
Technology Developments and Impacts of Connected and Autonomous Vehicles: An Overview




1
Department of Civil, Construction, and Environmental Engineering, North Dakota State University, Fargo, ND 58108, USA
2
Department of Transportation, Logistics, and Finance, North Dakota State University, Fargo, ND 58108, USA
*
Author to whom correspondence should be addressed.
Smart Cities 2022, 5(1), 382-404; https://0-doi-org.brum.beds.ac.uk/10.3390/smartcities5010022
Submission received: 1 March 2022
/
Revised: 14 March 2022
/
Accepted: 15 March 2022
/
Published: 17 March 2022
(This article belongs to the Special Issue Advances in Connected and Autonomous Vehicles)
Abstract
:The scientific advancements in the vehicle and infrastructure automation industry are progressively improving nowadays to provide benefits for the end-users in terms of traffic congestion reduction, safety enhancements, stress-free travels, fuel cost savings, and smart parking, etc. The advances in connected, autonomous, and connected autonomous vehicles (CV, AV, and CAV) depend on the continuous technology developments in the advanced driving assistance systems (ADAS). A clear view of the technology developments related to the AVs will give the users insights on the evolution of the technology and predict future research needs. In this paper, firstly, a review is performed on the available ADAS technologies, their functions, and the expected benefits in the context of CVs, AVs, and CAVs such as the sensors deployed on the partial or fully automated vehicles (Radar, LiDAR, etc.), the communication systems for vehicle-to-vehicle and vehicle-to-infrastructure networking, and the adaptive and cooperative adaptive cruise control technology (ACC/CACC). Secondly, for any technologies to be applied in practical AVs related applications, this study also includes a detailed review in the state/federal guidance, legislation, and regulations toward AVs related applications. Last but not least, the impacts of CVs, AVs, and CAVs on traffic are also reviewed to evaluate the potential benefits as the AV related technologies penetrating in the market. Based on the extensive reviews in this paper, the future related research gaps in technology development and impact analysis are also discussed.
1. Introduction
Automation advancements in the vehicle industry is a continuous process that delivers several benefits such as reducing driver’s fatigue, improving road safety, fuel efficiency, and smart parking options. Autonomous vehicles (AVs) are also known as self-driving cars that require little of driver’s assistance [1]. It is important to understand the difference between the terms AV, “connected vehicle (CV)”, and “connected autonomous vehicle (CAV)”. Atkins provided brief definitions for AV as “a car that is capable of fulfilling the operational functions of a traditional car (e.g., driving, lane-change, parking, etc.) without the aid of a human operator” and CV as “a car that is equipped with a technology enabling it to connect and communicate with other devices within the car, and also to other surrounding cars and external networks (e.g., internet, navigation, environment data, etc.)” [2]. Thus, a CAV is supposed to be a car that is capable of fulfilling the operational functions of a traditional car by itself and can communicate with nearby cars and infrastructures for a safer driving.
To automatically operate a vehicle on its own, the AV relies on the sensors installed in the vehicle that helps in inspecting the surrounding environment. Sensors such as the global positioning system (GPS) and high-definition cameras record the position of the car and review other elements of traffic around the AV [3]. With the built-in software functionality and smart algorithms, AVs can then identify the obstacles on the road such as road markings, preceding and following vehicles, vehicle on adjacent lanes, traffic signals, presence of pedestrians, cyclists, and other infrastructure installations. The proper data acquisition, processing, and communication, on an AV is very important to ensure the driving safety.
As a relatively new type of automation, the complete penetration of AVs to the local traffic market requires decades. Currently, researchers, car manufacturers, computer scientists, and state departments are evaluating the AVs’ feasibility, reliability and future impacts on various transportation aspects such as highway capacity, public transport, parking, fuel consumption, pollution, traffic accidents, vehicle’s security, travel demand forecasts, and policies for infrastructure developments and maintenance. A study by Litman indicated that the initial benefits of AVs such as independent mobility for affluent non-drivers may occur during the 2030s to 2040s. The potential gains of traffic reduction and parking congestions, improved safety, affordability for low-income customers, energy conservation, and emission reduction would be available in the late 2050s or 2060s [1].
During the long transition period, traditional vehicles and self-driving cars would exist, and detailed analysis of mixed traffic stream is needed to study the interaction of a human-driven-vehicles and AVs. Researchers are investigating several aspects of the traffic that can be affected by the introduction of AVs into the traffic stream. The implementation of AV into the urban traffic may lead to changes in traffic patterns and city design [4]. Individual travel behavior such as trip generation, mode choice, car ownership and travel time will also be affected by the gradual penetration of AVs [5,6]. In case of traffic environment, while the behavior of CAVs will be more deterministic, the behavior of human drivers tends to be very stochastic involving high level of uncertainty and randomness [7]. Such behaviors include reaction time, headways and safety distance, desired speed, as well as their diverse responses to traffic disruptions such as executing lane changes or applying sudden break. So, the CAVs need to be equipped with strong protocols of communication to be prepared for any uncertainty in the mixed traffic environment.
CAVs require communication with multiple objects such as infrastructure, surrounding vehicles, pedestrians, sensors, smart devices, etc. Since the CAVs are highly dependent on the communications between each other and with the elements of infrastructure, the innovations in the intelligent transportation system (ITS) for the vehicle automation have shown great supports for hi-tech advancement in highways and in-vehicle technologies, especially, for the CAVs. According to ITS Canada, ITS “is the application of advanced and emerging technologies (computers, sensors, control, communications, and electronic devices) in transportation to save lives, time, money, energy and the environment” [8]. Currently, a substantial amount of ITS applications are in use for highway automation such as active traffic management, traffic signals synchronization, on-board vehicle navigation system (e.g., Google maps), smartphone application, and other connected vehicle technologies [9]. The primary reason for the ITS application is to improve network efficiencies such as the reduction in traffic congestion, alleviate driver’s safety and security.
Specifically, the United States Department of Transportation (USDOT) defines three types of connected vehicle communications for CAVs, including vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I), vehicle-to-device (V2X) [10] where the ‘X’ can be passenger, another vehicle, onboard device, or cloud technology [9], wireless sensor, and other navigation guidance tools. Figure 1 illustrates three communication channels of CAVs such as V2V, V2I, and I2I communications, where a roadside unit (RSU) can be a traffic signal and other active traffic management sensors. I2I is referred to as infrastructure-to-infrastructure communication e.g., communication between two consecutive signalized junctions for forming a green wave of the traffic signal [11].
For any of the communications for CAVs, wireless technologies such as dedicated short-range communications (DSRC), light detection and ranging (LiDAR) for 360-degree imaging, RADAR, Bluetooth, and cellular navigation system are very important [12]. These sensors can be used to measure the relative distance to nearby objects to improve the perception of the vehicle to its surroundings to improve the ability of the driver to make driving decisions. However, the onboard vehicle sensors such as cameras, RADAR, and/or LiDAR are highly dependent on the type and quality of sensors, object occlusion, field of view and detection range which often results in limited accuracy that prevents making decision for action that require reliable position information with low probability of error [13]. Thus, DSRC is preferred over other communication channels because of fixed licensed bandwidth, fast network acquisition, low communication latency, high reliability, interoperability, and security [14]. A basic safety message (BSM) is communicated through DSRC. A classic example of V2I communication is when a central control station for an intersection records the position of CAVs through the data transferred by the DSCR message set dictionary [15] (combing GPS and BSM signals) with a frequency transmission of 10 times per second [9].
The information received from nearby vehicles or/and the infrastructure enhances the capacity, safety, and mobility of the traffic flow. Since the concept of autonomous driving is still in the development stage, it is challenging to study the impact of CAVs on traffic flow to obtain real data without significant penetration into the traffic. Therefore, microsimulation modeling is considered to be a great tool to investigate the traffic impact of AVs [16]. In microsimulation modeling, the AV can be modeled as follows;
- Modification of the parameters of the existing car-following models: For any car-following model, the micro-simulation tool uses various statistical distributions and functions for defining the maximum, minimum, and desired acceleration/deceleration values, desired speed values and other vehicular characteristics that can be adjusted to reflect the behavior of CAVs [17,18,19,20].
- Modification of the parameters of the existing lane-change models: The lane-change system uses lane-change models to define the driver’s decision as to when it is possible to change a lane or not to change a lane in a multi-lane road network system [21]. Mostly lane-changing models are based on a set of rules that enables the driver to make a decision about when it is necessary to change a lane to reach the desired destination [22,23,24,25]. These lane-change rules can be modified to test the behavior of CAVs in the microsimulation platforms.
- Writing external algorithms for car-following techniques: The writing of external algorithms to modify the default car-following model parameters such as headway, safety distance, acceleration functions, speed distributions, cruise control, or platooning is one approach to model the anticipated behavior of AVs and CAVs [26,27,28]. For example, the Microsoft COM (component object model) provides communication, connection, and access to different applications such as the data and functions in the PTV VISSIM microsimulation platform can be accessed externally through the COM-interface using different programming languages such as VBA, Python, C++, C#, MATLAB, and JAVA [29]. It can access each vehicle’s attribute (e.g., current position, acceleration, orientation on the lane, vehicle’s receiving traffic light status, etc.) during a simulation run and can also edit some of the parameters (e.g., arrival pattern of vehicles in the network, create or remove vehicles, etc.
To better understand how the CAVs can advance themselves and change future traffic and road infrastructures, this paper reviews the technologies developed for the advance of CVs, AVs, and CAVs, and its potential impacts on some key traffic flow parameters. Therefore, the remaining of the paper is organized as follows: Section 2 introduces the advanced driver assistance system, Section 3 reviews the automated driving systems, Section 4 discusses the potential impacts of CAVs on some key traffic flow parameters, and Section 5 concludes this review and derives some future research interests.
2. Advanced Driver Assistance Systems (ADAS)
The ADAS supports a driver while performing a certain driving task with safety, convenience, efficiency, and improving the overall driver’s experience. Furthermore, the ADAS can allow elderly and disabled people to enjoy driving. The driving assist technologies have progressively matured in recent years. Currently, the scope of ADAS technologies is expanding around the automotive market quite rapidly [30]. Many of the advanced driving assistance functions are already made available in today’s motor cars such as lane-assistance, lane-departure warnings, adaptive cruise control (ACC), blind-spot detection, etc. Table 1 shows a list developed by the National Highway Traffic Safety Administration (NHTSA) [31] for five eras of safety through the evolution of automated safety technologies.
The vehicle advance assists technologies often termed as ‘automated highway system (AHS)’ or ‘cooperative vehicle-highway automation (CVHA)’ usually employs technologies such as LiDAR, RADAR, V2V, and V2I systems [32,33]. Certain driving assistance tools have been developed by various ADAS companies and car manufacturers as shown in Table 2 to perform CVHA operations which are further discussed in the following sections for more details [26].
2.1. Assistance Technologies for Lateral Movement
Various ADAS technologies have been defined for vehicle maneuvering on a multi-lane highway such as LiDAR, Lane-keeping, lane-changing, and left-turn assist.
- Light detection and ranging (LiDAR): Autonomous vehicles are equipped with various technologies such as GPS, radars, and laser sensors to inspect the surrounding elements while driving. LiDAR is an optical remote sensing technology that measures the distance to a target object or other features of a target (e.g., shape, size, design, etc.) by illuminating it with light, often by using pulses from a laser [34]. The LiDAR technology provides data as a cloud of dense 3D points for the shape of vehicles, pedestrians, curbs, traffic signs, and other neighboring elements within the range of laser sensors [35]. LiDAR is normally installed on the roof of autonomous cars which provides 360-degree imaging. However, this system is in the development stage, yet complex and expensive. For example, the cost of the LiDAR system installed in the Googles’ car is $70,000 [12]. AVs and CAVs rely on the data quality of the LiDAR to provide smooth and safe operations.
