Mapping Wheat Dry Matter and Nitrogen Content Dynamics and Estimation of Wheat Yield Using UAV Multispectral Imagery Machine Learning and a Variety-Based Approach: Case Study of Morocco

 ,
,
Abstract
:1. Introduction
- Monitor wheat crop and estimate its yield using UAV technology multispectral imagery.
- Evaluate the use of the Red-Edge band in agricultural remote sensing applications.
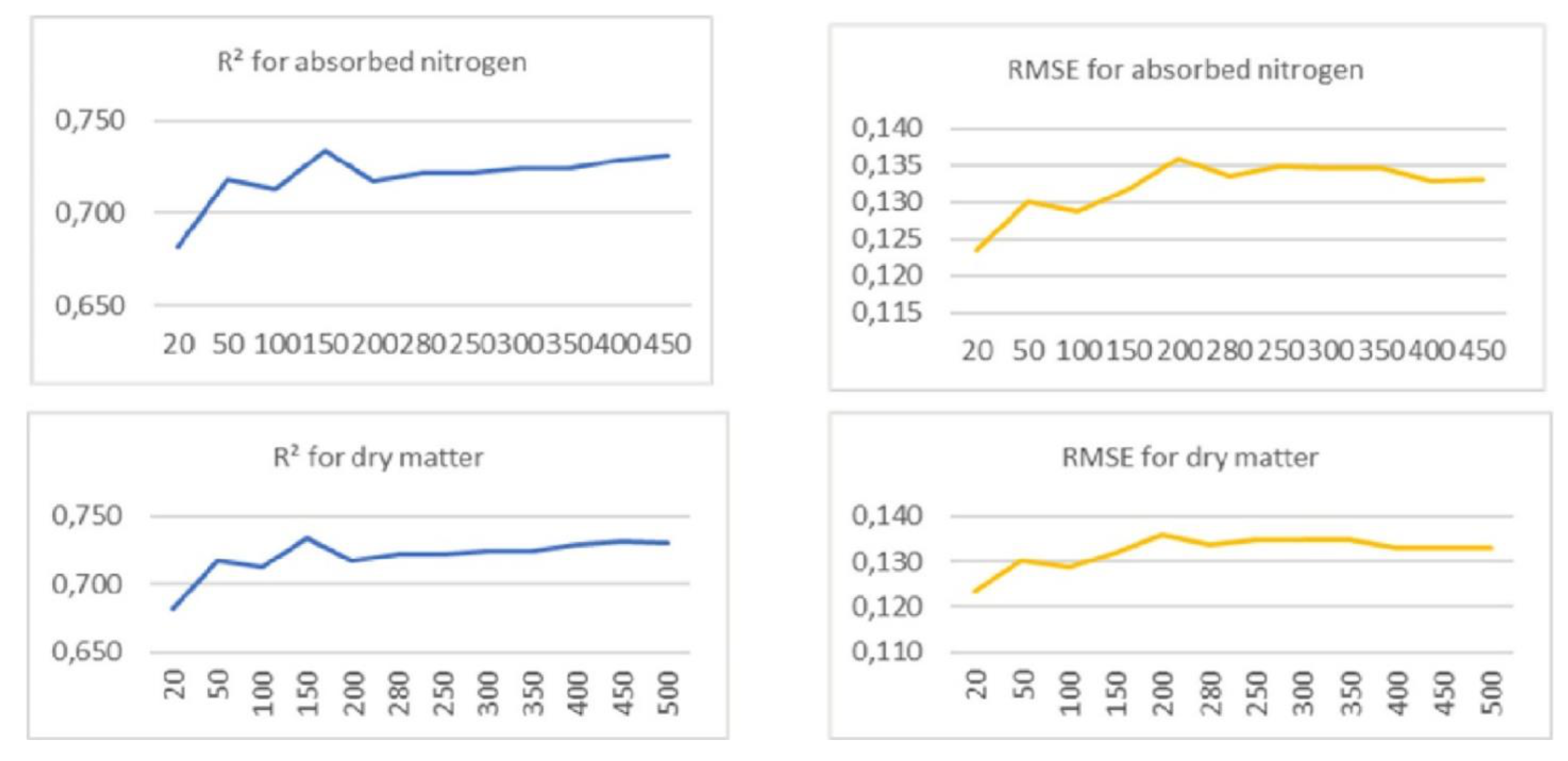
- Use of regression functions and Random Forest as a machine learning technique for prediction purposes in agriculture.
- Elucidate the ability of different vegetation indices to estimate the biophysical parameters of wheat crop, namely dry matter and nitrogen uptake considering wheat’s phenotypical diversity and phenological stages.
2. Materials and Methods
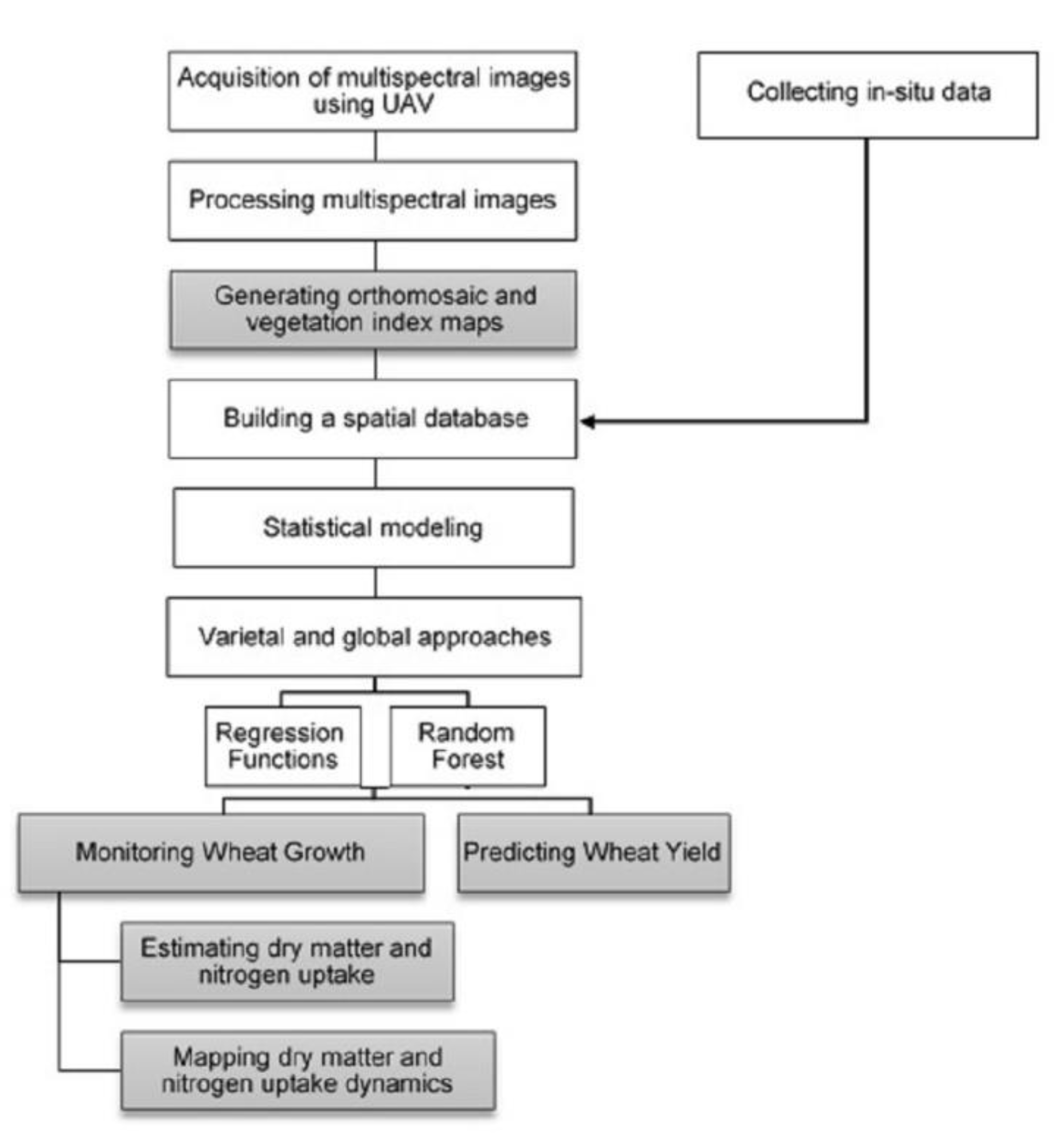
2.1. General Methodology
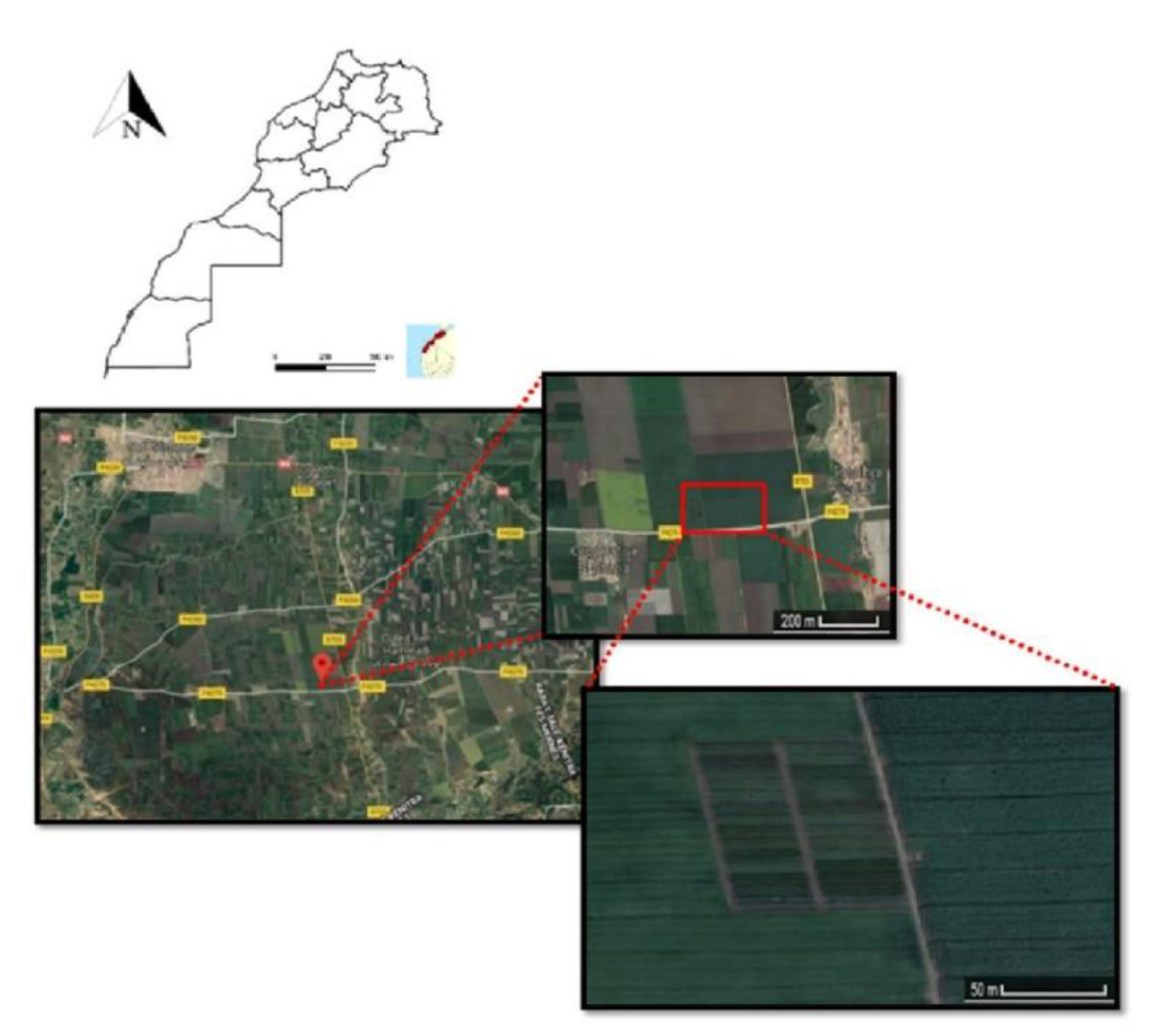
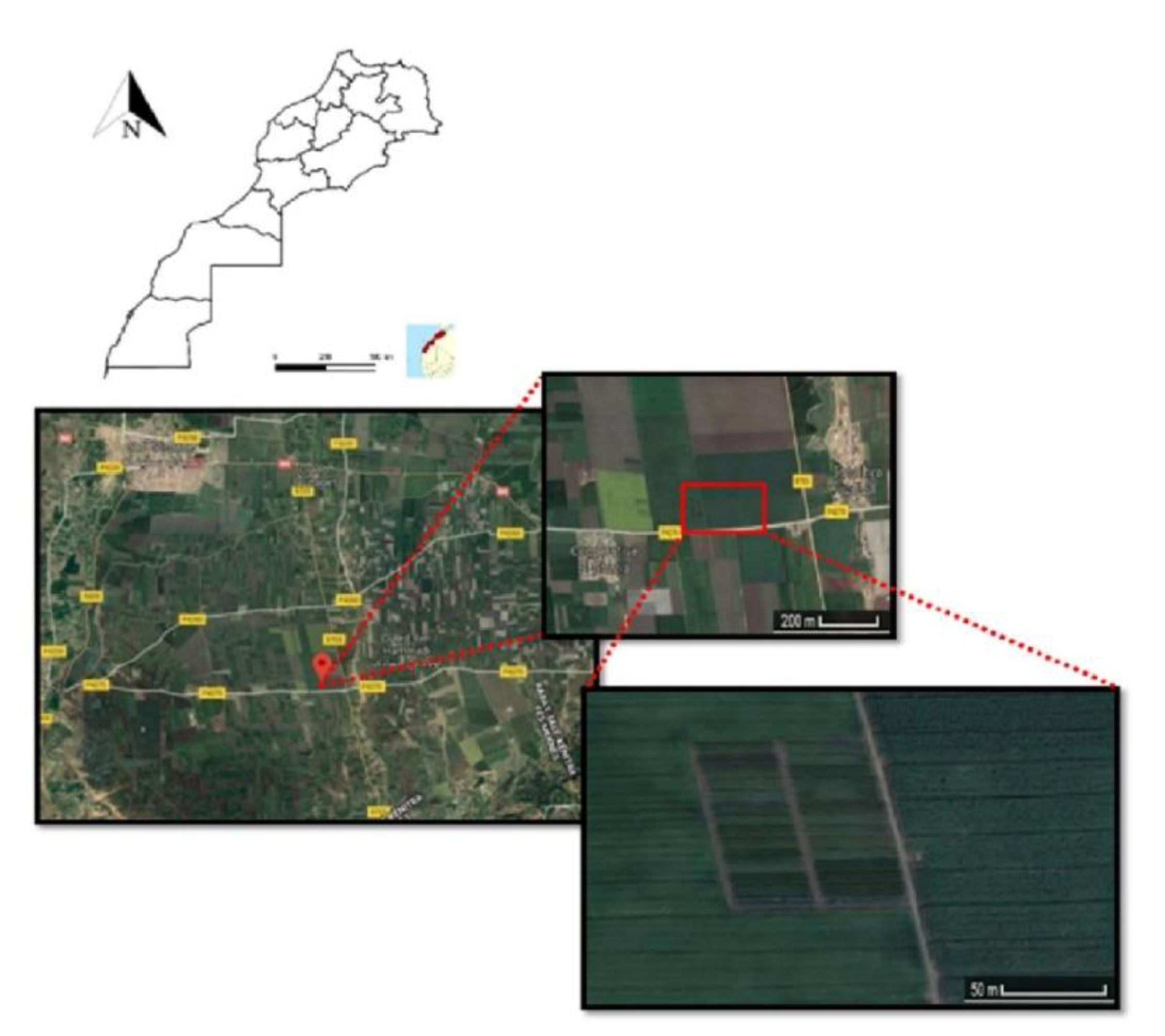
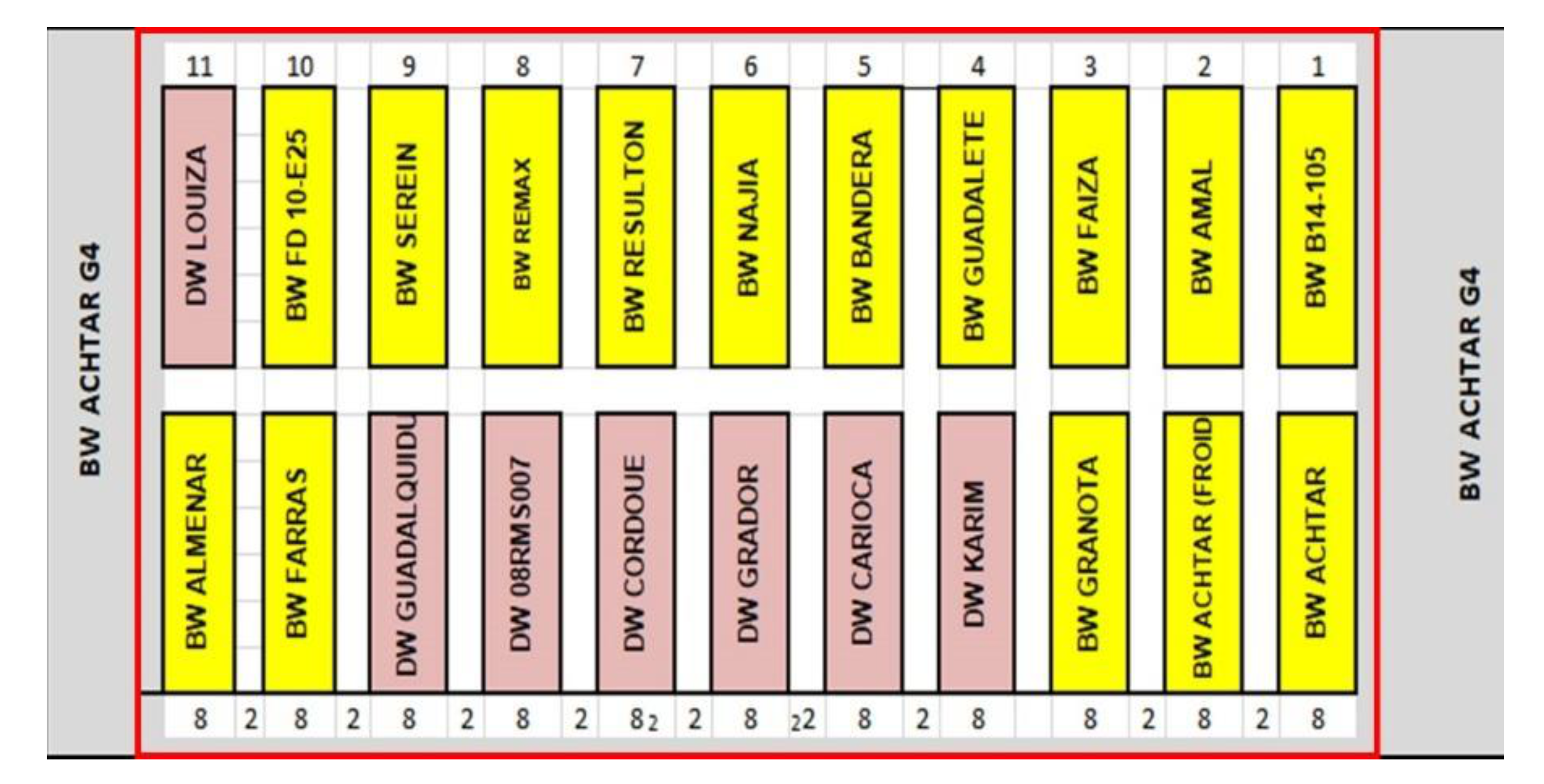
2.2. Study Area
2.3. UAV and In-Situ Data Acquisition
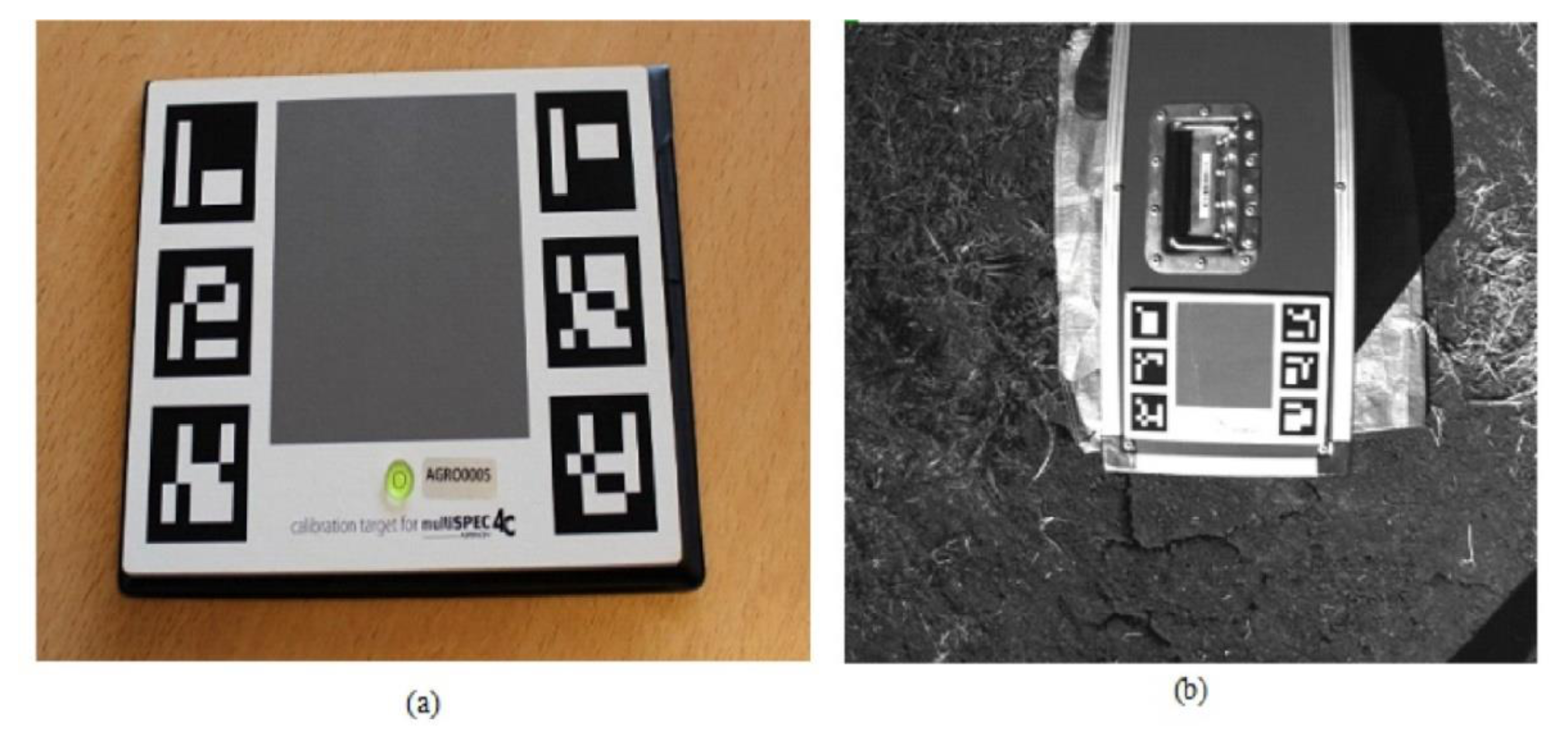
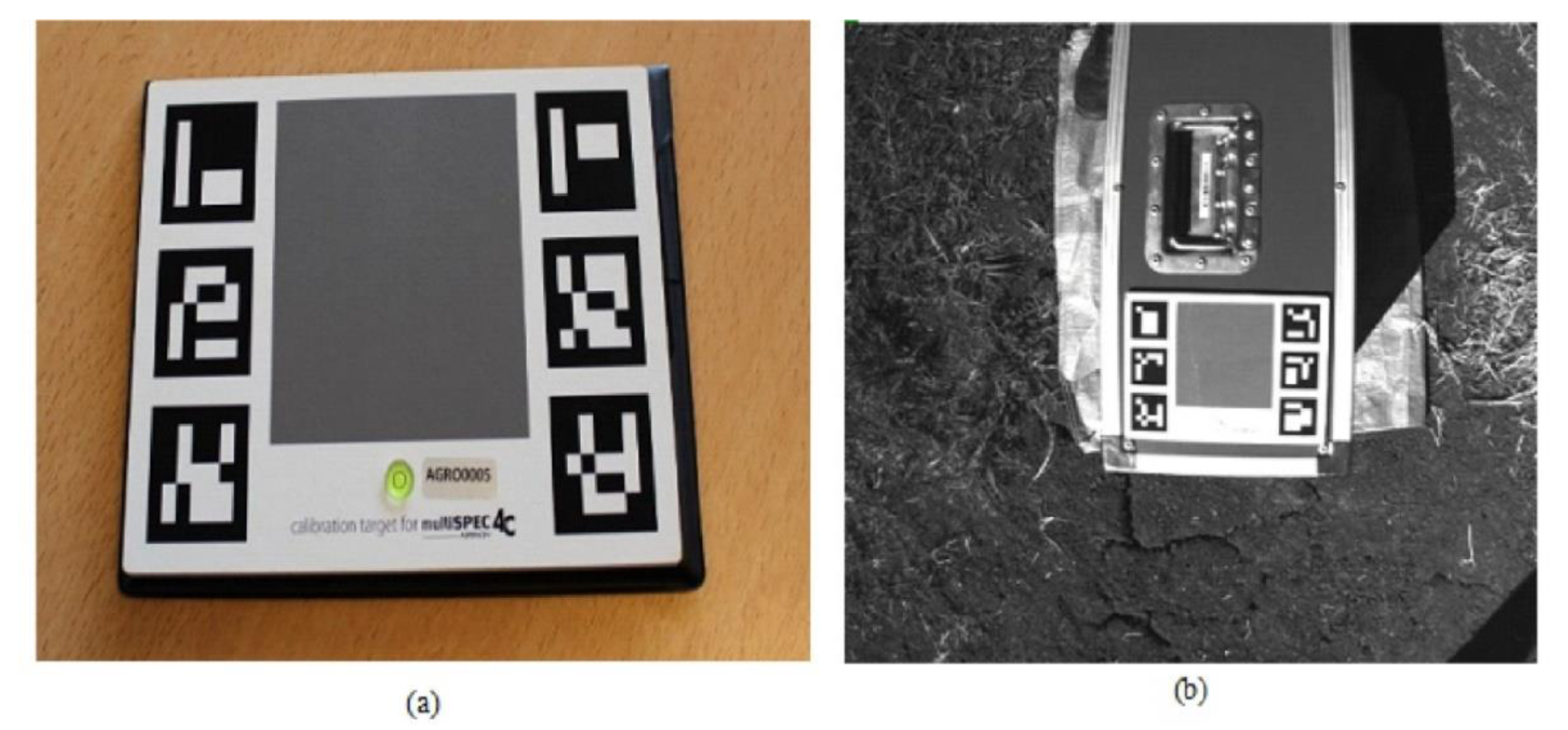
2.3.1. Acquisition of UAV’s Multispectral Imagery
2.3.2. Collecting In-Situ Data
- Field phase:
- Laboratory phase:
