.
The first four questions were presented in a forced-choice format with three answer options: “yes”, “no”, and “unsure”. Question one addressed previous use of LS devices, and questions two through three requested participants’ opinions on the ability of various types of LS devices and features to improve logging safety. Since LS is a general concept that can apply to several different technologies, these two questions allowed us to understand the specific ways in which LS might be used by loggers. In question four, we asked participants to indicate privacy concerns about real-time locations being shared with “coworkers at the jobsite” and “supervisors or others at a remote office or shop” in order to better define the circumstances under which shared positioning would be acceptable to loggers. The topic of reach, or who receives positioning information (Figure 1), was included based on worker monitoring concerns voiced by Idaho loggers in the Newman et al. study [26]. Due to the availability of lower-cost LS receivers using smartphones as a communication conduit (goTenna, Beartooth), we asked loggers if they own a smartphone (“yes” or “no”), and, if so, how often they carry the phone with them while working on logging operations (“always”, “often”, “rarely”, or “never”). Other questions in the first half of the survey addressed concerns about carrying an extra device (3-point, unipolar scale) and priorities for the focus of LS technology. The latter question asked participants to rank four safety applications, from most important (1) to least important (4): “contacting off-site emergency response”, “finding injured workers quickly”, “alerting coworkers when someone needs helps”, and “preventing accidents on the jobsite”. We also asked loggers about the importance of finding new ways to improve safety on logging operations, using a 5-point scale from “very unimportant” to “very important”.
Several questions were framed according to the TPB (Figure 2), with attribute measurement and scaling based on guidelines suggested by Francis et al. [28] and Montaño and Kasprzyk [34]. Since the analytic power of the TPB is generally higher the more detailed the behavior being assessed [30], we defined three, specific LS practices (behaviors) in our survey that corresponded to draft recommendations being considered for use of LS in logging safety: (1) “using personal, location-sharing devices (PLDs) with local, automatic location sharing for hand fallers”, (2) “using PLDs on all ground workers and heavy equipment”, (3) “using GPS-based PLDs and geofences for general situational awareness”. Endsley defined situational awareness as knowledge about the state of dynamic environments [47]. It encompasses (a) perception of elements (e.g., attaining information on people, equipment, raw materials, and environmental features), (b) comprehension of how perceptions are relevant to completing tasks, and (c) projection of the future status of elements [47]. In the context of logging safety, LS could increase team situational awareness by enhancing loggers’ ability to monitor events across an operation and anticipate potentially injurious situations.
Table 1 summarizes how each TPB attribute (intent, attitude, norms, control) was scaled and measured. Two seven-part questions applied indirect measures of instrumental attitude, asking participants to first select outcome likelihood (“very unlikely”, “somewhat unlikely”, “unsure”, “somewhat likely”, “very likely”) and then outcome value (“very bad”, “somewhat bad”, “neutral”, “somewhat good”, “very good”). Outcomes were based on logger interviews identifying potential advantages and disadvantages of LS on logging operations [26]. They included (1) “improving overall workplace safety”, (2) “developing a dependence on the technology”, (3) “finding injured coworkers faster”, (4) “causing distraction from other work activities”, (5) “knowing when coworkers might need help”, (6) “causing workers to feel like they are being watched or monitored”, and (7) “knowing when coworkers are in safe or unsafe areas”. To reduce respondent burden, the three behaviors (LS safety practices) were consolidated into an all-encompassing behavior of “using PLDs on logging operations” for measures of attitude. Referencing a single behavior allowed us to limit the number of question permutations and avoid requiring participants to discern between unfamiliar behaviors with nearly homogenous outcomes. We measured intention as the perceived likelihood (5-point Likert scale) of using PLDs in each of the ways indicated by the behaviors. Since we evaluated occupational behaviors in which individual actions and decisions are interconnected with the actions and decisions of others, including co-workers, other employees, and supervisors, our survey measured perceived behavioral control instead of self-efficacy, with one question addressing degree of influence on whether PLDs are used (“a lot”, “some”, or “none”). Lastly, we assessed descriptive norms directly by asking survey participants to indicate the likelihood, from “very unlikely” to “very likely” (5-point Likert scale) that each of the three behaviors would be performed by other loggers.
Although TPB questionnaires typically employ 7-point scales, 5-point scales are occasionally used as well [28]. To reduce cognitive burden without sacrificing survey content, we used 5-point scales for bipolar measures (attitude, norms, intent) and a 3-point scale for the unipolar question on control. High cognitive burden was anticipated for this survey due to the inevitable complexity involved with requiring participants to evaluate technology applications with limited processing time between introduction to the concepts and assessment.
The last four questions of the survey covered demographic and employment information, including age, years of logging experience, job title (“Hand faller”, “Chaser/Hooker”, “Equipment Operator”, “Truck Driver”, “Owner”, “Other—please specify”), and operation type (“Mechanized ground-based logging”, “Partially mechanized ground-based logging”, “Cable logging”, “Other—please specify”). Multiple selections could be designated for job title and operation type.
2.3. Data Analysis
Surveys from the three LEAP update locations were pooled for data summaries and statistical analyses. In order to address possible geographic biases among locations, we first used Analysis of Variance (ANOVA) to compare a subset of survey questions across workshops: LS privacy concerns, smartphones at work, importance of new safety solutions, intent to adopt LS, and age. All ANOVA tests were insignificant, indicating no response variation across location, except for one question with a p-value of 0.0009 (intent to use PLDs on all ground workers and heavy equipment). We believe this result was an artifact of the data and assumed for the purposes of subsequent analysis that there were no within-group differences for the three locations.
We report responses to each survey question as percentages in the Results section. The only question not represented in the final results is the ranking of LS uses, as only 152 respondents (about 54%) answered the question uniformly. We also report Cronbach’s alpha for select sets of survey questions to measure internal consistency. The higher the Cronbach’s alpha value, the more likely compared questions measure the same underlying concept.
We completed statistical analysis for several specific questions using R open source statistical computing software (Version 1.0.44, 2016, The R Foundation, Vienna, Austria) [48]. First, we analyzed the question on the importance of finding new ways to improve safety on logging operations. Responses were recoded numerically as 1, 2, 3, 4, and 5 for “very unimportant”, “somewhat unimportant”, “neutral”, “somewhat important”, and “very important”, respectively. We compared median response scores using the Wilcoxon Sign-Rank Test (wilcox.test function) and the non-parametric Sign Test (SignTest function). We applied both tests because Wilcoxon Sign-Rank assumes that medians are symmetrically distributed, an assumption only loosely met with our data set; whereas the comparable but less powerful Sign Test does not require a symmetrical distribution. With both methods, we tested the null hypothesis that the median response was less than or equal to 3 (“neutral”), or that loggers do not place a high importance on new logging safety solutions.
To determine the likelihood that loggers will adopt the three LS safety practices, we again used Wilcoxon Sign-Rank and Sign procedures, testing the null hypothesis that the median intent score is less than or equal to 3, where 1 corresponds to “very unlikely”, 2 is “somewhat unlikely”, 3 is “unsure”, 4 is “somewhat likely”, and 5 is “very likely”. Additionally, we used two-way ordinal regression with Cumulative Link Models (clm and Anova functions in R) to determine (a) if intent varies by age or the frequency with which loggers carry smartphones on logging operations, and (b) if there is an interaction effect between the two independent variables. We assumed that older loggers would be less experienced and comfortable with technology generally and thus would be less likely to adopt technologically-based safety practices in the workplace. We also assumed that individuals who more frequently carry a smartphone at work would be more accustomed to regular technology use and thus more likely to adopt LS. Age and smartphone frequency were recoded numerically in the data set, with 1, 2, 3, 4, and 5 representing age categories of “less than 20 years”, “20–29 years”, “30–39 years”, “40–49 years”, and “50 or more years”, respectively, and frequency values of “never”, “rarely”, “often”, and “always” corresponding to 1, 2, 3, and 4, respectively. The sample for smartphone carriers included responses for only those individuals that indicated “yes” to a previous question on smartphone ownership; individuals who did not own smartphones were treated as NA in R and omitted from the model.
Regression analysis is frequently employed in TPB studies to assess if attitude, norms, or control correlate with intent [33,35,37,49]. Since our data set did not meet all the assumptions of linear or multiple regression, we used non-parametric ordinal regression, which is appropriate for ordered, categorical data, such as Likert scaled survey responses. For each behavior, we tested the null hypothesis that there was not a significant correlation between attitude, norms, or control and intent. The only assumption of ordinal regression is that data demonstrate proportional odds, meaning the relationship (slope) between each pair of terms is the same. To avoid assumption violations for modeling of the second behavior (PLDs on workers and heavy equipment), we applied scale effects for the control term. Scale effects did not ameliorate violations for the third behavior (PLDs for general situational awareness); consequently, results for this particular model include assumption violations for the control variable.