- Lane-keeping: Vehicles are assisted through built-in cameras and positioning systems to monitor lane-markings. Generally, the cameras are fixed above the central rearview mirror. If the vehicle is going off-track, a ‘lane-departure warning (LDW)’ system is automatically activated to warn the driver of a possible exit from the current lane. Another system called ‘Lane-keeping assistant’ prepares the driver for maintaining a lane-discipline through automated steering and/or braking [32] as shown in Figure 2.
- Lane-changing: As the driver decides to change the lane from the current lane, the system alerts the driver for the presence of traffic in the target lane. It is helpful especially when the adjacent vehicle is in the blind spot which could be missed while making a lane-change. The system uses short-range radar sensors that observe the surrounding traffic zones to the adjacent sides and back of the car. If the driver ignores the warning and initiates the lane maneuvering, another strong message is transmitted to avoid the side crash [32].
- Left-turn assist: When the drivers decide to take a left turn at an intersection, this feature alerts the driver using a camera and GPS positioning data if the conditions are not feasible. The laser scanners are installed in front of the vehicle which senses the on-coming traffic and sends a signal to the driver for the application of breaks and/or otherwise, the vehicle decelerates to stop automatically [36].
2.2. Advanced Technologies for Forwarding Movement
Forward movement technologies assist in car-following and lane-changing tasks for the vehicle. It consists of three systems broadly including adaptive cruise control (ACC), cooperative adaptive cruise control (CACC), and front cross-traffic monitoring [26].
- Adaptive cruise control (ACC): This system is an advanced feature of conventional cruise controls in vehicles. ACC examines the leading traffic in the same lane through cameras, laser, or radar sensors [27,32,36]. This system is designed to provide relief to the driver and convenience by releasing the stress of the need to continuously match the speed with the leading vehicle [27]. It works on two principles. First, the speed and headway of the leading vehicle are recorded by the following vehicle equipped with the ACC feature. Secondly, the following ACC vehicle adjusts its speed and maintain a safe gap from the leading vehicle. If the desired safe gap is diminishing and/or the leading vehicle is slowing down, the ACC vehicle will adjust its speed accordingly as shown in Figure 3. Similarly, if the gap ahead is clear (e.g., front car accelerates or changed a lane), the ACC vehicle will accelerate to achieve the desired cruising speed. Section 4.1 elaborates on the benefits of ACC systems for autonomous cars.
- Cooperative adaptive cruise control (CACC): It is an advanced form of the ACC system which conducts effective V2V communication between the leading and the following vehicles. In such a scenario, the following vehicles will better anticipate the driving behavior of a vehicle ahead. Under CACC, the leading vehicle sends a message about its recommended speed and (sometimes lane assignment) to the following vehicle. Once the signal is received, the following vehicle will adjust its speed and desired distance without the involvement of the driver [36]. CACC enables the vehicle to follow each other at tight distances. Hence, it provides traffic flow stability and improved throughput by increasing highway capacity up to a lane drop [37]. No definite consensus or definition of CACC has been fixed at this stage as the concept of CACC is still under development. This system will provide smooth, safe, and efficient driving behavior. The CACC vehicles maintains shorter safety gaps however the reduced gap between the two vehicles is only possible if both vehicles are equipped with CACC technology [37]. Further, at least 40% of market penetration is required to acquire some benefits of CACC technology [37]. Van Arem developed a car-following model for CACC called the cooperative following (CF) using automated longitudinal control combined with intervehicle communications [37,38]. The CF model forms platoons by connecting vehicles with each other and keeping a tight distance. The CACC platoon can be considered as a train, with the first vehicle of the platoon being the locomotive (leader) and the rest of the railcars follow the instructions of the leader. Figure 4 presents the principle for CACC communication between the ‘n’ number of vehicles where ‘n−1’ is the preceding vehicle. The first vehicle is the leader of a platoon while the rest of the following vehicles are taking directions from the leader. Each vehicle in the string has a leading vehicle and the following vehicle [38] e.g., the third vehicle follows the second vehicle but leads the fourth vehicle.
- Front cross-traffic monitoring/alert (FCTA): This feature uses a camera, radars, and a color display screen to detect the vehicles or bicyclists at T-intersections [32]. The vehicle is vulnerable at intersections because of a lack of sight distance. Once the object is under the system’s trajectory, FCTA identifies the object and shows it to the user through an interactive display. If there exists a risk, a user is warned and the system boosts the braking power until it is sufficient to prevent the vehicle from a collision or otherwise reducing the amount of possible damage.
2.3. Reverse Movement
Two types of driver’s assistance technologies are available for reverse movement including the rearview camera and the rear cross-traffic monitoring. The Rearview camera is a common feature in most vehicles as shown in Table 2 [32]. This function is activated when the driver applies the reverse gear. An interactive display shows the position of the car while pushing the vehicle in a reverse direction. As soon as the driver is close to the obstructions, the sensors (e.g., reverse-traffic monitoring) alert the driver for a possible accident. Similarly, if the vehicle is equipped with the rear cross-traffic monitor when reversing the vehicle the same interactive display also alerts the driver about the detected vehicles crossing behind from either side of the vehicle [39]. These technologies can help to prevent back over crashes since it is estimated by National Highway Traffic Safety Administration (NHTSA) that back over crashes account for approximately 15,000 injuries and about 210 fatalities involving light vehicles annually [40]. Though the rearview cameras can help drivers to see areas directly behind the vehicles but it has a limitation that it do not show the sides or rear corners of the vehicle and the driver has to rely on the side mirrors to perceive nearby objects [41].
2.4. Crash Avoidance/Severity Reduction
The in-vehicle cameras and onboard sensors alert the driver before the occurrence of a potential crash and/or otherwise help in the reduction of crash damage. This function depends on the collaboration of three systems, including the forward collision warning (FCW), brake assistant, and active protection system. These systems work in conjunction, at first, when the system detects the potential crash, it alerts the driver. Secondly, the brake assistant takes the same command and applies the appropriate brakes to reduce the severity of a collision. In the last stage, if an emergency stop is performed or if a crash is imminent, the active protection system prepares the vehicle by closing its windows, tightening seatbelts, and releasing airbags. These technologies have been commercially available in the vehicular market for many years. Mercedes-Benz introduced FCW system in United States as an option in 2000 and Acura followed with FCW with braking assistant in 2006 [42] as highlighted in Table 2. A study by Cicchino (2017) on the performance of FCW-alone systems, low-speed braking assistant systems, and FCW with high-speed braking assistant systems revealed that rear-end vehicular crashes can be reduced by 27% using FCW alone systems, 43% using low speed braking assistant systems and 50% using FCW with high-speed braking assistant systems [42]. Isakson-Hellman and Lindman (2015) observed a 38% reduction in rear-end collision in Volvos equipped FCW and ACC systems [43].
2.5. Parking
The parking assisting system is generally activated when the vehicle is in reverse gear status and speed is below 10 miles per hour. Drivers use parking assistance technologies to find adequate parking spaces, and in some cases the vehicles can automatically park themselves after finding the required parking space. Through various sensors, the automated parking system assists drivers in learning the environment surrounding the car during the parking process, and vehicular collisions caused by a lack of human experience may be prevented by steering wheel actions controlled by automatic parking systems. Several automobile manufacturers have introduced this feature into the vehicles as highlighted in Table 2.
2.6. Attention Monitoring
Attention monitoring systems record the driver’s fatigue level through facial recognition analysis. The system is trained to detect certain prolonged facial features such as closed eyes or not looking ahead, as well as some steering behaviors that suggest the onset of drowsiness. If the system encounters the driver’s fatigue, it generates a warning so that the driver may stop or rest. Since more than half of the crashes that involve inattention were caused by distracted driving [44], this system can help in reducing distracted driving incidents and several car manufacturer have already introduced this feature in the vehicles as provided in Table 2.
2.7. Congestion Assistant or Traffic Jam Assist
Driving on congested highways and long-queuing conditions is a hectic and stressful activity. The recent technologies e.g., congestion assistant or traffic jam assist (TJA) takes full control of driving and provide relief to the driver from the tedious task of driving during traffic jams. Under this system, the primary lateral (e.g., lane-keeping) and longitudinal control (e.g., accelerative or deceleration, breaks) are ceded by the driver. Some manufacturers like the Mercedes S-class provide a TJA system though the driver is expected to keep the hand on the steering wheel [32,36].
3. Automated Driving Systems (ADS)
With the motivation of reducing crashes and enhancing mobility on the U.S highways through innovative solutions, USDOT along with NHTSA has developed guidelines for the automatic driving system (ADS) technology knows as ‘A Vision for Safety’, which points out that “The Federal Government wants to ensure it does not impede progress with unnecessary or unintended barriers to innovation. Safety remains the number one priority for U.S. DOT and is the specific focus of NHTSA” [45]. This section reviews the technologies and considerations required for full ADSs.
3.1. Level of Autonomous Vehicles
NHTSA and USDOT initially defines five levels of vehicle automation in 2013 [46] starting from Level 0 (no automation) to Level 4 (full self-driving automation). Later, the Society of Automotive Engineers (SAE) International (a global association) redefines six levels of vehicle automation such as Level 0 (no automation) to Level 5 (full automation) as shown in Table 3, which was adopted by the NHTSA and USDOT in 2016 [45]. Level 1–3 requires a driver’s license to operate the vehicle with a license whereas Level 4–5 allows driverless operations. The maximum benefits of autonomous vehicles are predicted in Level 4 or Level 5 vehicles [1]. Most current vehicles have acquired Level 1 or Level 2 since these vehicles are equipped with ADAS technologies such as cruise control, hazard warning, and automated parallel parking. The automotive industry requires several years of development, testing, and approval to completely reach Level 5 of self-driving vehicles [47]. Currently, there exists extensive competition in the automotive industry to acquire fully autonomous features for their vehicle design. Companies have been implementing Level 4 pilot projects to test AVs under certain circumstances such as specific road types, areas, and weather. For example, Waymo and Uber evaluate driverless taxis in Phoenix, Arizona region back in 2017 [48,49]. Regardless of the progress made towards the technological advancement and improvements in the automation of driving, yet the proposed system requires more training under all normal conditions [50] to avoid potential vehicle malfunction crashes.
3.2. Safety Considerations for ADSs
The design and validation process of the ADSs should be based on a system-engineering approach in order to develop the proposed system designs with no or minimal safety risks [45]. It can be achieved by following the industry standards such as the International Standard Organization (ISO) and SAE international along with other industry standards and/or internal company procedures. The process should also define the hazard analysis in case of ADSs malfunctioning and focus on the overall design of the vehicle into which the ADS system is being implemented. The application of the software is a critical component that requires efficient planning, control, and detailed documentation to define, detect, and tackle the issues from unwanted results and necessary routine updates. Each software update may follow rigorous safety trials to improve artificial intelligence, safety procedures, and other safety algorithms to support the effectiveness of the ADSs system. Another aspect of the safety system is the decisions of design. The decisions should be associated with the potential risks of design considerations such as design architecture, software malfunction, environmental impacts, sensors, collision, traffic laws violation, roadway departure, and other unexpected driving behaviors. It is advised to thoroughly test, validate, and verify the safety procedures and document the entire process [45].
The entities are encouraged to define each ADS functionality in the car after assessing and validating it. The users must be aware of the limitations for available ADS in the vehicle which is provided in the operational design domain (ODD) document. The document may educate the car user about certain ADS domains such as type of roadway (e.g., interstate, local, etc.), or geographic area (city, mountain, etc.), speed range, environmental conditions (daytime/nighttime, weather, etc.) and other domain restrictions.
Various circumstances occur during a driving task which requires either input from the driver or ADS directions. The object and event detection and response (OEDR) function is to inspect other vehicles, pedestrians, animals, and road inventory that may have impacts on the safe maneuvering of the vehicle. It is also responsible for a wide range of foreseeable events including emergency vehicles, breakdown scenarios, temporary work zone areas, and other special conditions such as traffic police directing vehicles, detours, etc. The OEDR functionality can divided into two types of driving based on the behavioral competencies. The operations of ADS during ‘Normal Driving’ routinely encounter tasks such as lane-keeping, following another vehicle, obeying traffic laws, road ethics, and responding to other vehicles or risks. It depends on the individual capability of each ADS, its ODD, and designated fallback (minimal risk condition) methods. Another type is ‘Crash Avoidance Capability—Hazards’ in which the ODD and ADS should have been trained in a way that it can address the pre-crash scenarios such as vehicle control loss, crossing-path crashed, lane-change/merge failures, head-on, wrong-way travels, roadway departures, low-speeds, and parking maneuvers. The entities are encouraged to assess, validate, evaluate, and document the OEDR functionality in the car.
