Ship Handling in Unprotected Waters: A Review of New Technologies in Escort Tugs to Improve Safety


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Achieving the necessary high stability to withstand the overturning forces produced at yaw or drift angles (angle between the centerline of the tug and the centerline of the assisted ship) [8];
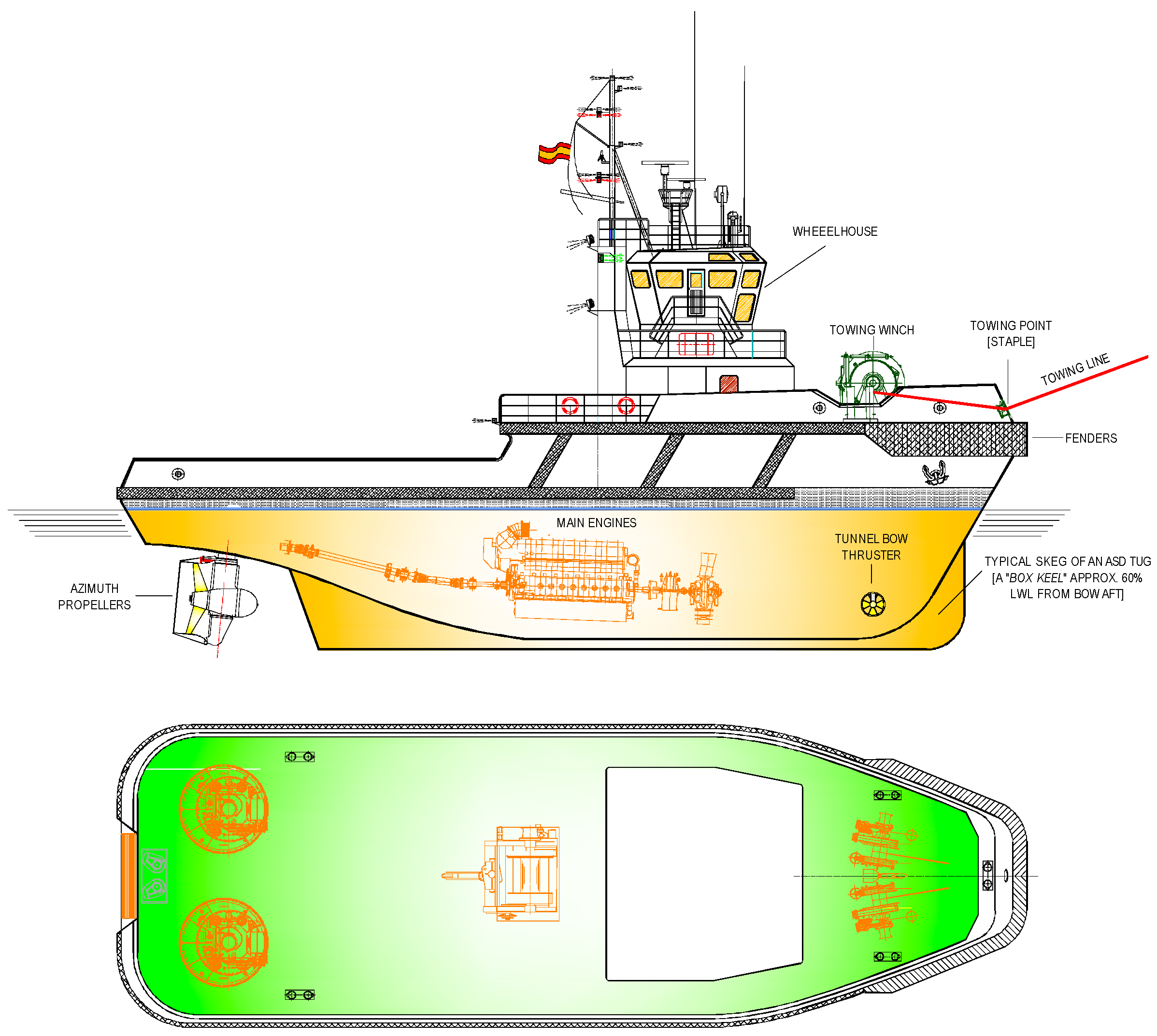
- Achieving an efficient underwater hull form and skeg capable of generating very high forces with different attack angles against the incoming waterflow. In those situations, the propulsion system is used to maintain this relative position by resisting the hydrodynamic force tendency over the tug to put the towline in line with their centerline [2].
2. Escort Towing Methods of an ASD Tug
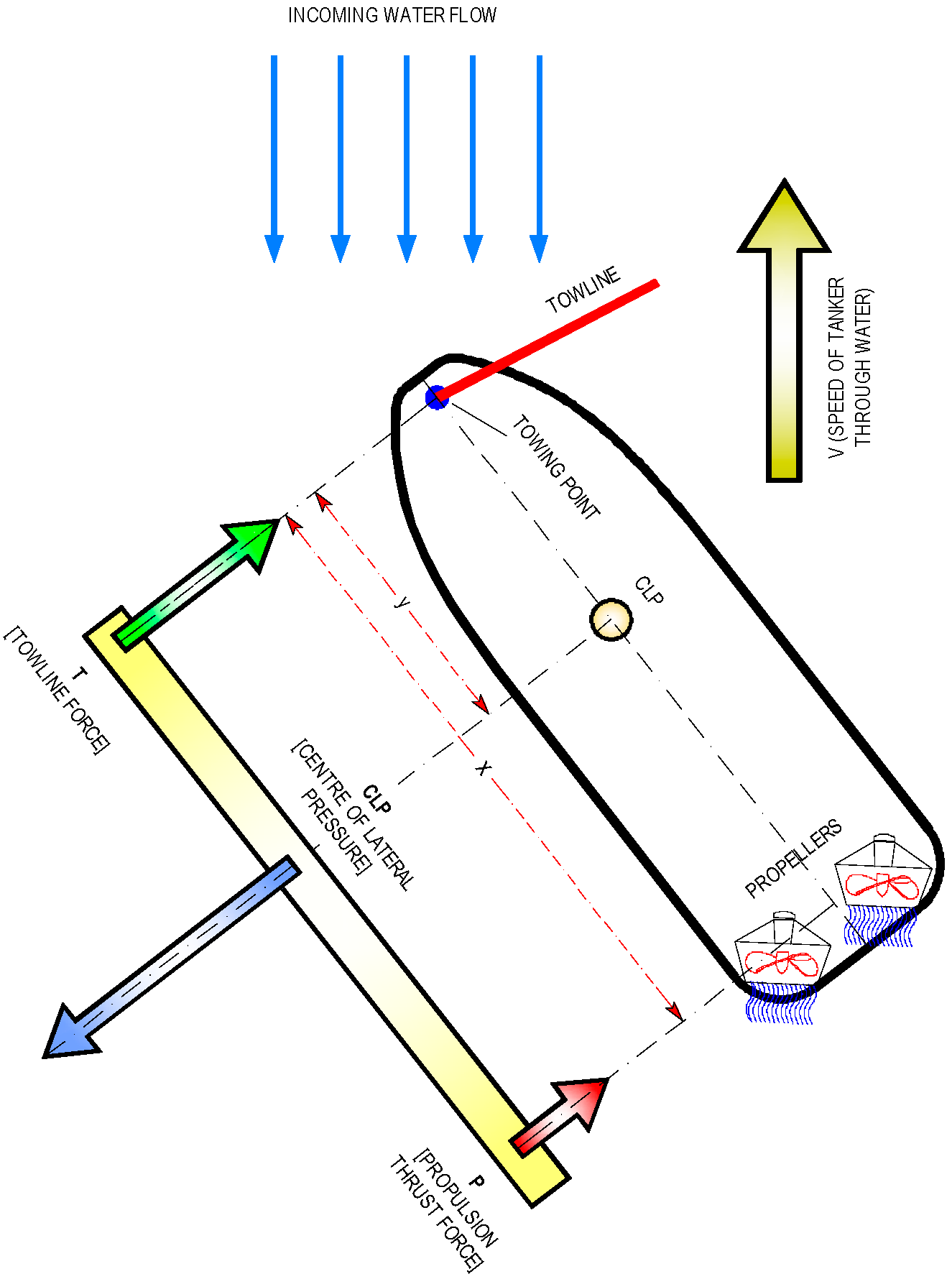
- Shift the center of lateral pressure (CLP) towards the end opposite the thrusters (i.e., towards forward) in the direction of the attack point of towline force. This