
A Neural-Network-Based Methodology for the Evaluation of the Center of Gravity of a Motorcycle Rider

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
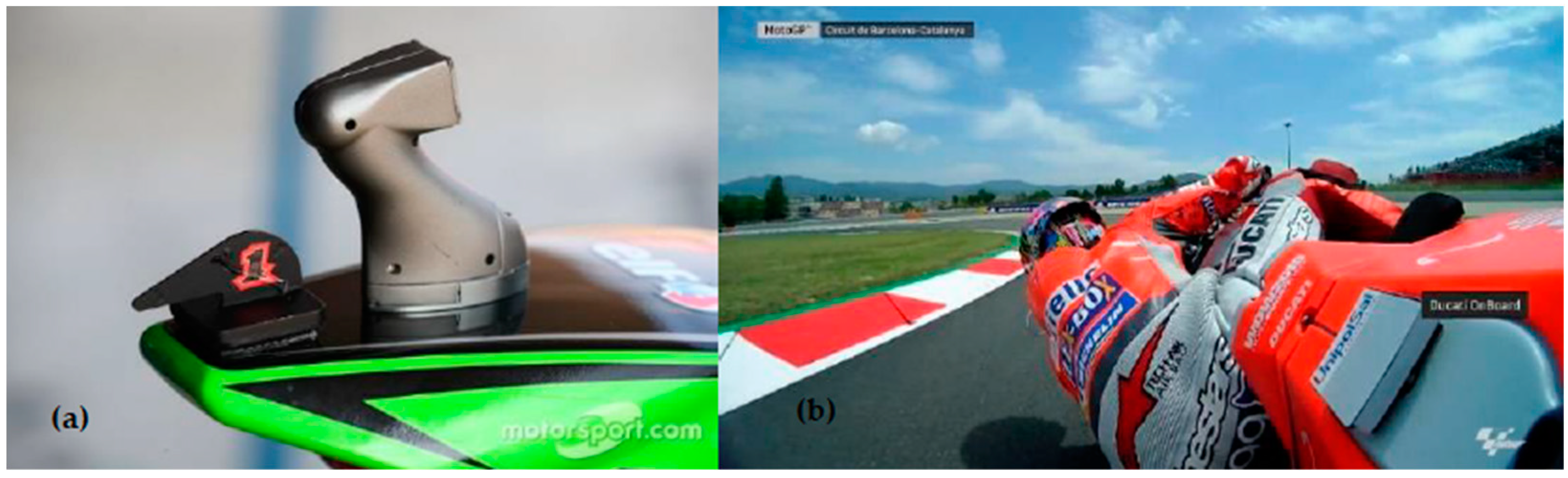
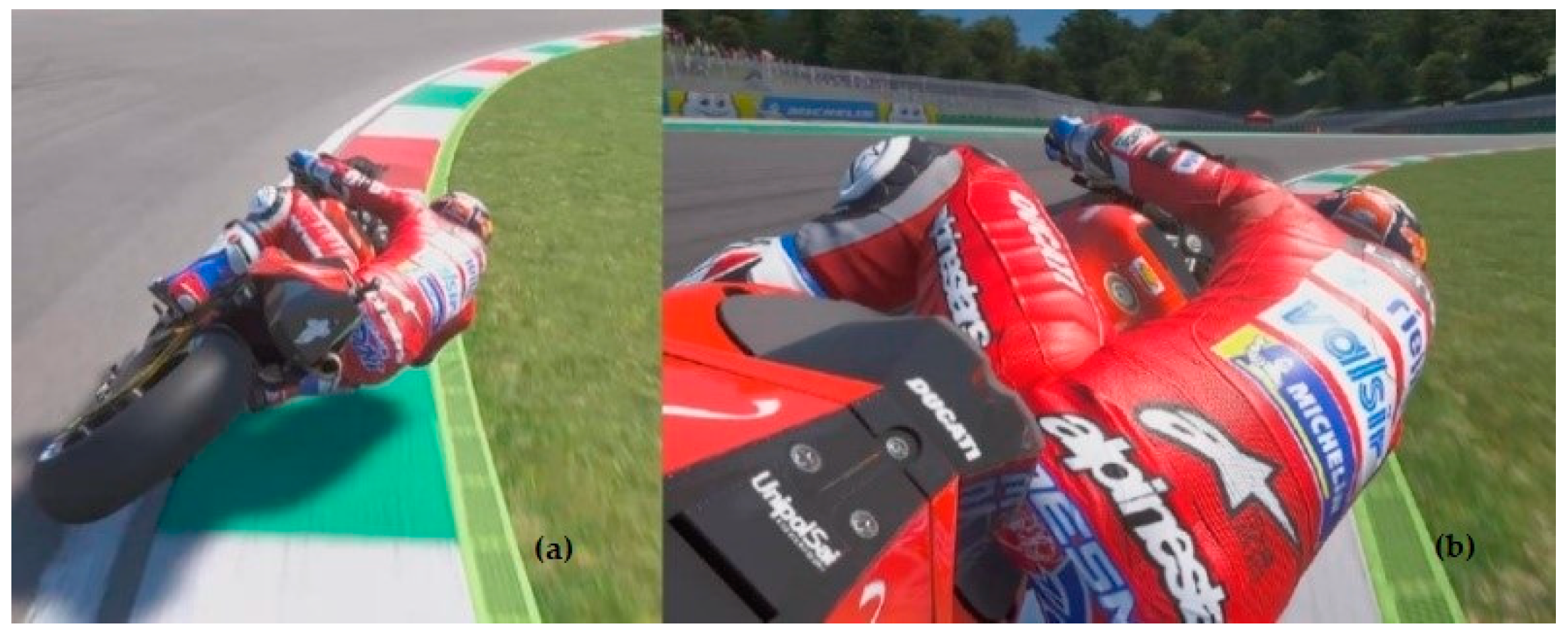
