
A Novel Nonsingular Terminal Sliding Mode Control-Based Double Interval Type-2 Fuzzy Systems: Real-Time Implementation

Abstract
:1. Introduction
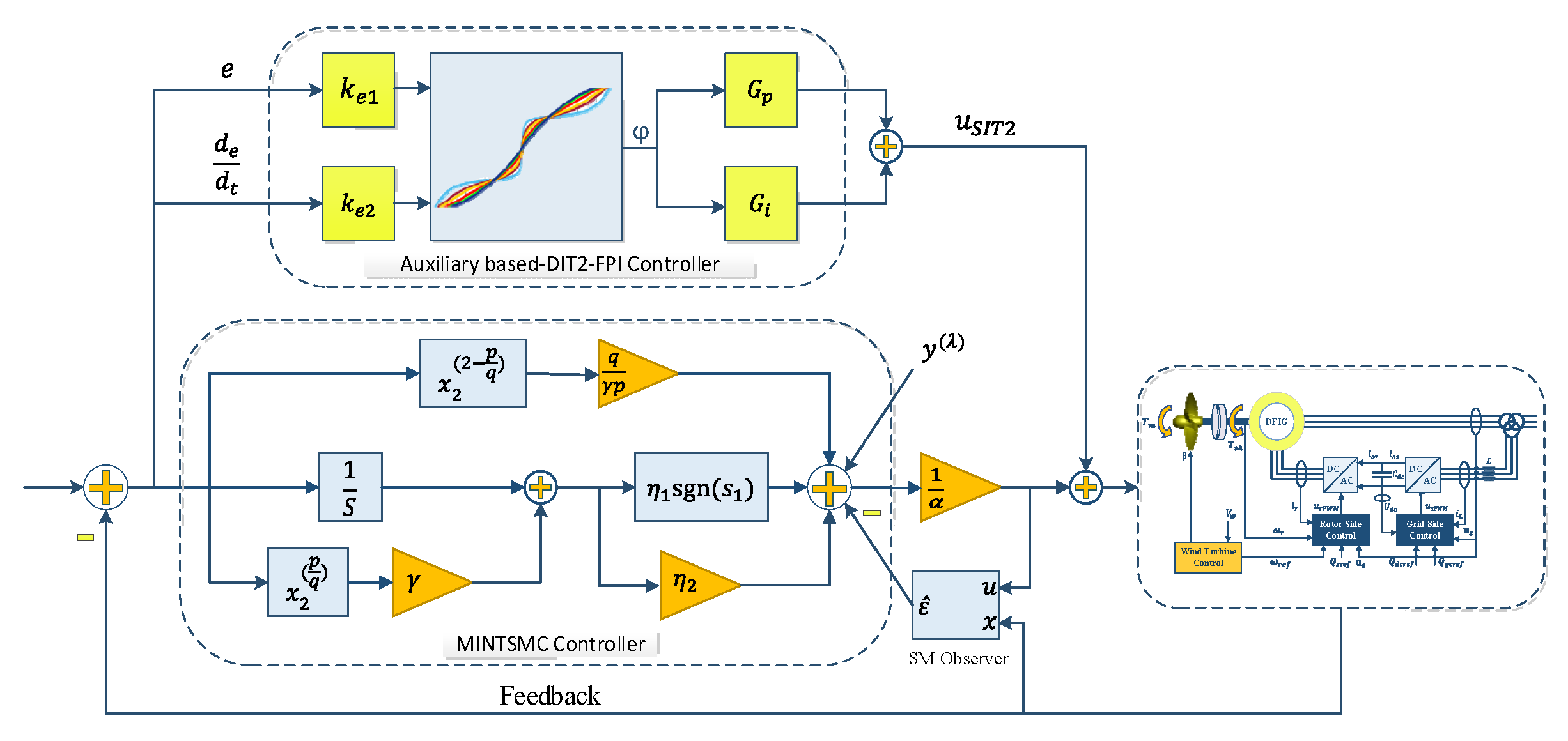
- A MINTSMC controller with SM observer was adopted for the internal loop control of RSC in a DFIG WT test system.
- An auxiliary DIT2-FLC controller was established to improve the DFIG performance and eliminate the SM observer estimation error.
