
See Me, Feel Me, Touch Me, Heal Me: A Contextual Overview of Conductive Polymer Composites as Synthetic Human Skin


Department of Chemistry and Biochemistry, California Polytechnic State University, San Luis Obispo, CA 93407, USA
*
Author to whom correspondence should be addressed.
J. Compos. Sci. 2022, 6(5), 141; https://0-doi-org.brum.beds.ac.uk/10.3390/jcs6050141
Submission received: 22 March 2022
/
Revised: 2 May 2022
/
Accepted: 11 May 2022
/
Published: 12 May 2022
(This article belongs to the Special Issue Advanced Conductive Polymer Composites)
{kind=link}
{kind=link}
Abstract
:The fields of polymer science, conductive composites, materials engineering, robotics, and human perception intersect at the development and application of synthetic human skin. To be accepted by human users, artificial human skin must meet several requirement benchmarks. Synthetic human skin must look realistic, but not be eerie or creepy, upsetting those using or interacting with the material. Synthetic skin must feel like human skin, including mechanical response, thermal conductivity, and tactile properties. Realistic synthetic human skin must be electrically conductive, so that the user may experience accurate sensations of touch and feel. Finally, synthetic human skin should possess some degree of self-healing behavior. This review provides a brief description of advances in these disparate aspects of synthetic skin science, from the perspective of a practicing conductive polymer composite scientist and engineer.
1. Introduction
We exist at the forefront of a technological revolution. As an evolving species we have learned to harness and exploit the properties of materials around us, from fire and sharp sticks, to hammers, writing utensils, and eventually to widespread use of complex machines that enabled the Industrial Revolution. These tools were designed to function in ways that advanced the reaches of our own natural traits to extend beyond the capability of what we as humans can do with our own hands. This century poses a different approach to material, device, and tool design: instead of looking to the future to create what has never been seen or imagined by the mind, scientists and engineers are looking to natural models that already exist and are instead seeking ways to imitate those systems in engineered materials and devices. In this paper, we assess the state-of-the-art of conductive polymer composites used in artificial skin applications. Further, we provide a model (The Five Finger Rule) for addressing key aspects of artificial skin that must be addressed to gain acceptance and functional usability in real world applications.
Biomimicry is a scientific means of synthetic creation intended to copy or mimic a design that already exists in nature. This practice is prevalent in architectural, medical, and technological fields of creation. Synthetic polymer materials, which were once a means of leaving natural materials behind, are now studied for their biologically imitative potential as well as their functional properties that closely resemble naturally occurring polymeric materials. These applications extend to biomedical tools and devices, drug delivery systems, soft robotics, and antibacterial surfaces. The advantage of polymer materials is that their properties may be controlled by artful use of synthetic methods and manufacturing conditions. Many natural materials possess qualities that are beneficial for use, yet they come with additional properties that may hinder the suitability of that material for a specific intended use. Synthetic polymers can possess qualities that are desired for a specific function while also containing design alterations so that the materials does not display any of the unwanted features of its natural analog.
The state-of-the-art of synthetic materials has reached a point where overlap with biomimicry is now necessary for certain applications. Materials used for pseudo-anatomy applications face a manufacturing hurdle in their inability to closely resemble what they aim to imitate. For example, prosthetic limbs have a non-human visual characteristic to them because their design has historically prioritized mechanical function over visual subtlety. With modern polymeric material and composite advances, the improvement of prosthetic function does not necessarily demand a lack of improvement in prosthetic visual imitation. For some features, visual imitation could potentially improve function.
The conductive properties of polymeric composite artificial skin material are helpful in developing soft robotics and animatronic covers or wrappings, among other applications. Tactile and mechanical properties contribute to skin imitation for up-close observation and instances where the skin comes in direct contact with those that possess a fully functioning sense of touch, this primarily being humans that are physically interacting with the material. Differing tactile and mechanical properties can be applied to imitate various types of skin and subdermal tissue. This article provides an overview of properties that will contribute to the development of synthetic polymer composite skins and explores technical readiness of such a material. This is no singular hierarchy of desirable or beneficent properties when it comes to synthetic polymer composite skins, as no property takes definitive priority over another in all application areas. Some applications, such as theme park animatronics, do not require tactile properties where visual elements would take ultimate priority. In the case of prosthetics for those with birth defects or permanent destruction from external trauma, an electrically conductive sense of touch may be more beneficial than the material’s visual likeness to real skin. Each system, comprising user and material, will have a hierarchy of material specifications to best fit the situational needs. To better define these priorities, a glimpse into the potential for each property must first be explored, and a benchmark for considering human interaction with synthetic biological analogues, the so-called uncanny valley, must be introduced.