2.1. Acquisition of the Video Frames
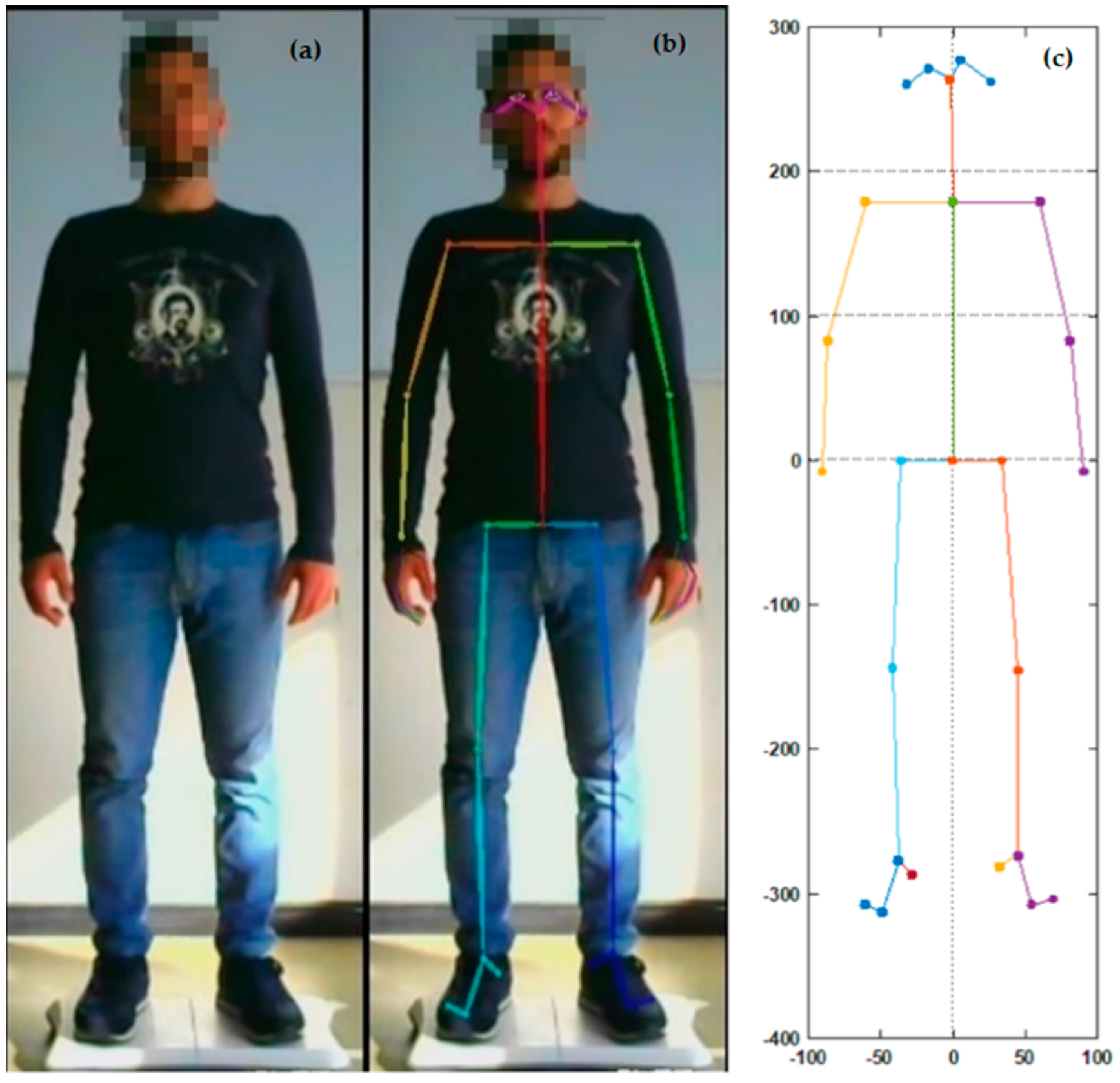
2.2. OpenPose Processing
3. Training Dataset
- x coordinates of the upper points;
- z coordinates of the upper points;
- xcoordinates of the lower points;
- zcoordinates of the lower points.
