As mentioned in the introduction section of the manuscript, different traffic simulation models have been widely used for the evaluation of transportation networks. There are many advantages of using traffic simulation; however, there exist some drawbacks associated with traffic simulation as well. The highway capacity manual of the Transportation Research Board [
12] provides a detailed discussion of the traffic simulation advantages and disadvantages. The advantages of using traffic simulation include the following [
12]: (1) simulated methods are appropriate where analytical studies cannot be administered; (2) simulation models allow comprehensive understanding of the transportation network parameters and their relative interactions; (3) simulation models provide the outputs that can be used for the statistical analysis of the spatial and temporal data; (4) simulation models can be used to evaluate and compare the status of network options; (5) simulation models can be used to analyze modifications in the network efficiency; and (6) simulation models consider the distinctive demands of the network parameters.
2.1. Detailed Review of the Collected Studies
Many previous research efforts have aimed to compare different microsimulation models. For example, Bloomberg and Dale [
13] focused on the comparison of the VISSIM and CORSIM microsimulation models in terms of the network coding structure, car-following logic, gap acceptance model, and other attributes. The analysis results indicated that the differences among the considered microsimulation models were minimal, and the selection of the appropriate microsimulation model was primarily affected by the user needs and project requirements. Furthermore, it was found that CORSIM generally provided greater travel time as compared to VISSIM. Shaw and Nam [
14] performed a comparative analysis of the VISSIM, PARAMICS, and CORSIM microsimulation models for the Southeast Wisconsin freeway system. The microsimulation models were compared based on the following aspects: (1) model capabilities; (2) ease of use; and (3) freeway system operational assessment application requirements. As a result of a detailed analysis, PARAMICS was found to be the most appropriate microsimulation model.
Tian et al. [
15] studied the differences between the VISSIM, SimTraffic, and CORSIM microsimulation models. Based on the conducted numerical experiments, CORSIM produced the lowest variations in vehicle delays and throughput flow rates, while SimTraffic returned the highest variations. Moreover, it was noticed that higher variations were generally recorded for the scenarios where the capacity conditions were reached. Jones et al. [
16] performed a comprehensive comparative analysis of the AIMSUN, SimTraffic, and CORSIM microsimulation models based on different criteria (i.e., software requirements, ease of network coding, data requirements, appropriateness of the default parameter values, etc.). SimTraffic was reported to have the most user-friendly interface, while CORSIM was more efficient for modeling complex transportation networks. Furthermore, the study recommended that the microsimulation model selection should be based on the user needs and project requirements/expectations. In some cases, the synthesis of microsimulation models might be encouraged.
Fang and Elefteriadou [
17] assessed the performance of the CORSIM, VISSIM, and AIMSUN microsimulation models for two interchanges in Arizona. The following factors were identified to be the most critical ones in the selection of the appropriate microsimulation model: (1) capability of representation of certain geometric characteristics; (2) capability of emulating certain signal control plans; (3) calibration process and comparison against the field conditions; and (4) extraction of certain performance indicators. Xiao et al. [
18] proposed a comprehensive approach for the identification of the appropriate microsimulation model using quantitative and qualitative criteria. The quantitative evaluation criteria included calibration testing, while the qualitative evaluation criteria consisted of functional capabilities, service quality, input/output features, and ease of use. A case study was conducted for the AIMSUN and VISSIM microsimulation models. It was found that preferences to use a specific microsimulation model were primarily determined by the type of user. Shariat and Babaie [
19] compared the car-following models adopted within the VISSIM and AIMSUN microsimulation models. Although the Gipps car-following model (used in AIMSUN) was simpler and generally emulated the traffic flow faster, the Whiteman–Ritter car-following model (used in VISSIM) was found to be more logical and typically yielded more accurate results.