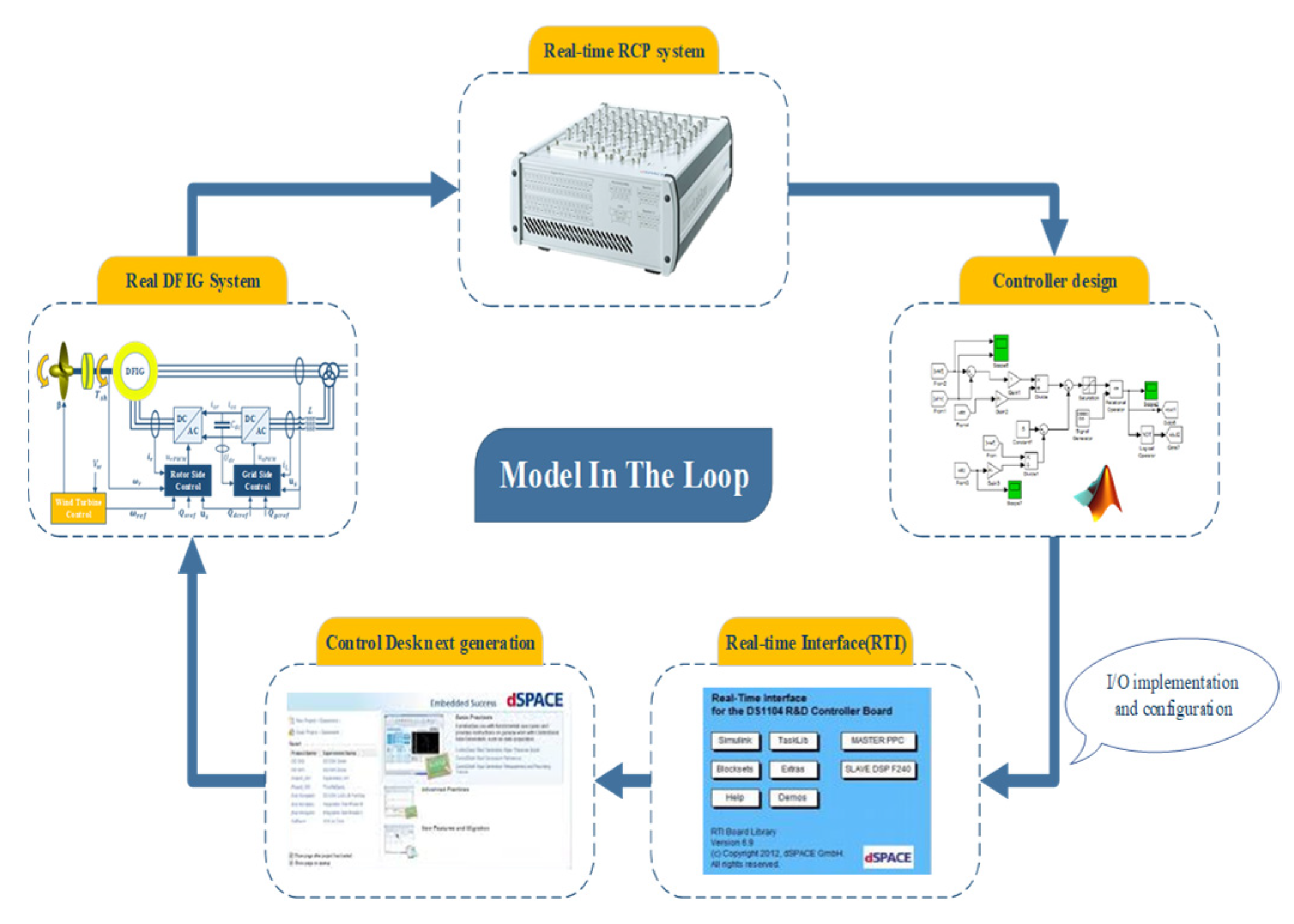
- The comprehensive real-time model-in-the-loop (RT-MiL) examinations were made to validate the applicability of the suggested MINTSMC based DIT2-FLC controller in a real-time testbed.
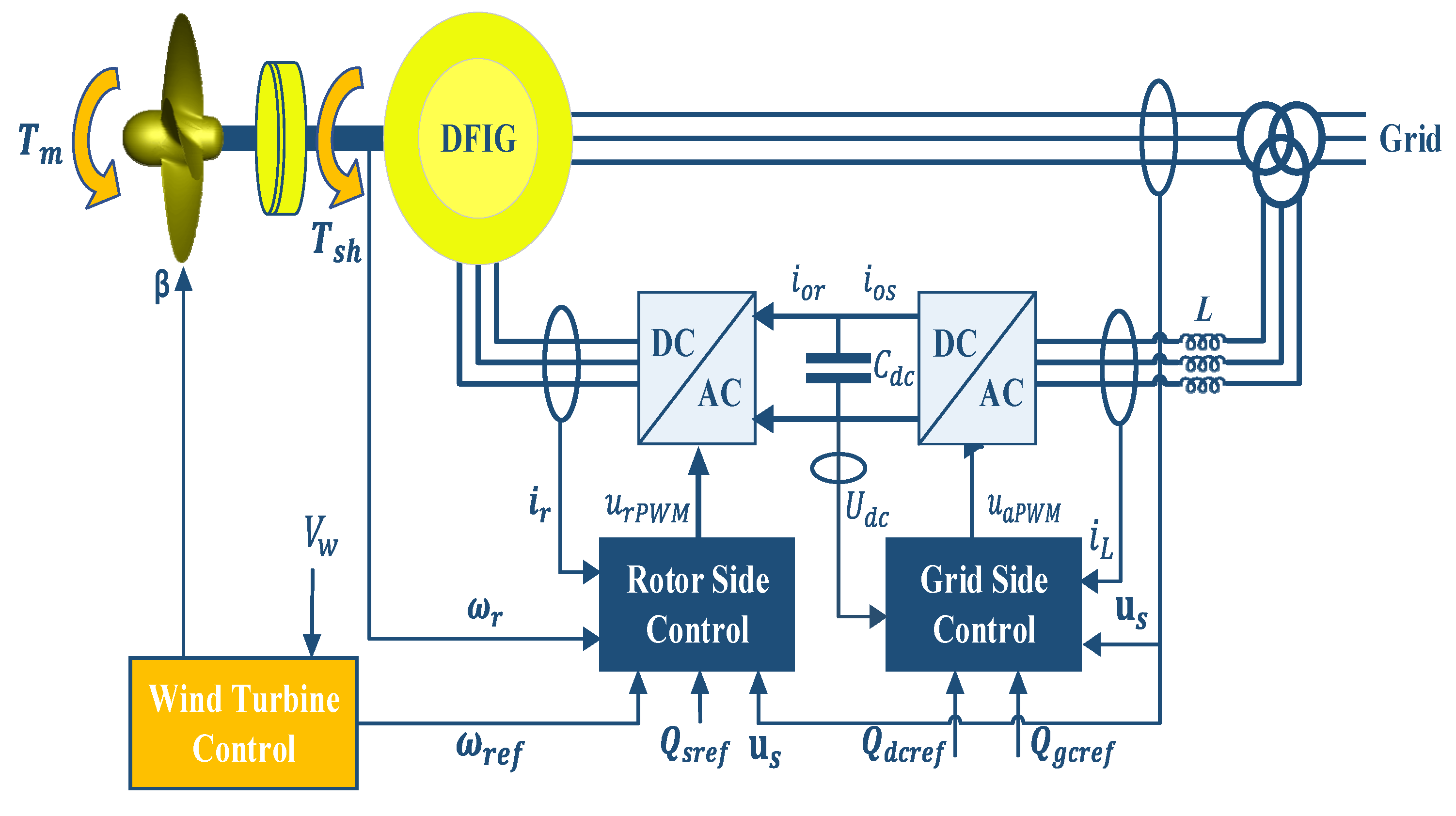
2. Modeling of DFIG WT Test-System
2.1. Modeling of the Generator System
2.2. Modeling of the Drive Train System
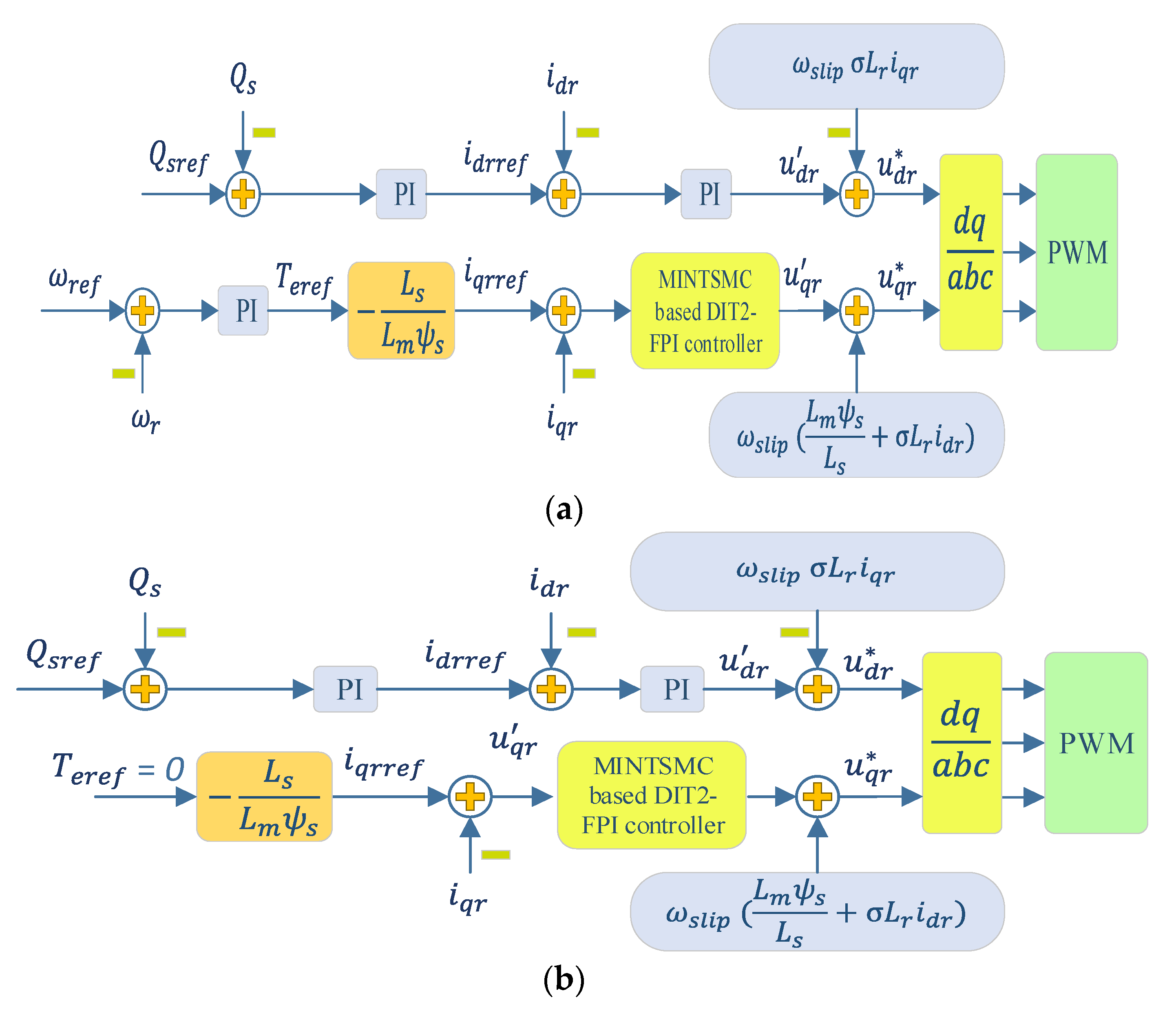
2.3. Rotor Side Converter (RSC) Control
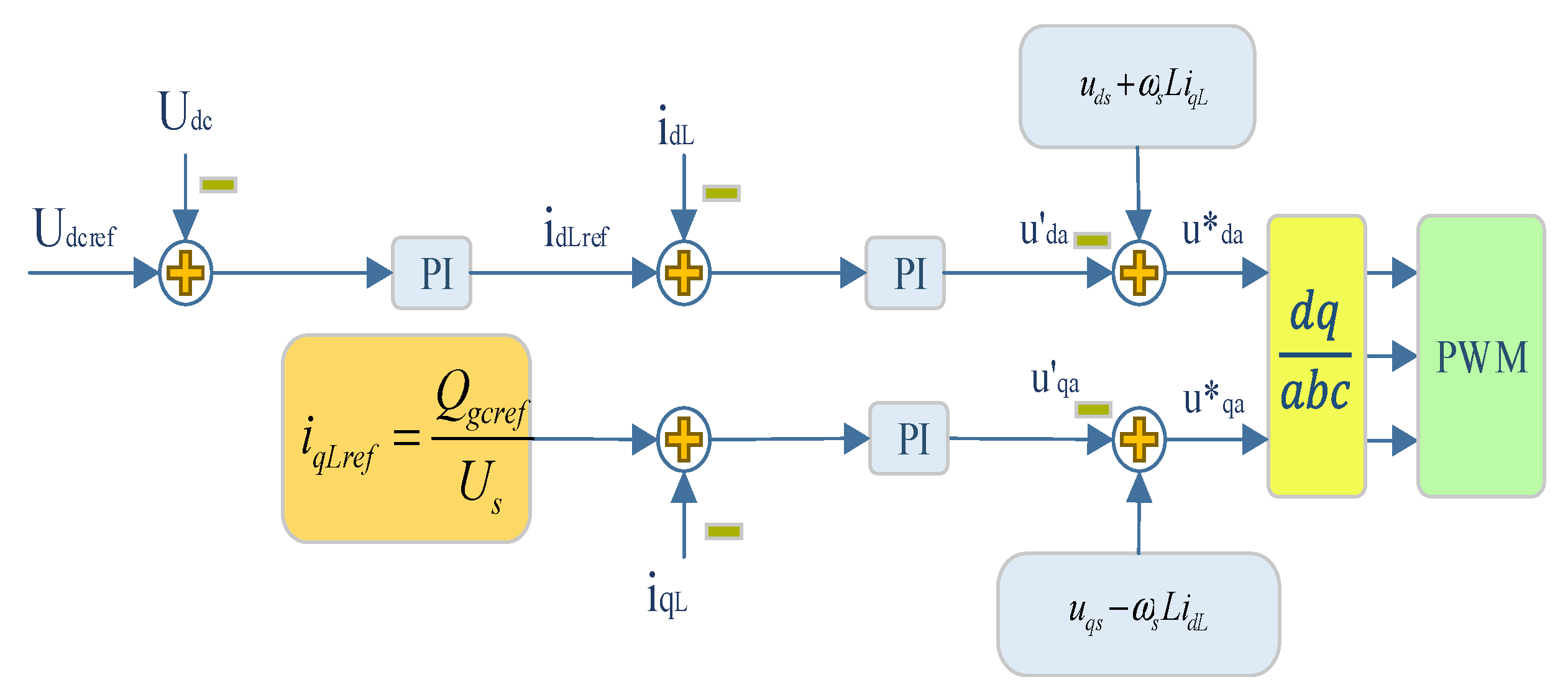
2.4. Grid Side Converter (GSC) Control
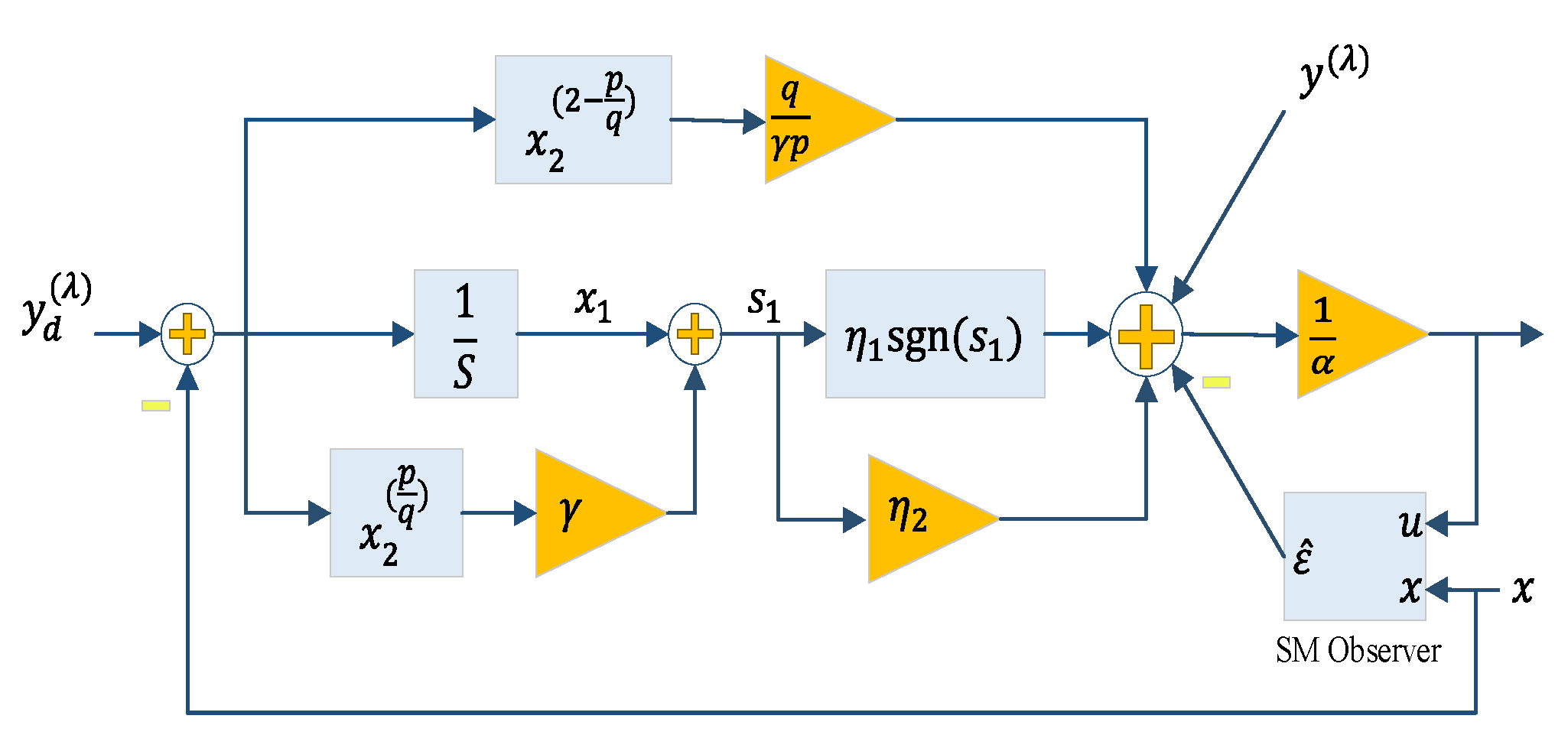
3. Design of Model-Independent NTSMC Based DIT2-FLC
3.1. Model-Independent NTSMC Technique
3.2. Design of SM Observer
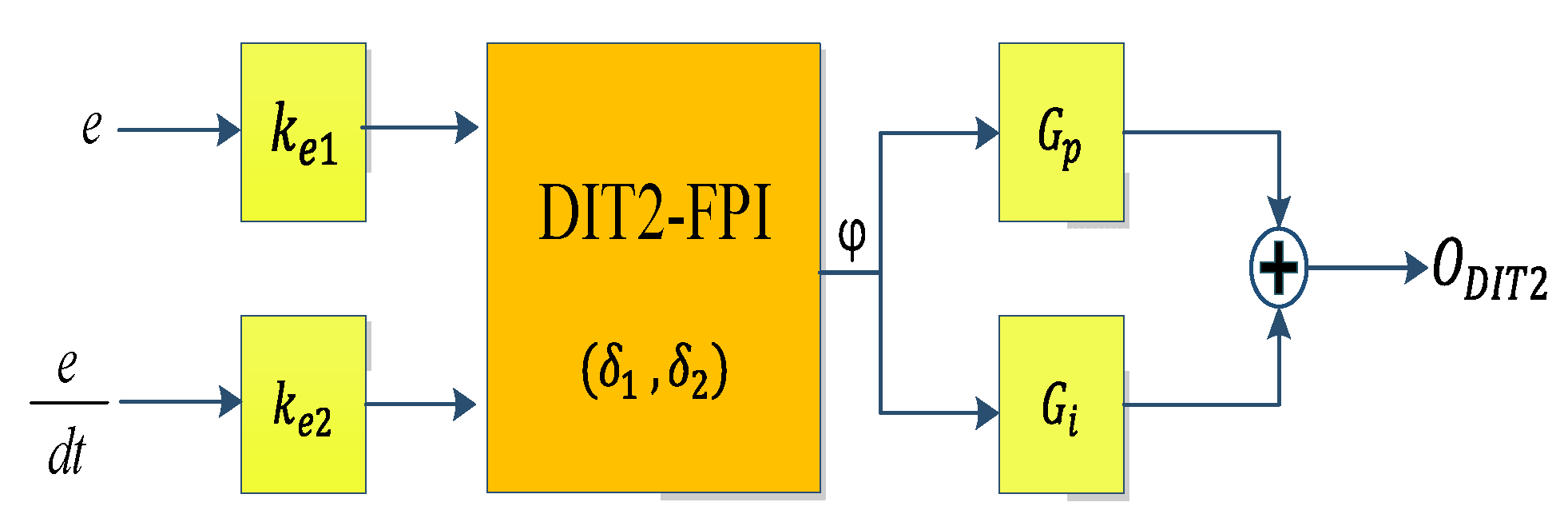
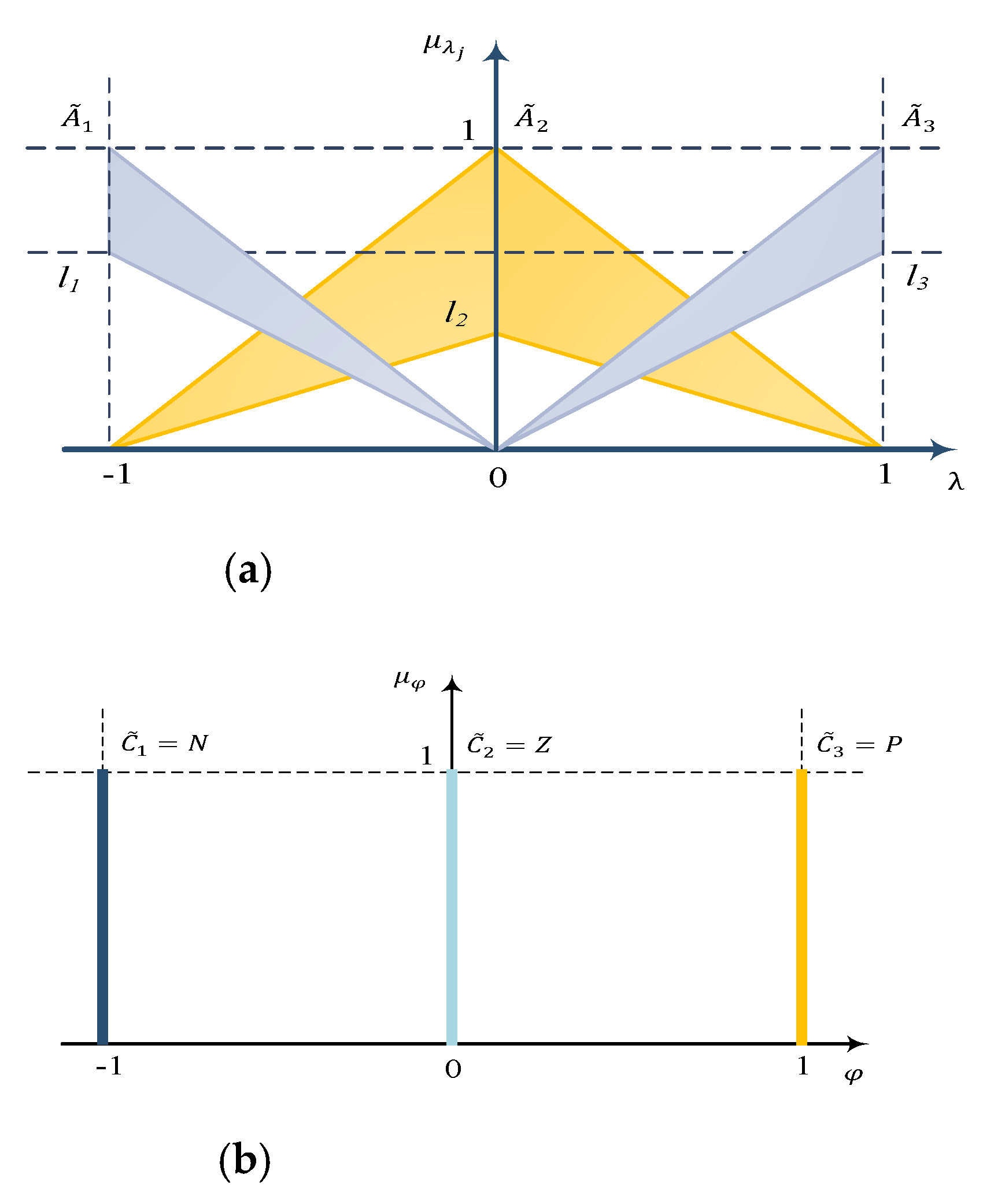
3.3. Dual Input Interval Type 2 FLC
3.3.1. General Structure of Dual Input IT2-FL
3.3.2. DIT2-FL Design Strategy
3.4. The Strategy of MINTSMC Based DIT2-FPI Scheme
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hu, J.; Nian, H.; Xu, H.; He, Y. Dynamic modeling and improved control of DFIG under distorted grid voltage conditions. IEEE Trans. Energy Convers. 2010, 26, 163–175. [Google Scholar] [CrossRef]
- Moghadam, H.M.; Gheisarnejad, M.; Esfahani, Z.; Khooban, M.-H. A Novel Supervised Control Strategy for Interconnected DFIG-Based Wind Turbine Systems: MiL Validations. IEEE Trans. Emerg. Top. Comput. Intell. 2020. [Google Scholar] [CrossRef]
- Abrazeh, S.; Parvaresh, A.; Mohseni, S.-R.; Zeitouni, M.J.; Gheisarnejad, M.; Khooban, M.H. Nonsingular Terminal Sliding Mode Control With Ultra-Local Model and Single Input Interval Type-2 Fuzzy Logic Control for Pitch Control of Wind Turbines. IEEE/CAA J. Autom. Sin. 2021, 8, 690–700. [Google Scholar] [CrossRef]
