
Supporting User Onboarding in Automated Vehicles through Multimodal Augmented Reality Tutorials



Abstract
:1. Introduction
Contribution Statement
2. Background & Related Work
2.1. Defining User Onboarding in Context of Automated Vehicles
2.2. Effects of User Onboarding on Experience with Automated Vehicles
Multimodal User Onboarding in Augmented Reality
2.3. Conclusive Summary
3. Online Survey on Users’ Experience with Current Vehicle Assistant Systems
3.1. Sample
3.2. Method and Procedure
3.3. Results & Discussion
4. Real-World Driving Study to Compare User Onboarding Mechanisms
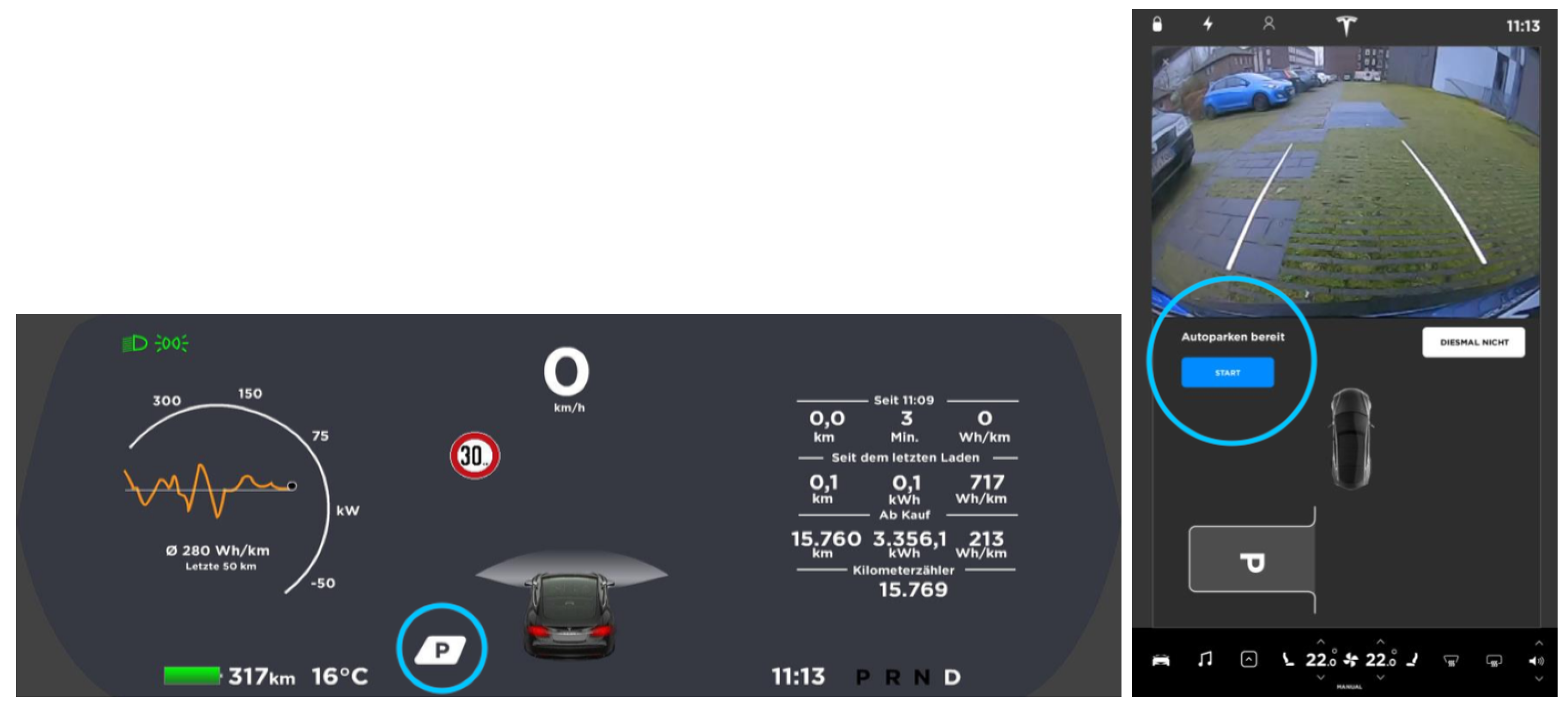
4.1. Stimulus Material: AR User Onboarding Prototype vs. Manual for Autoparking
- 1.
- Slowly pass through the parking space until a “P” appears in the instrument cluster
- 2.
- Stop the vehicle
- 3.
- Engage reverse gear
- 4.