In the events where ADS malfunctions during driving or it is operating out of the limits of ODD, the designed ADS procedures should perform necessary actions to either operate safely or with minimal risk condition or otherwise alerts the human driver to regain complete control of the car [33]. The ADS fallback actions should also dictate the circumstances where errors occurred during human driving and/or during poor decision-making. The decision of a minimal risk condition requiring the vehicle to stop safely depends upon the given extent of the failure. The entities are encouraged to assess, validate, evaluate, and document the fallback functionality in the events of ADS failures.
Since the scope, technology, and competencies for ADS varies in terms of safety automation, a validation method should be developed to mitigate safety risks. Several simulations and calibration on test tracks and roadways can be performed to infer the expected performance during normal operations. The entities should follow the NHTSA, ISO, SAE International, and other industry standards while developing and performing validation criteria.
The communication between the vehicle’s ADS system and the driver is critically important in the case of autonomous vehicles. The human-machine interface (HMI) enables the user to know the current status of each ADS module [45]. HMI’s role of interaction varies depending upon the current automation level of autonomous cars. For example, a Level 3 vehicle would require certain attention from the driver against each request made by the system to take back driving responsibilities. Similarly, for higher automation level i.e., Level 4 or 5 vehicles operating with or without an operator would require continuous ADS status updates to the remote correspondent authority. At a minimum, ADS should inform the occupant or the operator about the status, current ADS mode, malfunction, the transition from ADS to manual driving. The entities are advised to follow and apply the relevant industry standards and guidelines.
Although vehicles equipped with advanced ADS component enjoys the benefits of convenient driving yet cybersecurity attacks increase the severity of vehicle safety and driver’s privacy. The entities must follow a systematic engineering approach to minimize the issues of vehicle safety and security for each ADS. NHTSA advises developing robust documentation that must list the actions, changes in design, relevant testing against potential security threats, and also how the cybersecurity consideration is considered to protect ADS from potential failures. Further, a collaborative industry approach can aid in understanding the routine cybersecurity incidents, consumer reporting, external security breach, and learning from other industries experiencing cyber vulnerabilities.
It is expected to have a mixed fleet of vehicles on the public roadways for an extended period of time. Some of the vehicles would have ADS technology whereas the rest would function through manual driving and relies on human inputs. In the event of a crash between ADS-equipped and non-operating ADS vehicles, occupant safety must be assured through the vehicle protection system. The ADS must sense the possible event of a crash in advance and activates a protection system to protect the occupants.
In the event of an incident occurrence, ADS should be able to return to a safe state immediately by performing necessary measures such as disconnecting power, shutting down vehicle fuel systems, moving a vehicle to a safe refuge, as well as generating an on-spot crash report and delivering it to the collision notification center by relevant communication means. The crash documentation would enable the entities to improve the ADS system efficiency and ensure overall vehicle safety after repairing the damaged ADS technologies.
The continuous improvement of ADS technology is possible when well-documented vehicle crash data is recorded by the relevant agencies. The entities should collect roadway data for fatal/nonfatal injury crashes, total breakdown of the vehicle that requires towing, the damage that disturbs in-vehicle power transmission, minor accident allowing the vehicle to carry on driving task with safety and other damage for infrastructure elements. Additionally, learning from malfunctions, degradations, or failures of the ADS component during testing, validating, and technology development should also be recorded which can later be utilized to inspect the cause of future crashes. Finally, the vehicles involved in a crash due to ADS errors must record minimum available information so that the circumstances of the crash can be reconstructed.
The user of ADSs needs to be supervised, trained, and educated for its desired functions, as the overall benefit can only be achieved by having a firm understanding of it. The entities are encouraged to conduct a consumer teaching program that may cover topics such as ADSs’ functional intent, operational parameters, ODD, HMI, fallback, and limitations. Further, on-road, or on-track, or virtual reality sessions can be conducted before the consumer release [45]. As the concept of ADS by NHTSA is still in the development stage and very few safety facts are published by the car manufacturers or other authorities on the current status of safety items, further studies on related technologies are still in urgent demand.
3.3. AVs Legislation, Regulations and Deployment by State and Federal Authorities
The entities should design ADSs to maintain the applicability of the traffic regulations inside the region of operations e.g., federal, state, and local laws [33]. Certain special scenarios could occur on public roadways such as a broken-down vehicle on the road where a human driver may temporarily break the laws by crossing double lines. Therefore, it is expected that the ADS-equipped vehicle is trained in a way that can handle such special events during driving. Finally, any revisions or updates in the current traffic laws by state, federal, and local agencies should be depicted in the ADSs to address the required series of actions.
According to the National Conference of State Legislatures (NCSL), 29 states have enacted the legislation for autonomous vehicles, whereas state governors from 11 states have issued executive orders regarding the self-driving act. The first state to authorize the operations of the autonomous vehicle was Nevada back in 2011. Similarly, in 2012, Florida passed the initial legislation to encourage the safe development, evaluation, and operation of autonomous car technology on public roads where the state does not directly regulate the operations and testing of autonomous technology. Later in 2016, the law further expands to allow the research work for driverless cars. From 2015 to 2018, state governors of Arizona, Delaware, Hawaii, Idaho, Illinois, Maine, Massachusetts, Minnesota, Ohio, Washington, and Wisconsin passed the ‘executive orders’ directing the state authorities to take necessary steps for testing, deploying, and setting up special committees for autonomous vehicles (AVs) and connected autonomous vehicle (CAVs) technologies on the public roads of the state [53]. A complete database of autonomous vehicle legislations including the recent updates in the laws by certain states is made available online at the web page of NCSL.
The USDOT role in the research of vehicle automation is focused on areas such as removing barriers for the vehicle and infrastructure innovations, evaluating the impacts of the proposed technology in the context of safety, and addressing the concerns regarding market failures as well as public expectations. The latest developments of cooperative automation and connectivity deploy over 70 active projects of V2X communications (the surrounding environment) communications using a 5.9 GHz band. As per the USDOT estimates, nearly 18,000 vehicles will be deployed with aftermarket V2X communications and around 1000 V2X infrastructure units would have been installed on the roadside. Additionally, the private sectors are working on cellular-V2X technology using the DSRC channel [54]. Figure 5 shows the deployment of infrastructure units and in-vehicle units. Most of the operational and planned projects are deployed in the western regions such as Michigan state has the maximum number of 11 operational projects. The V2X technology has been implemented massively across the nation as a result of a huge investment of $700 million by USDOT in the research and development of V2X through the partnership of state and local governments [54].
On the other hand, FHWA’s current research efforts are to assess the technical complications of cooperative automation (both infrastructure and vehicle-vehicle communications), traffic modeling/simulations, safety evaluation of proposed prototypes, smooth flow of traffic, and fuel efficiency [54,55,56,57,58,59]. The cooperative automation includes the SAE Level 1 and Level 2 technologies such as vehicle platooning, reducing delays through speed harmonization, minimizing traffic disruptions through cooperative lane-change, merge, and coordination between signalized intersection through the data available by Signal Phase and Timing (SPaT) enabling automated cars to enter and depart from the intersection with safety and minimal stopped delay [54].
4. Impacts of AVs and CAVs on Traffic Flow
The previous sections introduce prominent ADAS and ADS technologies and considerations for vehicle and infrastructure automation. This section reviews the impacts of AVs and CAVs on some significant traffic engineering parameters such as road capacity, delays, travel times, cost factors, and safety. The advent of AVs and CAVs will bring potential benefits to the traffic engineering perspectives along with the number of unique challenges for the users and relevant authorities. The expected AVs market penetration falls between 50% for the 2050s and not more than 75% by the 2060s according to a study by the Victoria Transport Policy Institute [1]. It indicates that the share of autonomous vehicles in the current market will fluctuate for a longer period of time resulting in mixed-heterogenous traffic of automatic and conventional cars.
4.1. Implications of AVs and CAVs on Traffic Speed, Capacity, and Travel Times
The AVs would initially maintain larger headways compared to traditional human-cars due to conservative behavior. As a consequence, the road capacity would reduce, and the average speed of overall traffic would slow down at the first stage. However, the increasing penetration of AVs and cooperative driving (e.g., platooning) will eventually upgrade the process by improving the mobility, safety, and environmental gains [60,61,62,63]. The human-driving has a stochastic behavior and is modeled more hesitant to accept risk. The AV/CAV on the opposite has deterministic driving behavior and the driving dynamics are predictable. Hence, the calibration parameters and other constants used in the existing car-following models (e.g., Wiedemann psycho-physical car-following model 1974 or 1999) need to be revised for autonomous cars [60].
The AVs will have the potential to improve the capacities of urban intersection network, freeways, merge/diverge, and weaving segments by keeping constant parameters, and faster speeds with tightly spaced vehicles. The maximum throughput is the utmost network capacity at an optimal density (i.e., minimum vehicle headways) after that a bottleneck is formed. If there is further increment in traffic after the optimal density is achieved, headways tend to reduce and become more constant (i.e., smaller standard deviation). In due course, it will approach jam density and hence both the flow and speed will become zero [64]. It is obvious that the impacts of AVs and CAVs on the freeway capacity and operations are dependent on the fleet mix, market penetration, lateral and longitudinal communication, and other car specific parameters such as desired acceleration/deceleration, speed, and headways. The maximum throughput (i.e., 2000 v/h/ln for a freeway) will increase when autonomous cars maintain shorter gaps and decrease with larger headways [64].
Another study evaluated the effectiveness of collaborative merging behaviors of connected vehicles in freeway ramp operations. Using PTV VISSIM, MATLAB, and Car2X module, an optimization-based ramp control approach and gradual speed limit control approach was developed. Subsequently, the proposed operational strategies were implemented in a simulation platform to assess average speed, delay, and throughout against no control strategy (default behavior). The results indicated that the control strategy effectively coordinated all merging vehicles at freeway on-ramps and significantly improves the network safety [65].
Atkins conducted a detailed research study on the impacts of CAVs on traffic flow for the UK road network. CAVs are modeled for different longitudinal (i.e., Wiedemann 99 model parameters), lateral (i.e., lane-changing parameters), and other driving behavior parameters (i.e., the observed vehicle, look ahead distance, and look back distances). The benefits of CAVs towards average delay and the average journey time is calculated for different market penetration as shown in Table 4. The strategic road network consists of motorways, free-flow, and controlled intersections, as well as merges and diverges sections. The base scenario has a 0% CAVs fleet whereas others have a combination of Level II (driver assistance) to Level IV (full automation) CAVs fleet. The average delay and journey time is significantly improved by 40% and 11.2% respectively for 100% market penetration of Level IV CAVs. Further, the result strongly suggests a higher percentage of market penetration is required to gain the benefit of vehicle automation. For instance, at 25% CAVs penetration, the improvements are negligible [66].
A study by peter et al. investigated the impacts of increasing AV’s penetration rates for three different desired speeds. The VISSIM network consists of single-lane link with linearly distributed desired speeds between minimum and maximum values such as 50 km/h (48–52), 100 km/h (99–101), and 130 km/h (125–135). The market penetration increases from 0–100% with 10% increasing intervals. The trends showed that higher capacities can be achieved at higher speeds. Additionally, the increase in capacity is nearly linear for up to 0–60% AVs penetration whereas the gap slightly increases for higher penetration rates (>60%) [61]. Therefore, it is observed that the AVs and CAVs have the potential to improve the traffic capacity and reduce congestions when these vehicles maintain shorter safety gaps and higher speeds. However, higher penetration rates of CAVs of above 40% will be needed to achieve a significant reduction in traffic delays and journey time.
