Temperature-Compensated Spread Spectrum Sound-Based Local Positioning System for Greenhouse Operations

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
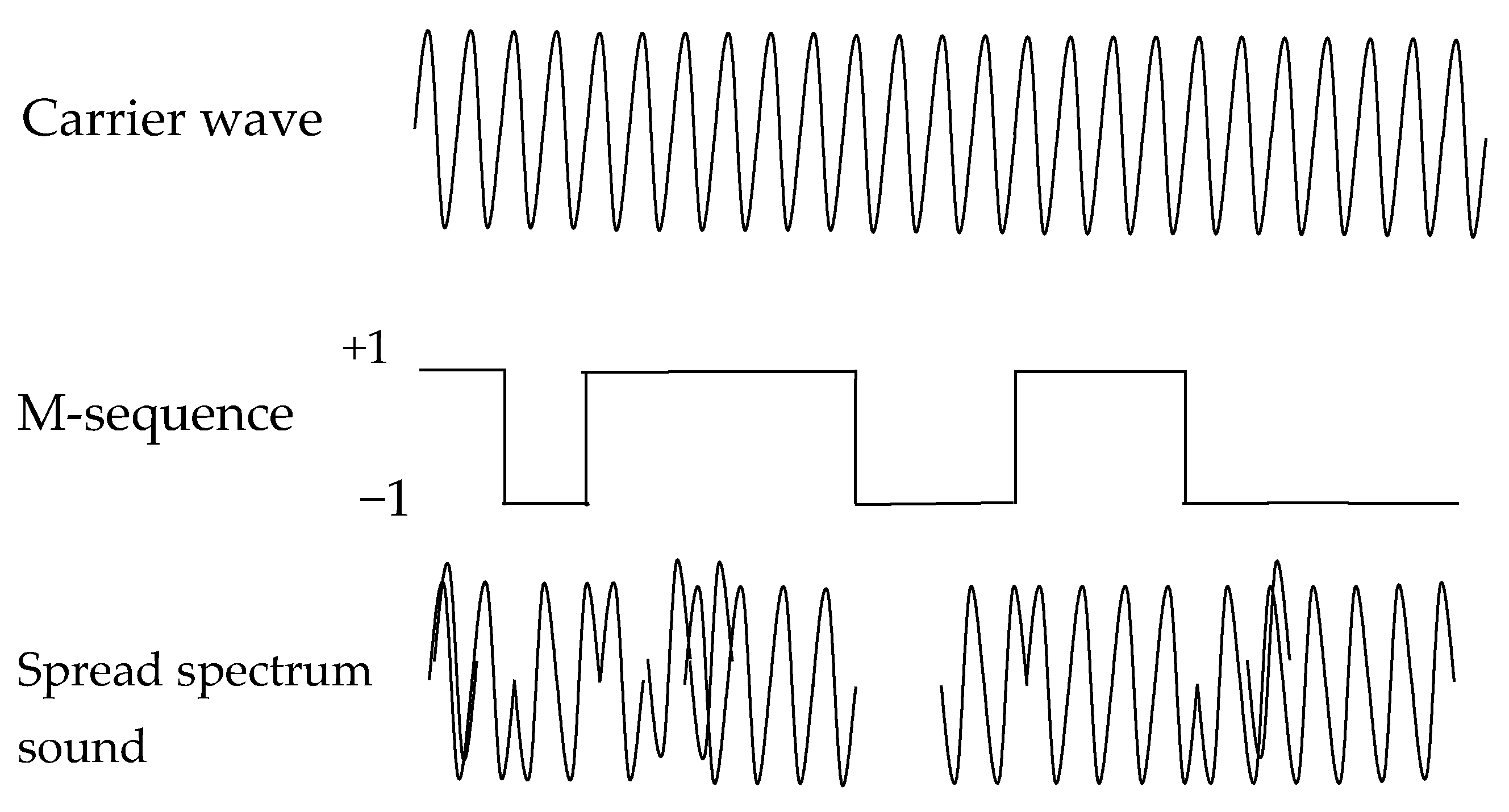
2. Spread Spectrum Sound Properties
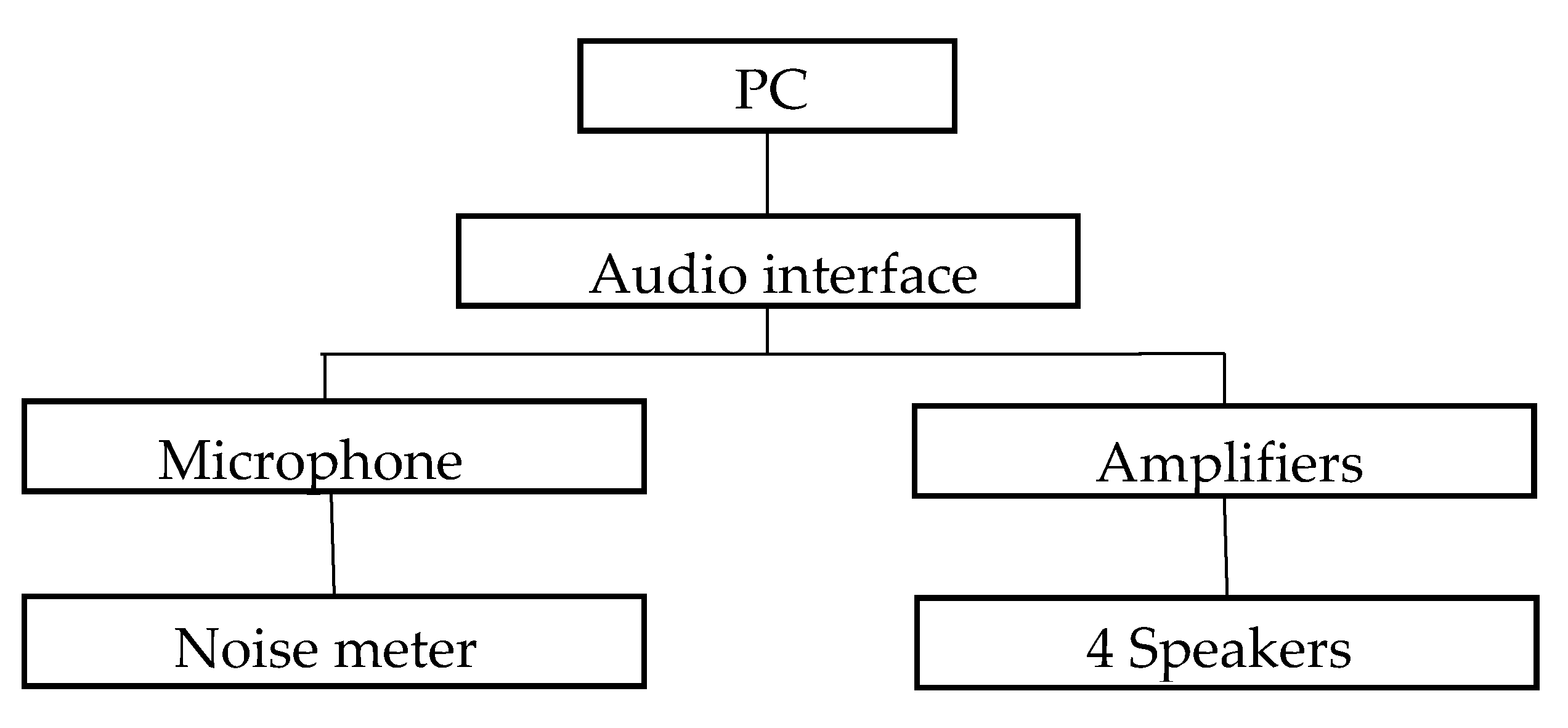
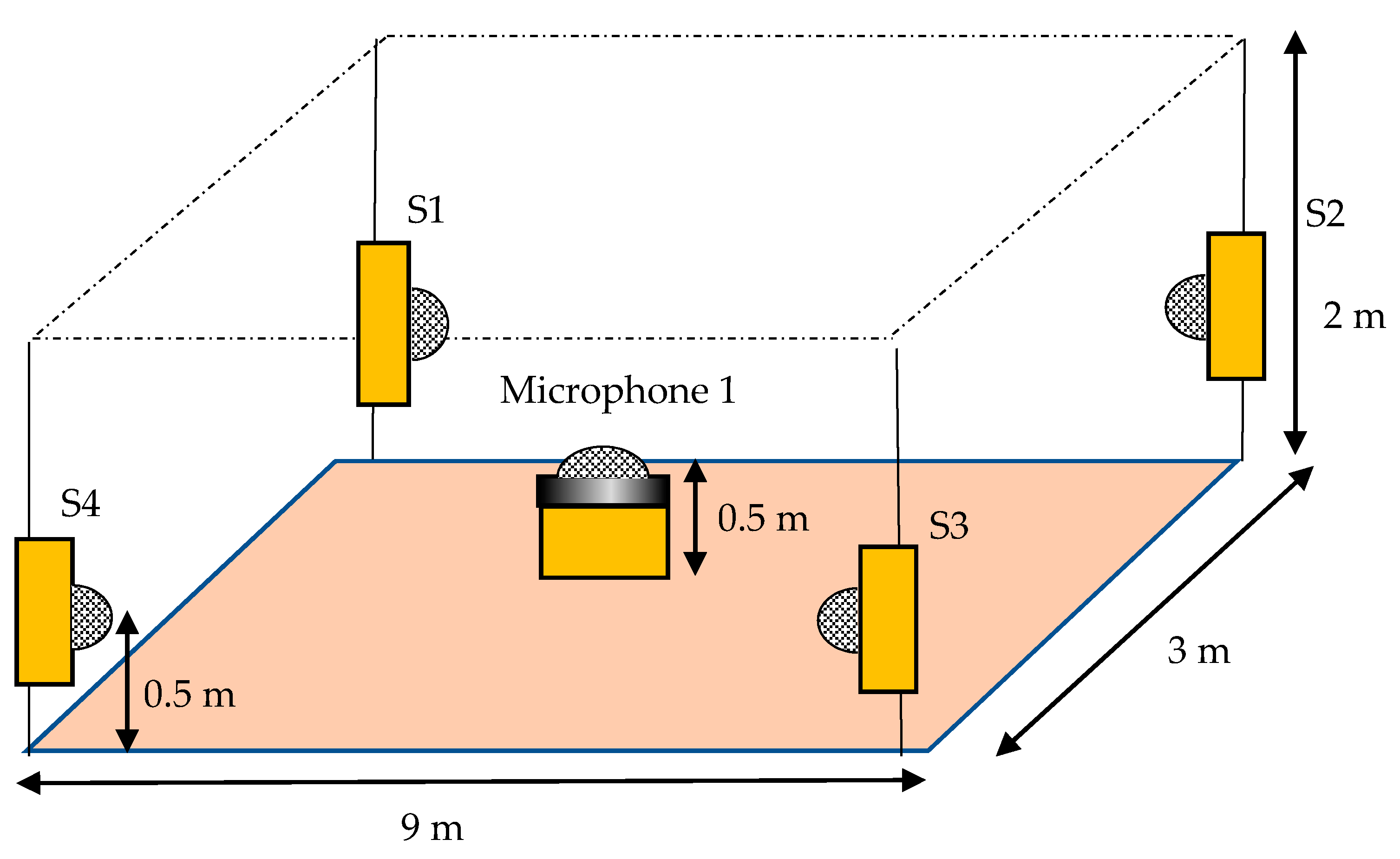
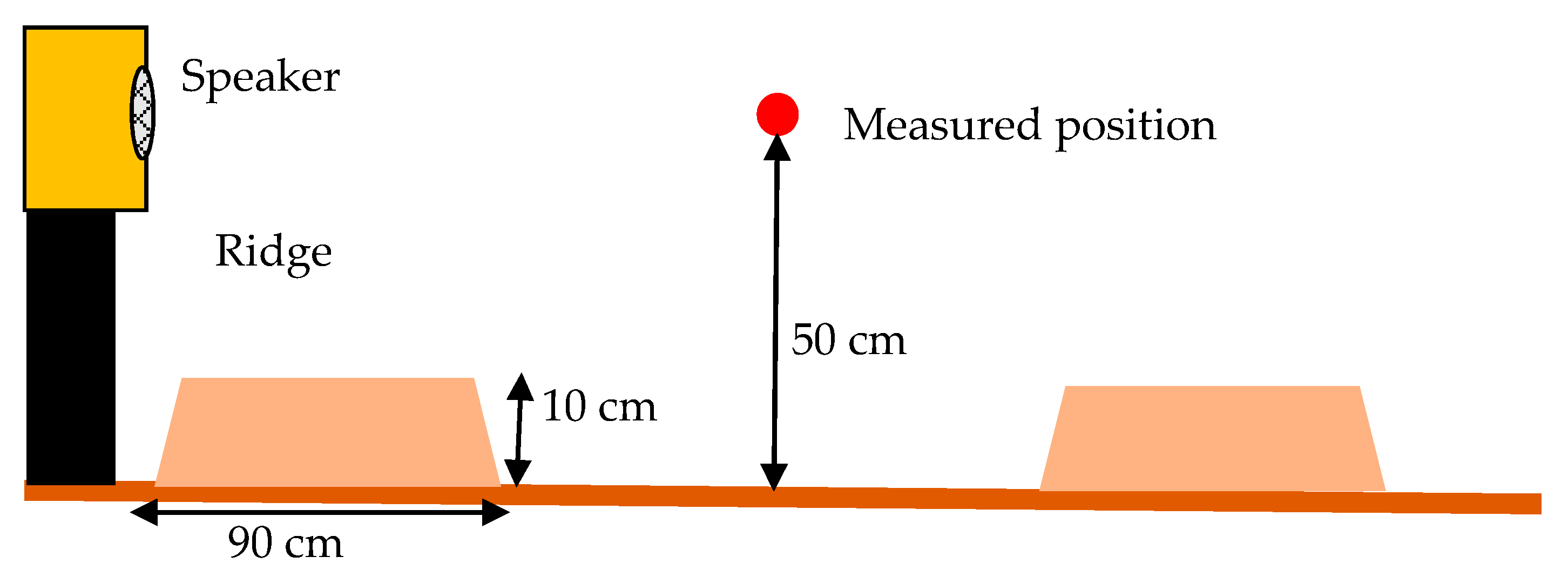
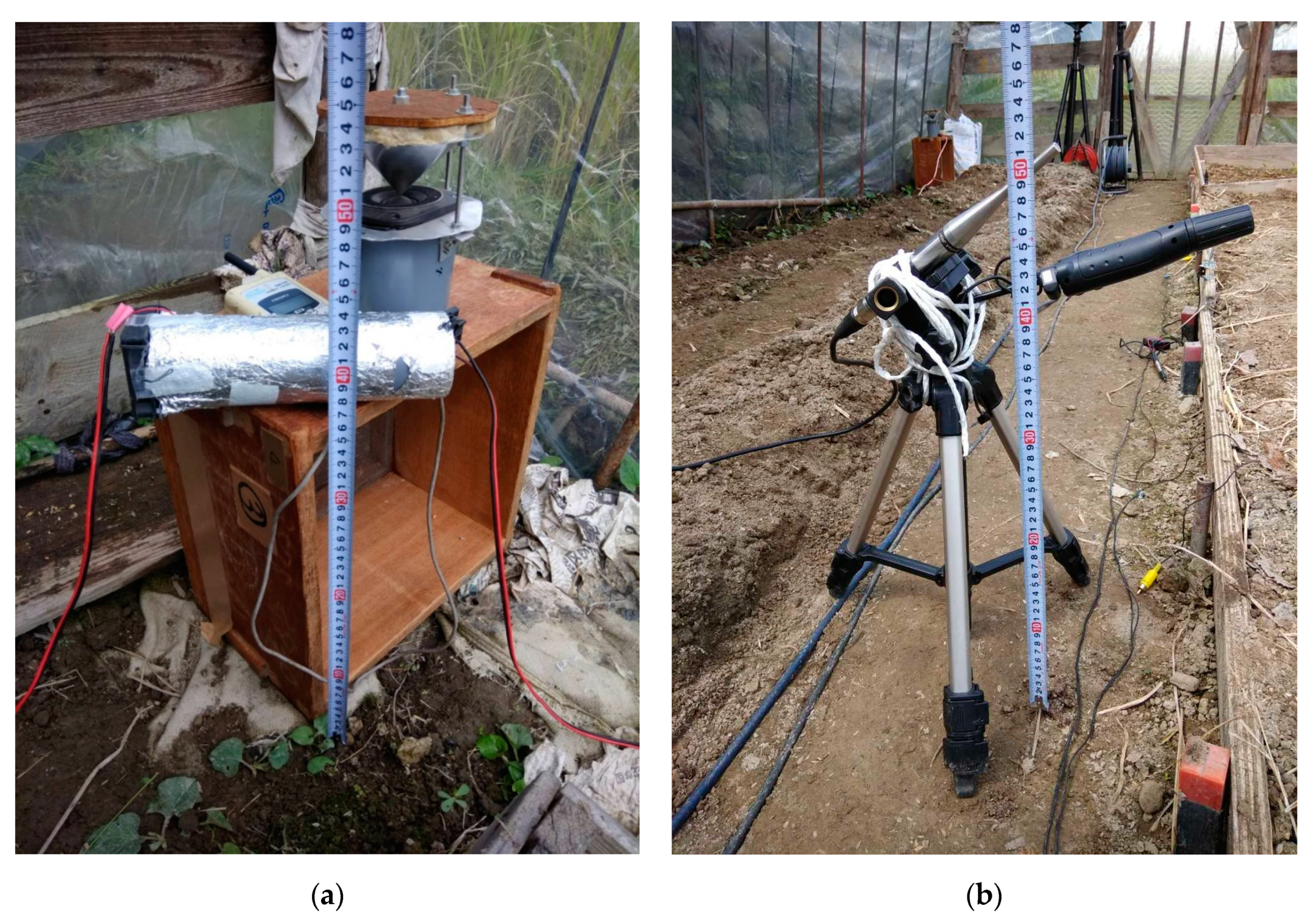
3. Materials and Methods
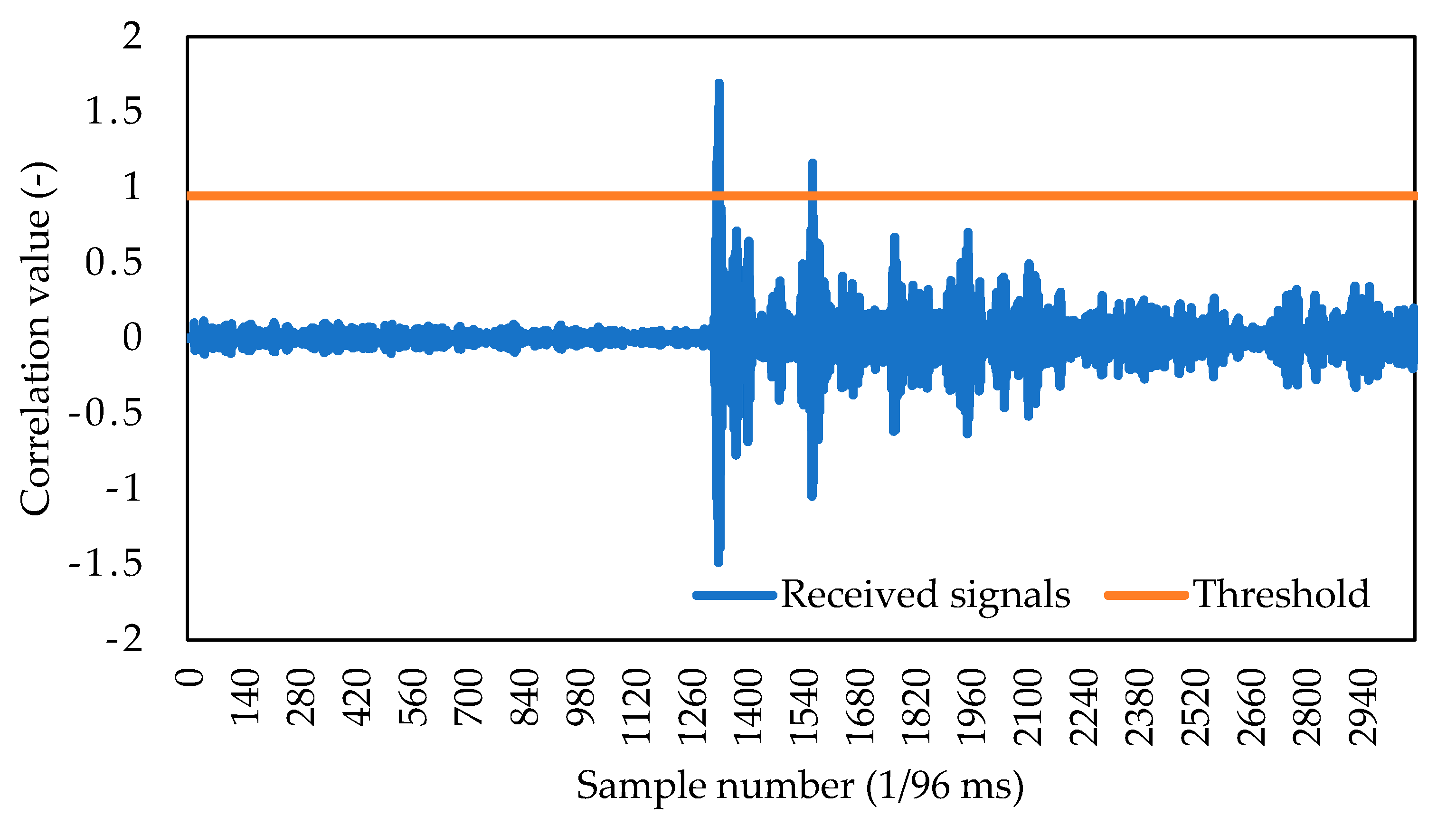
4. Results
4.1. Evaluation of the Temperature in the Greenhouse
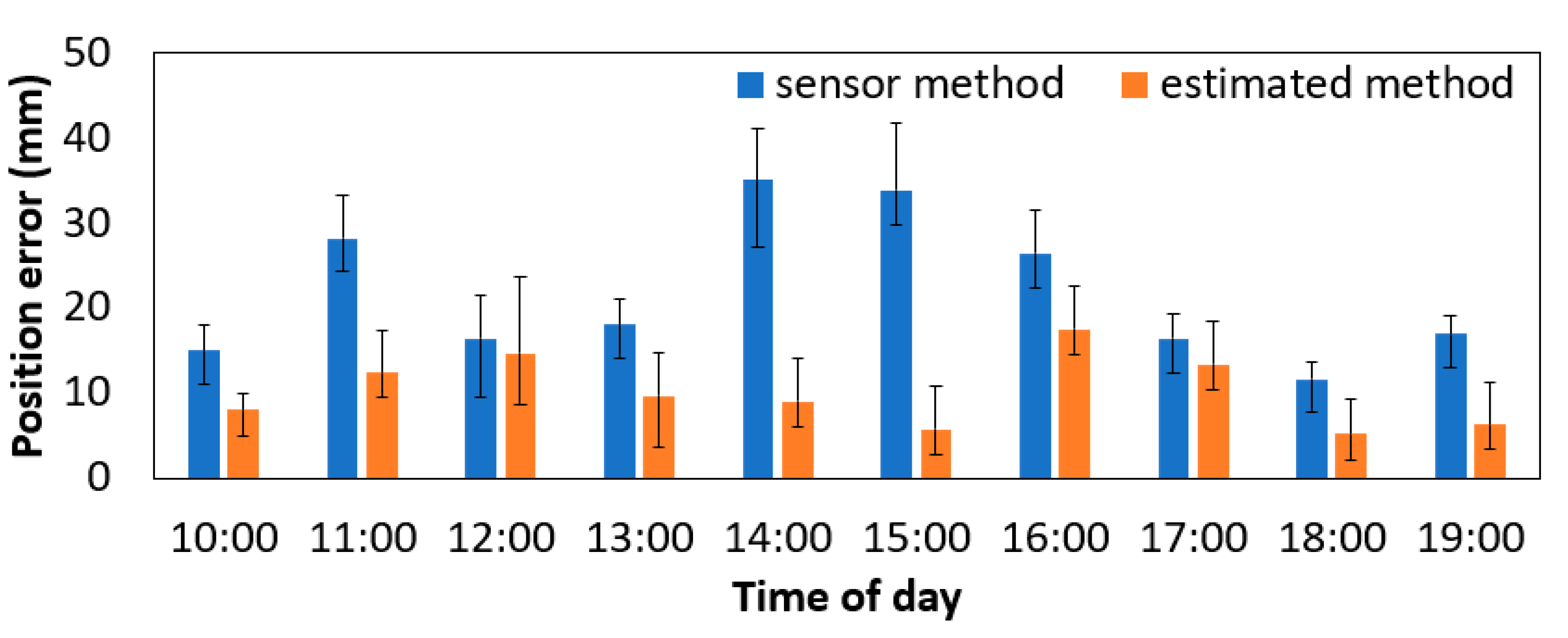
4.2. Comparison of the Conventional Temperature Sensor Method and the Estimated Sound Velocity Method
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vougioukas, S.G. Agricultural robotics. Annu. Rev. Control. Robot. Auton. Syst. 2019, 2, 365–392. [Google Scholar] [CrossRef]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations. Part 2: Operations and systems. Biosyst. Eng. 2017, 153, 110–128. [Google Scholar] [CrossRef]