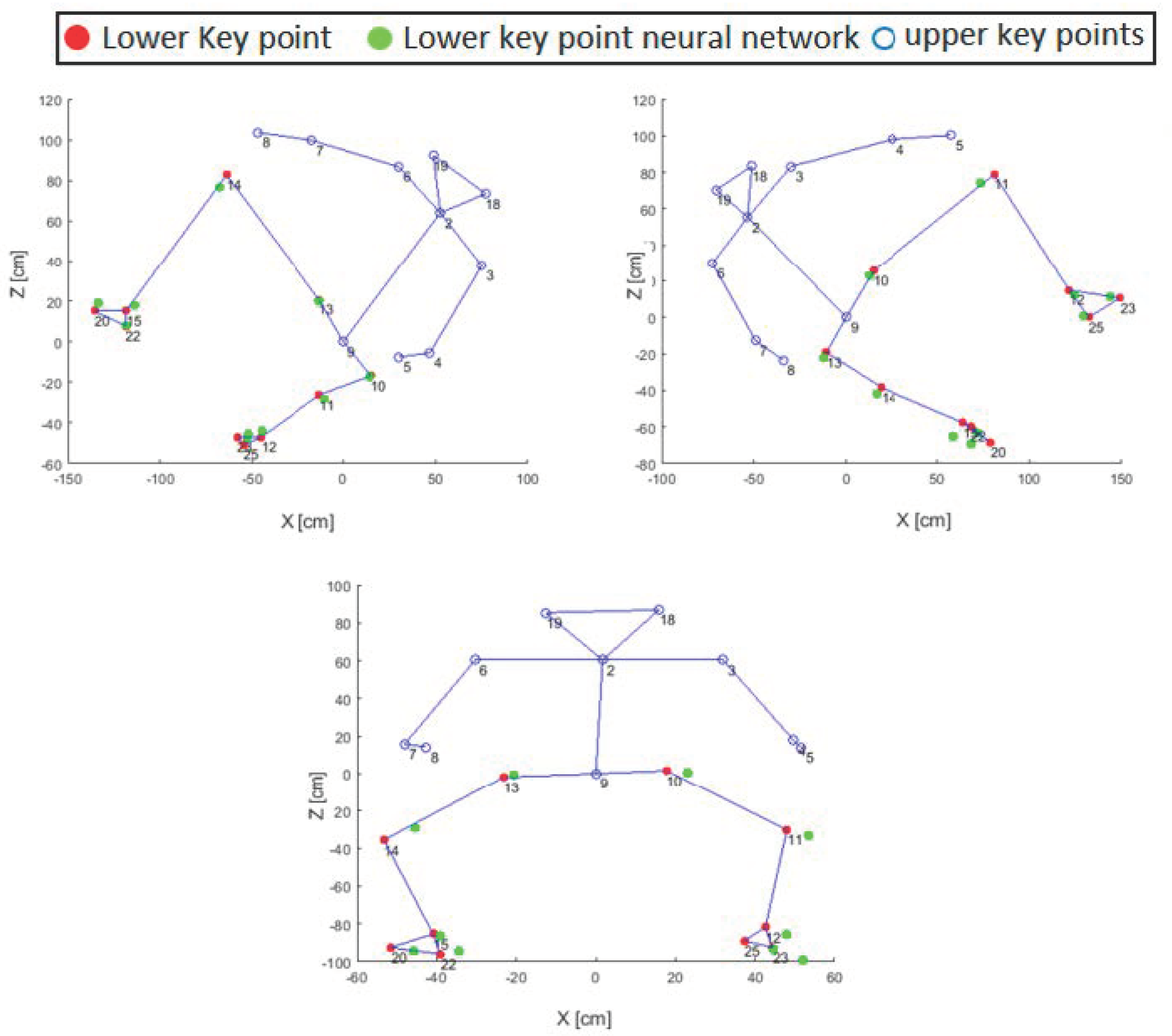
3.1. Assessment of the Centre of Gravity of the Driver’s Body
- mi is the mass of i-th element;
- M is the mass of body (including clothing).
- Capture of video frames from the MotoGP19 simulator (rear camera 2);
- Data processing with OpenPose software to evaluate the center of gravity of the individual body elements;
- Evaluation of the center of gravity of the whole body using the data in Table 1.
3.2. Application on the Acquired Data
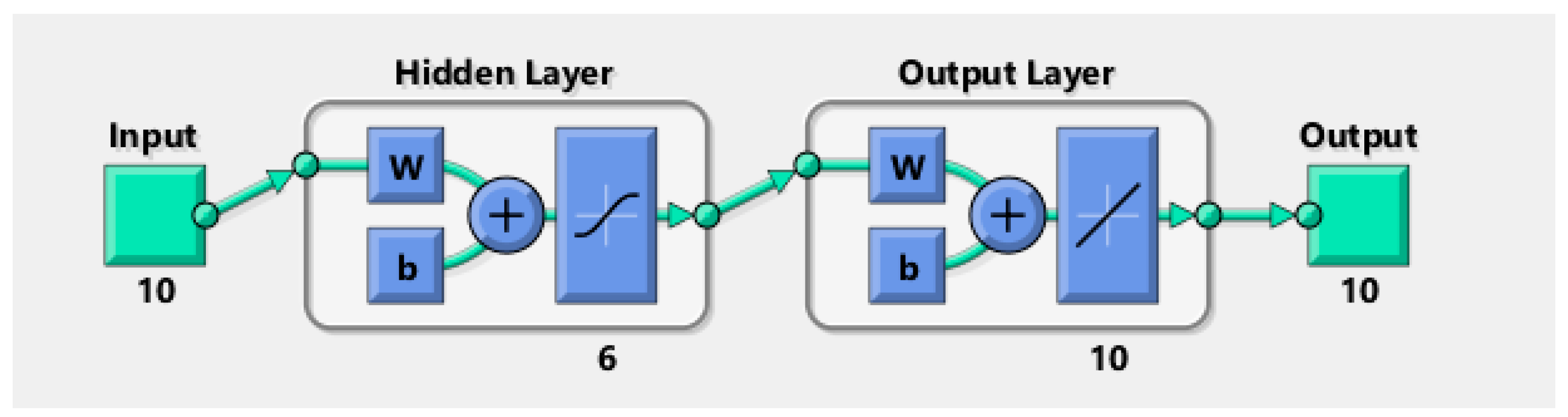
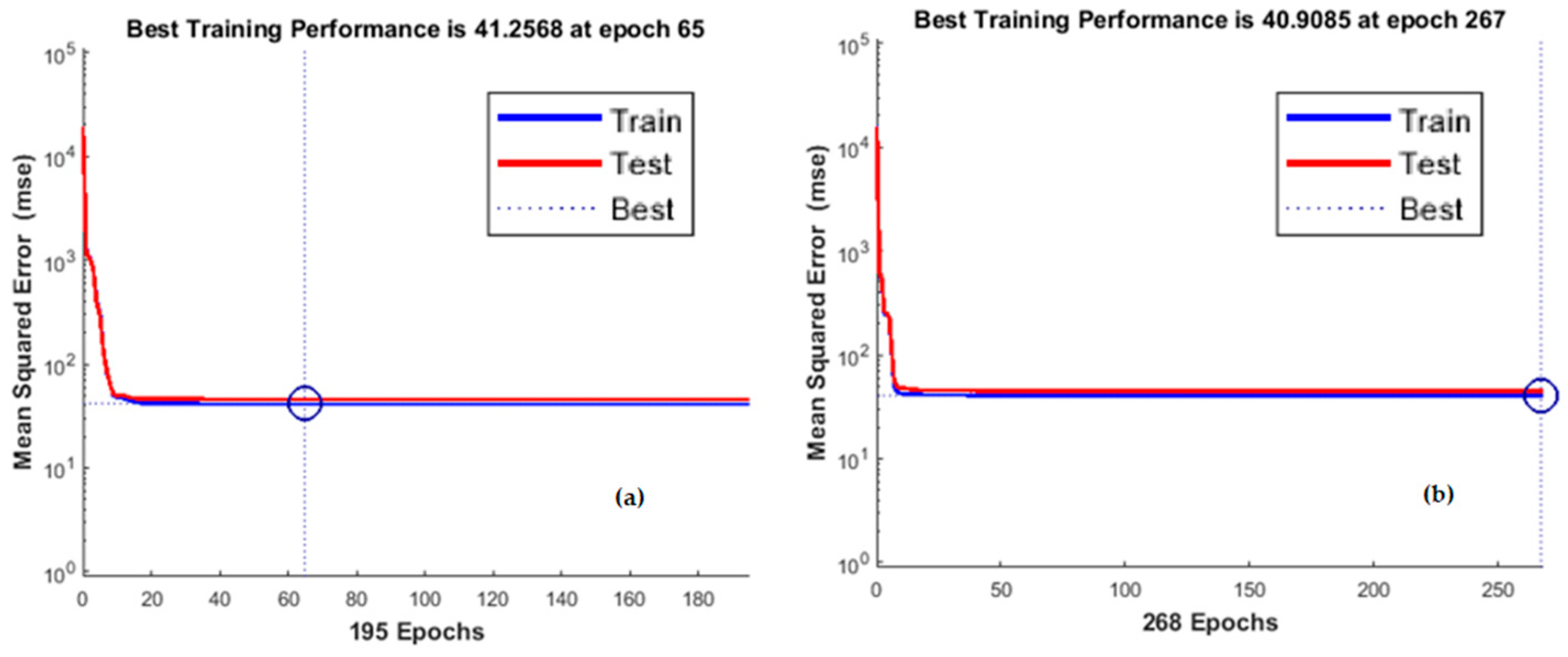
3.3. Machine Learning Technique
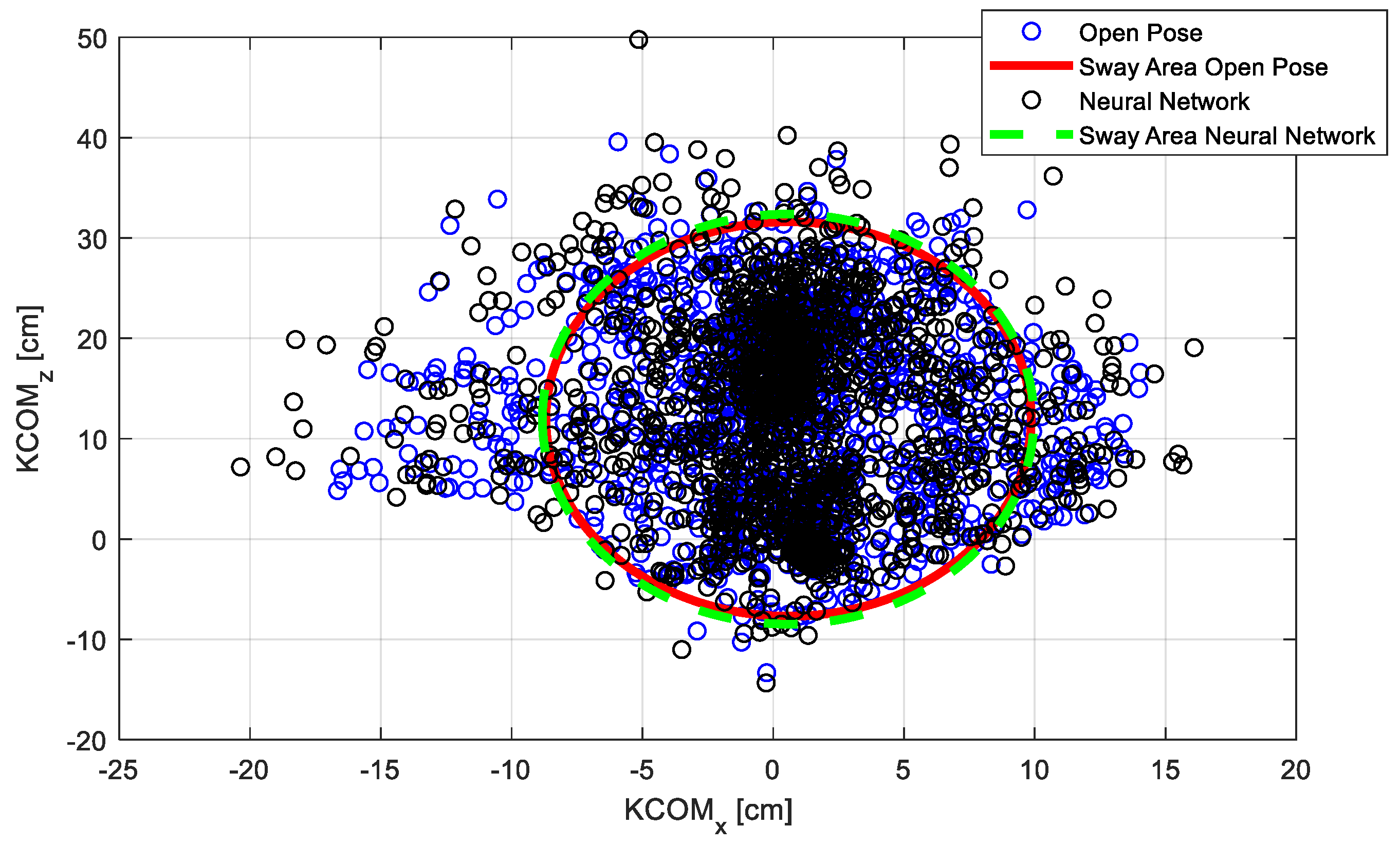
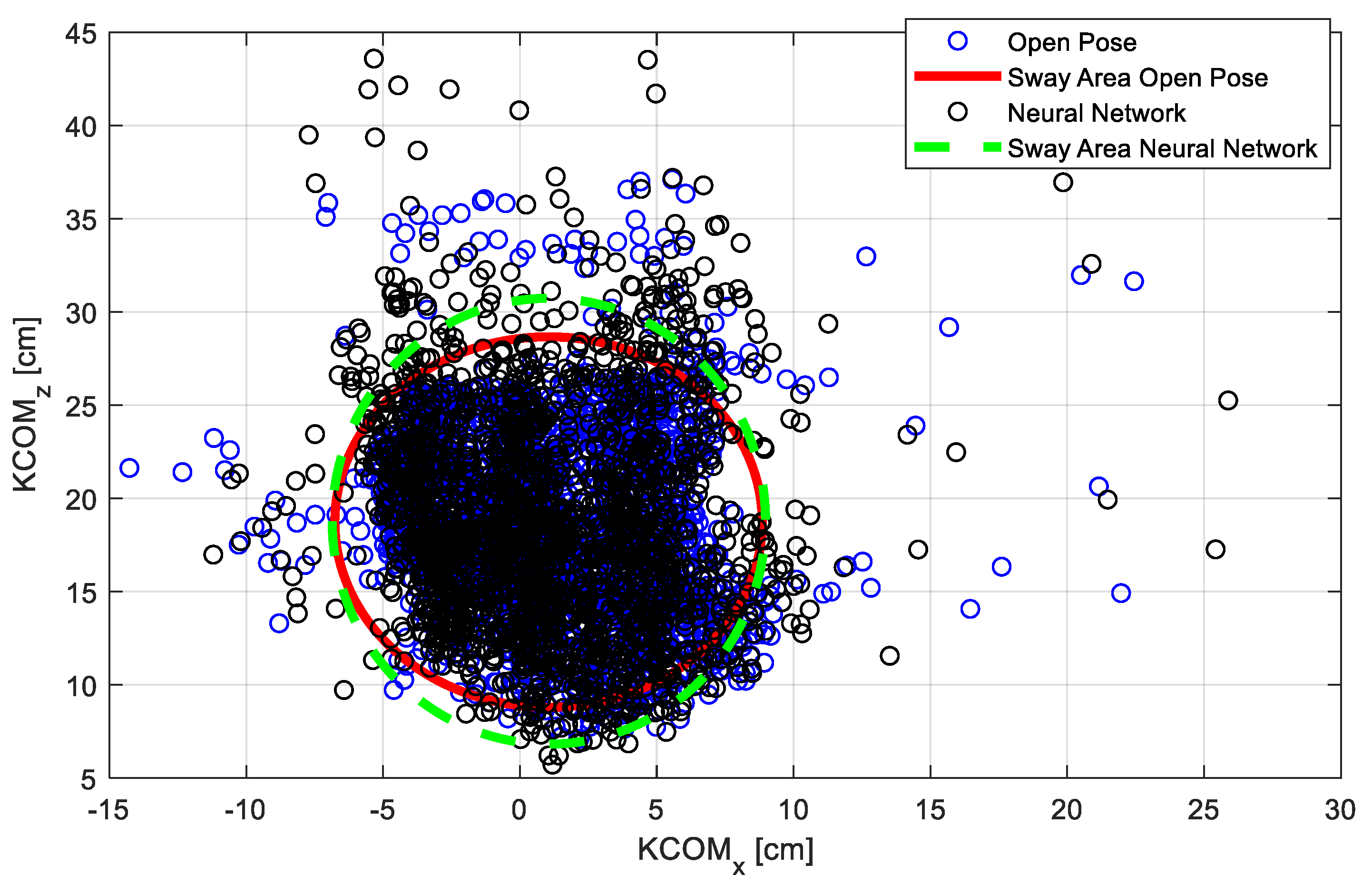
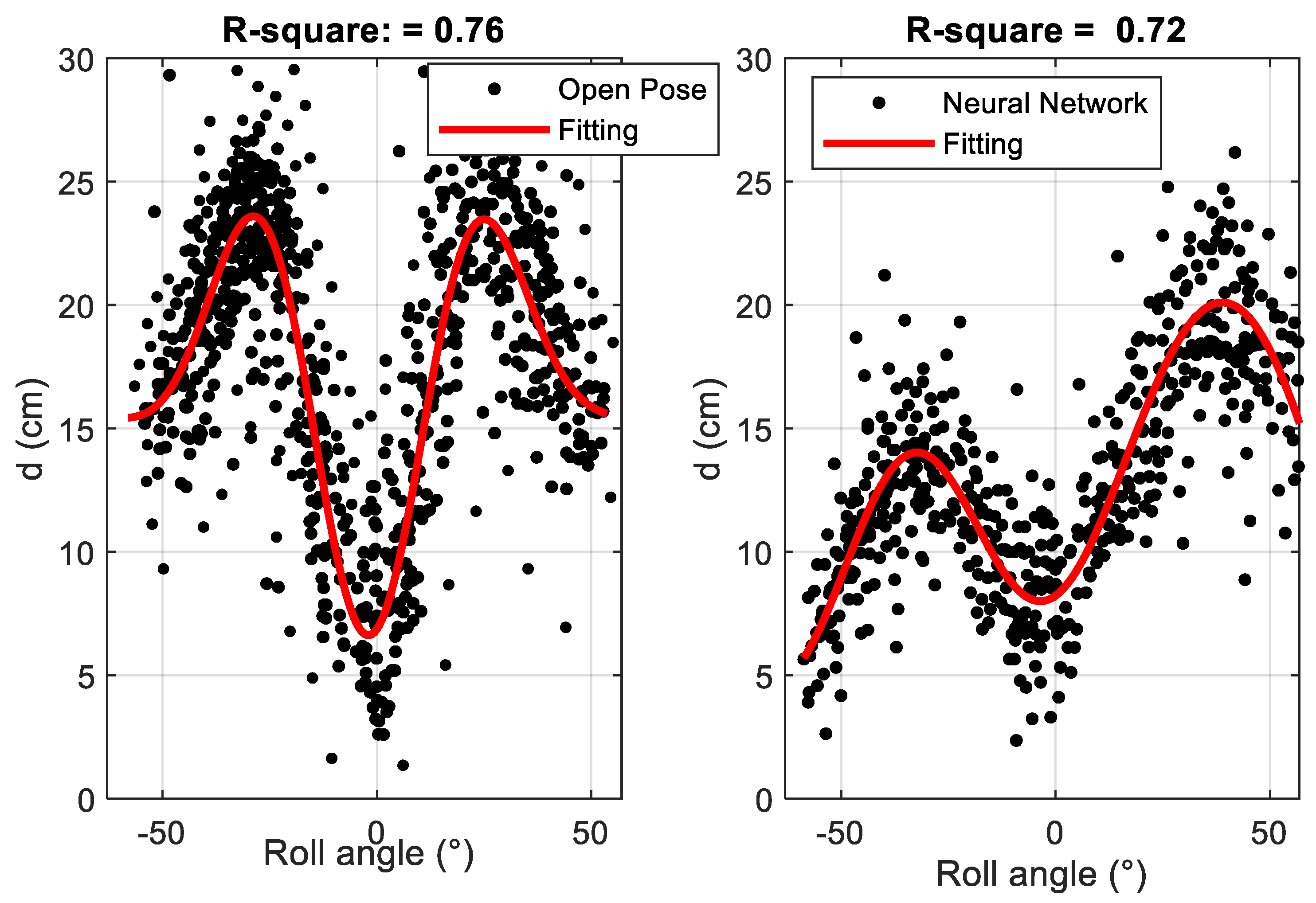
3.4. Correlation with Roll Angle
- xp,yp represent the coordinates of point P;
- m is the angular coefficient of the straight line r;
- q is the intercept on the ordinate.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kourtzi, Z.; Shiffrar, M. Dynamic representations of human body movement. Perception 1999, 28, 49–62. [Google Scholar] [CrossRef] [PubMed]
- Kanda, T.; Ishiguro, H.; Imai, M.; Ono, T. Body movement analysis of human-robot interaction. IJCAI 2003, 3, 177–182. [Google Scholar]
- Panjan, A.; Sarabon, N. Review of Methods for the Evaluation of Human Body Balance. Sport Sci. Rev. 2012, 19, 131. [Google Scholar] [CrossRef] [Green Version]
- Catena, R.D.; Chen, S.H.; Chou, L.S. Does the anthropometric model influence whole-body center of mass calculations in gait? J. Biomech. 2017, 59, 23–28. [Google Scholar] [CrossRef] [PubMed]
- Cheli, F.; Mazzoleni, P.; Pezzola, M.; Ruspini, E.; Zappa, E. Vision-based measuring system for rider’s pose estimation during motorcycle riding. Mech. Syst. Signal Process. 2013, 38, 399–410. [Google Scholar] [CrossRef]
