Soft Robotic Hands and Tactile Sensors for Underwater Robotics


Department of Mechanical Engineering, University of Massachusetts Dartmouth, 285 Old Westport Road, Dartmouth, MA 02747, USA
*
Author to whom correspondence should be addressed.
Appl. Mech. 2021, 2(2), 356-382; https://0-doi-org.brum.beds.ac.uk/10.3390/applmech2020021
Submission received: 31 March 2021
/
Revised: 22 May 2021
/
Accepted: 3 June 2021
/
Published: 8 June 2021
Abstract
:Research in the field of underwater (UW) robotic applications is rapidly developing. The emergence of coupling the newest technologies on submersibles, different types of telecommunication devices, sensors, and soft robots is transforming the rigid approach to robotic design by providing solutions that bridge the gap between accuracy and adaptability in an environment where there is so much fluctuation in object targeting and environmental conditions. In this paper, we represent a review of the history, development, recent research endeavors, and projected outlook for the area of soft robotics technology pertaining to its use with tactile sensing in the UW environment.
1. Introduction
As robotic platforms and drone technologies have become more refined through the mid-20th century, there has been a major shift toward UW exploration in the form of human hands-off approach [1,2]. The use of remotely operated vehicles (ROVs), unmanned underwater vehicles (UUVs), autonomous underwater vehicles (AUVs), and top-side controlled systems have become more regularly employed to deliver safer and more practical solutions in accessing environments with extreme conditions [3,4,5,6,7]. For example, an automated solution to the visual inspection problem of hydroelectric dams has been proposed by employing a small AUV which can be controlled by four degrees of freedom [6], recovery missions have been carried out by maneuvering a Semi-Autonomous Underwater Vehicle for Intervention Mission (SAUVIM) which could also be manipulated fully autonomously [7], a European research and development project has focused on developing underwater mobile robot-modules which are not be connected physically rather via communication links [5], and so on. However, due to the rigid-mechanics hosted by more conventional robotic systems, there exists a disconnect between theoretical robot capabilities and adaptability to uncontrolled environments with varying degrees of geometric and environmental conditions. This disconnect usually translates to restriction in a machine’s degrees of freedom (DOF) and its inability to interact with foreign objects of complex nature without imposing damage. To bridge the gap, the fusion of soft robotics with UW technologies has become a highly regarded solution to mitigate damage control and enhance the capabilities of interactions imposed by robotics systems on complex and foreign conditional situations [8,9,10]. Soft robots prove to be effective in infiltrating, climbing, and holding delicate materials or living creatures [11]. This delicacy employed toward manipulation is incredibly important when interacting with the organic natural environment of the UW oceanic territory. Therefore, in order to handle the research amid a diverse marine ecosystem, it is quite pragmatic to fuse the technologies of soft robotics and UW robotic platforms. For instance, Serchi et al. showed that changing the body shape of a soft-bodied vehicle can benefit the propulsive forces required in the UW environment [12], Galloway et al. presented a benchmark work-study recently where they designed the principles for soft robotic end effectors, and they had also manipulated their own soft robotic end effectors for the non-destructive sampling of benthic fauna in deep-sea environments [13]. More extensively, today’s conventional UW robots are primarily contingent upon camera sensing capabilities. However, there exist many situations of low visibility in the larger part of the UW atmosphere. As an alternative or merged solution, tactile sensors provide a key role in sensing, controlling, and manipulation in opaque UW environments. Therefore, in recent years, there has been a combined research effort around the world toward fabricating industry-level tactile sensors that can be functionally integrated with soft robotic systems hosted by UW technologies [14,15].
The domain of UW soft robotics has the potential to pioneer the ways in which we as humans interact with the ocean through robotic control. It provides enhanced physical awareness and acute-capability for engaging with nature’s organic systems as well as for interacting with human-imposed mechanical systems. In this manner, soft robotics tailors toward a more sustainable and efficient practice of robot interaction with the UW world while contributing to an increased state of well-being of planet Earth through preservative means of human exploration and interaction. In this article, a brief history of soft robots will be provided followed by a presentation of recent innovations pertaining to tactile-sensor fusion with soft robots. In such a manner, case-study examples will highlight the implications that soft robot and tactile sensor fusion face in a UW regime. Such a review will help researchers spanning interdisciplinary fields develop an objective understanding of the dynamics of current UW soft robotics research and its prospects.