2. The Uncanny Valley
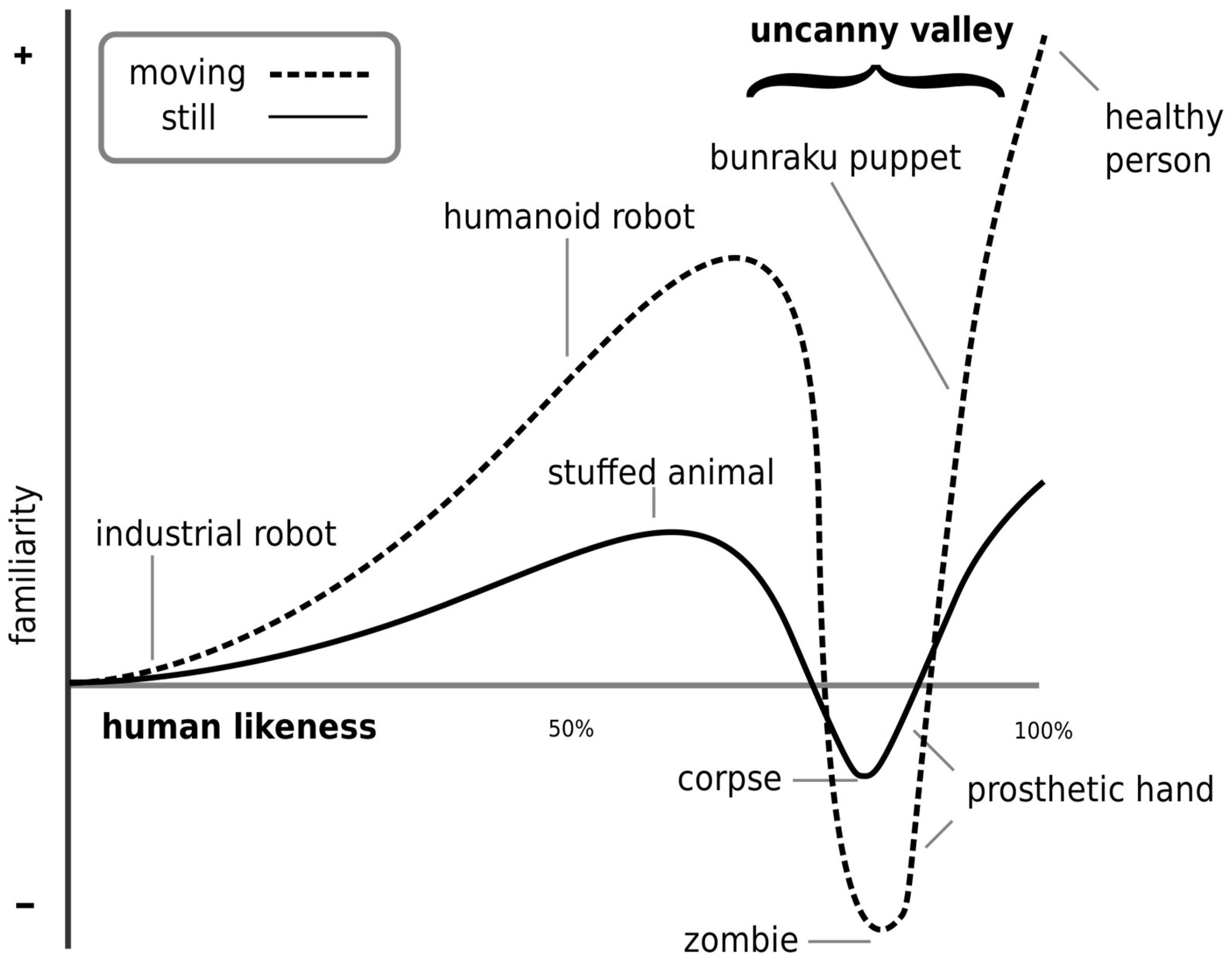
A guiding principle in the design of synthetic biological analogues is that humans would likely tend to have an affinity for those objects that look more like themselves. The number of humanoid features that exist in a synthetic biological analog should directly correlate with overall likability and comfort level with the material or device. However, a discomfort was observed by robotics expert Masahiro Mori in 1970, showing that a degree of humanness leads to distrust and aversion of robots and other representations (i.e., photographs) of humanoid systems. A drastic decline in human affinity or comfort level with a robot occurs at between 50 and 100% human likeness. This decline is mitigated with increasing human likeness before reaching their highest affinity at 100% human likeness. It must be noted that the ideal human likeness is described of that as a healthy, average-looking person with attractive features; this is an arbitrary parameter, as every individual has a different conception of ideal attractiveness, which leads to separate ranking of affinity within different features. The troubled feeling in having affinity for an object with increasing but not perfect human likeness was coined the “uncanny valley” by Mori [1]. One representation of the uncanny valley for both moving and still systems is shown in Figure 1. Notice that while industrial robots exhibit low human likeness, they also impart benign or nominal shifts in baseline familiarity with an observer. Humanoid robots display mutual increases in human likeness and familiarity. Prosthetic hands, however, while showing more human likeness than a humanoid robot, suffer a negative familiarity rating, indicating discomfort or distaste on the part of the viewer. The familiarity rating is worse when the prosthetic hand is moving versus when it is still. The authors of this paper believe that the artificial skin on prosthetic hands is critical to the familiarity rating, and that improving the properties of conductive polymer composites in five key areas will help bring prosthetic hands, and, eventually, other systems where artificial skin is in use, out of the uncanny valley and into acceptable territories of familiarity and comfort.
