1. Introduction
Sustainable agriculture aims at placing the agricultural inputs in such way to reduce the environmental degradation along with optimizing the operational efficiency and reduce the cost of operation. According to the US Farm Bill [
1], “sustainable agriculture is an integrated system of plant and animal production practices having a site-specific application that will, over the long term: (a) satisfy human food and fiber needs; (b) enhance environmental quality; (c) make efficient use of non-renewable resources and on-farm resources and integrate appropriate natural biological cycles and controls; (d) sustain the economic viability of farm operations; and (e) enhance the quality of life for farmers and society as a whole”. In traditional farming, a blanket of treatment is applied throughout the field instead of treating only the problematic locations [
2] without consideration for human health and contamination of the environment.
The increasing trend of applying agrochemicals in field crops is an integral part of the advance of agriculture. According to one study, in the United States, 3 million kg of agrochemicals costing 40 million US dollars are used annually [
3,
4]. Agrochemicals can save 45% of the world food supply by protecting crops from different insects and pests [
5]. On other hand, this heavy use of agrochemicals has increased the risk of air, soil, and water pollution. During the application of these chemicals in the field, small spray particles move away from the intended areas (spray drift) and cause contamination [
6]. Almost 30% of agricultural chemicals are wasted due to off-target spray drift [
7,
8]. This off-target spray drift could create health issues for animals and humans, damage nearby sensitive crops, and contaminate water sources and soils. However, Nuyttens [