Shariat [
5] focused on the calibration of the AIMSUN, VISSIM, and SimTraffic microsimulation models for the Tehran metropolitan area. It was found that AIMSUN was superior to VISSIM and SimTraffic in terms of knowledge management, user-friendliness, software cost, and current application by various organizations in Iran. Pourreza et al. [
20] evaluated the performance of CORSIM, AIMSUN, INTEGRATION, PARAMICS, and VISSIM for the analysis of transportation networks. The following aspects were considered: (1) expected application of the model; (2) model capabilities; (3) previous software implementation; (4) software support; (5) software costs; and (6) user-friendliness, graphics, and interface. CORSIM was found to be the most advantageous microsimulation model based on the considered performance indicators. Da Rocha et al. [
21] conducted a study aiming to assess the accuracy of traffic microsimulation models in estimating fuel consumption and emissions. The researchers examined the Gipps and Newell car-following models. It was found that the Gipps car-following model demonstrated higher accuracy in terms of the simulated vehicle trajectories. The analysis results showed that the selection of the non-optimal parameters substantially increased the variance of the model outputs.
Ibrahim and Far [
22] undertook a simulation-based analysis to determine potential benefits from the implementation of pattern recognition in intelligent transportation systems. The AIMSUN microsimulation model was developed using real-life operational data. The numerical experiments demonstrated that AIMSUN was able to reduce the travel time by ~5–30%, while the congestion duration was decreased by ~8–41%. Praticò et al. [
23] performed a study aiming to assess the accuracy in estimating vehicle travel speed on roundabouts. The VISSIM microsimulation model was used to emulate the traffic flow. The computational experiments showed that the proposed microsimulation model could provide accurate travel speed estimates if the microsimulation model parameters were carefully calibrated. Shaaban and Kim [
24] focused on modeling two-lane and three-lane roundabouts in the VISSIM and SimTraffic environments. The microsimulation models were compared in terms of the estimated traffic delay values. It was found that, for the high-traffic flow scenarios, VISSIM provided higher delay values as compared to SimTraffic. However, no significant differences between the delay values were observed for the low-traffic flow scenarios.
Essa and Sayed [
25] performed a comparative analysis of the PARAMICS and VISSIM microsimulation models. The numerical experiments showed that the default model parameters gave poor correlation with the field-measured data. Furthermore, it was found that both microsimulation models could not estimate traffic conflicts accurately without proper calibration. However, a good correlation between the field-measured conflicts and the simulated conflicts was achieved after calibration for both PARAMICS and VISSIM models. Astarita et al. [
26] aimed to assess intersection safety by means of different traffic simulation models. The following types of intersections were considered: (1) a roundabout; (2) an intersection regulated with a traffic light; and (3) an unregulated intersection. AIMSUN, VISSIM, and different versions of Tritone were used for simulating the intersection traffic flows. The experiments showed some variations in the simulation outputs. However, the roundabout intersection generally had the largest number of conflicts. Kan et al. [
27] studied freeway corridors that had dedicated lanes and periodically experienced congestion. Two driving behavior models were proposed and implemented in AIMSUN and MOTUS. The experiments demonstrated the high accuracy of the developed models and provided some insights into driver behavior on freeways.
Shaaban et al. [
28] aimed to evaluate potential impacts from converting roundabouts into traffic signals at one of the urban arterial corridors in Qatar. A microscopic simulation approach based on VISSIM and MOVES (module for estimating emissions) was developed in the study. It was found that the replacement of roundabouts with traffic signals could reduce emissions by 37%−43%. Granà et al. [
29] used AIMSUN to determine passenger car equivalent units for two-lane and turbo roundabouts. The results showed that the operational performance of roundabouts could be significantly affected by the percentage of heavy vehicles. Kim et al. [
30] proposed a systematic guideline that could be used for calibrating reliable microscale estimates of vehicle emissions. The VISSIM environment was used to simulate the traffic flow. The proposed methodology demonstrated its effectiveness based on the available traffic data.