- On center screen, press button “Start”
4.2. Experimental Procedure
4.2.1. Pre-Questionnaire
4.2.2. Driving Test
Station I
Station II
Station III
4.2.3. Post-Questionnaire
4.3. Sample
4.4. Results of the Driving Study
4.4.1. Observed Behavior
Mistrust: Interruption of the Automated System Behavior
Task Performance: Completing the Autoparking Procedure without further Help
4.4.2. Subjective Questionnaires
5. General Discussion
5.1. User Acceptance and UX of Vehicle Assistant Systems
5.2. Trust in and Familiarization with Vehicle Assistant Systems
Vehicle Assistant Systems’ Understanding and Operation
6. Limitations
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hoff, K.A.; Bashir, M. Trust in automation: Integrating empirical evidence on factors that influence trust. Hum. Factors 2015, 57, 407–434. [Google Scholar] [CrossRef]
- Bauer, T.N.; Erdogan, B. Organizational socialization: The effective onboarding of new employees. In Maintaining, Expanding, and Contracting the Organization; Zedeck, S., Ed.; Handbooks in Psychology; American Psychological Assoc: Washington, DC, USA, 2011; pp. 51–64. [Google Scholar] [CrossRef]
- Crumlish, C.; Malone, E. Designing Social Interfaces: Principles, Patterns, and Practices for Improving the User Experience; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2009. [Google Scholar]
- Singer, J. Onboarding: The First, Best Chance to make a Repeat Customer. Retrieved Novemb. 2011, 3, 2015. [Google Scholar]
- Renz, J.; Staubitz, T.; Pollack, J.; Meinel, C. Improving the Onboarding User Experience in MOOCs. In Proceedings of the 6th International Conference on Education and New Learning Technologies (EDULEARN2014), Barcelona, Spain, 7–9 July 2014; pp. 3931–3941. [Google Scholar]
- Hulick, S. The Elements of User Onboarding—The Official Primer from UserOnboard.com. Retrieved Novemb. 2020, 3, 2014. [Google Scholar]
- Balboni, K. We categorized over 500 user onboarding experiences into 8 UI/UX patterns. Retrieved Novemb. 2020, 3, 2016. [Google Scholar]
- Dixon, L. Autonowashing: The Greenwashing of Vehicle Automation. Transp. Res. Interdiscip. Perspect. 2019, 5, 100113. [Google Scholar] [CrossRef]
- Gaspar, J.G.; Carney, C.; Shull, E.; Horrey, W.J. The Impact of Driver’s Mental Models of Advanced Vehicle Technologies on Safety and Performance. Retrieved Novemb. 2020, 3, 2020. [Google Scholar]
- Hergeth, S.; Lorenz, L.; Krems, J.F. Prior Familiarization With Takeover Requests Affects Drivers’ Takeover Performance and Automation Trust. Hum. Factors 2017, 59, 457–470. [Google Scholar] [CrossRef]
- Larsson, A.F. Driver usage and understanding of adaptive cruise control. Appl. Ergon. 2012, 43, 501–506. [Google Scholar] [CrossRef]
- Beggiato, M.; Pereira, M.; Petzoldt, T.; Krems, J. Learning and development of trust, acceptance and the mental model of ACC. A longitudinal on-road study. Transp. Res. Part Traffic Psychol. Behav. 2015, 35, 75–84. [Google Scholar] [CrossRef]
- Dikmen, M.; Burns, C.M. Autonomous Driving in the Real World: Experiences with Tesla Autopilot and Summon. In Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Ann Arbor, MI, USA, 24–26 October 2016; Association for Computing Machinery: New York, NY, USA, 2016; pp. 225–228. [Google Scholar] [CrossRef]
- Dikmen, M.; Burns, C. Trust in autonomous vehicles: The case of Tesla Autopilot and Summon. In Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017; pp. 1093–1098. [Google Scholar]
- Detjen, H.; Faltaous, S.; Pfleging, B.; Geisler, S.; Schneegass, S. How to Increase Automated Vehicles’ Acceptance through In-Vehicle Interaction Design: A Review. Int. J. Hum. Comput. Interact. 2021, 37, 308–330. [Google Scholar] [CrossRef]
- Tenhundfeld, N.L.; de Visser, E.J.; Ries, A.J.; Finomore, V.S.; Tossell, C.C. Trust and Distrust of Automated Parking in a Tesla Model X. Hum. Factors 2020, 62, 194–210. [Google Scholar] [CrossRef]
