The Function Design for the Communication-Based Train Control (CBTC) System: How to Solve the Problems in the Underground Mine Rail Transportation?


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction: The Development of the Mining Industry and the CBTC System
2. The Concept and Design: The Function Design of the CBTC System
2.1. The Background of the Practical Problems
2.2. The Function Design of the CBTC System for the Solutions to the Practical Problems
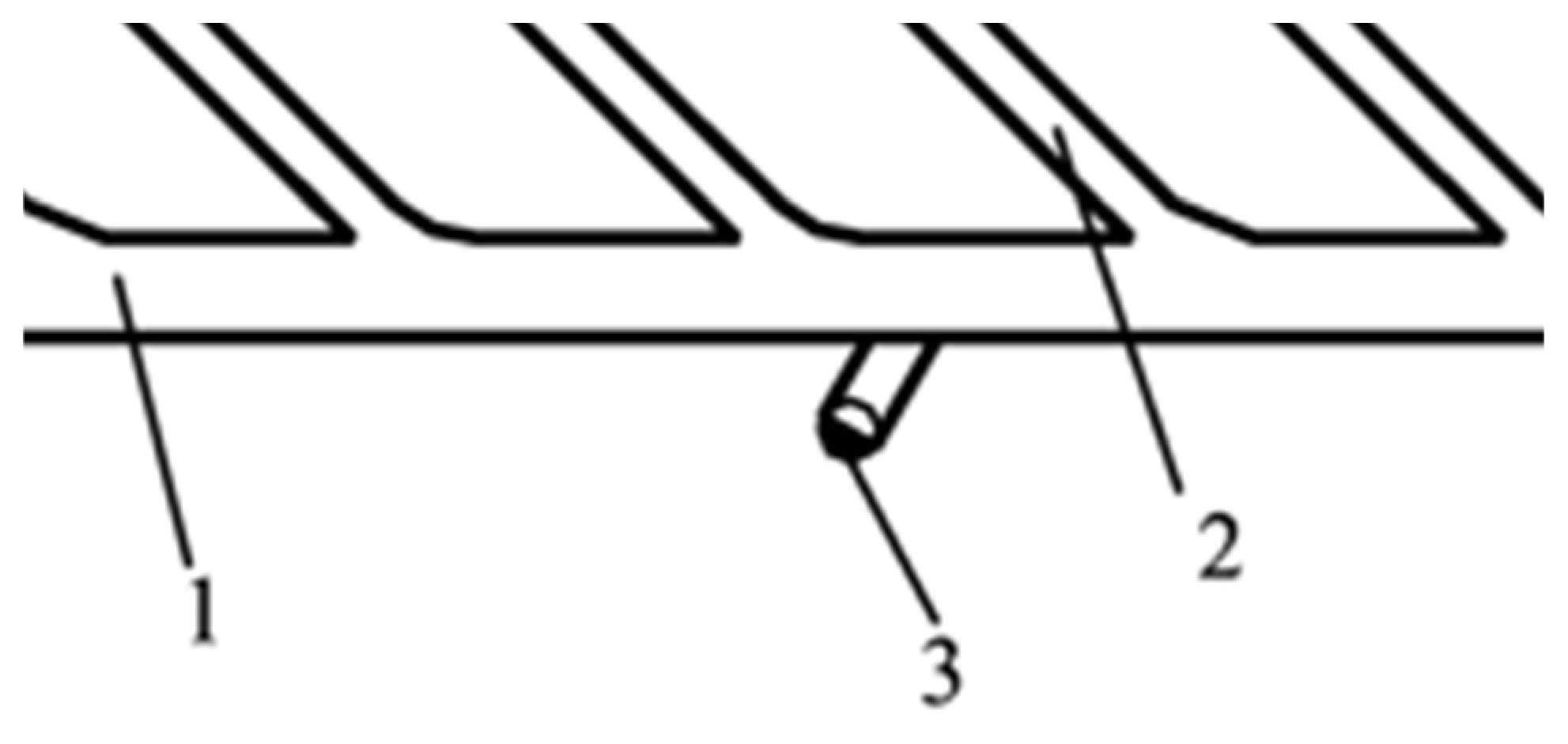
2.2.1. Safety Problem: The Rear-End Collision Problem
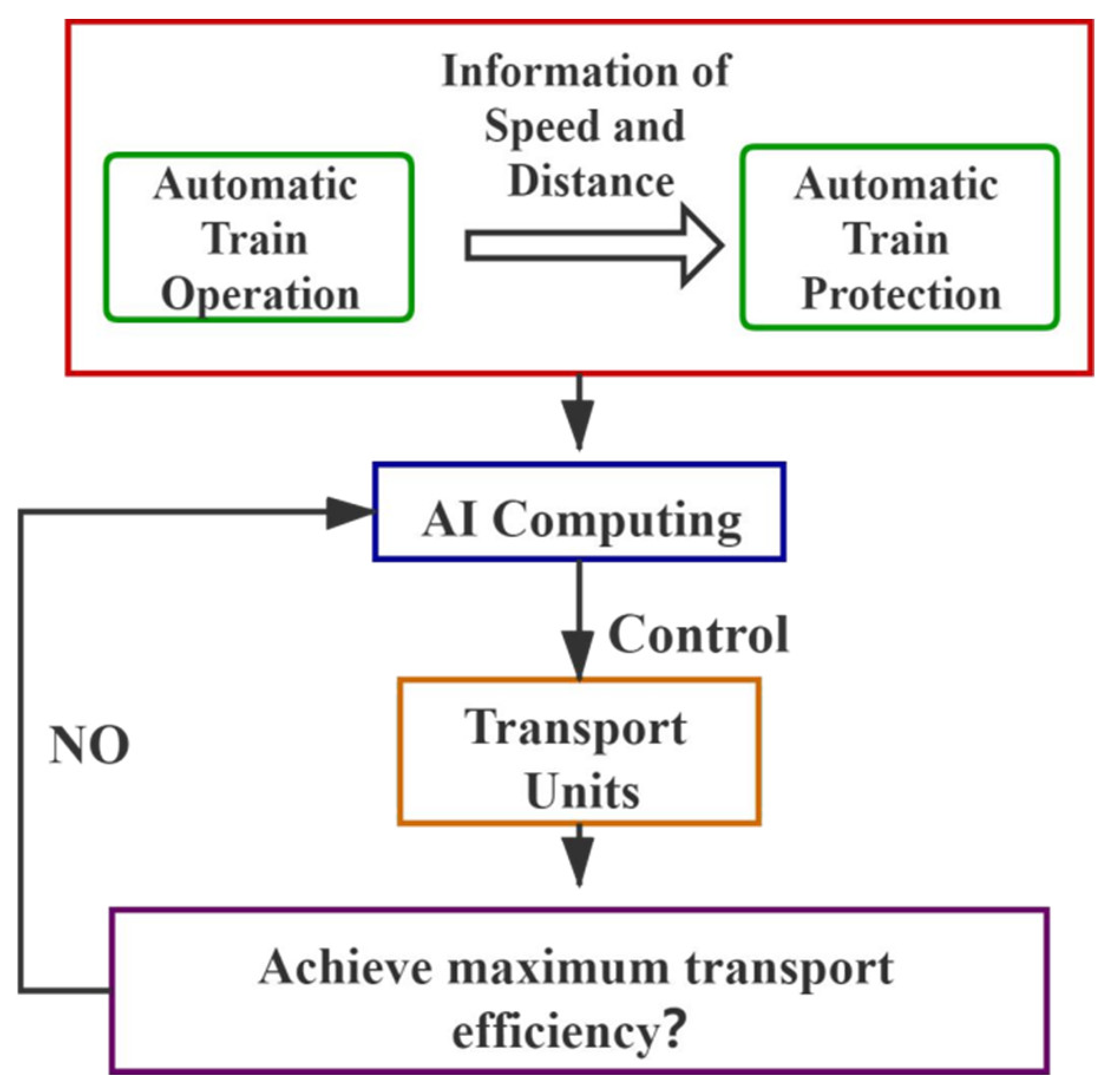
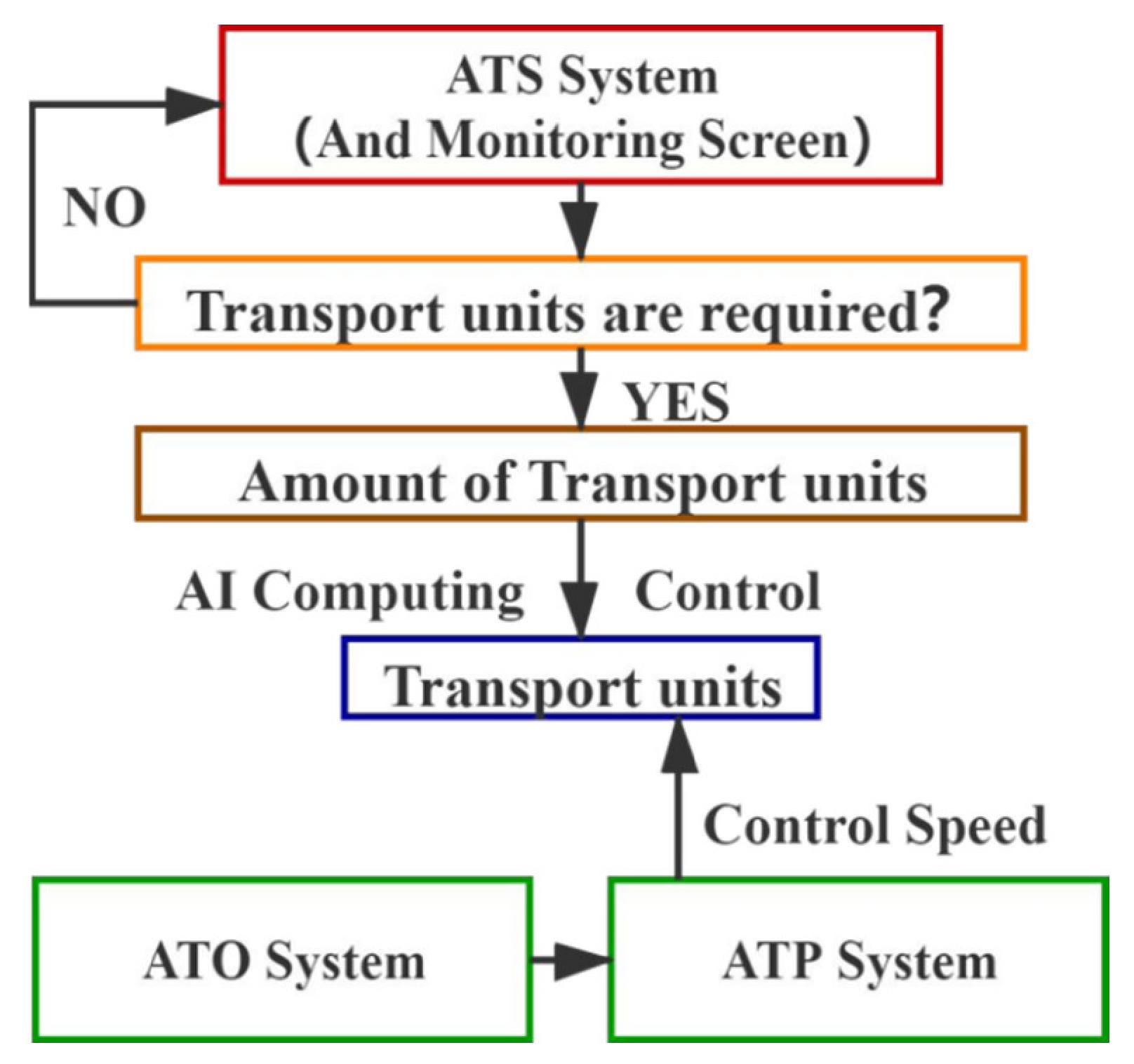
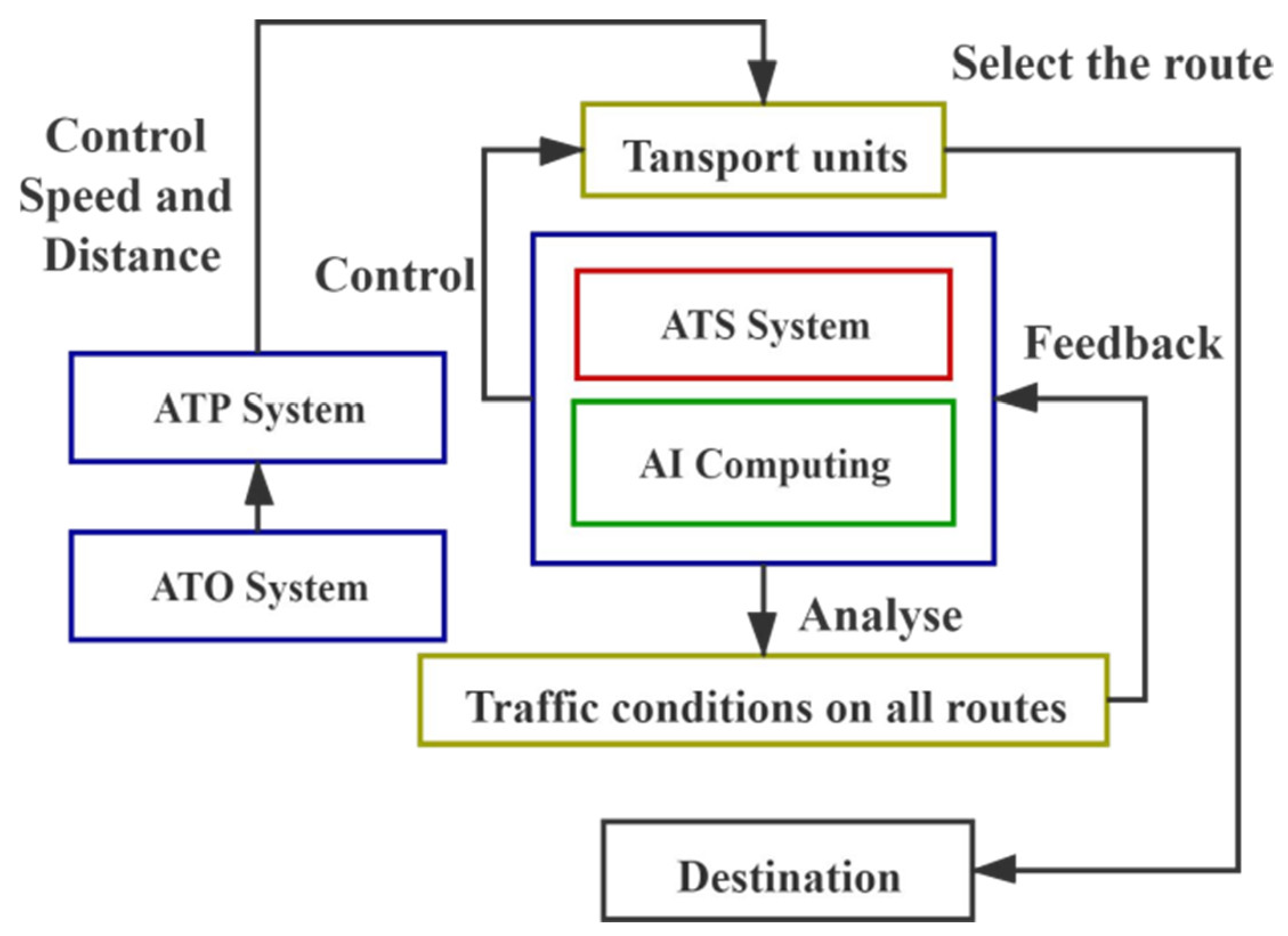