Song et al. [
31] investigated the accuracy of TransModeler and VISSIM for the estimation of nontraffic performance indicators, including emissions, fuel consumption, and safety. The experiments showed that, even after calibration, both microsimulation models had significant errors when comparing to the actual values. Van Beinum et al. [
32] examined the VISSIM and MOTUS traffic simulation models in their ability to emulate merging situations in high-traffic scenarios. It was found that the considered simulation packages were not able to accurately emulate turbulent traffic flows in terms of the headway distribution and lane-changing locations. However, the emulated gap acceptance distributions seemed to be appropriate.
A number of studies conducted a detailed review of different traffic simulation models. For example, Pell et al. [
7] conducted a detailed analysis of 17 simulation packages, mostly focusing on the adaptability of simulation models to heterogeneous traffic and roadways networks. It was found that many software packages still have a significant number of drawbacks in modeling capabilities. Azlan and Rohani [
8] provided a comprehensive overview of microscopic, mesoscopic, and macroscopic traffic simulation models. The models were overviewed in terms of their main purpose and the key parameters used. The study highlighted that the selection of the appropriate traffic simulation software is directly interrelated with the project needs. Gora et al. [
9] studied the existing literature on the applications of microscopic traffic simulation for modeling connected and autonomous vehicles. A large variety of different traffic modeling approaches were discussed, including car-following models (e.g., Gipps model, Wiedemann model, Nagel–Schreckenberg model, intelligent driver model), lane-changing models, and software packages (e.g., VISSIM, SUMO).
2.2. Literature Summary and Contribution
A summary of the conducted literature review is presented in
Table 1, including the following data: (a) author(s); (b) year; (c) software used; and (d) key findings and important notes. A review of the literature indicates that different microsimulation models have been widely used by researchers in the past. The selection of the appropriate microsimulation software package is generally dependent on a number of factors, which may include, but are not limited to [
5,
14,
16,
17,
20]: (1) software capabilities; (2) ease of use; (3) user interface/graphics; (4) software cost; (5) hardware/software requirements; (6) capability of emulating certain operations features; (7) previous software implementation; (8) accuracy in estimating various transportation network performance indicators (e.g., travel speed, travel time, vehicle delay, vehicle flow, and others); (8) user needs; (9) objectives of the project; and others. This study extends the work conducted by Shariat [
5] and Shariat and Babaie [
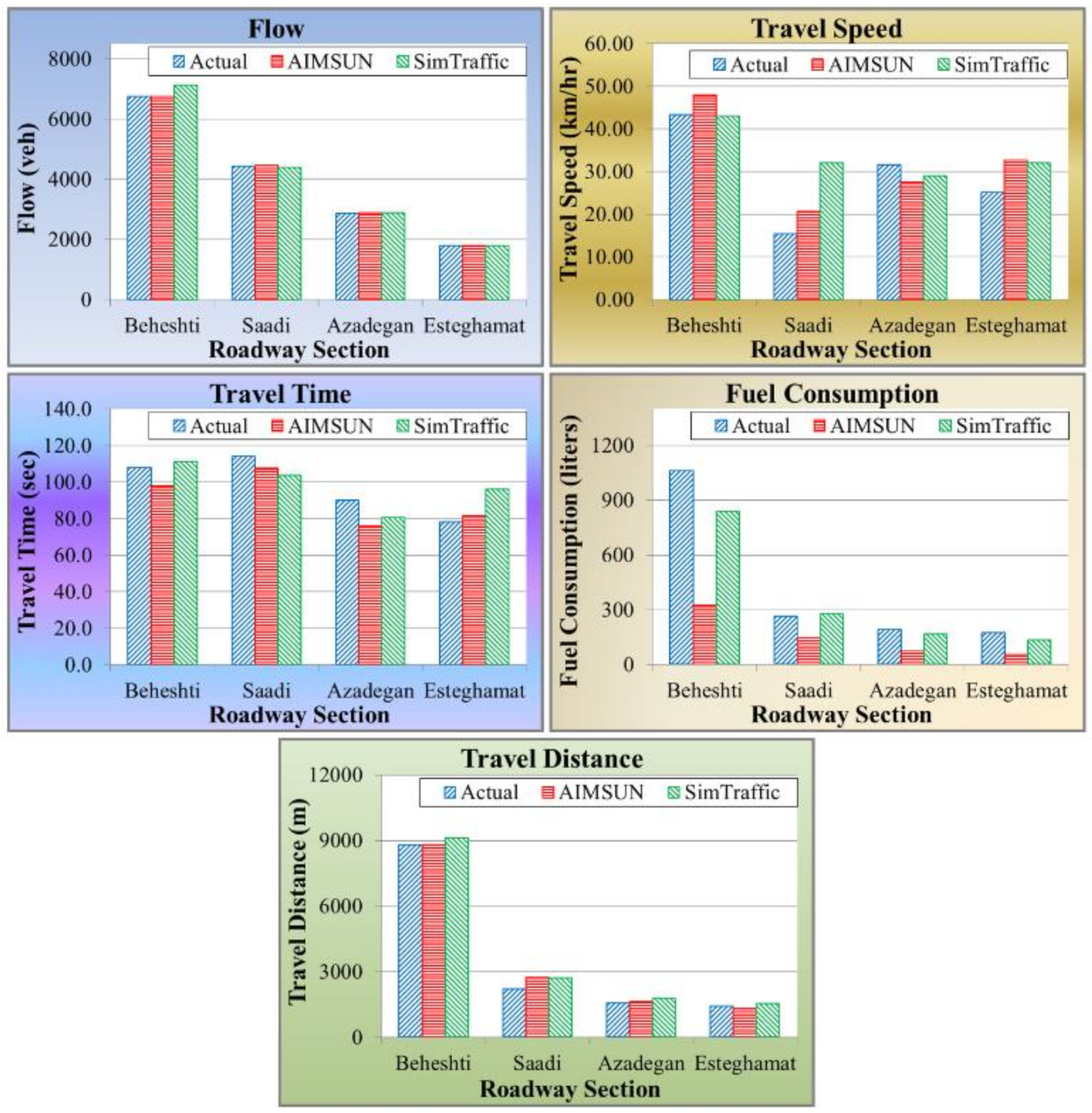
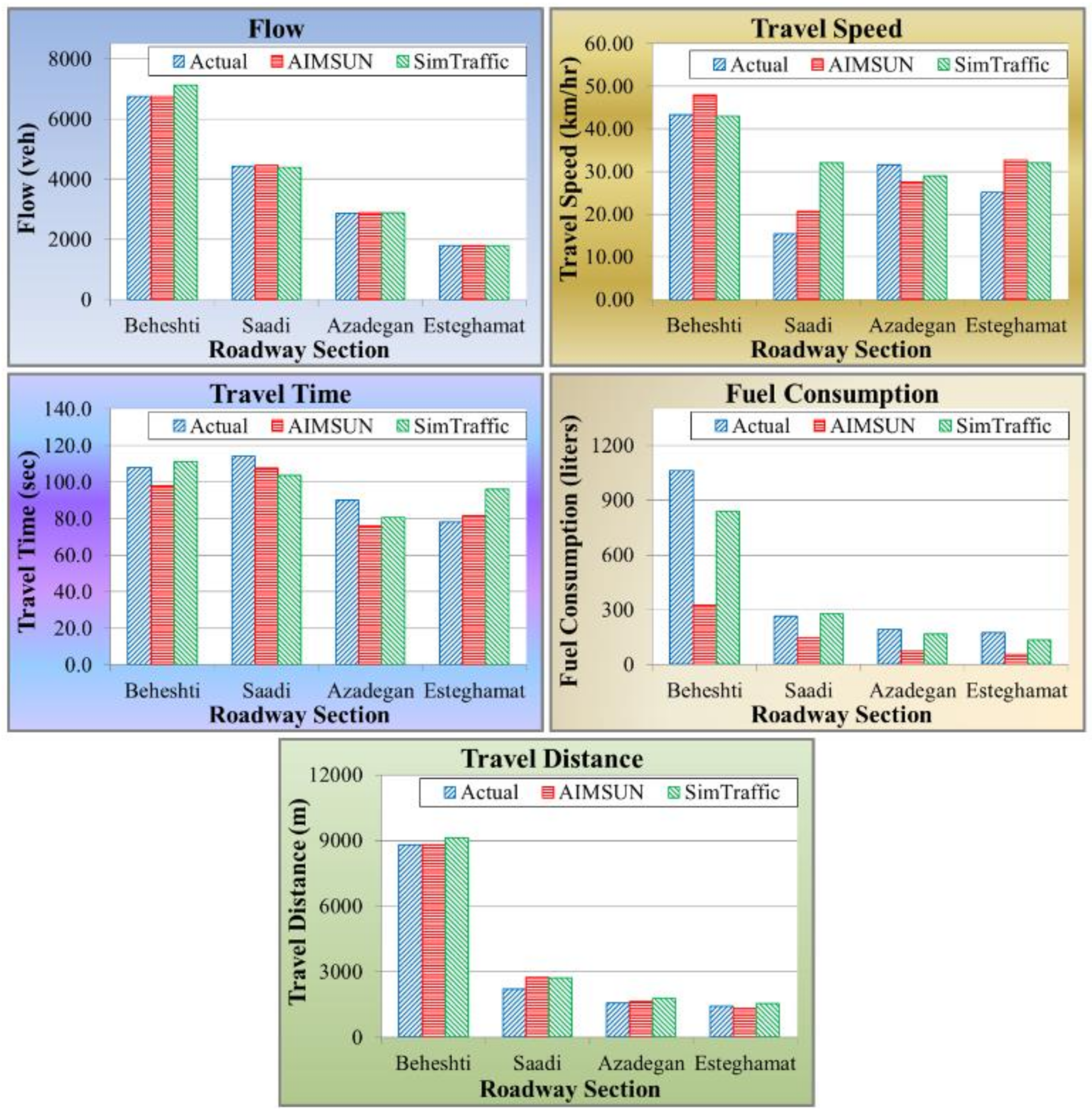
