
An Enhanced Inverse Filtering Methodology for Drive-By Frequency Identification of Bridges Using Smartphones in Real-Life Conditions


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
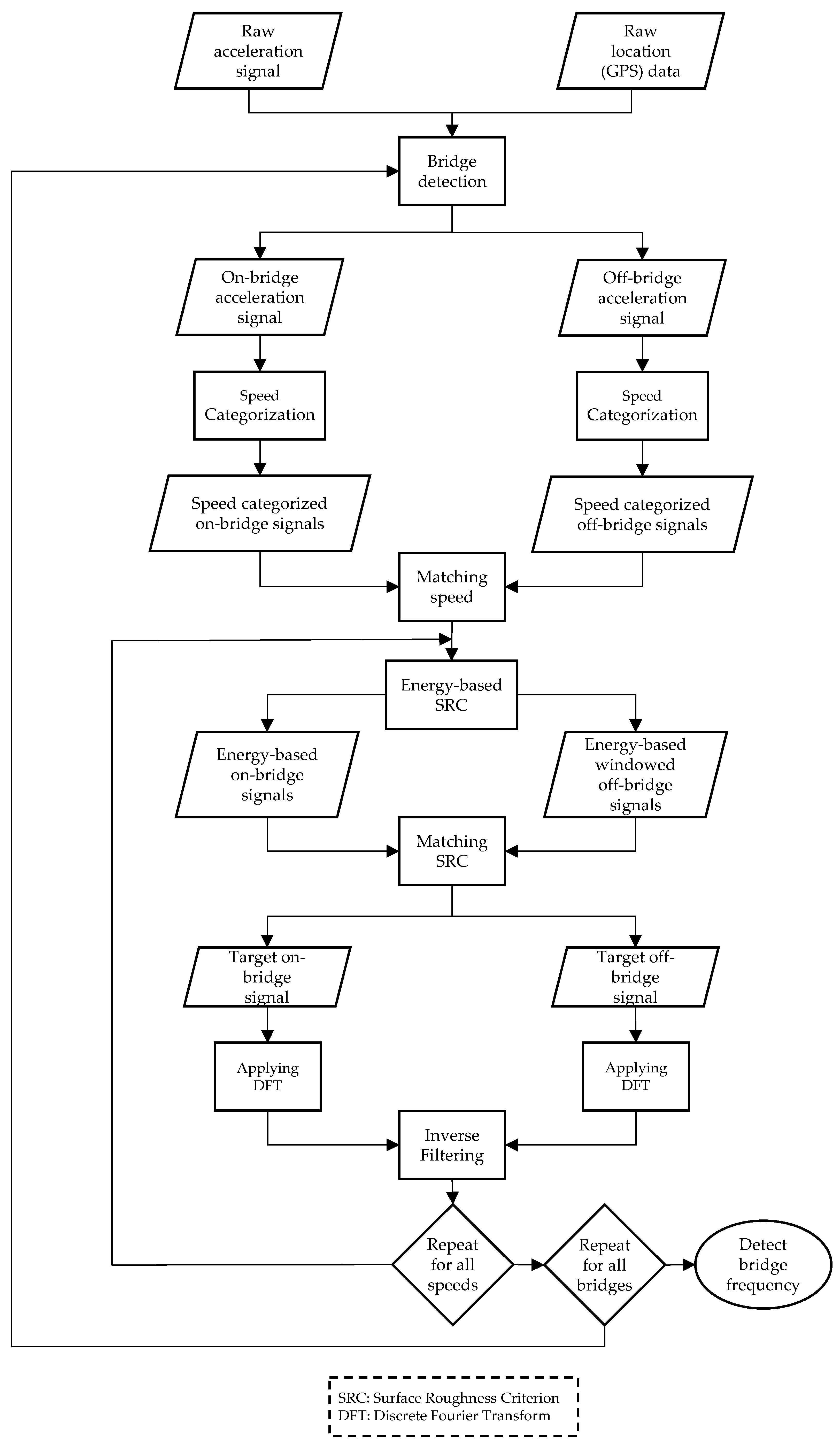
2. Methodology
2.1. Concepts
2.1.1. Vehicle-Bridge Interaction
2.1.2. Inverse Filtering
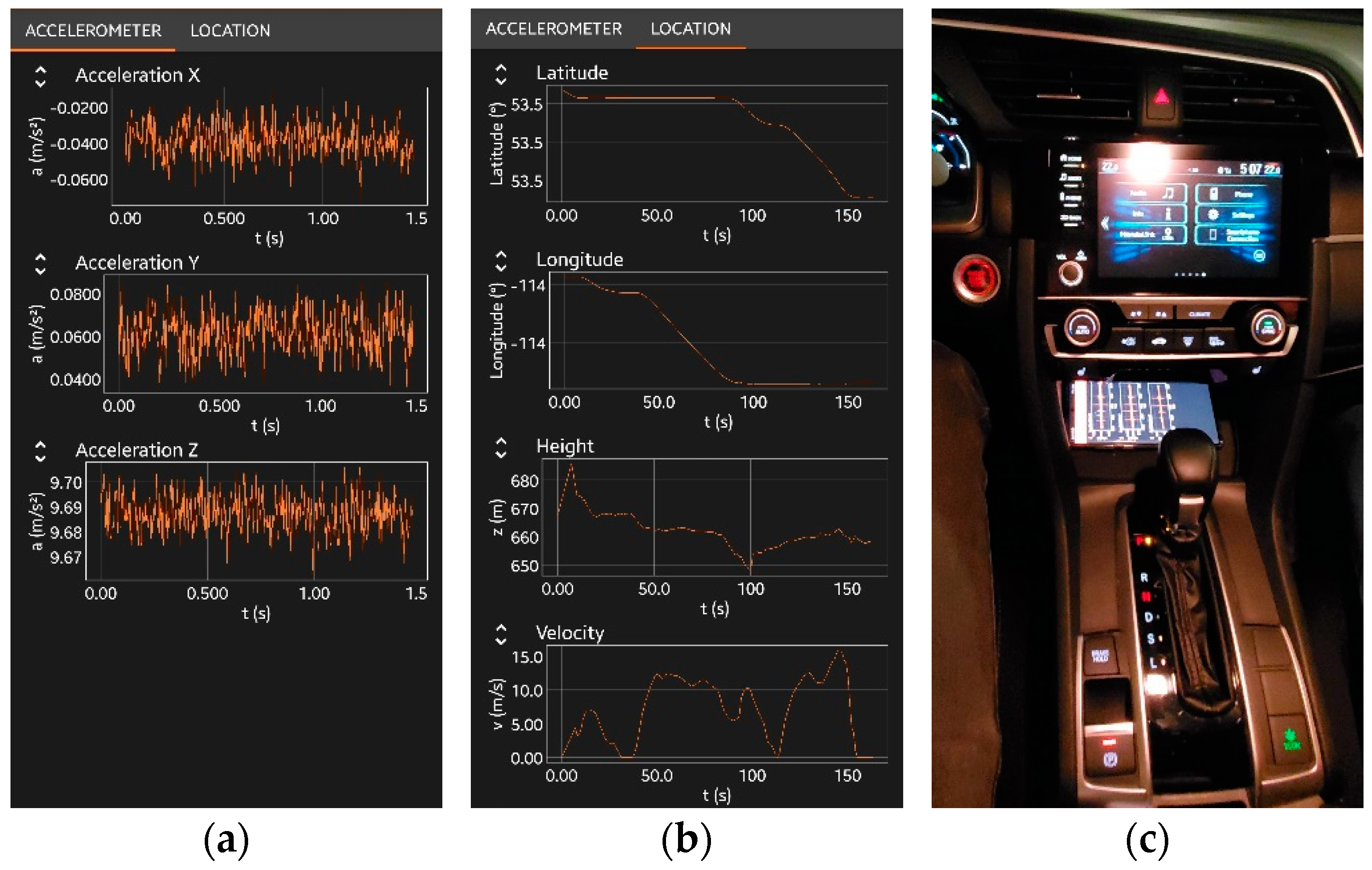
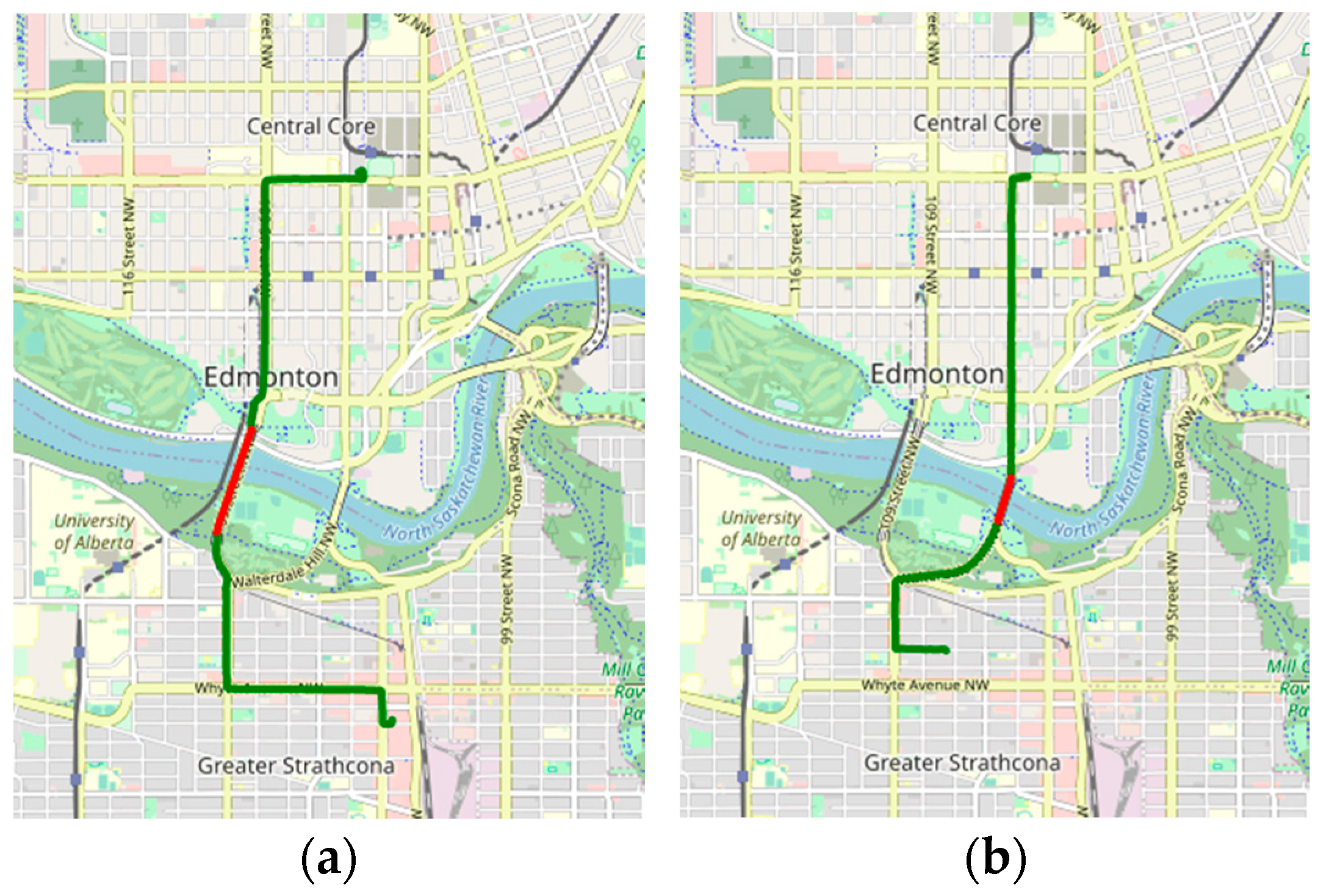
2.2. Data Collection
2.3. Data Analysis
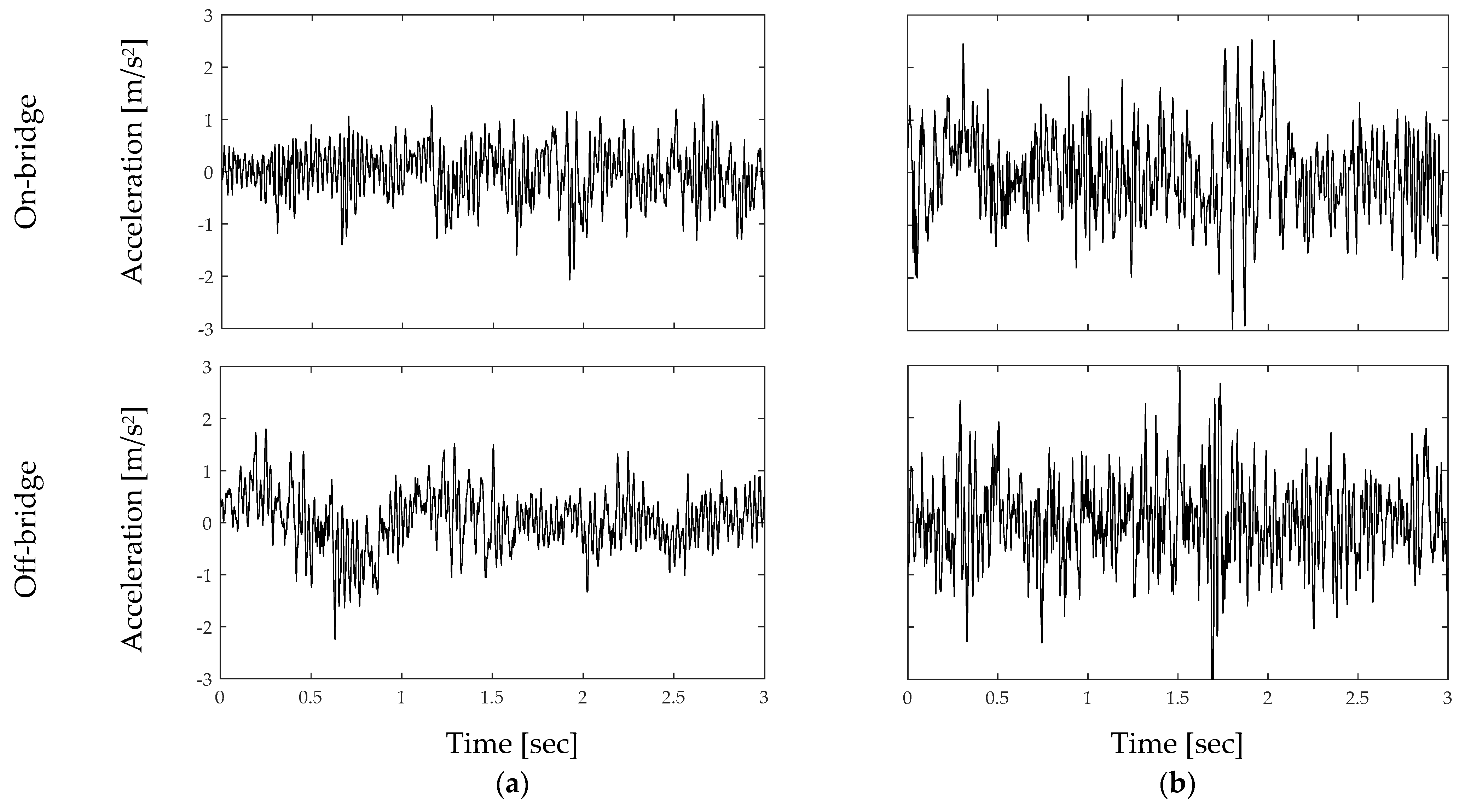
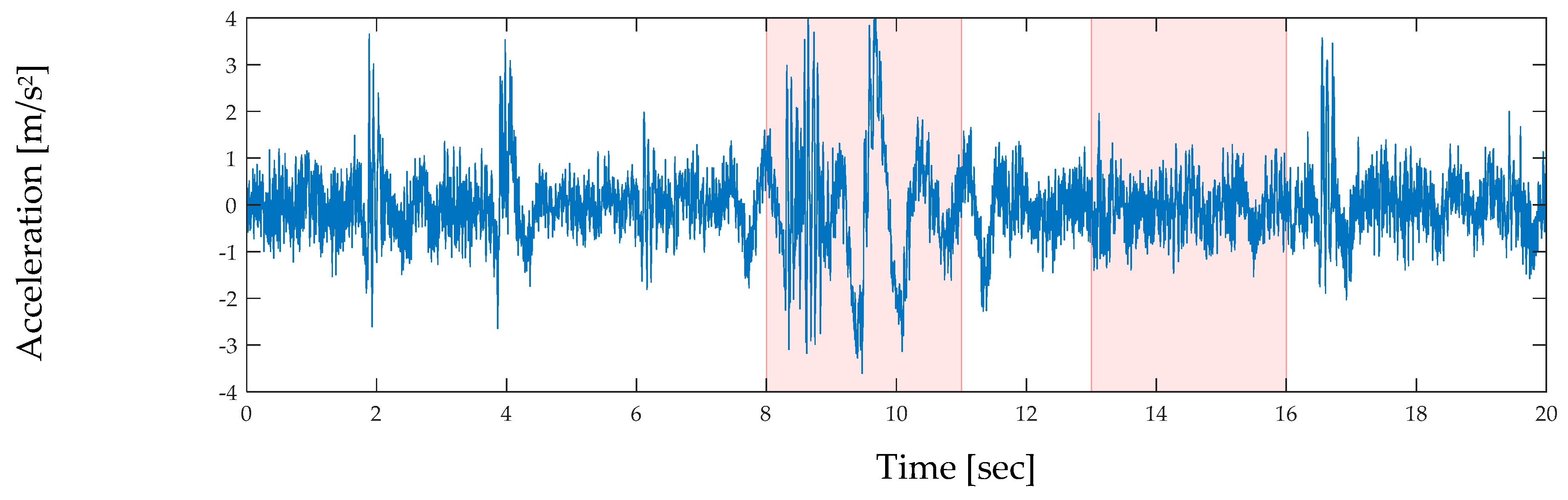
2.3.1. On-Bridge Data Extraction
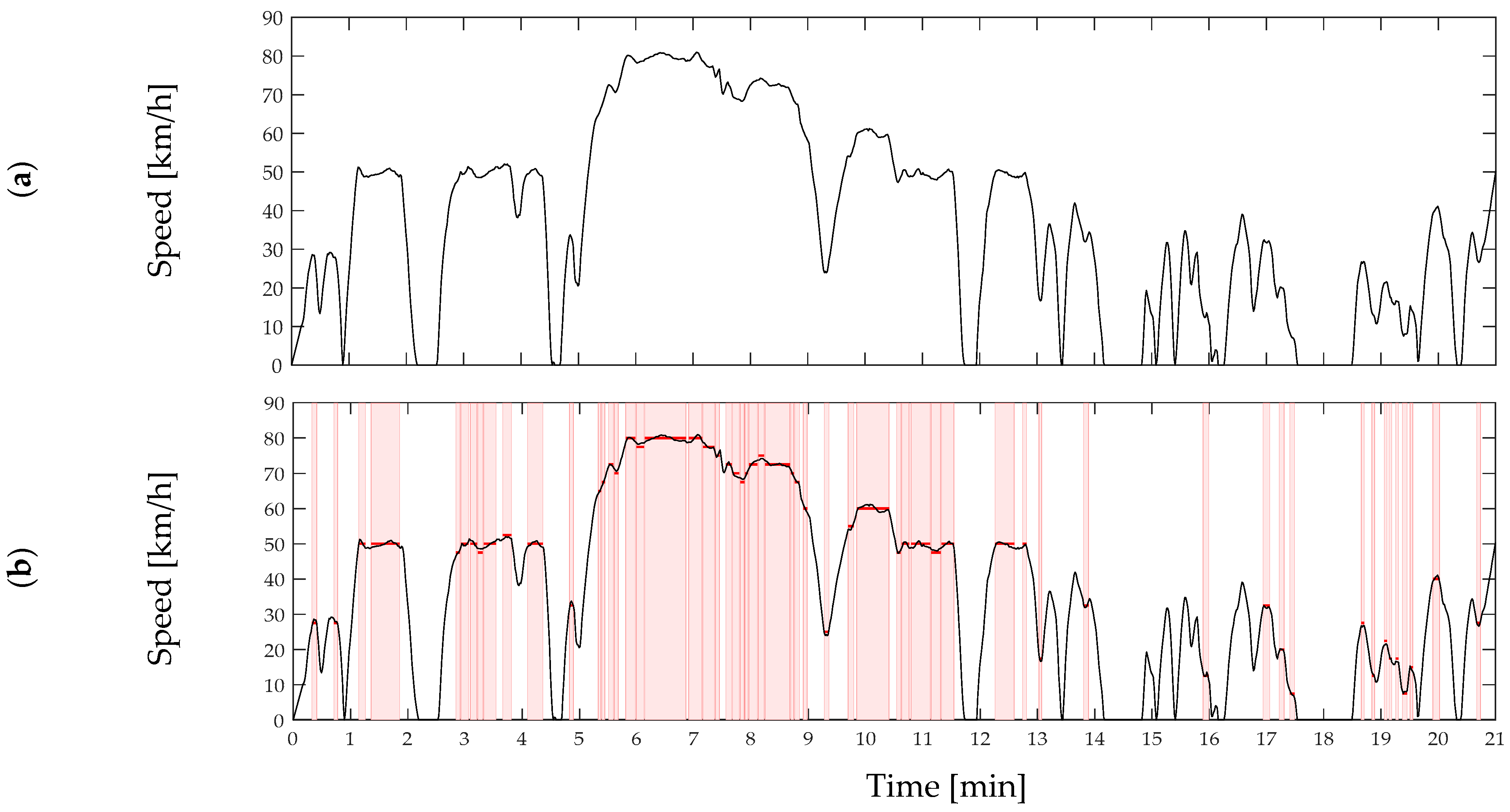
2.3.2. Speed Categorization
2.3.3. Roughness Level Estimation
2.3.4. Inverse Filtering Application
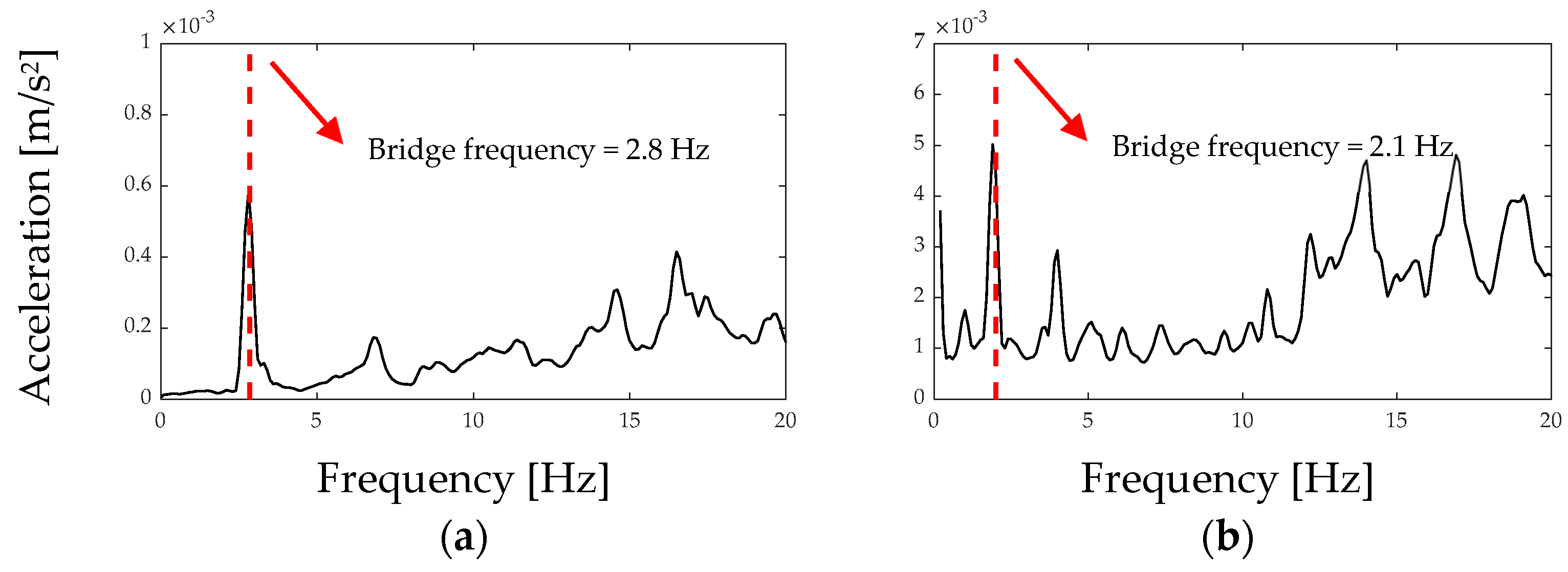
3. Results
4. Discussion
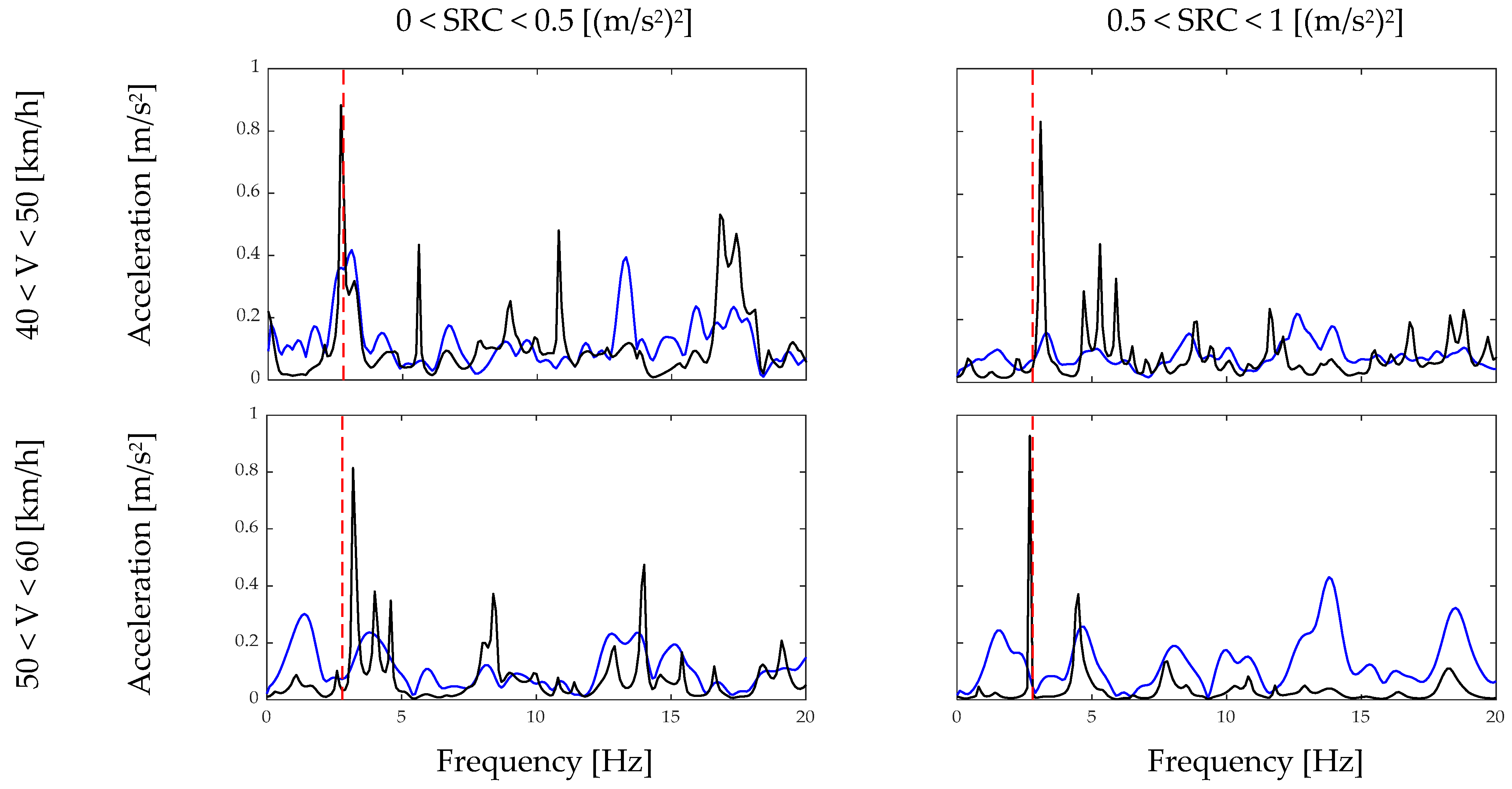
4.1. Effect of the Speed
4.2. Effect of the Surface Roughness
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Renkow, M.; Hoover, D. Commuting, migration, and rural-urban population dynamics. J. Reg. Sci. 2000, 40, 261–287. [Google Scholar] [CrossRef]
- Faturechi, R.; Miller-Hooks, E. Measuring the performance of transportation infrastructure systems in disasters: A comprehensive review. J. Infrastruct. Syst. 2015, 21, 04014025. [Google Scholar] [CrossRef]
