
Novel Route Planning Method to Improve the Operational Efficiency of Capacitated Operations. Case: Application of Organic Fertilizer



Abstract
:1. Introduction
2. Materials and Methods
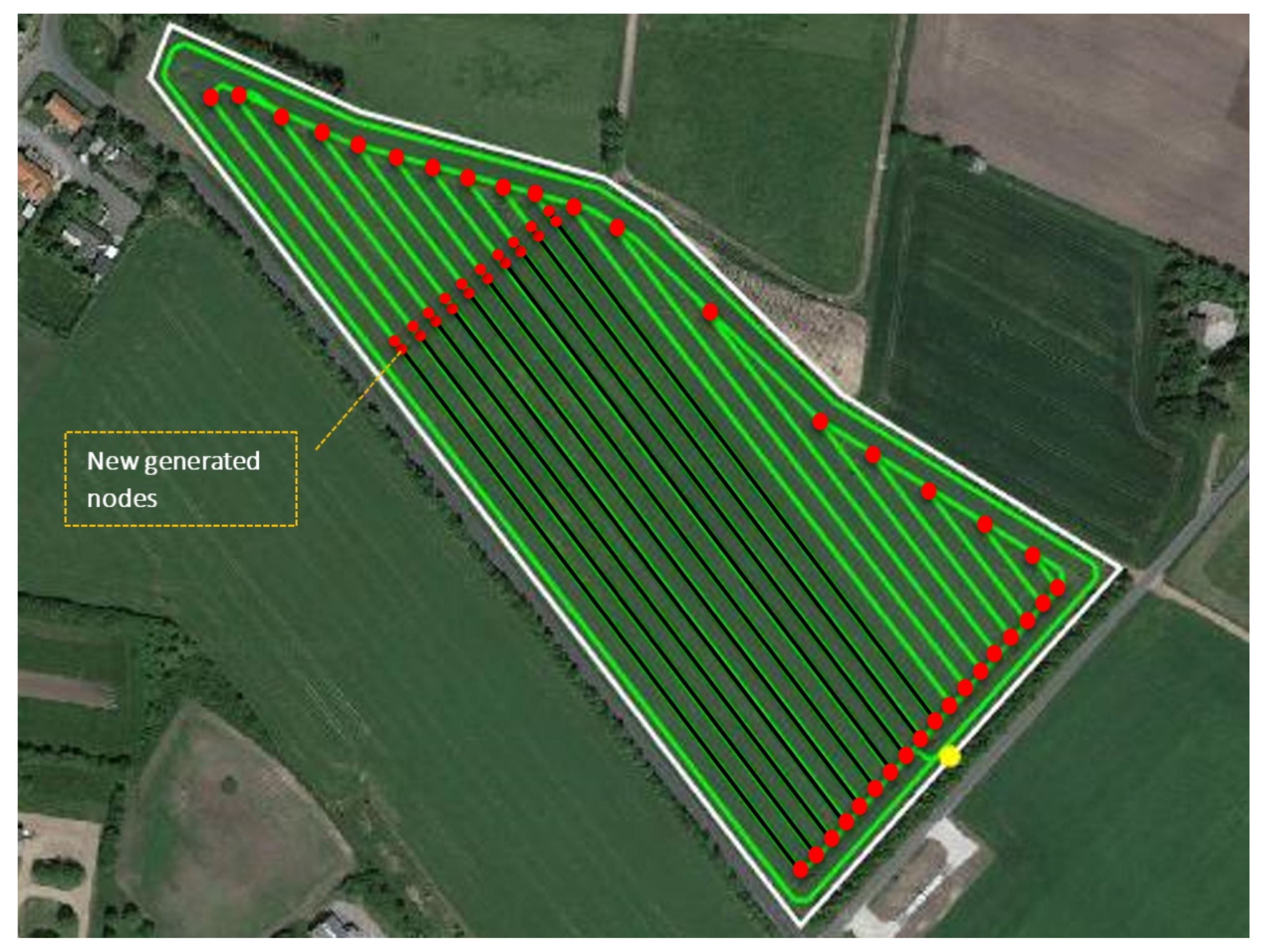
2.1. Division Action
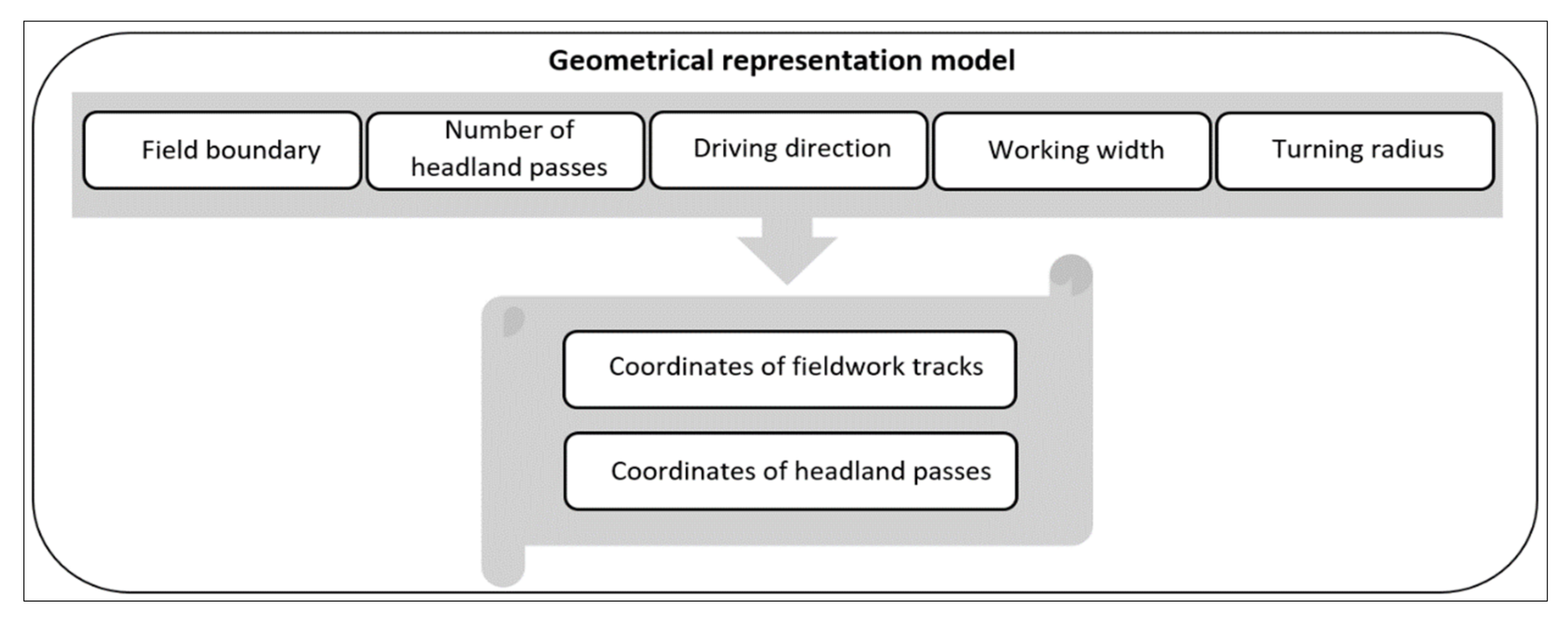
2.2. Geometrical Representation Model
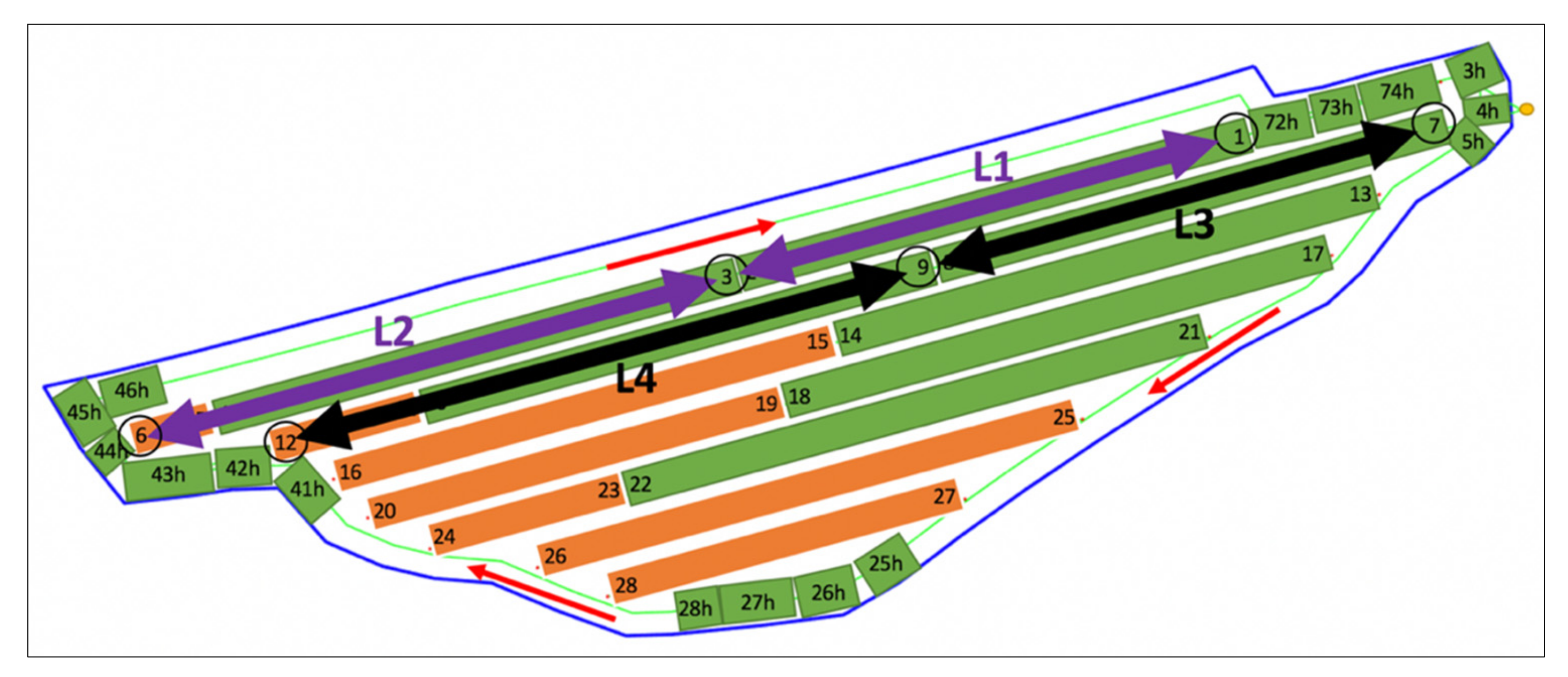
2.3. Cost Matrix Generation
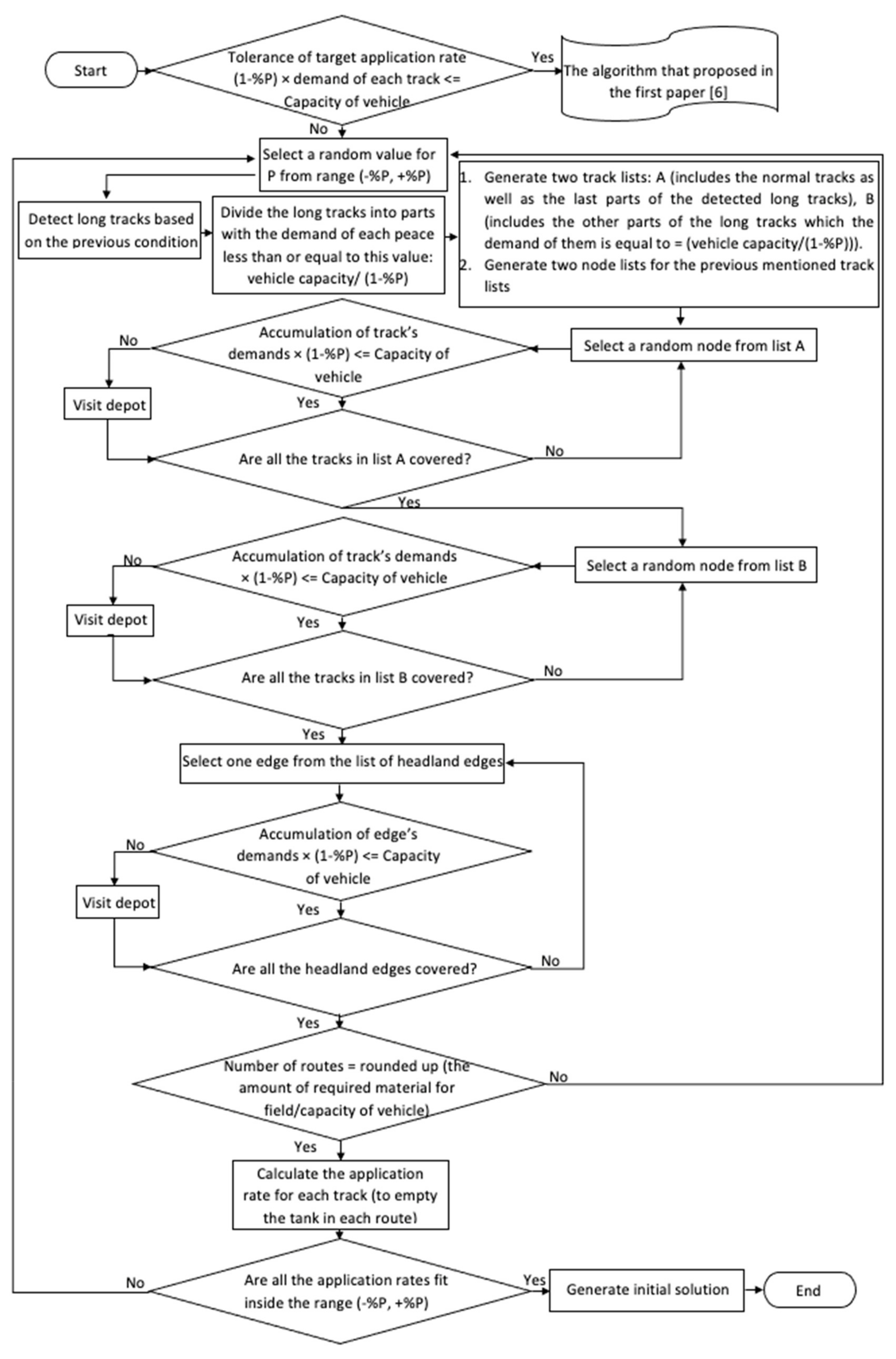
2.4. Optimization Algorithm
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node/Edge ID | Application Rate (liter/m2) | Node/Edge ID | Application Rate (liter/m2) |
|---|---|---|---|
| 1,2 | 1.067 | ‘62h’ | 0.899 |
| 3,4 | 1.067 | ‘63h’ | 0.899 |
| 5,6 | 1.067 | ‘64h’ | 0.899 |
| 7,8 | 1.067 | ‘65h’ | 0.899 |
| 9,10 | 1.067 | ‘66h’ | 0.899 |
| 11,12 | 1.067 | ‘67h’ | 0.899 |
| 13,14 | 0.995 | ‘68h’ | 0.899 |
| 15,16 | 0.995 | ‘69h’ | 0.899 |
| 17,18 | 0.995 | ‘70h’ | 0.899 |
| 19,20 | 0.995 | ‘71h’ | 0.899 |
| 21,22 | 0.995 | ‘72h’ | 0.899 |
| 23,24 | 0.995 | ‘73h’ | 0.899 |
| 25,26 | 0.995 | ‘74h’ | 0.899 |
| 27,28 | 0.995 | ‘75h’ | 0.899 |
| 29,30 | 0.995 | ‘76h’ | 0.899 |
| 31,32 | 0.995 | ‘77h’ | 0.899 |
| ‘3h’ | 0.899 | ‘78h’ | 0.899 |
| ‘4h’ | 0.899 | ‘79h’ | 0.899 |
| ‘5h’ | 0.899 | ‘80h’ | 0.899 |
| ‘6h’ | 0.899 | ‘81h’ | 0.899 |
| ‘7h’ | 0.899 | ‘82h’ | 0.899 |
| ‘8h’ | 0.899 | ‘83h’ | 0.899 |
| ‘9h’ | 0.899 | ‘84h’ | 0.899 |
| ‘10h’ | 0.899 | ‘85h’ | 0.899 |
| ‘11h’ | 0.899 | ‘86h’ | 0.899 |
| ‘12h’ | 0.899 | ‘87h’ | 0.899 |
| ‘13h’ | 0.899 | ‘88h’ | 0.899 |
| ‘14h’ | 0.899 | ‘89h’ | 0.899 |
| ‘15h’ | 0.899 | ‘90h’ | 0.899 |
| ‘16h’ | 0.899 | ‘91h’ | 0.899 |
| ‘17h’ | 0.899 | ‘92h’ | 0.899 |
| ‘18h’ | 0.899 | ‘93h’ | 0.899 |
| ‘19h’ | 0.899 | ‘94h’ | 0.899 |
| ‘20h’ | 0.899 | ‘96h’ | 0.899 |
| ‘21h’ | 0.899 | ‘97h’ | 0.899 |
| ‘22h’ | 0.899 | ‘98h’ | 0.899 |
| ‘23h’ | 0.899 | ‘99h’ | 0.899 |
| ‘24h’ | 0.899 | ‘100h’ | 0.899 |
| ‘25h’ | 0.899 | ‘101h’ | 0.899 |
| ‘26h’ | 0.899 | ‘102h’ | 0.899 |
| ‘27h’ | 0.899 | ‘103h’ | 0.899 |
| ‘28h’ | 0.899 | ‘104h’ | 0.899 |
| ‘29h’ | 0.899 | ‘105h’ | 0.899 |