2. A Brief History of Soft Robotics
2.1. Emergence of Soft Robotics
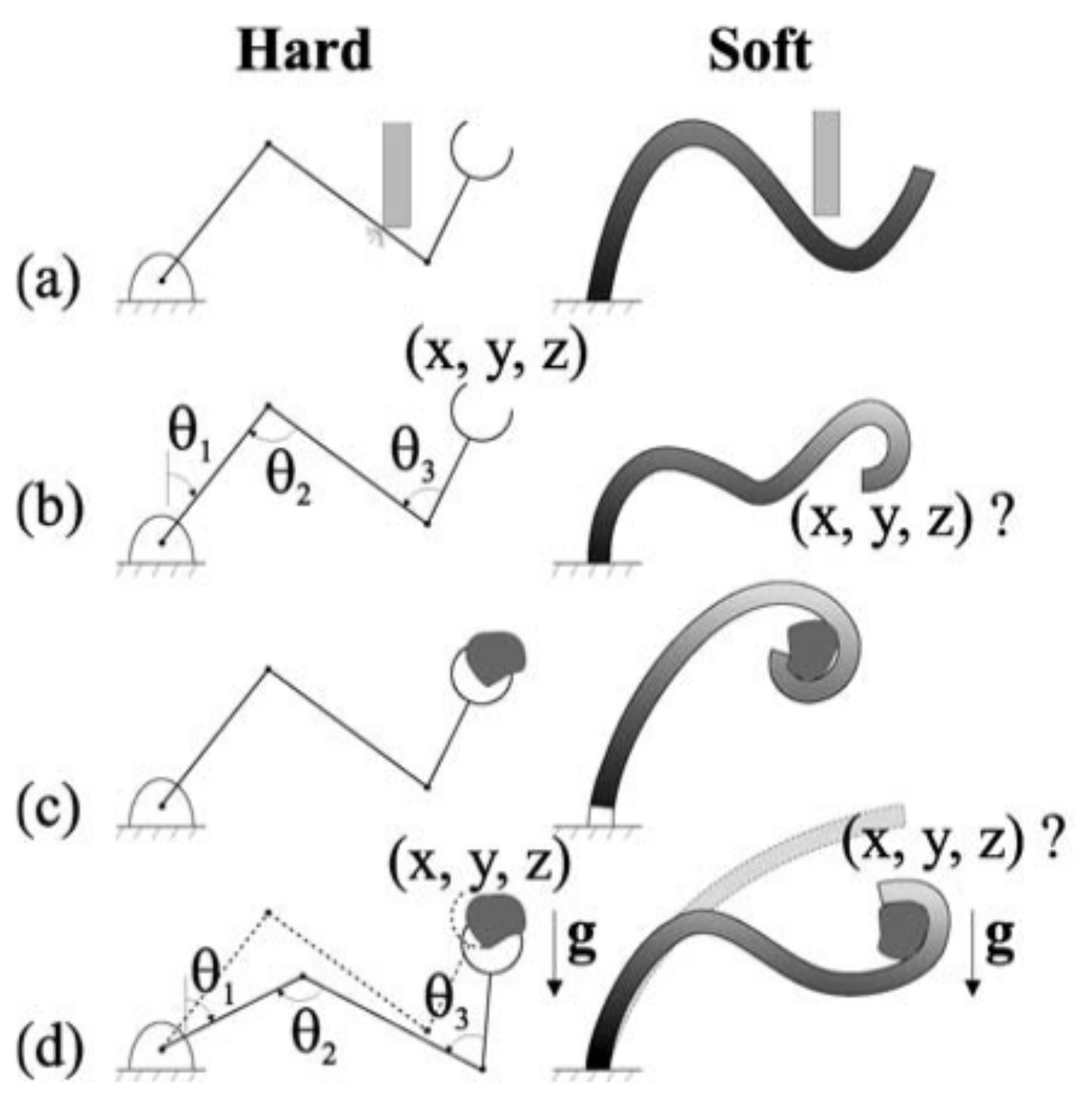
In terms of mechanics, nature is perhaps the greatest teacher for functional design. There are many examples of living creatures that out-perform machines, where physique or behavioral patterns inspire researchers to adopt biological concepts into design. In such a manner, bio-mimicry is a sought-after approach for modeling machine design and structural mechanics that must comply with organic or complex environments. More specifically, biological physics that benefits from the flexibility and deformable behavior of animals has influenced researchers to develop a relatively new field of robotic design, soft robotics. Traditional solid-mechanics robots, also known as hard robots, are widely employed by large-scale operations where the conditions of an environment are pre-defined, motion is prescribed and the precision of movement is consistent. Two examples are the use of hard robots in modern-vehicle assembly and packaging industries. The accuracy of these machines benefits from coupled linkages that allow rotary or linear motion with each added DOF in motion. Although increasing the complexity of the linkages and utilizing shape memory alloys (SMAs) in solid-mechanics contributes to an increased range of motion, these principles of design remain unfavorable for environments that fluctuate in conditions, require fragile operations, or are integrated with humans [16]. This largely imparts due to high-magnitude force application, rapid movement, and heavy-set structural mechanics of traditional hard robots [17]. On the contrary, soft robots resolve this extensive set of challenges due to their adaptable nature of the flexible and soft composition. Distributed and multi-axial deformation in soft robots not only possesses a nearly infinite number of DOF but also allows soft robots to achieve nearly any shape and configuration in three-dimensional space. Furthermore, soft robots inflict minimal gripping impact to compressive loads and can deform to a much higher percent of elongation without harboring dangerous strains. In this way, soft robots exhibit precedence over their hard counterpart by providing adaptability to soft and fragile entities, safe interactions with humans, and increased fluctuations in movement. The difference in the dexterous capability of soft robots compared to conventional hard robots is depicted in Figure 1.