The uncanny valley phenomenon is widely studied today, although it was initially described as a simple observation rather than an empirically proven trend based on quantifiable data. The requirement for an object to possibly end up in the uncanny valley is that it must have a very humanlike appearance with slight details that are notably non-humanoid in nature. The initial objective of making humanoid objects appear more humanlike is to enhance trust and relations between the object and the observer. In theory, humans relate to what looks more human as a common function of recognition and decision-making; the adage ‘that which looks like me must think like me’ leads to more comfort around the existence of said object. The opposite experience can be observed among different species as well as our own. For example, humans tend to be more likely to interact with animals that have facial features that are more like human faces, such as a cat or a dog, and are less likely to interact with animals that have faces that are less humanlike, such as lizards or bugs. This effect is commonly used artistically to depict a targeted being as unlikable by replacing human features with animalistic ones. Movie studios use this feature to make their villains unlikable, such as adding a snake-like nose to Voldemort’s face in the Harry Potter movies or giving gang members and villains seemingly mutated features to make them half-animal and therefore less human. More solemnly, Nazi Germany used poster propaganda to depict nonwhite races as being lesser individuals by visually comparing humans to monkeys and rats [3]. That which looks less human is inevitably going to invoke a response of aversion, and this psychological response is subliminally manipulated in all forms.
The uncanny valley works in a similar yet unintentional fashion when it comes to “not-human-enough” features invoking viewer discomfort. As visual imitation technologies become more advanced, products become more realistic than ever before. However, the absence of key features in imitative structures will result in such products being qualitatively placed at the lowest point in the uncanny valley due to their realistic yet ultimately unconvincing portrayal. Cinematic examples include the animated holiday film The Polar Express or Zemeckis’ Beowulf, in which facial expressions were too deadpan for the level of detail that existed in the animation [4]. In the world of robotics, Sophia, an advanced artificial intelligence chatbot, has an eerie presence according to some users. The mannerisms of the imitative response system combined with a minimalistic range of voice inflections or facial expressions gives those who interview it an obvious level of discomfort [5]. While visual features of the face are well designed at any moment of static observation, the off-putting nature of the interaction by the robot is the perfect blend of human likeness and robotic “otherness” to place Sophia in the uncanny valley. Making realistic features near-perfect is a risk of design, especially when initial viewing of an object is lifelike, but movement, interaction, and non-static features reduce the imitative properties of the system.
Some criticism of this phenomenon has fallen on the observer. In an interview, Mori warns that his description of the uncanny valley might be more of an uncanny cliff, where an object such as a robot, animated film character, or prosthetic body part will invoke discomfort after a certain degree of realism, no matter how closely it imitates its target image [1]. This is counteracted with the idea that the uncanny valley is different for varying generations with younger demographics having more exposure to non-living moving objects and thus more familiarity. It is possible that this is due to expectations of what is considered realistically lifelike in a nonliving imitator as opposed to an idea derived from fantasy and limited by technology. Those who have grown up in the age of modern technology are more understanding of what is possible and what will soon become possible. This allows them to create a more accurate prediction of what to expect from technology and thus what the boundaries of lifelike imitation are, ultimately resulting in a more benign or accepting response to images and objects that lack 100% humanlike features.
