
Recent Advances in Deep Reinforcement Learning Applications for Solving Partially Observable Markov Decision Processes (POMDP) Problems: Part 1—Fundamentals and Applications in Games, Robotics and Natural Language Processing


Abstract
:1. Introduction
1.1. Markov Decision Processes
1.2. Partially Observable Markov Decision Processes
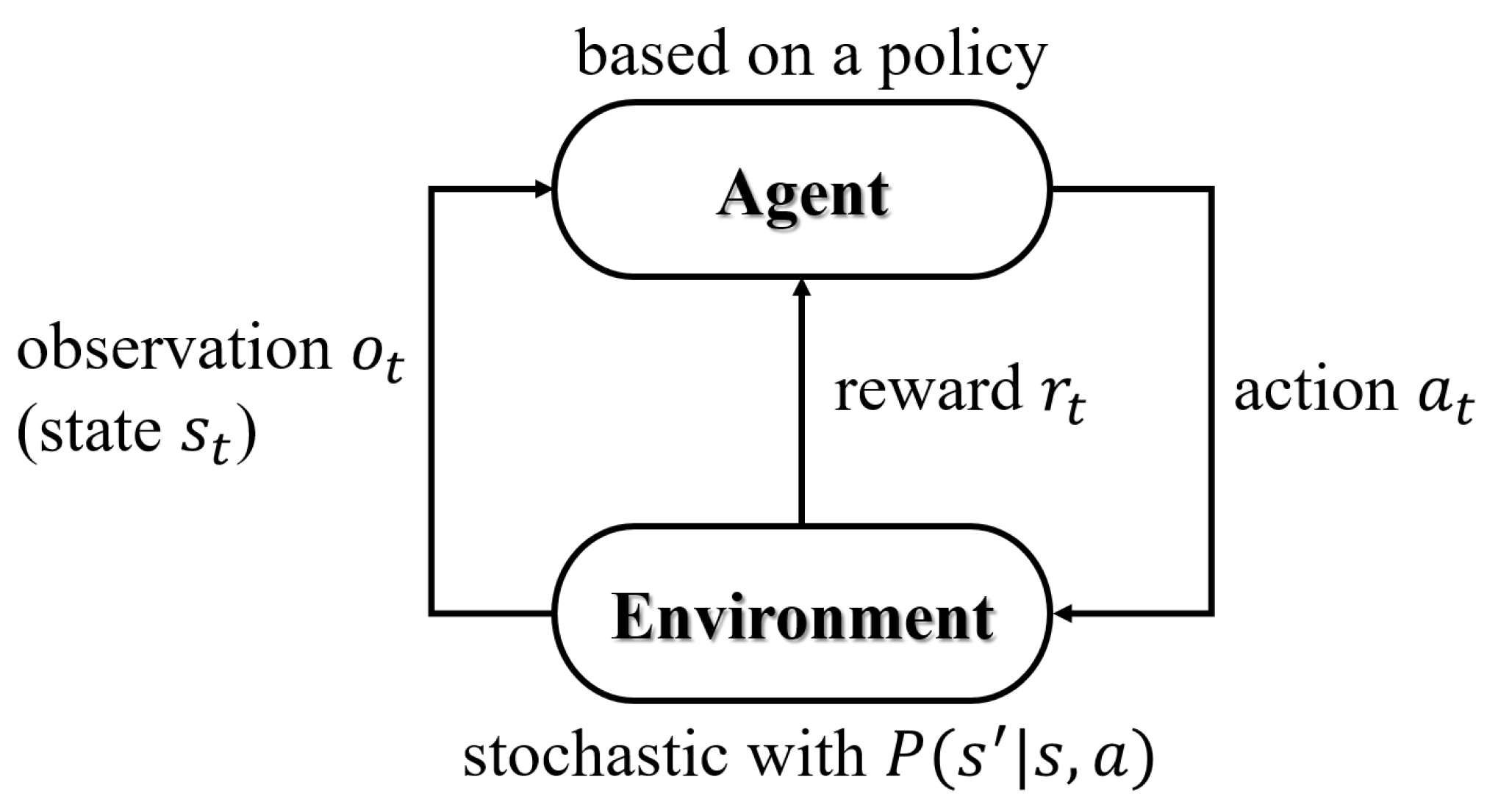
1.3. Reinforcement Learning
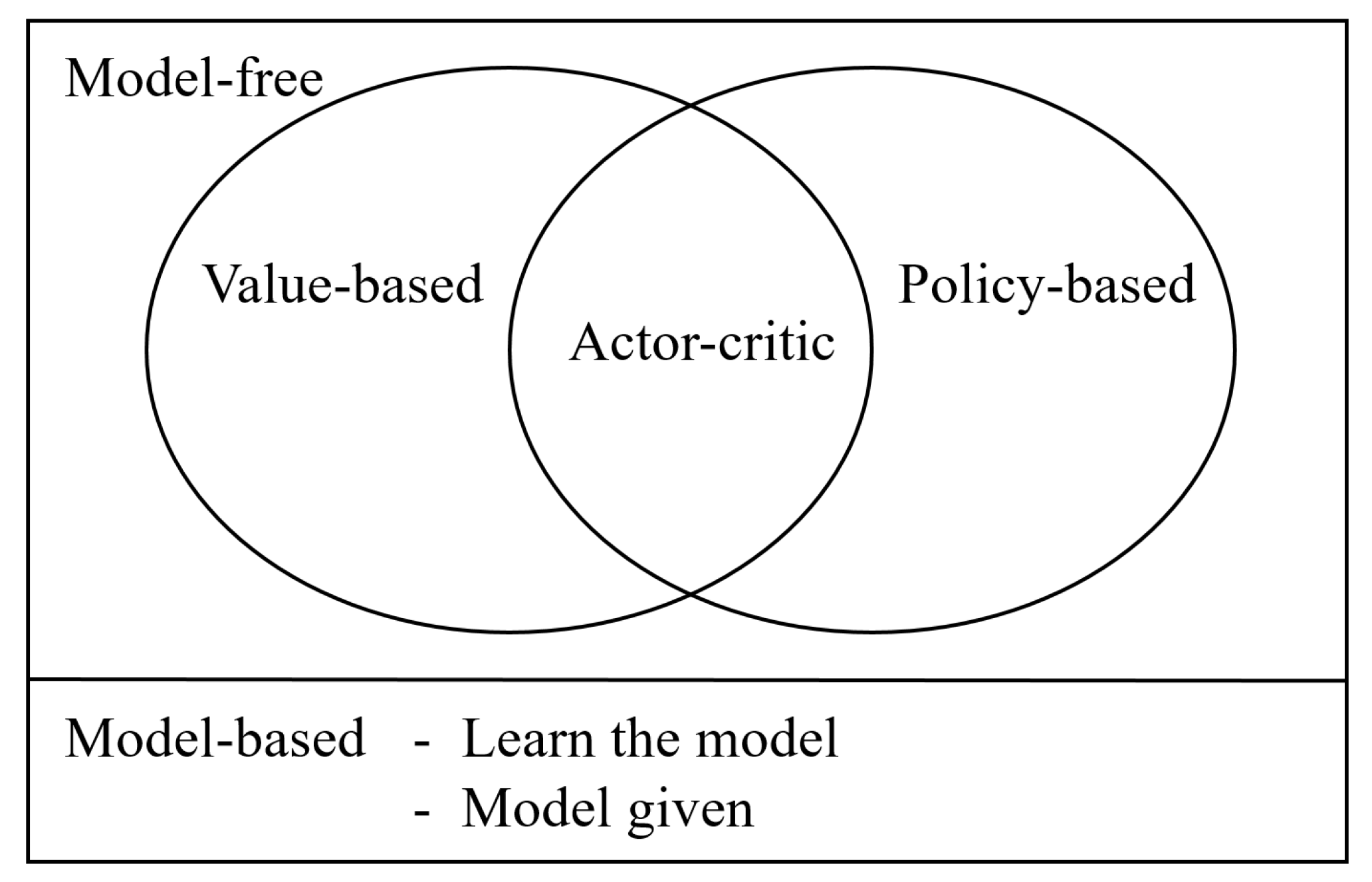
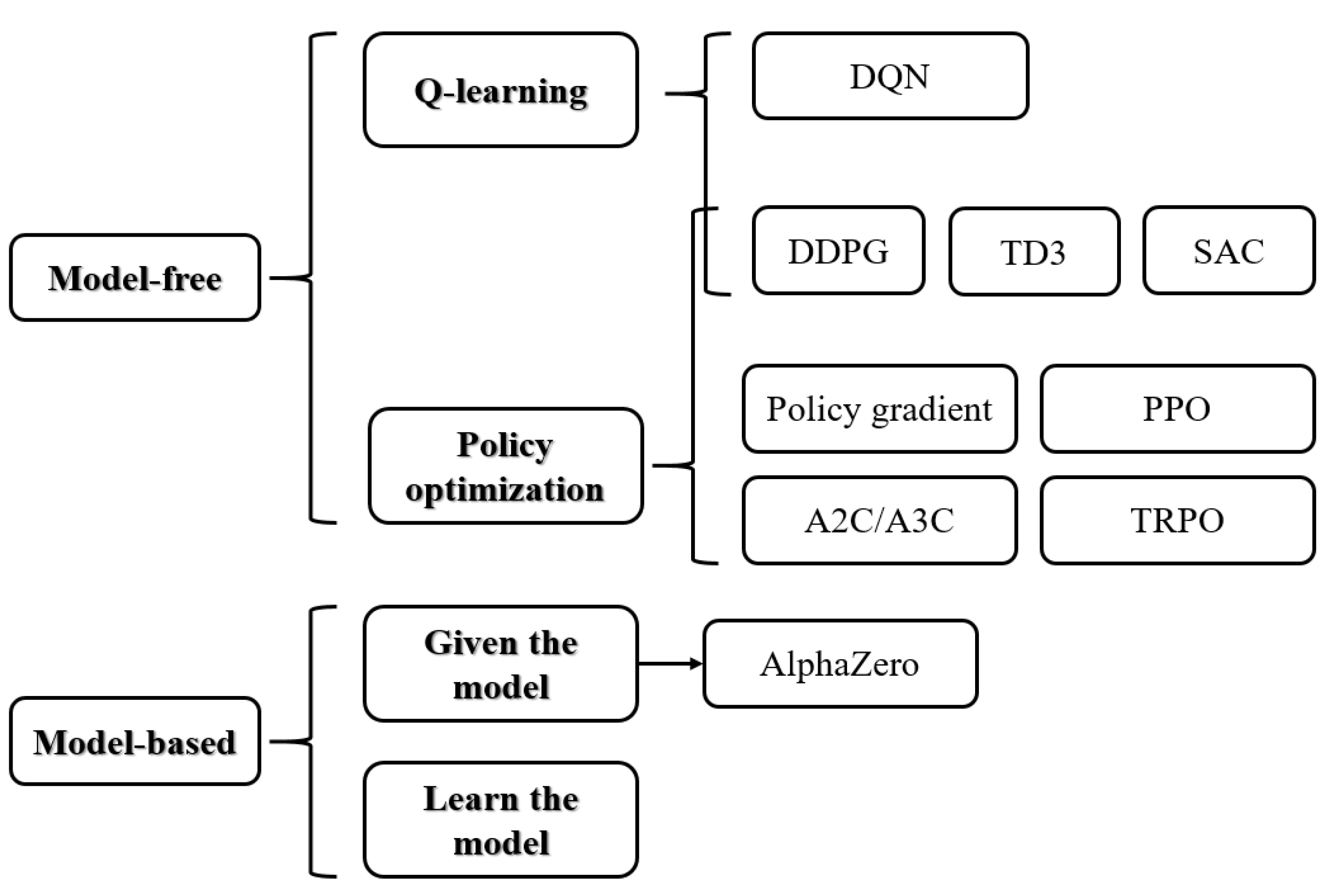
1.3.1. RL Algorithms
Dynamic Programming
Monte Carlo and TD Learning
Q-Learning
1.4. Deep Reinforcement Learning
1.4.1. Value-Based Algorithms
1.4.2. Policy-Based Algorithms
1.4.3. Actor-Critic Algorithms
2. Applications
2.1. Games
2.1.1. Board Games
RL in Board Games
AlphaGo
2.1.2. Card Games
Texas Hold’em Poker
Hearts and Wizard
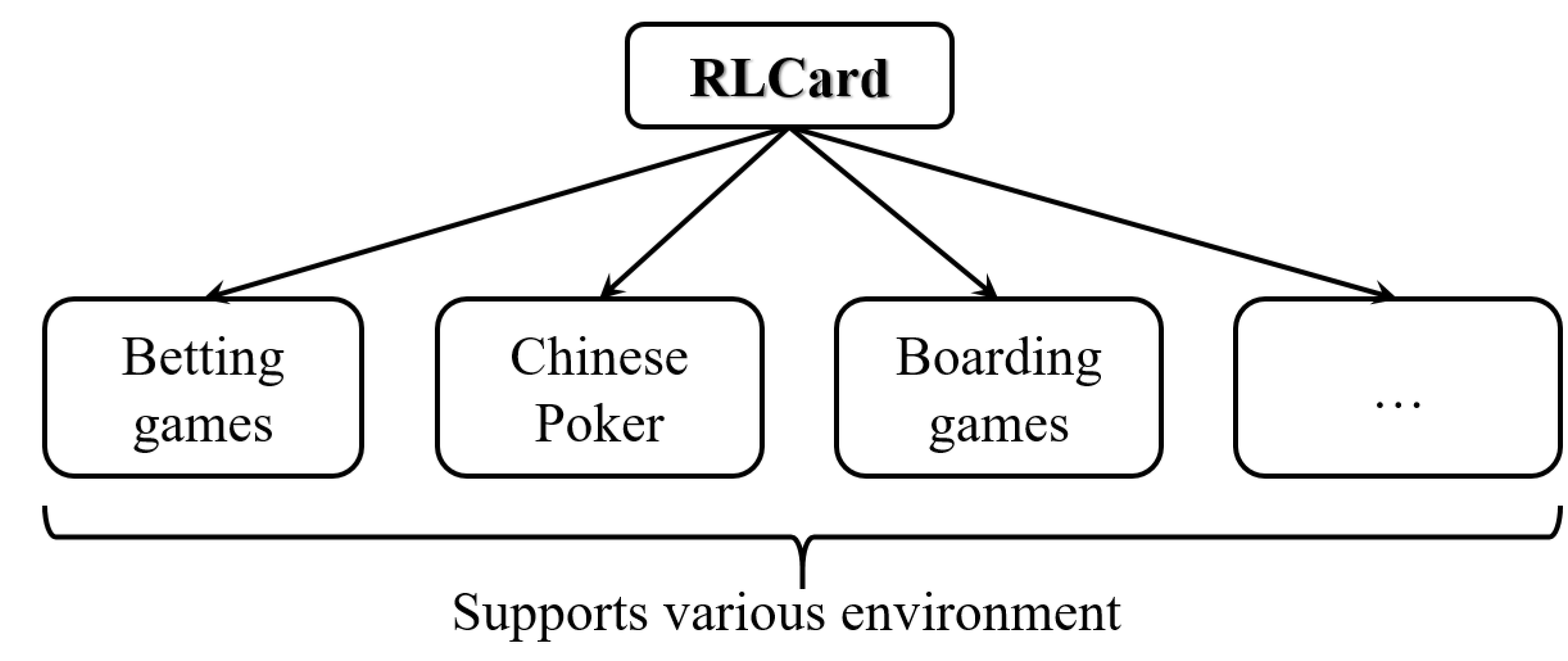
RLCard
2.1.3. Video Games
Atari
ViZDoom
TORCS
Minecraft
DeepMind Lab
Real-Time Strategy Games

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| StarCraft Algorithms | Main Techniques |
|---|---|
| GMEZO [99] | Micromanagement; greedy MDP; episodic zero-order exploration |
| BiCNet [100] | Multiagent bidirectionally coordinated network |
| Stabilising Experience Replay [101] | Importance sampling; fingerprints |
| PS-MAGDS [102] | Parameter sharing multi-agent gradient descent SARSA() |
| MS-MARL [103] | Master-slave architecture; multi-agent |
