
Enhancing the Accuracy of Solving Riccati Fractional Differential Equations




Center for Research and Training in Innovative Techniques of Applied Mathematics in Engineering, University Politehnica of Bucharest, 060042 Bucharest, Romania
*
Author to whom correspondence should be addressed.
Fractal Fract. 2022, 6(5), 275; https://0-doi-org.brum.beds.ac.uk/10.3390/fractalfract6050275
Submission received: 9 May 2022
/
Revised: 14 May 2022
/
Accepted: 19 May 2022
/
Published: 20 May 2022
(This article belongs to the Special Issue Application of Fractional Calculus as an Interdisciplinary Modeling Framework)
Abstract
:In this paper, we solve Riccati equations by using the fractional-order hybrid function of block-pulse functions and Bernoulli polynomials (FOHBPB), obtained by replacing x with , with positive . Fractional derivatives are in the Caputo sense. With the help of incomplete beta functions, we are able to build exactly the Riemann–Liouville fractional integral operator associated with FOHBPB. This operator, together with the Newton–Cotes collocation method, allows the reduction of fractional differential equations to a system of algebraic equations, which can be solved by Newton’s iterative method. The simplicity of the method recommends it for applications in engineering and nature. The accuracy of this method is illustrated by five examples, and there are situations in which we obtain accuracy eleven orders of magnitude higher than if .
1. Introduction
Generalizing ordinary differential equations to an arbitrary (non-integer) order, we obtain fractional differential equations (FDEs). A compelling description regarding the progress of fractional differential operators is given by [1,2,3]. The wide usability of FDEs in numerous areas of science and engineering has led to increased interest regarding the research in this considered field (as seen in [4,5,6,7,8,9,10]).
FDEs are eligible for playing a key role in a wide spectrum of applications. Consequently, research in this area has grown significantly, and in the last few years, many papers have shown interest in finding efficient numerical methods for FDE solution. Many of the published methods use Fourier transforms [11], eigenvector expansion [12], Laplace transforms [13], variational iteration methods [14], the finite difference method (FDM) [15], the Adomian decomposition method [16], the power series method [17], the homotopy perturbation method [18], the differential transform method [19], the homotopy analysis method [20], the Chebyshev and Legendre polynomials method [21], and fractional-order Bernoulli wavelets [22].
Dynamical systems can be solved using orthogonal functions. Firstly, it is necessary to transform through integration the type of equation, from differential to integral. Then, using orthogonal functions, we are enabled to approximate different signals used in the equation. Moreover, it is mandatory to eliminate the integral operations and, by employing the operational matrix of integration, this can be accomplished. The final unique form of the matrix is given by the particular orthogonal functions. As for now, we can separate into three different classes the orthogonal functions. The first class is represented by types of functions such as Haar, Walsh, or block-pulse, which are examples of sets that consist of functions of piecewise constant basis. Secondly, polynomials such as Chebyshev, Legendre, or Laguerre, which are examples of orthogonal polynomials, give the second class. In the case of this class, in order to obtain computational effectiveness, the shifted Legendre polynomials are to be used [23]. Lastly, the final class is represented by sine-cosine functions in the Fourier series. An example of polynomials and series that possess the operational matrix of integration but are not orthogonal functions is given by the Bernoulli polynomials and Taylor series. Article [24] shows how the Bernoulli polynomials approximate better the arbitrary time function than shifted Legendre polynomials do.
It is possible to use the operational matrix for the Riemann–Liouville integration, in order to use wavelets to solve the majority of the fractional calculus problems. We obtain the form of the matrix from the following correlation:
The Riemann–Liouville fractional integral operator of order is given by and the operational matrix for Riemann–Liouville integration for different wavelets is represented by . The basis functions give the elements of . Recent papers show how wavelets such as Chebyshev [25], Legendre [26], CAS (cosine and sine) [27], and Haar [28] can be utilized. In order to obtain it is necessary to expand to block-pulse functions the considered wavelets, and then, to calculate , methods have used the operational matrix for Riemann–Liouville integration of block-pulse functions. In order to obtain using Bernoulli wavelets in [29], the paper firstly utilized the expansion of Bernoulli wavelets by using Bernoulli polynomials in [29]; then, to calculate , the operational matrix for Riemann–Liouville integration of Bernoulli polynomials was employed. It is noted that these wavelets did not calculate directly and was obtained by using some approximations.
In 2013, article [30] was published and it described the usage of the fractional-order Legendre functions for solving FDEs using the spectral technique. In [31], fractional partial differential equations are solved using a new Tau technique, which makes use of the operational matrix of fractional derivative and integration. Moreover, in order to solve systems of fractional differential equations, Bhrawy et al. [32], starting from the generalized Laguerre polynomials, have used the fractional-order generalized Laguerre functions. The truncated fractional Bernstein series was described by Yuzbasi [33] by using the change x to , for solving the fractional Riccati-type differential equations. The development of fractional calculus based on Legendre functions adapted to the range in order to obtain numerical solutions of fractional partial differential equations was also presented by the authors in [34]. Furthermore, in recent years, Rahimkhani et al. constructed fractional-order Bernoulli wavelets by making a change of variable of x to () into the Bernoulli wavelets and solved selected problems [22,35,36,37,38].
In order to be able to solve different selected smooth and non-smooth problems that regard fields such as engineering, we can use the hybrid functions consisting of the combination of block-pulse functions with Chebyshev polynomials [39,40], Legendre polynomials [41,42], Taylor series [43,44], or Bernoulli polynomials [24,45]. Papers [46,47,48] present how the direct derivation of the hybrid of block-pulse functions and Bernoulli polynomials to which the Riemann–Liouville fractional integral operator is applied can be accomplished. Compared to other published methods, the results that have been obtained in references [46,47,48] are noticeably more accurate.