The fruition of soft robotics was conceived from discussion in the 1990s with efforts to bio-mimic the motion of creatures lacking endoskeletons. Typical creatures of this early focus included worms, jellyfish, and starfish. A materials science research group by the name of Defense Science Research Council (DSRC) carried out the early stages of soft robotic development funded by Defense Advanced Research Projects Agency (DARPA). ’ChemBot’ was a soft robot that was proposed to replicate the appearance of a soft-drink can [18,19]. Upon autonomous command, ChemBot would deform its shape to exhibit worm-like movement, detect the presence of a door, crawl under the door, and re-form its can shape on the other side. Although the project outcome was not completely successful in its performance, it did inspire new considerations for component technologies. In fact, it was the nucleation for soft robots from a technical point of view.
2.2. Recent Technologies
This section provides a glimpse of the sensing capability, actuation methods, and materials used in the field of soft robotics developed in recent years. Readers may find more detailed information about the recent trends and technologies related to soft robotics in [10,21,22].
The earliest example of a pragmatic soft device was developed as a gripper in the shape of a pentagonal star [18,23]. Since its early-stage fabrication, there have been numerous design offshoots that mimic the concepts of tentacles and soft-walking mechanisms. For instance, Wang et al. demonstrated a 3D-printed plant-tendrils-inspired soft gripper that includes bending, spiral, and helical distortions for grasping [24], Shephered et al. presented a multigait soft robot that could mimic crawling and undulation gait motion to navigate difficult obstacles utilizing five actuators without having any sensor [25], and so on. However, there still exists a lack of competence for sensing capabilities and controlled motion when comparing these devices to nature’s least most capable cephalopods. Many typical sensors utilized in hard robots become obsolete in the case of compliance and morphology to soft robotics due to their specialized function in an application. Thus, there is currently a large research effort dedicated world-wide toward developing stretchable electronics such as electronic skin [26], screen-printed curvature sensors [27] that realize multiple degrees of curvature, as well as chemical and biological-based sensors [21].