9] noted that reduction of the dosage of these chemicals may unfortunately reduce their effectiveness and could result in loss of money and chemicals. The increasing demand for food and fiber has forced farmers to apply agrochemicals. Therefore, spray drift became an important issue not only for public health but also for the scientific community. Spraying time is another important factor during the farm operation. In the modern agriculture world, timely execution of farming operations is required to ensure the efficiency of the activities by reducing activity durations, energy (fuel) use, labour hired, and overall cost (which is one pillar of sustainable agriculture) [
10].
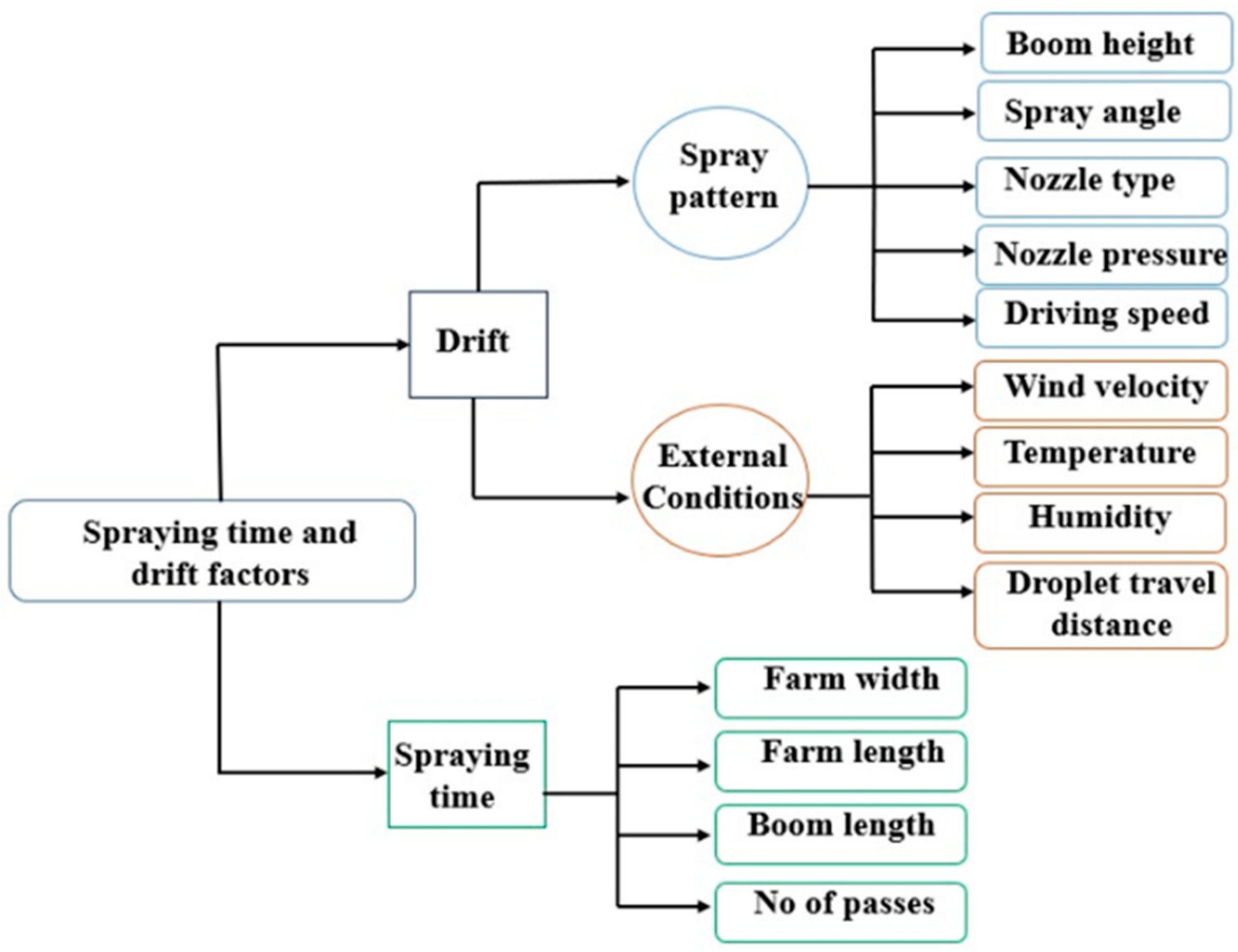
There are several factors which have direct influence on spray drift. These factors can be categorized into three major groups: (1) Sprayer related factors (boom height, driving speed, nozzle angle, nozzle pressure); (2) Weather conditions (temperature, humidity, wind velocity); (3) Crop conditions (crop type, crop height, crop stage) [
9].
Different researchers studied the impact of these factors on spray drift individually. For example, [
11,
12,
13,
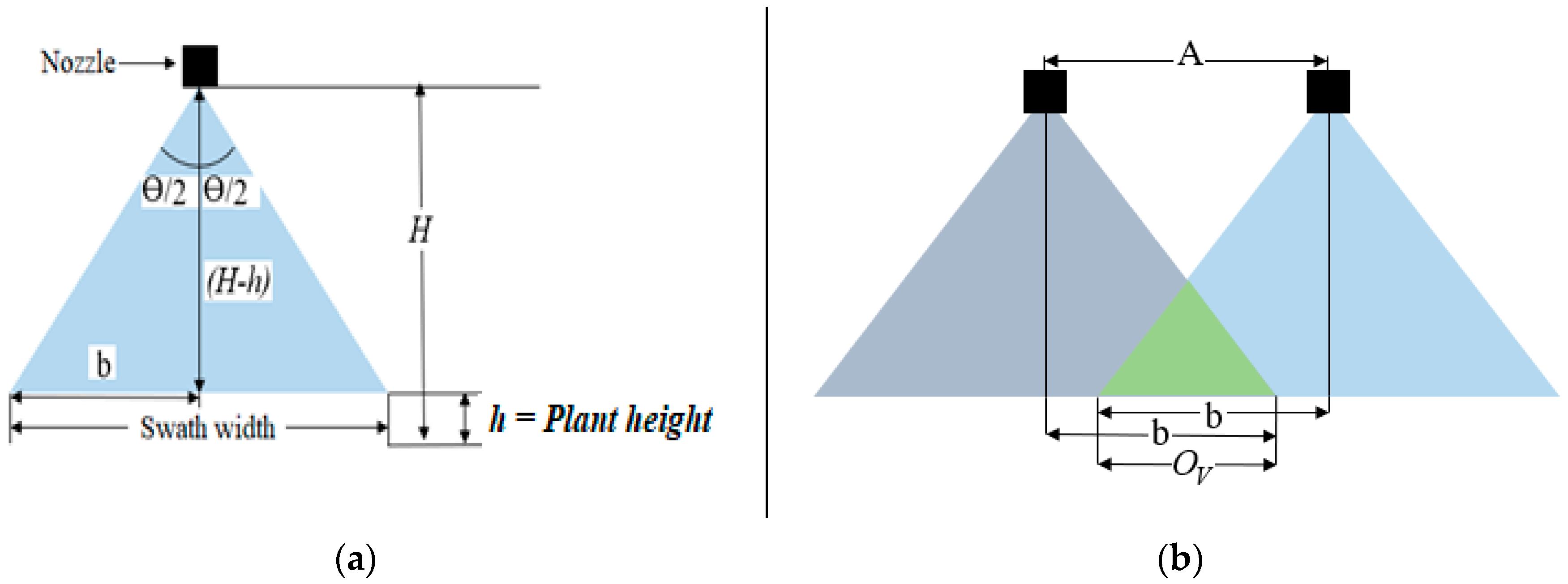
14] studied the impact of boom height on spray drift. These studies concluded that drift losses decreased by lowering the boom height. Drift losses can be decreased by 80% and 56% when the boom height is decreased from 70 cm to 30 cm and 50 cm to 30 cm respectively. Boom height has a significant impact on swath width (area covered by specific height and angle). Increasing the boom height increases the swath width and more area can be covered (which is good when crop canopy is fully developed) but on other hand, if the height is too high, then spray particles will be at more risk of moving with the wind and more drift losses will be expected [
14].
The next important factor is tractor driving speed, which is directly linked with time of operation and has significant impact on spray drift [
3,
9,
15,
16,
