
Understanding the Headless Rider: Display-Based Awareness and Intent-Communication in Automated Vehicle-Pedestrian Interaction in Mixed Traffic


 ,
,  , and
, and
Abstract
:1. Introduction
2. Related Work
3. Project Context and Experimental Prototype
3.1. Project Context
3.2. Communicating Awareness and Intent
3.3. Design of Visual eHMI Prototypes
3.4. Functional backend Implementation of the Awareness and Intent Communication
4. Method
4.1. Study Participants
4.2. Experimental Design
4.2.1. Test Track and Procedure
4.2.2. Questionnaire
4.2.3. Semi-Structured Interview
5. Results
5.1. Sense of Safety and Trust in Communication
5.1.1. Quantitative Results
5.1.2. Qualitative Results
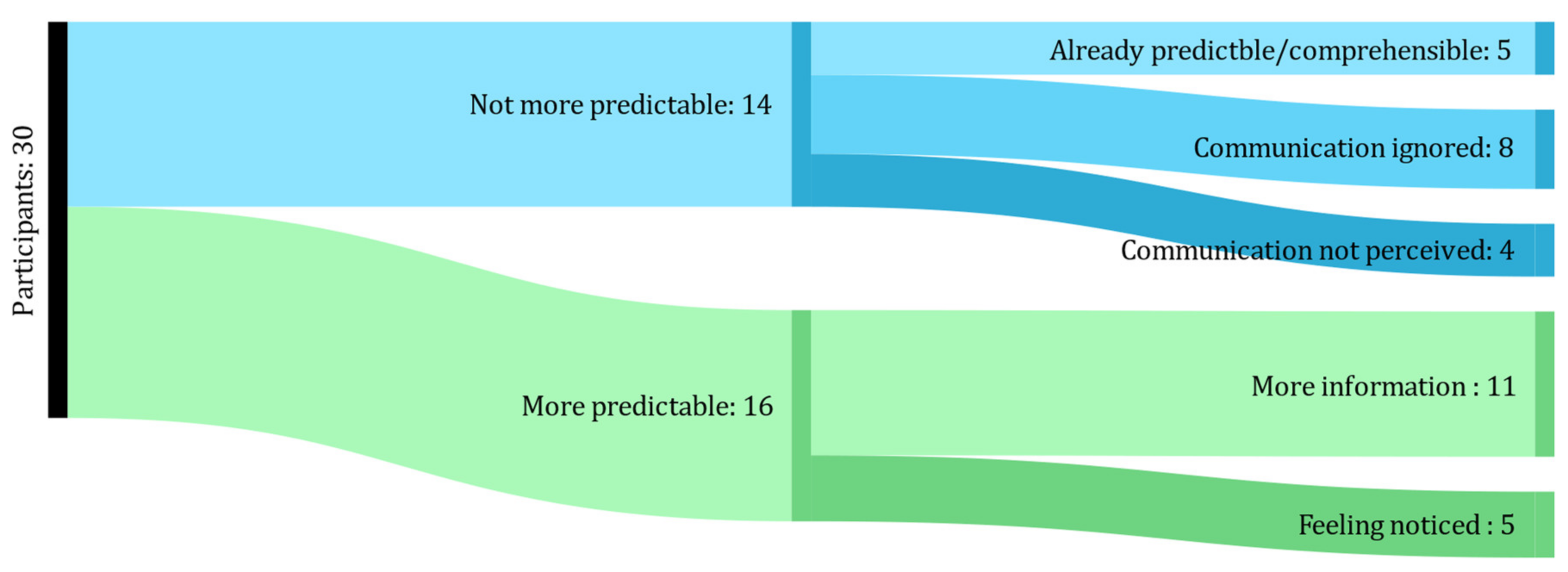
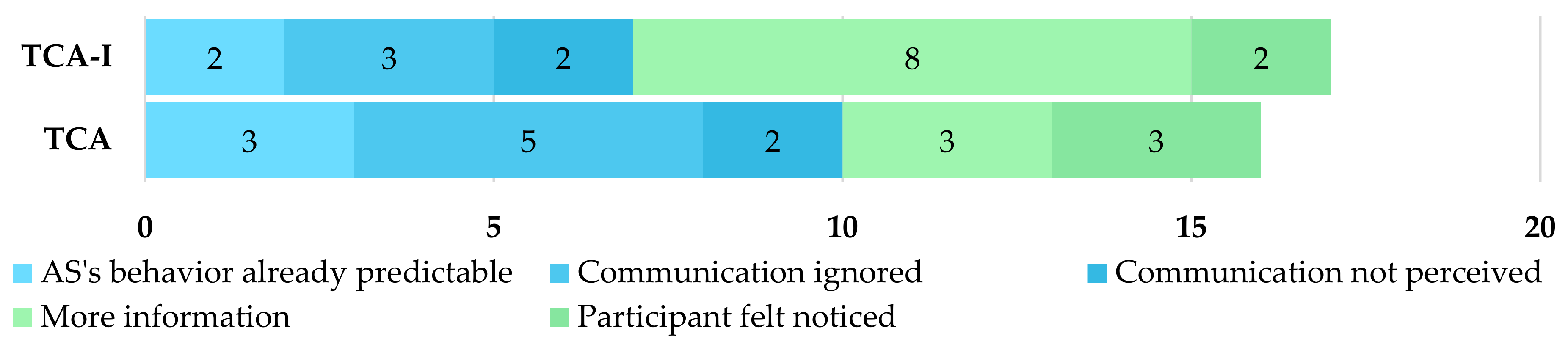
5.2. Comprehensibility and Predictability of the Shuttle’s Behavior
5.2.1. Quantitative Results
5.2.2. Qualitative Results
5.3. Further Impressions
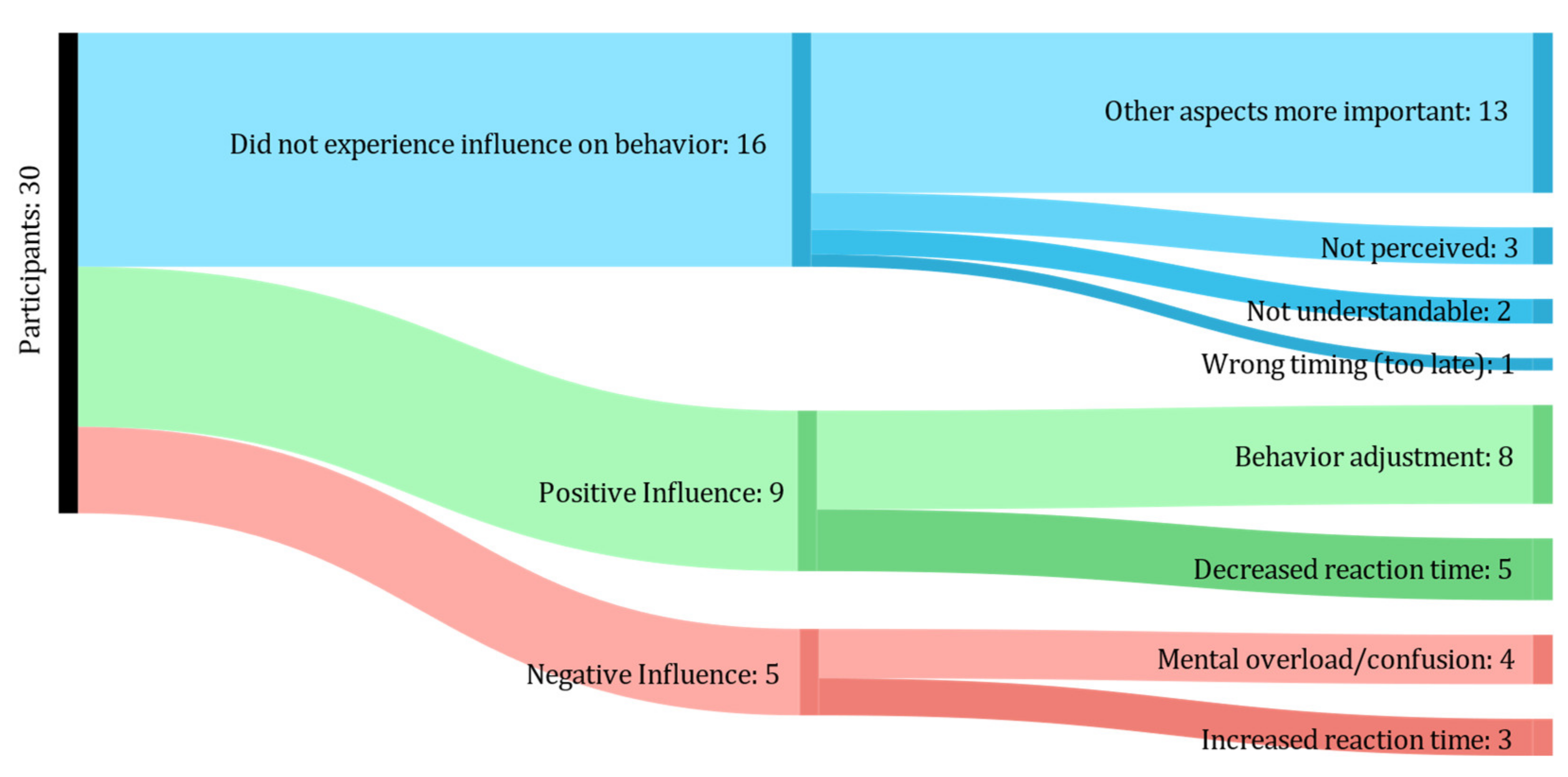
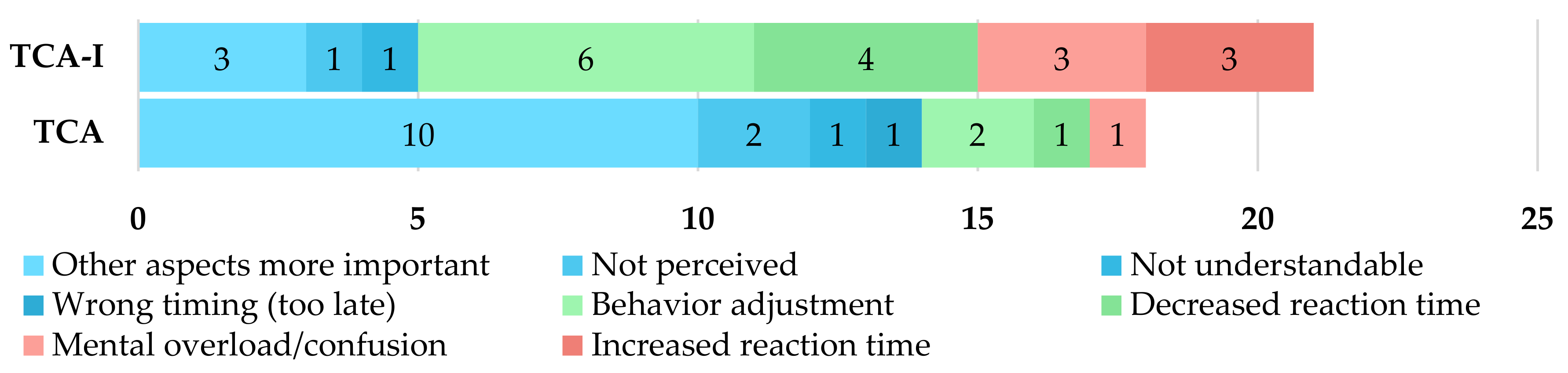
5.3.1. Perceived Behavior Change
5.3.2. Necessity and Influence of External Communication in Automated Vehicles
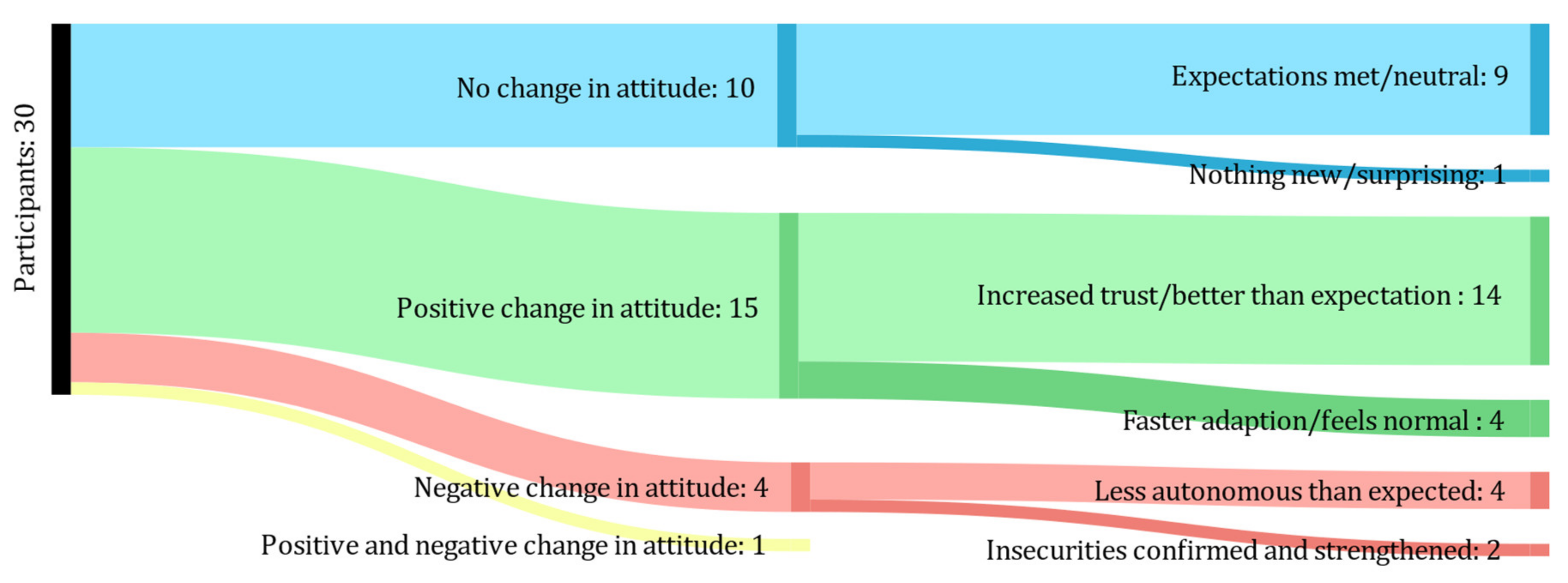
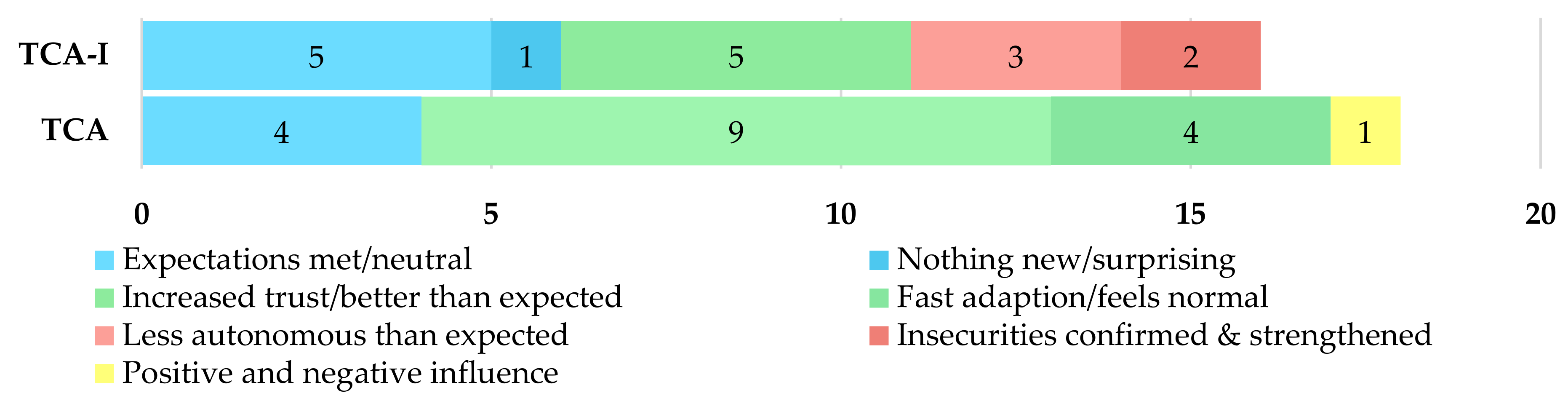
5.3.3. Attitude towards the Automated Shuttle and AVs in General
5.3.4. Content and Visibility
6. Discussion
6.1. Overall Effects of Visual Communication on Pedestrians in Real-World Mixed Traffic
6.2. Communication of Intent and External Awareness Communication
6.3. Design Implications for eHMIs
6.3.1. Ensure Both Legibility and Conspicuousness
6.3.2. Provide Consistency between Communication and Vehicle Behavior
7. Conclusions and Further Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Interview Data

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Participants | % | TCA | TCA-I | f | m | AG1 | AG2 | AG3 | |
|---|---|---|---|---|---|---|---|---|---|
| Did not experience influence on behavior | 16 | 53.33 | 12 | 5 | 7 | 10 | 7 | 5 | 5 |
| Other aspects more important | 13 | 43.33 | 10 | 3 | 4 | 9 | 6 | 4 | 3 |
| Not perceived | 3 | 10.00 | 2 | 1 | 2 | 1 | 1 | 0 | 2 |
| Not understandable | 2 | 6.66 | 1 | 1 | 1 | 1 | 0 | 1 | 1 |
| Wrong timing (too late) | 1 | 3.33 | 1 | 0 | 0 | 1 | 0 | 0 | 1 |
| Experienced influence on behavior | 14 | 46.66 | 3 | 10 | 9 | 4 | 8 | 4 | 1 |
| Positive influence: | 9 | 30 | 2 | 7 | 5 | 4 | 6 | 3 | 0 |
| Behavior adjustment | 8 | 26.66 | 2 | 6 | 4 | 4 | 5 | 3 | 0 |
| Decreased reaction time | 5 | 16.66 | 1 | 4 | 4 | 1 | 4 | 1 | 0 |
| negative influence | 5 | 16.66 | 1 | 4 | 5 | 0 | 3 | 1 | 1 |
| Mental overload/confusion | 4 | 13.33 | 1 | 3 | 4 | 0 | 2 | 1 | 1 |
| Increased reaction time | 3 | 10.00 | 0 | 3 | 3 | 0 | 1 | 1 | 1 |
| Analyzed Interviews | 30 | 100 | 15 | 15 | 17 | 13 | 15 | 9 | 6 |