| QMIX [104] | Decentralised policies in a centralised end-to-end training |
| NNFQ CNNFQ [105] | Neural network fitted Q-Learning |
| SC2LE [106] | FullyConv-A2C; baseline results |
| Relational DRL [107] | Self-attention to iteratively reason about the relations |
| TStarBots [108] | Flat action structure; hierarchical action structure |
| Modular architecture [109] | Splits responsibilities between multiple modules |
| Two-level hierarchical RL [110] | Macro-actions; a two-layer hierarchical architecture |
2.2. Robotics
2.2.1. Manipulation
Multi-Fingered Hands
Grasping
Opening a Door
Cloth Manipulation
Magnetic Manipulation
2.2.2. Locomotion
Walking/Running
Hopping
Swimming
Tensegrity
2.2.3. Robotics Simulators
2.3. Natural Language Processing
2.3.1. Neural Machine Translation
2.3.2. Dialogue
Text Generation
Sentence Simplification
Coherent Dialogues
Goal-Oriented Dialogues
2.3.3. Visual Dialogue
Visual Captioning
Visual Relationship and Attribute Detection
3. Conclusions
3.1. Summary
3.2. Final Thoughts
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Sutton, R.S.; Barto, A.G. Reinforcement Learning—An Introduciton, 2nd ed.; The MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- OpenAI. Part 2: Kinds of RL Algorithms—A Taxonomy of RL Algorithms. 2018. Available online: https://spinningup.openai.com/en/latest/spinningup/rl_intro2.html (accessed on 1 July 2021).
