
Exploring Performances of Electric Micro-Mobility Vehicles and Behavioural Patterns of Riders for In-Depth Accident Analysis


Abstract
:1. Introduction
- To draw up a precise picture regarding the accident dynamics, depending on the evidence collected in situ.
- Formulate theses on collision evitability starting from typical travel times of riders for some road sections; for instance, starting from the point of impact and the assistance level, the position of the vehicle at the beginning of the critical scenario can be deduced, as well as its visibility from the opponent’s perspective.
- Assess the compliance of the vehicle motor-assistance system assembly to current regulations (e.g., Regulation 168/2013 by the European Community); this operation is often complicated by the vehicle seizing conditions, which conflict with the operator’s need to access the key elements for verification.
2. Testing Campaigns
2.1. Closed-Circuit Tests
- At the beginning of the test, the personnel activated the G-sensor Logger© application on the smartphone rigidly connected to the e-bike;
- The participant set the assistance level to ‘0’ and the first gear for the e-bike;
- From the application home, the personnel activated the acquisition of the accelerometer data;
- The participant accelerated as he/she would typically do up to a point 12 m away from the start, briefly maintained a constant speed and then hard braked, stopping at a point 20 m away from the start (these distance values are sufficient to clearly identify the different portions of an acquired signal that correspond to acceleration, constant speed and deceleration);