| Participants | % | TCA | TCA-I | f | m | AG1 | AG2 | AG3 | |
|---|---|---|---|---|---|---|---|---|---|
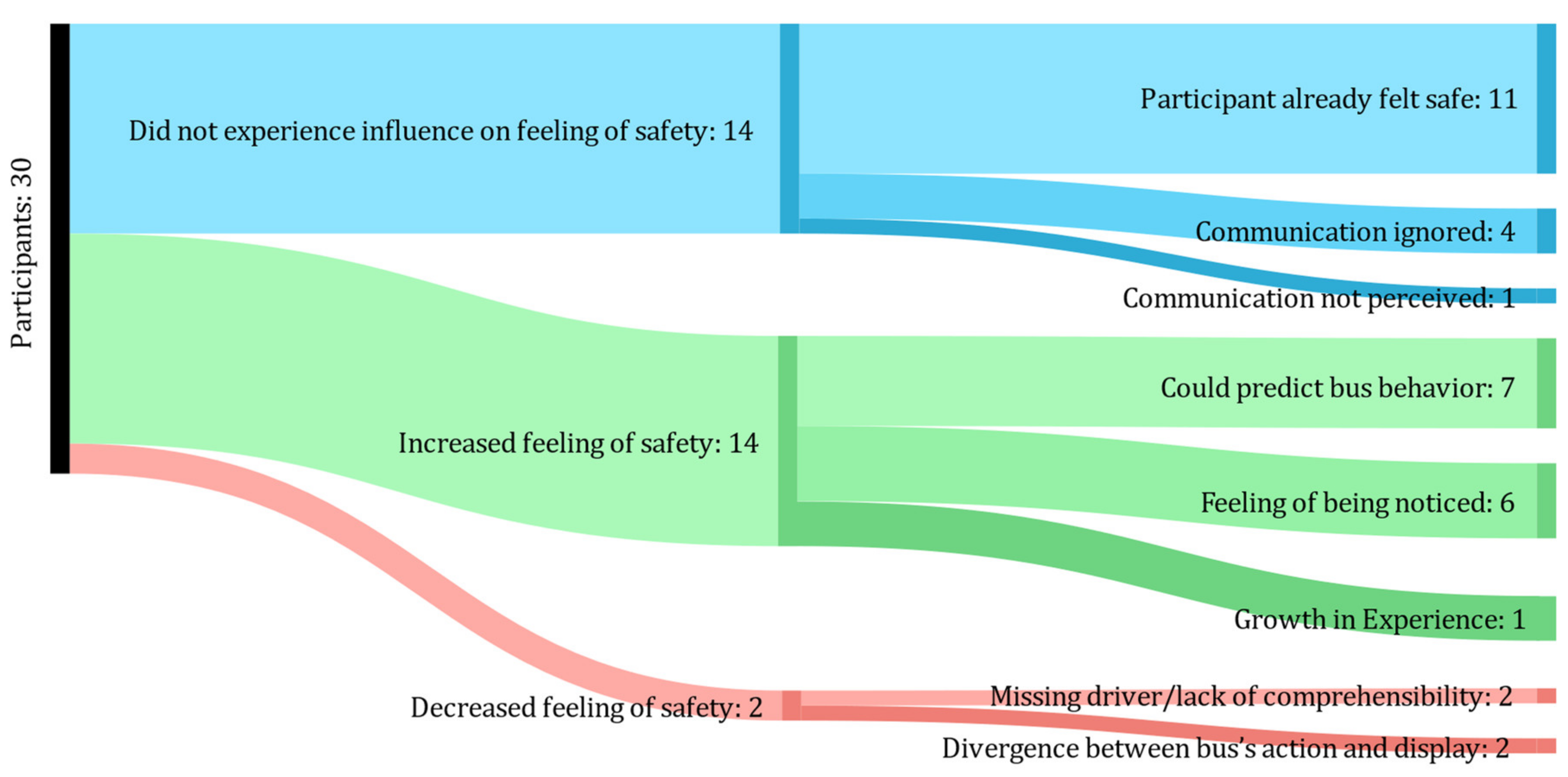
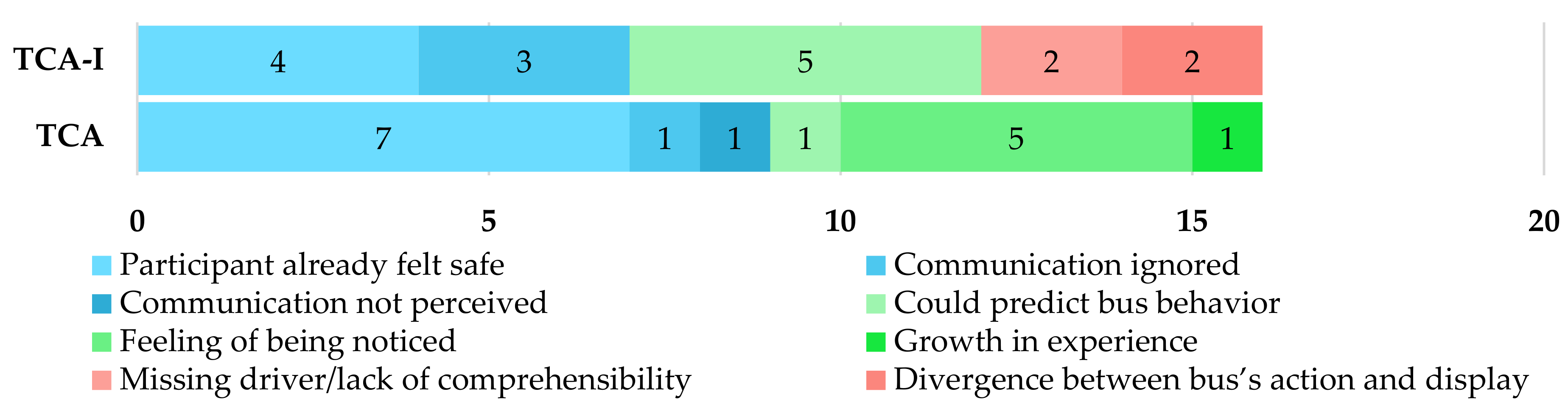
| Did not experience influence on feeling of safety | 14 | 46.66 | 9 | 7 | 9 | 7 | 6 | 5 | 5 |
| Participant already felt safe | 11 | 36.66 | 7 | 4 | 4 | 7 | 4 | 4 | 3 |
| Communication ignored | 4 | 13.33 | 1 | 3 | 4 | 0 | 1 | 1 | 2 |
| Communication not perceived | 1 | 3.33 | 1 | 0 | 1 | 0 | 1 | 0 | 0 |
| Experienced influence on feeling of safety | 14 | 46.66 | 6 | 8 | 7 | 7 | 9 | 4 | 1 |
| Increased feeling of safety: | 12 | 40 | 6 | 5 | 5 | 6 | 8 | 2 | 1 |
| Could predict bus behavior | 7 | 23.33 | 1 | 5 | 6 | 1 | 7 | 0 | 0 |
| Feeling of being noticed | 6 | 20 | 5 | 0 | 1 | 5 | 3 | 2 | 1 |
| Growth in Experience | 1 | 3.33 | 1 | 0 | 1 | 0 | 1 | 0 | 0 |
| Decreased feeling of safety: | 3 | 10 | 0 | 3 | 2 | 1 | 1 | 2 | 0 |
| Missing driver/lack of comprehensibility | 2 | 6.66 | 0 | 2 | 2 | 0 | 1 | 1 | 0 |
| Divergence between bus’s action and display | 2 | 6.66 | 0 | 2 | 1 | 1 | 1 | 1 | 0 |
| Influence on feeling of safety solely due to audio signal | 2 | 6.67 | 1 | 1 | 2 | 0 | 2 | 0 | 0 |
| Analyzed Interviews | 30 | 100 | 15 | 15 | 17 | 13 | 15 | 9 | 6 |
| Participants | % | TCA | TCA-I | f | m | AG1 | AG2 | AG3 | |
|---|---|---|---|---|---|---|---|---|---|
| Behavior of auto.Bus is not more comprehensible and predictable | 14 | 46.66 | 9 | 5 | 7 | 7 | 5 | 4 | 5 |
| already predictable/comprehensible | 5 | 16.66 | 3 | 2 | 3 | 2 | 2 | 3 | 0 |
| Communication ignored | 8 | 26.66 | 5 | 3 | 3 | 5 | 3 | 2 | 3 |
| Communication not perceived | 4 | 13.33 | 2 | 2 | 3 | 1 | 2 | 0 | 2 |
| Behavior of auto.Bus is more comprehensible/predictable | 16 | 53.33 | 6 | 10 | 10 | 6 | 10 | 5 | 1 |
| More information | 11 | 36.66 | 3 | 8 | 8 | 3 | 7 | 3 | 1 |
| Feeling noticed | 5 | 16.66 | 3 | 2 | 2 | 3 | 3 | 2 | 0 |
| Analyzed Interviews | 30 | 100 | 15 | 15 | 17 | 13 | 15 | 9 | 6 |
| Participants | % | TCA | TCA-I | f | m | AG1 | AG2 | AG3 | |
|---|---|---|---|---|---|---|---|---|---|
| Not necessary at all | 5 | 16.66 | 3 | 2 | 3 | 2 | 1 | 1 | 3 |
| No increase in information | 2 | 6.66 | 2 | 0 | 1 | 1 | 0 | 1 | 1 |
| Other aspects more important | 3 | 10.00 | 1 | 2 | 1 | 2 | 0 | 0 | 3 |
| Helpful, but not necessary | 8 | 26.66 | 4 | 4 | 5 | 3 | 3 | 4 | 1 |
| Disabled people | 1 | 3.33 | 1 | 0 | 0 | 1 | 0 | 1 | 0 |
| In the beginning | 2 | 6.66 | 1 | 1 | 1 | 1 | 0 | 1 | 1 |
| Increased safety | 4 | 13.33 | 2 | 2 | 2 | 2 | 3 | 1 | 0 |
| In exceptional cases | 1 | 3.33 | 0 | 1 | 1 | 0 | 0 | 1 | 0 |
| If design is improved | 1 | 3.33 | 1 | 0 | 1 | 0 | 0 | 1 | 0 |
| Necessary | 17 | 66.66 | 8 | 9 | 8 | 9 | 11 | 4 | 2 |