| ‘30h’ | 0.899 | ‘106h’ | 0.899 |
| ‘31h’ | 0.899 | ‘107h’ | 0.899 |
| ‘32h’ | 0.899 | ‘108h’ | 0.899 |
| ‘33h’ | 0.899 | ‘109h’ | 0.899 |
| ‘34h’ | 0.899 | ‘110h’ | 0.899 |
| ‘35h’ | 0.899 | ‘111h’ | 0.899 |
| ‘36h’ | 0.899 | ‘112h’ | 0.899 |
| ‘37h’ | 0.899 | ‘113h’ | 0.899 |
| ‘38h’ | 0.899 | ‘114h’ | 0.899 |
| ‘39h’ | 0.899 | ‘115h’ | 0.899 |
| ‘40h’ | 0.899 | ‘116h’ | 0.899 |
| ‘41h’ | 0.899 | ‘117h’ | 0.899 |
| ‘42h’ | 0.899 | ‘118h’ | 0.899 |
| ‘43h’ | 0.899 | ‘119h’ | 0.899 |
| ‘44h’ | 0.899 | ‘120h’ | 0.899 |
| ‘45h’ | 0.899 | ‘121h’ | 0.899 |
| ‘46h’ | 0.899 | ‘122h’ | 0.899 |
| ‘47h’ | 0.899 | ‘123h’ | 0.899 |
| ‘48h’ | 0.899 | ‘124h’ | 0.899 |
| ‘49h’ | 0.899 | ‘125h’ | 0.899 |
| ‘50h’ | 0.899 | ‘126h’ | 0.899 |
| ‘51h’ | 0.899 | ‘127h’ | 0.899 |
| ‘52h’ | 0.899 | ‘128h’ | 0.899 |
| ‘53h’ | 0.899 | ‘129h’ | 0.899 |
| ‘54h’ | 0.899 | ‘130h’ | 0.899 |
| ‘55h’ | 0.899 | ‘131h’ | 0.899 |
| ‘56h’ | 0.899 | ‘132h’ | 0.899 |
| ‘57h’ | 0.899 | ‘133h’ | 0.899 |
| ‘58h’ | 0.899 | ‘134h’ | 0.899 |
| ‘59h’ | 0.899 | ‘135h’ | 0.899 |
| ‘60h’ | 0.899 | ‘136h’ | 0.899 |
| ‘61h’ | 0.899 | ‘137h’ | 0.899 |
| Node/Edge ID | Application Rate (liter/m2) | Node/Edge ID | Application Rate (liter/m2) |
|---|---|---|---|
| 3,4 | 1.020 | ‘35h’ | 0.708 |
| 5,6 | 0.912 | ‘36h’ | 0.708 |
| 7,8 | 1.020 | ‘37h’ | 0.708 |
| 9,10 | 0.912 | ‘38h’ | 0.708 |
| 11,12 | 1.020 | ‘39h’ | 0.708 |
| 13,14 | 1.271 | ‘40h’ | 0.708 |
| 15,16 | 1.020 | ‘41h’ | 0.708 |
| 17,18 | 1.271 | ‘42h’ | 0.708 |
| 19,20 | 1.020 | ‘43h’ | 0.708 |
| 21,22 | 0.892 | ‘44h’ | 0.708 |
| 23,24 | 1.020 | ‘45h’ | 0.708 |
| 25,26 | 0.892 | ‘46h’ | 0.708 |
| 27,28 | 1.020 | ‘47h’ | 0.708 |
| 29,30 | 0.892 | ‘48h’ | 0.708 |
| 31,32 | 1.020 | ‘49h’ | 0.708 |
| 33,34 | 0.953 | ‘50h’ | 0.708 |
| 35,36 | 1.020 | ‘51h’ | 1.063 |
| 37,38 | 0.953 | ‘52h’ | 1.063 |
| 39,40 | 1.020 | ‘53h’ | 1.063 |
| 41,42 | 0.953 | ‘54h’ | 1.063 |
| 43,44 | 1.020 | ‘55h’ | 1.063 |
| 45,46 | 1.023 | ‘56h’ | 1.063 |
| 47,48 | 1.020 | ‘57h’ | 1.063 |
| 49,50 | 1.023 | ‘58h’ | 1.063 |
| 51,52 | 1.020 | ‘59h’ | 1.063 |
| 53,54 | 1.023 | ‘60h’ | 1.063 |