4.2. Estimating Traffic Flow Benefits for ACC and CACC Models
Several studies have investigated the potential benefits of autonomous and connected cars for varying market penetrations and time gaps (i.e., headway) utilizing techniques such as ACC and CACC through microscopic traffic simulation. The network speed can be increased due to ACC in congested conditions even at a lower market penetration of 20% yet some bottlenecks can be formed at locations where drivers turned off their ACC systems [66]. In 2007, Kesting et al. analyzed the ACC results for travel-time delay and found that using ACC at 10 percent market penetration, the individual driver’s maximum travel-time delay was reduced to 30 percent, and the cumulative delay-time was reduced to 50 percent. Additionally, the simulation results observed a significant reduction in queue lengths [67].
However, not all the researchers found positive impacts of ACC on the traffic flow. For example, Shladover et al. used the AIMSUN simulation software and modeled the traffic dynamics using ACC with varying market penetrations. The study showed that conventional ACC does not have any positive impacts on the highway capacity as the drivers behave in a similar pattern to manual driving where a typical system gap is maintained [26]. A study by Davis in 2004 showed that at 10 percent or less market penetration and high speeds, congestions would occur. Further, positive impacts are only gained after reaching at least a 20 percent penetration rate, while a measurably reduced travel time is only found at a 50 percent rate [68]. In a simulation experiment by Calvert et al., it was found that improvements in traffic flow are observed for market penetration above 70% [69]. Therefore, according to the available literature review on the impacts of ACC over traffic capacity, congestion, delays, and speeds advocate that potential benefits are only available at higher market penetration rates.
Conversely, CACC has both positive and negative impacts on varying market penetration as found by different researchers. A study used MIXIC traffic-flow simulation to analyze the impacts on traffic after the introduction of CACC. The study reveals that the variance of the vehicle’s speed in one lane and speed differences between each lane were decreased. The same researcher also found that road capacity decreased with the decreasing rates of CACC market penetrations which is unlikely to the expectation of roadway capacity as shorter and uniform headways on actual increases the capacity [70]. It is however uncertain that this result is because of the CACC implementation or the limitation of the mandatory lane-change model of the MIXIC [32].
In contrast, Shladover et al. founded a substantial increment in the roadway capacity. The experiment consists of all vehicles equipped with the CACC system and maintains a 0.5 s time gap, the outcomes showed the potential increase of capacity up to 4400 v/h/ln [71,72]. Another study by Van Arem et al. uses the MIXIC simulation model to analyze the traffic stability and throughput for the shockwave effect by limiting the highway capacity (i.e., dropping a four-lane highway to a three-lane highway). The experiment examined the impacts of CACC by incorporating good vehicle dynamics and driving behavior [27]. The study proved that the shockwave effect could be mitigated as well as the average speed could be increased for higher market penetrations of CACC such as greater than 60 percent.
In a similar pattern, Zhao et al. considered a simulation of manual, ACC, and CACC vehicles in VISSIM to analyze the reaction towards shockwaves and benefits of a platoon (i.e., 6 CACC vehicles with a closed time-gap). The formation of the platoon is simulated by an API (application programming interface) where several maneuvers are modeled such as forming, splitting, dismissing, and joining a platoon. The results indicated that lane capacity improves significantly with the increasing penetration of CACC vehicles [28].
In 2012, Shladover et al. conducted another AIMSUN simulation study that consists of manually driven, ACC, CACC, and HIA (Here I am, a manually driven vehicle equipped with DSRC). The HIA vehicle is capable of sharing location and speed information with other vehicles, therefore it acts as a CACC once followed by another CACC. The message transmitted by the HIA vehicle follows the same proposed strategy by USDOT where all vehicles would be at least equipped with a vehicle awareness device (VAD) that can broadcast GPS (actual location), speed, and heading information. By doing this, HIA vehicles can be treated as a leader to the CACC platoon [26]. The CACC vehicles assumed that the drivers hold the capability of higher dynamic response i.e., actual gap that the driver selects in a field testing [73,74,75], which provides them the confidence to follow the vehicles safely with shorter gap settings. The simulation results showed that the per lane capacity would increase from 2000 to 4000 vehicles. Another point to note, even at low CACC penetration, benefits can be achieved ensuring that the rest of the manually driven vehicles are equipped with VAD. The maximum per lane capacity is logged about 3389 vehicles at 90 percent CACC and 10 percent ACC in the absence of manual vehicles [26]. Further, research indicated that the platooning of vehicles could increase the highway lane capacity by up to 500 percent [76].
Finally, some studies investigated the capacity benefits from CACC towards specific events such as merging, on-ramps, and HOV (high-occupancy vehicle) lanes. For example, a concept of cooperative merging was introduced by Davis, where he found that if the on-ramp traffic demand is moderate, the cooperative merging improves the throughput by 20 percent as well as increases up to 2.2 miles in distance traveled per 600 s for a 50 percent penetration rate [77]. Another study found significant improvement in the highway capacity when CACC vehicles were given priority access to HOV lanes with a penetration rate of as low as 20 percent [78]. The optimum headway setting for an effective CACC system was analyzed by Calvert et al. The study modeled the initial default headway of 1.2 s and later discovered that the optimum headway for a CACC system is 0.9 s. The system shows significant improvement for market penetration between 50 percent to 75 percent [79]. The review of the literature on CACC technology shows that the roadway and lane capacity can be improved with the increasing penetration rates of CACC vehicles and shorter time gap. The traffic flow benefits of CACC in the bottleneck locations such as merging, diverging and weaving segments are achieveable through cooperative merging and shockwave effects can be alleviated at higher penetration rates of CACC vehicles.
4.3. Estimating Intersection Capacity Benefits through V2V and V2I Communications
The recent developments in the area of ITS and wireless communications have equipped the road users with more awareness about the current and future traffic conditions such as live traffic congestion maps, navigations maps, detailed routes including turn by turn information to reach the destination, detours, the current speed of the driver, position of the car, estimated travel times of a complete journey, and any other blockage or incident along the routes. In a similar pattern, many opportunities can be availed by the drivers through real-time V2V and V2I communications. Some of the V2V applications are already discussed in the previous discussion such as ACC and CACC. Another example of V2V communication, for instance, the drivers have the updates of an upstream traffic incident or hazard. The drivers can calculate expected travel time from their position and the incident [32], or in other cases, a driver can decelerate in advance to maintain the desired safety distance and to avoid any head-on collision. Using the same concept of V2V communications, Yeo et al. proposed a hazard alert system where a system provides lane-specific information to the vehicles. The proposed system found a potential decrease in traffic congestion at higher penetration rates [80].
Similarly, the examples of V2I applications can include the communications between the vehicle and the traffic signal lights, traffic regulatory signs, VMS, dictations from road embedded sensors, and other roadside units’ inventory. Several researchers evaluated the operational benefits of V2I communication for improving the intersection capacity, safety, fuel consumption, and CO2 emissions [81,82,83,84]. A study evaluated the effectiveness of V2I communications towards the intersection capacity and safety. The vehicles were modeled using the VISSIM COM (component object model) application where a vehicle records the status of a traffic light and adjusts its speed decision before reaching the traffic signal ahead to improve the intersection delay, reduce the number of stops, and increase the overall throughput at the junction [9].
Another sensitivity study established a novel coordination method for intersection management in a connected vehicle environment. It divides the road network into three different regions such as buffer area, core area (e.g., junction box), and free driving. Additionally, a buffer-assignment mechanism is developed to communicate with the AVs for the adjustment of its entry time and corresponding speed in the intersection core area. The VISSIM simulation results show a significant reduction in the number of stops and travel delays of up to 77% and a substantial reduction in fuel consumption [85]. Therefore, it explains that both V2V and V2I have potential benefits towards the improvement of the system’s capacity and sustainability. A typical journey through an urban road network or a freeway network involves several complicated scenarios that require human inputs at every stage. Therefore, a system that combines V2V and V2I communication can ensure significant improvement in vehicle throughput and safety benefits.
4.4. Safety Benefits of AVs and CAVs
The previous sections outlined several initiatives undertook or under consideration by researchers, and federal/state authorities for the safe movements of connected autonomous vehicles through the roadways. This section discusses the future safety benefits of self-driving vehicles. As almost 90% of the car crashes involved human errors [86], self-driving cars can reduce crash rates and insurance costs by 90% [87], however, this does not include associated additional risk for the innovating technologies [36,88]. The Texas Department of Transportation (TxDOT) evaluates the potential gains of vehicle automation and communications on the safety and operations of the roadway network. The study developed a document that can be used as the best practice for TxDOT and other agencies for the adoption of CAV technologies for the long term [36]. This review paper is focusing only on the simulation-based surrogate safety benefits of AVs and CAVs. Researchers have used a safety sensitivity analysis tool named ‘Safety Surrogate Assessment Model (SSAM)’ developed by FHWA [89] to evaluate the crash severity and number of crashes.
A study by Mark et al. evaluated the safety benefits of AVs for a signalized intersection and roundabout for varying market penetration. The results show significant safety improvement even at shorter headways. For signalized intersection, the number of conflicts reduces by 20% to 65% for the market penetration ranging from 50% to 100%. Similarly, for the roundabout, the conflicts are reduced by 29% up to 64% with full market penetration [90]. Another study evaluates the effectiveness of communication in mixed traffic i.e., CAVs and conventional vehicles when passing an intersection. The CAVs share their information with surrounding connected vehicles near an intersection and pass the intersection with improved efficiency and safety [91].
Another researcher developed a decision-making CAV control algorithm using VISSIM API to control longitudinal and lateral decisions on motorways operations. The results showed potential improvement in safety and traffic flow even at lower market penetration e.g., 12–47% conflicts reduction for 25% CAVs penetration whereas 90–94% conflicts reduction for 100% CAVs penetration [92]. In 2016, Martin evaluated the safety benefits for connected vehicles using two applications, (1) cumulative travel time (CTT) intersection control algorithm for V2I communication and (2) Platooning for V2V communications. VISSIM and SSAM tools evaluated the changes in the level of safety for connected vehicle applications [9]. The results showed significant improvement in safety for CACC and CTT applications. Therefore, it is revealed that the increasing penetration rate of AVs and CAVs have the potential to reduce vehicular crashes and conflicts around various road infrastructure systems such as traffic intersections, and roundabouts given that they maintain effective communication with the nearby vehicles and infrastructure.
5. Conclusions and Future Research Opportunities
This paper reviews the ADAS technologies and ADS safety and regulation considerations for autonomous cars, connected cars, and infrastructure automation. For example, vehicle-to-vehicle communication, vehicle-to-infrastructure communication, adaptive, and cooperative adaptive cruise control, RADAR and LiDAR technology, and others. Accordingly, the impacts of AVs and CAVs on the traffic flow are reviewed in terms of traffic safety, road capacity, delays, speed, and, travel times for varying market penetration rates using micro-simulation tools. The reviewed studies show promising benefits of automation advancements for AVs and CAVs as compare to the existing conventional manual-driven vehicles.
Based on this review, it can be seen that the communication of CAVs are of critical importance. Currently, the technologies on CAVs have considerable developments in V2V but have very limited considerations on V2I. In the future, more researches are needed to integrate the V2I into the CAV technologies and simulations to further explore the benefits of AVs and CAVs.
The content of this review paper is mainly limited to the technology advancement made in the area of connected autonomous vehicles for the period of up to 2019 and the development period from 2020 and onwards has not been covered during the review. The evolving changes in several ITS technologies such as LiDAR, RADAR, DSRC, and driver assistance can be further explained in the future work. Furthermore, since this is a theoretical study so no field work, practical experiment & simulation experiments were performed in this research. Lastly, this review paper covers the relevant legislations and regulations from the United States only.