- Kraus, J.; Scholz, D.; Stiegemeier, D.; Baumann, M. The More You Know: Trust Dynamics and Calibration in Highly Automated Driving and the Effects of Take-Overs, System Malfunction, and System Transparency. Hum. Factors 2020, 62, 718–736. [Google Scholar] [CrossRef] [PubMed]
- Beggiato, M.; Krems, J.F. The evolution of mental model, trust and acceptance of adaptive cruise control in relation to initial information. Transp. Res. Part F Traffic Psychol. Behav. 2013, 18, 47–57. [Google Scholar] [CrossRef]
- Körber, M.; Baseler, E.; Bengler, K. Introduction matters: Manipulating trust in automation and reliance in automated driving. Appl. Ergon. 2018, 66, 18–31. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mayer, R.E. Cognitive theory of multimedia learning. Camb. Handb. Multimed. Learn. 2005, 41, 31–48. [Google Scholar]
- Paivio, A.; Clark, J. Dual coding theory and education. In Proceedings of the Draft Chapter Presented at the Conference on Pathways to Literacy Achievement for High Poverty Children at The University of Michigan School of Education, Ontario, CA, USA, 29 September–1 October 2006; pp. 1–20. [Google Scholar]
- Shelton, B.E. How Augmented Reality Helps Students Learn Dynamic Spatial Relationships; University of Washington: Seattle, WA, USA, 2003. [Google Scholar]
- Lee, K. Augmented Reality in Education and Training. TechTrends 2012. [Google Scholar] [CrossRef]
- Mehler-Bicher, A.; Steiger, L. Augmented Reality: Theorie und Praxis; De Gruyter Oldenbourg: The Hague, The Netherlands, 2014. [Google Scholar]
- Blattgerste, J.; Strenge, B.; Renner, P.; Pfeiffer, T.; Essig, K. Comparing Conventional and Augmented Reality Instructions for Manual Assembly Tasks. In Proceedings of the 10th International Conference on PErvasive Technologies Related to Assistive Environments, Rhodes, Greece, 21–23 June 2017; Association for Computing Machinery: New York, NY, USA, 2017; pp. 75–82. [Google Scholar] [CrossRef]
- Ebnali, M.; Lamb, R.; Fathi, R. Familiarization tours for first-time users of highly automated cars: Comparing the effects of virtual environments with different levels of interaction fidelity. arXiv 2020, arXiv:2002.07968. [Google Scholar]
- Ebnali, M.; Hulme, K.; Ebnali-Heidari, A.; Mazloumi, A. How does training effect users’ attitudes and skills needed for highly automated driving? Transp. Res. Part F Traffic Psychol. Behav. 2019, 66, 184–195. [Google Scholar] [CrossRef]
- Sportillo, D.; Paljic, A.; Ojeda, L. On-Road Evaluation of Autonomous Driving Training. In Proceedings of the 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, Korea, 11–14 March 2019; pp. 182–190. [Google Scholar] [CrossRef] [Green Version]
- Forster, Y.; Hergeth, S.; Naujoks, F.; Krems, J.; Keinath, A. User Education in Automated Driving: Owner’s Manual and Interactive Tutorial Support Mental Model Formation and Human-Automation Interaction. Information 2019, 10, 143. [Google Scholar] [CrossRef] [Green Version]
- Forster, Y.; Hergeth, S.; Naujoks, F.; Krems, J.F.; Keinath, A. What and how to tell beforehand: The effect of user education on understanding, interaction and satisfaction with driving automation. Transp. Res. Part F Traffic Psychol. Behav. 2020, 68, 316–335. [Google Scholar] [CrossRef]
- Franke, T.; Attig, C.; Wessel, D. A Personal Resource for Technology Interaction: Development and Validation of the Affinity for Technology Interaction (ATI) Scale. Int. J. Hum. Comput. Interact. 2019, 35, 456–467. [Google Scholar] [CrossRef]
- EUR-Lex. General Data Protection Regulation. Retrieved Novemb. 2011, 3, 2016. [Google Scholar]