- Hayashi, S.; Yamamoto, S.; Saito, S.; Ochiai, Y.; Kamata, J.; Kurita, M.; Yamamoto, K. Field Operation of a Movable Strawberry-harvesting Robot using a Travel Platform. JARQ 2014, 48, 307–316. [Google Scholar] [CrossRef] [Green Version]
- Mautz, R. Overview of current indoor positioning systems. Geod. Cartogr. 2009, 35, 18–22. [Google Scholar] [CrossRef]
- Kawamura, N.; Namikawa, K.; Fujimura, T.; Ura, M. Study on Agricultural Robot (Part 1). J. Jpn. Soc. Agric. Mach. 1984, 46, 353–358. [Google Scholar] [CrossRef]
- Spachos, P. Towards a low-cost precision viticulture system using internet of things devices. IoT 2020, 1, 2. [Google Scholar] [CrossRef] [Green Version]
- Koura, Y.; Suzuki, H.; Ogawa, K.; Kamei, Y.; Nakamura, M. GPS COMPASS: A low cost gps direction sensor of two antenna type. In Proceedings of the 14th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2001), Salt Lake City, UT, USA, 11–14 September 2001; pp. 2700–2707. [Google Scholar]
- Mercado, D.A.; Flores, G.; Castillo, P.; Escareno, J.; Lozano, R. GPS/INS/optic flow data fusion for position and velocity estimation. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013; pp. 486–491. [Google Scholar]