2.2.2. Efficiency Problem: The Transport Efficiency Problem
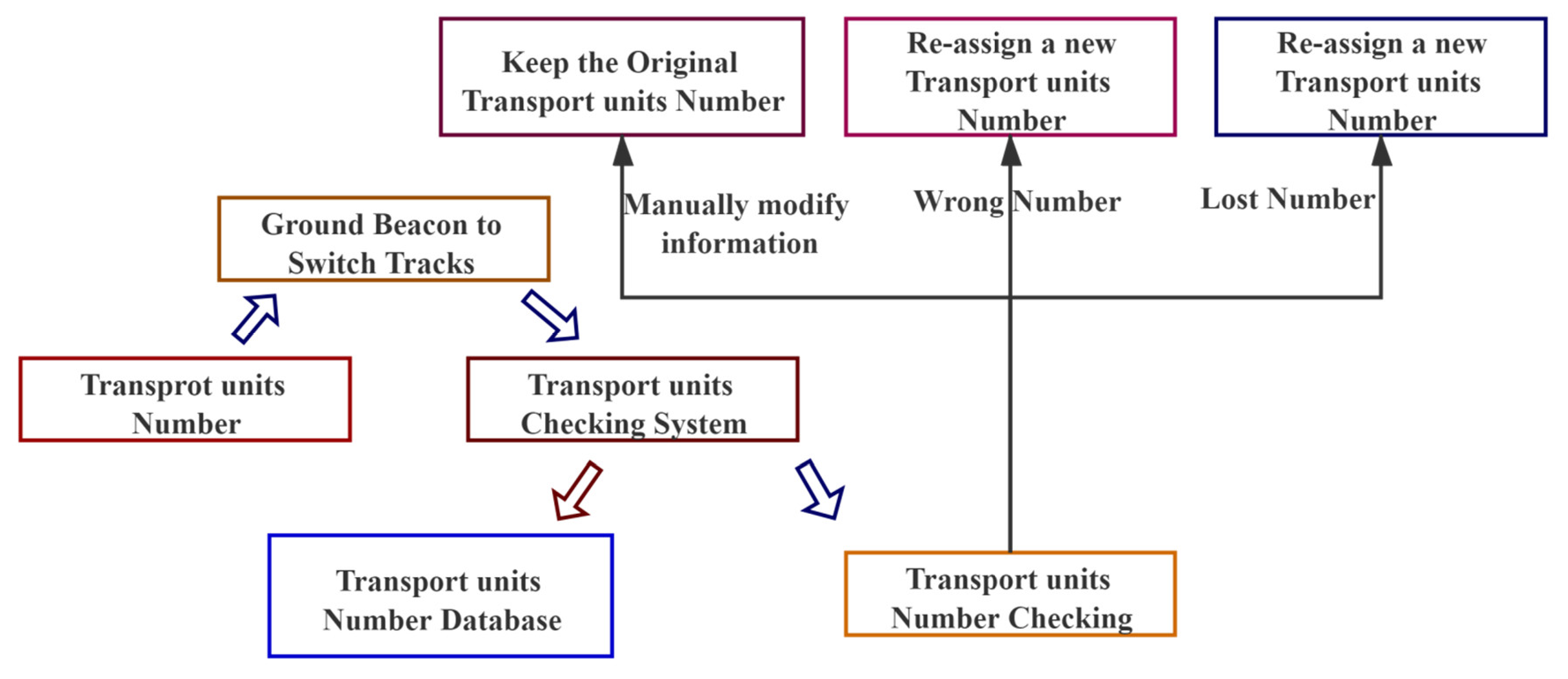
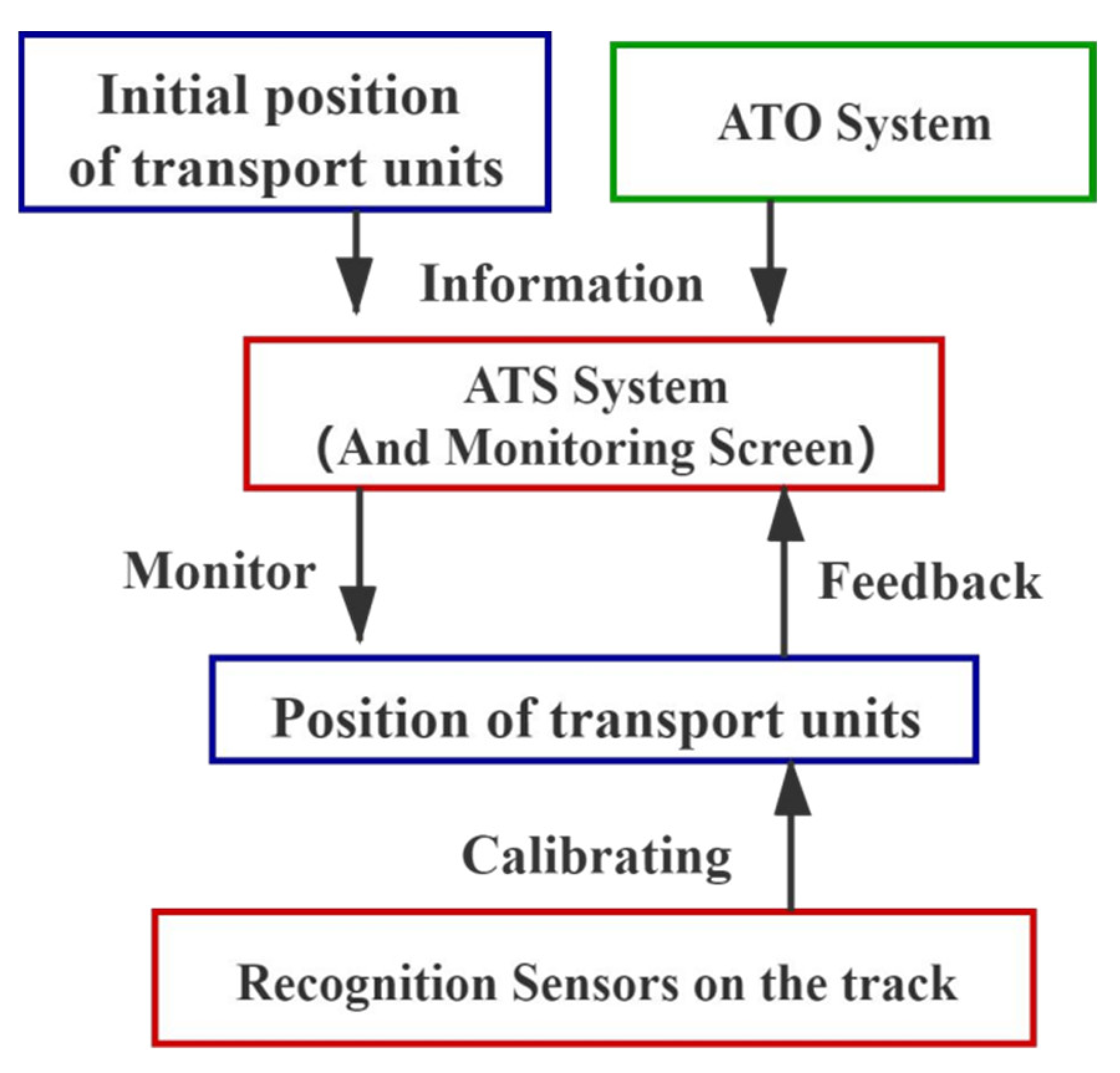
2.2.3. Monitoring and Control: The Real-Time Monitoring Problem
3. Future Work
- For the methods such as the Dynamic Fault Tree analysis method and the tracking equations, there is no further explanation of its depth and how it works with the CBTC system.
- Although the concept paper has made a lot of effort in theoretical research, there is no practical engineering application or practice to verify the practicability of the design.
4. Discussion and Outlook
5. Summary