| 55,56 | 1.020 | ‘61h’ | 1.063 |
| 57,58 | 1.102 | ‘62h’ | 1.063 |
| 59,60 | 1.020 | ‘63h’ | 1.063 |
| 61,62 | 1.102 | ‘64h’ | 1.063 |
| 63,64 | 1.020 | ‘65h’ | 1.063 |
| 65,66 | 1.102 | ‘66h’ | 1.063 |
| 67,68 | 1.020 | ‘67h’ | 1.063 |
| 69,70 | 0.910 | ‘68h’ | 1.063 |
| 71,72 | 1.020 | ‘69h’ | 1.063 |
| 73,74 | 0.910 | ‘70h’ | 1.063 |
| 75,76 | 1.020 | ‘71h’ | 1.063 |
| 77,78 | 0.910 | ‘72h’ | 1.063 |
| 79,80 | 1.020 | ‘73h’ | 1.063 |
| 81,82 | 0.910 | ‘74h’ | 1.063 |
| 83,84 | 1.020 | ‘75h’ | 1.063 |
| 85,86 | 0.994 | ‘76h’ | 1.063 |
| 87,88 | 1.020 | ‘77h’ | 1.063 |
| 89,90 | 0.994 | ‘78h’ | 1.063 |
| 91,92 | 1.020 | ‘79h’ | 1.063 |
| 93,94 | 0.994 | ‘80h’ | 1.063 |
| 95,96 | 1.020 | ‘81h’ | 1.063 |
| 97,98 | 0.994 | ‘82h’ | 1.063 |
| 99,100 | 1.020 | ‘83h’ | 1.063 |
| 101,102 | 0.994 | ‘84h’ | 1.063 |
| 103,104 | 1.020 | ‘85h’ | 1.063 |
| 105,106 | 0.932 | ‘86h’ | 0.709 |
| 107,108 | 1.020 | ‘87h’ | 0.709 |
| 109,110 | 0.932 | ‘88h’ | 0.709 |
| 111,112 | 1.020 | ‘89h’ | 0.709 |
| 113,114 | 0.932 | ‘90h’ | 0.709 |
| 115,116 | 1.020 | ‘91h’ | 0.709 |
| 117,118 | 0.932 | ‘92h’ | 0.709 |
| 119,120 | 1.020 | ‘93h’ | 0.709 |
| 121,122 | 0.932 | ‘94h’ | 0.709 |
| 123,124 | 1.020 | ‘95h’ | 0.709 |
| 125,126 | 0.932 | ‘96h’ | 0.709 |
| 127,128 | 1.020 | ‘97h’ | 0.709 |
| 129,130 | 0.932 | ‘98h’ | 0.709 |
| 131,132 | 1.020 | ‘99h’ | 0.709 |
| 133,134 | 0.932 | ‘100h’ | 0.709 |
| 135,136 | 1.020 | ‘101h’ | 0.709 |
| 137,138 | 0.932 | ‘102h’ | 0.709 |
| 139,140 | 1.020 | ‘103h’ | 0.709 |
| ‘141,142 | 0.994 | ‘104h’ | 0.709 |
| 143,144 | 1.020 | ‘105h’ | 0.709 |
| 145,146 | 0.994 | ‘106h’ | 0.709 |
| 147,148 | 1.020 | ‘107h’ | 0.709 |
| 149,150 | 0.910 | ‘108h’ | 0.709 |
| 151,152 | 1.020 | ‘109h’ | 0.709 |
| 153,154 | 0.910 | ‘110h’ | 0.709 |
| 155,156 | 1.020 | ‘111h’ | 0.709 |
| 157,158 | 0.910 | ‘112h’ | 0.709 |
| 159,160 | 1.020 | ‘113h’ | 0.709 |
| 161,162 | 0.910 | ‘114h’ | 0.709 |
| 163,164 | 1.020 | ‘115h’ | 0.709 |
| 165,166 | 0.910 | ‘116h’ | 0.709 |
| 167,168 | 1.020 | ‘117h’ | 0.709 |
| 169,170 | 0.910 | ‘118h’ | 0.709 |
| 171,172 | 1.020 | ‘119h’ | 0.709 |