- Cimolin, V.; Galli, M. Summary measures for clinical gait analysis: A literature review. Gait Posture 2014, 39, 1005–1010. [Google Scholar] [CrossRef]
- Durkin, J.L.; Dowling, J.J.; Andrews, D.M. The measurement of body segment inertial parameters using dual energy X-ray absorptiometry. J. Biomech. 2002, 35, 1575–1580. [Google Scholar] [CrossRef]
- Munoz, F.; Rougier, P.R. Estimation of centre of gravity movements in sitting posture: Application to trunk backward tilt. J. Biomech. 2011, 44, 1771–1775. [Google Scholar] [CrossRef]
- Jaffrey, M.A. Estimating Centre of Mass Trajectory and Subject-Specific Body Segment Parameters Using Optimisation Approaches; Victoria University: Melbourne, Australia, 2008; pp. 1–389. [Google Scholar]
- Mündermann, L.; Corazza, S.; Andriacchi, T.P. The evolution of methods for the capture of human movement leading to markerless motion capture for biomechanical applications. J. Neuro Eng. Rehabil. 2006, 3, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Hasler, N.; Rosenhahn, B.; Thormählen, T.; Wand, M.; Gall, J.; Seidel, H.P. Markerless motion capture with unsynchronized moving cameras. IEEE Conf. Comput. Vis. Pattern Recognit. 2009, 224–231. [Google Scholar] [CrossRef]
- Bakhtiari, A.; Bahrami, F.; Araabi, B.N. Real Time Estimation and Tracking of Human Body Center of Mass Using 2D Video Imaging. In Proceedings of the 1st Middle East Conference on Biomedical Engineering 2011, Sharjah, United Arab Emirates, 21–24 February 2011. [Google Scholar] [CrossRef]
- Cronin, N.J.; Rantalainen, T.; Ahtiainen, J.P.; Hynynen, E.; Waller, B. Markerless 2D kinematic analysis of underwater running: A deep learning approach. J. Biomech. 2019, 87, 75–82. [Google Scholar] [CrossRef]