In this paper, we apply the fractional-order hybrid function of block-pulse functions and Bernoulli polynomials, abbreviated with FOHBPB, resulting consequently from the substitution of t to , where , to solve Riccati equations. An exact Riemann–Liouville fractional integral operator for the FOHBPB is derived. In order to reduce to the solution of the algebraic equations the solution of the FDEs and system of FDEs, we make use of the abovementioned operator. In the present paper, since we do not use any approximation to find , for certain examples considered, we obtain better results than those obtained in [22,33,49,50,51].
The outline of this paper has the following order. In the Section 2, we present definitions and mathematical preliminaries of fractional calculus necessary for the presented ongoing development. In the Section 3, the Riemann–Liouville fractional integral operator will be derived accordingly for FOHBPB. Section 4 consists of the numerical and error analysis regarding the method which is described in this paper, and, in the Section 5, by displaying five examples of numerical calculations, the article indicates how the resulting numerical data lead to increased accuracy and demonstrates the convergence of the numerical scheme proposed.
2. Preliminaries and Notations
Firstly, we begin by describing the fractional operators, such as Caputo’s derivative and the Riemann–Liouville integration, followed by a brief description of the characteristics regarding the fractional calculus theory, which has implications in the mathematical proofs.
Definition 1.
The Caputo’s fractional derivative of order q has the following definition [13]
where the smallest integer greater than q is n and the order of the derivative is given by .
Definition 2.
The Riemann–Liouville fractional integral operator of order q has the following definition [13]
Proposition 1.
The Riemann–Liouville integral and Caputo derivative comply with the following proposition [52]
Definition 3.
Taylor’s generalized formula has the following definition
For values of , we have . Consequently,
where , for all . Moreover,
with . In order to obtain Taylor’s classical formula, we make and Equation (3) is reduced to the desired form.
Next, we define the incomplete beta function, utilized in modifying the Riemann–Liouville operator of fractional integration.
Definition 4.
Hence, the incomplete beta function has the following definition
By substituting t to , in the hybrid function of block-pulse and Bernoulli polynomials, we obtain the FOHBPB, noted as .
Definition 5.
On the interval the function is defined as
where the order of block-pulse functions and the order of Bernoulli polynomials are and , consequently. As defined by [53], represent the Bernoulli polynomials of order m and have the following representation
The Bernoulli numbers are noted as , with as in [54].
Proposition 2.
Obtaining the best approximation of function f, where , while using the hybrid functions as seen in [47] is
with
and with
3. Riemann–Liouville Fractional Integral Operator for Hybrid of Block-Pulse Functions and Bernoulli Polynomials
The derivation of the Riemann–Liouville fractional integral operator, noted as , for the fractional-order Bernoulli polynomials, , will be presented in this section. Furthermore, we use the incomplete beta function to determine the fractional integral operator.
We have the following notation
where
Theorem 1.
Consequently, we obtain
where
and
4. The Numerical Method and Error Analysis
The study in this paper is performed for the Riccati fractional differential equation, which is represented mathematically as follows
with , , and continuous functions on .
The equation is conditioned by
where s are constants.
We expand Caputo’s fractional derivative by the hybrid functions as
and by using the proposition described at (2) and Equation (7), we obtain
and from Equations (11)–(13), we obtain
In order to obtain a number of algebraic equations using Newton’s iterative method to solve these equations for the vector C, which is unknown, we have to collocate them in the Newton–Cotes nodes, described as
The result gives a number of algebraic equations.
In the latter part of this section, we describe how the approximation of a function with regard to the FOHBPB converges. When ∞ is approached by N or M, we find that converges to .
Theorem 2.
Remark 1.
The number N, which represents the multitude of regarded intervals, and M, which represents the number in each subinterval of elements of the basis, constitute two degrees of freedom. Hence, if we consider an infinite number of intervals and M is constant, we obtain
which leads to
However, if N is fixed and we consider an infinite number in each subinterval of elements of the basis, the resulting form of Equation (15) is
5. Illustrative Example
Five examples are considered. The Mathematica version 11 package was used for all numerical calculations.
5.1. Example 1
We consider the following Riccati fractional differential equation [57]
subjected to . We know the solution when , having the following expression
We solve the present problem using and . Consequently, it is presented how we expand into fractional-order hybrid functions the Caputo fractional derivative
and using this result, together with Equation (2), one obtains
To determine the C constants in Equation (19), we use Newton’s iterative method, placing the equation in the Newton–Cotes nodes given by the expressions
The result gives a number of algebraic equations.