To this point in time, soft robot prosthetic hands and grippers are primarily developed based on pneumatic actuated pressure vessels that cause deformation and elongation of a control surface, sometimes making use of embedded fibers and tendons to limit or inhibit aspects of a motion [28]. These pressurized actuators can range from uni-directional bend to omni-directional bend depending on the complexity of airflow channels, embedded fiber composition, and material composition. The most basic form of this idea is a uni-directional pneumatic actuator which deforms due to a uniformly pressurized chamber [23]. A fiber-reinforced material for soft actuators has shown its shape memory effect that inhibits deformation in unfavorable directions [29]. A McKibben muscle, as another example, uses a network of pressurized fiber-reinforced actuators that operate in unison to govern a motion range based upon the pressure applied to each vessel in the network. Similarly, twist-and-coil actuators cause twisting and coiling deformation as a bi-product of fiber re-reinforcement prescribed pressure [30]. Hydraulically amplified self-healing electrostatic (HASEL) actuators with muscle-like performance are also under experimental consideration [31]. HASEL actuators can perform all three basic modes of actuation (expansion, contraction, and rotation). They can incredibly withstand linear strains >100%, and almost 20% strain at frequencies above 100 Hz, and possesses a specific power greater than 150 W/kg. Furthermore, innovative technologies such as the peripheral neural mechanism for precise control of point-to-point movements [32], actuation based on the chemical to mechanical energy conversion [33], edible pneumatic actuators based on gelatin-glycerol material [34], etc. have also been demonstrated by various researchers around the world. Descriptions about some other actuation approaches such as joint torque-controlled actuation, series elastic actuation, parallel-distributed actuation, etc. can be found in [35].
Light-driven actuation is another noteworthy example of recent technologies. A detailed review on light-driven actuation can be found in [36]. In this actuation method, Liquid Crystalline Polymers (LCPs) are programmed to experience three-dimensional shape changes in response to light. Employing this technology toward animals’ emulation of movement like caterpillars [37,38], snails [39], and inchworm [40] have already been carried out. In most cases, photothermal dyes are used for actuators. They absorb light in order to heat the polymer network above the nematic to isotropic transition temperature, provoking fast and local contraction which is then exploited to power locomotion. Other examples make use of local alignment patterns to incite area selective motion without needing localized illumination.
Very recently, Di-electric Elastomer (DE) actuators have also been employed in an untethered soft robot inspired by snail-fish for deep-sea exploration [41]. Two pre-stretched DE membranes are used to sandwich a compliant electrode (carbon grease) for each DE muscle. The soft robot has onboard power (2500 mAh Li-ion battery) and its control and actuation are protected from pressure consolidating electronics in a silicone matrix. The robot has been tested successfully in the Mariana Trench down to a depth of 10,900 m. Implementing magnetic composite elastomer lappets, external oscillating magnetic field actuated jellyfish-like soft-bodied multi-functional millirobots have been reported [42]. The robot can swim in five different modes and trap objects from outside to the inside comparably to the predation behavior of an ephyra.
In terms of materials, silicone was adapted as the earliest medium used for soft robotics due to its simple fabrication process and overall quality control in design. Electro-conjugate fluid finger by Nagaoka et al. [43], design of soft pneumatic actuators by Elsayed et al. [44], and pneumatic curling rubber actuator by Wakimoto et al. [45] are some examples of silicone made actuators. However, more recent material developments have contributed toward a wider range of employable materials and fabrication methods, which is translating to more sustainable design and enhanced capabilities of soft robots. For example, environmentally friendly options like polydimethylsiloxane (PDMS) [46], shape memory alloys [47], self-healing materials [48], and other biodegradable polymers such as poly-glycerol sebacate itaconate (PGSI) [49] are becoming more prominent material choices in the developing field. These materials provide superior properties in terms of micro-scale usage, and self-healing, which translates to reduced maintenance and cost. Eventually, these types of materials will likely replace traditional silicone and create new capabilities in soft robotics. In other news, experimentation with thermoplastics has been conducted for the development of variable stiffness structures (VSS), which allow soft robotic designs to vary in stiffness due to thermally activated mechanical properties. A case study example is the design of a helical manipulator that is able to vary the properties of its bending with controlled variability in its thermal properties. The benefits of this thermoplastic design allow the gripper to grasp objects that weigh up to 220 times of its own mass [50]. Newer design methods for material structures such as shape deposition manufacturing (SDM) [51,52], smart composite microstructure (SCM) design [53,54,55,56], 3D-printed actuators [57,58,59,60], and multi-actuation pneumatic networks are translating to increased strength capabilities for soft robotics over the more traditional approach to basic single-motion actuators [61]. The SDM method is quite handy in free form of fabrication of solid complex geometries [51]. It is capable of generating geometrically accurate, dense, and metallurgically bonded functional metal shapes with good surface appearance. It can even mimic the way biological structures are composed. Cham et al. reported a functional biomimetic design of hexapedal robots which showed robust performance close to those present in nature [52]. SCM is another manufacturing process that allows a rigid link made of carbon fiber composites to be integrated with flexible joints made of polymer film [53]. This method involves cutting a flat composite and polymer film into the appropriate shape with micro laser machining and then laminating the various materials to produce an integrated structure. Some examples for SCM based manufacturing in recent times are buckling pneumatic linear actuators by Yang et al. [54], biomimetic inchworm robot: Omegabot by Koh et al. [56], programmable sheets which can change their shapes autonomously by folding by Hawkes et al. [55], and so on. 3D-printing is one of the newest forms of technology that has been manipulated for fabricating different parts of the soft robotics system. Some prominent examples of 3D-printing technology are the 3D-printing technique of soft pneumatic actuators relying upon fused deposition modeling (FDM) [57], the 3D-printing method for printing linear bellows actuators, gear pumps, soft grippers, and a hexapod robot, employing a commercially available 3D-printer [58], embedded 3D-printing for soft somatosensitive actuators [59], and printing stretchable UV-curable (SUV) elastomers (can be stretched up to 1110%) utilizing digital-light-processing (DLP)-based 3D-printing technology [60], etc. Thus, it can be said without any confusion that the manufacturing methodologies for soft robotics are evolving constantly.