Author Contributions
Conceptualization, methodology, formal analysis, writing—original draft preparation, H.U.A.; writing—review and editing, supervision, project administration, funding acquisition, Y.H.; project administration, funding acquisition, P.L.; supervision, R.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding or This research was funded by the U.S. Department of Transportation under the agreement of No. 69A3551747108 through MPC project No. 685. Information regarding the funder and the funding number should be provided. Please check the accuracy of funding data and any other information carefully.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Litman, T. Autonomous Vehicle Implementation Predictions; Victoria Transport Policy Institute: Victoria, BC, Canada, 2017. [Google Scholar]
- ATKINS. Research on the Impacts of Connected and Autonomous Vehicles (CAVs) on Traffic Flow, Stage 2: Traffic Modelling and Analysis Technical Report, Department for Transport, 2016; ATKINS: London, UK, 2016. [Google Scholar]
- Gibbs, S. Google’s Self-Driving Car: How Does It Work and When Can We Drive One? Guardian 2014, 5–29. Available online: https://www.theguardian.com/technology/2014/may/28/google-self-driving-car-how-does-it-work (accessed on 14 March 2022).
- Duarte, F.; Ratti, C. The impact of autonomous vehicles on cities: A review. J. Urban Technol. 2018, 25, 3–18. [Google Scholar] [CrossRef]
- Eluru, N.; Choudhury, C.F. Impact of shared and autonomous vehicles on travel behavior. Transportation 2019, 46, 1971–1974. [Google Scholar] [CrossRef] [Green Version]
- Hamadneh, J.; Esztergár-Kiss, D. Impacts of shared autonomous vehicles on the travelers’ mobility. In Proceedings of the 2019 6th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Cracow, Poland, 5–7 June 2019; pp. 1–9. [Google Scholar]
- Gong, S.; Du, L. Cooperative platoon control for a mixed traffic flow including human drive vehicles and connected and autonomous vehicles. Transp. Res. Part B Methodol. 2018, 116, 25–61. [Google Scholar] [CrossRef]
- Intelligent Transportation—ITS CANADA. Available online: https://www.itscanada.ca/it/index.html (accessed on 14 March 2022).
- Fyfe, M.R. Safety Evaluation of Connected Vehicle Applications Using Micro-Simulation. Doctoral Dissertation, University of British Columbia, Vancouver, BC, Canada, 2016. [Google Scholar]
- Richard, C.M.; Morgan, J.F.; Bacon, L.P.; Graving, J.; Divekar, G.; Lichty, M.G. Multiple Sources of Safety Information from v2v and v2i: Redundancy, Decision Making, and Trust—Safety Message Design Report; United States, Federal Highway Administration, Office of Safety Research and Technology: Washington, DC, USA, 2015. [Google Scholar]
- Zhu, F. Modeling, Control, and Impact Analysis of The Next Generation Transportation System. Doctoral Dissertation, Purdue University, West Lafayette, IN, USA, 2016. [Google Scholar]
- Silberg, G.; Wallace, R.; Matuszak, G.; Plessers, J.; Brower, C.; Subramanian, D. Self-driving cars: The next revolution. White Pap. KPMG LLP Cent. Automot. Res. 2012, 9, 132–146. [Google Scholar]
- Sakr, A.H.; Bansal, G. Cooperative localization via DSRC and multi-sensor multi-target track association. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 66–71. [Google Scholar]
- Zeng, X.; Balke, K.; Songchitruksa, P. Potential Connected Vehicle Applications to Enhance Mobility, Safety, and Environmental Security; Southwest Region University Transportation Center (US): College Station, TX, USA, 2012. [Google Scholar]
- SAE International. Dedicated Short Range Communications (DSRC) Message Set Dictionary; SAE International: Warrendale, PA, USA, 2016. [Google Scholar]
- Ahmed, H.U.; Huang, Y.; Lu, P. A Review of Car-Following Models and Modeling Tools for Human and Autonomous-Ready Driving Behaviors in Micro-Simulation. Smart Cities 2021, 4, 314–335. [Google Scholar] [CrossRef]
- Gazis, D.C.; Herman, R.; Rothery, R.W. Nonlinear follow-the-leader models of traffic flow. Oper. Res. 1961, 9, 545–567. [Google Scholar] [CrossRef]
- Gipps, P.G. Behavioral car-following model for computer simulation. Transp. Res. 1981, 15, 105–111. [Google Scholar] [CrossRef]
- Wiedemann, R. Simulation des StraBenverkehrsflusses; Schriftenreihe des Tnstituts fir Verkehrswesen der Universitiit Karlsruhe: Karlsruhe, Germany, 1974. [Google Scholar]
- Wiedemann, R.; Reiter, U. Microscopic traffic simulation: The simulation system MISSION, background and actual state. Proj. ICARUS (V1052) Final Rep. 1992, 2, 1–53. [Google Scholar]
- Lochrane, T. A New Multidimensional Psycho-Physical Framework for Modeling Car-Following in a Freeway Work Zone. Ph.D. Thesis, University of Central Florida, Orlando, FL, USA, 2014. [Google Scholar]
- Hidas, P. Modelling lane changing and merging in microscopic traffic simulation. Transp. Res. Part C Emerg. Technol. 2002, 10, 351–371. [Google Scholar] [CrossRef]
- Gipps, P.G. A model for the structure of lane-changing decisions. Transp. Res. Part B Methodol. 1986, 20, 403–414. [Google Scholar] [CrossRef]
- Sparmann, U. Spurwechselvorgänge auf Zweispurigen BABRichtungsfahrbahnen. ForschungStraßenbau und Straßenverkehrstechnik. Heft Forsch Strassenbau U Strassenverkehrstech 1978, 263, 106S. [Google Scholar]
- Hwang, S.Y.; Park, C.H. Modeling of the gap acceptance behavior at a merging section of urban freeway. In Proceedings of the Eastern Asia Society for Transportation Studies; Eastern Asia Society for Transportation (EASTS): Tokyo, Japan, 2005; p. e1656. [Google Scholar]
- Shladover, S.E.; Su, D.; Lu, X.-Y. Impacts of cooperative adaptive cruise control on freeway traffic flow. Transp. Res. Rec. 2012, 2324, 63–70. [Google Scholar] [CrossRef] [Green Version]
- Van Arem, B.; Van Driel, C.J.; Visser, R. The impact of cooperative adaptive cruise control on traffic-flow characteristics. IEEE Trans. Intell. Transp. Syst. 2006, 7, 429–436. [Google Scholar] [CrossRef] [Green Version]
- Zhao, L.; Sun, J. Simulation framework for vehicle platooning and car-following behaviors under connected-vehicle environment. Procedia-Soc. Behav. Sci. 2013, 96, 914–924. [Google Scholar] [CrossRef] [Green Version]
- PTV Group. PTV VISSIM 2020 Introduction to the COM API; PTV Group: Karlsruhe, Germany, 2019. [Google Scholar]
- Hasenjäger, M.; Wersing, H. Personalization in advanced driver assistance systems and autonomous vehicles: A review. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (itsc), Kanagawa, Japan, 16–19 October 2017; pp. 1–7. [Google Scholar]
- Automated Vehicles for Safety—The Evolution of Automated Safety Technologies. Available online: https://www.nhtsa.gov/technology-innovation/automated-vehicles-safety (accessed on 14 March 2022).
- Hunter, M.P.; Guin, A.; Rodgers, M.O.; Huang, Z.; Greenwood, A.T. Cooperative Vehicle–Highway Automation (CVHA) Technology: Simulation of Benefits and Operational Issues; United States, Federal Highway Administration: Washington, DC, USA, 2017. [Google Scholar]
- Lu, G.; Tomizuka, M. A laser scanning radar based autonomous lateral vehicle following control scheme for automated highways. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4 June 2003; pp. 30–35. [Google Scholar]
- Avadhanulu, M. An Introduction to Lasers Theory and Applications; S. Chand Publishing: New Delhi, India, 2001. [Google Scholar]
- Wei, J.; Snider, J.M.; Kim, J.; Dolan, J.M.; Rajkumar, R.; Litkouhi, B. Towards a viable autonomous driving research platform. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast City, Australia; 2013; pp. 763–770. [Google Scholar]
- Kockelman, K.; Avery, P.; Bansal, P.; Boyles, S.; Bujanovic, P.; Choudhary, T.; Clements, L.; Domnenko, G.; Fagnan, D.; Helsel, J. Implications of Connected and Automated Vehicles on the Safety and Operations of Roadway Networks; Final Report; Texas Department of Transportation: Austin, TX, USA, 2016. [Google Scholar]
- Johnson, L. Fed Wants More Car Safety Tech. 2012. Available online: https://www.americanprogress.org/article/5-ways-the-obama-administration-revived-the-auto-industry-by-reducing-oil-use/ (accessed on 15 May 2021).
- Van Arem, B.; Tampere, C.M.; Malone, K. Modelling traffic flows with intelligent cars and intelligent roads. In Proceedings of the IEEE IV2003 Intelligent Vehicles Symposium. Proceedings (Cat. No. 03TH8683), Columbus, OH, USA; 2003; pp. 456–461. [Google Scholar]
- Takahashi, Y.; Komoguchi, T.; Seki, M.; Patel, N.; Auner, D.; Campbell, B. Alert Method for Rear Cross Traffic Alert System in North America; 0148-7191; SAE Technical Paper: Warrendale, PA, USA, 2013. [Google Scholar]
- National Highway Traffic Safety Administration. Backover Crash Avoidance Technologies: FMVSS No. 111 Final Regulatory Impact Analysis; National Highway Traffic Safety Administration: Washington, DC, USA, 2014. [Google Scholar]
- Kidd, D.G.; McCartt, A.T. Differences in glance behavior between drivers using a rearview camera, parking sensor system, both technologies, or no technology during low-speed parking maneuvers. Accid. Anal. Prev. 2016, 87, 92–101. [Google Scholar] [CrossRef]
- Cicchino, J.B. Effectiveness of forward collision warning and autonomous emergency braking systems in reducing front-to-rear crash rates. Accid. Anal. Prev. 2017, 99, 142–152. [Google Scholar] [CrossRef]
- Isaksson-Hellman, I.; Lindman, M. Evaluation of rear-end collision avoidance technologies based on real world crash data. In Proceedings of the Future Active Safety Technology Towards zero traffic accidents (FASTzero), Gothenburg, Sweden, 19 August 2015; pp. 9–11. [Google Scholar]
- Ranney, T.A.; Garrott, W.R.; Goodman, M.J. NHTSA Driver Distraction Research: Past, Present, and Future; CiteseerX: State College, PA, USA, 2001. [Google Scholar]
- National Highway Traffic Safety Administration. Automated Driving Systems 2.0: A Vision for Safety; US Department of Transportation, DOT HS: Washington, DC, USA, 2017; Volume 812, p. 442. [Google Scholar]
- National Highway Traffic Safety Administration. Preliminary Statement of Policy Concerning Automated Vehicles; National Highway Traffic Safety Administration: Washington, DC, USA, 2013; pp. 1–14. [Google Scholar]
- Mervis, J. Are We Going Too Fast on Driverless Cars. Science 2017. Available online: https://www.science.org/content/article/are-we-going-too-fast-driverless-cars (accessed on 14 May 2021). [CrossRef]
- Bergen, M. Alphabet Launches the First Taxi Service with no Human Drivers. Bloom. Technol. 2017. Available online: https://Bloom.Bg/2ea2dml (accessed on 15 May 2021).
- Lee, T.B. Fully Driverless Cars Could be Months Away. Ars Tech. 2017, 3. Available online: https://arstechnica.com/cars/2017/10/report-waymo-aiming-to-launch-commercial-driverless-service-this-year/ (accessed on 15 May 2021).
- Simonite, T. Prepare to be Underwhelmed by 2021’s Autonomous Cars. MIT Technol. Rev. 2016. Available online: https://www.technologyreview.com/2016/08/23/157929/prepare-to-be-underwhelmed-by-2021s-autonomous-cars/ (accessed on 15 May 2021).