| Visual and audio | 6 | 20 | 4 | 2 | 3 | 3 | 4 | 2 | 0 |
| Visual only | 9 | 30 | 3 | 6 | 5 | 4 | 7 | 2 | 0 |
| Audio only | 2 | 6.66 | 1 | 1 | 0 | 2 | 0 | 0 | 2 |
| Reasons | |||||||||
| More information | 5 | 13.33 | 2 | 3 | 1 | 4 | 2 | 3 | 0 |
| Soundless electronic vehicle | 3 | 10 | 1 | 2 | 0 | 3 | 0 | 1 | 2 |
| In the beginning | 2 | 6.66 | 1 | 1 | 1 | 1 | 2 | 0 | 0 |
| Feeling of being noticed | 7 | 23.33 | 5 | 2 | 5 | 2 | 7 | 0 | 0 |
| Same necessity for all road user Different necessity for different types of road users. Most necessary for… Pedestrians Car drivers Bicyclists Car drivers and bicyclists Pedestrians and bicyclists Car drivers and pedestrians Criteria for communication to meet perceived necessity none Recognizability/conspicuity Comprehensibility Perceptible via different senses Uniformity Reliability Not disturbing | 13 14 6 1 1 3 2 1 20 4 8 7 3 1 1 1 | 43.33 46.66 20 3.33 3.33 10 6.66 3.33 66.66 13.33 26.66 23.33 10.00 3.33 3.33 3.33 | 8 6 2 0 1 1 2 0 9 1 4 4 1 0 1 1 | 5 8 4 1 0 2 0 1 11 3 4 3 2 1 0 0 | 5 10 4 1 0 3 2 0 11 3 4 3 2 0 1 0 | 8 4 2 0 1 0 0 1 9 1 4 4 1 1 0 1 | 7 7 1 1 1 2 2 0 12 3 5 3 2 1 1 1 | 3 5 3 0 0 1 0 1 7 0 3 4 1 0 0 0 | 3 2 2 0 0 0 0 0 1 1 0 0 0 0 0 0 |
| Analyzed Interviews | 30 | 100 | 15 | 15 | 17 | 13 | 15 | 9 | 6 |
| Participants | % | TCA | TCA-I | f | m | AG1 | AG2 | AG3 | |
|---|---|---|---|---|---|---|---|---|---|
| No change in attitude | 10 | 33.33 | 4 | 6 | 4 | 6 | 5 | 1 | 4 |
| Expectations met/neutral | 9 | 30 | 4 | 5 | 4 | 5 | 4 | 1 | 4 |
| nothing new/surprising | 1 | 3.33 | 0 | 1 | 0 | 1 | 1 | 0 | 0 |
| Change in attitude | 20 | 66.66 | 11 | 9 | 12 | 8 | 10 | 8 | 2 |
| Positive change in attitude | 15 | 50 | 10 | 5 | 10 | 6 | 9 | 7 | 0 |
| Increased trust/better than expectation | 14 | 46.66 | 9 | 5 | 9 | 5 | 7 | 7 | 0 |
| Faster adaption/feels normal | 4 | 13.33 | 4 | 0 | 3 | 1 | 4 | 0 | 0 |
| Negative change in attitude | 4 | 16.66 | 0 | 4 | 2 | 3 | 2 | 1 | 2 |
| less autonomous than expected | 4 | 13.33 | 0 | 3 | 1 | 3 | 1 | 1 | 2 |
| Insecurities confirmed and strengthened | 2 | 6.66 | 0 | 2 | 2 | 0 | 1 | 0 | 1 |
| Positive and negative influence on attitude | 1 | 3.33 | 1 | 0 | 0 | 1 | 1 | 0 | 0 |
| Analyzed Interviews | 30 | 100 | 15 | 15 | 17 | 13 | 15 | 9 | 6 |
| Participants | % | TCA | TCA-I | f | m | AG1 | AG2 | AG3 | |
|---|---|---|---|---|---|---|---|---|---|
| Evaluation of visibility/conspicuity | 9 | 30 | 6 | 3 | 6 | 3 | 5 | 4 | 0 |
| Very recognizable | 2 | 6.66 | 1 | 1 | 2 | 0 | 1 | 1 | 0 |
| Not recognizable | 7 | 23.33 | 5 | 2 | 4 | 3 | 4 | 3 | 0 |
| Evaluation of content | 9 | 30 | 4 | 5 | 4 | 5 | 4 | 3 | 2 |
| Enough/good | 5 | 16.66 | 3 | 2 | 2 | 3 | 3 | 2 | 0 |
| Too much | 4 | 13.33 | 1 | 3 | 2 | 2 | 1 | 1 | 2 |
