Developing and Researching a Robotic Arm for Public Service and Industry to Highlight and Mitigate Its Inherent Technical Vulnerabilities †




Abstract
:1. Introduction
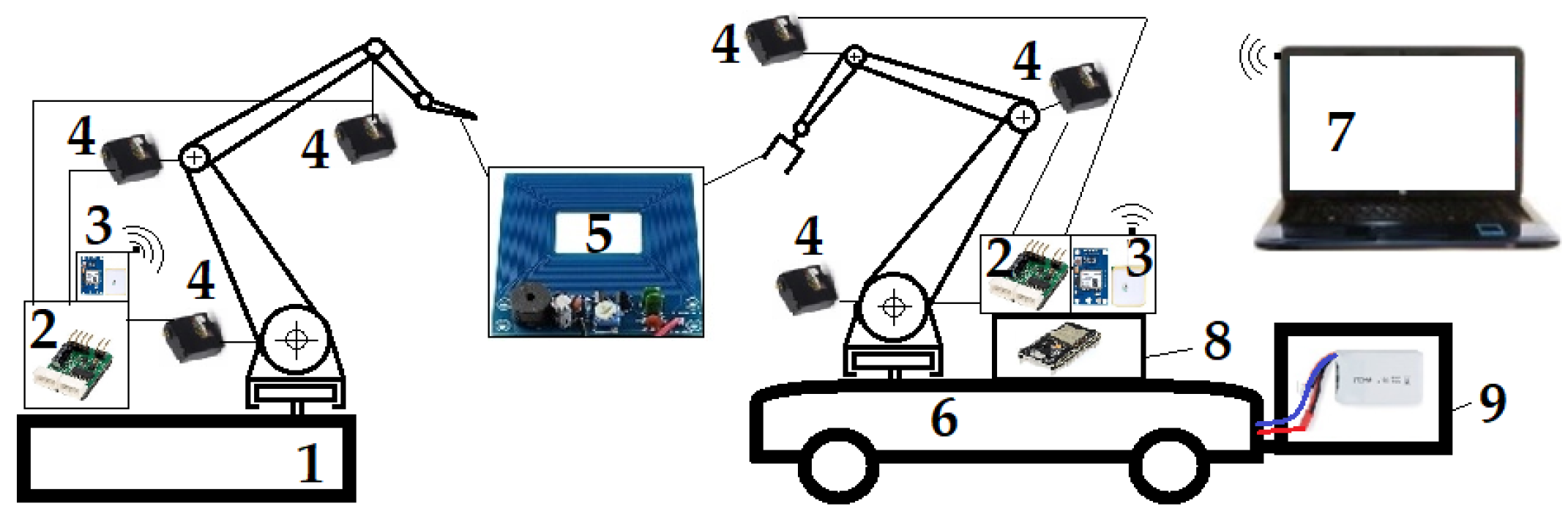
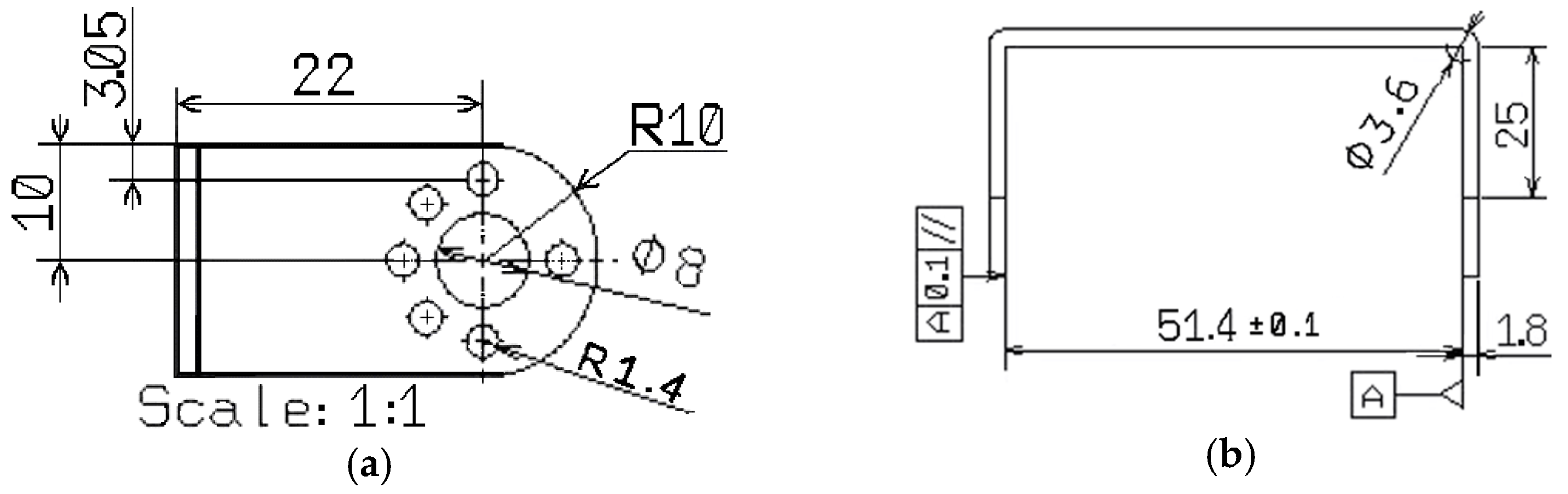
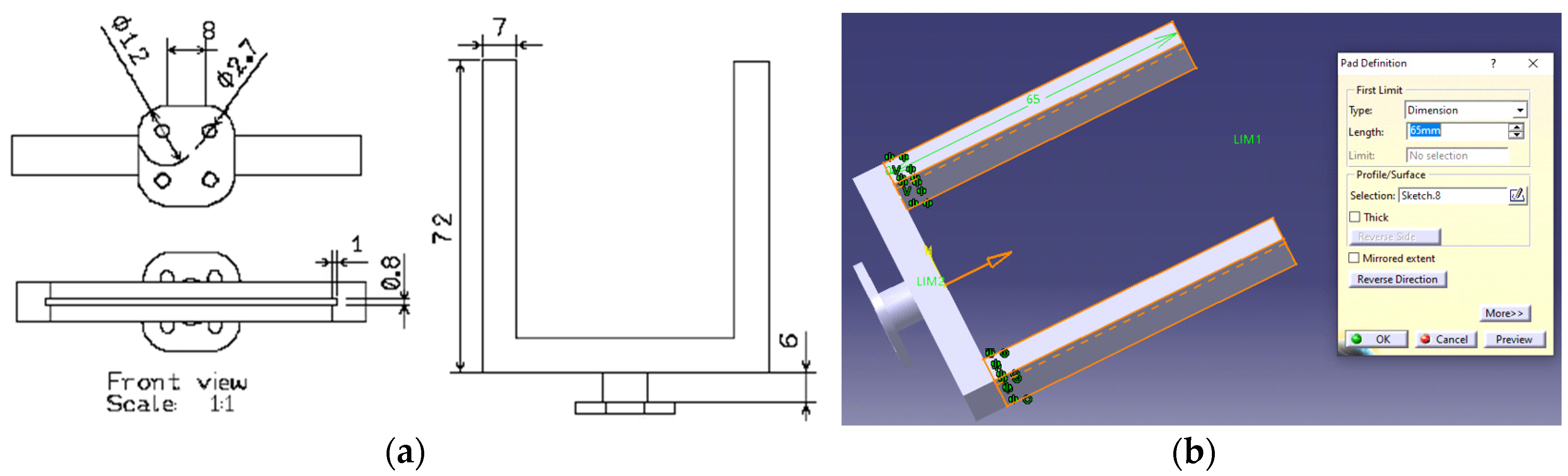
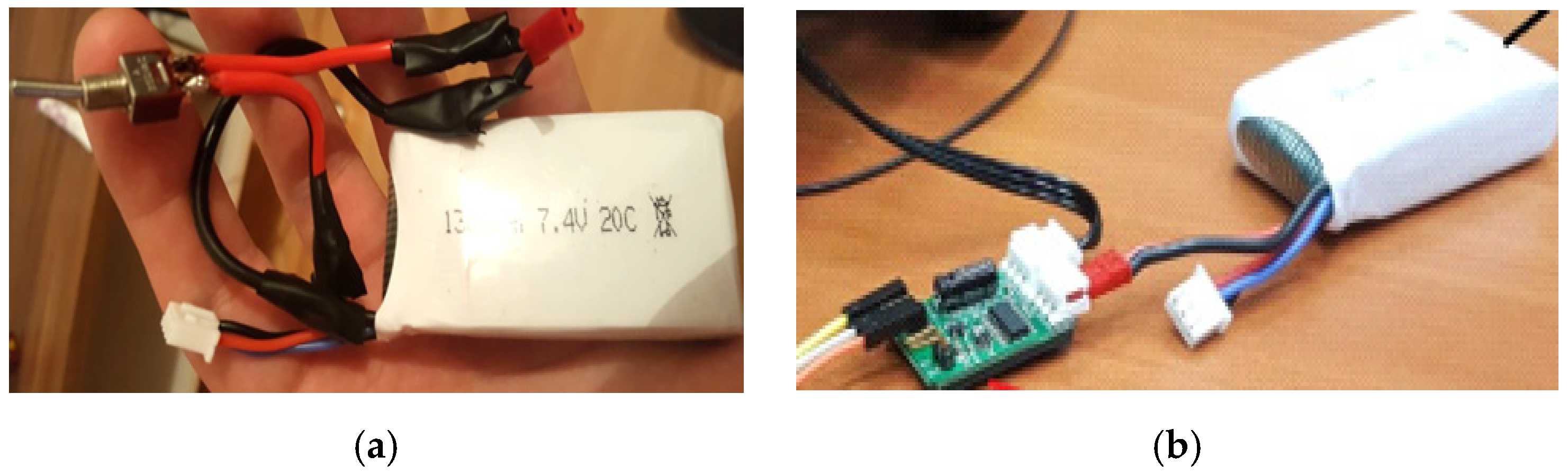
2. Materials and Methods
3. Development and Results
4. Discussions and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Aboulissane, B.; El Haiek, D.; El Bakkali, L.; El Bahaoui, J. On the Workspace Optimization of Parallel Robots Based on CAD Approach. In Proceedings of the 12th International Conference Interdisciplinarity in Engineering (INTER-ENG 2018), Targu Mures, Romania, 4–5 October 2018; Moldovan, L., Gligor, A., Eds.; Elsevier: Amsterdam, The Netherlands, 2019; Volume 32, pp. 1085–1092. [Google Scholar]
- Alejo, D.; Mier, G.; Marques, C.; Caballero, F.; Merino, L.; Alvito, P. SIAR: A Ground Robot Solution for Semi-autonomous Inspection of Visitable Sewers. In Advances in Robotics Research: From Lab to Market; Grau, A., Morel, Y., Puig-Pey, A., Cecchi, F., Eds.; Tracts in Advanced Robotics; Springer: London, UK, 2019; Volume 132, pp. 275–296. [Google Scholar]
- Andrei, L.; Băldean, D.; Borzan, A.I. Applied Measurements and Instrumentation for Improving Diagnostic Devices and Systems in Metropolitan Polluted Environments with Nitric and Carbon Oxides. In Proceedings of the 6th International Conference on Advancements of Medicine and Health Care through Technology, Cluj-Napoca, Romania, 17–20 October 2018; Vlad, S., Roman, N., Eds.; Springer: London, UK, 2019; Volume 46, pp. 45–49. [Google Scholar]
- Bar-Cohen, Y. Biomimetics: Biologically Inspired Technologies; Taylor & Francis: New York, NY, USA, 2006. [Google Scholar]
- Băldean, D.L.; Covaciu, F. Developing the communication of autonomous vehicles controlled with the aid of artificial intelligence for person and capital safety. Saf. Person Constr. Soc. Cap. 2020, 1, 478–484. [Google Scholar]