- Committee, S.O.-R.A.V.S. Taxonomy and Definitions for Terms Related to Driving Automation Systems for on-Road Motor Vehicles; SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- SAE. Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems; J3016; SAE International Standard: Warrendale, PA, USA, 2014. [Google Scholar]
- Vehicles, A. Autonomous Vehicles/Self-Driving Vehicles Enacted Legislation. 2020. Available online: https://www.ncsl.org/research/transportation/autonomous-vehicles-self-driving-vehicles-enacted-legislation.aspx (accessed on 15 May 2021).
- Dot, U. Preparing for the Future of Transportation: Automated Vehicles 3.0. US. Available online: https://www.transportation.gov/av/3 (accessed on 15 May 2021).
- McGuckin, T.; Lambert, J.; Newton, D.; Pearmine, A.; Hubbard, E.; Sheehan, R. Leveraging the Promise of Connected and Autonomous Vehicles to Improve Integrated Corridor Management and Operations: A Primer; United States, Federal Highway Administration: Washington, DC, USA, 2017. [Google Scholar]
- Noch, M. Are We Ready for Connected and Automated Vehicles? Public Roads 2018, 82, FHWA-HRT-18-003. [Google Scholar]
- Federal Highway Administration, O.O.P.A. Dialogue on Highway Automation. Def. Transp. J. 2018, 74, 23. [Google Scholar]
- Wright, J.; Garrett, J.K.; Hill, C.J.; Krueger, G.D.; Evans, J.H.; Andrews, S.; Wilson, C.; Rajbhandari, R.; Burkhard, B. National Connected Vehicle Field Infrastructure Footprint Analysis: Final Report. Fed. Highw. Adm. ITS-JPO 2014, 159. [Google Scholar]
- Andrews, S. Deployment Strategy for Rural Connected Vehicle Systems; Final Report to Michigan DOT, ENTERPRISE Pooled Fund Study TPF-5(231); Michigan DOT: Lansing, MI, USA, 2014. [Google Scholar]
- Tettamanti, T.; Varga, I.; Szalay, Z. Impacts of autonomous cars from a traffic engineering perspective. Period. Polytech. Transp. Eng. 2016, 44, 244–250. [Google Scholar] [CrossRef] [Green Version]
- Sukennik, P.; Lohmiller, J.; Schlaich, J. Simulation-Based Forecasting the Impacts of Autonomous Driving. In Proceedings of the International Symposium of Transport Simulation (ISTS’18) and the International Workshop on Traffic Data Collection and its Standardization (IWTDCS’18), Matsuyama, Japan, 6–8 August 2018. [Google Scholar]
- Songchitruksa, P.; Bibeka, A.; Lin, L.I.; Zhang, Y. Incorporating Driver Behaviors into Connected and Automated Vehicle Simulation; Center for Advancing Transportation Leadership and Safety (ATLAS Center): Ann Arbor, MI, USA, 2016. [Google Scholar]
- Seraj, M.; Li, J.; Qiu, Z. Modeling microscopic car-following strategy of mixed traffic to identify optimal platoon configurations for multiobjective decision-making. J. Adv. Transp. 2018, 2018, 7835010. [Google Scholar] [CrossRef]
- Bierstedt, J.; Gooze, A.; Gray, C.; Peterman, J.; Raykin, L.; Walters, J. Effects of next-generation vehicles on travel demand and highway capacity. FP Think Work. Group 2014, 8, 10–11. [Google Scholar]
- Xie, Y.; Zhang, H.; Gartner, N.H.; Arsava, T. Collaborative merging strategy for freeway ramp operations in a connected and autonomous vehicles environment. J. Intell. Transp. Syst. 2017, 21, 136–147. [Google Scholar] [CrossRef]
- Elefteriadou, L.; Martin, B.; Simmerman, T.; Hale, D. Using Microsimulation to Evaluate the Effects of Advanced Vehicle Technologies on Congestion; University of Florida, Center for Multimodal Solutions for Congestion Mitigation: Gainesville, FL, USA, 2011. [Google Scholar]
- Kesting, A.; Treiber, M.; Schönhof, M.; Kranke, F.; Helbing, D. Jam-avoiding adaptive cruise control (ACC) and its impact on traffic dynamics. In Traffic and Granular Flow’05; Springer: Berlin, Germany, 2007; pp. 633–643. [Google Scholar]
- Davis, L. Effect of adaptive cruise control systems on traffic flow. Phys. Rev. E 2004, 69, 066110. [Google Scholar] [CrossRef]
- Calvert, S.; Schakel, W.; Van Lint, J. Will automated vehicles negatively impact traffic flow? J. Adv. Transp. 2017, 2017, 3082781. [Google Scholar] [CrossRef]
- Alkim, T.P.; Schuurman, H.; Tampère, C. Effects of external cruise control and co-operative following on highways: An analysis with the MIXIC traffic simulation model. In Proceedings of the IEEE Intelligent Vehicles Symposium 2000 (Cat. No. 00TH8511), Dearborn, MI, USA, 5 October 2000; pp. 474–479. [Google Scholar]
- Shladover, S.; VanderWerf, J.; Miller, M.A.; Kourjanskaia, N.; Krishnan, H. Development and Performance Evaluation of AVCSS Deployment Sequences to Advance from Today’s Driving Environment to Full Automation; California PATH: Berkeley, CA, USA, 2001. [Google Scholar]
- Vander Werf, J.; Shladover, S.E.; Miller, M.A.; Kourjanskaia, N. Effects of adaptive cruise control systems on highway traffic flow capacity. Transp. Res. Rec. 2002, 1800, 78–84. [Google Scholar] [CrossRef]
- Nowakowski, C.; Shladover, S.E.; Cody, D.; Bu, F.; O’Connell, J.; Spring, J.; Dickey, S.; Nelson, D. Cooperative Adaptive Cruise Control: Testing Drivers’ Choices of Following Distances; Final Report DTFH61-07-H-00038329; CALTRANS: Sacramento, CA, USA, 2011; pp. 1055–1425. [Google Scholar]
- Nowakowski, C.; O’Connell, J.; Shladover, S.E.; Cody, D. Cooperative adaptive cruise control: Driver acceptance of following gap settings less than one second. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, San Francisco, CA, USA, 1 October 2010; pp. 2033–2037. [Google Scholar]
- Shladover, S.E.; Nowakowski, C.; O’Connell, J.; Cody, D. Cooperative adaptive cruise control: Driver selection of car-following gaps. In Proceedings of the 17th ITS World Congress ITS, Busan, Korea, 6 January 2011. [Google Scholar]
- Fernandes, P.; Nunes, U. Platooning with IVC-enabled autonomous vehicles: Strategies to mitigate communication delays, improve safety and traffic flow. IEEE Trans. Intell. Transp. Syst. 2012, 13, 91–106. [Google Scholar] [CrossRef]
- Davis, L. Effect of adaptive cruise control systems on mixed traffic flow near an on-ramp. Phys. A Stat. Mech. Appl. 2007, 379, 274–290. [Google Scholar] [CrossRef] [Green Version]
- Arnaout, G.M.; Bowling, S. A progressive deployment strategy for cooperative adaptive cruise control to improve traffic dynamics. Int. J. Autom. Comput. 2014, 11, 10–18. [Google Scholar] [CrossRef] [Green Version]
- Calvert, S.C.; van den Broek, T.A.; van Noort, M. Cooperative driving in mixed traffic networks—Optimizing for performance. In Proceedings of the 2012 IEEE Intelligent Vehicles Symposium, Alcala De Henares, Spain, 3–7 June 2012; pp. 861–866. [Google Scholar]
- Yeo, H.; Shladover, S.E.; Krishnan, H.; Skabardonis, A. Microscopic traffic simulation of vehicle-to-vehicle hazard alerts on freeway. Transp. Res. Rec. 2010, 2189, 68–77. [Google Scholar] [CrossRef]
- Lee, J.; Park, B.; Malakorn, K.; So, J. Safety Assessment of Cooperative Vehicle Infrastructure System-Based Urban Traffic Control. In Proceedings of the 3rd International Conference on Road Safety and Simulation, Indianapolis, IN, USA, 14–16 September 2011. [Google Scholar]
- Wu, G.; Boriboonsomsin, K.; Zhang, W.-B.; Li, M.; Barth, M. Energy and emission benefit comparison of stationary and in-vehicle advanced driving alert systems. Transp. Res. Rec. 2010, 2189, 98–106. [Google Scholar] [CrossRef]
- Li, Z.; Chitturi, M.V.; Zheng, D.; Bill, A.R.; Noyce, D.A. Modeling reservation-based autonomous intersection control in VISSIM. Transp. Res. Rec. 2013, 2381, 81–90. [Google Scholar] [CrossRef] [Green Version]
- Martin-Gasulla, M.; Sukennik, P.; Lohmiller, J. Investigation of the impact on throughput of connected autonomous vehicles with headway based on the leading vehicle type. Transp. Res. Rec. 2019, 2673, 617–626. [Google Scholar] [CrossRef]
- Lin, P.; Liu, J.; Jin, P.J.; Ran, B. Autonomous vehicle-intersection coordination method in a connected vehicle environment. IEEE Intell. Transp. Syst. Mag. 2017, 9, 37–47. [Google Scholar] [CrossRef]
- National Highway Traffic Safety Administration. National Motor Vehicle Crash Causation Survey: Report to Congress; Technical Report DOT HS; National Highway Traffic Safety Administration: Washington, DC, USA, 2008; Volume 811, p. 059. [Google Scholar]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Koopman, P.; Wagner, M. Autonomous vehicle safety: An interdisciplinary challenge. IEEE Intell. Transp. Syst. Mag. 2017, 9, 90–96. [Google Scholar] [CrossRef]
- Gettman, D.; Pu, L.; Sayed, T.; Shelby, S. Surrogate Safety Assessment Model and Validation: Final Report; Tech. Rep. FHWA-HRT-08-051; US Department of Transportation, Federal Highway Administration: McLean, VA, USA, 2008. [Google Scholar]
- Morando, M.M.; Tian, Q.; Truong, L.T.; Vu, H.L. Studying the safety impact of autonomous vehicles using simulation-based surrogate safety measures. J. Adv. Transp. 2018, 2018, 6135183. [Google Scholar] [CrossRef]
- Higashiyama, K.; Kimura, K.; Babakarkhail, H.; Sato, K. Safety and Efficiency of Intersections With Mix of Connected and Non-Connected Vehicles. IEEE Open J. Intell. Transp. Syst. 2020, 1, 29–34. [Google Scholar] [CrossRef]
- Papadoulis, A.; Quddus, M.; Imprialou, M. Evaluating the safety impact of connected and autonomous vehicles on motorways. Accid. Anal. Prev. 2019, 124, 12–22. [Google Scholar] [CrossRef] [PubMed] [Green Version]
Figure 1.
Connected vehicle communications through V2I and V2V.

Figure 2.
Lane-keeping assistant system maintaining a vehicle position in the lane [31].
Figure 2.
Lane-keeping assistant system maintaining a vehicle position in the lane [31].

Figure 3.
ACC showing selected maximum speed and time gap setting.

Figure 4.
CACC control law to perform platoons.

Figure 5.
Planned and operational vehicle deployments where Infrastructure and In-vehicle units are planned or in use [54]. (number in the figure describes the units of planned and operational connected vehicle deployments).
Figure 5.
Planned and operational vehicle deployments where Infrastructure and In-vehicle units are planned or in use [54]. (number in the figure describes the units of planned and operational connected vehicle deployments).