- Jia, L.; Xue, B.; Chen, S.; Wu, H.; Yang, X.; Zhai, J.; Zeng, Z. A high-resolution ultrasonic ranging system using laser sensing and a cross-correlation method. Appl. Sci. 2019, 9, 1483. [Google Scholar] [CrossRef] [Green Version]
- Yan, H.; Chu, J. RFID positioning algorithm based on BA optimization. In Proceedings of the 2020 5th International Conference on Computer and Communication Systems (ICCCS), Shanghai, China, 22–24 February 2020; pp. 854–858. [Google Scholar]
- Shirehjini, A.A.N.; Yassine, A.; Shirmohammadi, S. An RFID-based position and orientation measurement system for mobile objects in intelligent environments. IEEE Trans. Instrum. Meas. 2012, 61, 1664–1675. [Google Scholar] [CrossRef]
- Spachos, P.; Papapanagiotou, I.; Plataniotis, K.N. Microlocation for smart buildings in the era of the internet of things: A survey of technologies, techniques, and approaches. IEEE Signal Process. Mag. 2018, 35, 140–152. [Google Scholar] [CrossRef]
- Atri Mandal, C.V.L. Beep: 3D indoor positioning using audible sound. In Proceedings of the Second IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 3–6 January 2005; pp. 348–353. [Google Scholar]
