Designing an Artificial Intelligence Control Program Model to be Tested and Implemented in Virtual Reality for Automated Chevrolet Camaro †


Abstract
:1. Introduction
2. Materials and Methods
3. Investigation and Results
3.1. List of Smart Robotic Automotive Applications and a Technological Investigation
3.1.1. Smart Car versus Robotic Vehicle
- Genuine smart features on-board implemented by manufacturer
- Old vehicle with up-graded smart technologies
- Context-aware computing inside car
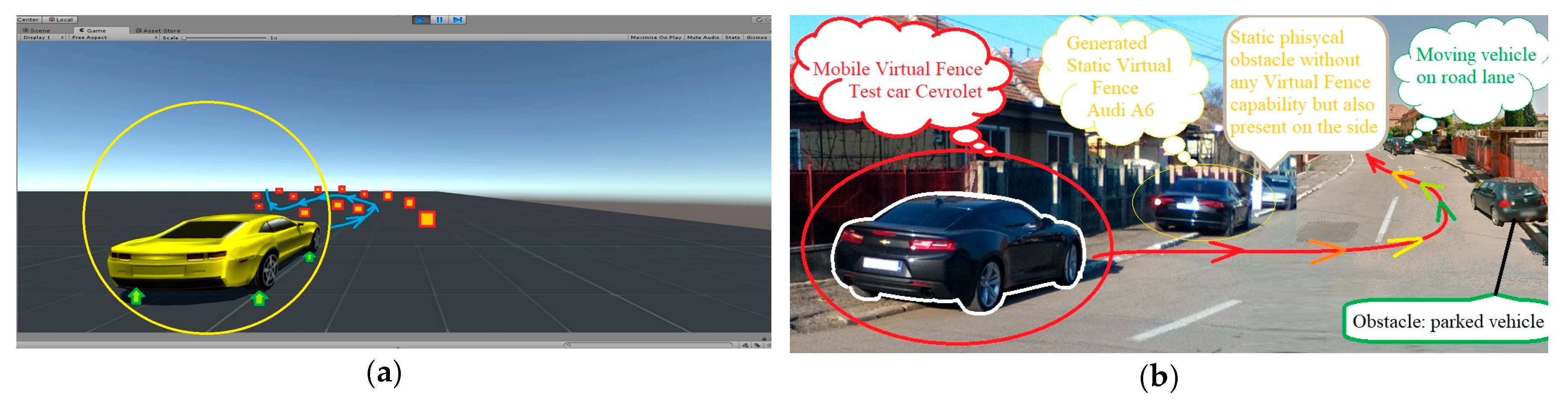
- Mobile virtual fences
- Mutual awareness mechanism
- Research or prototype smart cars
- Apple self-driving vehicles
- Connected car with autopilot
- Tesla autopilot
- Volvo’s autonomous concept vehicle
- Waymo self-driving autonomous cars
3.1.2. Investigating the Integration of Innovative Technologies
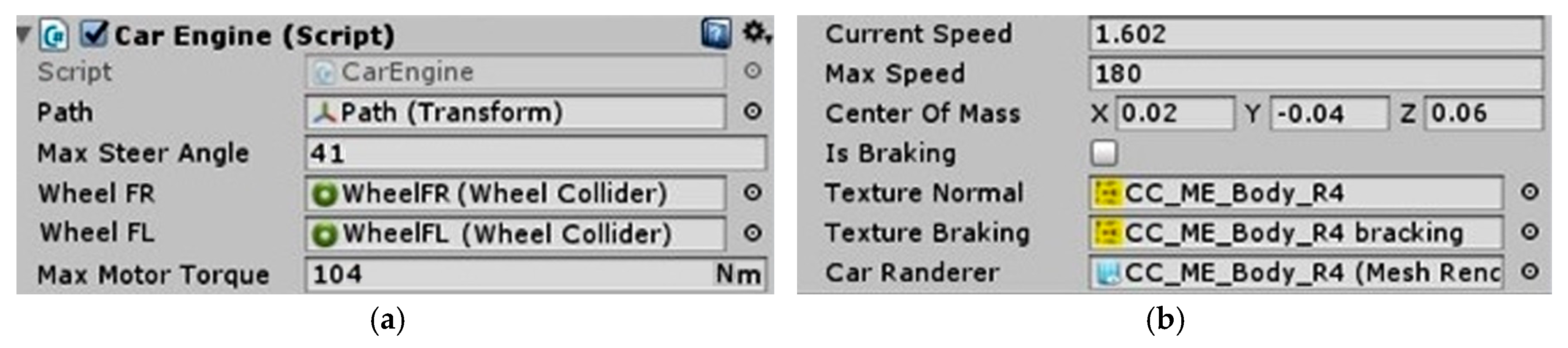
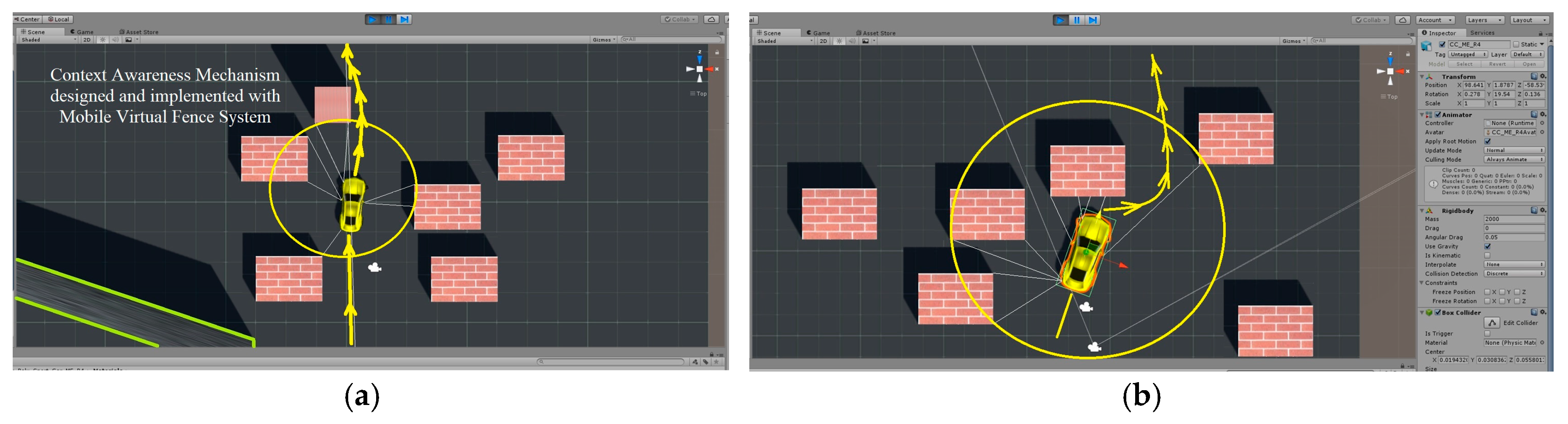
3.2. Virtual Reality Modelling and Design Results
3.3. Programming Artificial Intelligence with Bayes Theorems
4. Discussion and Comparative Relation with Other Contributions in the Field
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bec, P.; Borzan, A.I.; Frunză, M.; Băldean, D.L.; Berindei, I. Study of Vulnerabilities in Designing and Using Automated Vehicles based on SWOT method for Chevrolet Camaro. In The IOP Conference Series: Materials Science and Engineering, Proceedings of the Annual Session of Scientific Papers “IMT ORADEA 2020”, Oradea, Romania, 28–29 May 2020; Grebenisan, G., Ed.; IOP Publishing: Philadelphia, PA, USA, 2020; pp. 1–6. [Google Scholar]