- Watkins, C.J.; Dayan, P. Q Learning. Mach. Learn. 1992, 8, 279–292. [Google Scholar] [CrossRef]
- Rummery, G.A.; Niranjan, M. Q-Learning Using Connectionist Systems; University of Cambridge, Department of Engineering: Cambridge, UK, 1994. [Google Scholar]
- Li, Y. Deep Reinforcement Learning: An Overview. arXiv 2018, arXiv:1701.07274. [Google Scholar]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Graves, A.; Antonoglou, I.; Wierstra, D.; Riedmiller, M. Playing Atari with Deep Reinforcement Learning. arXiv 2013, arXiv:1312.5602. [Google Scholar]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Rusu, A.A.; Veness, J. Human-level control through deep reinforcement learning. Nature 2015, 518, 529–533. [Google Scholar] [CrossRef] [PubMed]
- van Hasselt, H.; Guez, A.; Silver, D. Deep Reinforcement Learning with Double Q-Learning. arXiv 2015, arXiv:1509.06461. [Google Scholar]
- van Hasselt, H. Double Q-Learning. Adv. Neural Inf. Process. Syst. 2010, 23, 2613–2621. [Google Scholar]
- Schaul, T.; Quan, J.; Antonoglou, I.; Silver, D. Prioritized Experience Replay. arXiv 2016, arXiv:1511.05952. [Google Scholar]
- Wang, Z.; Schaul, T.; Hessel, M.; can Hasselt, H.; Lanctot, M.; de Freitas, N. Dueling Network Architectures for Deep Reinforcement Learning. In Proceedings of the 33rd International Conference on Machine Learning, New York, NY, USA, 20–22 June 2016. [Google Scholar]
- Bellemare, M.G.; Dabney, W.; Munos, R. A Distributional Perspective on Reinforcement Learning. In Proceedings of the 34th International Conference on Machine Learning, Sydney, Australia, 6–11 August 2017. [Google Scholar]
- Fortunato, M.; Azar, M.G.; Piot, B. Noisy Networks for Exploration. arXiv 2018, arXiv:1706.10295. [Google Scholar]
- Hessel, M.; Modayil, J.; van Hasselt, H.; Schaul, T.; Ostrovski, G.; Dabney, W.; Horgan, D.; Piot, B.; Azar, M.; Silver, D. Rainbow: Combining Improvements in Deep Reinforcement Learning. In Proceedings of the 32nd AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018. [Google Scholar]
- Sutton, R.S. Learning to Predict by the Methods of Temporal Differences. Mach. Learn. 1988, 3, 9–44. [Google Scholar] [CrossRef]
- Nair, A.; Srinivasan, P.; Blackwell, S.; Alcicek, C.; Fearon, R.; Maria, A.D.; Panneershelvam, V.; Suleyman, M.; Beattie, C.; Petersen, S.; et al. Massively Parallel Methods for Deep Reinforcement Learning. arXiv 2015, arXiv:1507.04296. [Google Scholar]
- Kulkarni, T.D.; Narasimhan, K.R.; Saeedi, A.; Tenenbaum, J.B. Hierarchical Deep Reinforcement Learning: Integrating Temporal Abstraction and Intrinsic Motivation. arXiv 2016, arXiv:1604.06057. [Google Scholar]
- Schulman, J.; Levine, S.; Moritz, P.; Jordan, M.; Abbeel, P. Trust Region Policy Optimization. In Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 6–11 July 2015. [Google Scholar]
- Schulman, J.; Wolski, F.; Dhariwal, P.; Radford, A.; Klimov, O. Proximal Policy Optimization Algorithms. arXiv 2017, arXiv:1707.06347. [Google Scholar]
- Silver, D.; Lever, G.; Heess, N.; Degris, T.; Wierstra, D.; Riedmiller, M. Deterministic Policy Gradient Algorithms. In Proceedings of the 31st International Conference on Machine Learning, Bejing, China, 22–24 June 2014. [Google Scholar]
- Lillicrap, T.P.; Hunt, J.J.; Alexander Pritzel, N.H.; Erez, T.; Tassa, Y.; Silver, D.; Wierstra, D. Continuous Control with Deep Reinforcement Learning. arXiv 2016, arXiv:1509.02971. [Google Scholar]
- O’Donoghue, B.; Munos, R.; Kavukcuoglu, K.; Mnih, V. Combining policy gradient and Q-learning. arXiv 2017, arXiv:1611.01626. [Google Scholar]
- Haarnoja, T.; Zhou, A.; Abbeel, P.; Levine, S. Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor. In Proceedings of the 35th International Conference on Machine Learning, Stockholm, Sweden, 10–15 July 2018. [Google Scholar]
- Mnih, V.; Badia, A.P.; Mirza, M.; Graves, A.; Harley, T.; Lillicrap, T.P.; Silver, D.; Kavukcuoglu, K. Asynchronous Methods for Deep Reinforcement Learning. In Proceedings of the 33rd International Conference on Machine Learning, New York, NY, USA, 20–22 June 2016. [Google Scholar]
- Osband, I.; Blundell, C.; Pritzel, A.; Van Roy, B. Deep Exploration via Bootstrapped DQN. arXiv 2016, arXiv:1602.04621. [Google Scholar]
- Fujimoto, S.; van Hoof, H.; Meger, D. Addressing Function Approximation Error in Actor-Critic Methods. arXiv 2018, arXiv:1802.09477. [Google Scholar]
- Tesauro, G. TD-Gammon, a Self-Teaching Backgammon Program, Achieves Master-Level Play. Neural Comput. 1994, 6, 215–219. [Google Scholar] [CrossRef]
- Buro, M. How Machines have Learned to Play Othello. IEEE Intell. Syst. 1999, 14, 12–14. [Google Scholar]
- Schaeffer, J.; Burch, N.; Bjornsson, Y.; Kishimoto, A.; Muller, M.; Lake, R.; Lu, P.; Sutphen, S. Checkers Is Solved. Science 2007, 317, 1518–1522. [Google Scholar] [CrossRef] [Green Version]
- Ginsberg, M.L. GIB: Imperfect Information in a Computationally Challenging Game. J. Artif. Intell. Res. 2001, 14, 303–358. [Google Scholar] [CrossRef]
- Huang, S.C.; Arneson, B.; Hayward, R.B.; Müller, M.; Pawlewicz, J. MoHex 2.0: A Pattern-Based MCTS Hex Player. In Computers and Games; van den Herik, H.J., Iida, H., Plaat, A., Eds.; Series Title: Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2014; Volume 8427, pp. 60–71. [Google Scholar] [CrossRef]
- Gao, C.; Hayward, R.; Muller, M. Move Prediction Using Deep Convolutional Neural Networks in Hex. IEEE Trans. Games 2018, 10, 336–343. [Google Scholar] [CrossRef]
- Mannen, H.; Wiering, M. Learning To Play Chess Using Reinforcement Learning with Database Games. Master’s Thesis, Cognitive Artificial Intelligence Utrecht University, Utrecht, The Netherlands, October 2003. [Google Scholar]
- Block, M.; Bader, M.; Tapia, E.; Ramírez, M.; Gunnarsson, K.; Cuevas, E.; Zaldivar, D.; Rojas, R. Using Reinforcement Learning in Chess Engines. Res. Comput. Sci. 2008, 35, 31–40. [Google Scholar]
- Baxter, J.; Tridgell, A.; Weaver, L. KnightCap: A chess program that learns by combining TD(lambda) with game-tree search. arXiv 1999, arXiv:cs/9901002. [Google Scholar]
- Lai, M. Giraffe: Using Deep Reinforcement Learning to Play Chess. arXiv 2008, arXiv:1509.01549. [Google Scholar]
- Silver, D.; Huang, A.; Maddison, C.J.; Guez, A.; Sifre, L.; van den Driessche, G.; Schrittwieser, J.; Antonoglou, I.; Panneershelvam, V.; Lanctot, M.; et al. Mastering the game of Go with deep neural networks and tree search. Nature 2016, 529, 484–489. [Google Scholar] [CrossRef] [PubMed]
- Silver, D.; Schrittwieser, J.; Simonyan, K.; Antonoglou, I.; Huang, A.; Guez, A.; Hubert, T.; Baker, L.; Lai, M.; Bolton, A.; et al. Mastering the game of Go without human knowledge. Nature 2017, 550, 354–359. [Google Scholar] [CrossRef]
- Silver, D.; Hubert, T.; Schrittwieser, J.; Antonoglou, I.; Lai, M.; Guez, A.; Lanctot, M.; Sifre, L.; Kumaran, D.; Graepel, T.; et al. A general reinforcement learning algorithm that masters chess, shogi, and Go through self-play. Science 2018, 362, 1140–1144. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kimura, T.; Sakamoto, K.; Sogabe, T. Development of AlphaZero-based Reinforcment Learning Algorithm for Solving Partially Observable Markov Decision Process (POMDP) Problem. Bull. Netw. Comput. Syst. Softw. 2020, 9, 69–73. [Google Scholar]
- Davidson, A. Using Artifical Neural Networks to Model Opponents in Texas Hold’em. Department of Computing Science, University of Alberta, Edmonton, Alberta, Canada, November 1999. Available online: http://www.spaz.ca/aaron/poker/nnpoker.pdf (accessed on 1 July 2021).