- Khyam, M.d.O.; Ge, S.S.; Li, X.; Pickering, M.R. Highly accurate time-of-flight measurement technique based on phase-correlation for ultrasonic ranging. IEEE Sens. J. 2017, 17, 434–443. [Google Scholar] [CrossRef]
- Huang, Z.; Tsay, L.W.J.; Shiigi, T.; Zhao, X.; Nakanishi, H.; Suzuki, T.; Ogawa, Y.; Kondo, N. A noise tolerant spread spectrum sound-based local positioning system for operating a quadcopter in a greenhouse. Sensors 2020, 20, 1981. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chan, E.C.L.; Baciu, G.; Mak, S.C. Using Wi-Fi signal strength to localize in wireless sensor networks. In Proceedings of the 2009 WRI International Conference on Communications and Mobile Computing, Kunming, China, 6–8 January 2009; pp. 538–542. [Google Scholar]
- Bellone, T.; Dabove, P.; Manzino, A.M.; Taglioretti, C. Real-time monitoring for fast deformations using GNSS low-cost receivers. Geomat. Nat. Hazards Risk 2016, 7, 458–470. [Google Scholar] [CrossRef]
- De Preter, A.; Anthonis, J.; De Baerdemaeker, J. Development of a robot for harvesting strawberries. IFAC Pap. 2018, 51, 14–19. [Google Scholar] [CrossRef]
- Huang, Z.; Wai Jacky, T.L.; Zhao, X.; Shiigi, T.; Nakanishi, H.; Suzuki, T.; Naoshi, K. Noise Tolerance evaluation of spread spectrum sound-based positioning system for a quadcopter in a greenhouse. IFAC Pap. 2019, 52, 239–242. [Google Scholar] [CrossRef]
- Osada, Y.; Fujimoto, H.; Miura, S.; Sweeney, A.; Kanazawa, T.; Nakao, S.; Sakai, S.; Hildebrand, J.A.; Chadwell, C.D. Estimation and correction for the effect of sound velocity variation on GPS/Acoustic seafloor positioning: An experiment off Hawaii Island. Earth Planets Space 2003, 55, e17–e20. [Google Scholar] [CrossRef] [Green Version]
- Wenzhou, S. Analysis of the influence about uncertain sound velocity on the positioning of seafloor control points. OFOAJ 2019, 9. [Google Scholar] [CrossRef]
- Widodo, S.; Shiigi, T.; Hayashi, N.; Kikuchi, H.; Yanagida, K.; Nakatsuchi, Y.; Ogawa, Y.; Kondo, N. Moving object localization using sound-based positioning system with doppler shift compensation. Robotics 2013, 2, 36–53. [Google Scholar] [CrossRef] [Green Version]