2.4. Multispectral UAV Images Processing
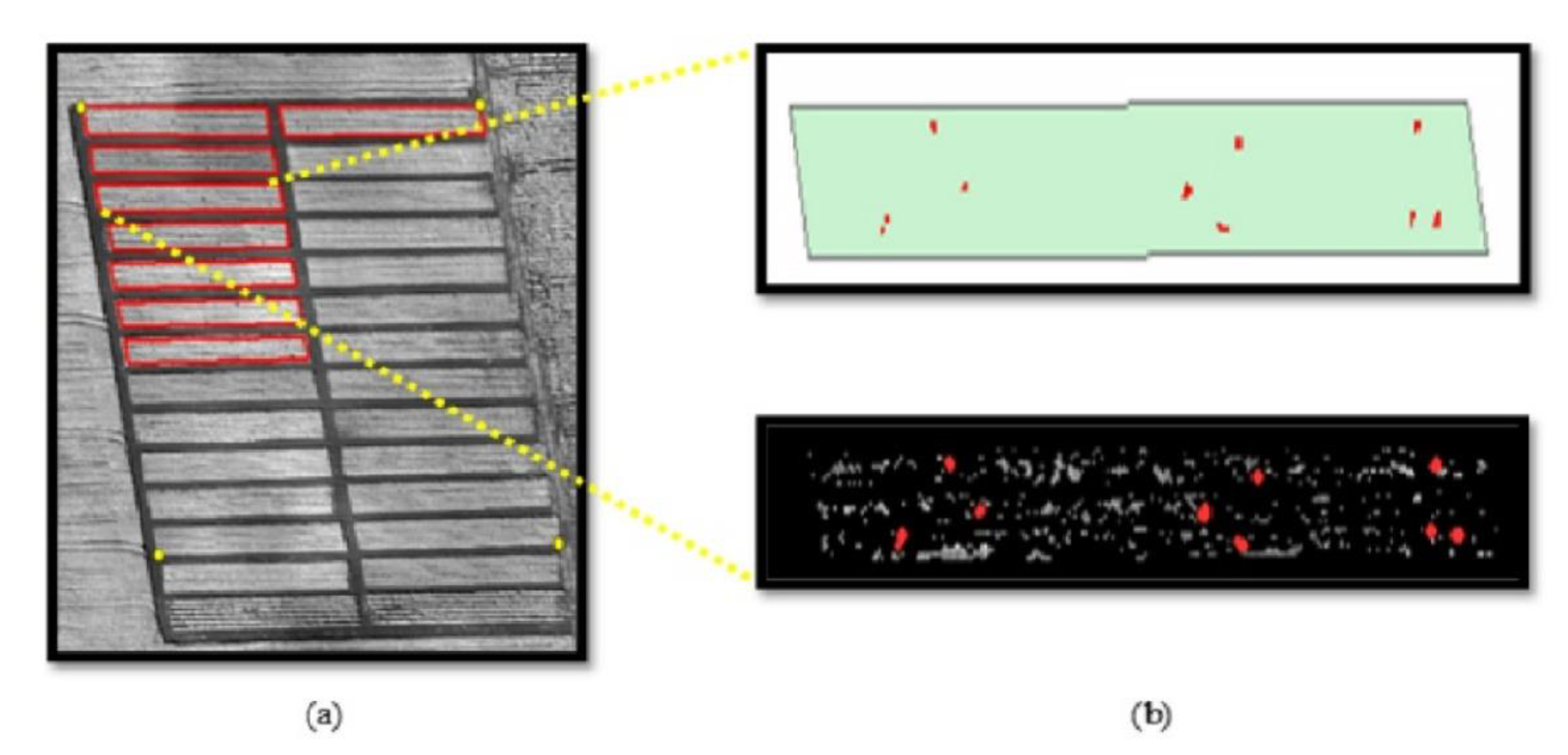
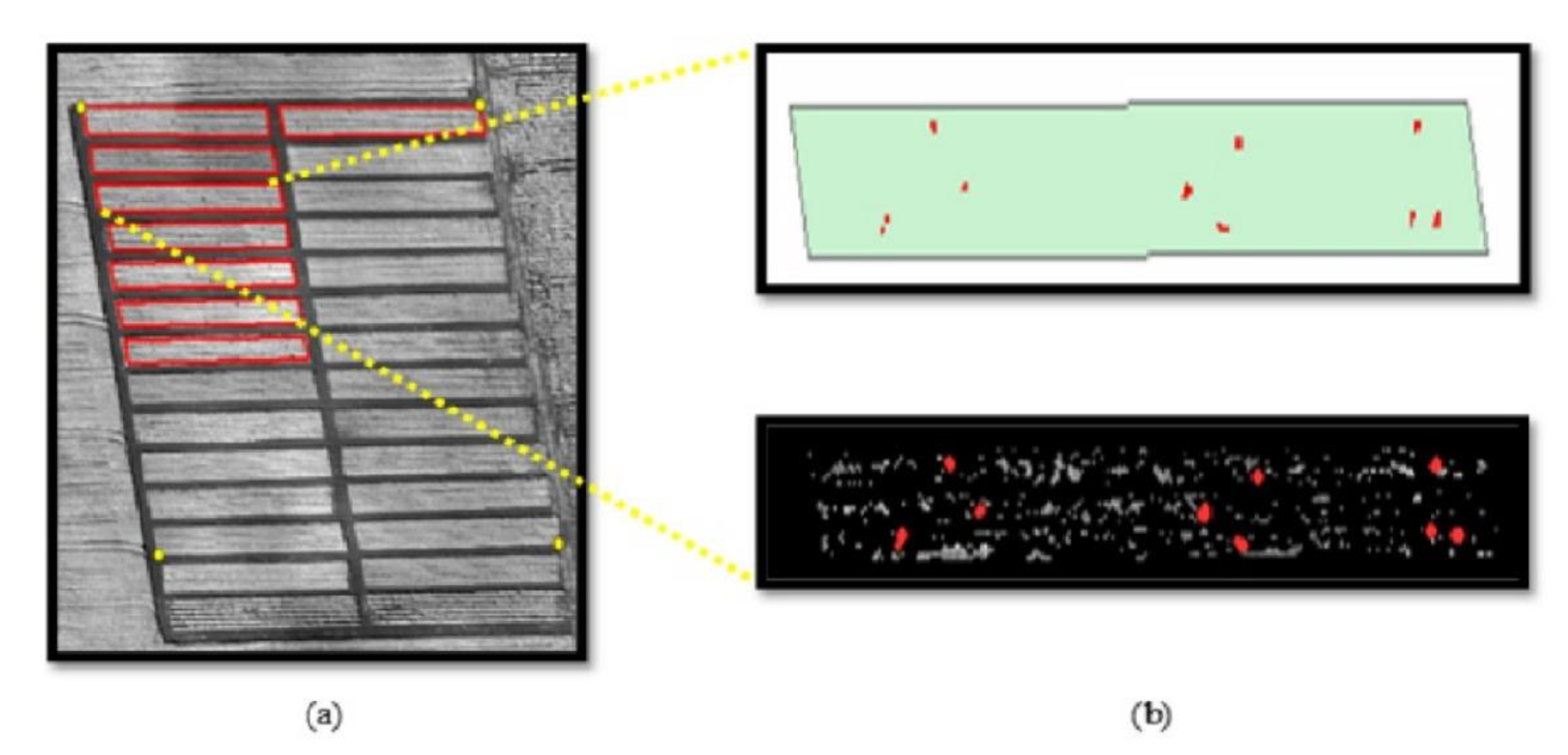
2.5. Automatic Extraction of Plots
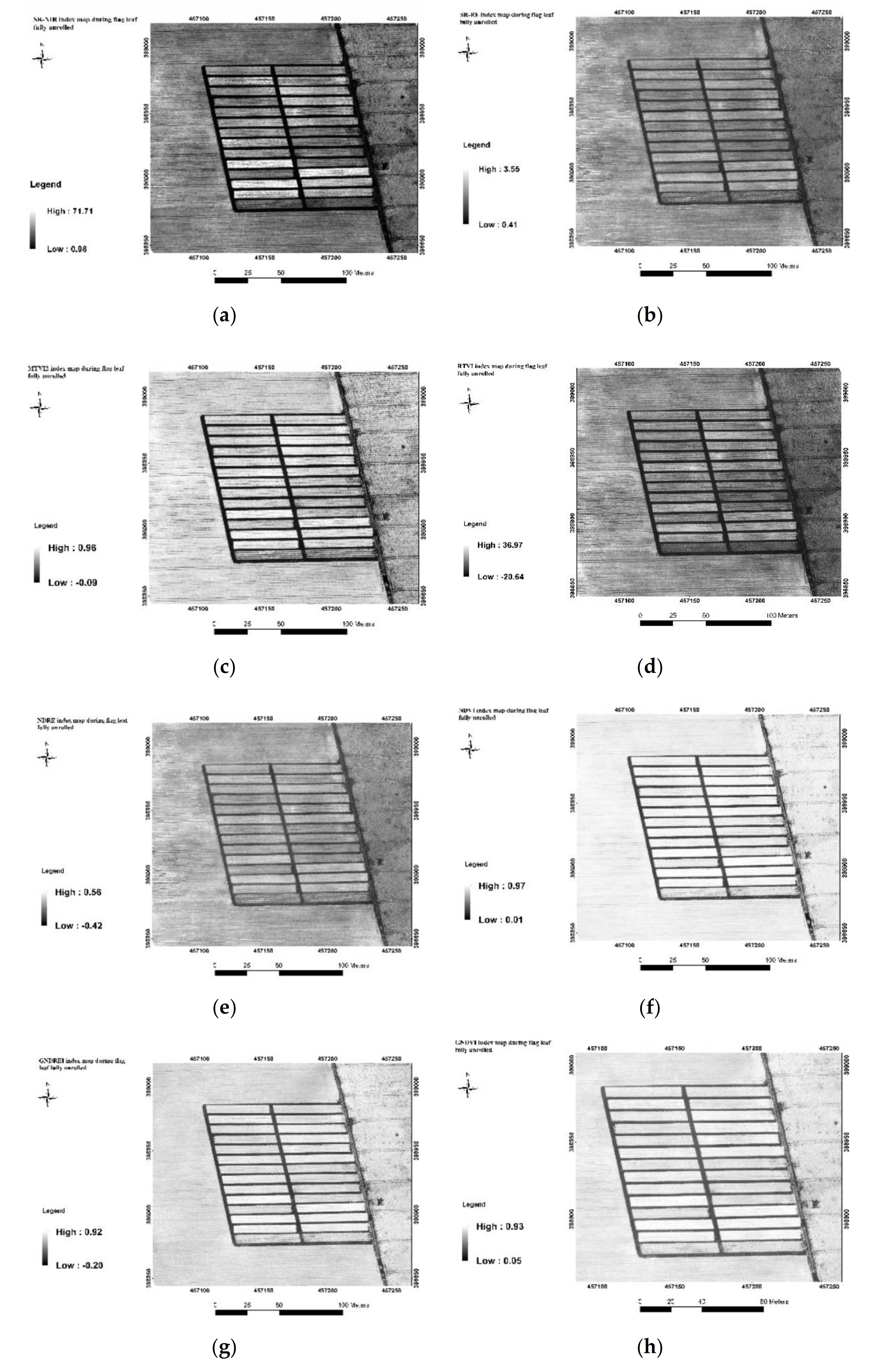
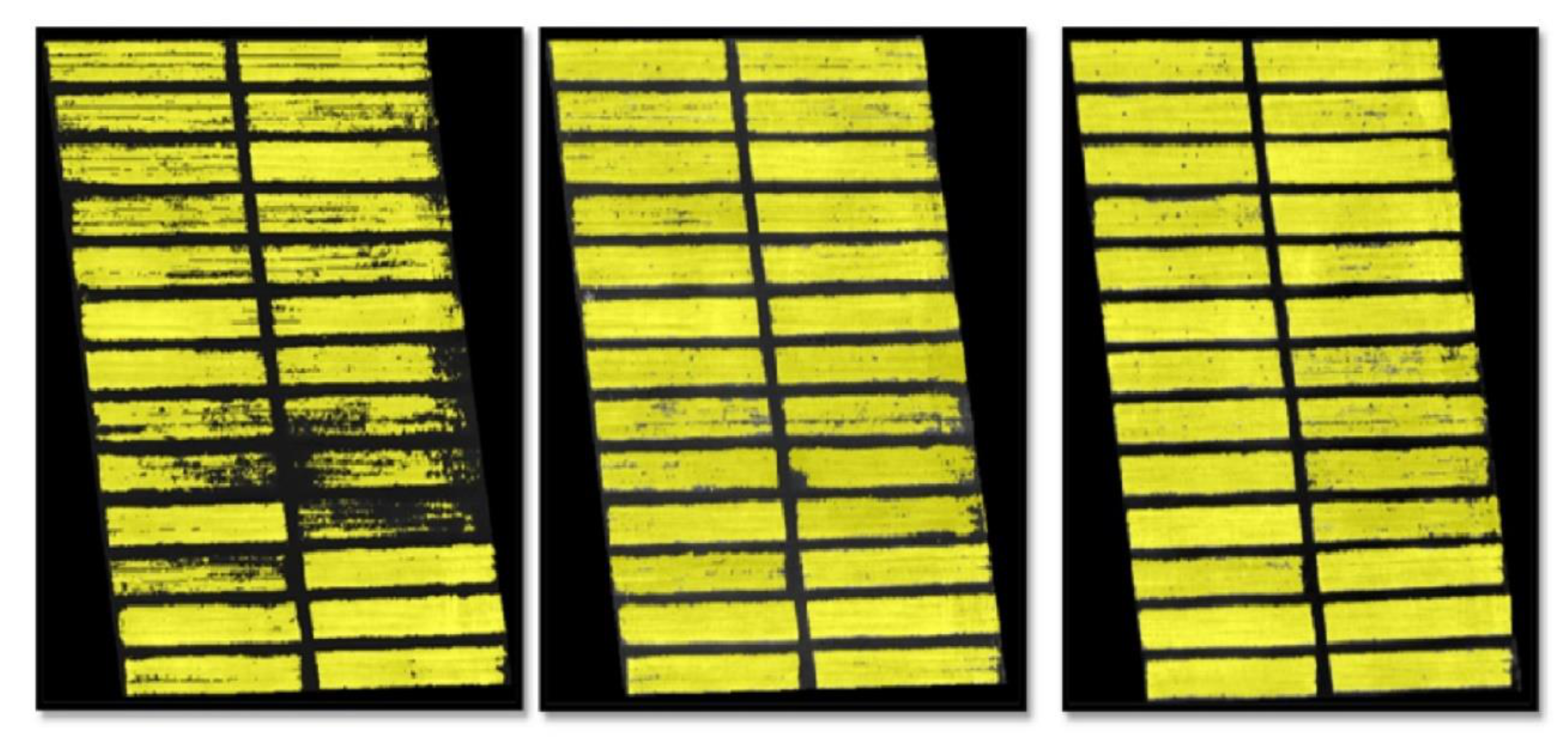
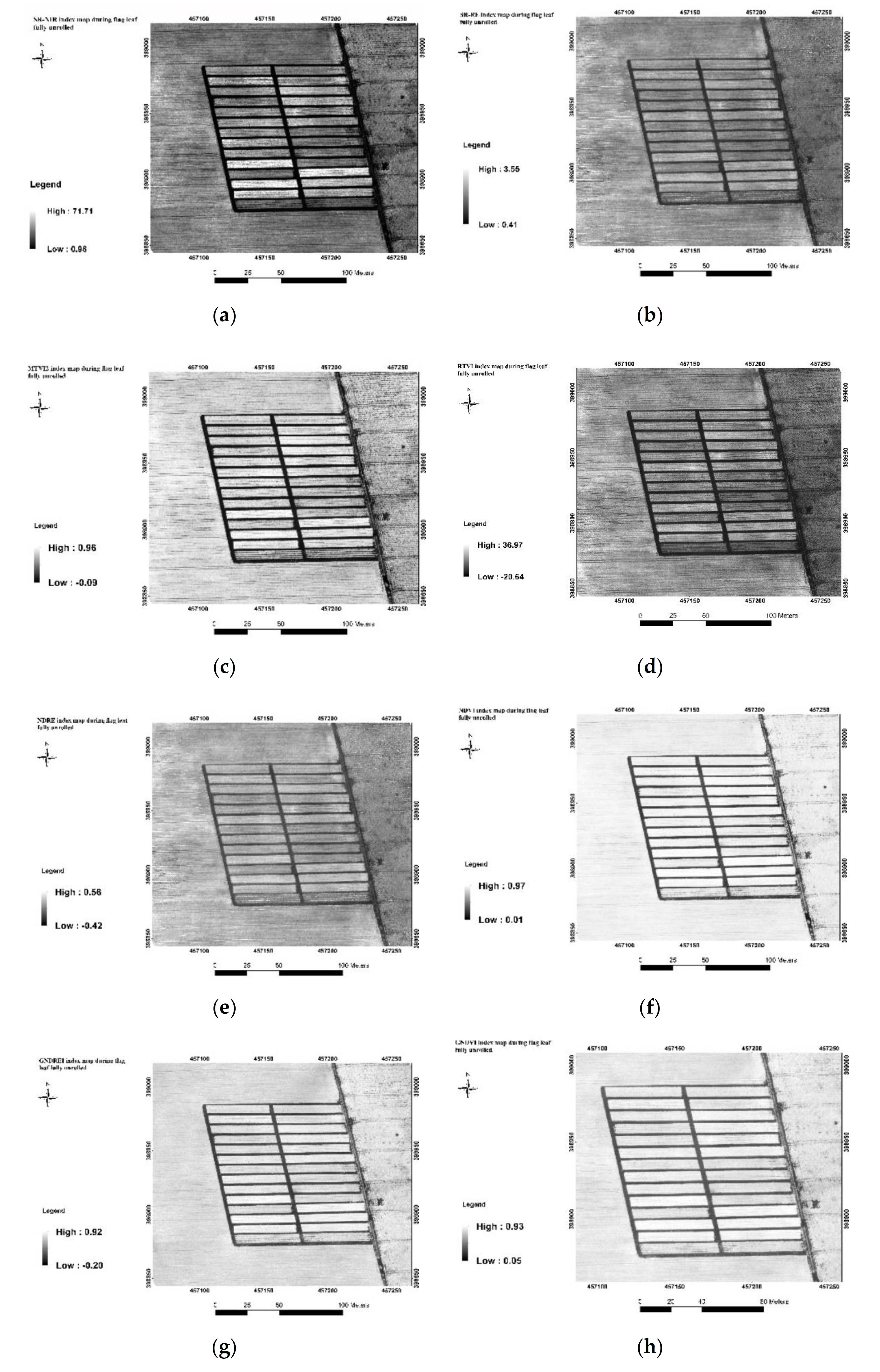
2.6. Generation of Vegetation Index Maps
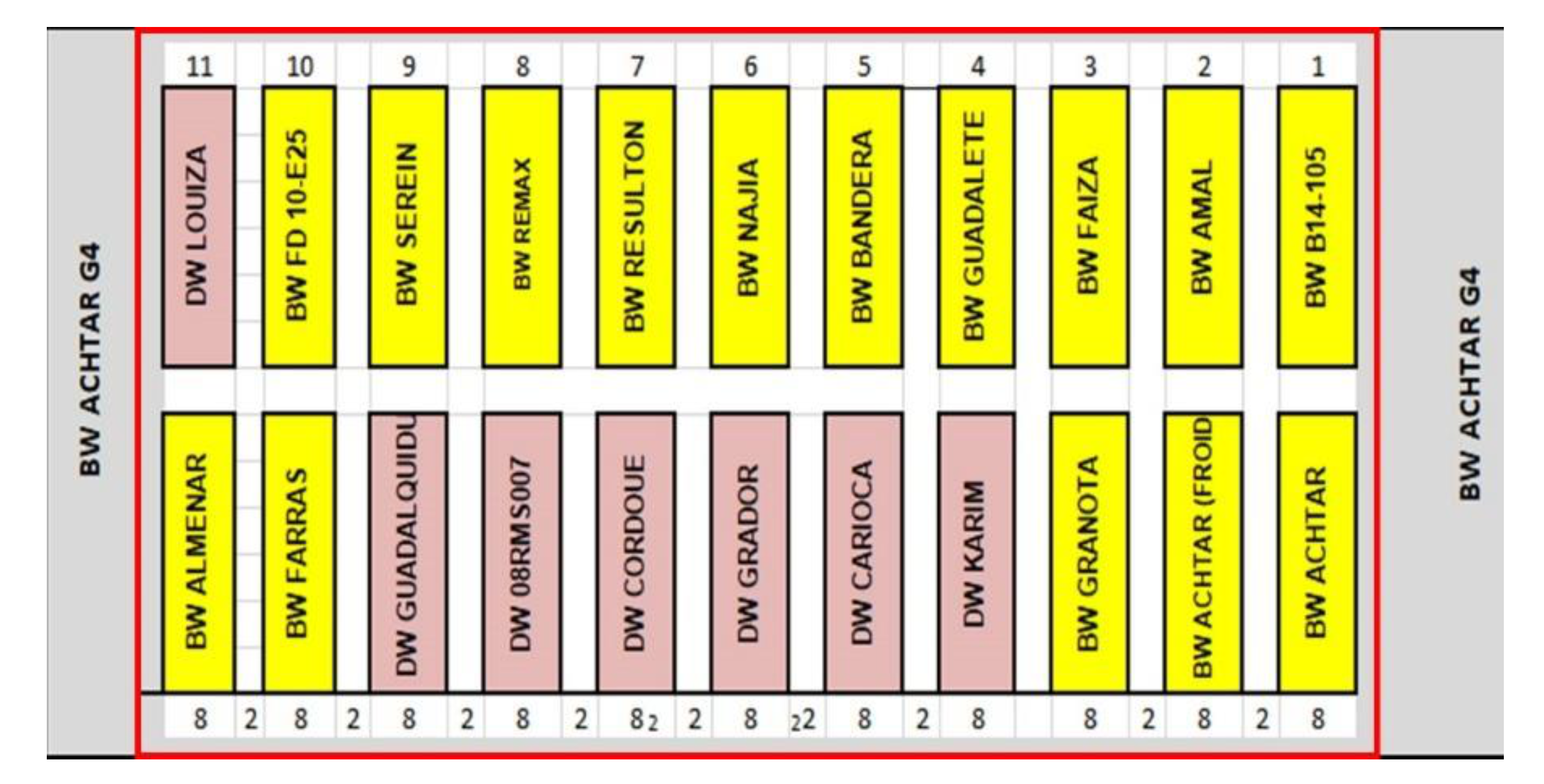
2.7. Building a Spatial Database for the Experimental Platform
2.8. Monitoring Wheat Growth
2.8.1. Varietal Approach
2.8.2. General Approach
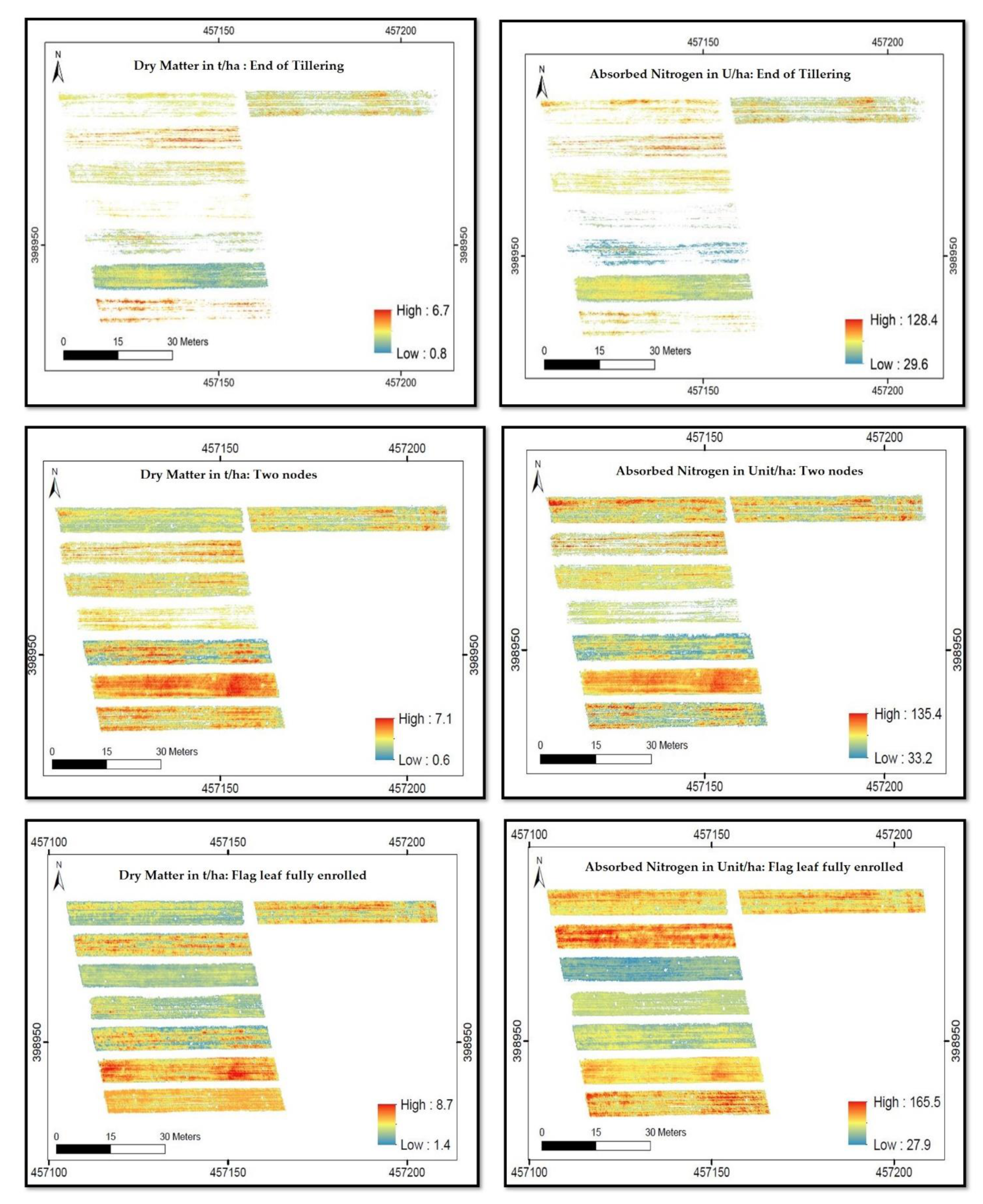
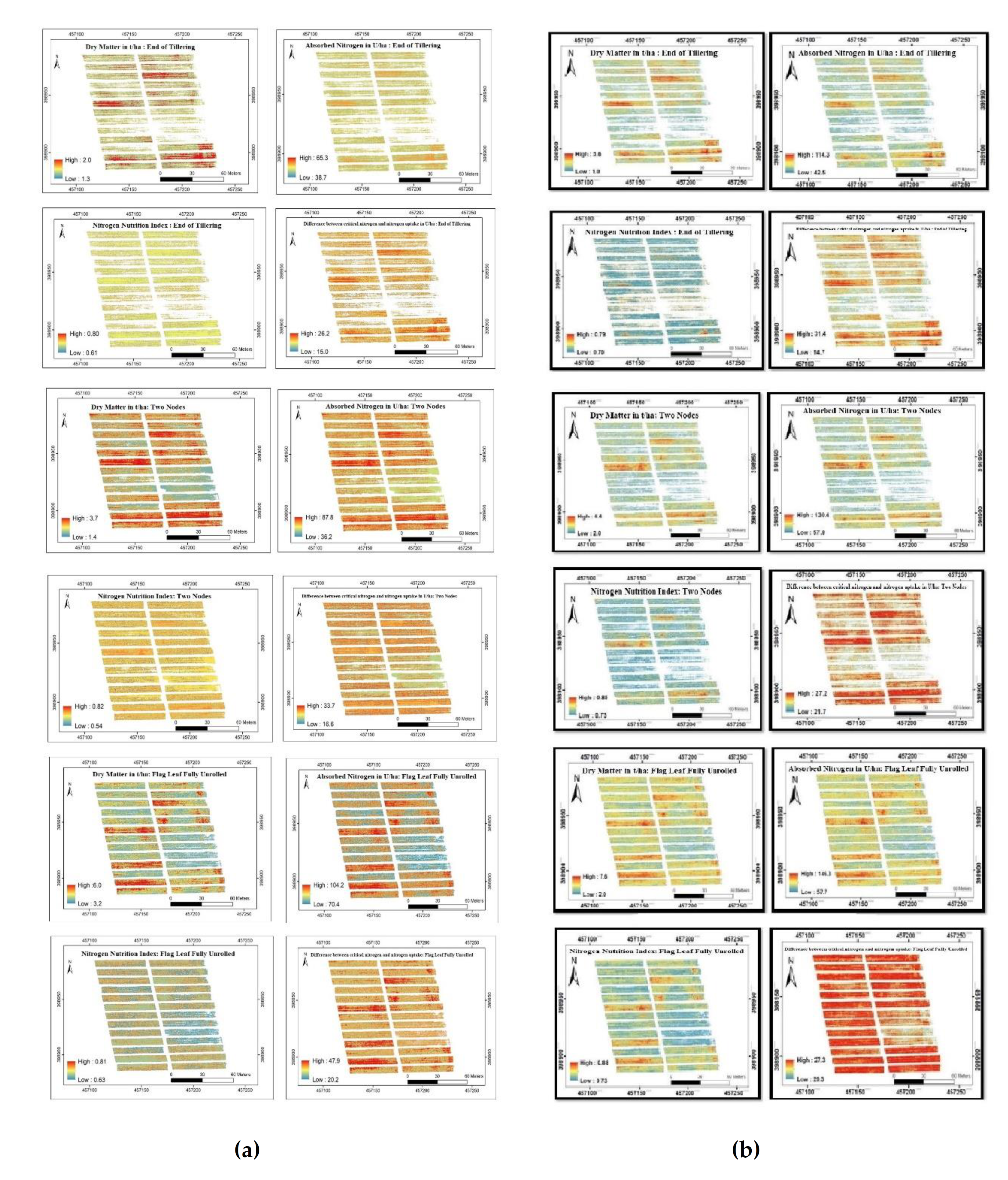
2.9. Mapping Critical Nitrogen, Dry Biomass and Nitrogen Nutrition Index
2.10. Wheat Yield Estimation Model
3. Results and Discussion
3.1. Vegetation Indices Maps and Reflectance Maps
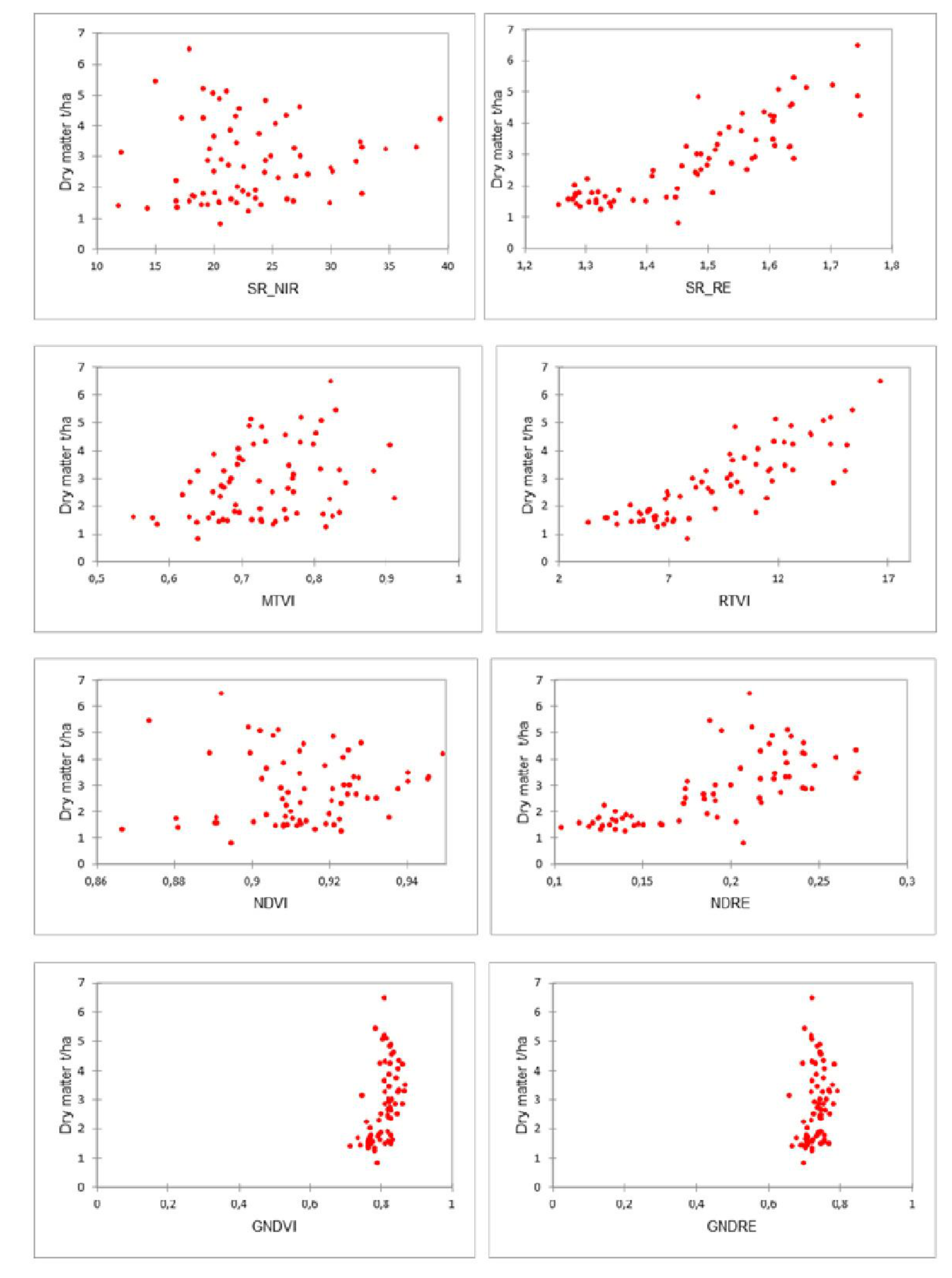
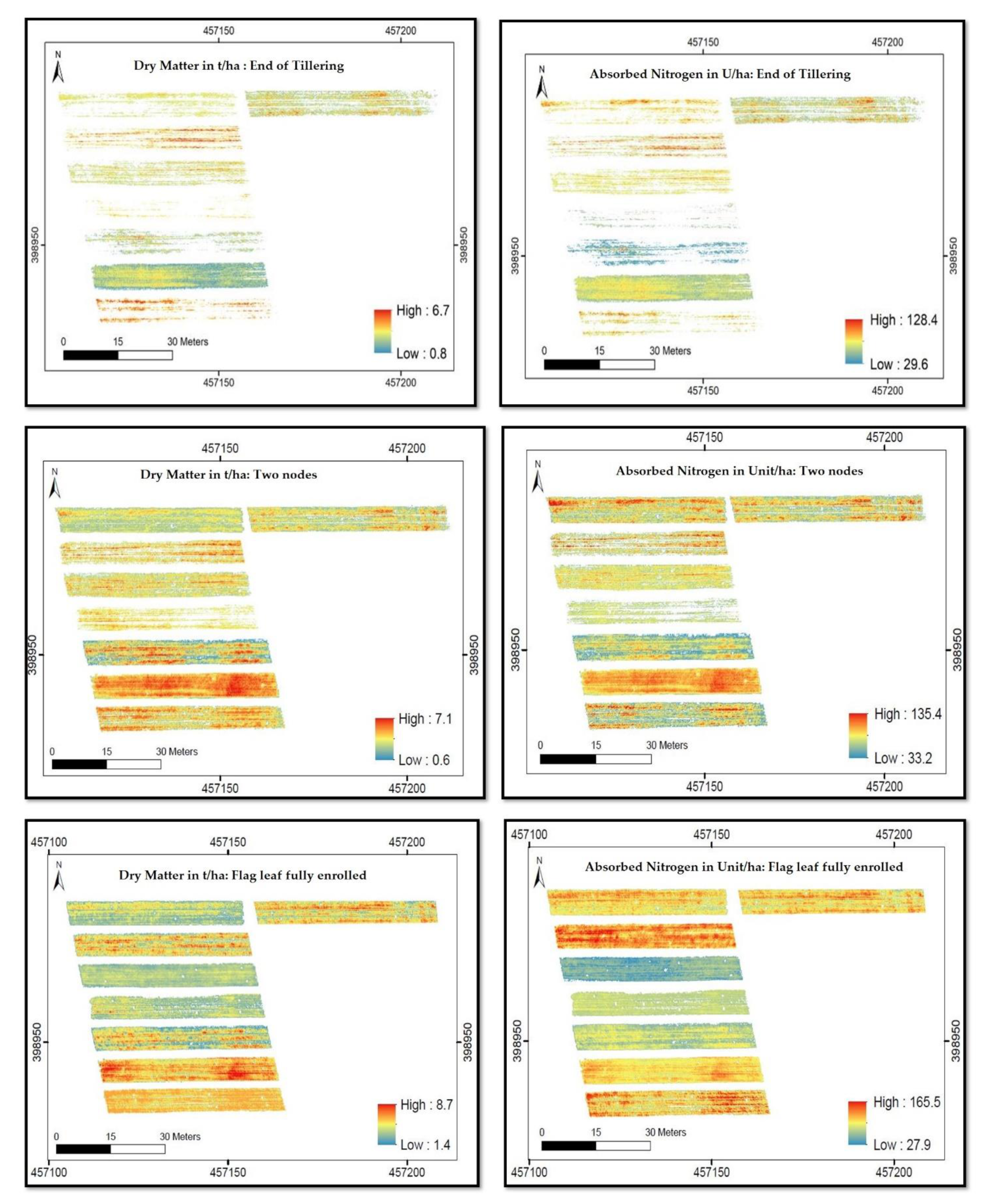
3.2. Statistical Modeling and Wheat’s Biophysical Parameters Mapping
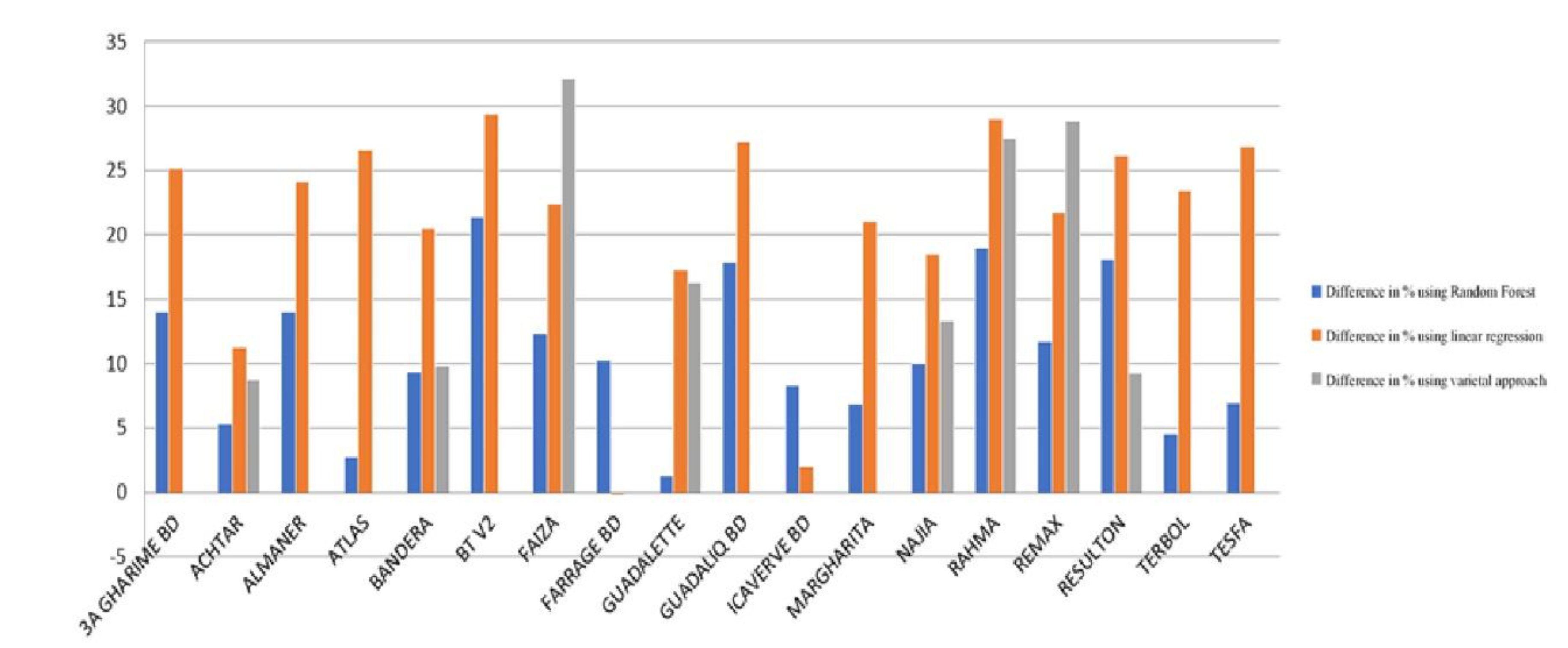
3.3. Wheat Yield Prediction
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- OECD/FAO. OECD-FAO Agricultural Outlook 2020–2029; OCDE: Paris, France; FAO: Rome, Italy, 2020. [Google Scholar] [CrossRef]
- Ahmad, L.; Mahdi, S.S. Components of Precision Agriculture. In Satellite Farming; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar] [CrossRef]