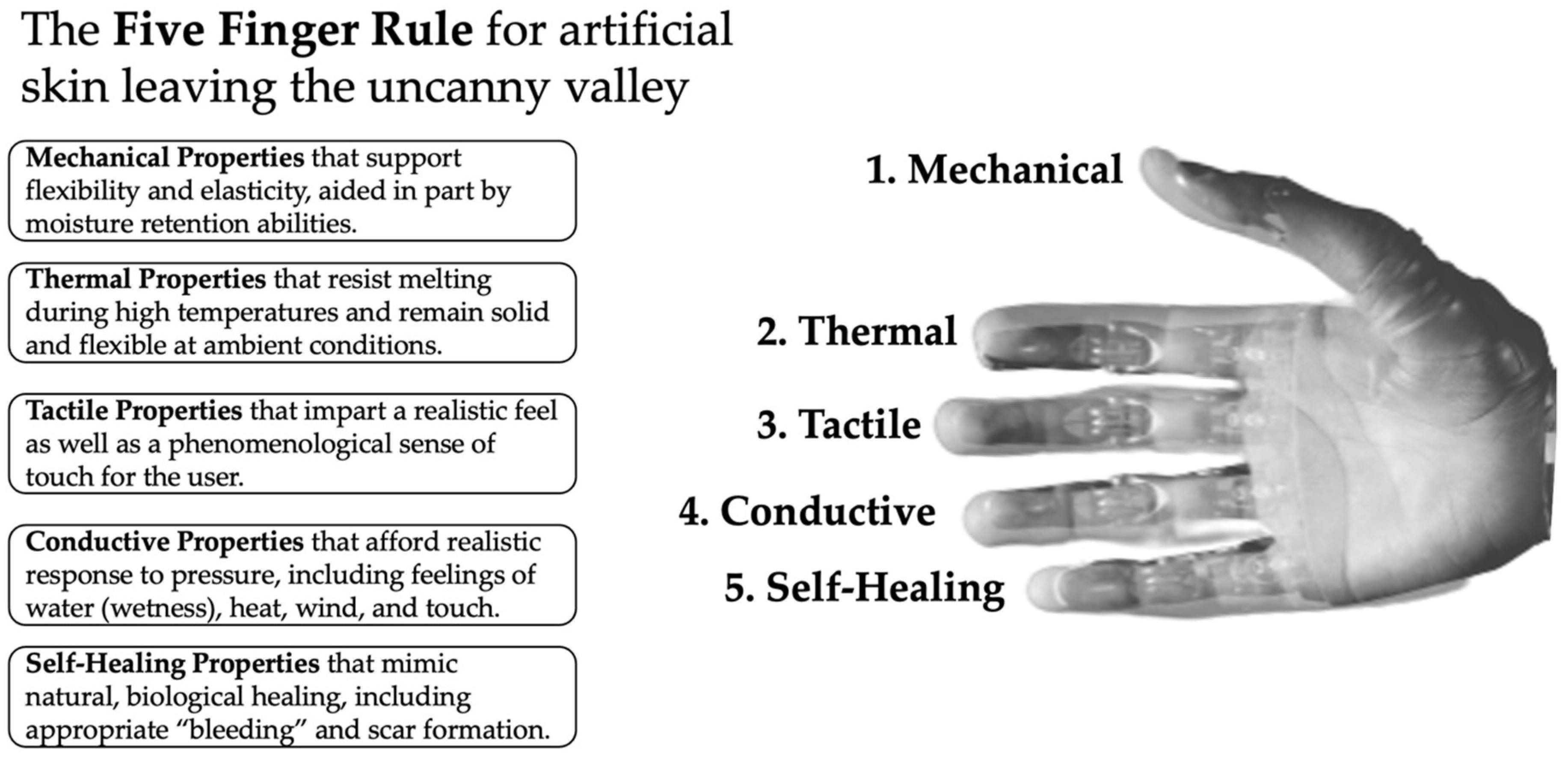
In the material world, further development is now a greater risk. While progress is always encouraged, there is a boundary that exists where further contribution of a singular attribute without the advancement of others will lead to becoming trapped in the uncanny valley pit of low user affinity. However, there is potential in these applications for the use of synthetic polymer composite skins which will overall advance the development of biomimetic materials. The proper design of conductive polymer composite artificial skin will make contributions possible in the areas of mechanical and thermal properties, tactile and conductive properties, and self-healing properties, all the while helping new material systems to advance out of the uncanny valley’s pit of low user affinity. We call this framework the Five Finger Rule for artificial skin leaving the uncanny valley, the key principles of which are shown graphically in Figure 2 and will be expounded on in the rest of this paper.
3. Mechanical and Thermal Properties
One of the most necessary properties of a synthetic skin is its moisture retention. Skin has the unique feature of a certain amount of elasticity; however, it is still incredibly durable and retains a moisture content that contributes to elasticity without becoming water-logged. The molecular structure of skin consists of cells with a lipid bilayer that enable this level of moisture permeability. One instance of polymeric advancement is the creation of a tubular liposome which acts as a synthetic imitation of fatty acids that make up this lipid bilayer [7]. Usually, liposomes are present in a circular conformation; however, in one synthesis a long chain α-hydroxy stearic acid was created that exhibits natural-like coagulation properties using a ceramide composition, resulting in macrofibres capable of forming a matrix layer. This has the potential to enable a permeable membrane within the polymer that can enable moisture diffusion throughout the polymer if the bilayer segments are able to act as a film surrounding selective portions of the polymer skin composite. Moisture content can be controlled this way if combined with a hydrogel to retain moisture, giving the synthetic conductive polymer composite skin material a soft-to-touch feel as opposed to one that is rubbery.
Another important mechanical property is the flexibility of the synthetic conductive polymer composite skin. Human bodies benefit greatly from the flexibility that our natural skins provide, and this should be properly imitated in synthetic skins as well. Flexibility of skins leads to better mobility the underlying structure that the skin encases (e.g., bones and joints, robotic structures, etc.), a better degree of durability and resistance to puncturing, and protection from external elements without limiting function. A flexible skin was developed by creating a multi-layer skin of thermoplastic polyurethane (TPU) skin comprised of an epidermis TPU film around a TPU foam dermal layer [6]. This enables a tougher layer on the outside to improve protection while allowing for greater flexibility in the inner foam layer by enabling additional mechanical freedom via air pockets and a lesser density of material which would otherwise exert a resisting force. This material is further modified by the gas in which it is foamed, allowing for greater bulk density when foamed with nitrogen gas as opposed to carbon dioxide [8]. The material is somewhat close to imitating real skin in flexibility but is a pale, opaque white color. Recent work has reevaluated the suitability of simple polymer systems for the replication of human skin, especially when creating skin simulants to be used in clinical testing involving mechanical failure. Singh et al. recently demonstrated a low-cost, two-part (2K) silicone-based polymer that could be fabricated with varying shore hardness values [9]. The mechanical properties of their artificial skin may be tuned to mimic human skin properties from different locations within the body.