- The personnel interrupted the acquisition of the accelerometer data, causing the automatic saving of the acquired signal;
- The participant set the upper gear without changing the assistance level;
- Steps 3–6 were repeated until the participant used the last available gear;
- The assistance level was increased by a unit, repeating steps 3–7 until all gears and assistance levels were used.
- Time required to reach the maximum speed (t);
- Maximum reached speed ();
- Distance travelled to reach the maximum speed (s);
- Average acceleration of the test ();
- Speed reached after 2, 4, 6, 8, 10 and 12 m from the start (V2m, V4m, V6m, V8m, V10m, V12m;
- Acceleration at 2, 4, 6, 8, 10 and 12 m from the start (a2m, a4m, a6m, a8m, a10m, a12m).
2.2. Real Road Tests
- Section 1: road where the cyclist does not have the right of way (following European regulations);
- Section 2: road where the cyclist has the right of way (following European regulations);
- Section 3: road characterized by two consecutive roundabouts.
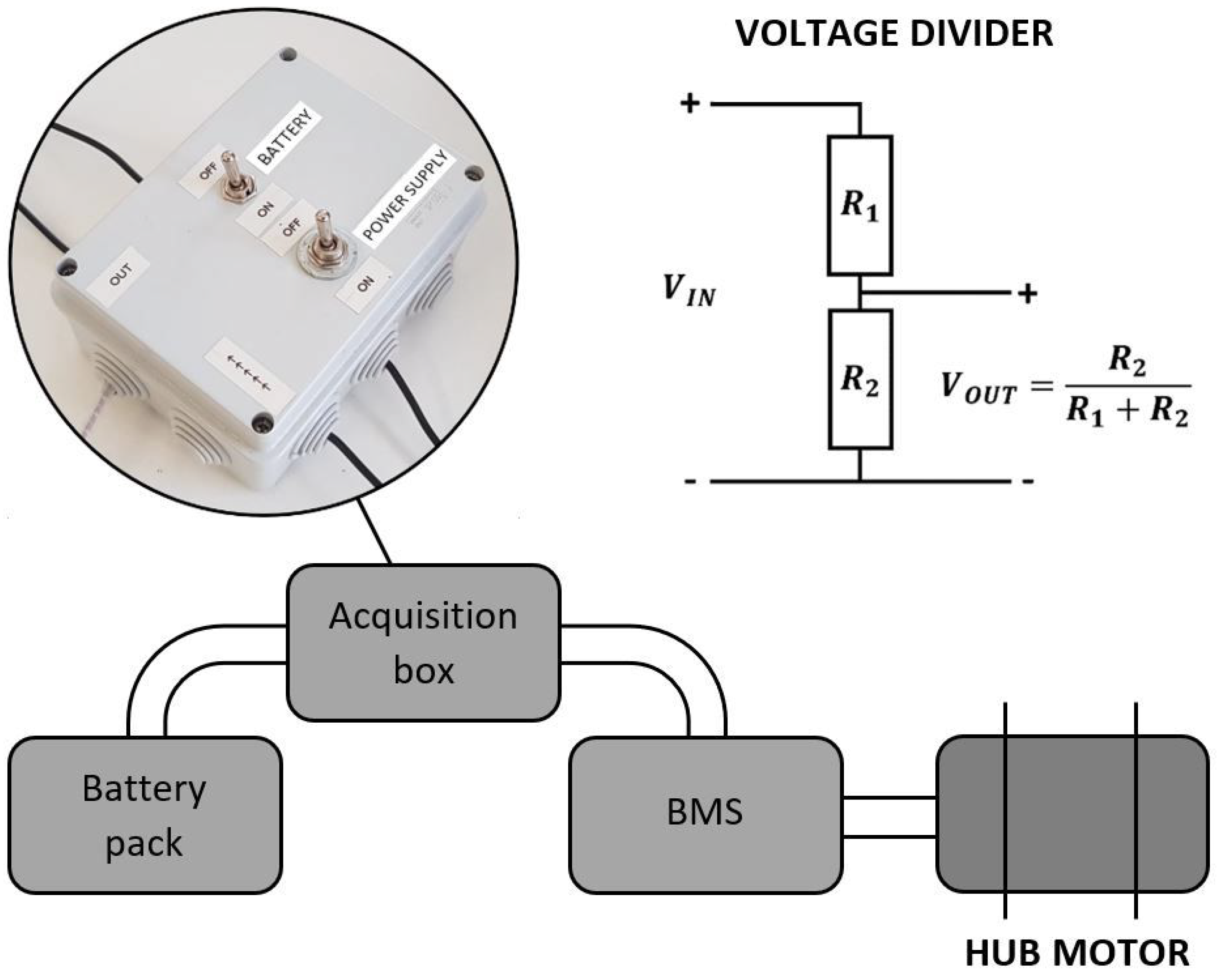
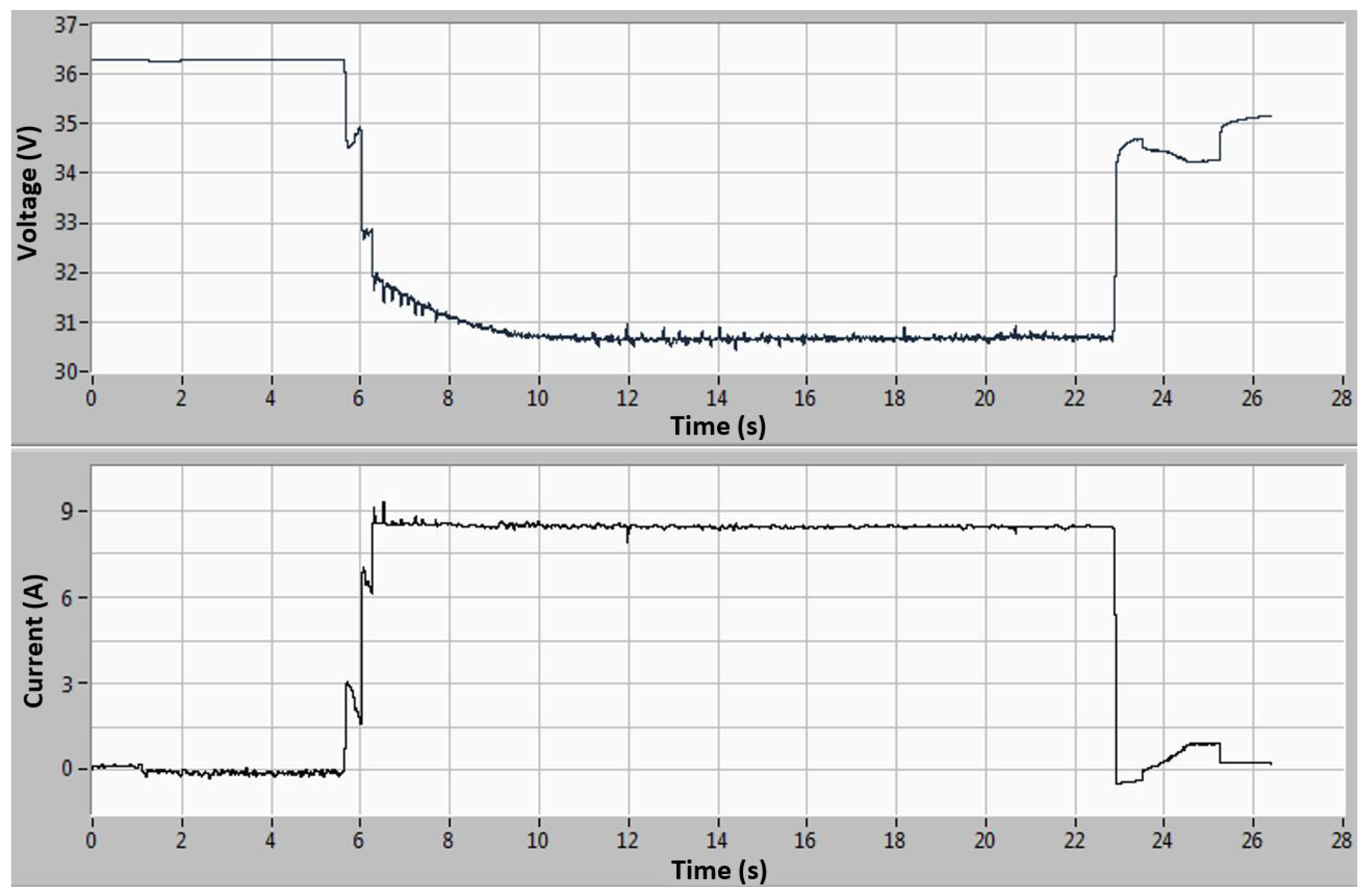
3. Verification of Electric Microvehicles’ Compliance to International Regulations
4. Limitations
5. Conclusions
- Outline a precise scenario regarding accident dynamics: real road tests carried out by e-bikes were performed to define the speed and behaviours with which a rider tackles specific conditions (roads with/without right of way, roundabouts, standing start and stop); such in-depth highlights can be used to increase road safety in a ‘what if’ approach: hypothesizing appropriate modifications to vehicles, infrastructure, and viability, alternatives can be proposed to lower the users’ involvement in critical scenarios. Since campaigns with null assistance for the e-bike were performed, these considerations also apply to traditional bike-related accidents. Analytical relations have been provided, which allow for calculation of acceleration and speed in specific points of a trajectory; this enables one to observe the event dynamics from the user’s perspective, as a function of their gender, employed assistance level and gear, etc. In standing start conditions, data show that women tend to adopt speeds and accelerations which are significantly lower compared to men. In real-road scenarios, the cyclist tends to travel at a higher speed in correspondence to roads with the right of way; additionally, the highest differences between a traditional bike and an e-bike are observed in correspondence to roundabouts where the rider is required to modulate their gait rather than stopping, based on the occurring hazards. Conversely, because of the greater simplicity of e-scooters, no specific testing campaign has been carried out for the performance identification of this type of vehicle: the behaviour of riders on real roads is comparable to the case of e-bike employment; it is also worth noting that, in cases of standing start and the maximum degree of assistance, a constant acceleration close to 0.6 m/s2 can be reasonably assumed for e-scooters.