Measures of outcome likelihood (“very unlikely”, “somewhat unlikely”, “unsure”, “somewhat likely”, and “very likely”) and value (“very bad”, “somewhat bad”, “neutral”, “somewhat good”, and “very good”) were recoded bipolarly as −2, −1, 0, 1, and 2, respectively. This scoring system is recommended by Ajzen [27] and is typical for TPB studies [34]. To express attitude as a single value across multiple possible outcomes, we calculated a total score by multiplying each outcome likelihood with each corresponding value and then summing across all seven outcomes. Scores for a single outcome could range from −4 to 4, and total scores for an individual survey participant could range from −28 to 28. Positive numbers represent situations in which desirable outcomes are likely to result from LS use or undesirable outcomes are avoided. Conversely, negative numbers signify that undesirable outcomes are likely or good outcomes are not. The higher the total score, the stronger the positive attitude toward LS safety behaviors.
Measures of control (“none”, “some”, “a lot”) were designated as 1, 2, and 3, respectively. Norm responses were numbered 1, 2, 3, 4, and 5 for “very unlikely”, “somewhat unlikely”, “unsure”, “somewhat likely”, and “very likely”, respectively. Since the survey measured attitude and control of a single, inclusive behavior (using PLDs on logging operations), all behaviors had one total attitude score and one control score. Each of the three behaviors had a separate norm and intent score.
3. Results
3.1. Completed Sample
We distributed 331 surveys across the three LEAP update meetings (Lewison: 117, St. Maries: 83, Sandpoint: 131), and received 296 completed questionnaires (Lewiston: 96, St. Maries: 80, Sandpoint: 120) for an overall response rate of 89%. Sixteen surveys (Lewiston: 4, St. Maries: 6, Sandpoint: 6) were completed by non-loggers, including foresters and millworkers, as stated by participants in the job title question. We removed these 16 from analysis, so our final sample comprised of 280 surveys (85% of the total distributed). The response rate was high in comparison to similar studies administering surveys at logger workshops (e.g., 31% by Koirala et al. [41] and 78% by Helmkamp et al. [40]) and quite high for survey response generally. According to the Bureau of Labor Statistics’ Quarterly Census of Employment and Wages, Idaho employed an average of 1,290 loggers (North American Industry Classification System code 113310) in 2016 [50], and in June 2018 the number of certified logging professionals in the state was 424 [51]. Thus, our completed sample represented approximately 66% of all Pro-Loggers and about 22% of all Idaho loggers.
3.2. Participant Background Information
Demographic and employment results are summarized in Table 2. Our sample predominately comprised of loggers who were fifty or more years of age (55.4%) with over twenty years of logging experience (74.4%). Specific logger occupations varied, but the majority of respondents selected more than one job, including that of owner (39.4%), followed closely by loggers employed solely as equipment operators (30.3%). Most surveyed loggers worked on ground systems, including mechanized, partially mechanized, or a combination of both (63.1%); whereas only about one-quarter worked on cable systems (26.4%).
In general, participants did not have previous exposure to LS devices on logging operations (Table 3), having the least experience with emergency receivers (e.g., SPOT, Garmin inReach). Seventy-two percent (72.4%) of surveyed loggers owned a smartphone (n = 279), and of those that did, most (96.4%) reported carrying their phone with them while working on logging operations (n = 201), with 52.7% “always” carrying their phone, 30.3% “often” carrying it, and only 13.5% “rarely” with it.
Loggers strongly agreed that finding new ways to improve safety on logging operations is important (67.8% chose “very important” and 19.2% chose “somewhat important”), with only 1.8% of respondents marking it as unimportant (0.7% selected “very unimportant” and 1.1% selected “somewhat unimportant”) (n = 276). Using the Sign and Wilcoxon Sign-Rank tests with an alpha of 0.05, we rejected the null hypothesis that median response scores were less than or equal to 3 (“neutral”), indicating that loggers did perceive a significant importance to finding new safety solutions. p-values were less than 0.001 for both tests, with reported median (Sign) and pseudo-median (Wilcoxon Sign-Rank) values of 5 (“very important”) and 5.0, respectively.
3.3. TPB Assessment
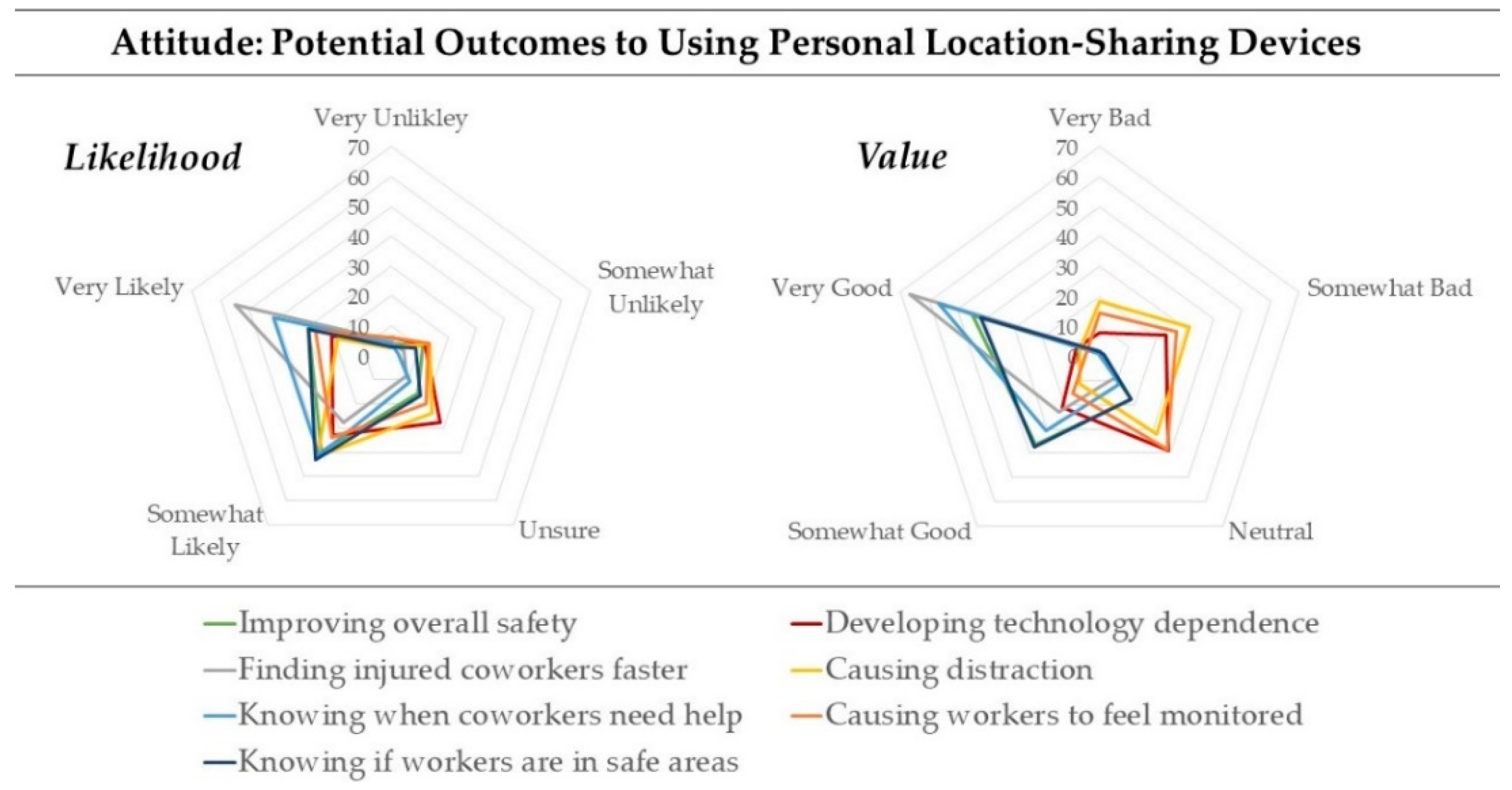
Figure 3 shows survey responses for attitude-based questions, pertaining to the likelihood and value of the seven potential outcomes to using PLDs on logging operations. More than half of participants thought that each of the outcomes was likely (Table 4, Section C). The greatest consensus for any one outcome was for finding injured coworkers faster, which 54.9% of loggers deemed “very likely” to occur and 66.8% valued as “very good” (Table 4, Section D). Other “very good” outcomes included improving overall workplace safety (44.7%), knowing when coworkers might need help (56.6%), and knowing when workers are in safe or unsafe areas (42.0%). Positive outcome responses had high internal consistency, with Cronbach’s alphas of 0.86 (for likelihood) and 0.85 (for value), suggesting that all four items measured the same underlying concept of improved occupational safety. Loggers were mostly “unsure” about the other three outcomes: developing a dependence on the technology (39.1%), causing distraction from other work activities (32.0%), and causing workers to feel like they are being watched or monitored (38.5%) (Table 4, Section D). Although about 20–30% of participants considered these “somewhat bad”, some indicated benefits to technology dependence (21.1% “somewhat good”) and workers feeling monitored (15.2% “somewhat good”). This trend could indicate that loggers do not prioritize concerns uniformly. Whereas some may perceive technological dependence as a drawback, others may consider it an advantage compensating for human error. Valuation of workers feeling monitored may also vary by individual, based on beliefs about expectation of privacy at work. The mean total attitude score, accounting for both likelihood and value of all outcomes, was 6 on a scale of -28 to 28, with a standard deviation of 8 (n = 248). This score represents an overall (weakly) positive attitude toward using PLDs on logging operations.