17] conducted experiments to see the impact of driving speed on spray drift and concluded that spray drift increased by 90% when the tractor speed increased from 7.0 km/h to 10 km/h. Nozzle type and its pressure are also important factors regarding the spray drift [
3,
18].
Al-Heidary [
3] studied the influence of wind velocity on spray drift and concluded that as the wind velocity increases the drift losses increased. It is also recommended not to spray the field if wind velocity is 2.77 m/s or above [
19]. Temperature and humidity had their own significance in spray drift study. High temperature and low humidity will increase the risk of spray drift due to high evaporation. High temperature and high the humidity will cause the suspension of spray particles in the air which will also contribute towards air contamination [
3]. Crop type, crop height, and crop stage are also important consideration in spray drift study. Most of the studies investigate the impact of these factors on an individual basis.
Many researchers worked on the importance of drift by considering the sprayer related, weather related and crop related factors [
3,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20] but very few studies dealt with spraying time. Spraying time is another important factor, which is directly linked with drift losses and cost of spraying operation. Tobi [
19] showed that farmers have no means to select efficient spraying speed. Their main goal is usually to finish as soon as possible given the labour and fuel costs. Thus, farmers usually opt for the highest speed possible without consideration for the fact that the selected speed could increase the hazardous effect of drift losses. Increased tractor speed will lead to the less spraying time but ultimately increases the drift. Drift losses increased by 51% when the tractor speed increased from 4.0 km/h to 8.0 km/h and 144% when tractor is operated at 16 km/h speed [
19]. Therefore, there is a need for a trade-off between spraying time and drift.