- Cao, Z.; Simon, T.; Wei, S.E.; Sheikh, Y. Realtime Multi-Person 2D Pose Estimation Using Part Affinity Fields. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, 21–26 July 2017; pp. 1302–1310. [Google Scholar] [CrossRef] [Green Version]
- D’Andrea, D.; Cucinotta, F.; Farroni, F.; Risitano, G.; Santonocito, D.; Scappaticci, L. Development of Machine Learning Algorithms for the Determination of the Centre of Mass. Symmetry 2021, 13, 401. [Google Scholar] [CrossRef]
- Rice, R.S. Rider skill influences on motorcycle maneuvering. SAE Trans. 1978. [Google Scholar] [CrossRef]
- Liu, T.S.; Wu, J.C. A Model for a Rider-Motorcycle System Using Fuzzy Control. IEEE Trans. Syst. Man Cybern. 1993, 23, 267–276. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Kurillo, G.; Ofli, F.; Bajcsy, R. Evaluation of Pose Tracking Accuracy in the First and Second Generations of Microsoft Kinect. In Proceedings of the 2015 International Conference on Healthcare Informatics, Dallas, TX, USA, 21–23 October 2015. [Google Scholar] [CrossRef] [Green Version]
- Kirk, A.G.; O’Brien, J.F.; Forsyth, D.A. Skeletal Parameter Estimation from Optical Motion Capture Data. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005. [Google Scholar] [CrossRef]
- Zordan, V.B.; van der Horst, N.C. Mapping Optical Motion Capture Data to Skeletal Motion Using a Physical Model. In Proceedings of the 2003 ACM SIGGRAPH/Eurographics Symposium on Computer Animation, San Diego, CA, USA, 26–27 July 2003. [Google Scholar]
- Cossalter, V.; Lot, R.; Massaro, M. Motorcycle Dynamics. In Modelling, Simulation and Control of Two-Wheeled Vehicles; Wiley & Sons: London, UK, 2014. [Google Scholar]
- Boniolo, I.; Savaresi, S.M.; Tanelli, M. Roll angle estimation in two-wheeled vehicles. IET Control Theory Appl. 2009, 3, 20–32. [Google Scholar] [CrossRef]