- King, A. Technology: The Future of Agriculture. Nature 2017. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Innovation—Feeding the World. Available online: http://www.fao.org/family-farming/detail/fr/c/340600/ (accessed on 29 March 2019).
- Precision Agriculture Market Analysis by Component (Hardware, Software & Services), By Technology (Variable Rate Technology, Remote sensing, Guidance Systems), By Application, By Region, And Segment Forecasts, 2014–2025. Available online: http://www.hexareports.com/report/precision-agriculture-market (accessed on 17 April 2019).
- Wahab, I.; Hall, O.; Jirström, M. Remote sensing of yields: Application of UAV imagery-derived ndvi for estimating maize vigor and yields in complex farming systems in Sub-Saharan Africa. Drones 2018, 2, 28. [Google Scholar] [CrossRef] [Green Version]
- Messina, G.; Modica, G. Applications of UAV Thermal Imagery in Precision Agriculture: State of the Art and Future Research Outlook. Remote Sens. 2020, 12, 1491. [Google Scholar] [CrossRef]
- Tao, H.; Feng, H.; Xu, L.; Miao, M.; Yang, G.; Yang, X.; Fan, L. Estimation of the Yield and Plant Height of Winter Wheat Using UAV-Based Hyperspectral Images. Sensors 2020, 20, 1231. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Balaghi, R.; Jlibene, M.; Tychon, B.; Eerens, H. Preface. In Prediction Agrometeorologique des Rendements Cerealiers au Maroc; National Institute for Agronomic Research of Morocco-INRA: Rabat, Morocco, 2012; pp. 1–10. [Google Scholar]
- Rehman, A.; Ahsan, M.; Latif, M.; Naseer, A. Mapping Wheat Crop Phenology and the Yield using Machine Learning (ML). Int. J. Adv. Comput. Sci. Appl. 2018, 9, 301–306. [Google Scholar]
- Tuvdendorj, B.; Wu, B.; Zeng, H.; Gantsetseg, B.; Nanzad, L. Determination of Appropriate Remote Sensing Indices for Spring Wheat Yield Estimation in Mongolia. Remote Sens. 2019, 11, 2568. [Google Scholar] [CrossRef] [Green Version]
- Hassan, M.; Yang, M.; Rasheed, A.; Yang, G.J.; Reynolds, M.; Xia, X.; Xiao, Y.; He, Z. A rapid monitoring of NDVI across the wheat growth cycle for grain yield prediction using a multi-spectral UAV platform. Plant Sci. 2018. [Google Scholar] [CrossRef] [PubMed]
- Guan, S.; Fukami, K.; Matsunaka, H.; Okami, M.; Tanaka, R.; Nakano, H.; Sakai, T.; Nakano, K.; Ohdan, H.; Takahashi, K. Assessing Correlation of High-Resolution NDVI with Fertilizer Application Level and Yield of Rice and Wheat Crops Using Small UAVs. Remote Sens. 2019, 11, 112. [Google Scholar] [CrossRef] [Green Version]