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dong, L.; Sun, D.; Han, G.; Li, X.; Hu, Q.; Shu, L. Velocity-free localization of autonomous driverless vehicles in underground intelligent mines. IEEE Trans. Veh. Technol. 2020, 69, 9292–9303. [Google Scholar] [CrossRef]
- Chen, W.; Wang, X. Coal mine safety intelligent monitoring based on wireless sensor network. IEEE Sens. J. 2020. [Google Scholar] [CrossRef]
- Meng, Y.; Li, J. Research on intelligent configuration method of mine IoT communication resources based on data flow behavior. IEEE Access 2020, 8, 172065–172075. [Google Scholar] [CrossRef]
- MacLeod, I.; Stothert, A. Distributed intelligent control for a mine refrigeration system. IEEE Control. Syst. 1998, 18, 31–38. [Google Scholar] [CrossRef]
- Zheng, M.G.; Cai, S.J. An intelligent system for calculating the scale of rational, enlarged production of an underground non-ferrous metal mine. J. China Univ. Min. Technol. 2008, 18, 214–219. [Google Scholar] [CrossRef]
- Zhen, L. Underground coal mine ventilation monitoring system research. Appl. Mech. Mater. 2013, 353–356, 3085–3088. [Google Scholar] [CrossRef]
- Farooq, J.; Bro, L.; Karstensen, R.T.; Soler, J. Performance evaluation of a Multi-radio, Multi-hop Ad-hoc radio communication network for Communi-cations-Based Train Control (CBTC). IEEE Trans. Veh. Technol. 2018, 67, 56–71. [Google Scholar] [CrossRef] [Green Version]
- Farooq, J.; Soler, J. Radio communication for Communications-Based Train Control (CBTC): A tutorial and survey. IEEE Commun. Surv. Tutor. 2017, 19, 1377–1402. [Google Scholar] [CrossRef] [Green Version]
- IEEE Standard for User Interface Requirements in Communications-Based Train Control (CBTC) Systems. In IEEE Std 1474.2-2003; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2008; pp. 1–19.
- IEEE Standard for Communications-Based Train Control (CBTC) Performance and Functional Requirements. In IEEE Std 1474.1-2004 (Revision of IEEE Std 1474.1-1999; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2008; pp. 1–45.