- Zeitouni, M.J.; Parvaresh, A.; Abrazeh, S.; Mohseni, S.-R.; Gheisarnejad, M.; Khooban, M.-H. Digital twins-assisted design of next-generation advanced controllers for power systems and electronics: Wind turbine as a case study. Inventions 2020, 5, 19. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Mohammadi-Moghadam, H.; Boudjadar, J.; Khooban, M.H. Active power sharing and frequency recovery control in an islanded microgrid with nonlinear load and nondispatchable DG. IEEE Syst. J. 2019, 14, 1058–1068. [Google Scholar] [CrossRef]
- Conroy, J.F.; Watson, R. Low-voltage ride-through of a full converter wind turbine with permanent magnet generator. IET Renew. Power Gener. 2007, 1, 182–189. [Google Scholar] [CrossRef]
- Abbey, C.; Joos, G. Effect of low voltage ride through (LVRT) characteristic on voltage stability. In Proceedings of the IEEE Power Engineering Society General Meeting, San Francisco, CA, USA, 12–16 June 2005; pp. 1901–1907. [Google Scholar]
- Parvaresh, A.; Abrazeh, S.; Mohseni, S.-R.; Zeitouni, M.J.; Gheisarnejad, M.; Khooban, M.-H. A Novel Deep Learning Backstepping Controller-Based Digital Twins Technology for Pitch Angle Control of Variable Speed Wind Turbine. Designs 2020, 4, 15. [Google Scholar] [CrossRef]
- Zhou, L.; Swain, A.; Ukil, A. Reinforcement learning controllers for enhancement of low voltage ride through capability in hybrid power systems. IEEE Trans. Ind. Inform. 2019, 16, 5023–5031. [Google Scholar] [CrossRef]
- Wen, G.; Chen, Y.; Zhong, Z.; Kang, Y. Dynamic voltage and current assignment strategies of nine-switch-converter-based DFIG wind power system for low-voltage ride-through (LVRT) under symmetrical grid voltage dip. IEEE Trans. Ind. Appl. 2016, 52, 3422–3434. [Google Scholar] [CrossRef]
- Heydari-Doostabad, H.; Khalghani, M.R.; Khooban, M.H. A novel control system design to improve LVRT capability of fixed speed wind turbines using STATCOM in presence of voltage fault. Int. J. Electr. Power Energy Syst. 2016, 77, 280–286. [Google Scholar] [CrossRef]