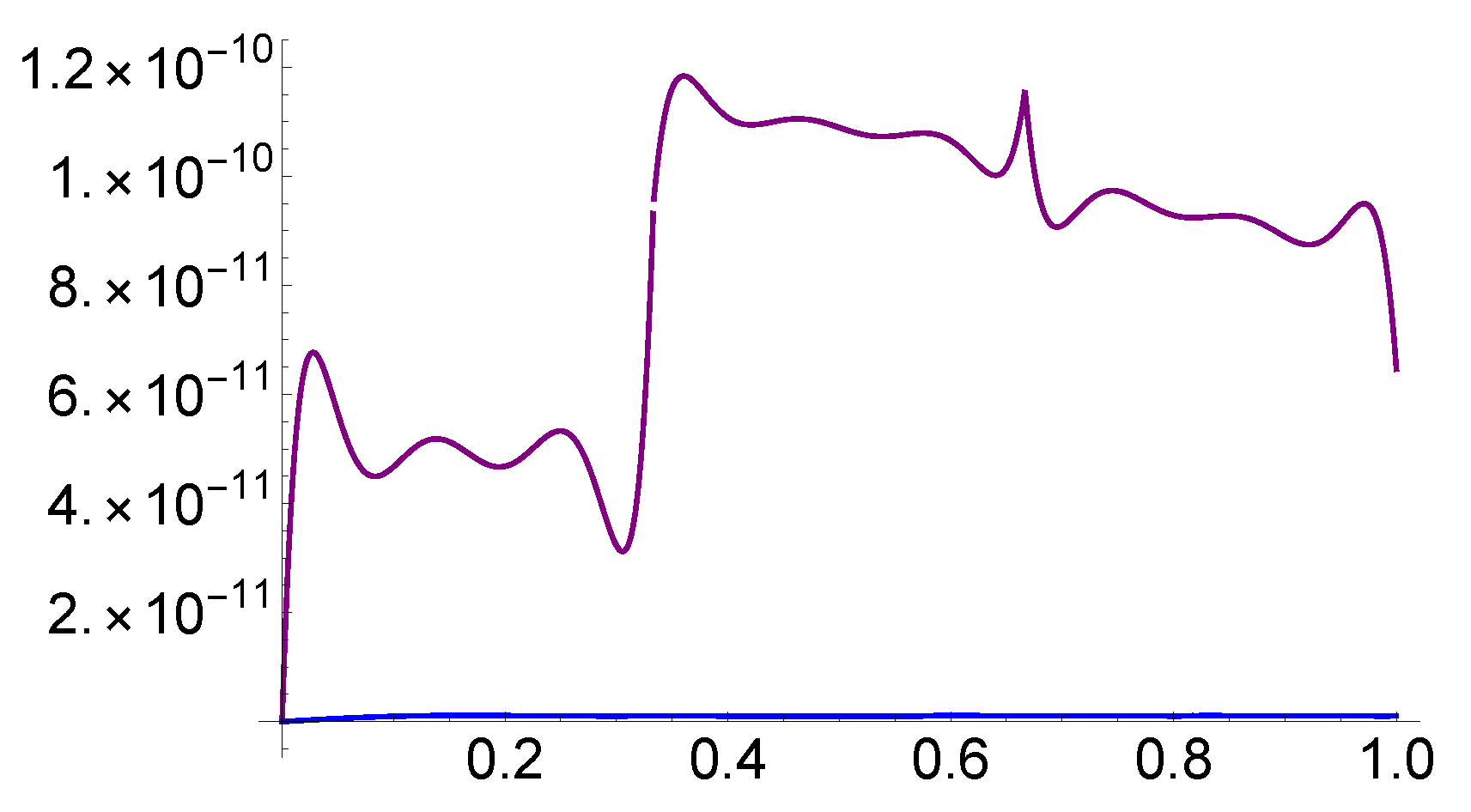
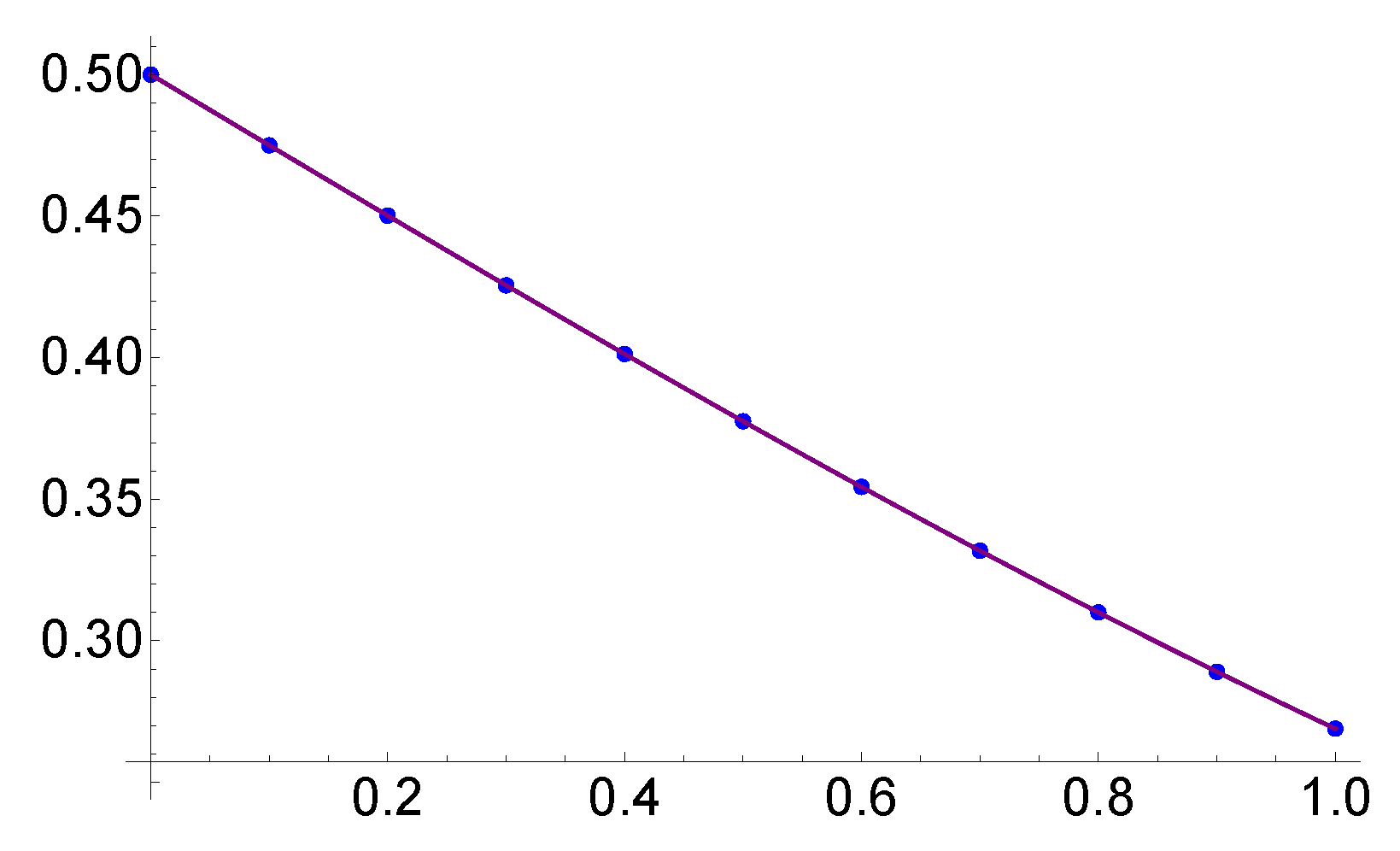
In Figure 1, we make a comparison regarding the absolute errors for when (purple) and (blue), and we notice that our method improves the classical method by approximately 11 orders of magnitude. In Figure 2, we compare the exact and the approximate solutions for and , and we notice the perfect overlap of the two graphs.