Surveyed loggers indicated high perceived behavioral control, with 47.6% reporting having “a lot” of influence on whether PLDs are used within the company or organization, and only 17.2% stating no influence (Table 4, Section E). Loggers varied in their estimation of intent among other loggers (a measure of descriptive norms), but generally were either “unsure” about others’ actions or predicted they were “somewhat likely” to adopt each of the safety practices (Table 4, Section B).
Overall, loggers indicated an intent to use LS on their logging operations (Figure 4), and we rejected the null hypothesis that median scores were less than or equal to 3 (“unsure”) with Sign and Wilcoxon Sign-Rank tests (Table 5). Intent was highest for using PLDs with local, automatic location sharing for hand fallers; 55.5% of respondents reported that they were “somewhat likely” or “very likely” to adopt this practice, with nearly one-third selecting “very likely” (Table 4, Section A). Similarly, half of loggers (51.4%) were likely to use PLDs on all ground workers and heavy equipment. Only about one-quarter of participants reported that they were unlikely to adopt the three behaviors. Internal consistency was high among the three safety practices (Cronbach’s alpha of 0.84), suggesting that loggers may not have differentiated between the fine details of each practice.
Based on ordinal regression, we failed to reject the null hypothesis that intent varies by age; however, the results indicated that intent does vary by the frequency with which loggers carry their smartphones during work activities, such that individuals who have their smartphone with them more often on logging operations are more likely to adopt the LS safety practices (Table 6). Age and phone use did not have significant interaction effects.
Results of ordinal regression evaluating the effect of attitude, descriptive norms, and perceived behavioral control on intent to perform safety behaviors show that intent varies significantly by total attitude score and norms for all three behaviors and varies by control for two behaviors (Table 7). Thus, for our survey sample, TPB attributes are correlated with logger likelihood of using PLDs. One model (PLDs for general situational awareness) had assumption violations for the control term, so results of this model should be interpreted with caution.
3.4. Additional LS Adoption Elements
Overall, surveyed loggers believed that all three device types would improve safety on logging operations (Table 8, Section A). Two-way radios with LS had the most support (78.8% indicated “yes”), followed by devices that share locations through smartphones (72.1%). Among specific device features, a help button that could send distress calls to coworkers at the jobsite was considered beneficial by the largest number of participants (83.3%) (Table 8, Section B). More than three-quarters of loggers (79.0%) indicated a benefit of help buttons to contact emergency services, although emergency search and rescue receivers were not as valued as other types of devices (Table 8, Sections A-B). Low internal consistency of questions relating to emergency response (Cronbach’s alpha of 0.37) could imply that loggers value LS devices that offer two-way communication in addition to the ability to contact off-site emergency services. Other features identified by loggers as having the potential to improve workplace safety included alerts when workers enter dangerous areas (76.9%); messaging through text, voice, or video (72.2%); and help buttons to contact supervisors at the office (62.4%) (Table 8, Section B). Loggers supported devices that could share automatic position updates among coworkers (72.7%), but they did not perceive a value in sharing real-time positions with supervisors (only 33.9% of respondents selected “yes”). Although participants were generally unconcerned with the privacy implications of sharing real-time location information with others, loggers were less comfortable sharing this type of data with supervisors (32.6% concerned) than with coworkers at the jobsite (only 18.8% concerned) (Table 8, Section C).
Lastly, when asked to indicate degree of concern related to carrying an extra device, such as a radio or smartphone, while working on logging operations, most respondents felt either “not at all concerned” (56.0%) or only “somewhat concerned” (34.7%), and only 9.4% indicated they were “very concerned” about carrying an extra item (n = 277).
4. Discussion
The hazards of logging are well-documented in the literature; previous research has catalogued logging injuries and fatalities across the United States [10,11,15,16,18] and enumerated the factors that contribute to unsafe work environments [15,16,18,21,26,52]. Despite recognition of the risks, including by loggers themselves [18,26,52], high occupational fatality rates persist in the industry. In our study, loggers strongly agreed on the importance of finding new safety solutions. LS may offer a technologically-based approach to improving logging safety by introducing novel types of safety practices. In previous interviews and focus groups, Idaho loggers acknowledged safety benefits of GPS [18,26] and discussed the role of situational awareness in injury mitigation [18]. However, in the Newman et al. study, loggers also proposed drawbacks, including the possibility of disuse [26]. In light of prior, qualitative research, the current study comprises the next step in understanding the role of LS in logging safety: quantifying logger intent to employ LS. Our key finding was that a sample of Idaho loggers representing approximately half of all certified loggers in the state, indicated that they were overall likely to adopt LS safety practices. They supported use of PLDs for both machines and ground workers but were particularly in favor of using them to receive automatic position updates from hand fallers. Additionally, over three-quarters of participants indicated some degree of control, measured as influence, in whether LS devices are used by their companies or organizations. Meta-analyses of TPB studies have observed that intent, and to a lesser extent perceived behavioral control, are important variables for explaining behavior [31,53]. Our results thus encourage future development of LS applications for logging safety.
Another goal of the study was to explore nuances of prospective LS adoption, such as discerning LS outcomes that loggers considered most valuable and most plausible. Based on attitude measures, most participants believed that logging would benefit from using LS for emergency response applications, such as alerting coworkers of an injury and expediting the search for injured individuals. These results are consistent with previous research highlighting the value of GPS for finding injured loggers [18,26]. Participants considered emergency response applications more desirable and also more likely than preventive uses, such as knowing when workers are in safe or unsafe areas, even though in-the-clear status updates were suggested by loggers in the Newman et al. study [26]. Undesirable outcomes, such as developing a dependence on the technology, producing distraction, or causing workers to feel monitored, were generally deemed less likely than each of the positive outcomes. Loggers may have felt that the safety benefits of LS offset these concerns (e.g., ensuring someone can be found in an emergency may overshadow wariness about being monitored). Potential risks will likely vary by application, however. For instance, in injury prevention functions, such as sending GNSS-based warning alerts to operators when ground crew enter hazardous areas, dependence on LS systems could endanger workers in the event of technological failure or reduced positioning accuracy. Conversely, in emergency response, reduced accuracy would likely have little to no detrimental effect on worker safety. Knowledge of how loggers are most likely to use LS, combined with research on device capabilities and limitations in the woods [23,24,25,54], can inform recommendation of guidelines on safe and appropriate use of the technology for logging safety. Such recommendations are important for reducing the chance of inadvertent misuse or overreliance. For instance, in a survey of Finnish loggers, 45% of participants admitted to altering their behavior after wearing personal protective equipment, becoming more careless, faster, and bolder [55].
Understanding the safety needs and expectations of loggers, including desirable device features, can also help focus future development and marketing of LS specifically for logging. Consistent with themes that arose in outcome assessment, most loggers thought LS with emergency response capabilities would improve safety, particularly help (SOS) buttons to contact coworkers or emergency services. Hazardous area alerts were also a popular feature for improving safety, despite lower ratings in the attitude section of the survey. Participants might have differentiated between “knowing when coworkers are in safe or unsafe areas”, which may imply that operators are required to actively observe worker positions (e.g., on a screen displaying real-time locations), and “alerts when workers enter dangerous areas”, which suggests that operators are automatically warned of potentially hazardous situations. Nearly three-quarters of participants thought that automatic position updates for coworkers would improve safety. Only a minority of loggers expressed privacy concerns about sharing real-time location data with others, even though this concern was raised in the Newman et al. study [26] and echoed by participants in an LS survey by Tsai et al. [56]. Tang et al. observed, however, that individuals are more willing to relinquish some privacy if they perceive benefits to sharing location information [57]. Loggers were less comfortable with sharing real-time data with supervisors, perhaps attributing less value to this function. Lederer et al. noted that desired accuracy for private information, such as location data, varied by the receiver [58], but the particular situation was important when the receiver was an employer. Similarly, loggers in our study did discriminate between the safety benefits of sending supervisors help alerts (e.g., for emergency situations) and regular, positional updates. Based on our results, LS devices for logging safety should include emergency response functions and could also incorporate other features for enhancing team situational awareness, such as dangerous area alerts, automatic position updates, or messaging.