19] and focuses on the selection of the appropriate microsimulation software package for modeling the traffic movements in the northern part of Iran. The AIMSUN and SimTraffic microsimulation models are evaluated for the roadway sections with different functional classifications in terms of various performance indicators, including travel time, travel speed, vehicle flow, fuel consumption, and total travel distance.
AIMSUN and SimTraffic have been widely used for the analysis of the transportation networks in Iran [
5,
10,
11], and such a tendency can be explained by several reasons. First, both AIMSUN and SimTraffic are user-friendly in simulating traffic flow as compared to other microsimulation software packages (e.g., VISSIM). Second, AIMSUN and SimTraffic are quite popular microsimulation software packages and have been adopted by many consulting companies in Iran. Third, the cost of AIMSUN and SimTraffic is more affordable as compared to other microsimulation software packages (e.g., VISSIM). Fourth, the calibration process for AIMSUN and SimTraffic is less complicated when comparing to other microsimulation software packages. Last, but not least, AIMSUN and SimTraffic were found to be efficient in terms of replicating typical traffic conditions in Iran [
5]. Findings from the present study are expected to provide more insights regarding the performance of AIMSUN and SimTraffic in terms of the modeling accuracy of the traffic movements in the northern part of Iran. These insights will be valuable for transportation planners and will assist with the selection of the appropriate microsimulation model for the analysis of the transportation networks in Iran.







{kind=link}
{kind=link}
{kind=link}
{kind=link}