Motion capabilities are of specific interest in the development of soft robot systems. Considering the variability in movement mechanics hosted by different species of animals suited for the specific habitat needs, research endeavors of soft robot movement aim to simulate more unique and wider-range motions. Current motion capabilities inherent to soft robot systems include complex movements of grabbing, rolling, jumping, crawling, and even forward-projected motion through a tube. One specific example of crawling exists in a multi-gait soft robot that is capable of moving linearly [25]. Another type of motion is exhibited by the GoQBot that can replicate caterpillar-like movement [62]. Additionally, there exists both a mesh-worm soft robot and an inchworm soft robot that exhibit peristaltic locomotion and abdominal contractions, respectively.
In the mesh-worm, peristaltic locomotion is achieved due to the antagonistic arrangement of circular and longitudinal artificial muscle groups. The artificial muscle groups are composed of flexible braided mesh-tube coil actuators wrapped in a spiral pattern through the body of the mesh-worm [63]. The inchworm robot is capable of two-way linear and turning movement due to its compartmentalized three-tier body. It is separated into three groups: the body, the back foot, and the front foot. Shape memory alloy wire is embedded longitudinally in a soft polymer to imitate the longitudinal muscle fibers that control the abdominal body contractions of the inchworm during locomotion. The robot performs gait movement by modifying the friction coefficient in each of its feet controlled by a looping gait actuation pattern [64]. Further movement studies in soft robotics include a quadrupedal soft robot design for navigating through rough terrain [65], while other researchers have also developed systems to replicate the movement of sea-creatures like a fish which are capable of silent organic transitions of diving and lateral movement [66], as well as a cephalopod exhibiting more organic forms of silent forward propelled motion [67]. As motion studies continue to unfold the advancements in simulated movements will allow soft robots to more closely mimic biological movement translating to a more adaptable exploration of extreme environments.
2.3. Challenges
The development of such a robust field of robotics comes with inherent challenges that needs to be solved before soft robots are frontally available for commercial and personal use in our daily lives [68]. One of these challenges is attaining stretchable multi-modal sensing capabilities [69]. Current research efforts worldwide are focused on developing sensor technologies that are adaptable to multi-point sensing and stretchable in nature. Along this line, there are needs for developing highly stretchable (>200%) and conductive materials that can minimize noise and power consumption. Although research developments of liquid metals possess good conductivity [70], the sophisticated fabrication process and the possibility of leakage lessen the appeal for applications in which they must be contained within a stretchable medium. Researchers are working on efforts to simplify their fabrication along with developing technologies of nano-composites [71], conductive polymer/hydrogel [72], bulking/wrinkling structures [73], and stretchable textiles [74]. In conjunction with research efforts to develop flexible and conductive material solutions is a technological push toward more advanced stretchable electronics that can be embedded into flexible elastomers. Wearable electronics remain relatively 2D due to engineering constraints and electronics performance limitations. However, 3D architectures for open-mesh interconnected electronics are the preferred method for compliant and accurate wearable electronic networks despite their complexity to design and fabricate [73]. Additionally, high-fidelity signal skin-like electronics that can adhere to human skin are desirable for applications of health monitoring and care. These advanced electronics networks, however, require sophisticated fabrication techniques that usually suffer from a reduced density of electronics devices in an array [75]. A corresponding need is the ability to interpret real-time data which helps to realize complex shapes and motion detection during an operation, as opposed to post-processed data [76,77].