- Davidson, A.; Billings, D.; Schaeffer, J.; Szafron, D. Improved Opponent Modeling in Poker. Department of Computing Science, University of Alberta, Edmonton, Alberta, Canada, January 2002. Available online: https://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.480.8603&rep=rep1&type=pdf (accessed on 1 July 2021).
- Felixa, D.; Reis, L.P. An Experimental Approach to Online Opponent Modeling in Texas Hold’em Poker. In Advances in Artificial Intelligence—SBIA 2008; Zaverucha, G., da Costa, A.L., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 83–92. [Google Scholar]
- Southey, F.; Bowling, M.; Larson, B.; Piccione, C.; Burch, N.; Billings, D.; Rayner, D.C. Bayes’ Bluff: Opponent Modelling in Poker. arXiv 2012, arXiv:1207.1411. [Google Scholar]
- Zinkevich, M.; Johanson, M.; Bowling, M.; Piccione, C. Regret Minimization in Games with Incomplete Information. In Advances in Neural Information Processing Systems 20; Platt, J.C., Koller, D., Singer, Y., Roweis, S.T., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2008; pp. 1729–1736. [Google Scholar]
- Bowling, M.; Burch, N.; Johanson, M.; Tammelin, O. Heads-up limit hold’em poker is solved. Science 2015, 347, 145–149. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brown, N.; Lerer, A.; Gross, S.; Sandholm, T. Deep Counterfactual Regret Minimization. arXiv 2018, arXiv:1811.00164. [Google Scholar]
- Moravčík, M.; Schmid, M.; Burch, N.; Lisý, V.; Morrill, D.; Bard, N.; Davis, T.; Waugh, K.; Johanson, M.; Bowling, M. DeepStack: Expert-level artificial intelligence in heads-up no-limit poker. Science 2017, 356, 508–513. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brown, N.; Sandholm, T. Superhuman AI for multiplayer poker. Science 2019, 365, 885–890. [Google Scholar] [CrossRef]
- Ishii, S.; Fujita, H.; Mitsutake, M.; Yamazaki, T.; Matsuda, J.; Matsuno, Y. A Reinforcement Learning Scheme for a Partially-Observable Multi-Agent Game. Mach. Learn. 2005, 59, 31–54. [Google Scholar] [CrossRef] [Green Version]
- Fujita, H.; Ishii, S. Model-based Reinforcement Learning for Partially Observable Games with Sampling-based State Estimation. Neural Comput. 2007, 19, 3051–3087. [Google Scholar] [CrossRef] [Green Version]
- Sturtevant, N.R.; White, A.M. Feature Construction for Reinforcement Learning in Hearts. In International Conference on Computers and Games; Springer: Berlin/Heidelberg, Germany, 2006; pp. 122–134. [Google Scholar]
- Wagenaar, M.; Wiering, D.M. Learning to Play the Game of Hearts Using Reinforcement Learning and a Multi-Layer Perceptron. Bachelor’s Thesis, University of Groningen, Groningen, The Netherlands, 2017. Available online: http://fse.studenttheses.ub.rug.nl/id/eprint/15440 (accessed on 11 July 2021).
- Backhus, J.C.; Nonaka, H.; Yoshikawa, T.; Sugimoto, M. Application of reinforcement learning to the card game Wizard. In Proceedings of the 2013 IEEE 2nd Global Conference on Consumer Electronics (GCCE), Tokyo, Japan, 1–4 October 2013; pp. 329–333. [Google Scholar]
- Heinrich, J.; Lanctot, M. Fictitious Self-Play in Extensive-Form Games. In Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 805–813. [Google Scholar]
- Heinrich, J.; Silver, D. Deep Reinforcement Learning from Self-Play in Imperfect-Information Games. arXiv 2016, arXiv:1603.01121. [Google Scholar]
- Lanctot, M.; Zambaldi, V.; Gruslys, A.; Lazaridou, A.; Tuyls, K.; Perolat, J.; Silver, D.; Graepel, T. A Unified Game-Theoretic Approach to Multiagent Reinforcement Learning. In Advances in Neural Information Processing Systems 30; Guyon, I., Luxburg, U.V., Bengio, S., Wallach, H., Fergus, R., Vishwanathan, S., Garnett, R., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2017; pp. 4190–4203. [Google Scholar]
- Zha, D.; Lai, K.H.; Cao, Y.; Huang, S.; Wei, R.; Guo, J.; Hu, X. RLCard: A Toolkit for Reinforcement Learning in Card Games. arXiv 2019, arXiv:1910.04376. [Google Scholar]
- Shao, K.; Tang, Z.; Zhu, Y.; Li, N.; Zhao, D. A Survey of Deep Reinforcement Learning in Video Games. arXiv 2019, arXiv:1912.10944. [Google Scholar]
- Bellemare, M.G.; Naddaf, Y.; Veness, J.; Bowling, M. The Arcade Learning Environment: An Evaluation Platform for General Agents. J. Artif. Intell. Res. 2013, 47, 253–279. [Google Scholar] [CrossRef]
- Hausknecht, M.; Stone, P. Deep Recurrent Q-Learning for Partially Observable MDPs. arXiv 2017, arXiv:1507.06527. [Google Scholar]
- Zhu, P.; Li, X.; Poupart, P.; Miao, G. On Improving Deep Reinforcement Learning for POMDPs. arXiv 2018, arXiv:1704.07978. [Google Scholar]
- Aytar, Y.; Pfaff, T.; Budden, D.; Paine, T.; Wang, Z.; de Freitas, N. Playing hard exploration games by watching YouTube. In Advances in Neural Information Processing Systems 31; Bengio, S., Wallach, H., Larochelle, H., Grauman, K., Cesa-Bianchi, N., Garnett, R., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2018; pp. 2930–2941. [Google Scholar]
- Kempka, M.; Wydmuch, M.; Runc, G.; Toczek, J.; Jaskowski, W. ViZDoom: A Doom-based AI Research Platform for Visual Reinforcement Learning. In Proceedings of the 2016 IEEE Conference on Computational Intelligence and Games (CIG), Santorini, Greece, 20–23 September 2016. [Google Scholar]
- Lample, G.; Chaplot, D.S. Playing FPS Games with Deep Reinforcement Learning. arXiv 2016, arXiv:1609.05521. [Google Scholar]
- Papoudakis, G.; Chatzidimitriou, K.C.; Mitkas, P.A. Deep Reinforcement Learning for Doom using Unsupervised Auxiliary Tasks. arXiv 2018, arXiv:1807.01960. [Google Scholar]
- Akimov, D.; Makarov, I. Deep Reinforcement Learning with VizDoom First-Person Shooter. CEUR Workshop Proc. 2019, 2479, 3–17. [Google Scholar]
- Wu, Y.; Tian, Y. Training Agent for First-Person Shooter Game with Actor-Critic Curriculum Learning. In Proceedings of the International Conference on Learning Representations, Toulon, France, 24–26 April 2017. [Google Scholar]
- Bengio, Y.; Louradour, J.; Collobert, R.; Weston, J. Curriculum Learning. In Proceedings of the 26th Annual International Conference on Machine Learning, ICML ’09, Montreal, QC, Canada, 14–18 June 2009; Association for Computing Machinery: New York, NY, USA, 2009; pp. 41–48. [Google Scholar] [CrossRef]
- Parisotto, E.; Salakhutdinov, R. Neural Map: Structured Memory for Deep Reinforcement Learning. arXiv 2017, arXiv:1702.08360. [Google Scholar]
- Shao, K.; Zhao, D.; Li, N.; Zhu, Y. Learning Battles in ViZDoom via Deep Reinforcement Learning. In Proceedings of the 2018 IEEE Conference on Computational Intelligence and Games (CIG), Maastricht, The Netherlands, 14–17 August 2018; pp. 1–4. [Google Scholar]
- Koutník, J.; Schmidhuber, J.; Gomez, F. Online Evolution of Deep Convolutional Network for Vision-Based Reinforcement Learning. In Proceedings of the International Conference on Simulation of Adaptive Behavior, Aberystwyth, UK, 23–26 August 2014; pp. 260–269. [Google Scholar] [CrossRef] [Green Version]
- Koutník, J.; Schmidhuber, J.; Gomez, F. Evolving deep unsupervised convolutional networks for vision-based reinforcement learning. In Proceedings of the 2014 Conference on Genetic and Evolutionary Computation—GECCO ’14, Vancouver, BC, Canada, 12–16 July 2014; ACM Press: Vancouver, BC, Canada, 2014; pp. 541–548. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Jia, D.; Weng, X. Deep Reinforcement Learning for Autonomous Driving. arXiv 2019, arXiv:1811.11329. [Google Scholar]
- Sallab, A.E.; Abdou, M.; Perot, E.; Yogamani, S. End-to-End Deep Reinforcement Learning for Lane Keeping Assist. arXiv 2016, arXiv:1612.04340. [Google Scholar]
- Liu, K.; Wan, Q.; Li, Y. A Deep Reinforcement Learning Algorithm with Expert Demonstrations and Supervised Loss and its application in Autonomous Driving. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 2944–2949. [Google Scholar]
- Verma, A.; Murali, V.; Singh, R.; Kohli, P.; Chaudhuri, S. Programmatically Interpretable Reinforcement Learning. arXiv 2019, arXiv:1804.02477. [Google Scholar]
- Sharma, S.; Lakshminarayanan, A.S.; Ravindran, B. Fine grained action repetition for deep reinforcement learning. arXiv 2017, arXiv:1702.06054. [Google Scholar]
- Gao, Y.; Xu, H.; Lin, J.; Yu, F.; Levine, S.; Darrell, T. Reinforcement Learning from Imperfect Demonstrations. arXiv 2018, arXiv:1802.05313. [Google Scholar]
- Mazumder, S.; Liu, B.; Wang, S.; Zhu, Y.; Liu, L.; Li, J. Action Permissibility in Deep Reinforcement Learning and Application to Autonomous Driving. In KDD’18 Deep Learning Day; ACM: London, UK, 2018. [Google Scholar]
- Li, D.; Zhao, D.; Zhang, Q.; Chen, Y. Reinforcement Learning and Deep Learning based Lateral Control for Autonomous Driving. arXiv 2018, arXiv:1810.12778. [Google Scholar]
- Zhu, Y.; Zhao, D. Driving Control with Deep and Reinforcement Learning in The Open Racing Car Simulator. In Neural Information Processing; Cheng, L., Leung, A.C.S., Ozawa, S., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 326–334. [Google Scholar]
- Johnson, M.; Hofmann, K.; Hutton, T.; Bignell, D. The Malmo Platform for Artificial Intelligence Experimentation. IJCAI. 2016. pp. 4246–4247. Available online: https://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.1045.1281&rep=rep1&type=pdf (accessed on 1 July 2021).