- Mesas-Carrascosa, F.-J.; Torres-Sánchez, J.; Clavero-Rumbao, I.; García-Ferrer, A.; Peña, J.-M.; Borra-Serrano, I.; López-Granados, F. Assessing Optimal Flight Parameters for Generating Accurate Multispectral Orthomosaicks by UAV to Support Site-Specific Crop Management. Remote Sens. 2015, 7, 12793–12814. [Google Scholar] [CrossRef] [Green Version]
- Coombes, M.; Fletcher, T.; Chen, W.-H.; Liu, C. Optimal Polygon Decomposition for UAV Survey Coverage Path Planning in Wind. Sensors 2018, 18, 2132. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cabreira, T.M.; Brisolara, L.B.; Ferreira, P.R., Jr. Survey on Coverage Path Planning with Unmanned Aerial Vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef] [Green Version]
- Jürgen, M. Analyse de Référence Selon la Méthode de Dumas ou la Méthode de Kjeldahl? Comparaison des Méthodes et Considérations pour L’analyse de L’azote/des Protéines dans les Denrées Alimentaires et les Aliments pour Animaux; Livre Blanc de FOSS; FOSS: Hilleroed, Denmark, 2017; Volume 1, pp. 1–5. [Google Scholar]
- Radiometric Calibration Target. Available online: https://support.pix4d.com/hc/en-us/articles/206494883-Radiometric-calibration-target (accessed on 18 June 2019).