- Peng, Z.; Yikang, H. Control strategy of an active crowbar for DFIG based wind turbine under grid voltage dips. In Proceedings of the 2007 International Conference on Electrical Machines and Systems (ICEMS), Seoul, Korea, 8–11 October 2007; pp. 259–264. [Google Scholar]
- Rahimi, M.; Parniani, M. Low voltage ride-through capability improvement of DFIG-based wind turbines under unbalanced voltage dips. Int. J. Electr. Power Energy Syst. 2014, 60, 82–95. [Google Scholar] [CrossRef]
- Song, Z.; Xia, C.; Shi, T. Assessing transient response of DFIG based wind turbines during voltage dips regarding main flux saturation and rotor deep-bar effect. Appl. Energy 2010, 87, 3283–3293. [Google Scholar] [CrossRef]
- Abdou, A.F.; Abu-Siada, A.; Pota, H.R. Application of STATCOM to improve the LVRT of DFIG during RSC fire-through fault. In Proceedings of the 2012 22nd Australasian Universities Power Engineering Conference (AUPEC), Bali, Indonesia, 26–29 September 2012; pp. 1–6. [Google Scholar]
- Zheng, Z.-X.; Huang, C.-J.; Yang, R.-H.; Xiao, X.-Y.; Li, C.-S. A low voltage ride through scheme for DFIG-based wind farm with SFCL and RSC control. IEEE Trans. Appl. Supercond. 2019, 29, 1–5. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Faraji, B.; Esfahani, Z.; Khooban, M.-H. A Close loop multi-area brain stimulation control for Parkinson’s Patients Rehabilitation. IEEE Sens. J. 2019, 20, 2205–2213. [Google Scholar] [CrossRef]
- Beltran, B.; Benbouzid, M.E.H.; Ahmed-Ali, T. Second-order sliding mode control of a doubly fed induction generator driven wind turbine. IEEE Trans. Energy Convers. 2012, 27, 261–269. [Google Scholar] [CrossRef] [Green Version]
- Morshed, M.J.; Fekih, A. Integral terminal sliding mode control to provide fault ride-through capability to a grid connected wind turbine driven DFIG. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 1059–1064. [Google Scholar]