- Serrano, W. Digital Systems in Smart City and Infrastructure: Digital as a Service. Smart Cities 2018, 1, 134–154. [Google Scholar] [CrossRef] [Green Version]
- Angelidou, M.; Psaltoglou, A.; Komninos, N.; Kakderi, C.; Tsarchopoulos, P.; Panori, A. Enhancing sustainable urban development through smart city applications. J. Sci. Technol. Policy Manag. 2018, 9, 146–169. [Google Scholar] [CrossRef]
- Silva, B.N.; Khan, M.; Han, K. Towards sustainable smart cities: A review of trends, architectures, components, and open challenges in smart cities. Sustain. Cities Soc. 2018, 38, 697–713. [Google Scholar] [CrossRef]
- Ham, H.; Kim, T.J.; Boyce, D. Assessment of economic impacts from unexpected events with an interregional commodity flow and multimodal transportation network model. Transp. Res. Part A Policy Pract. 2005, 39, 849–860. [Google Scholar] [CrossRef]
- Wilson, M.C. The impact of transportation disruptions on supply chain performance. Transp. Res. Part E Logist. Transp. Rev. 2007, 43, 295–320. [Google Scholar] [CrossRef]
- Canada Infrastructure Report Card. Monitoring the State of Canada’s Core Public Infrastructure; Canada Infrastructure Report Card: Ottawa, ON, Canada, 2019. [Google Scholar]