5.2. Example 2
Next, the following equation is considered
and
which is subjected to the initial condition .
This problem admits the exact solution, which is given by the expression
We solve the problem for and , with . Through
we obtain
and these results entered into Equation (20) give
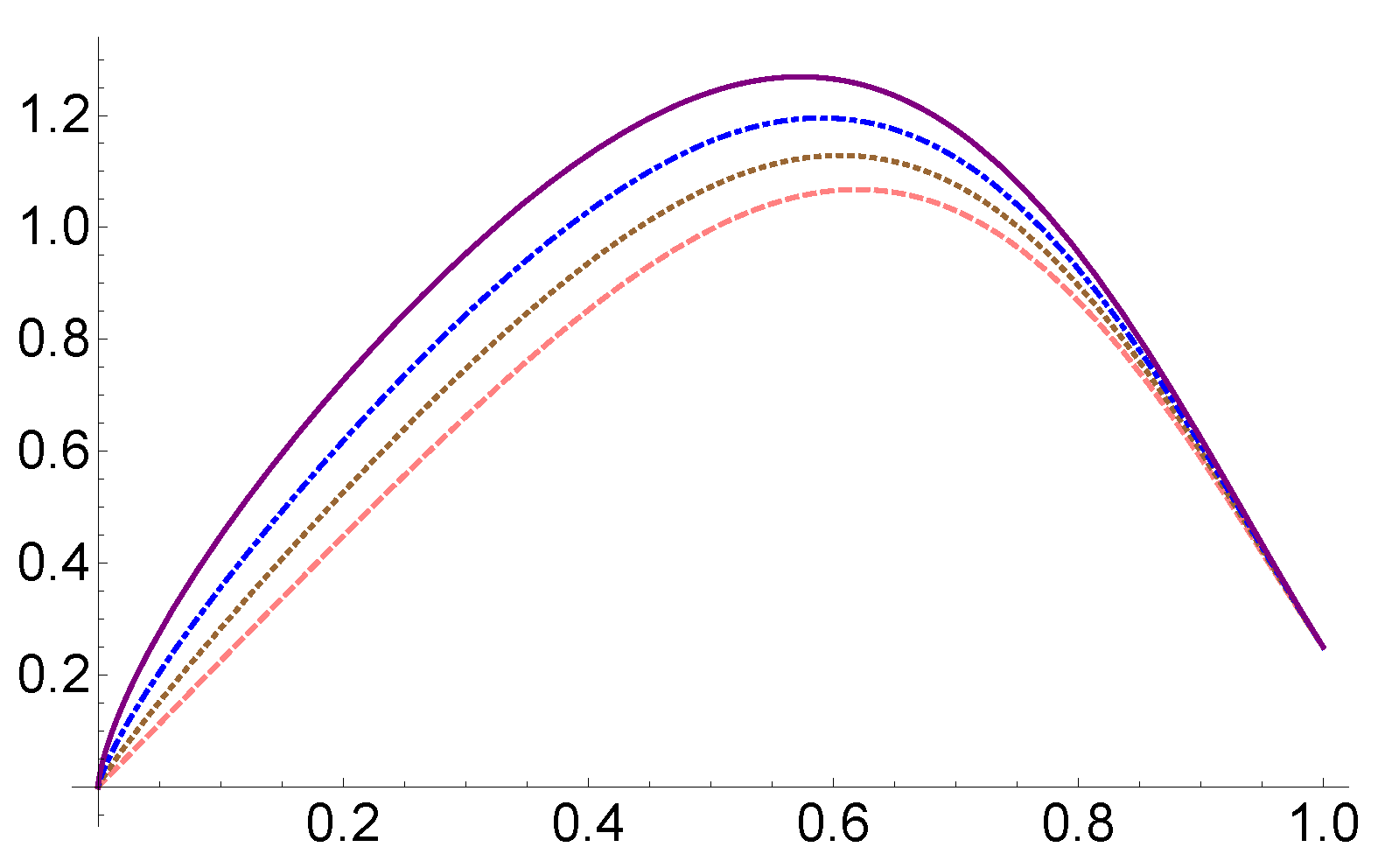
Collocating Equation (20) at Newton–Cotes nodes, we obtain a system of algebraic equations, and the solution of this system gives the constants C. For this setup, we obtain the exact solution when . In Figure 3, we graphically represent the numerical solution for (dashed, opal), (dotted, brown), (dashed-dotted, blue), and (continuous, purple).