- Vantuono, W.C. CBTC--and beyond: Looking at CBTC not only as a train control system, but also in the context of an overall information, communication, monitoring, control, and management strategy. Railw. Age 2003, 204, 65. [Google Scholar]
- Alexander, R.P.; Mortlock, E.A. Controlling and Executing Communications Based Train Control (CBTC) Installation and Testing With a CBTC-Ready Vehicle. In Proceedings of the ASME/IEEE 2005 Joint Rail Conference, Pueblo, CO, USA, 16–18 March 2005; pp. 193–198. [Google Scholar]
- Chen, R.; Guo, J. Development of the new CBTC system simulation and performance analysis. Comput. Railw. XII 2010, 114, 497–507. [Google Scholar] [CrossRef] [Green Version]
- Xie, Y.; Tang, T. Performance analysis of communication network for the CBTC system. In Proceedings of the 2009 IEEE Intelligent Vehicles Symposium , Xi’an, China, 3–5 June 2009; pp. 1072–1077. [Google Scholar] [CrossRef]
- Bu, B.; Yang, J.; Wen, S.; Zhu, L. Predictive function control for Communication-Based Train Control (CBTC) systems. Int. J. Adv. Robot. Syst. 2013, 10, 79. [Google Scholar] [CrossRef] [Green Version]
- Zhu, L.; Yu, F.R.; Ning, B.; Tang, T. Communication-Based Train Control (CBTC) systems with cooperative relaying: Design and performance analysis. IEEE Trans. Veh. Technol. 2013, 63, 2162–2172. [Google Scholar] [CrossRef]
- Wang, H.; Yu, F.R.; Jiang, H. Modeling of radio channels with leaky coaxial cable for LTE-M based CBTC systems. IEEE Commun. Lett. 2016, 20, 1038–1041. [Google Scholar] [CrossRef]
- Wang, X.; Liu, L.; Zhu, L.; Tang, T. Joint security and QoS provisioning in Train-Centric CBTC systems under sybil attacks. IEEE Access 2019, 7, 91169–91182. [Google Scholar] [CrossRef]
- Liu, J.; Qian, L.; Zhang, Y.; Han, J.; Sun, J. Towards safety-risk prediction of CBTC systems with deep learning and formal methods. IEEE Access 2020, 8, 16618–16626. [Google Scholar] [CrossRef]
- Wang, X.; Liu, L.; Zhu, L.; Tang, T. Train-Centric CBTC meets age of information in Train-to-Train communications. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4072–4085. [Google Scholar] [CrossRef]
- Wang, H.; Zhao, N.; Chen, L. An integrated capacity evaluation method for CBTC- system-equipped urban rail lines. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2013, 229, 291–302. [Google Scholar] [CrossRef]
- Sun, W.; Yu, F.R.; Tang, T.; You, S. A Cognitive control method for cost-efficient CBTC systems with smart grids. IEEE Trans. Intell. Transp. Syst. 2016, 18, 568–582. [Google Scholar] [CrossRef]
- Si, X.; Kuang, W.; Li, Q. A method of generating engineering test sequence for urban rail transit CBTC system based on formalization. IOP Conf. Ser. Earth Environ. Sci. 2020, 526, 12192. [Google Scholar] [CrossRef]
- Zhu, L.; Li, Y.; Yu, F.R.; Ning, B.; Tang, T.; Wang, X. Cross-layer defense methods for jamming-resistant CBTC systems. IEEE Trans. Intell. Transp. Syst. 2020, 1–13. [Google Scholar] [CrossRef]
- Wen, T.; Constantinou, C.; Chen, L.; Tian, Z.; Roberts, C. Access point deployment optimization in CBTC data communication system. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1985–1995. [Google Scholar] [CrossRef]
- Wang, H.; Yu, F.R.; Zhu, L.; Tang, T.; Ning, B. Finite-state markov modeling of leaky waveguide channels in Communication-Based Train Control (CBTC) systems. IEEE Commun. Lett. 2013, 17, 1408–1411. [Google Scholar] [CrossRef]
- Carvajal-Carreño, W.; Cucala, A.P.; Fernández-Cardador, A. Fuzzy train tracking algorithm for the energy efficient operationof CBTC equipped metro lines. Eng. Appl. Artif. Intell. 2016, 53, 19–31. [Google Scholar] [CrossRef]
- Bin, N.; Tao, T.; Min, Q.K.; Hai, G.C. CBTC (Communication Based Train Control): System and Development. In Geo-Environment and Landscape Evolution III; Witpress LTD.: Southampton, UK, 2006; Volume 88. [Google Scholar]
- Wang, H.; Yu, F.R.; Zhu, L.; Tang, T.; Ning, B. Finite-state Markov modeling for wireless channels in tunnel communication-based train control systems. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1083–1090. [Google Scholar] [CrossRef]
- Briginshaw, D. Can CBTC cope with complex rail networks? Int. Railw. J. 2014, 54, 2. [Google Scholar]
- Aziminejad, A.; Lee, A.W.; Epelbaum, G. Underground communication: Radio propagation prediction for CBTC data communication subsystem design. IEEE Veh. Technol. Mag. 2015, 10, 71–79. [Google Scholar] [CrossRef]
- Circle Line junction CBTC. Railw. Gaz. Int. 2019, 175, 13.