- Lucic, M.C.; Wan, X.; Ghazzai, H.; Massoud, Y. Leveraging Intelligent Transportation Systems and Smart Vehicles Using Crowdsourcing: An Overview. Smart Cities 2020, 3, 341–361. [Google Scholar] [CrossRef]
- Jan, B.; Farman, H.; Khan, M.; Talha, M.; Din, I.U. Designing a Smart Transportation System: An Internet of Things and Big Data Approach. IEEE Wirel. Commun. 2019, 26, 73–79. [Google Scholar] [CrossRef]
- Astarita, V.; Giofrè, V.P.; Guido, G.; Stefano, G.; Vitale, A. Mobile Computing for Disaster Emergency Management: Empirical Requirements Analysis for a Cooperative Crowdsourced System for Emergency Management Operation. Smart Cities 2020, 3, 31–47. [Google Scholar] [CrossRef] [Green Version]
- Costa, D.; Damasceno, A.; Silva, I. CitySpeed: A Crowdsensing-Based Integrated Platform for General-Purpose Monitoring of Vehicular Speeds in Smart Cities. Smart Cities 2019, 2, 46–65. [Google Scholar] [CrossRef] [Green Version]
- Händel, P.; Ohlsson, J.; Ohlsson, M.; Skog, I.; Nygren, E. Smartphone-based measurement systems for road vehicle traffic monitoring and usage-based insurance. IEEE Syst. J. 2014, 8, 1238–1248. [Google Scholar] [CrossRef] [Green Version]
- Gul, M.; Catbas, F.N. Structural health monitoring and damage assessment using a novel time series analysis methodology with sensor clustering. J. Sound Vib. 2011, 330, 1196–1210. [Google Scholar] [CrossRef]