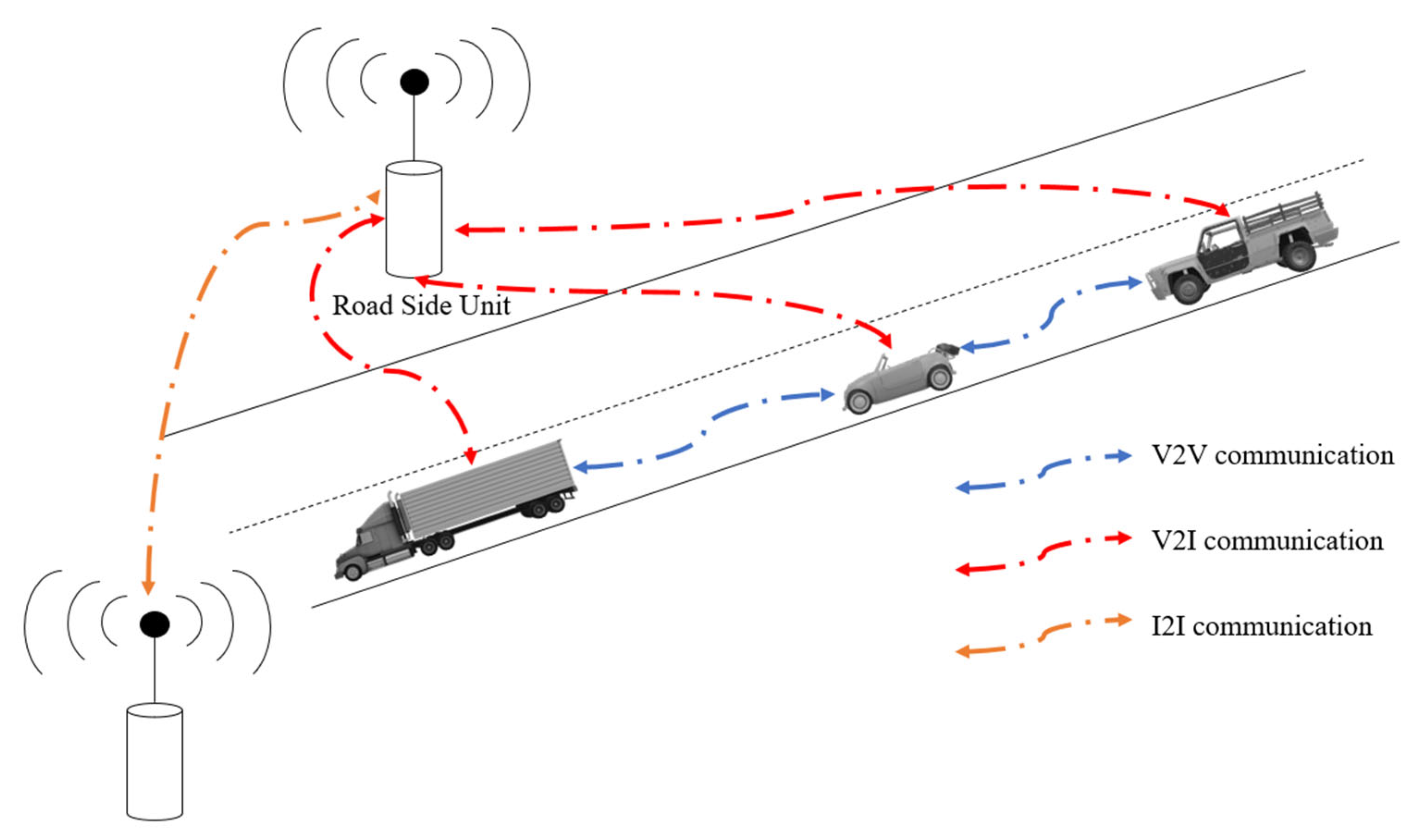{kind=link}
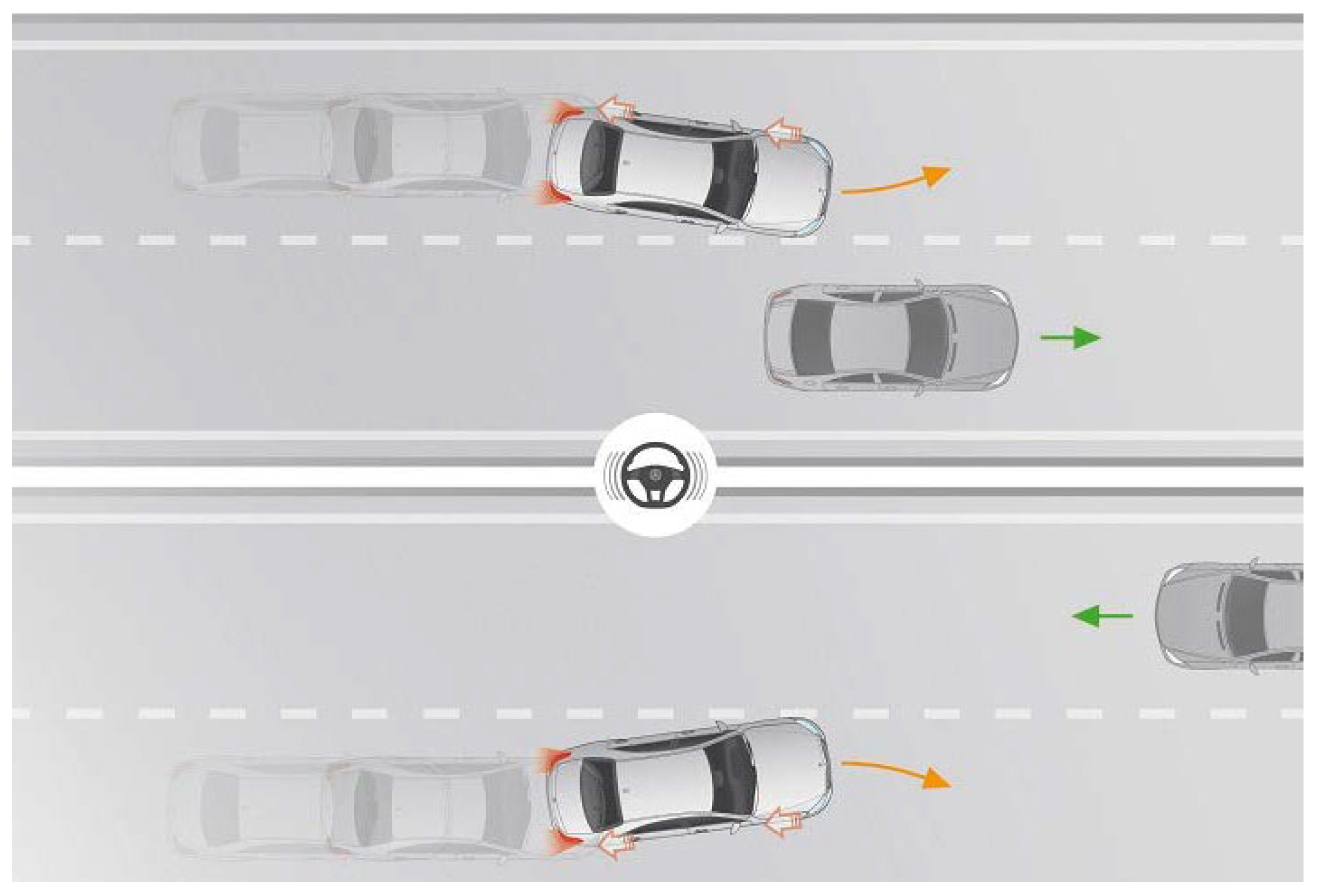{kind=link}
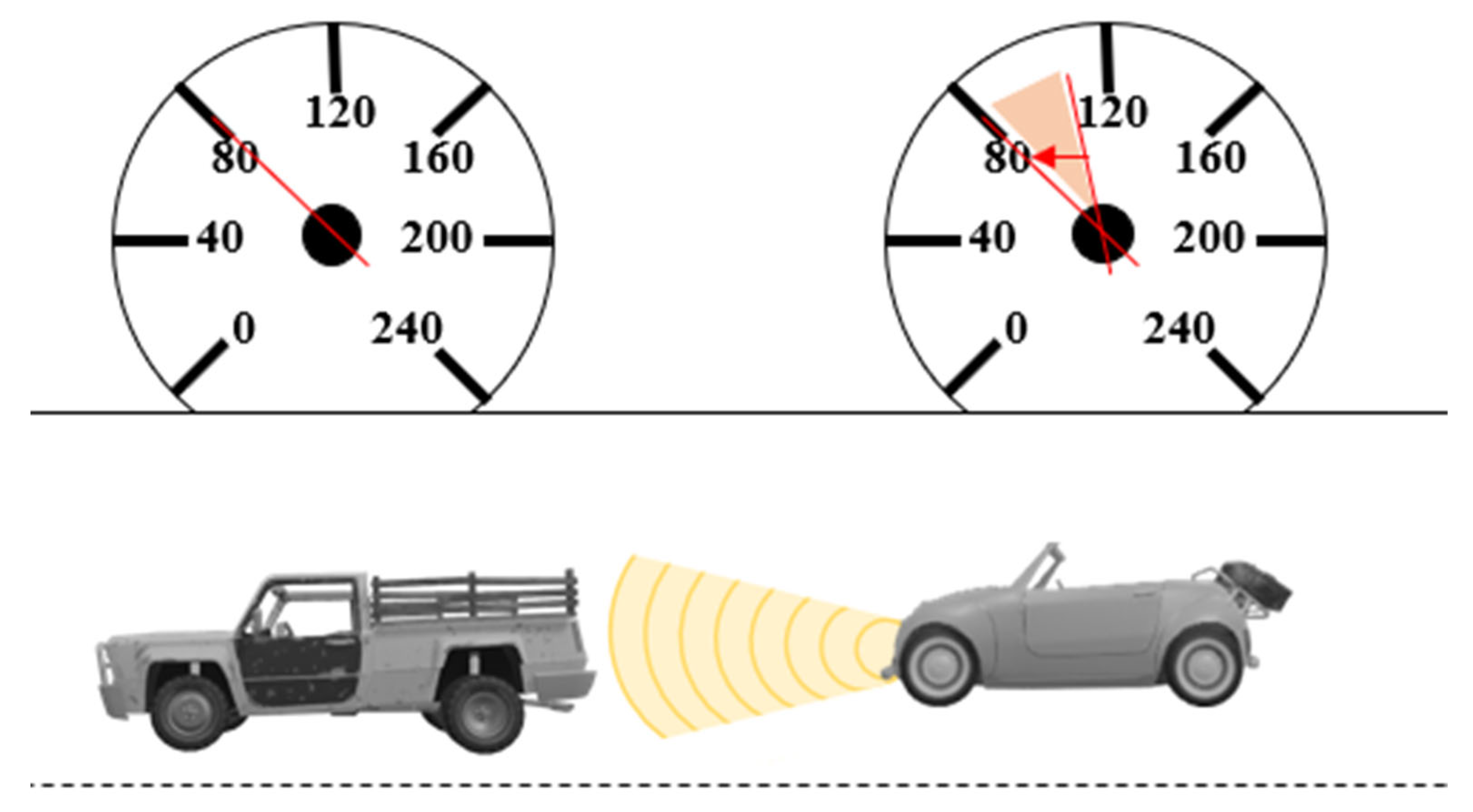{kind=link}
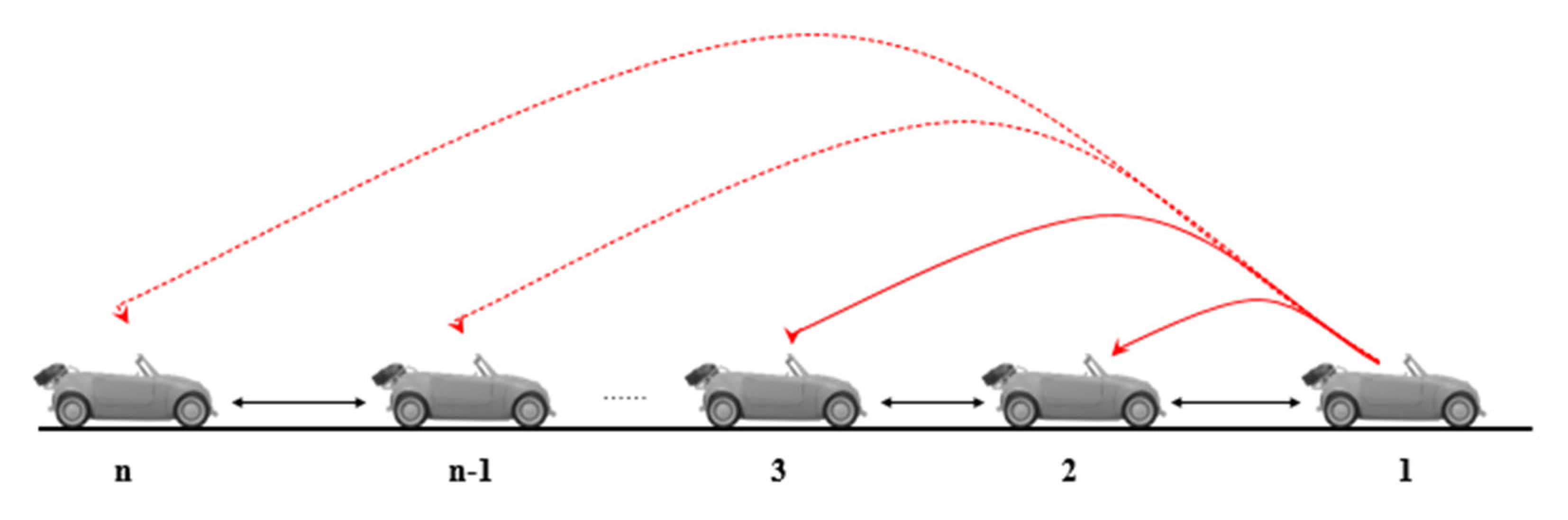{kind=link}
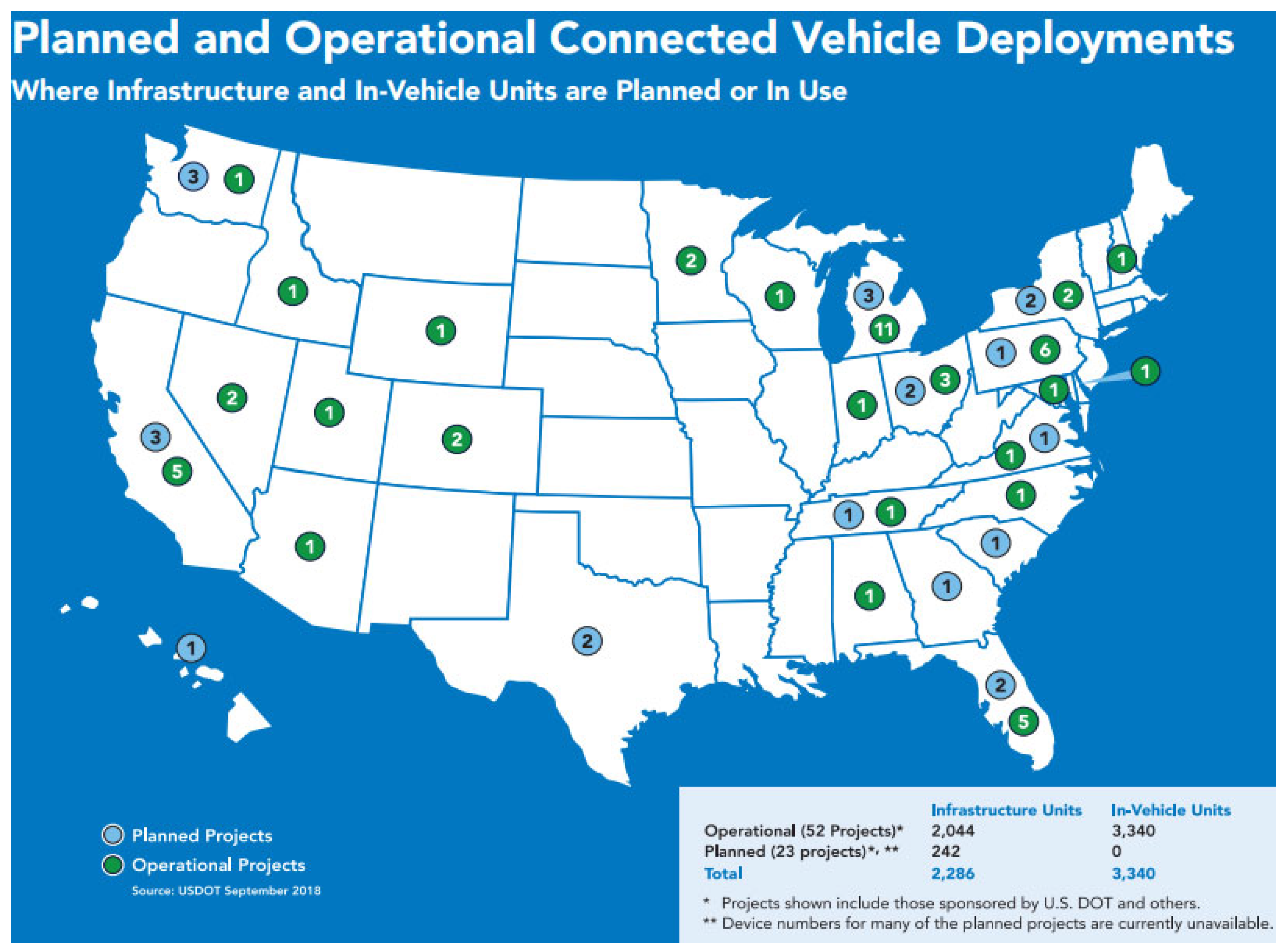{kind=link}
Table 1.
Evolution of automated safety technologies- NHTSA [31].
Table 1.
Evolution of automated safety technologies- NHTSA [31].
| Evolution Era | Automated Technologies |
|---|---|
| 1950–2000 | Safety convenience features |
| Cruise control | |
| Seat belts | |
| Antilock brakes | |
| 2000+–2010 | Advanced safety features |
| Electronic Stability Control | |
| Blind Spot Detection | |
| Forward Collision Warning | |
| Lane Departure Warning | |
| 2010+–2016 | Advanced driver assistance features |
| Rearview Video Systems | |
| Automatic Emergency Braking | |
| Pedestrian Automatic Emergency Braking | |
| Rear Automatic Emergency Braking | |
| Rear Cross-Traffic Alert | |
| Lane Centering Assist | |
| 2016+–2025 | Partially automated safety features |
| Lane-keeping assist | |
| Adaptive cruise control | |
| Traffic jam assist | |
| Self-park | |
| 2025+ | Fully automated safety features |
| Highway autopilot |
Table 2.
Available assistive driving.
| Vehicle Manufacturer | Lateral Movement | Forward Movement | Reverse Movement | Pre-Crash Systems | Parking Task | Attention Monitor | Congestion Assistant | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Lane Departure | Lane-Keeping Assistant | Lane Changing/Blind Spot Detection | Adaptive Cruise Control | Front Cross-Traffic Monitor | Rearview Camera | Rear Cross-Traffic Monitor | Brake Assistant | Forward Collision Warning | Active Protection | ||||
| Audi | Y | Y | Y | Y(radar) | n.a. | Y | n.a. | Y | Y | Y | Y(A) | n.a. | Exp. 2016 (w/o hand) |
| BMW | Y | n.a. | Y | Y(radar) | n.a. | Y | n.a. | Y | Y | Y | Y(A) | Y | Y (w/hand) |
| Ford/Lincoln | Y | Y | Y | Y(radar) | n.a. | Y | Y | Y | Y | n.a. | Y(S) | n.a. | Exp. 2017 |
| Volvo | Y | Y | Y | Y | n.a. | n.a. | Y | Y | n.a. | Y | n.a. | Y | Exp. 2014 |
| Mercedes-Benz | Y | Y | Y | Y(radar) | Y | Y | Y | Y | Y | Y | Y(S) | Y | Y (w/hand) |
| Cadillac | Y | n.a. | Y | Y | n.a. | Y | Y | Y | Y | n.a. | Y(S) | n.a. | n.a. |
| Infiniti/Nissan | Y | Y | Y | Y(radar) | n.a. | Y | Y | Y | n.a. | n.a. | n.a. | n.a. | n.a. |
| Acura/Honda | Y | Y | n.a. | Y | n.a. | Y | n.a. | n.a. | Y | n.a. | n.a. | n.a. | n.a. |
| Lexus/Toyota | Y | Y | Y | Y(radar) | n.a. | n.a. | Y | Y | n.a. | Y | Y | Y | n.a. |
| Kia | Y | n.a. | Y | Y(radar) | n.a. | Y | Y | Y | n.a. | Y | Y | n.a. | n.a. |
| Hyundai | Y | Y | Y | Y(radar) | n.a. | n.a. | Y | Y | n.a. | n.a. | n.a. | n.a. | n.a. |
Note: Information is obtained from the sources up to 2015, where ‘exp’ means expected, n.a. means not applicable, A means “auto”, and “S” means “semi”.
| SAE Level | Name and Definition | Steering, Acceleration/Deceleration | Monitoring Driving Environment | Fallback Performance of a Dynamic Driving Task | System Capability (Driving Modes) |
|---|---|---|---|---|---|