is to increase leverage between the CLP and the thrusters so that the thrust necessary for the equilibrium of forces is minimized (Figure 2) [2] (pp. 155–156), and the towline force is maximized with this design option (Figure 1 and Figure 3). However, the CLP should be kept aft of the towing point (the staple) to ensure a “fail-safe” operation so that the towline force will not be prone to overturn the tug in case the propulsion system on the tug fails [10].
- Increase directional stability.
- Increase the underwater hull lateral area in the most effective way to improve the hydrodynamic effect at high speeds so that it generates high towline forces in the indirect mode.
- The direct mode, when forces in the towline are generated almost entirely by the thrusters alone and the towline works aligned with the tug’s centerline. This mode is effective at speeds lower than six knots, where the propulsion thrust dominates (around 90% of the towline force).
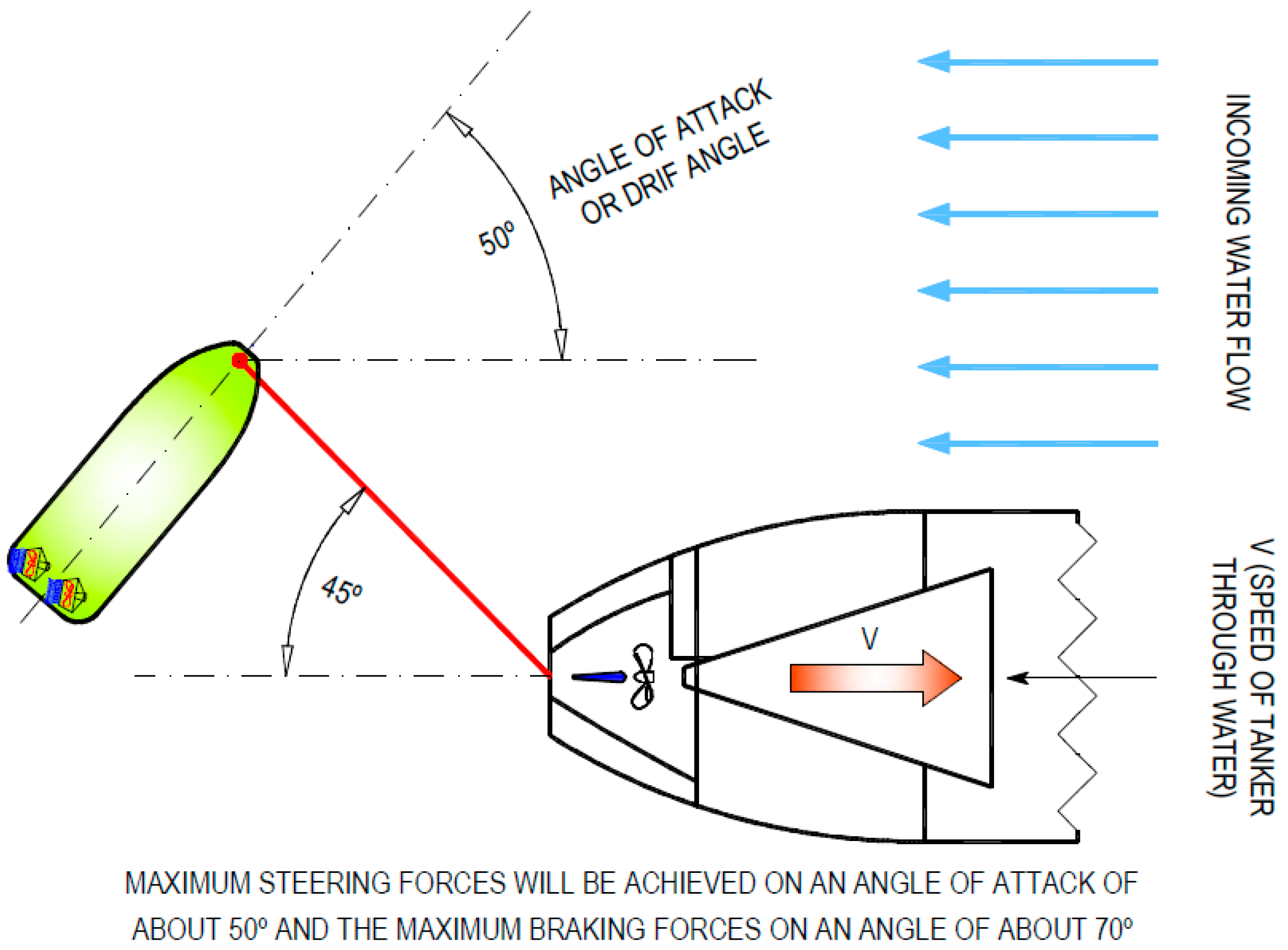
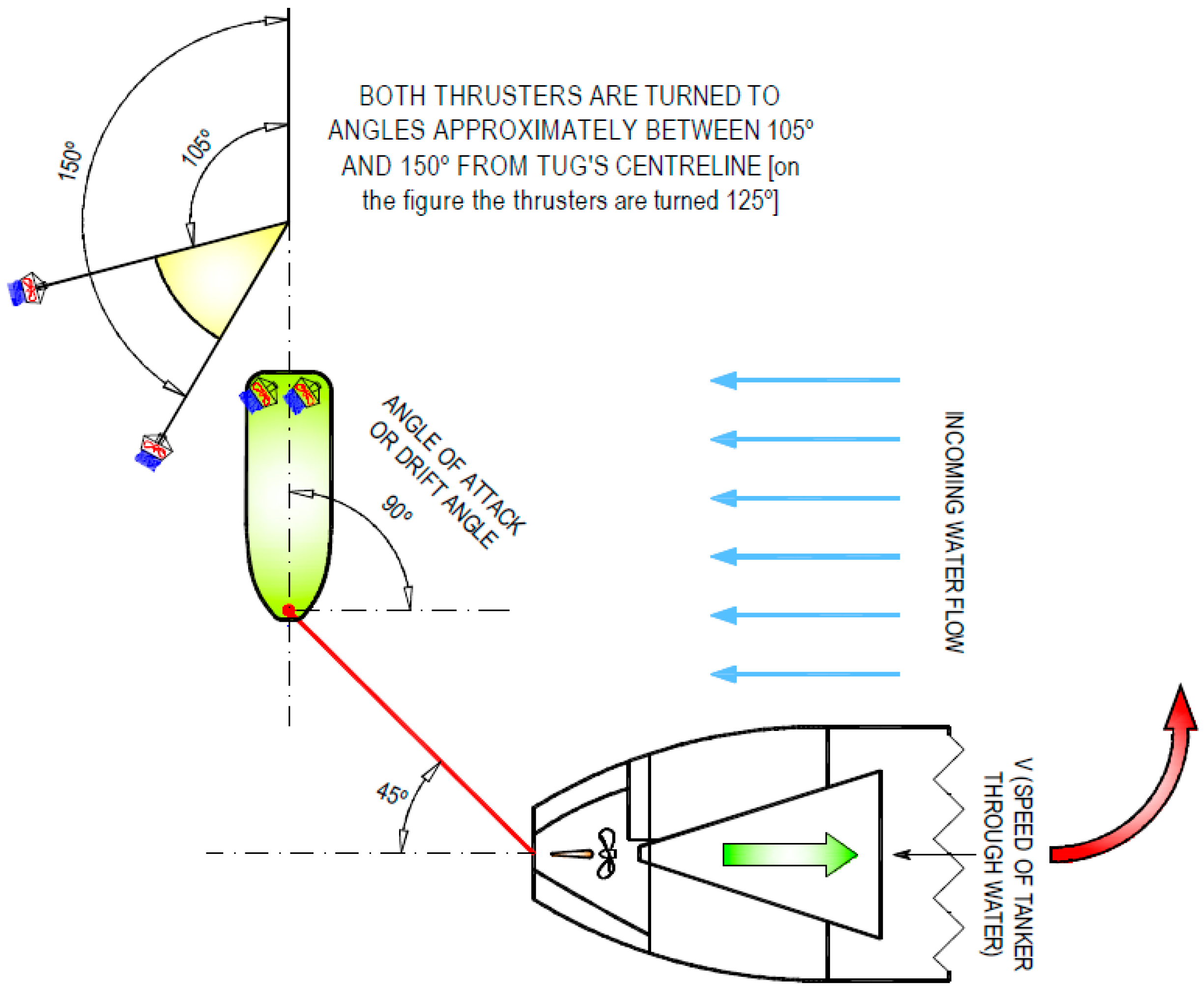
- The indirect mode, when thrusters are used to adopt an angle of attack against the incoming waterflow and the hydrodynamics of the tug underwater hull and skeg are used to create large braking and steering forces. This mode is effective at speeds higher than eight knots, when hydrodynamic forces from the hull begin to dominate (around 70% of the towline force).
2.1. The Direct Mode
2.2. The Indirect Mode
3. Evolution of Escort Tug Winches
3.1. Former Traditional Winch Technologies: Conventional and Constant Tension Winch
- When the tug needs to replace itself regarding the towed vessel, whether it is a conventional or a constant tension winch, it is necessary to pay out enough towline to allow the tug to move to its new position and then pull the line and reset the brake before resuming towing. During the time elapsed in this operation, the towed vessel is allowed to drift uncontrolled for several minutes.