- Detjen, H.; Pfleging, B.; Schneegass, S. A Wizard of Oz Field Study to Understand Non-Driving-Related Activities, Trust, and Acceptance of Automated Vehicles. In Proceedings of the 12th International Conference on Automotive User Interfaces and Interactive Vehicular Applications; Association for Computing Machinery: New York, NY, USA, 2020; pp. 19–29. [Google Scholar] [CrossRef]
- van Someren, M.W.; Barnard, Y.F.; Sandberg, J.A.C. The Think Aloud Method: A Practical Guide to Modelling Cognitive Processes; Academic Press: London, UK, 1994. [Google Scholar]
- Schrepp, M.; Hinderks, A.; Thomaschewski, J. Design and Evaluation of a Short Version of the User Experience Questionnaire (UEQ-S). Int. J. Interact. Multimed. Artif. Intell. 2017, 4, 103. [Google Scholar] [CrossRef] [Green Version]
- Davis, F.D. Perceived Usefulness, Perceived Ease of Use, and User Acceptance of Information Technology. MIS Q. 1989, 13, 319. [Google Scholar] [CrossRef] [Green Version]
- Jian, J.Y.; Bisantz, A.M.; Drury, C.G. Foundations for an Empirically Determined Scale of Trust in Automated Systems. Int. J. Cogn. Ergon. 2000, 4, 53–71. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ACC ∪ aLKA | aLCA | Traffic Jam Assistant | Remote Parking | Automated Parking | |
|---|---|---|---|---|---|
| Persons who own it | 44 (75) | 17 (29) | 27 (47) | 11 (19) | 45 (78) |
| Owners who use it... | |||||
| ...weekly | 37 (84) | 9 (53) | 17 (63) | 2 (18) | 16 (36) |
| ...monthly | 2 (4) | 3 (18) | 4 (15) | 1 (9) | 5 (11) |
| ...<monthly | 3 (6) | 5 (29) | 3 (11) | 5 (46) | 15 (33) |
| ...never | 2 (4) | 3 (11) | 3 (27) | 9 (20) | |
| Trust at first contact | 3.5 (1.17) | 3.47 (1.17) | 3.26 (1.25) | 3.64 (1.2) | 2.96 (1.6) |
| Trust today | 4.23 (0.83) | 4.41 (0.71) | 4 (1.14) | 4.36 (1.02) | 4.16 (1.1) |
| Training Needs | 29% | 29% | 25% | 36% | 28% |
| Incomprehensibility | 59% | 52% | 51% | 36% | 64% |
| Operation | 9% | 5% | 25% | 9% | 31% |
| System Understanding | 20% | 17% | 3% | 9% | 11% |
| System Boundaries | 46% | 47% | 33% | 36% | 33% |
| Experienced Misunderstandings | 7% | 0% | 8% | 0% | 7% |
| Hidden Functions | 0% | 0% | 0% | 0% | 0% |
| Experimental Condition | |||||||
|---|---|---|---|---|---|---|---|
| Manual | AR | ||||||
| Scale | Factor | M | SD | M | SD | t-Test | |
| Station I (Onboarding) | |||||||
| UEQ-S | Pragmatic Quality | 5.26 | 0.97 | 5.24 | 1.4 | ||
| Hedonic Quality * | 3.85 | 1.27 | 5.7 | 1.08 | |||
| Overall * | 4.5 | 1.05 | 5.47 | 1.05 | |||
| Station III (Autopark) | |||||||
| UEQ-S | Pragmatic Quality | 5.52 | 0.87 | 5.87 | 0.85 | ||
| Hedonic Quality | 5.9 | 0.89 | 6 | 1.03 | |||
| Overall | 5.71 | 0.74 | 5.94 | 0.69 | |||
| Trust Scale | Trust | 4.7 | 1.3 | 5.44 | 0.83 | ||
| Mistrust | 2.84 | 1.09 | 2.6 | 1.26 | |||
| TAM | Perceived Usefulness | 5.46 | 1.55 | 5.35 | 1.5 | ||
| Perceived Ease of Use | 5.89 | 0.98 | 6.02 | 1.01 | |||
| Attitude Toward Using | 5.86 | 1.07 | 6.01 | 1.21 | |||
| Behavorial Intention to Use | 3.38 | 1.1 | 3.65 | 1.02 | |||
| Quiz | Overall (max 6 points) | 3.69 | 1.31 | 3.61 | 0.86 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Detjen, H.; Degenhart, R.N.; Schneegass, S.; Geisler, S. Supporting User Onboarding in Automated Vehicles through Multimodal Augmented Reality Tutorials. Multimodal Technol. Interact. 2021, 5, 22. https://0-doi-org.brum.beds.ac.uk/10.3390/mti5050022
Detjen H, Degenhart RN, Schneegass S, Geisler S. Supporting User Onboarding in Automated Vehicles through Multimodal Augmented Reality Tutorials. Multimodal Technologies and Interaction. 2021; 5(5):22. https://0-doi-org.brum.beds.ac.uk/10.3390/mti5050022
Chicago/Turabian StyleDetjen, Henrik, Robert Niklas Degenhart, Stefan Schneegass, and Stefan Geisler. 2021. "Supporting User Onboarding in Automated Vehicles through Multimodal Augmented Reality Tutorials" Multimodal Technologies and Interaction 5, no. 5: 22. https://0-doi-org.brum.beds.ac.uk/10.3390/mti5050022