- Guss, W.H.; Houghton, B.; Topin, N.; Wang, P.; Codel, C.; Veloso, M.; Salakhutdinov, R. MineRL: A Large-Scale Dataset of Minecraft Demonstrations. arXiv 2019, arXiv:1907.13440. [Google Scholar]
- Liu, L.T.; Dogan, U.; Hofmann, K. Decoding multitask DQN in the world of Minecraft. In Proceedings of the 13th European Workshop on Reinforcement Learning (EWRL), Barcelona, Spain, 3–4 December 2016; p. 11. [Google Scholar]
- Oh, J.; Chockalingam, V.; Singh, S.P.; Lee, H. Control of Memory, Active Perception, and Action in Minecraft. arXiv 2016, arXiv:1605.09128. [Google Scholar]
- Frazier, S. Improving Deep Reinforcement Learning in Minecraft with Action Advice. arXiv 2019, arXiv:1908.01007. [Google Scholar]
- Xiong, Y.; Chen, H.; Zhao, M.; An, B. HogRider: Champion Agent of Microsoft Malmo Collaborative AI Challenge. In Proceedings of the 32nd AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018. [Google Scholar]
- Tessler, C.; Givony, S.; Zahavy, T.; Mankowitz, D.J.; Mannor, S. A Deep Hierarchical Approach to Lifelong Learning in Minecraft. arXiv 2016, arXiv:1604.07255. [Google Scholar]
- Jin, P.H.; Levine, S.; Keutzer, K. Regret Minimization for Partially Observable Deep Reinforcement Learning. arXiv 2017, arXiv:1710.11424. [Google Scholar]
- Beattie, C.; Leibo, J.Z.; Teplyashin, D.; Ward, T.; Wainwright, M.; Küttler, H.; Lefrancq, A.; Green, S.; Valdés, V.; Sadik, A.; et al. DeepMind Lab. arXiv 2016, arXiv:1612.03801. [Google Scholar]
- Johnston, L. Surprise Pursuit Auxiliary Task for Deepmind Lab Maze. n.d. p. 7. Available online: http://cs231n.stanford.edu/reports/2017/pdfs/610.pdf (accessed on 1 July 2021).
- Mankowitz, D.J.; Zídek, A.; Barreto, A.; Horgan, D.; Hessel, M.; Quan, J.; Oh, J.; van Hasselt, H.; Silver, D.; Schaul, T. Unicorn: Continual Learning with a Universal, Off-policy Agent. arXiv 2018, arXiv:1802.08294. [Google Scholar]
- Schmitt, S.; Hudson, J.J.; Zídek, A.; Osindero, S.; Doersch, C.; Czarnecki, W.M.; Leibo, J.Z.; Küttler, H.; Zisserman, A.; Simonyan, K.; et al. Kickstarting Deep Reinforcement Learning. arXiv 2018, arXiv:1803.03835. [Google Scholar]
- Jaderberg, M.; Czarnecki, W.M.; Dunning, I.; Marris, L.; Lever, G.; Castañeda, A.G.; Beattie, C.; Rabinowitz, N.C.; Morcos, A.S.; Ruderman, A.; et al. Human-level performance in first-person multiplayer games with population-based deep reinforcement learning. arXiv 2018, arXiv:1807.01281. [Google Scholar]
- Leibo, J.Z.; de Masson d’Autume, C.; Zoran, D.; Amos, D.; Beattie, C.; Anderson, K.; Castañeda, A.G.; Sanchez, M.; Green, S.; Gruslys, A.; et al. Psychlab: A Psychology Laboratory for Deep Reinforcement Learning Agents. arXiv 2018, arXiv:1801.08116. [Google Scholar]
- Vinyals, O.; Babuschkin, I.; Czarnecki, W.M.; Mathieu, M.; Dudzik, A.; Chung, J.; Choi, D.H.; Powell, R.; Ewalds, T.; Georgiev, P.; et al. Grandmaster level in StarCraft II using multi-agent reinforcement learning. Nature 2019, 575, 350–354. [Google Scholar] [CrossRef]
- Open, A.I.; Berner, C.; Brockman, G.; Chan, B.; Cheung, V.; Dębiak, P.; Dennison, C.; Farhi, D.; Fischer, Q.; Hashme, S.; et al. Dota 2 with Large Scale Deep Reinforcement Learning. arXiv 2019, arXiv:1912.06680. [Google Scholar]
- Usunier, N.; Synnaeve, G.; Lin, Z.; Chintala, S. Episodic Exploration for Deep Deterministic Policies: An Application to StarCraft Micromanagement Tasks. arXiv 2016, arXiv:1609.02993. [Google Scholar]
- Peng, P.; Yuan, Q.; Wen, Y.; Yang, Y.; Tang, Z.; Long, H.; Wang, J. Multiagent Bidirectionally-Coordinated Nets for Learning to Play StarCraft Combat Games. arXiv 2017, arXiv:1703.10069. [Google Scholar]
- Foerster, J.N.; Nardelli, N.; Farquhar, G.; Torr, P.H.S.; Kohli, P.; Whiteson, S. Stabilising Experience Replay for Deep Multi-Agent Reinforcement Learning. arXiv 2017, arXiv:1702.08887. [Google Scholar]
- Shao, K.; Zhu, Y.; Zhao, D. StarCraft Micromanagement With Reinforcement Learning and Curriculum Transfer Learning. IEEE Trans. Emerg. Top. Comput. Intell. 2019, 3, 73–84. [Google Scholar] [CrossRef] [Green Version]
- Kong, X.; Xin, B.; Liu, F.; Wang, Y. Revisiting the Master-Slave Architecture in Multi-Agent Deep Reinforcement Learning. arXiv 2017, arXiv:1712.07305. [Google Scholar]
- Rashid, T.; Samvelyan, M.; de Witt, C.S.; Farquhar, G.; Foerster, J.N.; Whiteson, S. QMIX: Monotonic Value Function Factorisation for Deep Multi-Agent Reinforcement Learning. arXiv 2018, arXiv:1803.11485. [Google Scholar]
- Tang, Z.; Zhao, D.; Zhu, Y.; Guo, P. Reinforcement Learning for Build-Order Production in StarCraft II. In Proceedings of the 2018 Eighth International Conference on Information Science and Technology (ICIST), Cordoba/Granada/Seville, Spain, 30 June–6 July 2018; pp. 153–158. [Google Scholar]
- Vinyals, O.; Ewalds, T.; Bartunov, S.; Georgiev, P.; Vezhnevets, A.S.; Yeo, M.; Makhzani, A.; Küttler, H.; Agapiou, J.P.; Schrittwieser, J.; et al. StarCraft II: A New Challenge for Reinforcement Learning. arXiv 2017, arXiv:1708.04782. [Google Scholar]
- Zambaldi, V.F.; Raposo, D.; Santoro, A.; Bapst, V.; Li, Y.; Babuschkin, I.; Tuyls, K.; Reichert, D.P.; Lillicrap, T.P.; Lockhart, E.; et al. Relational Deep Reinforcement Learning. arXiv 2018, arXiv:1806.01830. [Google Scholar]
- Sun, P.; Sun, X.; Han, L.; Xiong, J.; Wang, Q.; Li, B.; Zheng, Y.; Liu, J.; Liu, Y.; Liu, H.; et al. TStarBots: Defeating the Cheating Level Builtin AI in StarCraft II in the Full Game. arXiv 2018, arXiv:1809.07193. [Google Scholar]
- Lee, D.; Tang, H.; Zhang, J.O.; Xu, H.; Darrell, T.; Abbeel, P. Modular Architecture for StarCraft II with Deep Reinforcement Learning. arXiv 2018, arXiv:1811.03555. [Google Scholar]
- Pang, Z.J.; Liu, R.Z.; Meng, Z.Y.; Zhang, Y.; Yu, Y.; Lu, T. On reinforcement learning for full-length game of starcraft. In Proceedings of the AAAI Conference on Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019; Volume 33, pp. 4691–4698. [Google Scholar]
- Argall, B.D.; Chernova, S.; Veloso, M.; Browning, B. A survey of robot learning from demonstration. Robot. Auton. Syst. 2009, 57, 469–483. [Google Scholar] [CrossRef]
- Deisenroth, M.P. A Survey on Policy Search for Robotics. Found. Trends Robot. 2013, 2, 1–142. [Google Scholar] [CrossRef] [Green Version]
- Kober, J.; Peters, J. Reinforcement Learning in Robotics: A Survey. In Learning Motor Skills: From Algorithms to Robot Experiments; Springer International Publishing: Cham, Switzerland, 2014; pp. 9–67. [Google Scholar] [CrossRef] [Green Version]
- Tai, L.; Zhang, J.; Liu, M.; Boedecker, J.; Burgard, W. A Survey of Deep Network Solutions for Learning Control in Robotics: From Reinforcement to Imitation. arXiv 2015, arXiv:1612.07139. [Google Scholar]
- Todorov, E.; Erez, T.; Tassa, Y. Mujoco: A physics engine for model-based control. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura/Algarve, Portugal, 7–12 October 2012; pp. 5026–5033. [Google Scholar]
- Nguyen, H.; La, H. Review of Deep Reinforcement Learning for Robot Manipulation. In Proceedings of the 2019 Third IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 25–27 February 2019; pp. 590–595. [Google Scholar]