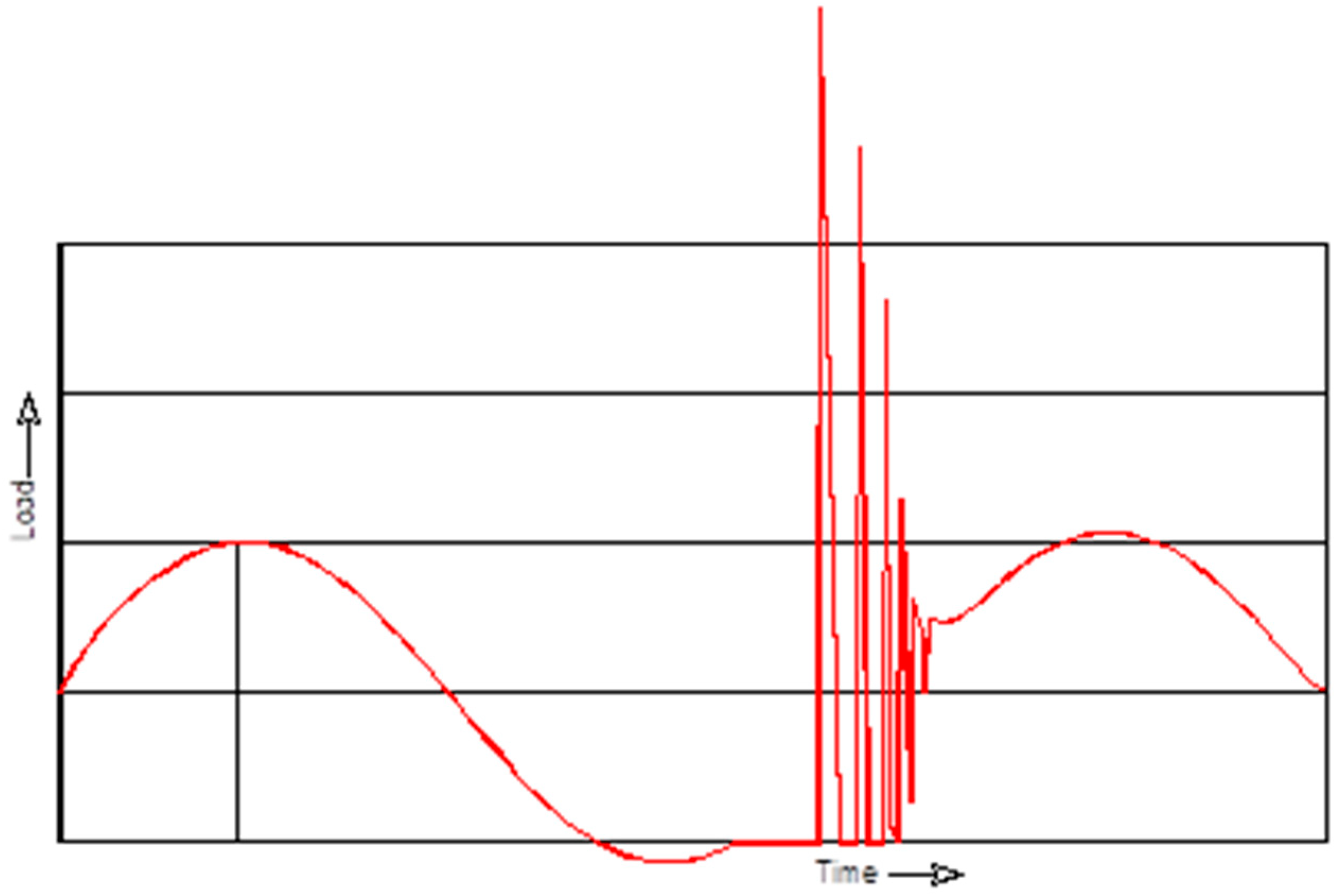
- The towline length should be considerably shorter, so the catenary and heavy towline are not available to mitigate the high forces produced as a consequence of significant relative motions between the tug and the tow created by waves. Therefore, controlling the high peak loads generated due to working in these dynamic environments is crucial from the safety point of view.
- The changes from drive to brake and vice versa are limited by manual control, which makes the operation rather slow;
- An overload can lead the towline to break;
- An emergency quick release is not always guaranteed;
- The winch drive may be damaged in pull/towing mode if peak loads are generated in the towline.
3.2. The Render-Recovery Winch as a First Step
- The number and intricacy of the components to (dis)connect drive and brake that can be prone to fail to operate properly (reliability);
- The slow reaction time, as it takes a few seconds due to the mechanical and control systems’ complexity.
4. New High-Performance Dynamic Winches
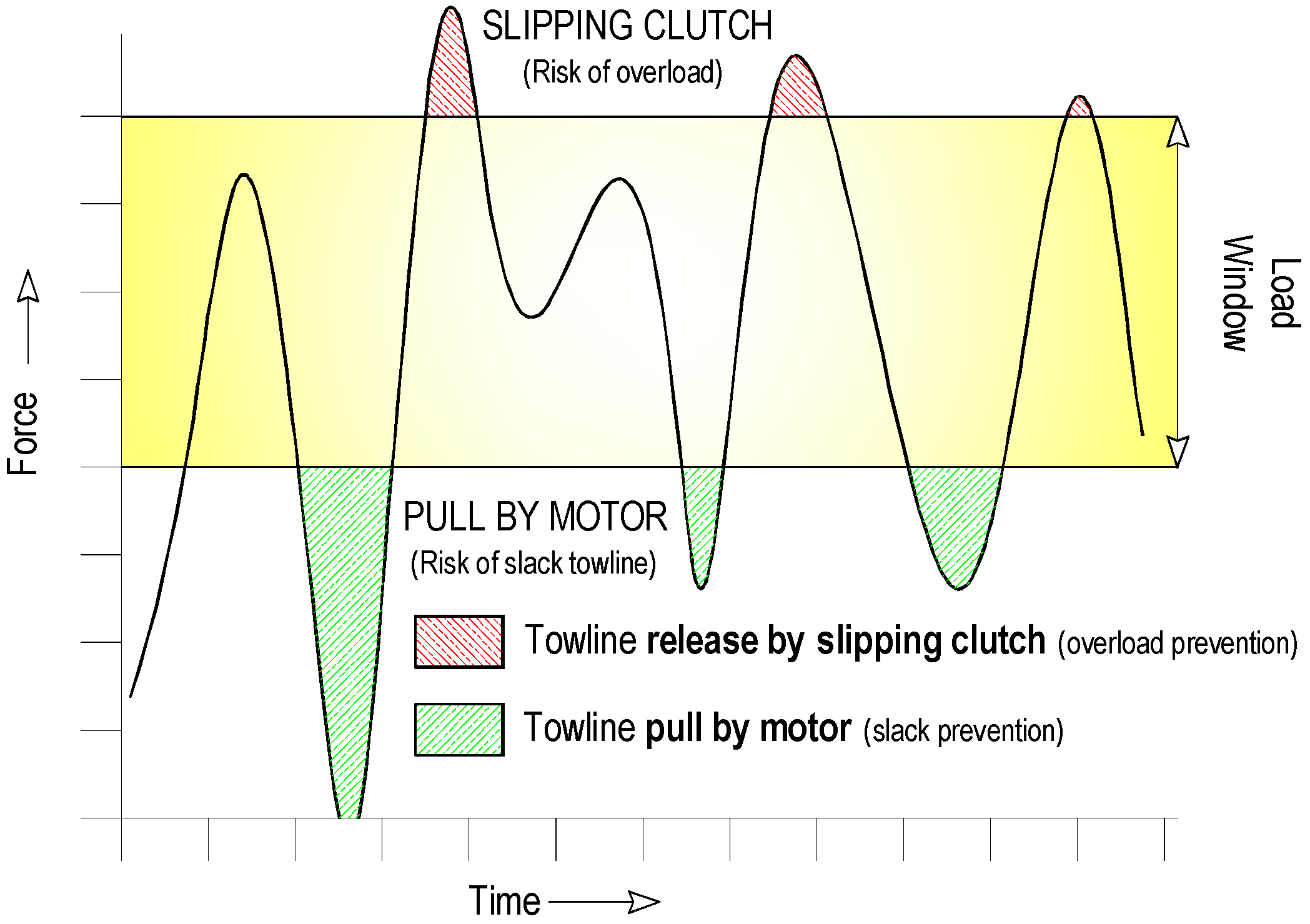