- Ni, D.; Postolache, O.A.; Mi, C.; Zhong, M.; Wang, Y. UWB indoor positioning application based on kalman filter and 3-D TOA localization algorithm. In Proceedings of the 2019 11th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 28–30 March 2019; pp. 1–6. [Google Scholar]
- Le, T.-K.; Ono, N. Numerical formulae for TOA-based microphone and source localization. In Proceedings of the 2014 14th International Workshop on Acoustic Signal Enhancement (IWAENC), Juan-les-Pins, France, 8–11 September 2014; pp. 178–182. [Google Scholar]
- Mostafa, M.H.; Chamaani, S.; Sachs, J. Singular spectrum analysis-based algorithm for vitality monitoring using M-sequence UWB sensor. IEEE Sens. J. 2020, 20, 4787–4802. [Google Scholar] [CrossRef]
- Huang, L.; Zhang, S.; Wang, J.; Zhang, X. Classification of improved cross-correlation function to determine speaker location from microphone array. In Proceedings of the 2019 IEEE Fifth International Conference on Big Data Computing Service and Applications (BigDataService), Newark, CA, USA, 4–9 April 2019; pp. 209–214. [Google Scholar]
- Matano, T.; Tanaka, T. Inverse-GPS positioning using carrier phase. IEEJ Trans. EIS 2003, 123, 255–261. [Google Scholar] [CrossRef] [Green Version]
- Le, T.-K.; Ono, N. Reference-distance estimation approach for TDOA-based source and sensor localization. In Proceedings of the 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), South Brisbane, Australia, 19–24 April 2015; pp. 2549–2553. [Google Scholar]
- Li, G.; Tang, L.; Zhang, X.; Dong, J.; Xiao, M. Factors affecting greenhouse microclimate and its regulating techniques: A review. IOP Conf. Ser. Earth Environ. Sci. 2018, 167, 012019. [Google Scholar] [CrossRef]
- Kumar, M. Experimental study on natural convection greenhouse drying of papad. J. Energy South. Afr. 2017, 24, 37–43. [Google Scholar] [CrossRef]
- Perret, J.S.; Al-Ismaili, A.M.; Sablani, S.S. Humidification-dehumidification system in a greenhouse for sustainable crop production. In Proceedings of the Ninth International Water Technology Conference, Sharm El-Sheikh, Egypt, 17–20 March 2005; pp. 849–862. [Google Scholar]