- Assess the compliance of the motor assistance system assembly to the various regulations on the topic (European or not), without the need to directly access the motor. This enables one to highlight the possible inadequacy of the vehicle that would prevent its circulation by a simple, effective system which can be used regardless of the seizing conditions of the vehicle; in particular, it is suggested to monitor the power in the most stressful conditions for the battery, for example, along uphill roads. If the vehicle does not comply with the applicable regulations, the rider’s risky behaviour alone cannot be indicated as the main factor contributing to the accident; up to now, no recognized method was available to identify non-compliant vehicles. Because of regulation differences among nations, a declaration by the manufacturer is not always a sufficiently reliable datum.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Stenner, H.T.; Boyen, J.; Hein, M.; Protte, G.; Kück, M.; Finkel, A.; Hanke, A.A.; Tegtbur, U. Everyday Pedelec Use and Its Effect on Meeting Physical Activity Guidelines. Int. J. Environ. Res. Public Health 2020, 17, 4807. [Google Scholar] [CrossRef]
- Fyhri, A.; Beate Sundfør, H. Do People Who Buy E-Bikes Cycle More? Transp. Res. Part D Transp. Environ. 2020, 86, 102422. [Google Scholar] [CrossRef]
- McQueen, M.; MacArthur, J.; Cherry, C. The E-Bike Potential: Estimating Regional e-Bike Impacts on Greenhouse Gas Emissions. Transp. Res. Part D Transp. Environ. 2020, 87, 102482. [Google Scholar] [CrossRef]
- Laa, B.; Leth, U. Survey of E-Scooter Users in Vienna: Who They Are and How They Ride. J. Transp. Geogr. 2020, 89, 102874. [Google Scholar] [CrossRef]
- Sanders, R.L.; Branion-Calles, M.; Nelson, T.A. To Scoot or Not to Scoot: Findings from a Recent Survey about the Benefits and Barriers of Using E-Scooters for Riders and Non-Riders. Transp. Res. Part A Policy Pract. 2020, 139, 217–227. [Google Scholar] [CrossRef]
- Petzoldt, T.; Schleinitz, K.; Heilmann, S.; Gehlert, T. Traffic Conflicts and Their Contextual Factors When Riding Conventional vs. Electric Bicycles. Transp. Res. Part F Traffic Psychol. Behav. 2017, 46, 477–490. [Google Scholar] [CrossRef]
- Rodon, C.; Ragot-Court, I. Assessment of Risky Behaviours among E-Bike Users: A Comparative Study in Shanghai. Transp. Res. Interdiscip. Perspect. 2019, 2, 100042. [Google Scholar] [CrossRef]
- Haustein, S.; Møller, M. E-Bike Safety: Individual-Level Factors and Incident Characteristics. J. Transp. Health 2016, 3, 386–394. [Google Scholar] [CrossRef]
- Ma, C.; Yang, D.; Zhou, J.; Feng, Z.; Yuan, Q. Risk Riding Behaviors of Urban E-Bikes: A Literature Review. Int. J. Environ. Res. Public Health 2019, 16, 2308. [Google Scholar] [CrossRef]
- Zagorskas, J.; Burinskienė, M. Challenges Caused by Increased Use of E-Powered Personal Mobility Vehicles in European Cities. Sustainability 2019, 12, 273. [Google Scholar] [CrossRef]
- Dozza, M.; Bianchi Piccinini, G.F.; Werneke, J. Using Naturalistic Data to Assess E-Cyclist Behavior. Transp. Res. Part F Traffic Psychol. Behav. 2016, 41, 217–226. [Google Scholar] [CrossRef]