- Noel, A.B.; Abdaoui, A.; Elfouly, T.; Ahmed, M.H.; Badawy, A.; Shehata, M.S. Structural Health Monitoring Using Wireless Sensor Networks: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2017, 19, 1403–1423. [Google Scholar] [CrossRef]
- Cho, S.; Jo, H.; Jang, S.; Park, J.; Jung, H.J.; Yun, C.B.; Spencer, B.F.; Seo, J.W. Structural health monitoring of a cable-stayed bridge using wireless smart sensor technology: Data analyses. Smart Struct. Syst. 2010, 6, 461–480. [Google Scholar] [CrossRef] [Green Version]
- Wenzel, H. Health Monitoring of Bridges; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Malekjafarian, A.; McGetrick, P.J.; Obrien, E.J. A review of indirect bridge monitoring using passing vehicles. Shock Vib. 2015, 2015, 286139. [Google Scholar] [CrossRef] [Green Version]
- Ozer, E.; Purasinghe, R.; Feng, M.Q. Multi-output modal identification of landmark suspension bridges with distributed smartphone data: Golden Gate Bridge. Struct. Control Health Monit. 2020, 27, 1–29. [Google Scholar] [CrossRef]
- Alavi, A.H.; Buttlar, W.G. An overview of smartphone technology for citizen-centered, real-time and scalable civil infrastructure monitoring. Future Gener. Comput. Syst. 2019, 93, 651–672. [Google Scholar] [CrossRef]