4.1. The Importance of Preventing Slack and Peak Loads in the Towline
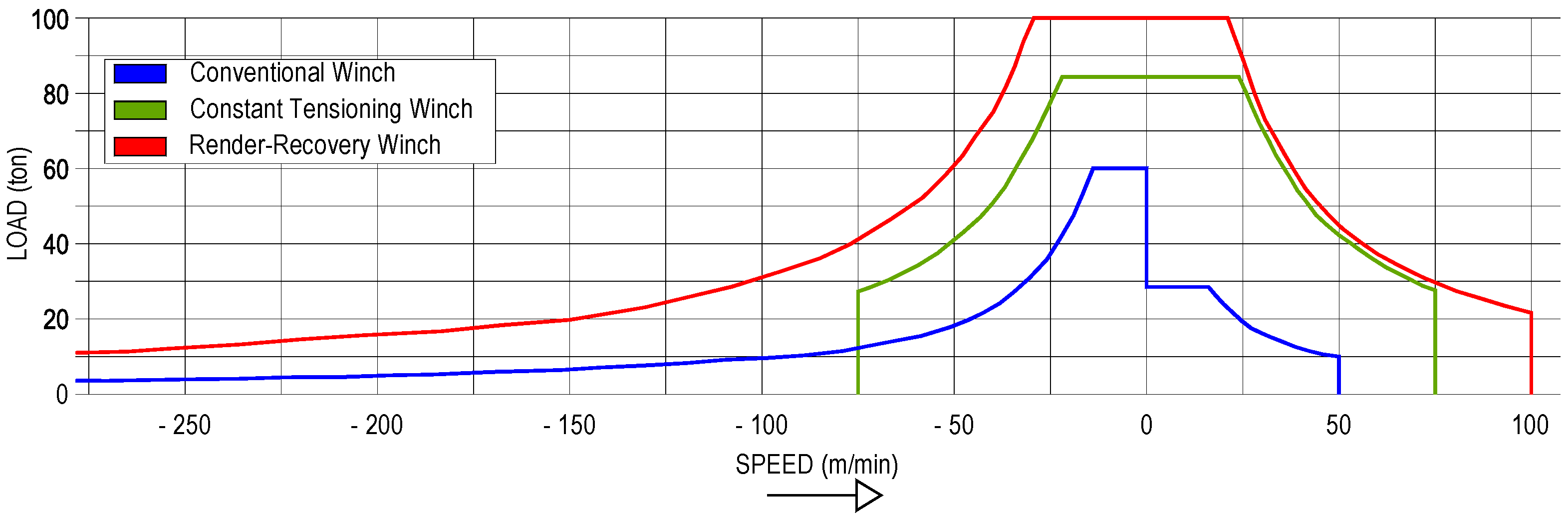
4.2. Performance of Winches
4.3. Closed Loop Monitoring and Proportional-Integral-Derivative (PID) Control System
5. The Towline
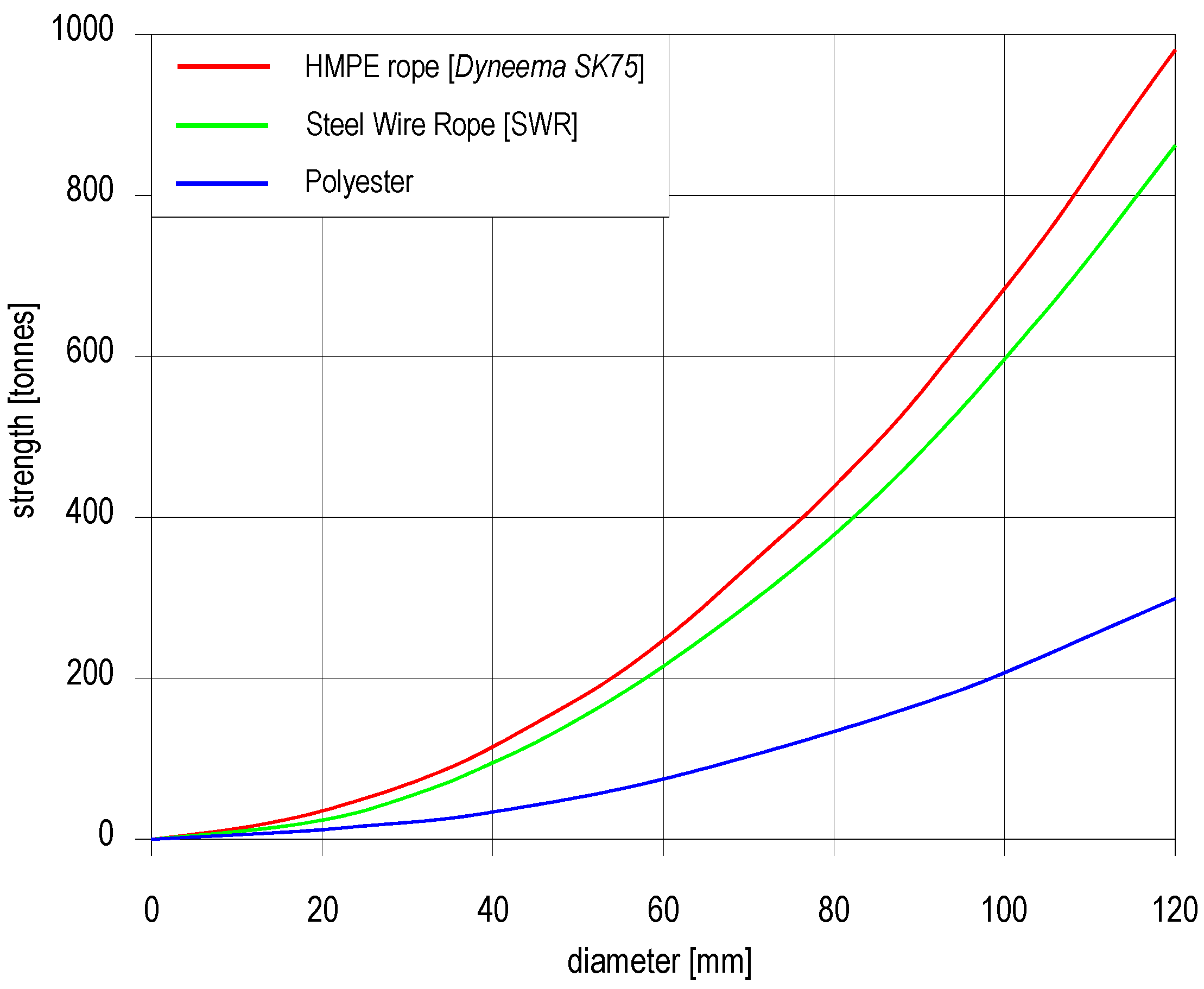
- As new high performance winches can achieve a dampening effect to control the high tensions generated in dynamic environments, the low-inertia characteristics of HMPE synthetic ropes that have very little elongation or stretch under load give them a better load control, which helps to work more safely. In this case, the best option is the use of an HMPE rope as the total tow rope (monolithic).
- In compliance with the Class Rules, the use of a less sophisticated winch (in case the tug owner does not embrace the new high performance winch concept) to limit slack line events and snap loads by increasing the elasticity of the towline with a higher elongation one such as polyester can, in comparison, attenuate the higher frequency energy better. Alternatively, an HMPE line connected with a stretcher (a short line of around 20 