| 173,174 | 1.210 | ‘120h’ | 0.709 |
| 175,176 | 1.020 | ‘121h’ | 0.709 |
| 177,178 | 1.210 | ‘122h’ | 0.709 |
| 179,180 | 1.020 | ‘123h’ | 0.709 |
| 181,182 | 1.210 | ‘124h’ | 0.709 |
| 183,184 | 1.020 | ‘125h’ | 0.709 |
| 185,186 | 1.210 | ‘126h’ | 0.709 |
| ‘5h’ | 0.708 | ‘127h’ | 0.709 |
| ‘6h’ | 0.708 | ‘128h’ | 0.709 |
| ‘7h’ | 0.708 | ‘129h’ | 0.709 |
| ‘8h’ | 0.708 | ‘130h’ | 1.063 |
| ‘9h’ | 0.708 | ‘131h’ | 1.063 |
| ‘10h’ | 0.708 | ‘132h’ | 1.063 |
| ‘11h’ | 0.708 | ‘133h’ | 1.063 |
| ‘12h’ | 0.708 | ‘134h’ | 0.708 |
| ‘13h’ | 0.708 | ‘135h’ | 0.708 |
| ‘14h’ | 0.708 | ‘136h’ | 0.708 |
| ‘15h’ | 0.708 | ‘137h’ | 0.708 |
| ‘16h’ | 0.708 | ‘138h’ | 0.708 |
| ‘17h’ | 0.708 | ‘139h’ | 0.708 |
| ‘18h’ | 0.708 | ‘140h’ | 0.708 |
| ‘19h’ | 0.708 | ‘141h’ | 0.708 |
| ‘20h’ | 0.708 | ‘142h’ | 0.708 |
| ‘21h’ | 0.708 | ‘143h’ | 0.708 |
| ‘22h’ | 0.708 | ‘144h’ | 0.708 |
| ‘23h’ | 0.708 | ‘145h’ | 0.708 |
| ‘24h’ | 0.708 | ‘146h’ | 0.708 |
| ‘25h’ | 0.708 | ‘147h’ | 0.708 |
| ‘26h’ | 0.708 | ‘148h’ | 0.708 |
| ‘27h’ | 0.708 | ‘149h’ | 0.708 |
| ‘28h’ | 0.708 | ‘150h’ | 0.708 |
| ‘29h’ | 0.708 | ‘151h’ | 0.708 |
| ‘30h’ | 0.708 | ‘152h’ | 0.708 |
| ‘31h’ | 0.708 | ‘153h’ | 0.708 |
| ‘32h’ | 0.708 | ‘154h’ | 0.708 |
| ‘33h’ | 0.708 | ‘155h’ | 0.708 |
| ‘34h’ | 0.708 |
References
- Moghadam, E.K.; Vahdanjoo, M.; Jensen, A.L.; Sharifi, M.; Sørensen, C.A.G. An Arable Field for Benchmarking of Metaheuristic Algorithms for Capacitated Coverage Path Planning Problems. Agronomy 2020, 10, 1454. [Google Scholar] [CrossRef]
- Moisiadis, V.; Tsolakis, N.; Katikaridis, D.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Mobile Robotics in Agricultural Operations: A Narrative Review on Planning Aspects. Appl. Sci. 2020, 10, 3453. [Google Scholar] [CrossRef]
- Khajepour, A.; Sheikhmohammady, M.; Nikbakhsh, E. Field path planning using capacitated arc routing problem. Comput. Electron. Agric. 2020, 173, 105401. [Google Scholar] [CrossRef]
- Vahdanjoo, M.; Zhou, K.; Sørensen, C.A.G. Route Planning for Agricultural Machines with Multiple Depots: Manure Application Case Study. Agronomy 2020, 10, 1608. [Google Scholar] [CrossRef]