- Xu, K.; Gong, Y.; Fang, S.; Wang, K.; Lin, Z.; Wang, F. Radiometric Calibration of UAV Remote Sensing Image with Spectral Angle Constraint. Remote Sen. 2019, 11, 1291. [Google Scholar] [CrossRef] [Green Version]
- Pix4D Mapper User Manual. 2017. Available online: https://support.pix4d.com/hc/en-us/articles/204272989-Offline-Getting-Started-and-Manual-pdf (accessed on 29 March 2019).
- Visockiene, J.S.; Domantas, B.; Ugnius, R. Comparison of UAV images processing softwares. J. Meas. Eng. 2014, 2, 111–121. [Google Scholar]
- eCognition User Manual. 2019. Available online: https://docs.ecognition.com/v9.5.0/eCognition_documentation (accessed on 17 April 2019).
- Hamilton, R.; Megown, K.; Mellin, T.; Fox, I. Guide to Automated Stand Delineation Using Image Segmentation; Report Number: RSAC-0094-RPT1; US Forest Service, Remote Sensing Applications Center: Salt Lake City, UT, USA, 2007. [Google Scholar]
- Fu, Z.; Jiang, J.; Gao, Y.; Krienke, B.; Wang, M.; Zhong, K.; Cao, Q.; Tian, Y.; Zhu, Y.; Cao, W.; et al. Wheat Growth Monitoring and Yield Estimation based on Multi-Rotor Unmanned Aerial Vehicle. Remote Sens. 2020, 12, 508. [Google Scholar] [CrossRef] [Green Version]