| Evaluation of comprehensibility | 29 | 96.67 | 14 | 15 | 15 | 14 | 14 | 9 | 6 |
| Comprehensible | 17 | 56.66 | 7 | 5 | 2 | 10 | 5 | 4 | 3 |
| Not comprehensible | 12 | 40 | 7 | 10 | 13 | 4 | 9 | 5 | 3 |
| Icons | 12 | 40 | 5 | 9 | 10 | 4 | 7 | 4 | 3 |
| sensor bars | 6 | 20 | 2 | 4 | 4 | 2 | 3 | 3 | 0 |
| Other icons | 5 | 16.66 | 0 | 5 | 4 | 1 | 4 | 1 | 0 |
| Combination icons and words | 6 | 20 | 1 | 5 | 6 | 0 | 4 | 0 | 2 |
| Timing/Consequences | 7 | 23.33 | 4 | 3 | 6 | 1 | 3 | 2 | 2 |
| Relation to participants’ actions | 7 | 23.33 | 3 | 4 | 7 | 0 | 3 | 2 | 2 |
| No improvement wishes | 3 | 10 | 1 | 2 | 0 | 3 | 1 | 2 | 0 |
| Improvement wishes | 27 | 86.66 | 13 | 13 | 16 | 10 | 14 | 7 | 6 |
| Color | 12 | 40 | 7 | 5 | 6 | 6 | 6 | 5 | 1 |
| Information on behavior | 11 | 36.66 | 6 | 5 | 8 | 3 | 4 | 5 | 2 |
| Instructions to other road users | 7 | 23.33 | 3 | 4 | 6 | 1 | 4 | 1 | 2 |
| On Icons | 12 | 40 | 5 | 7 | 10 | 2 | 8 | 3 | 1 |
| On display | 7 | 23.33 | 3 | 4 | 5 | 2 | 4 | 3 | 0 |
| Warning range | 2 | 6.66 | 2 | 0 | 1 | 1 | 1 | 1 | 0 |
| Warning signal | 4 | 13.33 | 3 | 1 | 3 | 1 | 2 | 2 | 0 |
| Explanation | 3 | 10 | 0 | 3 | 2 | 1 | 1 | 0 | 2 |
| Information on position of other road users | 2 | 6.66 | 1 | 1 | 1 | 1 | 2 | 0 | 0 |
| Information on distance | 3 | 10 | 2 | 1 | 1 | 2 | 0 | 1 | 2 |
| Acoustical signal | 2 | 6.66 | 0 | 2 | 1 | 1 | 0 | 0 | 2 |
| Autonomous car sign | 2 | 6.66 | 0 | 2 | 1 | 1 | 0 | 1 | 1 |
| Analyzed Interviews | 30 | 100 | 15 | 15 | 17 | 13 | 15 | 9 | 6 |
References
- Drive 2 the Future. Available online: https://www.drive2thefuture.eu/ (accessed on 20 December 2020).
- Sucha, M.; Dostal, D.; Risser, R. Pedestrian-Driver Communication and Decision Strategies at Marked Crossings. Accid. Anal. Prev. 2017, 102, 41–50. [Google Scholar] [CrossRef] [Green Version]
- Vinkhuyzen, E.; Cefkin, M. Developing Socially Acceptable Autonomous Vehicles. In Ethnographic Praxis in Industry Conference Proceedings; Wiley: Hoboken, NJ, USA, 2016; Volume 2016, pp. 522–534. [Google Scholar] [CrossRef]
- Holländer, K.; Wintersberger, P.; Butz, A. Overtrust in External Cues of Automated Vehicles: An Experimental Investigation. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Utrecht, The Netherlands, 21–25 September 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 211–221. [Google Scholar]
- Ekman, F.; Johansson, M.; Sochor, J. Creating Appropriate Trust in Automated Vehicle Systems: A Framework for HMI Design. IEEE Trans. Hum. Mach. Syst. 2018, 48, 95–101. [Google Scholar] [CrossRef]
- Lee, J.D.; See, K.A. Trust in Automation: Designing for Appropriate Reliance. Hum. Factors 2004, 46, 50–80. [Google Scholar] [CrossRef]