- Mei, Q.; Gül, M.; Shirzad-Ghaleroudkhani, N. Towards smart cities: Crowdsensing-based monitoring of transportation infrastructure using in-traffic vehicles. J. Civ. Struct. Health Monit. 2020, 10, 653–665. [Google Scholar] [CrossRef]
- Mei, Q.; Gül, M. A cost effective solution for pavement crack inspection using cameras and deep neural networks. Constr. Build. Mater. 2020, 256, 119397. [Google Scholar] [CrossRef]
- Mei, Q.; Gül, M. A crowdsourcing-based methodology using smartphones for bridge health monitoring. Struct. Health Monit. 2019, 18, 1602–1619. [Google Scholar] [CrossRef]
- Matarazzo, T.J.; Santi, P.; Pakzad, S.N.; Carter, K.; Ratti, C.; Moaveni, B.; Osgood, C.; Jacob, N. Crowdsensing Framework for Monitoring Bridge Vibrations Using Moving Smartphones. Proc. IEEE 2018, 106, 577–593. [Google Scholar] [CrossRef]
- Elhattab, A.; Uddin, N.; Obrien, E. Drive-by bridge frequency identification under operational roadway speeds employing frequency independent underdamped pinning stochastic resonance (FI-UPSR). Sensors 2018, 18, 4207. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Malekjafarian, A.; OBrien, E.J. On the use of a passing vehicle for the estimation of bridge mode shapes. J. Sound Vib. 2017, 397, 77–91. [Google Scholar] [CrossRef] [Green Version]