m in length with higher elasticity—typically polyester) to accommodate the tug motions with relatively little variation in the towline tension can be used. As it was traditionally made, these two options offer additional elasticity at the expense of having a higher risk of towline failure than with the previous strategy.
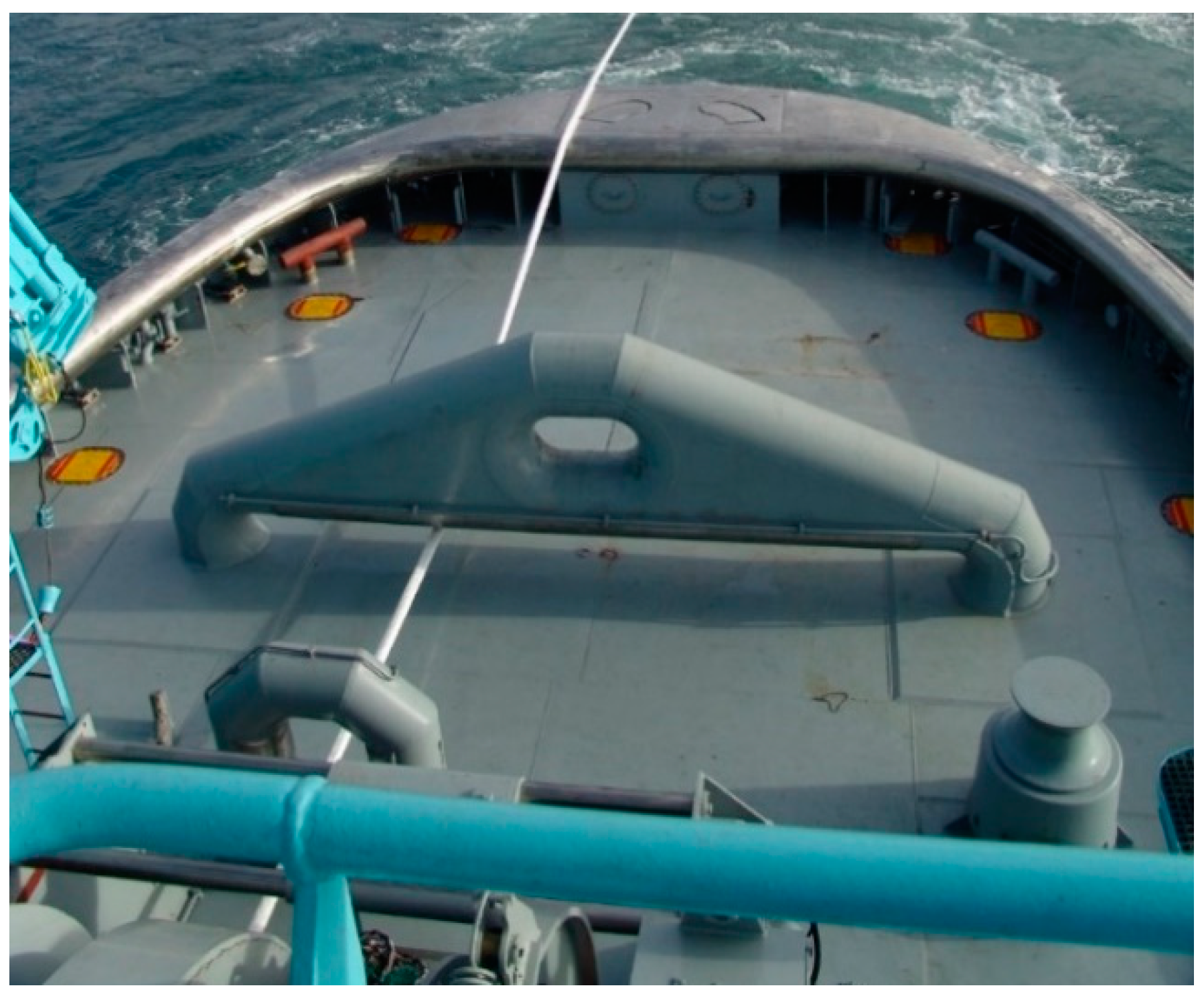
- Proper deck hardware: To minimize unnecessary abrasion damage, all surfaces in contact with the towline should be smooth (it is recommended to be kept at a maximum roughness of 250 microinches, μ”). Typically, on board the tug, this is achieved by well-designed stainless steel staple and bitts being highly polished (Figure 11) and with a generous bend radius—ideally, the cap rail should be made of stainless steel as well [24]. As the towline leads from the winch drum to the staple and then directly to the tanker, a point of fatigue is generated at the staple, which is exacerbated by the back-and-forth tug motions, which is the reason why water spray cooling is recommendable to dissipate heat due to the friction there [4] (Figure 13).