The majority of loggers in this study owned a smartphone and had it with them at logging operations. Phone presence at work predicted intent to adopt LS safety practices, such that individuals who more often carry a smartphone are more likely to use PLDs. Those accustomed to regular smartphone use may be more experienced and comfortable with learning new, digital devices and thus may be more amenable to using LS technology. Due to the prevalence of smartphones in the Idaho logging community, recreational-grade, smartphone-based receivers may offer an affordable and accessible LS solution, addressing previously cited concerns about cost and difficulty learning a new technology [26]. Small and light-weight, these RF receivers could be especially appealing to hand fallers, who already carry saws and other gear throughout the work day.
Many of the perceived LS benefits (e.g., knowing when coworkers might need help and finding injured coworkers faster) are especially valuable for ground workers, particularly those who are visually isolated and may not have regular interaction with crew members. Correspondingly, the LS practice with the highest intent (i.e., most “very likely” responses) was using PLDs with local, automatic LS for hand fallers. These results are consistent with previous studies in which loggers discerned higher injury risks for individuals working outside of machine cabs, particularly tree fallers and hookers, who are more vulnerable to being struck by branches, logs, or equipment [18,19,26,52]. Although ground workers are most likely to benefit from LS devices, our completed sample included few individuals (less than 3%) employed solely as hand fallers, chasers, or hookers. Our sample also had few participants with less than nine years of logging experience, a bracket which includes those workers most likely to be injured on logging operations (i.e., individuals with less than one year of logging experience) [15,17,18]. These two groups may have distinctive LS opinions underrepresented in this study, which is a potential limitation. Meanwhile, about half of the sample encompassed loggers identifying as owners, either solely or in conjunction with other positions. Correlating response by profession was beyond the scope of this study, but future studies may compare safety perceptions by job title. For instance, owners may vary from ground crew in their opinions regarding worker privacy or the day-to-day idiosyncrasies of carrying a PLD. The advantage of surveying a large number of company owners is gaining the perspective of those most likely to purchase devices and introduce LS-based safety practices to logging operations. Accordingly, nearly half of surveyed loggers felt that they have a lot of influence on whether PLDs would be used. The effects of nonresponse error on the results are unknown but likely minimal due to the high response rate.
Considering the pervasive emphasis on ground worker safety established throughout the logging literature and reaffirmed in the current study, future research might also explore how LS perceptions vary by logging system (i.e., mechanized, partially-mechanized, cable). Mechanized systems use machines for all tasks, including tree felling, whereas partially mechanized and cable yarding systems rely on manual tree felling by hand fallers (sawyers). Cable yarding operations frequently employ additional ground workers as well, such as hookers who fasten logs to cables for transport and chasers who detach the logs at the landing. Operation type is determined largely by terrain, and therefore varies by region. For instance, cable systems are more common in the Pacific Northwest of the United States (e.g., Idaho, Washington, and Oregon) than in the South (e.g., Alabama, Mississippi, Louisiana, Arkansas, and Texas) and Southeast (e.g., Virginia, North Carolina, South Carolina, Georgia, and Florida). In focus groups conducted by Conway et al., loggers distinguished between safety issues in the Pacific Northwest and the South, remarking that injury risks were lower in the South due to mechanization [52]. Logger reception of LS could potentially vary geographically, depending on regional perceptions of safety needs related to operations.
Lastly, our study contributes to the body of literature on the TPB, demonstrating that the theory can be used as a lens to understand how loggers make behavioral decisions about workplace safety. Specifically, we showed how attitudes, descriptive norms, and perceived behavioral control correlated with logger intent to adopt safety practices involving an emerging technology: LS. Our results are consistent with other studies using the TPB to explain occupational safety behaviors [36,37,38], as well as technology adoption [59,60,61,62]. The greatest factor in logger intent (i.e., highest Chi-Squared (Χ2) values) was instrumental attitude. This result suggests that perceived safety improvements strongly influence loggers’ decisions about safe logging practices involving LS. A potential limitation to our study was the measurement of descriptive (i.e., what others do) rather than injunctive (i.e., what others think I should do) norms. TPB studies sometimes exclude normative pressure, the weakest indicator of intent [31,53], though Morris and Venkatesh argue that norms are important for understanding technology adoption among older individuals, who may initially feel less confident in their ability to make judgements about technology [63]. Over half of our participants were fifty years or older, but intent did not vary by age in our study, indicating that older loggers are just as likely as younger ones to use LS technology. Another caveat to our results is that perceived behavioral control was measured using only a 3-point scale and accounted for only one aspect of control (i.e., perceived influence), whereas control may also be measured as perceived difficulty, which could be a factor if LS devices are not regarded as affordable or user-friendly. These factors may help explain why control correlated with intent less than the other TPB attributes (i.e., much lower Χ2 values), even though it is a typically strong intent variable [53,59,60].
5. Conclusions
LS technology may increase team situational awareness on logging operations by providing loggers with crucial system information about the positions and status of other crew members. Based on surveys of Idaho loggers at three training programs, we recommend further development of LS for logging safety applications. Devices, such as two-way radios with LS capabilities or smartphone-based receivers, would ideally possess multiple functions. For instance, they should be able to indicate when isolated workers, like hand fallers, need help and may be incapacitated (e.g., automatic position updates) and expedite search and rescue efforts with shared GPS coordinates of injured workers. They could also alert loggers, specifically machine operators, of potential hazards for ground workers in low visibility conditions. These applications may be most relevant to cable yarding or partially-mechanized systems, so further research is necessary to evaluate the perceived need for LS on fully mechanized operations. Research on use of LS for logging safety could also benefit from additional sampling efforts and analysis to characterize hand fallers’ perspectives, as they were underrepresented in this study but would be highly impacted by LS practices. Furthermore, although LS has potentially life-saving implications for loggers, the technology has limitations, such as positioning and signal transmission errors associated with GNSS-RF devices in certain environments. Therefore, before LS is widely implemented, we recommend development of safety guidelines outlining appropriate and inappropriate operation of LS, accounting for device capabilities and preferred uses of the technology. Lastly, the TPB has been employed to understand adoption of technology and occupational safety behaviors separately; our study supports applying the TPB to a novel combination of these two themes (i.e., technologically-based occupational safety), demonstrating that instrumental attitude, descriptive norms, and perceived behavioral control correlate with intent to adopt LS safety practices.
Author Contributions
Conceptualization, A.M.W. and R.F.K.; Methodology, A.M.W., R.F.K., S.M.N. and T.B.P.; Formal Analysis, A.M.W. and R.F.K.; Investigation, A.M.W. and R.F.K.; Writing-Original Draft Preparation, A.M.W.; Writing-Review and Editing, A.M.W., R.F.K., S.M.N. and T.B.P.; Visualization, A.M.W.; Funding Acquisition, R.F.K. and S.M.N.
Funding
This research was funded by the U.S. Centers for Disease Control and Prevention (CDC) National Institute for Occupational Safety and Health (NIOSH) grant number 5 U01 OH010841.
Acknowledgments
The authors would like to thank the loggers who participated in this study, as well as the University of Idaho Extension Office’s Logger Education to Advance Professionalism (LEAP) program for permitting to us to present and administer the survey at 2018 LEAP update meetings. The authors would also like to thank Ryer Becker, Dylan Hodgson, and Colton Smith for pre-testing survey questions.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Table A1 lists survey questions as they appeared for participants at the logger workshops. Also shown are associated themes related to the study objectives: background information (i.e., “Background”), Theory of Planned Behavior assessment (i.e., “TPB”), and other adoption elements (i.e., “Adoption”).

Table A1.