- Filip, M.; Zoubek, T.; Bumbalek, R.; Cerny, P.; Batista, C.; Olsan, P.; Bartos, P.; Kriz, P.; Xiao, M.; Dolan, A.; et al. Advanced Computational Methods for Agriculture Machinery Movement Optimization with Applications in Sugarcane Production. Agriculture 2020, 10, 434. [Google Scholar] [CrossRef]
- Vahdanjoo, M.; Madsen, C.T.; Sørensen, C.G. Novel Route Planning System for Machinery Selection. Case: Slurry Application. AgriEngineering 2020, 2, 408–429. [Google Scholar] [CrossRef]
- Campo, L.V.; Ledezma, A.; Corrales, J.C. Optimization of coverage mission for lightweight unmanned aerial vehicles applied in crop data acquisition. Expert Syst. Appl. 2020, 149, 113227. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sørensen, C.G.; Busato, P.; Berruto, R. Benefits from optimal route planning based on B-patterns. Biosyst. Eng. 2013, 115, 389–395. [Google Scholar] [CrossRef]
- Hameed, I.A.; Bochtis, D.D.; Sorensen, C.G. Driving Angle and Track Sequence Optimization for Operational Path Planning Using Genetic Algorithms. Appl. Eng. Agric. 2011, 27, 1077–1086. [Google Scholar] [CrossRef]
- Shen, M.; Wang, S.; Wang, S.; Su, Y. Simulation Study on Coverage Path Planning of Autonomous Tasks in Hilly Farmland Based on Energy Consumption Model. Math. Probl. Eng. 2020, 2020, 1–15. [Google Scholar] [CrossRef]
- Griffel, L.M.; Vazhnik, V.; Hartley, D.; Hansen, J.K.; Roni, M. Agricultural field shape descriptors as predictors of field efficiency for perennial grass harvesting: An empirical proof. Comput. Electron. Agric. 2020, 168, 105088. [Google Scholar] [CrossRef]
- Wu, C.; Chen, Z.; Wang, D.; Song, B.; Liang, Y.; Yang, L.; Bochtis, D.D. A Cloud-Based In-Field Fleet Coordination System for Multiple Operations. Energies 2020, 13, 775. [Google Scholar] [CrossRef] [Green Version]
- Zangina, U.; Buyamin, S.; Abidin, M.; Mahmud, M. Agricultural rout planning with variable rate pesticide application in a greenhouse environment. Alex. Eng. J. 2021, 60, 3007–3020. [Google Scholar] [CrossRef]