5.3. Example 3
In the case , the exact solution is known
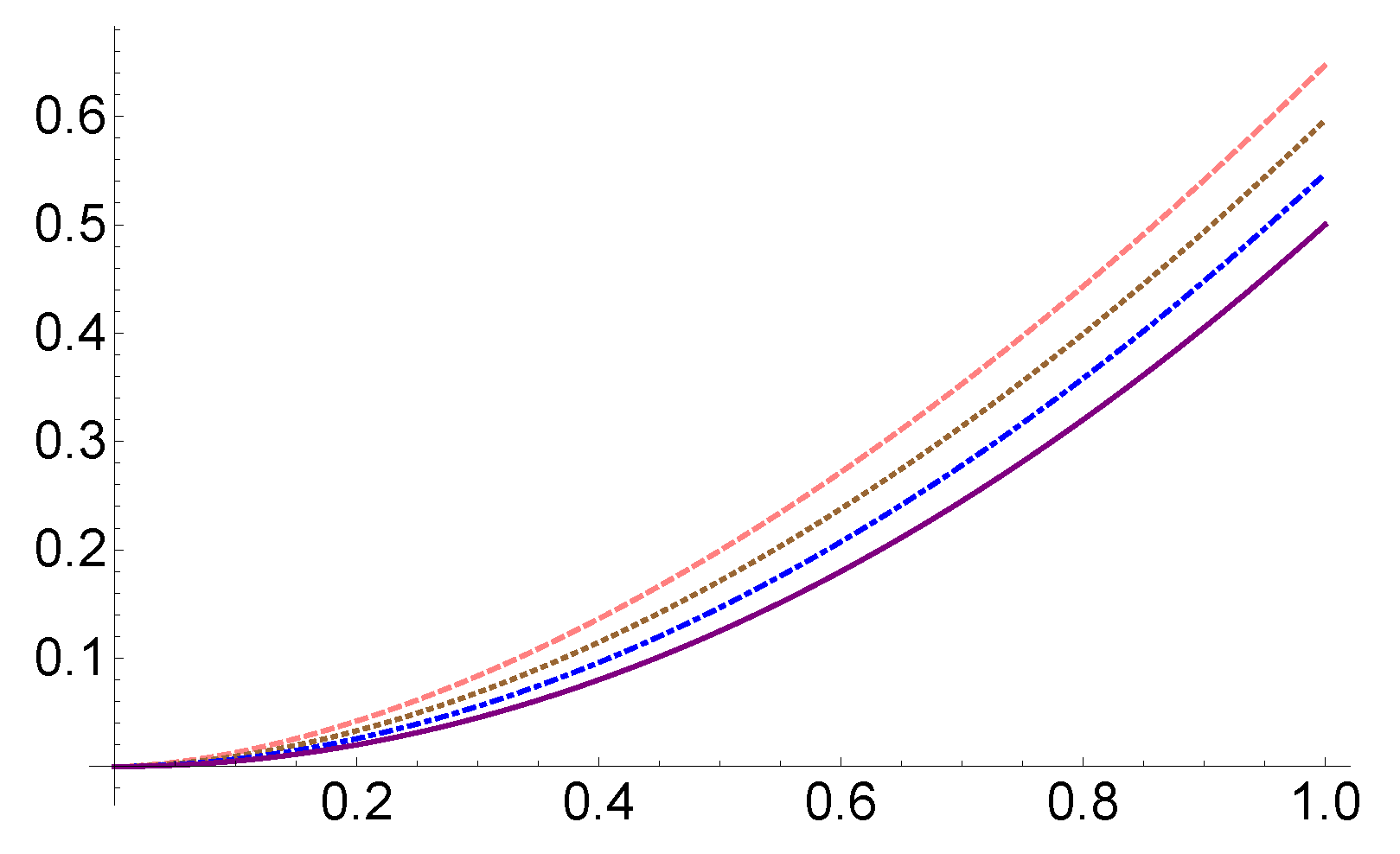
We solve this problem with and . We compare the absolute errors of the exact solution obtained by our method with other methods with the same dimension of the base, in Table 1. In Figure 4, we represent the approximate solutions , , with (dashed), (dotted), (dashed-dotted), and exact solution (continuous).
5.4. Example 4
The solution of this equation is
In order to solve this example, we consider and , with . The comparison between our results and the results in [22] for a four-dimensional base are presented in Table 2. The absolute errors for for (purple) and (blue) are represented in Figure 5. In conclusion, for this equation, the fractional method is more efficient than the ordinary method. In Figure 6, we represent the approximate solutions for with , with (dashed), (dotted), (dashed-dotted), and exact solution (continuous).
5.5. Example 5
The problem has exact solution
where is the Mittag–Leffler function that has the following definition
We solve this example considering and , with . The comparison between our results and results [51] with 25 basis elements is presented in Table 3. In Figure 7, we compare the absolute errors for with and when (purple) and (blue), and in Figure 8, we plot the approximate solutions for , , with (dashed), (dotted), (dashed-dotted), and (continuous).
6. Conclusions
In this paper, new functions called fractional-order hybrid functions of block-pulse and Bernoulli polynomials based on Bernoulli polynomials and block functions have been defined. Moreover, we have determined the fractional-order integration and derivative formulas of the fractional-order hybrid functions. Furthermore, making use of the mentioned collocation method and employing the fractional integration operational matrix, we were able to make approximations concerning the solution of the linear and nonlinear initial value problems, which are subjected to a fractional-order q. The benefits of this method are noticeable in Figure 1 and Figure 2: in Figure 1, we illustrate the absolute errors when and , reflecting the accuracy of the solutions obtained from the system of algebraic equations, and in Figure 2, we compare the exact and approximate solution for and . As a result, we observe that the fractional method is of high accuracy, as, for , the absolute error is minimal.
This method consists of the derived Riemann–Liouville fractional integral operator applied for the fractional-order Bernoulli polynomials. The final form of the modified polynomials has a dependency of the incomplete beta function defined in Equation (4). Using this fractional integral operator and the Newton–Cotes nodes for collocation, we determine a system of algebraic equations. In order to solve these equations, we have to use Newton’s iterative method.
Following the direct derivation of the Riemann–Liouville fractional integral operator for a hybrid of block-pulse functions and Bernoulli polynomials, as presented in [46,47,48], the advantages become apparent. This operator is used to reduce to the solution of algebraic equations the solution of the FDEs and systems of FDEs, which helps to solve problems found in engineering and multiple other areas of science.