Survey instrument.
| Theme | Survey Question |
|---|---|
| Background | 1. Have you ever used the following location-sharing devices during logging operations? |
| ▪ Emergency search and rescue receivers (e.g., SPOT, inReach) | |
| ▪ 2-way radios with location-sharing (e.g., Garmin Rino) | |
| ▪ Devices that use smartphones to share locations (e.g., goTenna) | |
| Adoption | 2. In your opinion, would the following types of location-sharing devices improve safety on active logging operations? |
| ▪ Emergency search and rescue receivers (e.g., SPOT, inReach) | |
| ▪ 2-way radios with location-sharing (e.g., Garmin Rino) | |
| ▪ Devices that use smartphones to share locations (e.g., goTenna) | |
| Adoption | 3. In your opinion, would the following features of location-sharing devices help improve workplace safety? |
| ▪ Alerts when workers enter dangerous areas | |
| ▪ Automatic updates of user positions to coworkers at the jobsite | |
| ▪ Automatic updates of user positions to supervisors at the office | |
| ▪ SOS or Help button to contact coworkers at the jobsite | |
| ▪ SOS or Help button to contact supervisors at the office | |
| ▪ SOS or Help button to contact emergency services | |
| ▪ Messaging through text, voice, or video | |
| Adoption | 4. Would you be concerned about worker privacy if workers’ real-time locations were seen by the following people? |
| ▪ Coworkers at the jobsite | |
| ▪ Supervisors or others at a remote office or shop | |
| Background | 5. (a) Do you own a smartphone? |
| (b) How often do you carry your smartphone with you while working on logging operations (either turned on or off)? | |
| Adoption | 6. How concerned would you be about having to carry an extra device (such as on the belt or in a pocket) while working on logging operations? |
| Adoption | 7. How can location-sharing devices best be used to improve safety on logging operations? Please rank the following in order of importance (1,2,3,4), where 1 = the most important safety application, and 4 = the least important safety application. |
| ▪ Contacting off-site emergency response | |
| ▪ Finding injured workers quickly | |
| ▪ Alerting coworkers when someone needs help | |
| ▪ Preventing accidents on the jobsite | |
| Background | 8. How important or unimportant is it to find new ways of improving safety on logging operations? |
| TPB | 9. How likely or unlikely are the following results if personal location-sharing devices are used on logging operations? |
| ▪ Improving overall workplace safety | |
| ▪ Developing a dependence on the technology | |
| ▪ Finding injured coworkers faster | |
| ▪ Causing distraction from other work activities | |
| ▪ Knowing when coworkers might need help | |
| ▪ Causing workers to feel like they are being watched or monitored | |
| ▪ Knowing when coworkers are in safe or unsafe areas | |
| TPB | 10. How good or bad are the following results of using personal location-sharing devices on logging operations? |
| ▪ Improving overall workplace safety | |
| ▪ Developing a dependence on the technology | |
| ▪ Finding injured coworkers faster | |
| ▪ Causing distraction from other work activities | |
| ▪ Knowing when coworkers might need help | |
| ▪ Causing workers to feel like they are being watched or monitored | |
| ▪ Knowing when coworkers are in safe or unsafe areas | |
| TPB | 11. How likely or unlikely are you to use personal location-sharing devices (PLDs) in the following ways on active logging operations? |
| ▪ Using PLDs with local, automatic location sharing for hand fallers | |
| ▪ Using PLDS on all ground workers and heavy equipment | |
| ▪ Using GPS-based PLDs and geofences for general situational awareness | |
| TPB | 12. Within your company or organization, how much influence do you have in whether personal location-sharing devices get used? |
| TPB | 13. How likely or unlikely do you think other loggers are to use personal location-sharing devices (PLDs) in the following ways? |
| ▪ Using PLDs with local, automatic location sharing for hand fallers | |
| ▪ Using PLDS on all ground workers and heavy equipment | |
| ▪ Using GPS-based PLDs and geofences for general situational awareness | |
| Background | 14. What is your age? |
| Background | 15. How many years have you worked in the logging industry? |
| Background | 16. What is your current job? Please select all that apply. |
| ▪ Hand Faller | |
| ▪ Chaser/Hooker | |
| ▪ Equipment Operator | |
| ▪ Truck Driver | |
| ▪ Owner | |
| ▪ Other—please specify | |
| Background | 17. On which of the following types of operations do you usually work? Please select all that apply. |
| ▪ Mechanized ground-based logging (feller-buncher and skidder or shovel) | |
| ▪ Partially mechanized ground-based logging (hand faller and skidder or shovel) | |
| ▪ Cable logging | |
| ▪ Other—please specify |
References
- SPOT Gen3. Available online: https://www.findmespot.com/en/index.php?cid=100 (accessed on 8 December 2018).
- inReach Global Satellite Technology. Available online: https://explore.garmin.com/en-US/inreach (accessed on 8 December 2018).
- Introducing the Rino® 750 and 755t rugged GPS Navigator with Two-Way Radio and Connected Features. Available online: https://garmin.com/en-US/blog/fishandhunt/introducing-rino-750-755t-rugged-GPS-navigator-two-way-radio/ (accessed on 8 December 2018).
- Firefighter GPS Devices. Available online: https://www.raveon.com/firefighter-gps-devices/ (accessed on 8 December 2018).
- TW-850-01 TSM Ghost™. Available online: https://www.trellisware.com/wp-content/uploads/2017/02/TW-850-01-TSM-Ghost-Datasheet.pdf (accessed on 8 December 2018).
- Beartooth. Available online: https://www.beartooth.com (accessed on 8 December 2018).
- goTenna. Available online: https://www.gotenna.com/pages/mesh (accessed on 8 December 2018).
- Beartooth Technical Specs. Available online: https://beartooth.com/pages/beartooth-tech-specs (accessed on 8 December 2018).
- Keefe, R.F.; Eitel, J.U.H.; Smith, A.M.S.; Tinkham, W.T. Applications of multi-transmitter GPS-VhF in forest operations. In Proceedings of the 47th International Symposium on Forestry Mechanization and 5th International Forest Engineering Conference, Gerardmer, France, 23–26 September 2014. [Google Scholar]
- Fosbroke, D.E.; Kisner, S.M.; Myers, J.R. Working lifetime risk of occupational fatal injury. Am. J. Ind. Med. 1997, 31, 459–467. [Google Scholar] [CrossRef]
- Sygnatur, E.F. Logging is Perilous Work. Compens. Work. Cond. 1998, 3, 1–9. [Google Scholar]
- Bureau of Labor Statistics 2015 Census of Fatal Occupational Injuries. Available online: www.bls.gov/iif/oshwc/cfoi/cfch0014.pdf (accessed on 25 April 2017).
- Bureau of Labor Statistics 2014 Census of Fatal Occupational Injuries. Available online: www.bls.gov/iif/oshwc/cfoi/cfch0013.pdf (accessed on 17 October 2017).
- Bureau of Labor Statistics Occupational Injuries/Illnesses and Fatal Injuries Profiles. Available online: https://data.bls.gov/gqt/InitialPage (accessed on 24 April 2017).
- Shaffer, R.M.; Milburn, J.S. Injuries on feller-buncher/grapple skidder logging operations in the Southeastern United States. For. Prod. J. 1999, 49, 24–26. [Google Scholar]
- Bell, J.L.; Helmkamp, J.C. Non-fatal injuries in the West Virginia logging industry: Using workers’ compensation claims to assess risk from 1995 through 2001. Am. J. Ind. Med. 2003, 44, 502–509. [Google Scholar] [CrossRef]
- Roberts, T.; Shaffer, R.M.; Bush, R.J. Injuries on mechanized logging operations in the southeastern United States in 2001. Forest Prod. J. 2005, 55, 86–89. [Google Scholar]
- Lagerstrom, E.; Magzamen, S.; Rosecrance, J. A mixed-methods analysis of logging injuries in Montana and Idaho. Am. J. Ind. Med. 2017, 60, 1077–1087. [Google Scholar] [CrossRef]
- Bordas, R.M.; Davis, G.A.; Hopkins, B.L.; Thomas, R.E.; Rummer, R.B. Documentation of hazards and safety perceptions for mechanized logging operations in East Central Alabama. J. Agric. Saf. Health 2001, 7, 113–123. [Google Scholar] [CrossRef]
- Lefort, A.J.; Pine, J.C.; Marx, B.D. Characteristics of injuries in the logging industry of Louisiana, USA: 1986–1998. Int. J. For. Eng. 2003, 14, 75–89. [Google Scholar] [CrossRef]
- Scott, D.F. A study of logger fatalities from 1992-2000. Inj. Prev. 2004, 10, 239–243. [Google Scholar] [CrossRef] [Green Version]
- Logsafe GPS Monitoring. Available online: http://logsafe.co.nz/ (accessed on 8 December 2018).