- Zhu, A.; Bian, B.; Jiang, Y.; Hu, J. Integrated Tomato Picking and Distribution Scheduling Based on Maturity. Sustainability 2020, 12, 7934. [Google Scholar] [CrossRef]
- He, P.; Li, J. A joint optimization framework for wheat harvesting and transportation considering fragmental farmlands. Inf. Process. Agric. 2021, 8, 1–14. [Google Scholar] [CrossRef]
- He, P.; Li, J. The two-echelon multi-trip vehicle routing problem with dynamic satellites for crop harvesting and transportation. Appl. Soft Comput. 2019, 77, 387–398. [Google Scholar] [CrossRef]
- Villa-Henriksen, A.; Skou-Nielsen, N.; Munkholm, L.J.; Sørensen, C.A.G.; Green, O.; Edwards, G.T.C. Infield optimized route planning in harvesting operations for risk of soil compaction reduction. Soil Use Manag. 2020. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sørensen, C.G.; Green, O. A DSS for planning of soil-sensitive field operations. Decis. Support Syst. 2012, 53, 66–75. [Google Scholar] [CrossRef]
- Hameed, I.A.; Bochtis, D.; Sørensen, C.; Vougioukas, S. An object-oriented model for simulating agricultural in-field machinery activities. Comput. Electron. Agric. 2012, 81, 24–32. [Google Scholar] [CrossRef]
- Jensen, M.F.; Bochtis, D.; Sørensen, C.G. Coverage planning for capacitated field operations, part II: Optimisation. Biosyst. Eng. 2015, 139, 149–164. [Google Scholar] [CrossRef]
- Xia, C.; Wang, L.; Chung, B.-K.; Lee, J.-M. In Situ 3D Segmentation of Individual Plant Leaves Using a RGB-D Camera for Agricultural Automation. Sensors 2015, 15, 20463–20479. [Google Scholar] [CrossRef] [PubMed]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations: Concepts and components. Biosyst. Eng. 2016, 149, 94–111. [Google Scholar] [CrossRef]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations. Part 2: Operations and systems. Biosyst. Eng. 2017, 153, 110–128. [Google Scholar] [CrossRef]









| Parameters | Values |
|---|---|
| Working width (meter) | 28 |
| Turning radius (meter) | 14 |
| Capacity (liter) | 24,000 |
| Working speed (m/s) | 1.6 |
| Non-working speed (m/s) | 3.82 |