4. Conclusions
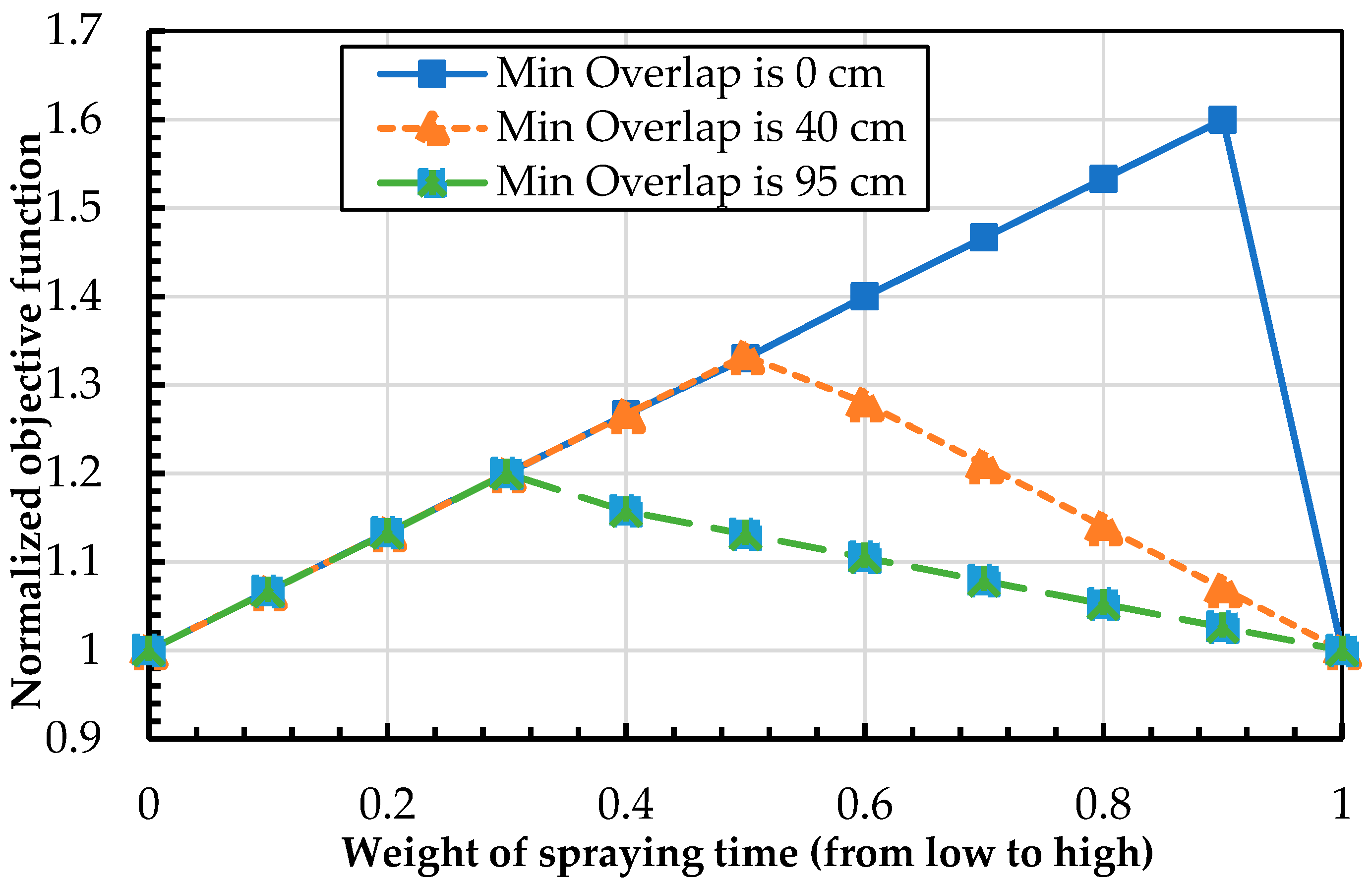
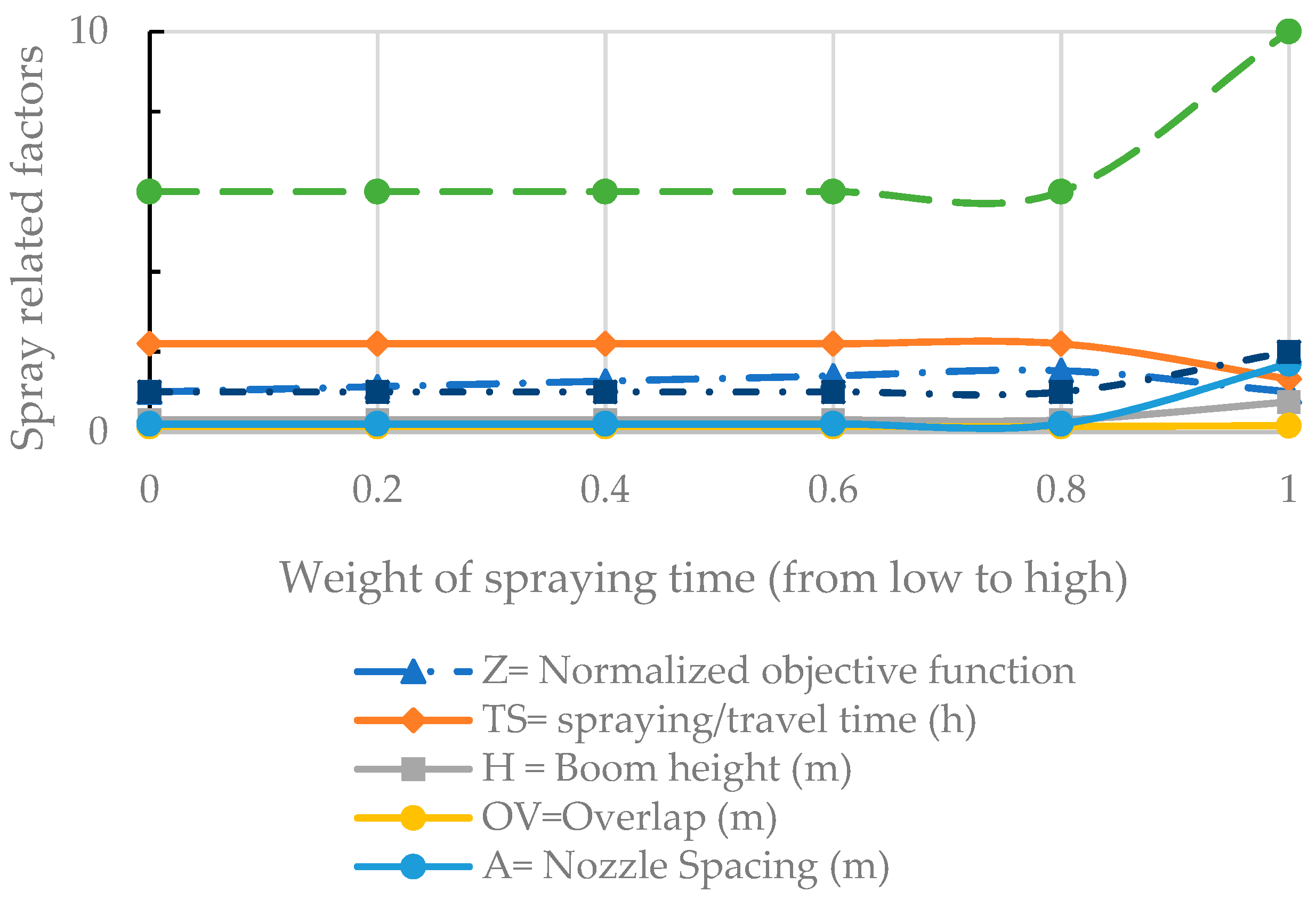
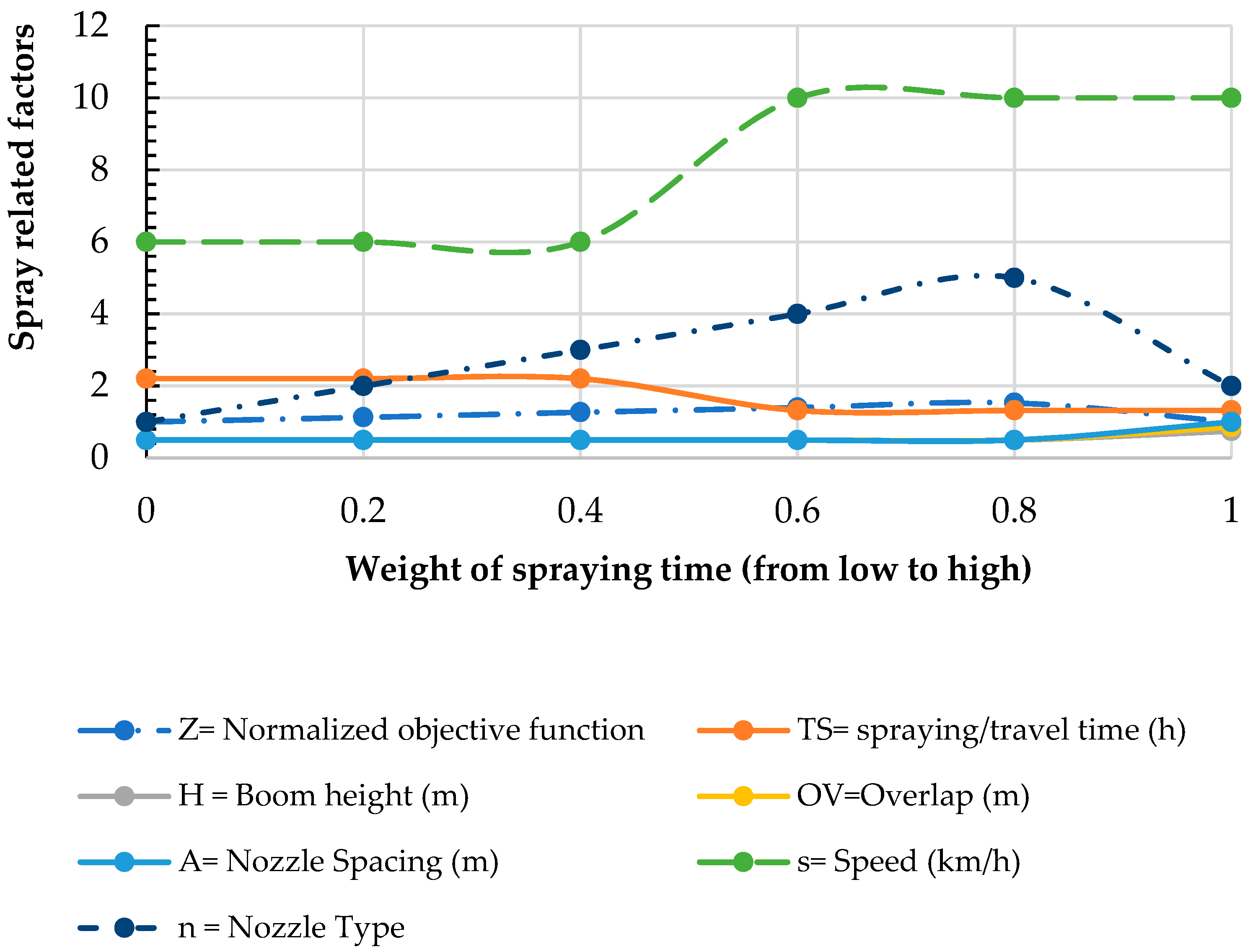
In this paper, a mathematical model was developed to select settings for spraying operations with the dual goal of jointly minimizing spraying time and drift proportions. The obtained bi-objective mixed integer nonlinear programming model was solved for a case study example published in the crop protection literature. Optimal solutions were obtained using the weighted sums method and the epsilon-constraint approach. The results showed that valid and reasonable solution can be obtained by selecting the appropriate combination of boom height, nozzle spacing, nozzle type, operating pressure, and tractor travel speed. The mathematical model developed in this study could be extended to include more factors such as evaporation, spray run-offs, and integrated into a mobile phone app to assist farmers in selecting the settings for their spraying operations.
The current mathematical model does not consider any specific crop and other drift factors such as evaporation and droplet sizes. Future research initiatives should target the integration of these factors. It would also be useful to conduct extensive field experiments with the goal of obtaining more granular data to feed into the bi-objective model to test its behavior on larger datasets. Furthermore, recent developments in the field of numerical simulation of drift losses can be leveraged to build joint simulation-optimization models to help farmers and decision makers in the selection of their spraying parameters.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}