Thermal properties of skin are straightforward. Most synthetic skin materials are designed to be solid yet flexible in open and ambient conditions. Furthermore, melting temperatures of these materials must be well above ambient conditions otherwise the polymer composites risk permanent deformation at the slightest touch. It is recommended that designs for developing synthetic conductive polymer composite skin materials involve a high melting temperature in the case they meet high external heat sources. For example, if a synthetic skin is molded around a prosthetic hand designed for someone who has either lost a hand or lived with a birth defect, it is imperative that the skin has a melting temperature well above 125 °C, otherwise that person could deform their hand on a hot car door or a ceramic cup of freshly brewed coffee. If possible, a thermoset material is preferred for an outer skin so that the material is barely impacted by heat at all. Thermoplastic materials are useful in recyclable materials and in common plastics applications such as water bottles, but not ideal for composite materials designed for biomimetic skins.
4. Tactile and Conductive Properties
Introducing realistic touch to the world of synthetic skin is a grand challenge within the field. The daring part about this developmental area is the push to make the sense of touch a so-called two-way street between the artificial skin user and the living object that the artificial skin user is in contact with. Meeting this challenge involves conductive polymer composite technologies as well as sensor technologies being incorporation into the materials to enable a transmittable feeling of touch.
Touch as a physical sense is an electrical pulse conducted through the nervous system. This is best imitated in synthetic conductive polymer composite materials by incorporating sensors into polymer matrices that can act as a pseudo-nervous system by passing an electrical signal when pressure is changed, or some other type of pulse is detected. Park et al. developed a tactile sensor matrix in 2019 consisting of molybdenum disulfide, which is capable of detecting pressure and modulus differences and quantifying that data [10]. At the same time, Fu et al. focused efforts on adding sensors to durable hydrogels made of polyacrylonitrile-poly(vinylidene fluoride) to create an artificial skin that can sense gentle touch and pressure [11]. This signals the advancement of haptic technology development as a common technology. Other stretchable conductive polymeric hydrogel composites are already in development for haptic sensing, and strain sensors are being incorporated into thin-film polymer skins that enable wearers to feel pulse patterns that could imitate feelings of water, wind, touch, and other possibilities [12,13]. These conductive polymer composite material technologies mark the beginning of advancing virtual reality technology beyond the realm of sight and sound and into total body-feel immersion. Soon, haptic gaming suits will be an accessible household item, and it is very likely that these matrix sensors embedded within a polymer composite will be the main technology used in the skin of the suit.
Sensors can also be applied to the medical field for health monitoring and personal use. Gao et al. developed a thin polymer skin containing biofuel cells that are powered by chemical reaction with lactate, a natural byproduct of the human metabolic cycle, to send a Bluetooth signal to an external monitor that can accumulate data regarding pulse rate and blood pressure [14]. For people with missing or damaged appendages, skins with these tactile properties are being incorporated into prosthetic limbs to enable a sense of touch to be transmitted to the user [15]. This is achieved with a multilayer construct in which the sensors exist on the outer regions of the skin while a circuit system exists underneath to transport the signal. There is also an interface which enables these signals to be introduced to the user’s nervous system and allow a feeling of touch with the addition of a fake hand or foot. Initially this application was designed to prevent polymer destruction by accidental exposure to heat for too long. Prosthetic limbs lacked the sense of touch that people use to avoid damaging their body by removing their hand from a heat source before it is burned beyond healing ability. Thus, anyone that had a limb they could not feel were risking unnecessary and expensive damage. At Johns Hopkins University, where this skin is being developed, it was modified further to sense gentle touch and pain as the main receptors [16]. While pain is not necessarily an enjoyable sense, it enables natural reactive measures to notify the brain that something in the body is in danger or is otherwise malfunctioning. These sensors also work with the brain to enable mind-control of the appendage when attached so that the hand can move naturally without additional physical effort on the user’s behalf. This technology paves the way for a possibly science fiction-like era of developing technology. In a less ethical world, this would possibly lead to additional appendage attachment to an unnecessary degree. Unsubtle body enhancements could be taken to extreme measures with the addition of robotic properties to increase speed or strength within the body for sports or warfare. Those with financial resources could invest in a tail or wings if they so pleased. Older humans could return to their youth by switching out parts of their body that begin to expire. However, for now, pain-sensing prosthetic limbs for general bodily defects represents the frontier of these technologies.
Other approaches to imparting tactile and conductive properties involve the development of ionic polymer metal nanocomposites for creating soft polymer actuator skin. Panwar et al. recently presented a soft polymer actuator skin that exhibited stable actuation and self-sensing voltage using various electrolytes at room temperature [17]. Their terpolymer ionic polymer nanocomposite based on vinylidene fluoride, trifluoroethylene, and chlorotrifluoroethlyene consisted of many pores that enhanced water and electrolyte absorption and lowered the overall Young’s modulus of the material while maintaining high tensile strain. Yi et al. recently demonstrated advances in conductive as well as mechanical behavior in their piezo-resistive polyacrylamide hydrogel composite containing ultrahigh molecular weight polyethylene as a fibrous reinforcement filler [18]. Their artificial skin exhibited suitable relative change in resistance during human movements like breathing, frowning, finger bending, and elbow bending. Choi et al. used a bilayer polymer structure with different elastic moduli to create a biomimetic tactile sensor for use in artificial skin and robotic fingers. Their so-called surface kinetic interface (SKIN) materials, using combinations of PDMS and PET, could detect surface structures under 100 μm with only 20-μm height differences [19]. For more on the bio-interfacing of electronics using conductive polymers, we direct the interested reader to a recent review by Lee et al. [20].