- Wang, J.; Li, S.; Yang, J.; Wu, B.; Li, Q. Finite-time disturbance observer based non-singular terminal sliding-mode control for pulse width modulation based DC–DC buck converters with mismatched load disturbances. IET Power Electron. 2016, 9, 1995–2002. [Google Scholar] [CrossRef]
- Rajendran, S.; Jena, D. Adaptive nonsingular terminal sliding mode control for variable speed wind turbine. In Proceedings of the 2015 IEEE 28th Canadian Conference on Electrical and Computer Engineering (CCECE), Halifax, NS, Canada, 3–6 May 2015; pp. 937–942. [Google Scholar]
- Abolvafaei, M.; Ganjefar, S. Maximum power extraction from a wind turbine using second-order fast terminal sliding mode control. Renew. Energy 2019, 139, 1437–1446. [Google Scholar] [CrossRef]
- Ahmed, S.; Wang, H.; Tian, Y. Model-free control using time delay estimation and fractional-order nonsingular fast terminal sliding mode for uncertain lower-limb exoskeleton. J. Vib. Control 2018, 24, 5273–5290. [Google Scholar] [CrossRef]
- Kumar, A.; Kumar, V. Performance analysis of optimal hybrid novel interval type-2 fractional order fuzzy logic controllers for fractional order systems. Expert Syst. Appl. 2018, 93, 435–455. [Google Scholar] [CrossRef]
- Kumar, A.; Kumar, V. A novel interval type-2 fractional order fuzzy PID controller: Design, performance evaluation, and its optimal time domain tuning. ISA Trans. 2017, 68, 251–275. [Google Scholar] [CrossRef] [PubMed]
- Hamza, M.F.; Yap, H.J.; Choudhury, I.A. Cuckoo search algorithm based design of interval Type-2 Fuzzy PID Controller for Furuta pendulum system. Eng. Appl. Artif. Intell. 2017, 62, 134–151. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Khooban, M.H. Design an optimal fuzzy fractional proportional integral derivative controller with derivative filter for load frequency control in power systems. Trans. Inst. Meas. Control 2019, 41, 2563–2581. [Google Scholar] [CrossRef]