- Băldean, D.L.; Covaciu, F.A. Robotic Art in Creation and Development of Innovative Shapes and Programs for Automated Driven Cars with Artificial Intelligence. J. Soc. Media Inq. 2020, 2, 22–39. [Google Scholar] [CrossRef]
- Bec, P.; Borzan, A.I.; Frunză, M.; Băldean, D.L.; Berindei, I. Study of Vulnerabilities in Designing and Using Automated Vehicles based on SWOT method for Chevrolet Camaro. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Oradea, Romania, 28–29 May 2020; Grebeni, G., Roman, N., Eds.; IOP Publishing: Bristol, UK, 2020. [Google Scholar] [CrossRef]
- Borzan, A.I.; Băldean, D.L. The Development of a New Interface for Intelligent Control of Energy Supply in Dynamic Environment with Process Digitization. In Proceedings of the 13th International Conference Interdisciplinarity in Engineering (INTER-ENG 2019), Targu Mures, Romania, 3–4 October 2019; Procedia Manufacturing. Moldovan, L., Gligor, A., Eds.; Elsevier: Amsterdam, The Netherlands, 2020; Volume 46, pp. 1–6. [Google Scholar]
- Gao, Z.; Wanyama, T.; Singh, I.; Gadhrri, A.; Schmidt, R. From Industry 4.0 to Robotics 4.0-A Conceptual Framework for Collaborative and Intelligent Robotic Systems. Procedia Manuf. 2020, 46, 591–599. [Google Scholar] [CrossRef]
- Kadir, W.M.H.W.; Samin, R.E.; Ibrahim, B.S.K. Internet Controlled Robotic Arm. Procedia Eng. 2012, 41, 1065–1071. [Google Scholar] [CrossRef]
- Kobayashi, Y.; Harada, K.; Takagi, K. Automatic controller generation based on dependency network of multi-modal sensor variables for musculo skeletal robotic arm. In Robotics and Autonomous Systems; Elsevier: Amsterdam, The Netherlands, 2019; Volume 118, pp. 55–65. [Google Scholar] [CrossRef]
- Mrozik, D.; Mikolajczyk, T.; Moldovan, L.; Pimenov, D.Y. Unconventional Drive System of a 3D Printed Wheeled Mobile Robot. In Proceedings of the 13th International Conference Interdisciplinarity in Engineering (INTER-ENG 2019), Targu Mures, Romania, 3–4 October 2019; Procedia Manufacturing. Moldovan, L., Gligor, A., Eds.; Elsevier: Amsterdam, The Netherlands, 2020; Volume 46, pp. 509–516. [Google Scholar]