Will synthetic conductive polymer composite skin ever really feel like real skin? This is not so much a concern for industries such as amusement parks and museums where the animatronics are not meant to be touched by visitors. However, for biomedical purposes such as prosthetic appendages, an external sense of touch allows the user and the user’s physical interlopers to feel more comfortable with their synthetic parts and their overall physical-social engagement. However, perhaps the more lucrative industry needing synthetic skin that feels realistic to the touch has to do with pleasure. Medical purposes for prosthetic limbs focus more on low-cost function of mechanical properties to enable some ability for daily life activities, and thus surface imitative properties are not always prioritized. However, the sex industry needs to enable maximum tactile biomimicry for products to sell. In both past and current products, synthetic skins are mostly made of silicone or thermoplastic elastomers, or TPE [21]. A silicone skin for prosthetic hands is not as much of a concern as they are somewhat adhesive and allow for better grip. TPE is a more realistic synthetic polymer analog for skin as it is softer and more flexible, but as a thermoplastic with a low melting temperature it is not suitable for warm environments. Hanson Robotics has developed and patented a new material known as “frubber” which is soft and elastic and imitative of skin more than any other existing material. However, frubber is best imitative of dermal areas such as the face or arms as opposed to genitalia [21]. To some, the realism of skins in sex toys and dolls is a progressive development. The feeling of what could be—in one’s imagination—real skin would make intimate experiences more pleasurable for the user. What must be considered though is the application of the skin. In simple sex toys where the genitalia are isolated in the design or continuity of materials being used, too realistic genitalia without the rest of the body matching in appearance and tactile touch gives way to the unwanted pit in the uncanny valley. This could invoke similar reactions to someone who has encountered a cadaver or a severed limb.
Similar issues with the uncanny valley in biomedical products and other developments are also addressed with the evolution of synthetic conductive polymer composite skins. A silicone-molded material described as “faux flesh” was created with a sensory grid under the dermal layer that allows for computerized detection of touch; this was immediately deemed the “Mariana Trench of uncanny valleys” when it was molded as a phone case [22]. The phone case was adapted to make cell phones respond accordingly to different senses of touch; tickling the skin could wake the phone up, stroking the skin could increase the volume, or poking the skin could lock the phone. This elicited a response of disgust as it looks like a blob of skin that slightly melted over the surface of which it was placed. Prosthetic appendages could look the same as a real hand, but mechanical differences in the movement of a real hand as opposed to a prosthetic hand could also cause discomfort to anyone observing or interacting with it.
5. Self-Healing Properties
One important hurdle in the development of synthetic conductive polymer skins is that they risk permanent damage with slight trauma. Natural skin heals when torn or cut as a part of our evolutionary anatomy. Artificial skins struggle with these imparting these same healing properties. Some thermoplastic materials could potentially be heated to reset the design of the skins, but with more intricacies such as conductive sensory matrices entering the space this “heat and heal” approach becomes more complicated and less tractable. Thus, self-healing polymer materials have been explored for self-healing properties and applied accordingly. One method of self-healing is the use of polyacrylic chains crosslinked with poly(ethylene glycol) diacrylate monomers, which reform covalent bonds through disulfide and Diels–Alder chemistry [23]. Usually, self-healing properties are modified with hydrogen bonding efforts that do not contribute to covalent reattachment, making this new work important to the advancement of artificial polymer skins. This material can also be molded into three-dimensional shapes making it ideal for epidermal application. Other strategies for imparting self-healing behavior have employed trans-octahedral metal-ligand coordination for combined self-healing and tactile sensing properties. A novel material reported by Han et al. is based on tolylene 2,4-diisocyanate elastomer (PTD) terminated with 4,4′-Bis (hydroxymethyl)-2,2′-bipyridine (bpy). Incorporation of Zn2+ or Ni2+ ions allow for metal-ligand coordination with the bpy moieties, imparting self-healing and fast recovery behavior [24].
Natural skin also has the mechanism of bleeding when harmed to deliver essential components for healing to the damaged region as well as to signal visually that trauma has occurred. This concept has been replicated in field of polymer composite science by embedding microcapsules containing separate amounts of epoxy and amine initiator that rupture when the polymer skin is damaged [25]. When the components mix, the indicator in the epoxy changes from orange to red to look like blood while the two-component chemical reaction contributes to material repair at the damaged site. It would be uncomfortable to see a prosthetic hand receive a deep cut and not bleed or heal, so the microcapsule bleeding effect would look like a natural function of damage to a user or wearer of this technology. However, one issue with this color-indicating self-healer is that the healing “blood” does not change color after it dries. This would leave a long-term “scar” that never goes away in the prosthetic, requiring replacement by the wearer before normal visual appearance could return. Once the damage indicating “blood” can change color to that of the original skin tone upon drying or “healing”, the bleeding effect would be of benefit to the usage of the material in real applications without risk of the uncanny valley. For more on the conceptualization and development of self-healing polymers, the reader is directed to a recent review by Pathan and Shende [26].