- Zimbelman, E.G.; Keefe, R.F.; Strand, E.K.; Kolden, C.A.; Wempe, A.M. Hazards in motion: Development of mobile geofences for use in logging safety. Sensors 2017, 17, 822. [Google Scholar] [CrossRef]
- Wempe, A.M.; Keefe, R.K. Characterizing rigging crew proximity to hazards on cable logging operations using GNSS-RF: Effect of GNSS positioning error on worker safety status. Forests 2017, 8, 357. [Google Scholar] [CrossRef]
- Zimbelman, E.G.; Keefe, R.K. Real-time positioning in logging: Effects of forest stand characteristics, topography, and line-of-sight obstructions on GNSS-RF transponder accuracy and radio signal propagation. PLoS ONE 2018, 13. [Google Scholar] [CrossRef] [PubMed]
- Newman, S.M.; Keefe, R.F.; Brooks, R.H.; Ahonen, E.Q.; Wempe, A.M. Human factors affecting logging injury incidents in Idaho and the potential for real-time location-sharing technology to improve safety. Safety 2018, 4, 43. [Google Scholar] [CrossRef] [PubMed]
- Ajzen, I. The Theory of Planned Behavior. Organ. Behav. Hum. Decis. Process. 1991, 50, 179–211. [Google Scholar] [CrossRef]
- Francis, J.; Eccles, M.P.; Johnston, M.; Walker, A.E.; Grimshaw, J.M.; Foy, R.; Kaner, E.F.S.; Smith, L.; Bonetti, D. Constructing Questionnaires Based on the Theory of Planned Behaviour: A Manual for Health Services Researchers; Centre for Health Services Research, University of Newcastle upon Tyne: Newcastle upon Tyne, UK, 2004; ISBN 0-9540161-5-7. [Google Scholar]
- Yzer, M. Reasoned Action Theory: Persuasion as Belief-Based Behavior Change. In The SAGE Handbook of Persuasion: Developments in Theory and Practice; Dillard, J.P., Shen, L., Eds.; SAGE Publications, Inc.: Thousand Oaks, CA, USA, 2012; ISBN 978145221840. [Google Scholar]
- Perloff, R.M. The Dynamics of Persuasion: Communication and Attitudes in the Twenty-First Century, 4th ed.; Taylor and Francis: New York, NY, USA, 2010; ISBN 9780203870327. [Google Scholar]
- Armitage, C.J.; Conner, M. Efficacy of the Theory of Planned Behavior: A meta-analytic review. Br. J. Soc. Psychol. 2001, 40, 471–499. [Google Scholar] [CrossRef] [PubMed]
- Blue, C.L.; Wilbur, J.; Marston-Scott, M.V. Exercise among blue-collar workers: Application of the Theory of Planned Behavior. Res. Nurs. Health 2001, 24, 481–493. [Google Scholar] [CrossRef] [PubMed]
- Welbourne, J.; Booth-Butterfield, S. Using the Theory of Planned Behavior and a Stage Model of Persuasion to Evaluate a Safety Message for Firefighters. Health Commun. 2005, 18, 141–154. [Google Scholar] [CrossRef] [PubMed]
- Montaño, D.E.; Kasprzyk, D. Theory of Reasoned Action, Theory of Planned Behavior, and the Integrated Behavioral Model. In Health Behavior: Theory, Research, and Practice Fifth Edition; Glanz, K., Rimer, B.K., Viswanath, K., Eds.; Jossey-Bass: San Francisco, CA, USA, 2015; pp. 95–103. ISBN 1118629051. [Google Scholar]
- Adamos, G.; Nathanail, E. Predicting the effectiveness of road safety campaigns through alternative research designs. J. Saf. Res. 2016, 59, 83–95. [Google Scholar] [CrossRef]
- Johnson, S.E.; Hall, A. The prediction of safe lifting behavior: An application of the theory of planned behavior. J. Saf. Res. 2005, 36, 63–73. [Google Scholar] [CrossRef]
- Colémont, A.; Van den Broucke, S. Measuring determinants of occupational health related behavior in flemish farmers: An application of the Theory of Planned Behavior. J. Saf. Res. 2008, 39, 55–64. [Google Scholar] [CrossRef]
- Quick, B.L.; Stephenson, M.T.; Witte, K.; Vaught, C.; Booth-Butterfield, S.; Patel, D. An examination of antecedents to coal miners’ hearing protection behaviors: A test of the theory of planned behavior. J. Saf. Res. 2008, 39, 329–338. [Google Scholar] [CrossRef] [PubMed]
- Fogarty, G.J.; Shaw, A. Safety climate and the Theory of Planned Behavior: Towards the prediction of unsafe behavior. Accid. Anal. Prev. 2010, 42, 1455–1459. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Helmkamp, J.C.; Bell, J.L.; Lundstrom, W.J.; Ramprasad, J.; Haque, A. Assessing safety awareness and knowledge and behavioral change among West Virginia loggers. Inj. Prev. 2004, 10, 233–238. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Koirala, A.; Kizha, A.R.; Roth, B.E. Perceiving major problems in forest products transportation by trucks and trailers: A cross-sectional survey. Eur. J. For. Eng. 2017, 3, 23–34. [Google Scholar]
- University of Idaho Extension LEAP Update 2018. Available online: https://www.uidaho.edu/-/media/UIdaho-Responsive/Files/Extension/forestry/events/leap-update-2018.ashx?la=en&hash=05A45BAC4429A9F97C91E546F0C47CB326CDAD61 (accessed on 6 March 2018).
- Associated Logging Contractors, Pro-Logger Program. Available online: http://www.idahologgers.com/pro-logger.html (accessed on 6 March 2018).
- Egan, A.F.; Hassler, C.C.; Grushecky, S.T. Logger certification and training: A view from West Virginia’s logging community. For. Prod. J. 1997, 47, 46–50. [Google Scholar]
- Egan, A.F. The introduction of a comprehensive logging safety standard in the USA—The first eighteen months. J. For. Eng. 1998, 9, 17–23. [Google Scholar] [CrossRef]
- Dillman, D.A.; Smyth, J.D.; Christian, L.M. Internet, Mail, and Mixed-mode Surveys the Tailored Design Method Third Edition; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2009; ISBN 1118456149. [Google Scholar]
- Endsley, M.R. Toward a theory of situational awareness in dynamic systems. Hum. Factors 1995, 37, 32–64. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2016; Available online: https://www.R-project.org/ (accessed on 30 December 2016).
- Hankins, M.; French, D.; Horne, R. Statistical guidelines for studies of the Theory of Reasoned Action and the Theory of Planned Behavior. Psychol. Health 2000, 15, 151–161. [Google Scholar] [CrossRef]
- Bureau of Labor Statistics Quarterly Census of Employment and Wages, 2016 Annual Averages. Available online: https://data.bls.gov/cew/apps/data_views/data_views.htm#tab=Tables (accessed on 23 October 2017).
- Associated Logging Contractors, Inc. Personal Communication. 11 June 2018. [Google Scholar]
- Conway, S.H.; Pompeii, L.A.; Casanova, V.; Douphrate, D.I. A qualitative assessment of safe work practices in logging in the Southern United States. Am. J. Ind. Med. 2017, 60, 58–68. [Google Scholar] [CrossRef]
- Godin, G.; Kok, G. The Theory of Planned Behavior: A review of its applications to health-related behaviors. Am. J. Health Promot. 1996, 11. [Google Scholar] [CrossRef]