- Oltean, S.E. Mobile Robot Platform with Arduino Uno and Raspberry Pi for Autonomous Navigation. In Proceedings of the 12th International Conference Interdisciplinarity in Engineering (INTER-ENG 2018), Targu Mures, Romania, 4–5 October 2018; Procedia Manufacturing. Moldovan, L., Gligor, A., Eds.; Elsevier: Amsterdam, The Netherlands, 2019; Volume 32, pp. 572–577. [Google Scholar]
- Syreyshchikova, N.V.; Pimenov, D.Y.; Mikolajczyk, T.; Moldovan, L. Automation of Production Activities of an Industrial Enterprise based on the ERP System. In Proceedings of the 13th International Conference Interdisciplinarity in Engineering (INTER-ENG 2019), Targu Mures, Romania, 3–4 October 2019; Procedia Manufacturing. Moldovan, L., Gligor, A., Eds.; Elsevier: Amsterdam, The Netherlands, 2020; Volume 46, pp. 525–532. [Google Scholar]
- Shah, R.; Pandey, A.B. Concept for Automated Sorting Robotic Arm. In Proceedings of the 2nd International Conference on Materials Manufacturing and Design Engineering, Tg. Mures, Romania, 4–5 October 2018; Procedia Manufacturing. Elsevier: Amsterdam, The Netherlands, 2018; Volume 20, pp. 400–405. [Google Scholar]
- Tokody, D.; Ady, L.; Hudasi, L.F.; Varga, P.J.; Hell, P. Collaborative Robotics Research: Subiko Project. In Proceedings of the 13th International Conference Interdisciplinarity in Engineering (INTER-ENG 2018), Targu Mures, Romania, 3–4 October 2019; Procedia Manufacturing. Moldovan, L., Gligor, A., Eds.; Elsevier: Amsterdam, The Netherlands, 2020; Volume 46, pp. 467–474. [Google Scholar]
- Industrial Robot. Available online: https://en.wikipedia.org/wiki/Industrial_robot (accessed on 16 June 2020).
- Mechanical Arm. Available online: https://en.wikipedia.org/wiki/Mechanical_arm (accessed on 16 June 2020).
- Robotic Arm. Available online: https://en.wikipedia.org/wiki/Robotic_arm (accessed on 16 June 2020).