A major challenge imposed on the general field of electronics, and to soft robotics more specifically, is an adaptation to an extreme or remote environment. Two remote frontiers that remain relatively unexplored by soft robots are outer-space and the deeper depths of the ocean. In these challenging frontiers, radiation tolerance, heat dissipation, system performance with respect to size, as well as power limitations, are major drawbacks [78]. Additionally, more conventional robots lack the mechanical aptitude to comply and grapple with remote and rough terrain. Recent mechanical developments such as the Dexhand [78], Spinyhand climbing robot [79], and surface-gripping climbing robot are providing new insights into the mechanical design of rough terrain [80]. These design solutions, though, are still relatively rigid in their mechanics and may not suit well to soft organic environmental adaptation. In addition, excess power consumption and lack of real-time data feedback remain inherent hurdles with these exploratory robots. The reader should also consider that, while these three robot solutions feature more hard-mechanics composition, the comparable pneumatic actuated soft robot with similar capabilities would likely feature cumbersome secondary features to account for its fluid power.
Regarding ocean exploration, challenges inherent to the environment include compression forces imposed on chambers filled with compressible-gas at deep depth and the difficulty to communicate data through varying salinity of the water. While communications can be maintained with drones during areal and space transit, communications with UW robots must be regulated via tether connection or acoustic communications in conjunction with physics-based calculation systems that are prone to energy consumption and approximation drift. Soft robot solutions such as the Octobot are leading the way for soft undersea exploration; however, there is still major progress needed before soft robot systems prove effective in undersea applications [81]. Compounding on exploration, implemented solutions for UW manipulation include soft end-effectors that mimic cephalopod movements [13], but these movements remain quite simple and relatively ineffective for calculated and well-informed undersea manipulation.
3. Soft Robotic Hands in UW Applications
Since the development of manipulator systems in the 1950s, the oil and gas industry has relied heavily on manipulator technologies for operations in severe oceanic environments. These typical systems operate via hydraulic power and are designed for heavy-duty systems [1]. However, due to the delicate scope of oceanographic and biological marine missions, the cumbersome hydraulic systems are overpowered in motion when tasked with preserving fragile organisms and samples.
Biological Sampling in the Deep Sea represents the first comprehensive compilation of deep-sea sampling methodologies for a range of habitats where soft robotics can assist with adaptive and preservative biological sampling [82]. Soft robotics has the potential to transform the emergence of research trends that will achieve large-scale environmental monitoring via the adaptation of compliant robot and wireless sensor network interactions, adaptive sampling, and model-aided path planning [83]. Even the defense sector benefits from maneuverable operation to ensure delicate handling of dangerous objects that are not within the scope of conventional manipulator systems. The emerging ability for soft robotic systems to operate autonomously, equipped with multi-modal sensing, makes them a favorable choice for exploration of these extreme environments [84].
Soft robots present a promising outlook for these situations by ensuring preservative handling of biological organisms and damage prevention of high-risk objects. In the following paragraphs of this section, we provide a few specific design developments of soft robotic end-effectors that have proved influential to UW soft robotics and relevant to the following section of tactile sensing technologies. A table (Table 1) has also been provided depicting some of the examples of existing soft robotic hands and their key characteristics.