- Schlipsing, M.; Schepanek, J.; Salmen, J. Video-Based Roll Angle Estimation for Two-Wheeled Vehicles. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011. [Google Scholar] [CrossRef]
- Farroni, F.; Mancinelli, N.; Timpone, F. A real-time thermal model for the analysis of tire/road interaction in motorcycle applications. Appl. Sci. 2020, 10, 1604. [Google Scholar] [CrossRef] [Green Version]
- Czart, W.R.; Robaszkiewicz, S. Openpose. Acta Phys. Pol. A 2004. [Google Scholar] [CrossRef]
- Martinez, G.H. Single-Network Whole-Body Pose Estimation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 28 October 2019. [Google Scholar] [CrossRef] [Green Version]
- Osokin, D. Real-time 2D multi-person pose estimation on CPU: Lightweight OpenPose. arXiv 2018, arXiv:1811. [Google Scholar] [CrossRef]
- Frosali, G.; Minguzzi, E. Meccanica Razionale per l’Ingegneria; Esculapio: Lucca, Italy, 2015. [Google Scholar]
- Yoganandan, N.; Pintar, F.A.; Zhang, J.; Baisden, J.L. Physical properties of the human head: Mass, center of gravity and moment of inertia. J. Biomech. 2009, 42, 1177–1192. [Google Scholar] [CrossRef]
- Zatsiorsky, V.M.; King, D.L. An algorithm for determining gravity line location from posturographic recordings. J. Biomech. 1997, 31, 161–164. [Google Scholar] [CrossRef]
- de Leva, P. Adjustments to zatsiorsky-seluyanov’s segment inertia parameters. J. Biomech. 1996, 29, 1223–1230. [Google Scholar] [CrossRef]
- Bova, M.; Massaro, M.; Petrone, N. A three-dimensional parametric biomechanical rider model for multibody applications. Appl. Sci. 2020, 10, 4509. [Google Scholar] [CrossRef]
- Demuth, H.; Beale, M. Neural Network Toolbox—For Use with MATLAB. MathWorks 2002. [Google Scholar] [CrossRef]
- Pan, J.; Sayrol, E.; Giro, I.; Nieto, X.; McGuinness, K.; O’connor, N.E. Shallow and Deep Convolutional Networks for Saliency Prediction. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 30 June 2016. [Google Scholar] [CrossRef] [Green Version]