- Rehrl, K.; Zankl, C. Digibus©: Results from the First Self-Driving Shuttle Trial on a Public Road in Austria. Eur. Transp. Res. Rev. 2018, 10, 51. [Google Scholar] [CrossRef]
- Distler, V.; Lallemand, C.; Bellet, T. Acceptability and Acceptance of Autonomous Mobility on Demand: The Impact of an Immersive Experience. In Proceedings of the CHI 2018—Extended Abstracts of the 2018 CHI Conference on Human Factors in Computing Systems: Engage with CHI, Montreal, QC, Canada, 20 April 2018; Association for Computing Machinery: New York, NY, USA, 2018; p. 612. [Google Scholar]
- Zwicker, L.; Petzoldt, T.; Schade, J.; Schaarschmidt, E. Kommunikation zwischen automatisierten Kraftfahrzeugen und anderen Verkehrsteilnehmern—Was brauchen wir überhaupt. In Hands off, Human Factors Off?—Welche Rolle Spielen Human Factors in der Fahrzeugautomation? Bruder, R., Winner, H., Eds.; Universitäts- und Landesbibliothek Darmstadt: Darmstadt, Germany, 2019; pp. 47–57. [Google Scholar]
- Löcken, A.; Golling, C.; Riener, A. How Should Automated Vehicles Interact with Pedestrians? A Comparative Analysis of Interaction Concepts in Virtual Reality. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Utrecht, The Netherlands, 21–25 September 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 262–274. [Google Scholar]
- Faas, S.M.; Mathis, L.-A.; Baumann, M. External HMI for Self-Driving Vehicles: Which Information Shall Be Displayed? Transp. Res. Part F Traff. Psychol. Behav. 2020, 68, 171–186. [Google Scholar] [CrossRef]
- Clamann, M.; Aubert, M.; Cummings, M.L. Evaluation of Vehicle-to-Pedestrian Communication Displays for Autonomous Vehicles. In Proceedings of the Transportation Research Board 96th Annual Meeting, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Li, Y.; Dikmen, M.; Hussein, T.G.; Wang, Y.; Burns, C. To Cross or Not to Cross: Urgency-Based External Warning Displays on Autonomous Vehicles to Improve Pedestrian Crossing Safety. In Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Toronto, ON, Canada, 23–25 September 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 188–197. [Google Scholar]
- Colley, M.; Rukzio, E. A Design Space for External Communication of Autonomous Vehicles. In Proceedings of the 12th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Washington, DC, USA, 21–22 September 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 212–222. [Google Scholar]
- Dey, D.; Habibovic, A.; Löcken, A.; Wintersberger, P.; Pfleging, B.; Riener, A.; Martens, M.; Terken, J. Taming the EHMI Jungle: A Classification Taxonomy to Guide, Compare, and Assess the Design Principles of Automated Vehicles’ External Human-Machine Interfaces. Transp. Res. Interdiscip. Perspect. 2020, 7, 100174. [Google Scholar] [CrossRef]