- Autonomous Robot. Available online: https://en.wikipedia.org/wiki/Autonomous_robot (accessed on 8 June 2020).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transmitter | Receiver | Observations |
|---|---|---|
| ESP 3.3V | GPS VCC | NEO-6M U-Blox chip |
| ESP GND | GPS GND | -----||----- |
| ESP RX | GPS TX | -----||----- |
| ESP TX | GPS RX | -----||----- |
| Strengths | Weaknesses | Opportunities | Threats |
|---|---|---|---|
| Complete force control | Complex programs | More jobs | Failures and events |
| Selfless intel | No empathy | Escaping arrogance | Hacking |
| Performance in operation | Volatile memory | Rapid connection | Data losses |
| Remote operation | Intercepting incidents | Improving efficiency | Cyber hacks |
| Research Paper | Robot Type | Platform | Transmission |
|---|---|---|---|
| Aboulissane et al. 2019 | Parallel | Mobile | Parallelograms and joints |
| David Alejo et al. 2019 | Six-wheeled | Drivable robotic platform | Mechanical |
| Kadir et al. 2012 | Robotic arm | Static platform | Mechanical |
| Present study | Robotic arm | Mobile platform | Spatial assembly and joints |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Covaciu, F.; Bec, P.; Băldean, D.-L. Developing and Researching a Robotic Arm for Public Service and Industry to Highlight and Mitigate Its Inherent Technical Vulnerabilities. Proceedings 2020, 63, 25. https://0-doi-org.brum.beds.ac.uk/10.3390/proceedings2020063025
Covaciu F, Bec P, Băldean D-L. Developing and Researching a Robotic Arm for Public Service and Industry to Highlight and Mitigate Its Inherent Technical Vulnerabilities. Proceedings. 2020; 63(1):25. https://0-doi-org.brum.beds.ac.uk/10.3390/proceedings2020063025
Chicago/Turabian StyleCovaciu, Florin, Persida Bec, and Doru-Laurean Băldean. 2020. "Developing and Researching a Robotic Arm for Public Service and Industry to Highlight and Mitigate Its Inherent Technical Vulnerabilities" Proceedings 63, no. 1: 25. https://0-doi-org.brum.beds.ac.uk/10.3390/proceedings2020063025