- Schubert, P.; Kirchner, M. Ellipse area calculations and their applicability in posturography. Gait Posture 2014, 39, 518–522. [Google Scholar] [CrossRef]
- Sforza, A.; Lenzo, B.; Timpone, F. A state-of-the-art review on torque distribution strategies aimed at enhancing energy efficiency for fully electric vehicles with independently actuated drivetrains. Int. J. Mech. Control 2019, 20, 3–15. [Google Scholar]
- Sharifzadeh, M.; Farnam, A.; Timpone, F.; Senatore, A. Stabilizing a Vehicle Platoon with the Unidirectional Distributed Adaptive Sliding Mode Control. Int. Conf. Mechatron. Technol. ICMT 2019. [Google Scholar] [CrossRef]
- Pleß, R.; Will, S.; Guth, S.; Hofmann, M.; Winner, H. Approach to a Holistic Rider Input Determination for a Dynamic Motorcycle Riding Simulator. In Proceedings of the Bicycle and Motorcycle Dynamics Conference, Milwaukee, WI, USA, 21–23 September 2016. [Google Scholar]
- Cossalter, V.; Doria, A.; Fabris, D.; Maso, M. Measurement and identification of the vibration characteristics of motorcycle riders. In Proceedings of the Noise and Vibration Engineering: Proceedings of ISMA 2006, Leuven, Belgium, 18–20 September 2006. [Google Scholar]
- Nagasaka, K.; Ichikawa, K.; Yamasaki, A.; Ishii, H. Development of a Riding Simulator for Motorcycles; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Segment | Mass (% Mass) | CM (% Length) | Sagittal k (% Length) | Transverse k (% Length) | Longitudinal k (% Length) | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Female | Male | Female | Male | Female | Male | Female | Male | Female | Male | |
| Head | 6.68 | 6.94 | 58.94 | 59.76 | 30.1 | 33.2 | 32.7 | 34.5 | 28.8 | 28.6 |
| Trunk | 42.57 | 43.46 | 41.51 | 44.86 | 34.6 | 36 | 33.2 | 33.3 | 16.2 | 18.1 |