- Schieben, A.; Wilbrink, M.; Kettwich, C.; Madigan, R.; Louw, T.; Merat, N. Designing the Interaction of Automated Vehicles with Other Traffic Participants: Design Considerations Based on Human Needs and Expectations. Cogn. Technol. Work 2019, 21, 69–85. [Google Scholar] [CrossRef] [Green Version]
- Mahadevan, K.; Somanath, S.; Sharlin, E. Communicating Awareness and Intent in Autonomous Vehicle-Pedestrian Interaction. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 23–26 April 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 1–12, ISBN 978-1-4503-5620-6. [Google Scholar]
- Owensby, C.; Tomitsch, M.; Parker, C. A Framework for Designing Interactions between Pedestrians and Driverless Cars: Insights from a Ride-Sharing Design Study. In Proceedings of the 30th Australian Conference on Computer-Human Interaction, New York, NY, USA, 4 December 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 359–363. [Google Scholar]
- Rasouli, A.; Kotseruba, I.; Tsotsos, J.K. Understanding Pedestrian Behavior in Complex Traffic Scenes. IEEE Trans. Intell. Veh. 2018, 3, 61–70. [Google Scholar] [CrossRef]
- Kaleefathullah, A.A.; Merat, N.; Lee, Y.M.; Eisma, Y.B.; Madigan, R.; Garcia, J.; de Winter, J. External Human–Machine Interfaces Can Be Misleading: An Examination of Trust Development and Misuse in a CAVE-Based Pedestrian Simulation Environment. Hum. Factors 2020, 0018720820970751. [Google Scholar] [CrossRef]
- Kooijman, L.; Happee, R.; de Winter, J.C.F. How Do EHMIs Affect Pedestrians’ Crossing Behavior? A Study Using a Head-Mounted Display Combined with a Motion Suit. Information 2019, 10, 386. [Google Scholar] [CrossRef] [Green Version]
- Nuñez Velasco, J.P.; Farah, H.; van Arem, B.; Hagenzieker, M.P. Studying Pedestrians’ Crossing Behavior When Interacting with Automated Vehicles Using Virtual Reality. Transp. Res. Part F Traff. Psychol. Behav. 2019, 66, 1–14. [Google Scholar] [CrossRef] [Green Version]
- De Clercq, K.; Dietrich, A.; Núñez Velasco, J.P.; de Winter, J.; Happee, R. External Human-Machine Interfaces on Automated Vehicles: Effects on Pedestrian Crossing Decisions. Hum. Factors 2019, 61, 1353–1370. [Google Scholar] [CrossRef] [Green Version]
- Moore, D.; Currano, R.; Strack, G.E.; Sirkin, D. The Case for Implicit External Human-Machine Interfaces for Autonomous Vehicles. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Utrecht, The Netherlands, 21–25 September 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 295–307. [Google Scholar]
- Rodríguez Palmeiro, A.; van der Kint, S.; Vissers, L.; Farah, H.; de Winter, J.C.F.; Hagenzieker, M. Interaction between Pedestrians and Automated Vehicles: A Wizard of Oz Experiment. Transp. Res. Part F Traff. Psychol. Behav. 2018, 58, 1005–1020. [Google Scholar] [CrossRef] [Green Version]