- Becker, R.M.; Keefe, R.F.; Anderson, N.M. Use of real-time GNSS-RF data to characterize the swing movements of forestry equipment. Forests 2017, 8, 44. [Google Scholar] [CrossRef]
- Klen, T. Personal protectors and working behavior of loggers. Saf. Sci. 1997, 25, 89–103. [Google Scholar] [CrossRef]
- Tsai, J.Y.; Kelley, P.G.; Cranor, L.F.; Sadeh, N. Location-sharing technologies: Privacy risks and controls. J. Law Policy Inf. Soc. 2010, 6, 119–151. [Google Scholar]
- Tang, K.P.; Lin, J.; Hong, J.I.; Siewiorek, D.P.; Sadeh, N. Rethinking location sharing: Exploring the implications of social-driven vs. purpose-driven location sharing. In Proceedings of the 12th ACM International Conference on Ubiquitous Computing, Copenhagen, Denmark, 26–29 September 2010; pp. 85–94. [Google Scholar] [CrossRef]
- Lederer, S.; Mankoff, J.; Dey, A.K. Who Wants to Know What When? Privacy Preference Determinants in Ubiquitous Computing. In Proceedings of the CHI 2003 Extended Abstracts on Human Factors in Computing Systems, Ft. Lauderdale, FL, USA, 5–10 April 2003; pp. 724–725. [Google Scholar] [CrossRef]
- Lynne, G.D.; Casey, C.F.; Hodges, A.; Rahmani, M. Conservation technology adoption decisions and the Theory of Planned Behavior. J. Econ. Psychol. 1995, 16, 581–598. [Google Scholar] [CrossRef]
- Pavlou, P.A.; Fygenson, M. Understanding and predicting electronic commerce adoption: An extension of the Theory of Planned Behavior. Manag. Inf. Syst. Q. 2006, 30, 115–143. [Google Scholar] [CrossRef]
- Lu, Y.; Zhou, T.; Wang, B. Exploring Chinese users’ acceptance of instant messaging using the Theory of Planned Behavior, the Technology Acceptance Model, and the Flow Theory. Comput. Hum. Behav. 2009, 25, 29–39. [Google Scholar] [CrossRef]
- Wang, S.; Fan, J.; Zhao, D.; Yang, S.; Fu, Y. Predicting consumers’ intention to adopt hybrid electric vehicles: Using an extended version of the Theory of Planned Behavior. Transportation 2016, 43, 123–143. [Google Scholar] [CrossRef]
- Morris, M.G.; Venkatesh, V. Age differences in technology adoption decisions: Implications for a changing work force. Pers. Psychol. 2000, 53, 375–403. [Google Scholar] [CrossRef]
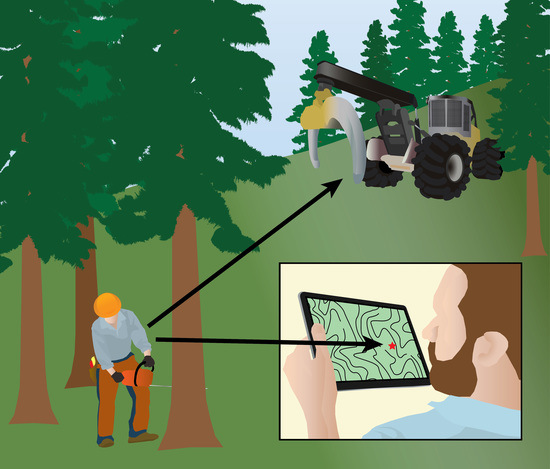
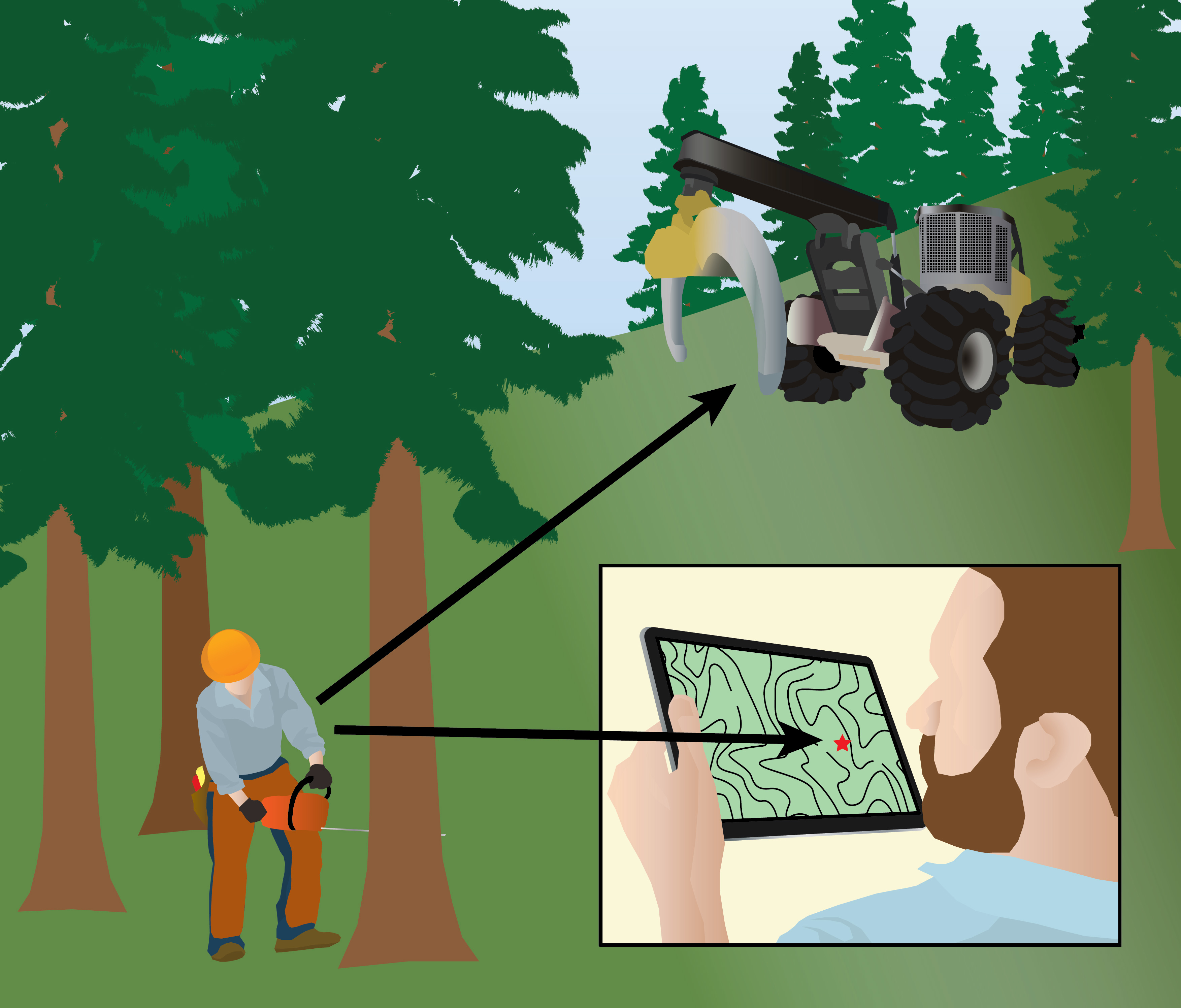
Figure 1.
Illustration of reach: a location-sharing device carried by the hand faller could transmit locations to other coworkers at the jobsite, such as the skidder operator in the top right corner, or to off-site employees, such as the supervisor shown in the bottom right corner.
Figure 1.
Illustration of reach: a location-sharing device carried by the hand faller could transmit locations to other coworkers at the jobsite, such as the skidder operator in the top right corner, or to off-site employees, such as the supervisor shown in the bottom right corner.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 3.
Logger attitudes on outcomes associated with personal location-sharing device use: number of survey responses for different levels of likelihood (left) and value (right).
Figure 3.
Logger attitudes on outcomes associated with personal location-sharing device use: number of survey responses for different levels of likelihood (left) and value (right).

Figure 4.
Logger intent to adopt location sharing (LS) safety practices involving personal location-sharing devices (PLDs): number of survey responses for different levels of likelihood.
Figure 4.
Logger intent to adopt location sharing (LS) safety practices involving personal location-sharing devices (PLDs): number of survey responses for different levels of likelihood.

Table 1.
Summary of measurements and scales for Theory of Planned Behavior attributes.
| Attribute | Measure | Scale |
|---|---|---|
| Intent | Direct | 5-point, bipolar: unlikely–likely |
| Attitude (Instrumental) | Indirect | |
| Potential Outcome | 5-point, bipolar: unlikely–likely | |
| Value of Outcome | 5-point, bipolar: bad–good | |
| Perceived Norms (Descriptive) | Direct | 5-point, bipolar: unlikely–likely |
| Perceived Behavioral Control | Direct | 3-point, unipolar: none–a lot |
Table 2.
Survey responses for demographic and employment characteristics, with sample size (n) indicated in parentheses.
Table 2.
Survey responses for demographic and employment characteristics, with sample size (n) indicated in parentheses.
| Survey Question | Response Percentage (%) |
|---|---|
| Job Title (n = 277) | |
| Hand faller only | 1.8 |
| Chaser/hooker 1 only | 0.4 |
| Equipment operator only | 30.3 |
| Truck driver only | 1.1 |
| Owner only | 13.0 |
| Multiple jobs, including owner | 39.4 |
| Multiple jobs, not including owner | 10.5 |
| Other | 3.6 |
| Operation Type (n = 276) | |
| Mechanized ground 2 only | 33.0 |
| Partially mechanized ground 3 only | 16.3 |
| Cable yarding 4 only | 7.2 |
| Fully and partially mechanized | 13.8 |
| Ground and cable yarding | 19.2 |
| Other | 10.5 |
| Age (n = 278) | |
| 20–29 years | 7.9 |
| 30–39 years | 20.5 |
| 40–49 years | 16.2 |
| 50 or more years | 55.4 |
| Logging Experience (n = 278) | |
| 9 or less years | 7.9 |
| 10–19 years | 17.6 |
| 20–29 years | 21.9 |
| 30–39 years | 25.9 |
| 40 or more years | 26.6 |
1 Hookers are also known as choker (choke) setters. 2 Mechanized ground-based operations typically include a feller-buncher and grapple skidder or a cut-to-length harvester and forwarder. All workers are enclosed in cabs while operating these machines and other machines (e.g., loaders and processors). 3 Partially mechanized ground-based operations include a faller cutting and bucking trees manually paired with a log skidder. 4 Traditional cable yarding operations have hand fallers cutting trees and two or more individuals hooking and unhooking log chokers. Chokers are wire rope segments attached to logs as they are yarded.
Table 3.
Survey responses for previous location sharing (LS) use, with sample size (n) indicated in parentheses. Answer categories chosen by 50% or more of participants are highlighted in grey.
Table 3.
Survey responses for previous location sharing (LS) use, with sample size (n) indicated in parentheses. Answer categories chosen by 50% or more of participants are highlighted in grey.
| Survey Question | Response Percentage (%) | ||
|---|---|---|---|
| No | Unsure | Yes | |
| Emergency receivers (n = 271) | 91.5 | 1.8 | 6.6 |
| Two-way radios with LS (n = 270) | 79.3 | 1.1 | 19.6 |
| Smartphone receivers (n = 271) | 87.8 | 1.1 | 11.1 |
Table 4.