- Dash, A.K.; Bhattcharjee, R.; Paul, P.; Tikader, M. Study and analysis of accidents due to wheeled trackless transportation machinery in indian coal mine—Identification of gap in current investigation system. Procedia Earth Planet. Sci. 2015, 11, 539–547. [Google Scholar] [CrossRef] [Green Version]
- Gao, P.; Liu, C.; Dong, H.; Zheng, W. A Dynamic Fault Tree Based CBTC Onboard ATP System Safety Analysis Method. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–7. [Google Scholar]
- Wu, W.; Bu, B. Security analysis for CBTC systems under attack–defense confrontation. Electronics 2019, 8, 991. [Google Scholar] [CrossRef] [Green Version]
- Xue, J.; Wei, L.M. Research on Intelligent Track Positioning System to the Mine Accident Rescue. In Proceedings of the World Automation Congress, Puerto Vallarta, Mexico, 24–28 June 2012; pp. 1–3. [Google Scholar]
- Gurník, P. Next Generation Train Control (NGTC): More effective railways through the convergence of main-line and urban train control systems. Transp. Res. Procedia 2016, 14, 1855–1864. [Google Scholar] [CrossRef]
- Feng, X.; Qian, J.; Sun, Z.; Wang, X. Wireless Mobile Monitoring System for Tram Rail Transport in Underground Coal Mine Based on WMN. In Proceedings of the 2010 International Conference on Computational Aspects of Social Networks, Taiyuan, China, 26–28 September 2010; pp. 452–455. [Google Scholar]
- Ali, M.M.; Youhei, K.; Mostafa, S.; Knox, C.E.; Markus, W.; Hyongdoo, J.; Hirokazu, O. Development of underground mine monitoring and communication system integrated ZigBee and GIS. Int. J. Min. Sci. Technol. 2015, 25, 811–818. [Google Scholar]
- Mazzanti, F.; Ferrari, A. Ten Diverse Formal Models for a CBTC Automatic Train Supervision System. In Proceedings of the Electronic Proceedings in Theoretical Computer Science; Open Publishing Association: The Hague, The Netherlands, 2018; Volume 268, pp. 104–149. [Google Scholar]
- Anjomshoa, H.; Albrecht, A.; Lee, D.H.; Pudney, P. Optimising passing bay locations and vehicle schedules in underground mines. J. Oper. Res. Soc. 2013, 64, 241–249. [Google Scholar] [CrossRef]
- Georgescu, M.P. Driverless CBTC—Specific requirements for CBTC systems to overcome operation challenges. Geo-Environ. Landsc. Evol. III 2006, 88. [Google Scholar] [CrossRef] [Green Version]
- Gamache, M.; Grimard, R.; Cohen, P. A shortest-path algorithm for solving the fleet management problem in underground mines. Eur. J. Oper. Res. 2005, 166, 497–506. [Google Scholar] [CrossRef]
- Li, M.; Liu, Y. Underground coal mine monitoring with wireless sensor networks. ACM Trans. Sens. Netw. 2009, 5, 1–29. [Google Scholar] [CrossRef] [Green Version]
- Jukna, S.; Schnitger, G. On the optimality of Bellman–Ford–Moore shortest path algorithm. Theor. Comput. Sci. 2016, 628, 101–109. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, J.; Qiu, A.; Qian, X.; Zhang, F. The shortest path approximation algorithm for large scale road network. Acta Geod. Cartogr. Sin. 2019, 48, 86. [Google Scholar]
- Franceschetti, A.; Honhon, D.; Laporte, G.; Van Woensel, T. A Shortest-Path algorithm for the departure time and speed optimization problem. Transp. Sci. 2018, 52, 756–768. [Google Scholar] [CrossRef] [Green Version]
- Oh, S.; Yoon, Y.; Kim, K.; Kim, Y. Design of ATP Functions and Communication Interface Specifications for Korean Radio-Based Train Control System. In Proceedings of the 2013 13th International Conference on Control, Automation and Systems (ICCAS 2013), Gwangju, Korea, 20–23 October 2013; pp. 1330–1333. [Google Scholar]
- Mao, Z.; Tao, G.; Jiang, B.; Yan, X.-G. Adaptive actuator compensation of position tracking for high-speed trains with disturbances. IEEE Trans. Veh. Technol. 2018, 67, 5706–5717. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Wang, G.; Yu, H.; Wang, X. Engineering Project: The Method to Solve Practical Problems for the Monitoring and Control of Driver-Less Electric Transport Vehicles in the Underground Mines. World Electr. Veh. J. 2021, 12, 64. [Google Scholar] [CrossRef]
- Di Nardo, M.; Clericuzio, M.; Murino, T.; Madonna, M. An adaptive resilience approach for a high capacity railway. Int. Rev. Civ. Eng. 2020, 11, 98. [Google Scholar] [CrossRef]
- Di Nardo, M.; Madonna, M.; Santillo, L.C. Safety management system: A system dynamics approach to manage risks in a process plant. Int. Rev. Model. Simul. IREMOS 2016, 9. [Google Scholar] [CrossRef]
- Di Nardo, M.; Gallo, M.; Murino, T.; Santillo, L. System dynamics simulation for fire and explosion risk analysis in home environment. Int. Rev. Model. Simul. IREMOS 2017, 10. [Google Scholar] [CrossRef]