- Liakos, K.G.; Busato, P.; Moshou, D.; Pearson, S.; Bochtis, D. Machine Learning in Agriculture: A Review. Sensors 2018, 18, 2674. [Google Scholar]
- Han, S.; Kim, H. On the Optimal Size of Candidate Feature Set in Random forest. Appl. Sci. 2019, 9, 898. [Google Scholar] [CrossRef] [Green Version]
- Scikit Learn Documentation. Available online: https://scikit-learn.org/stable/modules/ensemble.html#forest (accessed on 3 March 2019).
- Anaconda Documentation. Available online: https://docs.anaconda.com/anaconda/install/ (accessed on 19 May 2019).
- Malik, U. Random Forest Algorithm with Python and Scikit-Learn. Available online: https://stackabuse.com/random-forest-algorithm-with-python-and-scikit-learn/ (accessed on 25 April 2019).
- Justes, E.; Mary, B.; Meynard, J.M. Evaluation of a nitrate test indicator to improve the nitrogen fertilization of winter wheat crops. Commun. Soil Sci. Plant Anal. 1995, 34, 2539–2551. [Google Scholar]
- Stafford, J.V. Precision Agriculture ’05; European Conference on Precision Agriculture; Wageningen Academic Publishers: Wageningen, The Netherlands, 2005; Available online: http://0-public-ebookcentral-proquest-com.brum.beds.ac.uk/choice/publicfullrecord.aspx?p=3572015 (accessed on 12 June 2019).