- Cherry, C.R.; Yang, H.; Jones, L.R.; He, M. Dynamics of Electric Bike Ownership and Use in Kunming, China. Transp. Policy 2016, 45, 127–135. [Google Scholar] [CrossRef]
- Bai, L.; Liu, P.; Chen, Y.; Zhang, X.; Wang, W. Comparative Analysis of the Safety Effects of Electric Bikes at Signalized Intersections. Transp. Res. Part D Transp. Environ. 2013, 20, 48–54. [Google Scholar] [CrossRef]
- Cairns, S.; Behrendt, F.; Raffo, D.; Beaumont, C.; Kiefer, C. Electrically-Assisted Bikes: Potential Impacts on Travel Behaviour. Transp. Res. Part A Policy Pract. 2017, 103, 327–342. [Google Scholar] [CrossRef]
- Liu, L.; Suzuki, T. Quantifying E-Bike Applicability by Comparing Travel Time and Physical Energy Expenditure: A Case Study of Japanese Cities. J. Transp. Health 2019, 13, 150–163. [Google Scholar] [CrossRef]
- Langford, B.C.; Cherry, C.R.; Bassett, D.R.; Fitzhugh, E.C.; Dhakal, N. Comparing Physical Activity of Pedal-Assist Electric Bikes with Walking and Conventional Bicycles. J. Transp. Health 2017, 6, 463–473. [Google Scholar] [CrossRef]
- Eccarius, T.; Lu, C.C. Adoption Intentions for Micro-Mobility—Insights from Electric Scooter Sharing in Taiwan. Transp. Res. Part D Transp. Environ. 2020, 84, 102327. [Google Scholar] [CrossRef]
- Ruhrort, L. Reassessing the Role of Shared Mobility Services in a Transport Transition: Can They Contribute the Rise of an Alternative Socio-Technical Regime of Mobility? Sustainability 2020, 12, 8253. [Google Scholar] [CrossRef]
- Schleinitz, K.; Petzoldt, T.; Krems, J.F.; Gehlert, T. The Influence of Speed, Cyclists’ Age, Pedaling Frequency, and Observer Age on Observers’ Time to Arrival Judgments of Approaching Bicycles and e-Bikes. Accid. Anal. Prev. 2016, 92, 113–121. [Google Scholar] [CrossRef] [PubMed]
- Vlakveld, W.P.; Twisk, D.; Christoph, M.; Boele, M.; Sikkema, R.; Remy, R.; Schwab, A.L. Speed Choice and Mental Workload of Elderly Cyclists on E-Bikes in Simple and Complex Traffic Situations: A Field Experiment. Accid. Anal. Prev. 2015, 74, 97–106. [Google Scholar] [CrossRef] [PubMed]
- Blomberg, S.N.F.; Rosenkrantz, O.C.M.; Lippert, F.; Collatz Christensen, H. Injury from Electric Scooters in Copenhagen: A Retrospective Cohort Study. BMJ Open 2019, 9, e033988. [Google Scholar] [CrossRef]
- Siman-Tov, M.; Radomislensky, I.; Israel Trauma Group; Peleg, K. The Casualties from Electric Bike and Motorized Scooter Road Accidents. Traffic Inj. Prev. 2017, 18, 318–323. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Neitzel, R.L.; Xue, X.; Zheng, W.; Jiang, G. Awareness, Riding Behaviors, and Legislative Attitudes toward Electric Bikes among Two Types of Road Users: An Investigation in Tianjin, a Municipality in China. Traffic Inj. Prev. 2019, 20, 72–78. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Xie, S.; Ye, X.; Yan, X.; Chen, J.; Li, W. Analyzing E-Bikers’ Risky Riding Behaviors, Safety Attitudes, Risk Perception, and Riding Confidence with the Structural Equation Model. Int. J. Environ. Res. Public Health 2020, 17, 4763. [Google Scholar] [CrossRef] [PubMed]
- Huertas-Leyva, P.; Dozza, M.; Baldanzini, N. E-Bikers’ Braking Behavior: Results from a Naturalistic Cycling Study. Traffic Inj. Prev. 2019, 20, 62–67. [Google Scholar] [CrossRef]