- Yang, X.; Short, T.H.; Fox, R.D.; Bauerle, W.L. Transpiration, leaf temperature and stomatal resistance of a greenhouse cucumber crop. Agric. For. Meteorol. 1990, 51, 197–209. [Google Scholar] [CrossRef]













© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsay, L.W.J.; Shiigi, T.; Huang, Z.; Zhao, X.; Suzuki, T.; Ogawa, Y.; Kondo, N. Temperature-Compensated Spread Spectrum Sound-Based Local Positioning System for Greenhouse Operations. IoT 2020, 1, 147-160. https://0-doi-org.brum.beds.ac.uk/10.3390/iot1020010
Tsay LWJ, Shiigi T, Huang Z, Zhao X, Suzuki T, Ogawa Y, Kondo N. Temperature-Compensated Spread Spectrum Sound-Based Local Positioning System for Greenhouse Operations. IoT. 2020; 1(2):147-160. https://0-doi-org.brum.beds.ac.uk/10.3390/iot1020010
Chicago/Turabian StyleTsay, Lok Wai Jacky, Tomoo Shiigi, Zichen Huang, Xunyue Zhao, Tetsuhito Suzuki, Yuichi Ogawa, and Naoshi Kondo. 2020. "Temperature-Compensated Spread Spectrum Sound-Based Local Positioning System for Greenhouse Operations" IoT 1, no. 2: 147-160. https://0-doi-org.brum.beds.ac.uk/10.3390/iot1020010