- Covaciu, F.A.; Băldean, D. Contribution to Research the Applied Engineering Protocol to Implement a Fuzzy Regulator for Autonomous Driving of an Automotive Model Implemented in Virtual Reality. In Proceedings of the SMAT 2019, the 30th SIAR International Congress of Automotive and Transport Engineering, Craiova, Romania, 23 October 2019; Dumitru, I., Covaciu, D., Racila, L., Rosca, A., Eds.; Springer: Cham, Switzerland; Basel, Switzerland, 2020; pp. 468–476. [Google Scholar]
- Covaciu, F.A. Developing the communication of autonomous vehicles controlled with the aid of artificial intelligence for person and capital safety. In Safety of the Person and Building the Social Capital, 1st ed.; Nechita Iancu, E.A., Ed.; Universul Juridic: Arad, Romania, 2020; Volume 1, pp. 478–484. [Google Scholar]
- Ferenti, I.; Băldean, D.L. Artificial intelligence implemented in rally vehicles for increasing energetic efficiency in competitions. Stiinta si Inginerie 2018, 34, 1–10. [Google Scholar]
- Hyun, E.Y.; Hwang, G.; Lee, M.; Choi, Y.G.; Cho, S.; Jeon, B. Topological Sequence Recognition Mechanism of Dynamic Connected Cars using the Connected Mobile Virtual Fence (CMVF) System for the Connected Car Technology. Appl. Sci. 2020, 10, 4347. [Google Scholar]
- Jovrea, S.; Borzan, A.I.; Băldean, D.L. Researching on-board display of essential information concerning technical conditions in operation and fuel-economy of a motor-vehicle in operation. Stiinta si Inginerie 2017, 31, 1–10. Available online: http://stiintasiinginerie.ro/31-67 (accessed on 1 December 2020).