- Dey, D.; Terken, J. Pedestrian Interaction with Vehicles: Roles of Explicit and Implicit Communication. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, New York, NY, USA, 24 September 2017; Association for Computing Machinery: New York, NY, USA, 2017; pp. 109–113. [Google Scholar]
- Deb, S.; Strawderman, L.J.; Carruth, D.W. Investigating Pedestrian Suggestions for External Features on Fully Autonomous Vehicles: A Virtual Reality Experiment. Transp. Res. Part F Traff. Psychol. Behav. 2018, 59, 135–149. [Google Scholar] [CrossRef]
- Mahadevan, K.; Sanoubari, E.; Somanath, S.; Young, J.E.; Sharlin, E. AV-Pedestrian Interaction Design Using a Pedestrian Mixed Traffic Simulator. In Proceedings of the 2019 on Designing Interactive Systems Conference, New York, NY, USA, 18 June 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 475–486. [Google Scholar]
- Colley, M.; Walch, M.; Gugenheimer, J.; Askari, A.; Rukzio, E. Towards Inclusive External Communication of Autonomous Vehicles for Pedestrians with Vision Impairments. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, New York, NY, USA, 21 April 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 1–14. [Google Scholar]
- Ackermann, C.; Beggiato, M.; Schubert, S.; Krems, J.F. An Experimental Study to Investigate Design and Assessment Criteria: What Is Important for Communication between Pedestrians and Automated Vehicles? Appl. Ergon. 2019, 75, 272–282. [Google Scholar] [CrossRef]
- Merat, N.; Louw, T.; Madigan, R.; Wilbrink, M.; Schieben, A. What Externally Presented Information Do VRUs Require When Interacting with Fully Automated Road Transport Systems in Shared Space? Accid. Anal. Prev. 2018, 118, 244–252. [Google Scholar] [CrossRef]
- Lee, J.D.; Kolodge, K. Understanding Attitudes Towards Self-Driving Vehicles: Quantitative Analysis of Qualitative Data. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2018, 62, 1399–1403. [Google Scholar] [CrossRef]
- Wiener Linien. Passenger Information. Available online: https%3A%2F%2Fwww.wienerlinien.at%2Feportal3%2Findex.jsp (accessed on 30 January 2021).
- SAE On-Road Automated Vehicle Standards Committee. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- Fröhlich, P.; Schatz, R.; Buchta, M.; Schrammel, J.; Suette, S.; Tscheligi, M. “What’s the Robo-Driver up to?” Requirements for Screen-Based Awareness and Intent Communication in Autonomous Buses. i-com 2019, 18, 151–165. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.-Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. arXiv 2018, arXiv:1708.02002. Available online: https://openaccess.thecvf.com/content_ICCV_2017/papers/Lin_Focal_Loss_for_ICCV_2017_paper.pdf (accessed on 16 February 2021).