- Peters, J.; Schaal, S. Reinforcement learning of motor skills with policy gradients. Neural Netw. 2008, 21, 682–697. [Google Scholar] [CrossRef] [Green Version]
- Peters, J.; Schaal, S. Natural actor-critic. Neurocomputing 2008, 71, 1180–1190. [Google Scholar] [CrossRef]
- Theodorou, E.; Buchli, J.; Schaal, S. Reinforcement learning of motor skills in high dimensions: A path integral approach. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 2397–2403. [Google Scholar]
- Peters, J.; Mülling, K.; Altun, Y. Relative entropy policy search. In Proceedings of the AAAI Conference on Artificial Intelligence, Atlanta, GA, USA, 11–15 July 2010; Volume 10, pp. 1607–1612. [Google Scholar]
- Kalakrishnan, M.; Righetti, L.; Pastor, P.; Schaal, S. Learning force control policies for compliant manipulation. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4639–4644. [Google Scholar]
- Nair, A.; McGrew, B.; Andrychowicz, M.; Zaremba, W.; Abbeel, P. Overcoming Exploration in Reinforcement Learning with Demonstrations. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 6292–6299. [Google Scholar]
- Kumar, V.; Tassa, Y.; Erez, T.; Todorov, E. Real-time behaviour synthesis for dynamic hand-manipulation. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 6808–6815. [Google Scholar]
- Kumar, V.; Todorov, E.; Levine, S. Optimal control with learned local models: Application to dexterous manipulation. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 378–383. [Google Scholar]
- Rajeswaran, A.; Kumar, V.; Gupta, A.; Schulman, J.; Todorov, E.; Levine, S. Learning Complex Dexterous Manipulation with Deep Reinforcement Learning and Demonstrations. arXiv 2017, arXiv:1709.10087. [Google Scholar]
- Haarnoja, T.; Pong, V.; Zhou, A.; Dalal, M.; Abbeel, P.; Levine, S. Composable Deep Reinforcement Learning for Robotic Manipulation. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 6244–6251. [Google Scholar]
- Zhu, H.; Gupta, A.; Rajeswaran, A.; Levine, S.; Kumar, V. Dexterous Manipulation with Deep Reinforcement Learning: Efficient, General, and Low-Cost. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 3651–3657. [Google Scholar]
- Huang, S.H.; Zambelli, M.; Kay, J.; Martins, M.F.; Tassa, Y.; Pilarski, P.M.; Hadsell, R. Learning Gentle Object Manipulation with Curiosity-Driven Deep Reinforcement Learning. arXiv 2019, arXiv:1903.08542. [Google Scholar]
- Levine, S.; Finn, C.; Darrell, T.; Abbeel, P. End-to-End Training of Deep Visuomotor Policies. arXiv 2015, arXiv:1504.00702. [Google Scholar]
- Pinto, L.; Gupta, A. Supersizing Self-supervision: Learning to Grasp from 50K Tries and 700 Robot Hours. arXiv 2015, arXiv:1509.06825. [Google Scholar]
- Levine, S.; Pastor, P.; Krizhevsky, A.; Quillen, D. Learning Hand-Eye Coordination for Robotic Grasping with Deep Learning and Large-Scale Data Collection. arXiv 2016, arXiv:1603.02199. [Google Scholar] [CrossRef]
- Popov, I.; Heess, N.; Lillicrap, T.P.; Hafner, R.; Barth-Maron, G.; Vecerík, M.; Lampe, T.; Tassa, Y.; Erez, T.; Riedmiller, M.A. Data-efficient Deep Reinforcement Learning for Dexterous Manipulation. arXiv 2017, arXiv:1704.03073. [Google Scholar]
- Kalashnikov, D.; Irpan, A.; Pastor, P.; Ibarz, J.; Herzog, A.; Jang, E.; Quillen, D.; Holly, E.; Kalakrishnan, M.; Vanhoucke, V.; et al. QT-Opt: Scalable Deep Reinforcement Learning for Vision-Based Robotic Manipulation. arXiv 2018, arXiv:1806.10293. [Google Scholar]
- Gu, S.; Holly, E.; Lillicrap, T.; Levine, S. Deep reinforcement learning for robotic manipulation with asynchronous off-policy updates. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Marina Bay Sands, Singapore, Singapore, 29 May–3 June 2017; pp. 3389–3396. [Google Scholar]
- Tsurumine, Y.; Cui, Y.; Uchibe, E.; Matsubara, T. Deep reinforcement learning with smooth policy update: Application to robotic cloth manipulation. Robot. Auton. Syst. 2019, 112, 72–83. [Google Scholar] [CrossRef]
- Jangir, R.; Alenya, G.; Torras, C. Dynamic Cloth Manipulation with Deep Reinforcement Learning. arXiv 2019, arXiv:1910.14475. [Google Scholar]
- de Bruin, T.; Kober, J.; Tuyls, K.; Babuška, R. Improved deep reinforcement learning for robotics through distribution-based experience retention. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 3947–3952. [Google Scholar]
- Özalp, R.; Kaymak, C.; Yildirum, Ö.; Ucar, A.; Demir, Y.; Güzeliş, C. An Implementation of Vision Based Deep Reinforcement Learning for Humanoid Robot Locomotion. In Proceedings of the 2019 IEEE International Symposium on INnovations in Intelligent SysTems and Applications (INISTA), Sofia, Bulgaria, 3–5 July 2019; pp. 1–5. [Google Scholar]
- Danel, M. Reinforcement learning for humanoid robot control. POSTER May 2017. [Google Scholar]
- Haarnoja, T.; Zhou, A.; Ha, S.; Tan, J.; Tucker, G.; Levine, S. Learning to Walk via Deep Reinforcement Learning. arXiv 2018, arXiv:1812.11103. [Google Scholar]
- Christiano, P.F.; Leike, J.; Brown, T.; Martic, M.; Legg, S.; Amodei, D. Deep Reinforcement Learning from Human Preferences. In Advances in Neural Information Processing Systems 30; Guyon, I., Luxburg, U.V., Bengio, S., Wallach, H., Fergus, R., Vishwanathan, S., Garnett, R., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2017; pp. 4299–4307. [Google Scholar]
- Brockman, G.; Cheung, V.; Pettersson, L.; Schneider, J.; Schulman, J.; Tang, J.; Zaremba, W. Openai gym. arXiv 2016, arXiv:1606.01540. [Google Scholar]
- Peng, X.B.; Berseth, G.; Yin, K.; Van De Panne, M. DeepLoco: Dynamic Locomotion Skills Using Hierarchical Deep Reinforcement Learning. ACM Trans. Graph. 2017, 36. [Google Scholar] [CrossRef]
- Berseth, G.; Xie, C.; Cernek, P.; Van de Panne, M. Progressive reinforcement learning with distillation for multi-skilled motion control. arXiv 2018, arXiv:1802.04765. [Google Scholar]
- Nagabandi, A.; Kahn, G.; Fearing, R.S.; Levine, S. Neural Network Dynamics for Model-Based Deep Reinforcement Learning with Model-Free Fine-Tuning. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 7559–7566. [Google Scholar]
- Duan, Y.; Chen, X.; Houthooft, R.; Schulman, J.; Abbeel, P. Benchmarking deep reinforcement learning for continuous control. In Proceedings of the International Conference on Machine Learning, New York, NY, USA, 20–22 June 2016; pp. 1329–1338. [Google Scholar]
- Xie, Z.; Berseth, G.; Clary, P.; Hurst, J.; van de Panne, M. Feedback Control For Cassie With Deep Reinforcement Learning. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1241–1246. [Google Scholar]
- Tan, J.; Zhang, T.; Coumans, E.; Iscen, A.; Bai, Y.; Hafner, D.; Bohez, S.; Vanhoucke, V. Sim-to-Real: Learning Agile Locomotion For Quadruped Robots. arXiv 2018, arXiv:1804.10332. [Google Scholar]
- Huang, Y.; Wei, G.; Wang, Y. V-D D3QN: The Variant of Double Deep Q-Learning Network with Dueling Architecture. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 9130–9135. [Google Scholar]