- Mosayebi, M.; Gheisarnejad, M.; Khooban, M.-H. An Intelligent Type-2 Fuzzy Stabilization of Multi-DC Nano Power Grids. IEEE Trans. Emerg. Top. Comput. Intell. 2020. [Google Scholar] [CrossRef]
- Kumar, A.; Kumar, V. Evolving an interval type-2 fuzzy PID controller for the redundant robotic manipulator. Expert Syst. Appl. 2017, 73, 161–177. [Google Scholar] [CrossRef]
- Kumbasar, T.; Hagras, H. Big Bang–Big Crunch optimization based interval type-2 fuzzy PID cascade controller design strategy. Inf. Sci. 2014, 282, 277–295. [Google Scholar] [CrossRef]
- Li, H.; Wu, C.; Shi, P.; Gao, Y. Control of nonlinear networked systems with packet dropouts: Interval type-2 fuzzy model-based approach. IEEE Trans. Cybern. 2014, 45, 2378–2389. [Google Scholar] [CrossRef] [PubMed]
- Zeghlache, S.; Kara, K.; Saigaa, D. Fault tolerant control based on interval type-2 fuzzy sliding mode controller for coaxial trirotor aircraft. ISA Trans. 2015, 59, 215–231. [Google Scholar] [CrossRef]
- Moghadam, H.M.; Khooban, M.H.; Dragicevic, T.; Masoudian, A. Using Interval Type2 Fuzzy Controller in Ship Power Systems in Presence of Pulsed Power Loads. In Proceedings of the 2018 IEEE International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Nottingham, UK, 7–9 November 2018; pp. 1–6. [Google Scholar]
- Sarabakha, A.; Fu, C.; Kayacan, E.; Kumbasar, T. Type-2 fuzzy logic controllers made even simpler: From design to deployment for UAVs. IEEE Trans. Ind. Electron. 2017, 65, 5069–5077. [Google Scholar] [CrossRef]
- Kumbasar, T. Robust stability analysis and systematic design of single-input interval type-2 fuzzy logic controllers. IEEE Trans. Fuzzy Syst. 2015, 24, 675–694. [Google Scholar] [CrossRef]
- Heydari, R.; Gheisarnejad, M.; Khooban, M.H.; Dragicevic, T.; Blaabjerg, F. Robust and fast voltage-source-converter (VSC) control for naval shipboard microgrids. IEEE Trans. Power Electron. 2019, 34, 8299–8303. [Google Scholar] [CrossRef] [Green Version]