| Upper Trunk | 15.45 | 15.96 | 20.77 | 29.99 | 60 | 60.57 | 41.1 | 38.7 | 58.6 | 55.9 |
| Mid Trunk | 14.65 | 16.33 | 45.12 | 45.02 | 43.3 | 48.2 | 35.4 | 38.3 | 41.5 | 46.8 |
| Lower Trunk | 12.47 | 11.17 | 49.2 | 61.15 | 43.3 | 61.5 | 40.2 | 55.1 | 44.4 | 58.7 |
| Upper Arm | 2.55 | 2.71 | 57.54 | 57.72 | 27.8 | 28.5 | 26 | 26.9 | 14.8 | 15.8 |
| Forearm | 1.38 | 1.62 | 45.59 | 45.74 | 26.2 | 27.7 | 25.8 | 26.6 | 9.45 | 12.15 |
| Hand | 0.56 | 0.61 | 74.74 | 79 | 35.4 | 45.2 | 32.7 | 36.9 | 23.4 | 29 |
| Thigh | 14.78 | 14.16 | 36.12 | 40.95 | 36.9 | 32.9 | 36.4 | 32.9 | 16.2 | 14.9 |
| Shank | 4.81 | 4.33 | 44.16 | 44.59 | 27.1 | 25.4 | 26.8 | 24.2 | 9.3 | 10.3 |
| Foot | 1.29 | 1.37 | 40.14 | 44.15 | 29.9 | 25.7 | 27.9 | 24.5 | 13.9 | 12.4 |
| Standard Deviation [cm] | ||
|---|---|---|
| X | Z | |
| OpenPose | 5.43 | 8.19 |
| Neural Network | 5.01 | 9.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carputo, F.; D’Andrea, D.; Risitano, G.; Sakhnevych, A.; Santonocito, D.; Farroni, F. A Neural-Network-Based Methodology for the Evaluation of the Center of Gravity of a Motorcycle Rider. Vehicles 2021, 3, 377-389. https://0-doi-org.brum.beds.ac.uk/10.3390/vehicles3030023
Carputo F, D’Andrea D, Risitano G, Sakhnevych A, Santonocito D, Farroni F. A Neural-Network-Based Methodology for the Evaluation of the Center of Gravity of a Motorcycle Rider. Vehicles. 2021; 3(3):377-389. https://0-doi-org.brum.beds.ac.uk/10.3390/vehicles3030023
Chicago/Turabian StyleCarputo, Francesco, Danilo D’Andrea, Giacomo Risitano, Aleksandr Sakhnevych, Dario Santonocito, and Flavio Farroni. 2021. "A Neural-Network-Based Methodology for the Evaluation of the Center of Gravity of a Motorcycle Rider" Vehicles 3, no. 3: 377-389. https://0-doi-org.brum.beds.ac.uk/10.3390/vehicles3030023