- Keenahan, J.; OBrien, E.J.; McGetrick, P.J.; Gonzalez, A. The use of a dynamic truck-trailer drive-by system to monitor bridge damping. Struct. Health Monit. 2014, 13, 143–157. [Google Scholar] [CrossRef] [Green Version]
- Hong, W.; Qin, Z.; Lv, K.; Fang, X. An indirect method for monitoring dynamic deflection of beam-like structures based on strain responses. Appl. Sci. 2018, 8, 811. [Google Scholar] [CrossRef] [Green Version]
- Catbas, F.N.; Aktan, A.E. Modal analysis as a bridge health monitoring tool. In Proceedings of the Structures Congress 2000: Advanced Technology in Structural Engineering, Philadelphia, PA, USA, 8–10 May 2000; Volume 103, pp. 1–10. [Google Scholar]
- Stiros, S.; Moschas, F. Rapid Decay of a Timber Footbridge and Changes in Its Modal Frequencies Derived from Multiannual Lateral Deflection Measurements. J. Bridge Eng. 2014, 19, 05014005. [Google Scholar] [CrossRef]
- Shirzad-Ghaleroudkhani, N.; Mei, Q.; Gül, M. Frequency Identification of Bridges Using Smartphones on Vehicles with Variable Features. J. Bridge Eng. 2020, 25, 04020041. [Google Scholar] [CrossRef]
- Shirzad-Ghaleroudkhani, N.; Gül, M. Inverse Filtering for Frequency Identification of Bridges Using Smartphones in Passing Vehicles: Fundamental Developments and Laboratory Verifications. Sensors 2020, 20, 1190. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.-B.; Yau, J.-D. Vehicle-Bridge Interaction Element for Dynamic Analysis. J. Struct. Eng. 1997, 123, 1512–1518. [Google Scholar] [CrossRef]