- Peng, X.B.; Berseth, G.; Van de Panne, M. Terrain-adaptive locomotion skills using deep reinforcement learning. ACM Trans. Graph. (TOG) 2016, 35, 1–12. [Google Scholar] [CrossRef]
- Heess, N.; Wayne, G.; Tassa, Y.; Lillicrap, T.P.; Riedmiller, M.A.; Silver, D. Learning and Transfer of Modulated Locomotor Controllers. arXiv 2016, arXiv:1610.05182. [Google Scholar]
- Haarnoja, T.; Tang, H.; Abbeel, P.; Levine, S. Reinforcement Learning with Deep Energy-Based Policies. arXiv 2017, arXiv:1702.08165. [Google Scholar]
- Pinto, L.; Davidson, J.; Sukthankar, R.; Gupta, A. Robust Adversarial Reinforcement Learning. arXiv 2017, arXiv:1703.02702. [Google Scholar]
- Verma, S.; Novati, G.; Koumoutsakos, P. Efficient collective swimming by harnessing vortices through deep reinforcement learning. Proc. Natl. Acad. Sci. USA 2018, 115, 5849–5854. [Google Scholar] [CrossRef] [Green Version]
- Zhang, M.; Geng, X.; Bruce, J.; Caluwaerts, K.; Vespignani, M.; SunSpiral, V.; Abbeel, P.; Levine, S. Deep reinforcement learning for tensegrity robot locomotion. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, Singapore, 29 May–3 June 2017; pp. 634–641. [Google Scholar]
- Luo, J.; Edmunds, R.; Rice, F.; Agogino, A.M. Tensegrity Robot Locomotion Under Limited Sensory Inputs via Deep Reinforcement Learning. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 6260–6267. [Google Scholar]
- Wikipedia. Robotics Simulator. Available online: https://en.wikipedia.org/wiki/Robotics_simulator (accessed on 1 July 2021).
- Obst, O.; Rollmann, M. Spark—A Generic Simulator for Physical Multi-Agent Simulations. In Multiagent System Technologies. MATES 2004; Lecture Notes in Computer Science; Springer: Berlin, Heidelberg, 2004; Volume 3187. [Google Scholar] [CrossRef]
- Wang, W.Y.; Li, J.; He, X. Deep reinforcement learning for NLP. In Proceedings of the 56th Annual Meeting of the Association for Computational Linguistics: Tutorial Abstracts, Melbourne, Australia, 15–20 July 2018; pp. 19–21. [Google Scholar]
- Sharma, A.R.; Kaushik, P. Literature survey of statistical, deep and reinforcement learning in natural language processing. In Proceedings of the 2017 International Conference on Computing, Communication and Automation (ICCCA), Greater Noida, India, 5–6 May 2017; pp. 350–354. [Google Scholar]
- Xiong, C. Recent Progress in Deep Reinforcement Learning for Computer Vision and NLP. In Proceedings of the 2017 Workshop on Recognizing Families in the Wild, RFIW ’17, New York, NY, USA, 27 October 2017; Association for Computing Machinery. p. 1. [Google Scholar] [CrossRef]
- Lapan, M. Deep Reinforcement Learning Hands-On: Apply Modern RL Methods, with Deep Q-Networks, Value Iteration, Policy Gradients, TRPO, AlphaGo Zero and More; Packt Publishing Ltd.: Birmingham, UK, 2018. [Google Scholar]
- Gao, J.; Galley, M.; Li, L. Neural approaches to conversational AI. In Proceedings of the 41st International ACM SIGIR Conference on Research & Development in Information Retrieval, Ann Arbor, MI, USA, 8–12 July 2018; pp. 1371–1374. [Google Scholar]
- Wu, L.; Tian, F.; Qin, T.; Lai, J.; Liu, T. A Study of Reinforcement Learning for Neural Machine Translation. arXiv 2018, arXiv:1808.08866. [Google Scholar]
- He, D.; Xia, Y.; Qin, T.; Wang, L.; Yu, N.; Liu, T.Y.; Ma, W.Y. Dual Learning for Machine Translation. In Advances in Neural Information Processing Systems 29; Lee, D.D., Sugiyama, M., Luxburg, U.V., Guyon, I., Garnett, R., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2016; pp. 820–828. [Google Scholar]
- Satija, H.; Pineau, J. Simultaneous machine translation using deep reinforcement learning. In Proceedings of the ICML 2016 Workshop on Abstraction in Reinforcement Learning, International Conference on Machine Learning, New York, NY, USA, 19–24 June 2016. [Google Scholar]
- Klein, G.; Kim, Y.; Deng, Y.; Senellart, J.; Rush, A.M. OpenNMT: Open-Source Toolkit for Neural Machine Translation. arXiv 2017, arXiv:1701.02810. [Google Scholar]
- Zhang, J.; Ding, Y.; Shen, S.; Cheng, Y.; Sun, M.; Luan, H.; Liu, Y. THUMT: An Open Source Toolkit for Neural Machine Translation. arXiv 2017, arXiv:1706.06415. [Google Scholar]
- Yang, Z.; Chen, W.; Wang, F.; Xu, B. Improving Neural Machine Translation with Conditional Sequence Generative Adversarial Nets. arXiv 2017, arXiv:1703.04887. [Google Scholar]
- Wu, L.; Xia, Y.; Tian, F.; Zhao, L.; Qin, T.; Lai, J.; Liu, T.Y. Adversarial neural machine translation. In Proceedings of the 10th Asian Conference on Machine Learning, PMLR, Beijing, China, 14–16 November 2018; pp. 534–549. [Google Scholar]
- Jurafsky, D.; Martin, J.H. Speech & Language Processing—Third Edition Draft; Pearson Education India: New Delhi, India, 2019. [Google Scholar]
- Cuayáhuitl, H.; Renals, S.; Lemon, O.; Shimodaira, H. Evaluation of a hierarchical reinforcement learning spoken dialogue system. Comput. Speech Lang. 2010, 24, 395–429. [Google Scholar] [CrossRef] [Green Version]
- Cuayáhuitl, H.; Dethlefs, N. Spatially-aware dialogue control using hierarchical reinforcement learning. Acm Trans. Speech Lang. Process. (TSLP) 2011, 7, 1–26. [Google Scholar] [CrossRef]
- Cuayáhuitl, H.; Kruijff-Korbayová, I.; Dethlefs, N. Nonstrict hierarchical reinforcement learning for interactive systems and robots. Acm Trans. Interact. Intell. Syst. (TiiS) 2014, 4, 1–30. [Google Scholar] [CrossRef] [Green Version]
- Cuayáhuitl, H.; Keizer, S.; Lemon, O. Strategic Dialogue Management via Deep Reinforcement Learning. arXiv 2015, arXiv:1511.08099. [Google Scholar]
- Cuayáhuitl, H. SimpleDS: A Simple Deep Reinforcement Learning Dialogue System. In Dialogues with Social Robots: Enablements, Analyses, and Evaluation; Jokinen, K., Wilcock, G., Eds.; Springer Singapore: Singapore, 2017; pp. 109–118. [Google Scholar] [CrossRef] [Green Version]
- Cuayáhuitl, H.; Yu, S. Deep reinforcement learning of dialogue policies with less weight updates. In Poceedings of the Interspeech 2017, Stockholm, Sweden, 20–24 August 2017. [Google Scholar]
- Cuayáhuitl, H.; Lee, D.; Ryu, S.; Cho, Y.; Choi, S.; Indurthi, S.; Yu, S.; Choi, H.; Hwang, I.; Kim, J. Ensemble-based deep reinforcement learning for chatbots. Neurocomputing 2019, 366, 118–130. [Google Scholar] [CrossRef] [Green Version]
- Jaques, N.; Ghandeharioun, A.; Shen, J.H.; Ferguson, C.; Lapedriza, À.; Jones, N.; Gu, S.; Picard, R.W. Way Off-Policy Batch Deep Reinforcement Learning of Implicit Human Preferences in Dialog. arXiv 2019, arXiv:1907.00456. [Google Scholar]
- Ranzato, M.; Chopra, S.; Auli, M.; Zaremba, W. Sequence level training with recurrent neural networks. arXiv 2015, arXiv:1511.06732. [Google Scholar]
- Williams, R.J. Simple statistical gradient-following algorithms for connectionist reinforcement learning. Mach. Learn. 1992, 8, 229–256. [Google Scholar] [CrossRef] [Green Version]
- Bahdanau, D.; Brakel, P.; Xu, K.; Goyal, A.; Lowe, R.; Pineau, J.; Courville, A.; Bengio, Y. An actor-critic algorithm for sequence prediction. arXiv 2016, arXiv:1607.07086. [Google Scholar]