Survey responses about location sharing (LS) and personal location-sharing devices (PLDs) for questions based on the Theory of Planned Behavior, with sample size (n) indicated in parentheses. Answer categories chosen by 50% or more of participants are highlighted in grey.
Table 4.
Survey responses about location sharing (LS) and personal location-sharing devices (PLDs) for questions based on the Theory of Planned Behavior, with sample size (n) indicated in parentheses. Answer categories chosen by 50% or more of participants are highlighted in grey.
| Survey Question | Response Percentage (%) | |||||
|---|---|---|---|---|---|---|
| Very Unlikely | Somewhat Unlikely | Unsure | Somewhat Likely | Very Likely | ||
| A. Intent—Likelihood of adopting LS (self) | ||||||
| Automatic LS of hand fallers (n = 270) | 10.7 | 14.8 | 18.9 | 27.0 | 28.5 | |
| PLDS on workers and equipment (n = 274) | 10.2 | 14.6 | 23.7 | 32.1 | 19.3 | |
| PLDS for situational awareness (n = 273) | 10.3 | 13.9 | 28.9 | 29.7 | 17.2 | |
| B. Norms—Likelihood of others adopting LS | ||||||
| Automatic LS of hand fallers (n = 273) | 4.0 | 10.3 | 28.9 | 38.8 | 17.9 | |
| PLDS on workers and equipment (n = 273) | 2.6 | 15.4 | 38.1 | 34.8 | 9.2 | |
| PLDS for situational awareness (n = 272) | 4.4 | 14.0 | 40.1 | 34.2 | 7.4 | |
| C. Attitude—Likelihood of PLD use outcomes | ||||||
| Improving overall safety (n = 276) | 4.0 | 11.2 | 15.6 | 39.9 | 29.3 | |
| Developing technology dependence (n = 273) | 6.2 | 12.1 | 27.8 | 33.0 | 20.9 | |
| Finding injured coworkers faster (n=273) | 4.8 | 4.4 | 8.4 | 27.5 | 54.9 | |
| Causing distraction (n = 275) | 2.5 | 13.5 | 23.6 | 41.5 | 18.9 | |
| Knowing when coworkers need help (n = 272) | 4.0 | 2.6 | 10.7 | 41.2 | 41.5 | |
| Causing workers to feel monitored (n = 276) | 6.2 | 13.0 | 19.9 | 34.1 | 26.8 | |
| Knowing if workers are in safe areas (n = 277) | 2.9 | 8.7 | 16.6 | 43.0 | 28.9 | |
| Very Bad | Somewhat Bad | Neutral | Somewhat Good | Very Good | ||
| D. Attitude—Value of PLD use outcomes | ||||||
| Improving overall safety (n = 273) | 0.7 | 0.4 | 17.9 | 36.3 | 44.7 | |
| Developing technology dependence (n = 274) | 8.0 | 23.4 | 39.1 | 21.2 | 8.4 | |
| Finding injured coworkers faster (n = 274) | 1.5 | 0.0 | 8.8 | 23.0 | 66.8 | |
| Causing distraction (n = 275) | 18.2 | 31.3 | 32.0 | 11.6 | 6.9 | |
| Knowing when coworkers need help (n = 272) | 0.7 | 0.4 | 11.4 | 30.9 | 56.6 | |
| Causing workers to feel monitored (n = 270) | 14.4 | 27.0 | 38.5 | 15.2 | 4.8 | |
| Knowing if workers are in safe areas (n = 269) | 1.5 | 1.5 | 17.5 | 37.5 | 42.0 | |
| None | Some | A Lot | ||||
| E. Control—Influence in PLD use (n = 273) | 17.2 | 35.2 | 47.6 | |||
Table 5.
Results of Sign Tests and Wilcoxon Sign-Rank Tests, with the latter in parentheses (alpha = 0.05). “LS” stands for location sharing, and “PLD” stands for personal location-sharing device.
Table 5.
Results of Sign Tests and Wilcoxon Sign-Rank Tests, with the latter in parentheses (alpha = 0.05). “LS” stands for location sharing, and “PLD” stands for personal location-sharing device.
| Survey Question | Median | p-Value |
|---|---|---|
| Likelihood of using automatic LS for hand fallers | 4 | <0.001 |
| (3.5) | (<0.001) | |
| Likelihood of using PLDs on workers/equipment | 4 | <0.001 |
| (3.5) | (<0.001) | |
| Likelihood of using PLDs for situational awareness | 3 | <0.001 |
| (3.5) | (0.0001) |
Table 6.
Results of ordinal regression (alpha = 0.05) for intent versus age and smartphone frequency with interactions effects (Age:Phone). “LS” stands for location sharing, and “PLD” stands for personal location-sharing device.
Table 6.
Results of ordinal regression (alpha = 0.05) for intent versus age and smartphone frequency with interactions effects (Age:Phone). “LS” stands for location sharing, and “PLD” stands for personal location-sharing device.
| Behavior | P-Value (Chi-Squared Test Statistic) | ||
|---|---|---|---|
| Age | Phone | Age:Phone | |
| Automatic LS for hand fallers | 0.2077 | <0.001 | 0.7915 |
| (4.552) | (250.204) | (5.470) | |
| PLDs on workers and heavy equipment | 0.6271 | <0.001 | 0.7389 |
| (1.744) | (261.657) | (6.010) | |
| PLDs for general situational awareness | 0.6578 | <0.001 | 0.9674 |
| (1.607) | (254.152) | (2.919) | |
Table 7.
Results of ordinal regression (alpha = 0.05) for intent versus attitude, norms, and control of location sharing (LS) behaviors. PLD stands for personal location-sharing device.
Table 7.
Results of ordinal regression (alpha = 0.05) for intent versus attitude, norms, and control of location sharing (LS) behaviors. PLD stands for personal location-sharing device.
| Behavior | P-Value (Chi-Squared Test Statistic) | ||
|---|---|---|---|
| Attitude | Norms | Control | |
| Automatic LS for hand fallers | <0.001 (75.253) | <0.001 (55.839) | 0.0358 (6.657) |
| PLDs on workers and heavy equipment | <0.001 (75.143) | <0.001 (53.225) | 0.9851 (0.030) |
| PLDs for general situational awareness | <0.001 (76.003) | <0.001 (74.293) | 0.0453 (6.187) |
Table 8.
Survey response percentages for no/unsure/yes questions about location sharing (LS), with sample size (n) indicated in parentheses. Answer categories chosen by 50% or more of participants are highlighted in grey.
Table 8.
Survey response percentages for no/unsure/yes questions about location sharing (LS), with sample size (n) indicated in parentheses. Answer categories chosen by 50% or more of participants are highlighted in grey.
| Survey Question | Response Percentage (%) | |||
|---|---|---|---|---|
| No | Unsure | Yes | ||
| A. Improvement to safety by device | ||||
| Emergency receivers (n = 263) | 16.0 | 20.5 | 63.5 | |
| Two-way radios with LS (n = 269) | 8.6 | 12.6 | 78.8 | |
| Smartphone receivers (n = 272) | 14.0 | 14.0 | 72.1 | |
| B. Improvement to safety by feature | ||||
| Dangerous area alerts (n = 277) | 11.9 | 11.2 | 76.9 | |
| Automatic updates to coworkers (n = 275) | 13.1 | 14.2 | 72.7 | |
| Automatic updates to supervisors (n = 271) | 47.2 | 18.8 | 33.9 | |
| Help button to coworkers (n = 275) | 7.3 | 9.5 | 83.3 | |
| Help button to supervisors (n = 274) | 24.1 | 13.5 | 62.4 | |
| Help button to emergency services (n = 276) | 8.3 | 12.7 | 79.0 | |
| Messaging (n = 273) | 12.8 | 15.0 | 72.2 | |
| C. Privacy concerns associated with real-time LS | ||||
| Coworkers (n = 276) | 72.5 | 8.7 | 18.8 | |
| Supervisors (n = 273) | 56.0 | 11.4 | 32.6 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Wempe, A.M.; Keefe, R.F.; Newman, S.M.; Paveglio, T.B. Intent to Adopt Location Sharing for Logging Safety Applications. Safety 2019, 5, 7. https://0-doi-org.brum.beds.ac.uk/10.3390/safety5010007
AMA Style
Wempe AM, Keefe RF, Newman SM, Paveglio TB. Intent to Adopt Location Sharing for Logging Safety Applications. Safety. 2019; 5(1):7. https://0-doi-org.brum.beds.ac.uk/10.3390/safety5010007
Chicago/Turabian StyleWempe, Ann M., Robert F. Keefe, Soren M. Newman, and Travis B. Paveglio. 2019. "Intent to Adopt Location Sharing for Logging Safety Applications" Safety 5, no. 1: 7. https://0-doi-org.brum.beds.ac.uk/10.3390/safety5010007
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.