- Proper chafe protection: The localized abrasion points on the line should be protected by strategic positioning of chafe gear at the appropriate locations (to protect from both internal and external abrasion).
- Coating technologies developed by manufacturers: Manufacturers are developing coatings at yarn level to reduce internal abrasion enhancing rope wear and snag resistance.
6. Towing Winch Design Requirements
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Griffin, B.; Nishimura, G. How to Design a Big New Winch. Design Methodology of Winches for use in Dynamic Seas. Pac. Marit. 2007, 7, 1–4. [Google Scholar]
- Baniela, S.I.; Diaz, A.P. The First Escort Tractor Voith Tug with a Bulbous Bow: Analysis and Consequences. J. Navig. 2008, 61, 143–163. [Google Scholar] [CrossRef]
- Hensen, H. Tug Use in Port. A Practical Guide; The ABR Company Ltd.: Wiltshire, UK, 2018; pp. 235–263. [Google Scholar]
- Braidwood, I.; Allan, R.G. A Risk Profile for Escorted Tankers and Their Resistance to Collision Damage. In Damaged Ship IV; The Royal Institution of Naval Architects: London, UK, 2018; Available online: https://static1.squarespace.com/static/58ffe2e66b8f5b40c0cec664/t/5c8172af971a1811b3000599/1551987382686/Braidwood+Allan+RINA+Damaged+Ships.pdf (accessed on 6 February 2020).
- De Jong, G. The Class Answer to the Rapidly Developing Tug Industry. In Proceedings of the International Tug & Salvage Convention and Exhibition, Vancouver, BC, Canada, 7–21 May 2010; pp. 91–112. Available online: http://www.tugmasters.org/wp-content/uploads/2014/07/ITS-2010-The-Class-Answer-to-the-Rapidly-Developing-Tug-Industry-G-de-Jong.pdf (accessed on 11 February 2020).
- Allan, R.G. The Evolution of Tug Design through ITS Eyes. In Proceedings of the 25th International Tug, Salvage & OSV Convention and Exhibition, Marseille, France, 25–29 June 2018; Bury, J., Wraight, C., Eds.; The ABR Company Limited: Wiltshire, UK, 2018; pp. 31–49. [Google Scholar]
- Rowe, R.W. The Shiphandler’s Guide for Masters and Navigating Officers, Pilots and Tug Masters, 2nd ed.; The Nautical Institute: London, UK, 2000; pp. 129–165. [Google Scholar]
- Hensen, H.; Van der Laan, M. Tug Stability: A Practical Guide to Safe Operations, 1st ed.; The ABR Company: Wiltshire, UK, 2016. [Google Scholar]
- Allan, R.G. Escort Winch, Towline, and Tether System Analysis. Final Report for Prince William Sound Regional Citizens’ Advisory Council. 2012. Available online: https://www.pwsrcac.org/wp-content/uploads/filebase/programs/maritime_operations/tanker_escorts/escort_winch_towline_and_tether_system_analysis.pdf (accessed on 17 January 2020).
- Allan, R.G.; Molyneux, D. Escort Tug Design Alternatives and a Comparison of Their Hydrodynamic Performance. Trans. SNAME 2004, 112, 191–205. Available online: https://nrc-publications.canada.ca/eng/view/ft/?id=515af4f9-1f5e-4728-965b-3070df20cc6e (accessed on 17 January 2020).
- Brooks, G.; Slough, S. The Utilization of Escort Tugs in Restricted Waters. Port Technol. Int. 2001, 9, 221–228. [Google Scholar]
- Harold, P.D. A Dependable Escort. LNG Industry Magazine—Summer 2011. Available online: https://www.lngindustry.com/magazine/lng-industry/june-2011/ (accessed on 22 November 2019).
- van der Laan, M. The Safewinch—Lifeline to Safe Towing. BIMCO Bull. 2008, 103, 46–51. Available online: http://www.imcgroup.nl/downloads/Article_BIMCO_june2008.pdf (accessed on 9 January 2020).
- U.S. Navy Towing Manual. SL740-AA-MAN-010. Naval Sea Systems Command; Department of the Navy: Washington, DC, USA, 2002. Available online: https://www.supsalv.org/pdf/towman.pdf (accessed on 9 January 2020).
- Griffin, B. Ship Assist and Escort Winches for Dynamic Seas. The ARR Winch for Crowley Maritime Tug RESPONSE. In The 18th International Tug & Salvage Convention; Smith, A., Ed.; The ABR Company Limited: Wiltshire, UK, 2004; pp. 119–126. [Google Scholar]
- Allan, R.G. The State of Tug Safety Today. In Proceedings of the 25th International Tug, Salvage & OSV Convention and Exhibition, Marseille, France, 25–29 June 2018; Bury, J., Wraight, C., Eds.; The ABR Company Limited: Wiltshire, UK, 2016; pp. 25–36. Available online: http://seaways.net.au/wp-content/uploads/2018/07/The-State-of-Tug-Safety-Today.pdf (accessed on 17 January 2020).
- van der Laan, M.; Kraaijeveld, K. SafeWinch Tackles Slack Wires and Peak Loads. In Proceedings of the Tugnology’07 Conference, Southampton, UK, 11–12 June 2007; Available online: http://www.imcgroup.nl/downloads/Safewinch%20Article%20Tugnology.pdf (accessed on 9 January 2020).