Level 0  | No Automation—The full-time performance by the human driver of all aspects of the dynamic driving task, even when enhanced by warning or intervention systems. | Human driver | Human driver | Human driver | - |
Level 1  | Driver Assistance—The driving mode-specific execution by a driver assistance system of either steering or acceleration/deceleration using information about the driving environment and with the expectation that the human driver performs all remaining aspects of the dynamic driving task. | Human driver and system | Human driver | Human driver | Some driving modes |
Level 2  | Partial Automation—The driving mode-specific execution by one or more driver assistance systems of both steering or acceleration/deceleration using information about the driving environment and with the expectation that the human driver performs all remaining aspects of the dynamic driving task. | Human driver and system | Human driver | Human driver | Some driving modes |
Level 3  | Conditional Automation—The driving mode-specific performance by an automated driving system of all aspects of the dynamic driving task with the expectation that the human driver will respond appropriately to a request to intervene. | System | System | Human driver | Some driving modes |
Level 4  | High Automation—The driving mode-specific performance by an automated driving system of all aspects of the dynamic driving task, even if a human driver does not respond appropriately to a request to intervene. | System | System | System | Some driving modes |
Level 5  | Full Automation—The full-time performance by an automated driving system of all aspects of the dynamic driving task under all roadway and environmental conditions that can be managed by a human driver. | System | System | System | All driving codes |
Table 4.
VISSIM simulation results for CAVs performance at the strategic road network [2].
Table 4.
VISSIM simulation results for CAVs performance at the strategic road network [2].
| Scenario | Average Delay | Average Journey Time | ||
|---|---|---|---|---|
| (s) | (%) | (s) | (%) | |
| Base | 35.84 | - | 539.79 | - |
| 25% CAV | 36.17 | +0.9% | 538.49 | −0.2% |
| 50% CAV | 33.39 | −6.8% | 533.62 | −1.1% |
| 75% CAV | 29.77 | −16.9% | 527.72 | −2.2% |
| 100% CAV | 23.72 | −33.8% | 517.77 | −4.1% |
| Upper bound * | 21.38 | −40.3% | 479.29 | −11.2% |
Note: * upper bound is a fleet consisting of fully automated vehicles.
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Ahmed, H.U.; Huang, Y.; Lu, P.; Bridgelall, R. Technology Developments and Impacts of Connected and Autonomous Vehicles: An Overview. Smart Cities 2022, 5, 382-404. https://0-doi-org.brum.beds.ac.uk/10.3390/smartcities5010022
AMA Style
Ahmed HU, Huang Y, Lu P, Bridgelall R. Technology Developments and Impacts of Connected and Autonomous Vehicles: An Overview. Smart Cities. 2022; 5(1):382-404. https://0-doi-org.brum.beds.ac.uk/10.3390/smartcities5010022
Chicago/Turabian StyleAhmed, Hafiz Usman, Ying Huang, Pan Lu, and Raj Bridgelall. 2022. "Technology Developments and Impacts of Connected and Autonomous Vehicles: An Overview" Smart Cities 5, no. 1: 382-404. https://0-doi-org.brum.beds.ac.uk/10.3390/smartcities5010022