- NVIDIA. TensorRT. Available online: https://developer.nvidia.com/tensorrt (accessed on 8 December 2020).
- Dehn, D.M. Assessing the Impact of Automation on the Air Traffic Controller: The SHAPE Questionnaires. Air Traff. Control Q. 2008, 16, 127–146. [Google Scholar] [CrossRef]
- MAXQDA. All-In-One Qualitative & Mixed Methods Data Analysis Tool. Available online: https://www.maxqda.com/ (accessed on 10 January 2021).
- Rettenmaier, M.; Schulze, J.; Bengler, K. How Much Space Is Required? Effect of Distance, Content, and Color on External Human–Machine Interface Size. Information 2020, 11, 346. [Google Scholar] [CrossRef]
- Risto, M.; Emmenegger, C.; Vinkhuyzen, E.; Cefkin, M.; Hollan, J. Human-Vehicle Interfaces: The Power of Vehicle Movement Gestures in Human Road User Coordination. In Proceedings of the 2017 Driving Assessment Conference, Manchester, VT, USA, 28 June 2017; pp. 186–192. [Google Scholar]














| Iconic Awareness Communication (TCA) | Iconic Awareness and Textual Intent Communication (“Bus Starts”, TCA-I) | Iconic Awareness and Textual Intent Communication (“Bus Brakes”, TCA-I) |
|---|---|---|
 |  |  |
| Dependent Variable | Statement | Answer Options |
|---|---|---|
| 1. comprehensibility of the AS’s behavior | I. The interaction with the automated bus was… II. I have been able to understand the bus’s behavior. |     |
| 2. predictability of the AS’s behavior | I. I have been able to predict the bus’s behavior. |  |
| 3. sense of safety | I. I felt safe. II. I felt insecure when being confronted with the AS. |  |
| 4. trust in communication | I. The AS’s communication was useful. II. The AS’s communication was reliable. III. The AS’s communication worked accurately and robustly. IV. The AS’s communication was understandable. |  |
| Sample Distribution According to… | Number of Participants | TCA | TCA-I | ||
|---|---|---|---|---|---|
| Test condition | TCA: | only iconic awareness communication | 15 | 15 | - |
| TCA-I: | both iconic awareness communication and textual intent communication | 15 | - | 15 | |
| Gender | m: | male participants | 14 | 8 | 6 |
| f: | female participants | 16 | 7 | 9 | |
| Age group | AG1: | between 20 and 39 years old | 15 | 8 | 7 |
| AG2: | between 40 and 59 years old | 9 | 5 | 4 | |
| AG3: | older than 59 years | 6 | 2 | 4 | |
| CC | TCA | TCA-I | TCA Compared to CC | TCA-I Compared to CC | TCA Compared to TCA-I | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Statement | Mdn | IQR | Mdn | IQR | Mdn | IQR | V | p | V | p | W | p |
| 3.I I felt safe. | 6 | 1 | 6 | 1 | 6 | 1 | 9 | 0.76 | 2.5 | 0.20 | 105 | 0.74 |
| 3.II I felt insecure when being confronted with the AS. | 1 | 2 | 1 | 2.5 | 1 | 2.5 | 14 | 1 | 12 | 0.79 | 106 | 0.79 |
| TCA | TCA-I | TCA Compared to TCA-I | ||||
|---|---|---|---|---|---|---|
| Statement | Mdn | IQR | Mdn | IQR | W | p |
| 4.I The AS’s communication was useful. | 5 | 4 | 4 | 1.5 | 115.5 | 0.92 |
| 4.II The AS’s communication was reliable. | 5 | 3 | 5 | 3 | 109 | 0.90 |
| 4.III The AS’s communication worked accurately and robustly. | 5 | 2.5 | 6 | 1.5 | 84 | 0.21 |
| 4.IV The AS’s communication was understandable. | 5 | 4 | 5 | 2.5 | 105.5 | 0.78 |
| CC | TCA | TCA-I | TCA Compared to CC | TCA-I Compared to CC | TCA Compared to TCA-I | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Statement | Mdn | IQR | Mdn | IQR | Mdn | IQR | V | p | V | p | W | p |
| 1.I The interaction with the AS was … | ||||||||||||
| (a) Intuitively learnable/difficult to learn | 1 | 1 | 0 | 1 | 1 | 1 | 5 | 1 | 15.5 | 0.86 | 95.5 | 0.45 |
| (b) complicated/uncomplicated | 6 | 1 | 6 | 1 | 6 | 1 | 15 | 0.37 | 15 | 0.71 | 107.7 | 0.83 |
| (c) unambiguous/confusing | 1 | 2 | 1 | 2 | 1 | 2 | 12 | 0.41 | 29 | 0.75 | 104.5 | 0.74 |
| 1.II I’ve been able to understand the AS’s behavior. | 5 | 2 | 5 | 0 | 5 | 2 | 42.5 | 0.54 | 8 | 0.67 | 99 | 0.57 |
| 2.I I’ve been able to predict the AS’s behavior. | 6 | 1 | 4 | 1 | 4 | 2 | 34 | 0.44 | 15 | 0.93 | 125 | 0.61 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Forke, J.; Fröhlich, P.; Suette, S.; Gafert, M.; Puthenkalam, J.; Diamond, L.; Zeilinger, M.; Tscheligi, M. Understanding the Headless Rider: Display-Based Awareness and Intent-Communication in Automated Vehicle-Pedestrian Interaction in Mixed Traffic. Multimodal Technol. Interact. 2021, 5, 51. https://0-doi-org.brum.beds.ac.uk/10.3390/mti5090051
Forke J, Fröhlich P, Suette S, Gafert M, Puthenkalam J, Diamond L, Zeilinger M, Tscheligi M. Understanding the Headless Rider: Display-Based Awareness and Intent-Communication in Automated Vehicle-Pedestrian Interaction in Mixed Traffic. Multimodal Technologies and Interaction. 2021; 5(9):51. https://0-doi-org.brum.beds.ac.uk/10.3390/mti5090051
Chicago/Turabian StyleForke, Julia, Peter Fröhlich, Stefan Suette, Michael Gafert, Jaison Puthenkalam, Lisa Diamond, Marcel Zeilinger, and Manfred Tscheligi. 2021. "Understanding the Headless Rider: Display-Based Awareness and Intent-Communication in Automated Vehicle-Pedestrian Interaction in Mixed Traffic" Multimodal Technologies and Interaction 5, no. 9: 51. https://0-doi-org.brum.beds.ac.uk/10.3390/mti5090051