- de Jong, J.H.; Armaoglu, E.; Bron, I.G.L.; van den Berg, J.; Grin, R.A.; ten Hove, D. Ship Assist in Fully Exposed Conditions—Joint Industry Project SAFETUG II. In Proceedings of the International Tug & Salvage Convention and Exhibition, Vancouver, BC, Canada, 7–21 May 2010; Gorman, D., Ed.; The ABR Company Limited: Wiltshire, UK, 2010; pp. 81–90. Available online: https://towmasters.files.wordpress.com/2010/09/its4_ship_assist_in_fully_exposed_conditions.pdf (accessed on 11 February 2020).
- Vlašic, D. Tug Safety: Some Conclusions from the SAFETY II Research Programme; Lloyd’s Register Technology Days; Paper 6; Lloyds: London, UK, 2011; pp. 63–73. [Google Scholar]
- Griffin, B.; Nishimura, G. High Performance Winches for High Performance Tugs—Winch and HMPE Rope Limitations. In Proceedings of the Tugnology’09 Conference, Amsterdam, The Netherlands, 19–20 May 2009. [Google Scholar]
- Griffin, B.; Dempke, B. High Performance Winches. Pac. Marit. 2006, 7, 22–25. [Google Scholar]
- Griffin, B. Commercial Marine Deck Machinery—30 Years of Change. Pac. Marit. 2009, 7, 1–3. [Google Scholar]
- Langerak, H. Escort Tug—Tow Winch Load Control. In Proceedings of the Tugnology’09 Conference, Amsterdam, The Netherlands, 19–20 May 2009. [Google Scholar]
- Crump, T.; Volpenhein, K.; Sherman, D.; Chou, R. Abrasion and Fibre Fatigue in High-Performance Synthetic Ropes for Ship Escort & Berthing. In The 20th International Tug & Salvage Convention; Gorman, D., Ed.; The ABR Company Limited: Wiltshire, UK, 2008; pp. 205–212. Available online: http://www.tugmasters.org/wp-content/uploads/2014/07/Terrycrump.pdf (accessed on 11 February 2020).
- Underhill, R. Fitting Fibre Rope to the Towing Winch—A Guideline. In Proceedings of the Tugnology’09 Conference, Amsterdam, The Netherlands, 19–20 May 2009; Available online: https://www.tugmasters.org/wp-content/uploads/2014/07/Fittingfibrerope.pdf (accessed on 9 January 2020).
- OCIMF. Guide to Purchasing High Modulus Synthetic Fibre Mooring Lines, 1st ed.; OCIMF and SIGTTO: London, UK, 2014; Available online: https://www.ocimf.org/media/53251/guide-to-purchasing-high-modulus-synthetic-fibre-mooring-lines-februar.pdf (accessed on 9 January 2020).
- Arie, N. Ships’ Deck Fittings Utilised for Towage. In Proceedings of the 25th International Tug, Salvage & OSV Convention and Exhibition, Marseille, France, 25–29 June 2018; Bury, J., Wraight, C., Eds.; The ABR Company Limited: Wiltshire, UK, 2018; pp. 103–116. Available online: https://www.chirpmaritime.org/wp-content/uploads/2018/12/Ship-Fittings-by-A-Nygh.pdf (accessed on 17 January 2020).
- Wardenier, S. Improved Efficiency in Connecting Tugs to Vessels. In Proceedings of the Tugnology’11 Conference, Antwerp, Belgium, 17–18 May 2011. [Google Scholar]
- OCIMF. Static Towing Assembly Guidelines (STAG), 1st ed.; The Oil Companies International Marine Forum (OCIMF): London, UK, 2020; Available online: https://www.ocimf.org/media/154730/Static-Towing-Assembly-Guidelines-2020.pdf (accessed on 5 October 2020).
- Griffin, B. Deck Machinery Mooring Issues. Pac. Marit. 2003, 7, 25–28. [Google Scholar]
- BV. Rules for the Classification of Steel Ships (NR467); Part E Service Notations for Offshore Service Vessels and Tugs [NR467.E1 DT R03 E]: CHAPTER 1 TUGS. Section 3 Hull Structure. 3 Additional Requirements for Escort Tugs. 3.2 Equipment for Escort Operations; Bureau Veritas: Paris, France, 2020; pp. 46–48. Available online: https://marine-offshore.bureauveritas.com/nr467-rules-classification-steel-ships (accessed on 5 October 2020).
- DNV GL. Rules for Classification; Part 5 Ship types. Chapter 10 Vessels for special operations. SECTION 11 TUGS AND ESCORT VESSELS. 6 Additional Requirements for Escort Tugs. 6.3 Equipment. 6.3.1 Towing Winch; DNV GL: Oslo, Norway, 2020; Available online: https://rules.dnvgl.com/docs/pdf/xtra/dnvgl-class/2020-11/dnvgl-class_2020-11.zip (accessed on 5 October 2020).
- Griffin, B.; Van Buskirk, J.; Greene, R.W. Methodology for the Selection of Winches and Ropes for Assist and Escort Tugs in Dynamic Seas. In Proceedings of the Tugnology’07 Conference, Southampton, UK, 11–12 June 2007; Available online: http://seaways.net.au/wp-content/uploads/2015/12/Escort-tugs-BarryGriffin.pdf (accessed on 14 November 2020).
- Hensen, H. Ship Bridge Simulators: A Project Handbook, 1st ed.; The Nautical Institute: London, UK, 1999. [Google Scholar]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iglesias-Baniela, S.; Vinagre-Ríos, J.; Pérez-Canosa, J.M. Ship Handling in Unprotected Waters: A Review of New Technologies in Escort Tugs to Improve Safety. Appl. Mech. 2021, 2, 46-62. https://0-doi-org.brum.beds.ac.uk/10.3390/applmech2010004
Iglesias-Baniela S, Vinagre-Ríos J, Pérez-Canosa JM. Ship Handling in Unprotected Waters: A Review of New Technologies in Escort Tugs to Improve Safety. Applied Mechanics. 2021; 2(1):46-62. https://0-doi-org.brum.beds.ac.uk/10.3390/applmech2010004
Chicago/Turabian StyleIglesias-Baniela, Santiago, Juan Vinagre-Ríos, and José M. Pérez-Canosa. 2021. "Ship Handling in Unprotected Waters: A Review of New Technologies in Escort Tugs to Improve Safety" Applied Mechanics 2, no. 1: 46-62. https://0-doi-org.brum.beds.ac.uk/10.3390/applmech2010004