- Di Nardo, M.; Madonna, M.; Murino, T.; Castagna, F. Modelling a safety management system using system dynamics at the bhopal incident. Appl. Sci. 2020, 10, 903. [Google Scholar] [CrossRef] [Green Version]
- Di Nardo, M.; Clericuzio, M.; Murino, T.; Sepe, C. An economic order quantity stochastic dynamic optimi-zation model in a logistic 4.0 environment. Sustainability 2020, 12, 4075. [Google Scholar] [CrossRef]
- Muñoz, A.; Gonzalez, J.; Maña, A. A Performance-Oriented Monitoring System for Security Properties in Cloud Computing Applications. Comput. J. 2012, 55, 979–994. [Google Scholar] [CrossRef]
- Toutouh, J.; Muñoz, A.; Nesmachnow, S. Evolution Oriented Monitoring oriented to Security Properties for Cloud Applications. In Proceedings of the 13th International Conference on Predictive Models and Data Analytics in Software Engineering 2018; ACM: New York, NY, USA, 2018; p. 32. [Google Scholar]
- Muñoz, A.; Maña, A. TPM-based protection for mobile agents. Secur. Commun. Netw. 2010, 4, 45–60. [Google Scholar] [CrossRef]
- Munoz, A.; Mafia, A. Software and Hardware Certification Techniques in a Combined Certification Model. In Proceedings of the 2014 11th International Conference on Security and Cryptography (SECRYPT), Vienna, Austria, 28–30 August 2014; pp. 1–6. [Google Scholar]
- Waller, A.; Sandy, I.; Power, E.; Aivaloglou, E.; Skianis, C.; Muñoz, A.; Maña, A. Policy Based Management for Security in Cloud Computing. In FTRA International Conference on Secure and Trust Computing, Data Management, and Application; Springer: Berlin/Heidelberg, Germany, 2011; pp. 130–137. [Google Scholar]
- Uradzinski, M.; Guo, H.; Liu, X.; Yu, M. Advanced indoor positioning using zigbee wireless technology. Wirel. Pers. Commun. 2017, 97, 6509–6518. [Google Scholar] [CrossRef]
- Moridi, M.A.; Kawamura, Y.; Sharifzadeh, M.; Chanda, E.K.; Jang, H. An investigation of underground monitoring and communication system based on radio waves attenuation using ZigBee. Tunn. Undergr. Space Technol. 2014, 43, 362–369. [Google Scholar] [CrossRef]
- Moridi, M.A.; Sharifzadeh, M.; Kawamura, Y.; Jang, H.D. Development of wireless sensor networks for underground communication and monitoring systems (the cases of underground mine environments). Tunn. Undergr. Space Technol. 2018, 73, 127–138. [Google Scholar] [CrossRef] [Green Version]
- Issad, M.; Kloul, L.; Rauzy, A.; Berkani, K. Modeling the CBTC railway system of siemens with ScOLa. Int. J. Intell. Transp. Syst. Res. 2017, 16, 163–172. [Google Scholar] [CrossRef]
- Yang, L.; Liu, Z. Modeling and verification of train departure scenario for next generation train control system. MATEC Web Conf. 2021, 336, 02008. [Google Scholar] [CrossRef]
- Czaplewski, K.; Wisniewski, Z.; Specht, C.; Wilk, A.; Koc, W.; Karwowski, K.; Skibicki, J.; Dabrowski, P.; Czaplewski, B.; Specht, M.; et al. Application of least squares with conditional equations method for railway track inventory using GNSS observations. Sensors 2020, 20, 4948. [Google Scholar] [CrossRef]
- Chen, J.J.; Hwang, Y.S.; Liao, Y.J.; Ku, Y.; Yu, C.C. A rail-to-rail ultra-wide bandwidth hybrid supply modulator for 5G applications with envelope tracking techniques. Int. J. Circuit Theory Appl. 2019, 47, 1907–1921. [Google Scholar] [CrossRef]
- Muñoz, A.; Maña, A.; Serrano, D. AVISPA In the Validation of Ambient Intelligence Scenarios. In Proceedings of the 2009 International Conference on Availability, Reliability and Security, Fukuoka, Japan, 16–19 March 2009; pp. 420–426. [Google Scholar]
- Sadri, F. Ambient intelligence: A survey. ACM Comput. Surv. 2011, 43, 1–66. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; Li, S. The Function Design for the Communication-Based Train Control (CBTC) System: How to Solve the Problems in the Underground Mine Rail Transportation? Appl. Syst. Innov. 2021, 4, 31. https://0-doi-org.brum.beds.ac.uk/10.3390/asi4020031
Yu H, Li S. The Function Design for the Communication-Based Train Control (CBTC) System: How to Solve the Problems in the Underground Mine Rail Transportation? Applied System Innovation. 2021; 4(2):31. https://0-doi-org.brum.beds.ac.uk/10.3390/asi4020031
Chicago/Turabian StyleYu, Haoxuan, and Shuai Li. 2021. "The Function Design for the Communication-Based Train Control (CBTC) System: How to Solve the Problems in the Underground Mine Rail Transportation?" Applied System Innovation 4, no. 2: 31. https://0-doi-org.brum.beds.ac.uk/10.3390/asi4020031