We considered five examples that clearly indicate the advantages of the current method and illustrate its efficiency. The illustrative examples point towards the conclusion that the presented method is more efficient than the ordinary one. For example, in Figure 5, we present the absolute errors for with and . Similarly to Example 1, the greater is, the lower the absolute errors are, which clearly shows the benefits. In correlation to Figure 5, we plotted the approximate solutions shown in Figure 6 when , with q taking different values, for and . The result indicates that the solutions, based on the necessary approximations, lead to the ordinary solution, being consequently convergent. Figure 3, corresponding to Example 2, also shows that the approximate solutions converge to the ordinary one, thus emphasizing the accuracy of the fractional method.
In Example 3, we show the accuracy of the fractional method, for and . Table 1 compares the results of our method with methods [33,49,50]. The accuracy of this method is less than , whereas the other methods present accuracies of , and , respectively. Table 2, corresponding to Example 4, compares the results of method [22] with our method. Our results have an error of less than and , compared to errors such as and when and , thus indicating that the present method has a higher grade of accuracy than those cited. In the last example, Table 3 shows that our results are of higher accuracy compared to the results determined in [51]. The results obtained with the present method are very accurate, generating errors of less than in Examples 1 and 3, in 4, and in 5.
The numerical method associated with this paper is simple and does not require high complexity in programming. After obtaining these equations, we collocate them in the Newton–Cotes nodes, resulting in a number of algebraic equations. Using Newton’s iterative method, we solve these equations for the vector C.
Author Contributions
Conceptualization, O.P.; methodology, A.T. and O.P.; software, A.T., F.D. and O.P.; validation, A.T., F.D. and O.P.; formal analysis, A.T., F.D. and O.P.; investigation, A.T., F.D. and O.P.; resources, A.T., F.D. and O.P.; data curation, A.T., F.D. and O.P.; writing—original draft preparation, A.T., F.D. and O.P.; writing—review and editing, A.T., F.D. and O.P.; visualization, A.T., F.D. and O.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Oldham, K.B.; Spanier, J. The Fractional Calculus; Academic Press: New York, NY, USA, 1974. [Google Scholar]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; John Wiley: New York, NY, USA, 1993. [Google Scholar]
- Machado, J.T.; Kiryakova, V.; Mainardi, F. Recent history of fractional calculus. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 1140–1153. [Google Scholar] [CrossRef] [Green Version]
- Bagley, R.L.; Torvik, P.J. Fractional calculus in the transient analysis of viscoelastically damped structures. AIAA J. 1985, 23, 918–925. [Google Scholar] [CrossRef]
- Baillie, R. Long memory processes and fractional integration in econometrics. J. Econom. 1996, 73, 5–59. [Google Scholar] [CrossRef]
- Mainardi, F. Some Basic Problems in Continuum and Statistical Mechanics. In Fractals and Fractional Calculus in Continuum Mechanics; Carpinteri, A., Mainardi, F., Eds.; Springer: New York, NY, USA, 1997. [Google Scholar]
- Rossikhin, Y.; Shitikova, M.V. Applications of fractional calculus to dynamic problems of linear and nonlinear hereditary mechanics of solids. Appl. Mech. Rev. 1997, 50, 15–67. [Google Scholar] [CrossRef]
- Oldham, K.B. Fractional differential equations in electrochemistry. Adv. Eng. Softw. 2010, 41, 9–12. [Google Scholar] [CrossRef]
- Erturk, V.S.; Odibat, Z.M.; Momani, S. An approximate solution of a fractional order differential equation model of human T-cell lymphotropic virus I (HTLV-I) infection of CD4+ T-cells. Comput. Math. Appl. 2011, 62, 996–1002. [Google Scholar] [CrossRef] [Green Version]
- SEl-Wakil, A.; Abulwafa, E.M.; El-shewy, E.K.; Mahmoud, A.A. Time-Fractional KdV Equation Describing the Propagation of Electron-Acoustic Waves in plasma. Comput. Math. Appl. 2011, 62, 996. [Google Scholar]
- Gaul, L.; Klein, P.; Kemple, S. Damping description involving fractional operators. Mech. Syst. Signal. Process. 1991, 5, 81–88. [Google Scholar] [CrossRef]
- Suarez, L.; Shokooh, A. An eigenvector expansion method for the solution of motion containing fractional derivatives. J. Appl. Mech. 1997, 64, 629–635. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Academic Press: New York, NY, USA, 1998. [Google Scholar]
- Odibat, Z.; Momani, S. Analytical solution of a time-fractional Navier–Stokes equation by Adomian decomposition method. Int. J. Nonlinear Sci. Numer. Simul. 2006, 7, 27. [Google Scholar]
- Meerschaert, M.; Tadjeran, C. Finite difference approximations for two-sided space-fractional partial differential equations. Appl. Numer. Math. 2006, 56, 80–90. [Google Scholar] [CrossRef]
- Daftardar-Gejji, V.; Jafari, H. Solving a multi-order fractional differential equation using Adomian decomposition. Appl. Math. Comput. 2007, 189, 541–548. [Google Scholar] [CrossRef]
- Odibat, Z.; Shawagfeh, N. Generalized Taylor’s formula. Appl. Math. Comput. 2007, 186, 286. [Google Scholar] [CrossRef]
- Abdulaziz, O.; Hashim, I.; Momani, S. Solving systems of fractional differential equations by homotopy-perturbation method. Phys. Lett. A 2008, 372, 451–459. [Google Scholar] [CrossRef]