6. Conclusions
Simple latex rubber or silicone prosthetics are becoming a thing of the past. While these materials afforded some semblance of life-like character in the second half of the twentieth century, advances in polymer composite technology have opened the door for more lifelike and utile artificial skins. Synthetic conductive polymer composite skin technology is evolving at a rapid rate, although the state-of-the-art does not readily enable new artificial skin materials and devices to leave the well of Mori’s uncanny valley. In this paper, we suggest a Five Finger Rule for focusing efforts on the five biggest needs an artificial polymer skin must address to enable maximum functional utility as well as sociocultural acceptance. The five biggest needs include thoughtful design and optimization of mechanical, thermal, tactile, conductive, and self-healing properties. Today’s synthetic polymer skins have conductive and tactile properties that are near-lifelike and enable a sense of touch both from the material and within the material. The development of prosthetics is enabling a rise in the biomedical industry with touch sensing materials as well as improvements in the sex entertainment industry with synthetic skins that feel nearly real. Mechanical elements such as water retention and durability are explored and developed constantly. These materials, while continually advancing, risk the uncanny valley as they become more realistic without the realism of the underlying mechanical structure to which they are applied being improved at the same time. In some cases, it would not benefit an artificial limb to make the skin more realistic before the limb moves more like what it is imitating, otherwise a reaction of aversion is almost certain. However, development of materials is always beneficial so that when the time comes for a perfectly biomimetic appendage to be designed, the skin will be optimally designed for immediate application.
Author Contributions
Conceptualization, D.E.S. and E.D.S.; investigation, D.E.S.; writing—original draft preparation, D.E.S.; writing—review and editing, D.E.S. and E.D.S.; supervision, E.D.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable. This Communication reports no original data.
Conflicts of Interest
The authors declare no conflict of interest.
References
- What Is the Uncanny Valley? Available online: https://0-spectrum-ieee-org.brum.beds.ac.uk/what-is-the-uncanny-valley (accessed on 21 March 2022).
- Image of Uncanny Valley. Image Created by User Smurrayinchester, Based on Image by Masahiro Mori and Karl MacDorman. Used Here under CC BY-SA 3.0. Available online: https://commons.wikimedia.org/wiki/File:Mori_Uncanny_Valley.svg (accessed on 21 March 2022).
- How the Nazis Used Poster Art as Propaganda. Available online: https://www.dw.com/en/how-the-nazis-used-poster-art-as-propaganda/a-55751640 (accessed on 21 March 2022).
- Uncanny Valley. Available online: https://en.wikipedia.org/wiki/Uncanny_valley (accessed on 21 March 2022).
- We Talked to Sophia–The AI Robot That Once Said It Would ‘Destroy Humans’. Available online: https://www.youtube.com/watch?v=78-1MlkxyqI (accessed on 21 March 2022).
- Image of Robotic Hand (Stylized). Available online: https://unsplash.com/photos/sbVu5zitZt0 (accessed on 30 April 2022). contributed by user @thisisengineering.
- Peng, X.; Tan, G.; Zhou, J.; He, J.; Lawson, L.B.; McPherson, G.L.; John, V.T. Undulating Tubular Liposomes through Incorporation of a Synthetic Skin Ceramide into Phospholipid Bilayers. Langmuir 2009, 25, 10422–10425. [Google Scholar]
- Li, H.; Sinha, T.K.; Oh, J.S.; Kim, J.K. Soft and Flexible Bilayer Thermoplastic Polyurethane Foam for Development of Bioinspired Artificial Skin. ACS Appl. Mater. Interfaces 2018, 10, 14008–14016. [Google Scholar] [CrossRef] [PubMed]
- Singh, G.; Gupta, V.; Chanda, A. Artificial skin with varying biomechanical properties. Mater. Today Proc. 2022. [Google Scholar] [CrossRef]
- Park, Y.J.; Sharma, B.K.; Shinde, S.M.; Kim, M.-S.; Jang, B.; Kim, J.-H.; Ahn, J.-H. All MoS2-Based Large Area, Skin-Attachable Active-Matrix Tactile Sensor. ACS Nano 2019, 13, 3023–3030. [Google Scholar] [CrossRef] [PubMed]
- Fu, R.; Tu, L.; Zhou, Y.; Fan, L.; Zhang, F.; Wang, Z.; Xing, J.; Chen, D.; Deng, C.; Tan, G.; et al. A Tough and Self-Powered Hydrogel for Artificial Skin. Chem. Mater. 2019, 31, 9850–9860. [Google Scholar] [CrossRef]
- Ying, B.; Wu, Q.; Li, J.; Liu, X. An ambient-stable and stretchable ionic skin with multimodal sensation. Mater. Horiz. 2020, 7, 477–488. [Google Scholar] [CrossRef]