- Sarabakha, A.; Fu, C.; Kayacan, E. Double-input interval type-2 fuzzy logic controllers: Analysis and design. In Proceedings of the 2017 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Naples, Italy, 9–12 July 2017; pp. 1–6. [Google Scholar]
- Beke, A.; Kumbasar, T. Single vs. double input interval type-2 fuzzy PID controllers: Which one is better? In Proceedings of the 2018 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–7. [Google Scholar]
- Sarabakha, A.; Fu, C.; Kayacan, E. Intuit before tuning: Type-1 and type-2 fuzzy logic controllers. Appl. Soft Comput. 2019, 81, 105495. [Google Scholar] [CrossRef]
- Mei, F.; Pal, B. Modal analysis of grid-connected doubly fed induction generators. IEEE Trans. Energy Convers. 2007, 22, 728–736. [Google Scholar] [CrossRef] [Green Version]
- Wu, F.; Zhang, X.-P.; Godfrey, K.; Ju, P. Small signal stability analysis and optimal control of a wind turbine with doubly fed induction generator. IET Gener. Transm. Distrib. 2007, 1, 751–760. [Google Scholar] [CrossRef]
- Yang, L.; Xu, Z.; Ostergaard, J.; Dong, Z.Y.; Wong, K.P. Advanced control strategy of DFIG wind turbines for power system fault ride through. IEEE Trans. Power Syst. 2011, 27, 713–722. [Google Scholar] [CrossRef] [Green Version]
- Pena, R.; Clare, J.; Asher, G. Doubly fed induction generator using back-to-back PWM converters and its application to variable-speed wind-energy generation. IEE Proc. Electr. Power Appl. 1996, 143, 231–241. [Google Scholar] [CrossRef] [Green Version]
- Agee, J.T.; Kizir, S.; Bingul, Z. Intelligent proportional-integral (iPI) control of a single link flexible joint manipulator. J. Vib. Control 2015, 21, 2273–2288. [Google Scholar] [CrossRef]
- Abouaïssa, H.; Chouraqui, S. On the control of robot manipulator: A model-free approach. J. Comput. Sci. 2019, 31, 6–16. [Google Scholar] [CrossRef]
- Zhao, K.; Yin, T.; Zhang, C.; He, J.; Li, X.; Chen, Y.; Zhou, R.; Leng, A. Robust model-free nonsingular terminal sliding mode control for PMSM demagnetization fault. IEEE Access 2019, 7, 15737–15748. [Google Scholar] [CrossRef]