- Zhong, H.; Yang, M.; Jerry, Z. Dynamic responses of prestressed bridge and vehicle through bridge—Vehicle interaction analysis. Eng. Struct. 2015, 87, 116–125. [Google Scholar] [CrossRef]
- Wakita, H. Direct Estimation of the Vocal Tract Shape by Inverse Filtering of Acoustic Speech Waveforms. IEEE Trans. Audio Electroacoust. 1973, 21, 417–427. [Google Scholar] [CrossRef]
- Rothenberg, M. New Inverse-Filtering Technique for Deriving the Glottal Air Flow Waveform during Voicing. J. Acoust. Soc. Am. 1970, 48, 130. [Google Scholar] [CrossRef]
- Michailovich, O.; Tannenbaum, A. Blind deconvolution of medical ultrasound images: A parametric inverse filtering approach. IEEE Trans. Image Process. 2007, 16, 3005–3019. [Google Scholar] [CrossRef]
- Staacks, S.; Hütz, S.; Heinke, H.; Stampfer, C. Advanced tools for smartphone-based experiments: Phyphox. Phys. Educ. 2018, 53, 045009. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Gül, M.; Kostić, B. Eliminating Temperature Effects in Damage Detection for Civil Infrastructure Using Time Series Analysis and Autoassociative Neural Networks. J. Aerosp. Eng. 2019, 32, 04019001. [Google Scholar] [CrossRef]