| Target application rate (liter/m2) | 3 |
| Tolerance from target application rate (%) | 30 |
| Best Solution | <0, 25, 0, 27, 24, 0, 15, 0, 19, 12, 5, 0, 3, 0, 1, 0, 9, 0, 7, 0, 13, 0, 17, 0, 21, 0, ‘69h’, ‘70h’, ‘71h’, ‘72h’, ‘73h’, ‘74h’, 0, ‘63h’, ‘64h’, ‘65h’, ‘66h’, ‘67h’, ‘68h’, 0, ’44h’, ‘45h’,…, ’61h’, ‘62h’, 0, ’30h’, ‘31h’,…, ’42h’, ‘43h’, 0, ’15h’, ‘16h’,…, ’28h’, ‘29h’, 0, ’14h’, ‘13h’,…, ’5h’, ‘4h’, ‘3h’, 0> |
| Non-working traveled distance (meter) | 17,644.7 |
| Non-working time (minutes) | 76.98 |
| Non-Working Traveled Distance (m) | Optimized Plan | 70,345 |
| Conventional Plan | 87,650 | |
| Operational Efficiency | 19.7% |
| Parameters | Values |
|---|---|
| Tank capacity (m3) | 25 |
| Working width (m) | 7.5 |
| Machine turning radius (m) | 7.5 |
| Target application rate (liter/m2) | 1 |
| Tolerance from target application rate (%) | 30 |
| Solution | < 0, 16, 13, 20, 21, 24, 25, 28, 29, 32, 17, 0, 12, 5, 4, 1, 8, 9, ‘3h’, ‘4h’, ‘5h’, …, ‘135h’, ‘136h’, ‘137h’, 0 > |
|---|---|
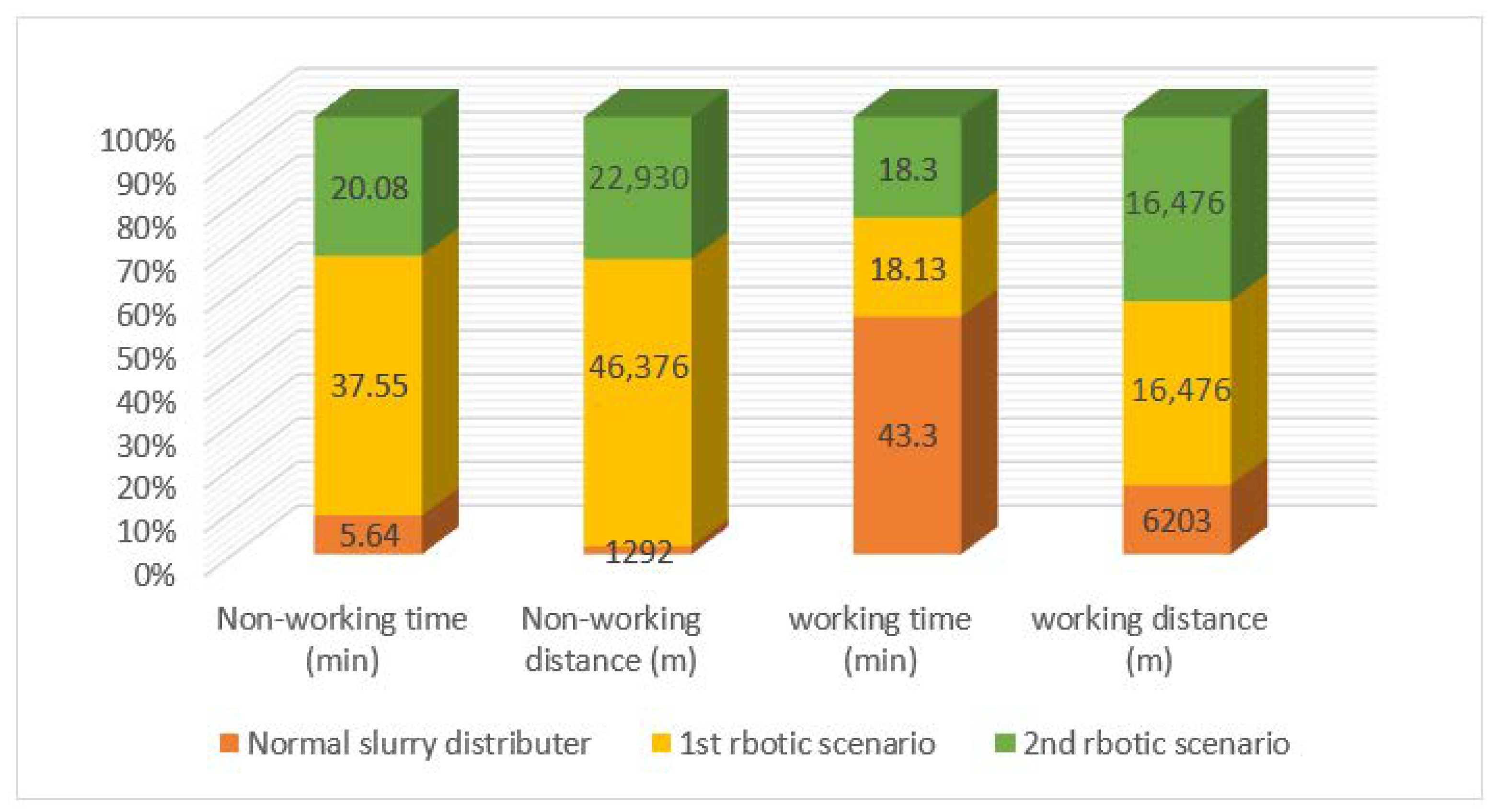
| Non-working distance (meter) | 1292 |
| Non-working time (minutes) | 5.64 |
| Working distance (meter) | 6203 |
| Working time (minutes) | 43.3 |
| Solution (1st Scenario) | <1, 106, 109, 114, 117, 122, 125, 130, 133, 138, 2, 85, 90, 93, 98, 101, 142, 145, 1, 82, 77, 74, 69, 1, 150, 153, 158, 161, 166, 169, 1, 66, 61, 58, 2, 53, 50, 45, 1, 174, 177, 182, 185, 1, 42, 37, 34, 2, 29, 26, 21, 1, 18, 13, 1, 10, 5, ‘28h’, ‘29h’,…, ‘49h’, ‘50h’, 1, 3, 2, 7, 2, 11, 2, 15, 2, 19, 2, 23, 2, 27, 2, 31, 2, 35, 2, 39, 2, 43, 2, 47, 2, 51, 2, 55, 2, 59, 2, 63, 2, 67, 2, 71, 2, 75, 2, 79, 2, 83, 2, 87, 2, 91, 2, 95, 2, 99, 2, 103, 2, 107, 2, 111, 2, 115, 2, 119, 2, 123, 2, 127, 2, 131, 2, 135, 2, 139, 2, 143, 2, 147, 2, 151, 2, 155, 2, 159, 2, 163, 2, 167, 2, 171, 2, 175, 2, 179, 2, 183, 1, ‘86h’, ‘87h’,…,’128h’, ‘129h’, 2, ‘134h’, ‘135h’,…,’154h’, ‘155h’, ‘5h’, ‘6h’,…,’26h’, ‘27h’, 1, ‘130h’, ‘131h’, ‘132h’, ‘133h’, ‘51h’, ‘52h’,…,’84h’, ‘85h’, 1> | ||
| Non-Working Distance (Meter) | Non-Working Time (Minutes) | Working Distance (Meter) | Working Time (Minutes) |