- Mitroi, M.F.; Chiru, A. Aspects Regarding the Identification of Optimum Driver Comfort Level by Virtual Analysis of the Vertical Oscillations Generated by Road. In Proceedings of the SMAT 2019, the 30th SIAR International Congress of Automotive and Transport Engineering, Craiova, Romania, 23 October 2019; Dumitru, I., Covaciu, D., Racila, L., Rosca, A., Eds.; Springer: Cham, Switzerland; Basel, Switzerland, 2020; pp. 221–230. [Google Scholar]
- Moldovan, A.; Borzan, A.I.; Băldean, D.L. Experimental research of the management system from the Peugeot 4007 Sport Utility Vehicle. Stiinta si Inginerie 2017, 31, 1–10. [Google Scholar]
- NHTSA, Federal Motor Vehicle Safety Standards, V2V Communications. 2017. Available online: https://www.federalregister.gov/documents/2017/01/12/2016-31059/federal-motor-vehicle-safety-standards-v2v-communications (accessed on 1 December 2020).
- Ollero, A.; Simon, A.; Garcia, F.; Torres, V.E. Integrated mechanical design and modelling of a new mobile robot. In IFAC Intelligent Components and Instruments for Control Apps; Elsevier: Amsterdam, The Netherlands, 1992; pp. 461–466. [Google Scholar]
- Pappalardo, C.M.; Lombardi, N.; Dašić, P.V.; Guida, D. Design and development of a virtual model of an electric vehicle of category L7. In The IOP Conference Series: Materials Science and Engineering, Proceedings of the Annual Session of Scientific Papers “IMT Oradea 2019”, Oradea, Romania, 30–31 May 2019; Grebenisan, G., Ed.; IOP Publishing: Philadelphia, PA, USA, 2019; pp. 1–6. [Google Scholar]
- Park, C.; Chung, S.; Lee, H. Vehicle-in-the-Loop in Global Coordinates for Advanced Driver Assistance System. Appl. Sci. 2020, 10, 2645. [Google Scholar] [CrossRef]
- SAE J2735, Dedicated Short Range Communications (DSRC) Message Set Dictionary; SAE Internat: Troy, MI, USA, 2016.
- Thrun, S. Toward Robotic Cars. Commun. ACM 2010, 53, 99–106. [Google Scholar] [CrossRef]
- RNMCA. Air Quality. Air Quality Assessment. Available online: http://www.calitateaer.ro/public/assessment-page/ (accessed on 5 June 2020).
- Baldean, D.; Andrei, L.; Borzan, A.I. Research of NOx and PM10 pollutants in Cluj-Napoca with the mobile system for mitigating public health risks. In IOP Conference Series: Materials Science and Engineering; Grebenisan, G., Ed.; IOP Publishing: Philadelphia, PA, USA, 2020; Volume 898, p. 012003. [Google Scholar]
- Baldean, D.; Andrei, L.; I Borzan, A. Investigation of NOx emissions for mitigating public health risk with Mercedes E Coupe. In IOP Conference Series: Materials Science and Engineering; Grebenișan, G., Ed.; IOP Publishing: Philadelphia, PA, USA, 2020; Volume 898, p. 012006. [Google Scholar]
- Self-Driving Car. Available online: https://en.wikipedia.org/wiki/Self-driving_car (accessed on 5 June 2020).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Basic system | Value 1 | Value 2 |
|---|---|---|
| Propulsion | V6 engine | 335 HP |
| Wheels | 245/45R20 (front axle) | 275/35R20 (rear axle) |
| Transmission | automatic | 8L45 1 |
| 1 Strength | 2 Weakness | 3 Opportunity | 4 Threat |
|---|---|---|---|
| Stored knowledge | Complexity | More creativity | Digital blockage |
| Self-driving | Limited sensing | Context aware study | Inadequate response |
| Internet of things | Easy interception | Connected car service 1 | Lack of privacy |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andrei, L.; Baldean, D.-L.; Borzan, A.-I. Designing an Artificial Intelligence Control Program Model to be Tested and Implemented in Virtual Reality for Automated Chevrolet Camaro. Proceedings 2020, 63, 44. https://0-doi-org.brum.beds.ac.uk/10.3390/proceedings2020063044
Andrei L, Baldean D-L, Borzan A-I. Designing an Artificial Intelligence Control Program Model to be Tested and Implemented in Virtual Reality for Automated Chevrolet Camaro. Proceedings. 2020; 63(1):44. https://0-doi-org.brum.beds.ac.uk/10.3390/proceedings2020063044
Chicago/Turabian StyleAndrei, Lavinia, Doru-Laurean Baldean, and Adela-Ioana Borzan. 2020. "Designing an Artificial Intelligence Control Program Model to be Tested and Implemented in Virtual Reality for Automated Chevrolet Camaro" Proceedings 63, no. 1: 44. https://0-doi-org.brum.beds.ac.uk/10.3390/proceedings2020063044