- Otte, D.; Facius, T. Accident Typology Comparisons between Pedelecs and Conventional Bicycles. J. Transp. Saf. Secur. 2020, 12, 116–135. [Google Scholar] [CrossRef]
- Lin, Z.; Fan, W.D. Cyclist Injury Severity Analysis with Mixed-Logit Models at Intersections and Nonintersection Locations. J. Transp. Saf. Secur. 2021, 13, 223–245. [Google Scholar] [CrossRef]
- Kovácsová, N.; Vlakveld, W.; de Winter, J.; Hagenzieker, M. PC-Based Hazard Anticipation Training for Experienced Cyclists: Design and Evaluation. Saf. Sci. 2020, 123, 104561. [Google Scholar] [CrossRef]
- Serge, A.; Quiroz Montoya, J.; Alonso, F.; Montoro, L. Socioeconomic status, health and lifestyle settings as psychosocial risk factors for road crashes in young people: Assessing the Colombian case. Int. J. Environ. Res. Public Health 2021, 18, 886. [Google Scholar] [CrossRef]
- Han, I. Car Speed Estimation Based on Cross-Ratio Using Video Data of Car-Mounted Camera (Black Box). Forensic Sci. Int. 2016, 269, 89–96. [Google Scholar] [CrossRef]
- Vangi, D.; Cialdai, C.; Gulino, M.S. Vehicle Stiffness Assessment for Energy Loss Evaluation in Vehicle Impacts. Forensic Sci. Int. 2019, 300, 136–144. [Google Scholar] [CrossRef] [PubMed]
- Costa, L.R.; Rauen, M.S.; Fronza, A.B. Car Speed Estimation Based on Image Scale Factor. Forensic Sci. Int. 2020, 310, 110229. [Google Scholar] [CrossRef] [PubMed]
- Vervisch, T.; Christiaens, Y.; Detand, J. The design of a composite folding bike to improve the user experience of commuters. In MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2018; Volume 167, p. 01001. [Google Scholar]
- Doria, A.; Tognazzo, M. The Influence of the Dynamic Response of the Rider’s Body on the Open-Loop Stability of a Bicycle. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2014, 228, 3116–3132. [Google Scholar] [CrossRef]
- Sharp, R.S. Optimal Stabilization and Path-Following Controls for a Bicycle. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2007, 221, 415–427. [Google Scholar] [CrossRef]
- Gulino, M.S.; Gangi, L.D.; Sortino, A.; Vangi, D. Injury risk assessment based on pre-crash variables: The role of closing velocity and impact eccentricity. Accid. Anal. Prev. 2021, 150, 105864. [Google Scholar] [CrossRef]
- Langford, B.C.; Chen, J.; Cherry, C.R. Risky Riding: Naturalistic Methods Comparing Safety Behavior from Conventional Bicycle Riders and Electric Bike Riders. Accid. Anal. Prev. 2015, 82, 220–226. [Google Scholar] [CrossRef]
- Schleinitz, K.; Petzoldt, T.; Franke-Bartholdt, L.; Krems, J.; Gehlert, T. The German Naturalistic Cycling Study—Comparing Cycling Speed of Riders of Different e-Bikes and Conventional Bicycles. Saf. Sci. 2017, 92, 290–297. [Google Scholar] [CrossRef]
- Todd, J.; Krauss, D.; Zimmermann, J.; Dunning, A. Behavior of Electric Scooter Operators in Naturalistic Environments. In Proceedings of the WCX SAE World Congress Experience, Detroit, MI, USA, 9–11 April 2019. No. 2019-01-1007. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | p-Value | ||||
|---|---|---|---|---|---|
| Gender | Nmax | N | A | Srev | |
| t | 0.00 | 0.00 | 0.23 * | 0.00 | 0.08 * |
| Vmax | 0.90 * | 0.21 * | 0.13 * | 0.00 | 0.10 * |
| s | 0.35 * | 0.50 * | 0.73 * | 0.00 | 0.73 * |
| aave | 0.00 | 0.00 | 0.01 | 0.00 | 0.00 |