- Yu, L.; Zhang, W.; Wang, J.; Yu, Y. Seqgan: Sequence generative adversarial nets with policy gradient. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017. [Google Scholar]
- Li, Z.; Jiang, X.; Shang, L.; Li, H. Paraphrase Generation with Deep Reinforcement Learning. arXiv 2017, arXiv:1711.00279. [Google Scholar]
- Zhang, X.; Lapata, M. Sentence simplification with deep reinforcement learning. arXiv 2017, arXiv:1703.10931. [Google Scholar]
- Li, J.; Monroe, W.; Ritter, A.; Jurafsky, D.; Galley, M.; Gao, J. Deep Reinforcement Learning for Dialogue Generation. In Proceedings of the 2016 Conference on Empirical Methods in Natural Language Processing, Austin, TX, USA, 1–4 November 2016. [Google Scholar] [CrossRef] [Green Version]
- Sutskever, I.; Vinyals, O.; Le, Q.V. Sequence to sequence learning with neural networks. arXiv 2014, arXiv:1409.3215. [Google Scholar]
- Dhingra, B.; Li, L.; Li, X.; Gao, J.; Chen, Y.; Ahmed, F.; Deng, L. End-to-End Reinforcement Learning of Dialogue Agents for Information Access. arXiv 2016, arXiv:1609.00777. [Google Scholar]
- Keizer, S.; Guhe, M.; Cuayáhuitl, H.; Efstathiou, I.; Engelbrecht, K.P.; Dobre, M.; Lascarides, A.; Lemon, O. Evaluating Persuasion Strategies and Deep Reinforcement Learning Methods for Negotiation Dialogue Agents. ACL. In Proceedings of the 15th Conference of the European chapter of the Association for Computational Linguistics, Valencia, Spain, 3–7 April 2017. [Google Scholar]
- Ilievski, V.; Musat, C.; Hossmann, A.; Baeriswyl, M. Goal-Oriented Chatbot Dialog Management Bootstrapping with Transfer Learning. arXiv 2018, arXiv:1802.00500. [Google Scholar]
- Ciou, P.H.; Hsiao, Y.T.; Wu, Z.Z.; Tseng, S.H.; Fu, L.C. Composite reinforcement learning for social robot navigation. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 2553–2558. [Google Scholar]
- Das, A.; Kottur, S.; Moura, J.M.; Lee, S.; Batra, D. Learning cooperative visual dialog agents with deep reinforcement learning. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2951–2960. [Google Scholar]
- Strub, F.; De Vries, H.; Mary, J.; Piot, B.; Courville, A.; Pietquin, O. End-to-end optimization of goal-driven and visually grounded dialogue systems. arXiv 2017, arXiv:1703.05423. [Google Scholar]
- Liu, S.; Zhu, Z.; Ye, N.; Guadarrama, S.; Murphy, K. Improved Image Captioning via Policy Gradient Optimization of SPIDEr. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017. [Google Scholar]
- Xu, K.; Ba, J.; Kiros, R.; Cho, K.; Courville, A.; Salakhudinov, R.; Zemel, R.; Bengio, Y. Show, attend and tell: Neural image caption generation with visual attention. In Proceedings of the International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 2048–2057. [Google Scholar]
- Lu, J.; Xiong, C.; Parikh, D.; Socher, R. Knowing When to Look: Adaptive Attention via A Visual Sentinel for Image Captioning. arXiv 2016, arXiv:1612.01887. [Google Scholar]
- Ren, Z.; Wang, X.; Zhang, N.; Lv, X.; Li, L.J. Deep Reinforcement Learning-Based Image Captioning With Embedding Reward. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Wang, X.; Chen, W.; Wang, Y.; Wang, W.Y. No Metrics Are Perfect: Adversarial Reward Learning for Visual Storytelling. arXiv 2018, arXiv:1804.09160. [Google Scholar]
- Wang, X.; Chen, W.; Wu, J.; Wang, Y.F.; Wang, W.Y. Video Captioning via Hierarchical Reinforcement Learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Pasunuru, R.; Bansal, M. Reinforced video captioning with entailment rewards. arXiv 2017, arXiv:1708.02300. [Google Scholar]
- Liang, X.; Lee, L.; Xing, E.P. Deep variation-structured reinforcement learning for visual relationship and attribute detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 848–857. [Google Scholar]







| DRL Algorithms | Main Techniques | |
|---|---|---|
| Value-based | DQN [6] | Experience Replay, Target Network, Clipping Rewards, Clipping Rewards, and Skipping Frames |
| Double DQN [8] | Double Q-learning | |
| Dueling DQN [11] | Dueling Neural Network architecture | |
| Prioritized DQN [10] | Prioritized experience replay | |
| Bootstrapped DQN [25] | Deep exploration with DNNs | |
| Distributional DQN [12] | Distributional Bellman equation | |
| Noisy DQN [13] | Parametric noise added to weights | |
| Rainbow DQN [14] | Combine 6 extensions to the DQN | |
| Hierarchical DQN [17] | Hierarchical value functions | |
| Gorila [16] | Asynchronous training for multi agents | |
| Policy-based | TRPO [18] | KL divergence constraint |
| PPO [19] | Specialized clipping in the objective function | |
| Actor-Critic | Deep DPG [21] | DNN and DPG |
| TD3 [26] | Twin Delayed DDPG | |
| PGQ [22] | Policy gradient and Q-learning | |
| Soft Actor Critic (SAC) [23] | Maximum entropy RL framework | |
| A3C [24] | Asynchronous Gradient Descent |
| Domains | Applications |
|---|---|
| Healthcare | DTRs, HER/EMR, diagnosis |
| Education | Educational games, recommendation, proficiency estimation |
| Transportation | Traffic control |
| Energy | Decision control |
| Finance | Trading, risk management |
| Science, Engineering, Art | Math, Physics, music, animation |
| Business management | Recommendation, customer management |
| Computer systems | Resourse management, security |
| Games | Board games, card games, video games |
| Robotics | Sim-to-real, control |
| Computer vision | Recognition, detection, perception |
| NLP | Sequence generation, translation, dialogue |
| Software | Developers | Main Language | Physics Engine | Robot Family |
|---|---|---|---|---|
| Gazabo | Open Source Robotics Foundation (OSRF) | C++ | ODE/Bullet/Sim-body/DART | UGV, UAV, AUV, humanoid, etc. |
| RoboDK | RoboDK | Python | Gravity plugin | Robot arms |
| SimSpark | [158] | C++, Ruby | ODE | UGV, humanoid, etc. |
| Webots | Cyberbotics Ltd. | C++ | Fork of ODE | UGV, UAV, AUV, humanoid, etc. |
| OpenRAVE | OpenRAVE Community | C++, Python | ODE/Bullet | UGV, humanoid, etc. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiang, X.; Foo, S. Recent Advances in Deep Reinforcement Learning Applications for Solving Partially Observable Markov Decision Processes (POMDP) Problems: Part 1—Fundamentals and Applications in Games, Robotics and Natural Language Processing. Mach. Learn. Knowl. Extr. 2021, 3, 554-581. https://0-doi-org.brum.beds.ac.uk/10.3390/make3030029
Xiang X, Foo S. Recent Advances in Deep Reinforcement Learning Applications for Solving Partially Observable Markov Decision Processes (POMDP) Problems: Part 1—Fundamentals and Applications in Games, Robotics and Natural Language Processing. Machine Learning and Knowledge Extraction. 2021; 3(3):554-581. https://0-doi-org.brum.beds.ac.uk/10.3390/make3030029
Chicago/Turabian StyleXiang, Xuanchen, and Simon Foo. 2021. "Recent Advances in Deep Reinforcement Learning Applications for Solving Partially Observable Markov Decision Processes (POMDP) Problems: Part 1—Fundamentals and Applications in Games, Robotics and Natural Language Processing" Machine Learning and Knowledge Extraction 3, no. 3: 554-581. https://0-doi-org.brum.beds.ac.uk/10.3390/make3030029