- Gu, J.; Gul, M.; Wu, X. Damage detection under varying temperature using artificial neural networks. Struct. Control Health Monit. 2017, 24. [Google Scholar] [CrossRef]
- Kostić, B.; Gül, M. Vibration-Based Damage Detection of Bridges under Varying Temperature Effects Using Time-Series Analysis and Artificial Neural Networks. J. Bridge Eng. 2017, 22, 04017065. [Google Scholar] [CrossRef]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shirzad-Ghaleroudkhani, N.; Gül, M. An Enhanced Inverse Filtering Methodology for Drive-By Frequency Identification of Bridges Using Smartphones in Real-Life Conditions. Smart Cities 2021, 4, 499-513. https://0-doi-org.brum.beds.ac.uk/10.3390/smartcities4020026
Shirzad-Ghaleroudkhani N, Gül M. An Enhanced Inverse Filtering Methodology for Drive-By Frequency Identification of Bridges Using Smartphones in Real-Life Conditions. Smart Cities. 2021; 4(2):499-513. https://0-doi-org.brum.beds.ac.uk/10.3390/smartcities4020026
Chicago/Turabian StyleShirzad-Ghaleroudkhani, Nima, and Mustafa Gül. 2021. "An Enhanced Inverse Filtering Methodology for Drive-By Frequency Identification of Bridges Using Smartphones in Real-Life Conditions" Smart Cities 4, no. 2: 499-513. https://0-doi-org.brum.beds.ac.uk/10.3390/smartcities4020026