- Ertrk, V.S.; Momani, S. Solving systems of fractional differential equations using differential transform method. J. Comput. Appl. Math. 2008, 215, 142. [Google Scholar] [CrossRef] [Green Version]
- Hashim, I.; Abdulaziz, O.; Momani, S. Homotopy analysis method for fractional IVPs. J. Commun. Nonlinear Sci. Numer. Simul. 2009, 14, 674–684. [Google Scholar] [CrossRef]
- Bhrawy, A.H.; Tharwat, M.M.; Yildirim, A. A new formula for fractional integrals of Chebyshev polynomials: Application for solving multi-term fractional differential equations. Appl. Math. Model. 2013, 37, 4245–4252. [Google Scholar] [CrossRef]
- Rahimkhani, P.; Ordokhani, Y.; Babolian, E. Fractional-order Bernoulli wavelets and their applications. Appl. Math. Model. 2016, 40, 8087–8107. [Google Scholar] [CrossRef]
- Marzban, H.; Razzaghi, M. Hybrid functions approach for linearly constrained quadratic optimal control problems. Appl. Math. Model. 2003, 27, 471–485. [Google Scholar] [CrossRef]
- Haddadi, N.; Ordokhani, Y.; Razzaghi, M. Optimal control of delay systems by using a hybrid functions approximation. J. Optim. Theory Appl. 2012, 153, 338–356. [Google Scholar] [CrossRef]
- Zhu, L.; Fan, Q. Solving fractional nonlinear Fredholm integro-differential equations by the second kind Chebyshev wavelet. Commun. Nonlinear Sci. Num. Simul. 2012, 17, 2333–2341. [Google Scholar] [CrossRef]
- Heydari, M.H.; Hooshmandasl, M.R.; Mohammadi, F. Legendre wavelets method for solving fractional partial differential equations with Dirichlet boundary conditions. Appl. Math. Comput. 2014, 234, 267–276. [Google Scholar] [CrossRef]
- Saeedi, H.; Moghadam, M.M.; Mollahasani, N.; Chuev, G.N. A CAS wavelet method for solving nonlinear Fredholm integro-differential equations of fractional order. Commun. Nonlinear Sci. Num. Simul. 2011, 16, 1154–1163. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, W. Haar wavelet operational matrix of fractional order integration and its applications in solving the fractional order differential equations. Appl. Math. Comput. 2010, 216, 2276–2285. [Google Scholar] [CrossRef]
- Keshavarz, E.; Ordokhani, Y.; Razzaghi, M. Bernoulli wavelet operational matrix of fractional order integration and its applications in solving the fractional order differential equations. Appl. Math. Model. 2014, 38, 6038–6051. [Google Scholar] [CrossRef]
- Kazem, S.; Abbasbandy, S.; Kumar, S. Fractional-order Legendre functions for solving fractional-order differential equations. Appl. Math. Model. 2013, 37, 5498–5510. [Google Scholar] [CrossRef]
- Yin, F.; Song, J.; Wu, Y.; Zhang, L. Numerical solution of the fractional partial differential equations by the two-dimensional fractional-order Legendre functions. Abstr. Appl. Anal. 2013, 2013, 562140. [Google Scholar] [CrossRef] [Green Version]
- Bhrawy, A.H.; Alhamed, Y.A.; Baleanu, D. New spectral techniques for systems of fractional differential equations using fractional-order generalized Laguerre orthogonal functions. Fract. Calc. Appl. Anal. 2014, 17, 1138. [Google Scholar] [CrossRef]
- Yuzbasi, S. Numerical solutions of fractional Riccati type differential equations by means of the Bernstein polynomials. Appl. Math. Comput. 2013, 219, 6328. [Google Scholar] [CrossRef]
- Chen, Y.; Sun, Y.; Liu, L. Numerical solution of fractional partial differential equations with variable coefficients using generalized fractional-order Legendre functions. Appl. Math. Comput. 2014, 244, 847. [Google Scholar] [CrossRef]
- Rahimkhani, P.; Ordokhani, Y.; Babolian, E. An efficient approximate method for solving delay fractional optimal control problems. Nonlinear Dyn. 2016, 86, 1649–1661. [Google Scholar] [CrossRef]
- Rahimkhani, P.; Ordokhani, Y.; Babolian, E. A new operational matrix based on Bernoulli wavelets for solving fractional delay differential equations. Numer. Algorithms 2017, 74, 223. [Google Scholar] [CrossRef]
- Rahimkhani, P.; Ordokhani, Y.; Babolian, E. Numerical solution of fractional pantograph differential equations by using generalized fractional-order Bernoulli wavelet. J. Comput. Appl. Math. 2017, 309, 493. [Google Scholar] [CrossRef]
- Rahimkhani, P.; Ordokhani, Y.; Babolian, E. Fractional-order Bernoulli functions and their applications in solving fractional Fredholem–Volterra integro-differential equations. Appl. Numer. Math. 2017, 122, 66. [Google Scholar] [CrossRef]
- Razzaghi, M.; Marzban, H.R. Direct method for variational problems via hybrid of block-pulse and Chebyshev functions. Math. Probl. Eng. 2000, 6, 85. [Google Scholar] [CrossRef]
- Wang, X.T.; Li, Y.M. Numerical solutions of integrodifferential systems by hybrid of general block-pulse functions and the second Chebyshev polynomials. Appl. Math. Comput. 2009, 209, 266. [Google Scholar] [CrossRef] [Green Version]
- Razzaghi, M.; Marzban, H.R. A hybrid analysis direct method in the calculus of variations. Int. J. Comput. Math. 2000, 75, 259. [Google Scholar] [CrossRef]
- Singh, V.K.; Pandey, R.K.; Singh, S. A stable algorithm for Hankel transforms using hybrid of Block-pulse and Legendre polynomials. Comput. Phys. Commun. 2010, 181, 1–10. [Google Scholar] [CrossRef]
- Marzban, H.R.; Razzaghi, M. Analysis of time-delay systems via hybrid of block-pulse functions and Taylor series. J. Vib. Control. 2005, 11, 1455. [Google Scholar] [CrossRef]
- Marzban, H.R.; Razzaghi, M. Solution of multi-delay systems using hybrid of block-pulse functions and Taylor series. J. Sound Vib. 2006, 292, 954. [Google Scholar] [CrossRef]