- Sonar, H.A.; Gerratt, A.P.; Lacour, S.P.; Paik, J. Closed-Loop Haptic Feedback Control Using a Self-Sensing Soft Pneumatic Actuator Skin. Soft Robot. 2020, 7, 22–29. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.; Nassar, J.; Xu, C.; Min, J.; Yang, Y.; Dai, A.; Doshi, R.; Huang, A.; Song, Y.; Gehlhar, R.; et al. Biofuel-powered soft electronic skin with multiplexed and wireless sensing for human-machine interfaces. Sci. Robot. 2020, 5, 1–13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tee, B.C.; Chortos, A.; Berndt, A.; Nguyen, A.K.; Tom, A.; McGuire, A.; Lin, Z.C.; Tien, K.; Bae, W.G.; Wang, H.; et al. A skin-inspired organic digital mechanoreceptor. Science 2015, 350, 313–316. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Osborn, L.E.; Dragomir, A.; Betthauser, J.L.; Hunt, C.L.; Nguyen, H.H.; Kaliki, R.R.; Thakor, N.V. Prosthesis with neuromorphic multilayered e-dermis perceives touch and pain. Sci. Robot. 2018, 3, eaat3818. [Google Scholar] [CrossRef] [Green Version]
- Panwar, V.; Mohanty, S.; Anoop, G.; Kumar, S. Actuation and self-sensing performance of soft polymer actuator skin using polyelectrolyte attached terpolymer. Sens. Actuators A 2020, 315, 112277. [Google Scholar] [CrossRef]
- Yi, F.-L.; Guo, F.-L.; Li, Y.-Q.; Wang, D.-Y.; Huang, P.; Fu, S.-Y. Polyacrylamide hydrogel composite e-skin fully mimicking human skin. ACS Appl. Mater. Interfaces 2021, 13, 32084–32093. [Google Scholar] [CrossRef] [PubMed]
- Choi, E.; Sul, O.; Lee, J.; Seo, H.; Kim, S.; Yeom, S.; Ryu, G.; Yang, H.; Shin, Y.; Lee, S.-B. Biomimetic tactile sensors with bilayer fingerprint ridges demonstrating texture recognition. Micromachines 2019, 10, 642. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, S.; Ozlu, B.; Eom, T.; Martin, D.C.; Shim, B.S. Electrically conducting polymers for bio-interfacing electronics: From neural and cardiac interfaces to bone and artificial tissue biomaterials. Biosens. Bioelectron. 2020, 170, 112620. [Google Scholar] [CrossRef] [PubMed]
- There’s a Heated Debate over the Best Sex Doll Skin Material. Available online: https://www.inverse.com/article/36055-best-sex-doll-robot-tpe-silicone (accessed on 21 March 2022).
- This Unsettling DIY ‘Skin’ Interface Will Definitely End Up on a Sex Robot. Available online: https://thenextweb.com/news/this-unsettling-diy-skin-interface-will-definitely-end-up-on-a-sex-robot (accessed on 21 March 2022).
- Park, S.; Shin, B.-G.; Jang, S.; Chung, K. Three-Dimensional Self-Healable Touch Sensing Artificial Skin Device. ACS Appl. Mater. Interfaces 2020, 12, 3953–3960. [Google Scholar] [CrossRef] [PubMed]
- Han, T.-Y.; Lin, C.-H.; Lin, Y.-S.; Yeh, C.-M.; Chen, Y.-A.; Li, H.-Y.; Xiao, Y.-T.; Chang, J.-W.; Su, A.-C.; Jeng, U.-S.; et al. Autonomously self-healing and ultrafast highly-stretching recoverable polymer through trans-octahedral metal-ligand coordination for skin-inspired tactile sensing. Chem. Eng. J. 2022, 438, 135592. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, X.; Bao, C.; Li, X.; Duan, F.; Friedrich, K.; Yang, J. Skin-Inspired, Fully Autonomous Self-Warning and Self-Repairing Polymeric Material under Damaging Events. Chem. Mater. 2019, 31, 2611–2618. [Google Scholar] [CrossRef]
- Pathan, N.; Shende, P. Strategic conceptualization and potential of self-healing polymers in biomedical field. Mater. Sci. Eng. C 2021, 125, 112099. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
Mori’s uncanny valley for some representative moving and still systems [2]. Of particular interest is the prosthetic hand, which displays high human likeness yet low familiarity or comfort level with an observer or someone interacting with the device.
Figure 1.
Mori’s uncanny valley for some representative moving and still systems [2]. Of particular interest is the prosthetic hand, which displays high human likeness yet low familiarity or comfort level with an observer or someone interacting with the device.

Figure 2.
The Five Finger Rule outlines the key areas needed for evolving artificial conductive polymer composite skins out of the uncanny valley. Image credit from [6].
Figure 2.
The Five Finger Rule outlines the key areas needed for evolving artificial conductive polymer composite skins out of the uncanny valley. Image credit from [6].

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Snyder, D.E.; Sapper, E.D. See Me, Feel Me, Touch Me, Heal Me: A Contextual Overview of Conductive Polymer Composites as Synthetic Human Skin. J. Compos. Sci. 2022, 6, 141. https://0-doi-org.brum.beds.ac.uk/10.3390/jcs6050141
AMA Style
Snyder DE, Sapper ED. See Me, Feel Me, Touch Me, Heal Me: A Contextual Overview of Conductive Polymer Composites as Synthetic Human Skin. Journal of Composites Science. 2022; 6(5):141. https://0-doi-org.brum.beds.ac.uk/10.3390/jcs6050141
Chicago/Turabian StyleSnyder, Douglas E., and Erik D. Sapper. 2022. "See Me, Feel Me, Touch Me, Heal Me: A Contextual Overview of Conductive Polymer Composites as Synthetic Human Skin" Journal of Composites Science 6, no. 5: 141. https://0-doi-org.brum.beds.ac.uk/10.3390/jcs6050141