- Raun, R.; Solie, J.B.; Johnson, G.V. Improving Nitrogen Use Efficiency in Cereal Grain Production with Optical Sensing. Agron. J. 2001, 94, 815–820. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H. The model of wheat yield forecast based on modis-ndvi. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, I-7, 1–4. [Google Scholar]
- Whitbread, A.; Hancock, J. Estimating grain yield with the French and Schultz approaches vs simulating attainable yield with APSIM on the Eyre Peninsula. In Proceedings of the 14th Agronomy Conference, Adelaide, Australia, 21–25 September 2008. [Google Scholar]
- Marché Agricole des Céréales. Available online: www.terre-net.fr/marche-agricole (accessed on 22 April 2019).
- GIEWS—Global Information and Early Warning System. Available online: http://www.fao.org/giews/countrybrief/country.jsp?code=MAR (accessed on 15 March 2019).
- Beuerlein, J.E. Wheat Growth Stages and Associated Management; The Ohio State University Extension: Columbus, OH, USA, 2001. [Google Scholar]
- Geng, H.; Beecher, B.; He, Z.; Morris, C.F. Physical Mapping of Genes in Wheat using ‘Chinese Spring’ Chromosome Group 7 Deletion Lines. Crop Sci. 2012, 52, 2674–2678. [Google Scholar] [CrossRef]






| Dependent Variables | End of Tillering | Two Nodes | Last Leaf Flag Unrolled | |||
|---|---|---|---|---|---|---|
| R2 | RMSE | R2 | RMSE | R2 | RMSE | |
| Dry matter | 0.717 | 0.136 | 0.779 | 0.600 | 0.781 | 0.789 |
| Nitrogen uptake | 0.632 | 7.284 | 0.742 | 15.148 | 0.669 | 17.329 |
| Dependent Variables | Model | R2 | RMSE |
|---|---|---|---|
| Dry matter | 0.761 | 0.63 | |
| Nitrogen uptake | 0.638 | 12.86 |
| Dependent Variables | Linear Model | 2nd Order Polynomial Model | Exponential Model | |||
|---|---|---|---|---|---|---|
| R2 | RMSE | R2 | RMSE | R2 | RMSE | |
| Dry matter | 0.761 | 0.63 | 0.741 | 0.67 | 0.690 | 0.67 |
| Nitrogen uptake | 0.638 | 12.86 | 0.635 | 12.81 | 0.576 | 14.00 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV Specifications | Camera Specifications | ||
|---|---|---|---|
| UAV type | Fixed-wing | Sensor type | 4 × 1/3″ CMOS |
| Weight (including battery and payload) | 690 g | Acquisition bands | Green (550 nm)—Red (660 nm)—Red-Edge (735 nm)—NIR (790 nm) |
| Radio link range | 3 km | Storage | SD card |
| Piloting | Automatic | Focal length | 4 mm |
| Speed | 40–90 km/h | F-number | f/1.8 |
| Wind resistance | Up to 12 m/s | Shutter type | Global shutter |
| Nominal maximal flight time | 50 min | Degrees of freedom | Nadiral acquisition only |
| Landing | Linear (precision of 5 m) | Weight | 160 g |
| Absolute horizontal/vertical precision (using GCP) | Up to 3 cm/5 cm | Output image | 4 Images in tif format with raw 10 bits |
| Absolute horizontal/vertical precision (without using GCP) | 1–5 m | Ground/spatial resolutions | 5–30 cm |
| Flight 1 | Flight 2 | Flight 3 | Flight 4 | Flight 5 | Flight 6 | Flight 7 | |
|---|---|---|---|---|---|---|---|
| Duration | 10 min | 10 min | 10 min | 10 min | 10 min | 10 min | 10 min |
| Flight altitude | 60 m | 60 m | 60 m | 60 m | 60 m | 60 m | 60 m |
| GSD | 6 cm | 6 cm | 6 cm | 6 cm | 6 cm | 6 cm | 6 cm |
| Lateral overlap | 70% | 70% | 70% | 70% | 70% | 70% | 70% |
| Longitudinal overlap | 80% | 80% | 80% | 80% | 80% | 80% | 80% |
| Covered area | 6 ha | 6 ha | 6 ha | 6 ha | 6 ha | 6 ha | 6 ha |
| Mission date | 12 February 2019 | 22 February 2019 | 14 March 2019 | 15 May 2019 | |||
| Phenological stage | End of tillering | Two nodes | Flag leaf fully unrolled | Ripening | |||
| Index | Formula | Reference |
|---|---|---|
| Simple Ratio | Birth et al. (1968) | |
| Simple Ratio Red Edge | Zacro-Teiada et al. (1999) | |
| NDVI | Rouse et al. (1974) | |
| NDRE | Fitzgerald et al. (2010) | |
| GNDVI | Gitelson et al. (1996) | |
| GNDRE | Cao et al. (2013) | |
| MTVI2 | Haboudane et al. (2004) | |
| RTVI | ) | Chen et al. (2010) |
| Vegetation Index | Linear Model | 2nd Order Polynomial Model | Exponential Model | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Dry Matter | Nitrogen Uptake | Dry Matter | Nitrogen Uptake | DRY Matter | Nitrogen Uptake | |||||||
| R2 | RMSE | R2 | RMSE | R2 | RMSE | R2 | RMSE | R2 | RMSE | R2 | RMSE | |
| NDVI | 0.229 | 1.182 | 0.240 | 18.795 | 0.511 | 1.012 | 0.478 | 17.479 | 0.337 | 1.115 | 0.172 | 20.899 |
| NDRE | 0.554 | 1.175 | 0.520 | 14.566 | 0.760 | 0.710 | 0.581 | 16.097 | 0.666 | 0.761 | 0.538 | 13.911 |
| GNDVI | 0.398 | 1.000 | 0.268 | 16.849 | 0.552 | 1.092 | 0.489 | 16.639 | 0.482 | 0.959 | 0.325 | 17.104 |
| GNDRE | 0.225 | 3.940 | 0.219 | 20.416 | 0.308 | 4.111 | 0.391 | 21.129 | 0.351 | 3.966 | 0.215 | 19.645 |
| MTVI | 0.185 | 1.244 | 0.147 | 20.914 | 0.364 | 1.191 | 0.258 | 19.981 | 0.103 | 1.348 | 0.133 | 18.648 |
| RTVI | 0.774 | 0.625 | 0.687 | 11.581 | 0.824 | 0.655 | 0.700 | 13.755 | 0.795 | 0.614 | 0.585 | 13.742 |
| SR_NIR | 0.189 | 1.514 | 0.162 | 20.560 | 0.444 | 1.172 | 0.435 | 18.543 | 0.167 | 1.327 | 0.239 | 19.893 |
| SR_RE | 0.736 | 0.661 | 0.619 | 13.055 | 0.794 | 0.651 | 0.702 | 12.349 | 0.763 | 0.659 | 0.600 | 12.138 |
| Dependent Variables | Linear Model | 2nd Order Polynomial Model | Exponential Model | |||
|---|---|---|---|---|---|---|
| R2 | RMSE | R2 | RMSE | R2 | RMSE | |
| Dry matter | 0.761 | 0.63 | 0.741 | 0.67 | 0.690 | 0.67 |
| Nitrogen uptake | 0.638 | 12.86 | 0.635 | 12.81 | 0.576 | 14.00 |
| Dependent Variables | Model | R2 | RMSE |
|---|---|---|---|
| Dry matter | 0.761 | 0.63 | |
| Nitrogen uptake | 0.638 | 12.86 |
| Dependent Variables | End of Tillering | Two Nodes | Last Leaf Flag Unrolled | |||
|---|---|---|---|---|---|---|
| R2 | RMSE | R2 | RMSE | R2 | RMSE | |
| Dry matter | 0.717 | 0.136 | 0.779 | 0.600 | 0.781 | 0.789 |
| Nitrogen uptake | 0.632 | 7.284 | 0.742 | 15.148 | 0.669 | 17.329 |
| Variety | Predicted Yield (t/ha) |
|---|---|
| ACHTAR | 2.934 |
| REMAX | 2.887 |
| BANDERA | 2.262 |
| FAIZA | 2.316 |
| GUADALETTE | 3.351 |
| RAHMA | 2.612 |
| NAJIA | 2.373 |
| RESULTON | 3.175 |
| Variety | Harvested Yield (t/ha) | Predicted Yield (t/ha) | |
|---|---|---|---|
| Random Forest | Linear Regression | ||
| 3A GHARIME BD | 3.400 | 2.866 | 2.495 |
| ACHTAR | 2.754 | 2.828 | 2.248 |
| ALBIANO | 0.782 | 2.684 | 2.756 |
| ALMANER | 3.570 | 2.773 | 2.657 |
| ATLAS | 2.720 | 2.595 | 1.958 |
| BANDERA | 3.264 | 2.901 | 2.541 |
| BT V2 | 4.114 | 3.170 | 2.849 |
| BT V3 | 4.488 | 3.040 | 2.704 |
| FAIZA | 3.400 | 2.923 | 2.586 |
| FARRAGE BD | 3.230 | 3.493 | 3.174 |
| FARRAS | 4.624 | 3.281 | 2.946 |
| FEELIN | 1.292 | 2.970 | 2.577 |
| GUADALETTE | 2.822 | 2.730 | 2.286 |
| GUADALIQ BD | 3.740 | 3.011 | 2.667 |
| ICAVERVE BD | 3.366 | 3.574 | 3.233 |
| IDAN 39 | 4.658 | 3.104 | 2.767 |
| MARGHARITA | 3.230 | 2.948 | 2.583 |
| NACHIT BD | 4.658 | 3.129 | 2.802 |
| NAJIA | 3.944 | 3.479 | 3.149 |
| RAHMA | 3.672 | 2.918 | 2.555 |
| REMAX | 3.400 | 2.944 | 2.606 |
| RESULTON | 3.570 | 2.869 | 2.500 |
| TERBOL | 2.856 | 2.674 | 2.147 |
| TESFA | 2.890 | 2.637 | 2.076 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Astaoui, G.; Dadaiss, J.E.; Sebari, I.; Benmansour, S.; Mohamed, E. Mapping Wheat Dry Matter and Nitrogen Content Dynamics and Estimation of Wheat Yield Using UAV Multispectral Imagery Machine Learning and a Variety-Based Approach: Case Study of Morocco. AgriEngineering 2021, 3, 29-49. https://0-doi-org.brum.beds.ac.uk/10.3390/agriengineering3010003
Astaoui G, Dadaiss JE, Sebari I, Benmansour S, Mohamed E. Mapping Wheat Dry Matter and Nitrogen Content Dynamics and Estimation of Wheat Yield Using UAV Multispectral Imagery Machine Learning and a Variety-Based Approach: Case Study of Morocco. AgriEngineering. 2021; 3(1):29-49. https://0-doi-org.brum.beds.ac.uk/10.3390/agriengineering3010003
Chicago/Turabian StyleAstaoui, Ghizlane, Jamal Eddine Dadaiss, Imane Sebari, Samir Benmansour, and Ettarid Mohamed. 2021. "Mapping Wheat Dry Matter and Nitrogen Content Dynamics and Estimation of Wheat Yield Using UAV Multispectral Imagery Machine Learning and a Variety-Based Approach: Case Study of Morocco" AgriEngineering 3, no. 1: 29-49. https://0-doi-org.brum.beds.ac.uk/10.3390/agriengineering3010003