- Mashayekhi, S.; Ordokhani, Y.; Razzaghi, M. Hybrid functions approach for nonlinear constrained optimal control problems. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 1831–1843. [Google Scholar] [CrossRef]
- Mashayekhi, S.; Razzaghi, M. Numerical solution of nonlinear fractional integro-differential equations by hybrid functions. Eng. Anal. Bound. Elem. 2015, 56, 81–89. [Google Scholar] [CrossRef]
- Mashayekhi, S.; Razzaghi, M. Numerical solution of distributed order fractional differential equations by hybrid functions. J. Comput. Phys. 2016, 315, 169–181. [Google Scholar] [CrossRef]
- Mashayekhi, S.; Razzaghi, M. Numerical solution of the fractional Bagley-Torvik equation by using hybrid functions approximation. Math. Method. Appl. Sci. 2016, 39, 353–365. [Google Scholar] [CrossRef]
- Momani, S.; Qaralleh, R. An efficient method for solving systems of fractional integro-differential equations. Comput. Math. Appl. 2006, 52, 459–470. [Google Scholar] [CrossRef] [Green Version]
- Odibat, Z.M.; Momani, S. Modified homotopy perturbation method: Application to quadratic Riccati differential equation of fractional order. Chaos Solitons Fract. 2008, 36, 167–174. [Google Scholar] [CrossRef]
- Kashkari, B.S.H.; Syam, M.I. Fractional-order Legendre operational matrix of fractional integration for solving the Riccati equation with fractional order. Appl. Math. Comput. 2016, 290, 281–291. [Google Scholar] [CrossRef]
- Rehman, M.U.; Khan, R.A. A numerical method for solving boundary value problems for fractional differential equations. Appl. Math. Model. 2012, 36, 894–907. [Google Scholar] [CrossRef]
- Costabile, F.; Dell’Accio, F.; Gualtieri, M.I. A new approach to Bernoulli polynomials. Rend. Mat. Ser. VII 2006, 26, 112. [Google Scholar]
- Arfken, G. Mathematical Methods for Physicists; Academic Press: San Diego, CA, USA, 1985. [Google Scholar]
- Postavaru, O.; Toma, A. Numerical solution of two-dimensional fractional-order partial differential equations using hybrid functions. Partial. Differ. Equ. Appl. Math. 2021, 4, 100099. [Google Scholar] [CrossRef]
- Postavaru, O.; Toma, A. A numerical approach based on fractional-order hybrid functions of block-pulse and Bernoulli polynomials for numerical solutions of fractional optimal control problems. Math. Comput. Simul. 2022, 194, 269–284. [Google Scholar] [CrossRef]
- Bota, C.; Caruntu, B. Analytical approximate solutions for quadratic Riccati differential equation of fractional order using the Polynomial Least Squares Method. Chaos Solitons Fractals 2017, 102, 339–345. [Google Scholar] [CrossRef]
- Singh, H.; Srivastava, H. Jacobi collocation method for the approximate solution of some fractional-order Riccati differential equations with variable coefficients. Physica A 2019, 523, 1130–1149. [Google Scholar] [CrossRef]
- Mohammadi, F.; Cattani, C. A generalized fractional-order Legendre wavelet Tau method for solving fractional differential equations. J. Comput. Appl. Math. 2018, 339, 306–316. [Google Scholar] [CrossRef]
Figure 1.
Absolute errors for , (purple) and (blue), for Example 1.

Figure 2.
Exact and approximate solutions in Example 1, for and .

Figure 3.
with , where (dashed), (dotted), (dashed-dotted), and exact solution (continuous), for Example 2.
Figure 3.
with , where (dashed), (dotted), (dashed-dotted), and exact solution (continuous), for Example 2.

Figure 4.
, where (dashed), (dotted), (dashed-dotted), and exact solution (continuous), with , for Example 3.
Figure 4.
, where (dashed), (dotted), (dashed-dotted), and exact solution (continuous), with , for Example 3.

Figure 5.
The absolute errors for for (purple) and (blue), for Example 4.

Figure 6.
, where (dashed), (dotted), (dashed-dotted), and exact solution (continuous), with , for Example 4.
Figure 6.
, where (dashed), (dotted), (dashed-dotted), and exact solution (continuous), with , for Example 4.

Figure 7.
The absolute errors for for (purple) and (blue), for Example 5.

Figure 8.
, where (dashed), (dotted), (dashed-dotted), and (continuous), with , for Example 5.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Absolute errors for and , , in Example 3.
| x | Method [49] | Method [50] | Method [33] | This Method |
|---|---|---|---|---|
| 0.2 | ||||
| 0.4 | ||||
| 0.6 | ||||
| 0.8 | ||||
| 1.0 |
Table 2.
Absolute errors for and , in Example 4.
| x | Method [22] | This Method | Method [22] | This Method |
|---|---|---|---|---|
| 0 | 0 | 0 | ||
| 0.1 | ||||
| 0.2 | ||||
| 0.3 | 0 | |||
| 0.4 | 0 | |||
| 0.5 | 0 | |||
| 0.6 | 0 | 0 | ||
| 0.7 | 0 | |||
| 0.8 | 0 | |||
| 0.9 | 0 | |||
| 1 | 0 |
Table 3.
Absolute errors for and , in Example 5.
| Method [51] | This Method | |
|---|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Toma, A.; Dragoi, F.; Postavaru, O. Enhancing the Accuracy of Solving Riccati Fractional Differential Equations. Fractal Fract. 2022, 6, 275. https://0-doi-org.brum.beds.ac.uk/10.3390/fractalfract6050275
AMA Style
Toma A, Dragoi F, Postavaru O. Enhancing the Accuracy of Solving Riccati Fractional Differential Equations. Fractal and Fractional. 2022; 6(5):275. https://0-doi-org.brum.beds.ac.uk/10.3390/fractalfract6050275
Chicago/Turabian StyleToma, Antonela, Flavius Dragoi, and Octavian Postavaru. 2022. "Enhancing the Accuracy of Solving Riccati Fractional Differential Equations" Fractal and Fractional 6, no. 5: 275. https://0-doi-org.brum.beds.ac.uk/10.3390/fractalfract6050275