| 18,026 | 37.55 | 5475 | 18.13 |
| 14,093 | 29.35 | 5536 | 17.97 |
| 14,257 | 29.7 | 5465 | 17.49 |
| 46,376 | 37.55 | 16,476 | 18.13 |
| Solution (2nd Scenario) | <1, 106, 109, 114, 117, 122, 125, 130, 133, 138, 2, 85, 90, 93, 98, 101, 142, 145, 1, 82, 77, 74, 69, 1, 150, 153, 158, 161, 166, 169, 1, 66, 61, 58, 2, 53, 50, 45, 1, 174, 177, 182, 185, 1, 42, 37, 34, 2, 29, 26, 21, 1, 18, 13, 1, 10, 5, ‘28h’, ‘29h’,…, ‘49h’, ‘50h’, 1, 4, 2, 7, 1, 12, 2, 15, 1, 20, 2, 23, 1, 28, 2, 31, 1, 36, 2, 39, 1, 44, 2, 47, 1, 52, 2, 55, 1, 60, 2, 63, 1, 68, 2, 71, 1, 76, 2, 79, 1, 84, 2, 87, 1, 92, 2, 95, 1, 100, 2, 103, 1, 108, 2, 111, 1, 116, 2, 119, 1, 124, 2, 127, 1, 132, 2, 135, 1, 140, 2, 143, 1, 148, 2, 151, 1, 156, 2, 159, 1, 164, 2, 167, 1, 172, 2, 175, 1, 180, 2, 183, 1, ‘86h’, ‘87h’,…,’128h’, ‘129h’, 2, ‘134h’, ‘135h’,…,’154h’, ‘155h’, ‘5h’, ‘6h’,…,’26h’, ‘27h’, 1, ‘51h’, ‘52h’,…,’84h’, ‘85h’,‘130h’, ‘131h’, ‘132h’, ‘133h’, 2> | ||
| Non-Working Distance (Meter) | Non-Working Time (Minutes) | Working Distance (Meter) | Working Time (Minutes) |
| 9640 | 20.08 | 5529 | 18.3 |
| 6704 | 13.97 | 5362 | 17.61 |
| 6586 | 13.72 | 5585 | 17.67 |
| 22,930 | 20.08 | 16,476 | 18.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vahdanjoo, M.; Sorensen, C.G. Novel Route Planning Method to Improve the Operational Efficiency of Capacitated Operations. Case: Application of Organic Fertilizer. AgriEngineering 2021, 3, 458-477. https://0-doi-org.brum.beds.ac.uk/10.3390/agriengineering3030031
Vahdanjoo M, Sorensen CG. Novel Route Planning Method to Improve the Operational Efficiency of Capacitated Operations. Case: Application of Organic Fertilizer. AgriEngineering. 2021; 3(3):458-477. https://0-doi-org.brum.beds.ac.uk/10.3390/agriengineering3030031
Chicago/Turabian StyleVahdanjoo, Mahdi, and Claus G. Sorensen. 2021. "Novel Route Planning Method to Improve the Operational Efficiency of Capacitated Operations. Case: Application of Organic Fertilizer" AgriEngineering 3, no. 3: 458-477. https://0-doi-org.brum.beds.ac.uk/10.3390/agriengineering3030031