| V2m | 0.01 | 0.00 | 0.01 | 0.00 | 0.00 |
| V4m | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| V6m | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| V8m | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| V10m | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| V12m | 0.00 | 0.00 | 0.16 * | 0.00 | 0.06 * |
| a2m | 0.02 | 0.00 | 0.35 * | 0.00 | 0.03 |
| a4m | 0.00 | 0.00 | 0.01 | 0.00 | 0.00 |
| a6m | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| a8m | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| a10m | 0.00 | 0.00 | 0.01 | 0.00 | 0.00 |
| a12m | 0.00 | 0.00 | 0.05 | 0.00 | 0.01 |
| Parameter | Gender | Nmax | N | A | Srev | R2 | |
|---|---|---|---|---|---|---|---|
| C0 (Woman) | C0 (Man) | C1 | C2 | C3 | C4 | ||
| t(s) | 5.53 | 5.10 | −0.40 | −0.57 | −0.23 | 1.01 | 30.6% ** |
| Vmax (m/s) | 6.37 | 6.40 | 0.23 | 1.16 | 0.24 | −1.51 | 7.3% ** |
| s (m) | 13.60 | 13.86 | 0.15 | 0.30 | 0.24 | −0.38 | 3.5% ** |
| aave (m/s2) | 0.90 | 0.96 | 0.07 | 0.18 | 0.07 | −0.27 | 57.7% * |
| V2m (m/s) | 2.27 | 2.34 | 0.18 | 0.22 | 0.05 | −0.44 | 67.8% |
| V4m (m/s) | 3.23 | 3.40 | 0.27 | 0.51 | 0.12 | −0.81 | 71.6% |
| V6m (m/s) | 3.63 | 3.83 | 0.29 | 0.57 | 0.18 | −0.88 | 72.7% |
| V8m (m/s) | 3.60 | 3.86 | 0.25 | 0.52 | 0.22 | −0.79 | 73.3% |
| V10m (m/s) | 3.44 | 3.74 | 0.22 | 0.43 | 0.27 | −0.65 | 73.1% |
| V12m (m/s) | 3.12 | 3.46 | 0.19 | 0.29 | 0.31 | −0.47 | 68.2% |
| a2m (m/s2) | 1.10 | 1.16 | 0.12 | 0.08 | 0.03 | −0.22 | 53.4% * |
| a4m (m/s2) | 1.16 | 1.25 | 0.13 | 0.19 | 0.06 | −0.35 | 62.9% |
| a6m (m/s2) | 1.06 | 1.15 | 0.12 | 0.19 | 0.07 | −0.34 | 67.0% |
| a8m (m/s2) | 0.93 | 1.02 | 0.11 | 0.18 | 0.08 | −0.30 | 69.3% |
| a10m (m/s2) | 0.80 | 0.89 | 0.09 | 0.15 | 0.08 | −0.25 | 70.7% |
| a12m (m/s2) | 0.66 | 0.76 | 0.08 | 0.12 | 0.08 | −0.20 | 68.8% |
| Road without Right of Way—Section 1 | ||||
|---|---|---|---|---|
| Assistance | Vave | Variation Vave | VM | Variation VM |
| Yes | 17.2 | 19% | 24.7 | 8% |
| No | 14.0 | 22.8 | ||
| Road with Right of Way—Section 2 | ||||
| Assistance | Vave | Variation Vave | VM | Variation VM |
| Yes | 22.2 | 22% | 27.4 | 7% |
| No | 17.3 | 25.4 | ||
| Double Roundabout—Section 3 | ||||
| Assistance | Vave | Variation Vave | VM | Variation VM |
| Yes | 19.7 | 36% | 25.1 | 31% |
| No | 12.6 | 17.3 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gulino, M.-S.; Zonfrillo, G.; Damaziak, K.; Vangi, D. Exploring Performances of Electric Micro-Mobility Vehicles and Behavioural Patterns of Riders for In-Depth Accident Analysis. Designs 2021, 5, 66. https://0-doi-org.brum.beds.ac.uk/10.3390/designs5040066
Gulino M-S, Zonfrillo G, Damaziak K, Vangi D. Exploring Performances of Electric Micro-Mobility Vehicles and Behavioural Patterns of Riders for In-Depth Accident Analysis. Designs. 2021; 5(4):66. https://0-doi-org.brum.beds.ac.uk/10.3390/designs5040066
Chicago/Turabian StyleGulino, Michelangelo-Santo, Giovanni Zonfrillo, Krzysztof Damaziak, and Dario Vangi. 2021. "Exploring Performances of Electric Micro-Mobility Vehicles and Behavioural Patterns of Riders for In-Depth Accident Analysis" Designs 5, no. 4: 66. https://0-doi-org.brum.beds.ac.uk/10.3390/designs5040066