- Mehndiratta, M.; Kayacan, E.; Kumbasar, T. Design and experimental validation of single input type-2 fuzzy PID controllers as applied to 3 DOF helicopter testbed. In Proceedings of the 2016 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Vancouver, BC, Canada, 24–29 July 2016; pp. 1584–1591. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | Z | P | |
|---|---|---|---|
| N | N | N | Z |
| Z | N | Z | P |
| P | Z | P | P |
| Region | Description |
|---|---|
| Parameter | Value | Unit |
|---|---|---|
| DC link Capacitor | 10 | |
| Rated power | 250 | |
| Rated voltage | 575 | |
| Rated frequency | 50 | |
| Rated current | 185 | |
| Number of poles | 4 | ---- |
| Stator resistor | 20 | |
| Stator leakage inductor | 0.2 | |
| Rotor resistor | 20 | |
| Rotor leakage inductor | 0.2 | |
| Magnetizing inductor | 4.2 | |
| Inertia | 0.685 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammadi Moghadam, H.; Gheisarnejad, M.; Yalsavar, M.; Foroozan, H.; Khooban, M.-H. A Novel Nonsingular Terminal Sliding Mode Control-Based Double Interval Type-2 Fuzzy Systems: Real-Time Implementation. Inventions 2021, 6, 40. https://0-doi-org.brum.beds.ac.uk/10.3390/inventions6020040
Mohammadi Moghadam H, Gheisarnejad M, Yalsavar M, Foroozan H, Khooban M-H. A Novel Nonsingular Terminal Sliding Mode Control-Based Double Interval Type-2 Fuzzy Systems: Real-Time Implementation. Inventions. 2021; 6(2):40. https://0-doi-org.brum.beds.ac.uk/10.3390/inventions6020040
Chicago/Turabian StyleMohammadi Moghadam, Hooman, Meysam Gheisarnejad, Maryam Yalsavar, Hossein Foroozan, and Mohammad-Hassan Khooban. 2021. "A Novel Nonsingular Terminal Sliding Mode Control-Based Double Interval Type-2 Fuzzy Systems: Real-Time Implementation" Inventions 6, no. 2: 40. https://0-doi-org.brum.beds.ac.uk/10.3390/inventions6020040