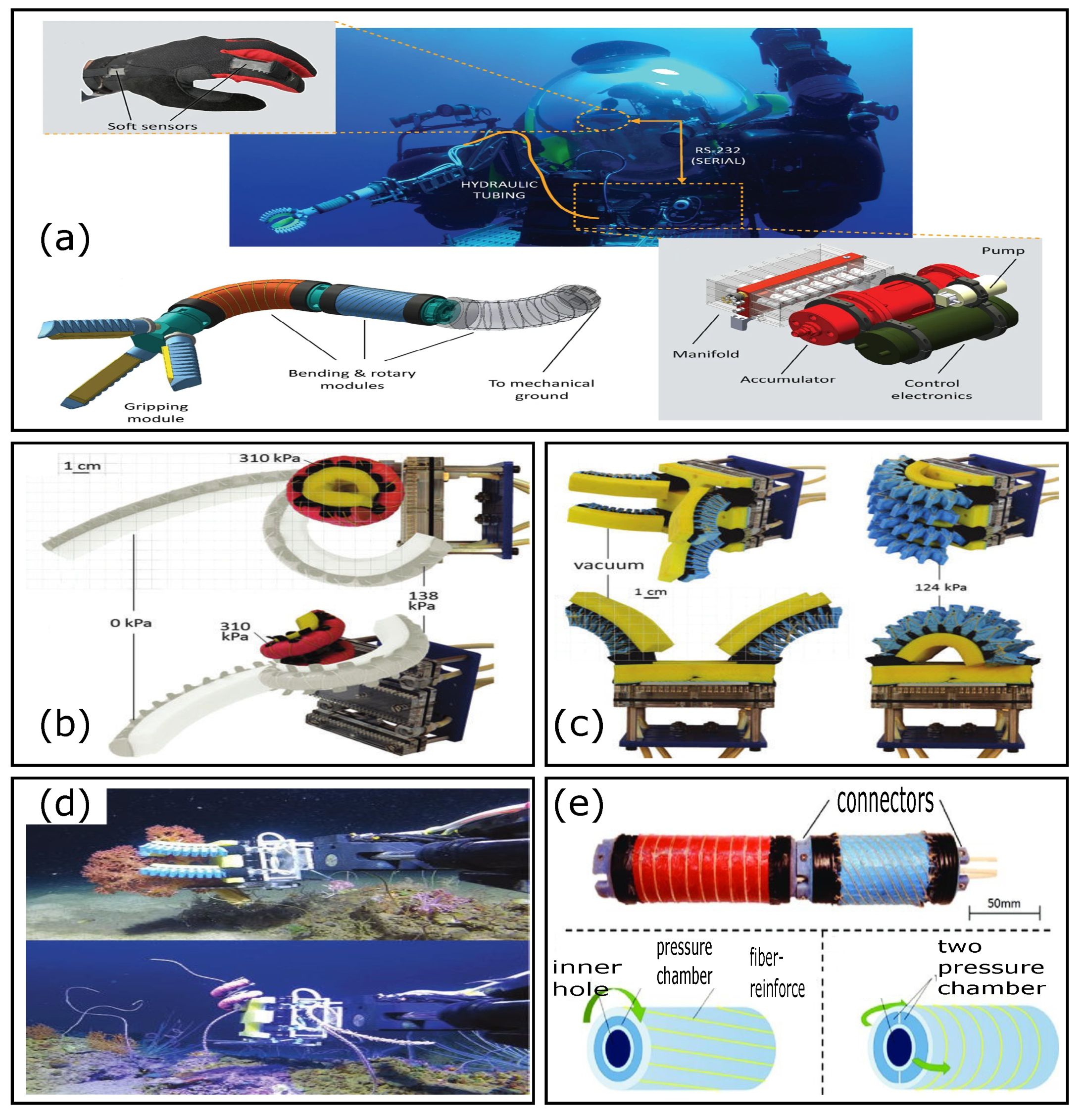
Phillips et al. designed a dexterous, tele-operable soft robotic arm that can be used for sensitive deep-sea biological exploration [85]. It utilizes seawater as hydraulic-fluid, whereas its hydraulic engine (consisting of 250 mL/min deep-sea pump and hydraulic accumulator) consumes less than 50 W of power which ensures its capability to be battery-driven. It has been field-tested to depths of 2300 m which significantly outperforms the depth of scuba diving capacity (150 m). The gripping actuator designed by Phillips et al. was inspired by the work of Galloway et al. [13], whereas rotation and bending of the Phillips control arm were inspired from technologies developed by Kurumaya et al. [86].
Galloway et al. demonstrated two types of grippers which were composed of commonly known boa-type fiber-reinforced actuators and bellow-type soft actuators, respectively [13]. The boa-type actuator utilizes a mono-pressurized fluid input contained within a molded elastomer chamber re-enforced by a spring along its length to minimize radial strain. This molded chamber is then adhered to a linear-strain limiting layer to limit unfavorable change in length along a control surface. Therefore, when the unit is pressurized, the boa-design deforms around the control surface and adapts to intricate motions such as simultaneous bend and twist [87]. When the boa’s internal fluid pressure rises, the half-round diameter actuator is able to wrap around an object of 12 mm diameter and effectively distribute forces over its surface area contact. The bellow-type actuator is similarly fabricated from a molded elastomer material, though it features a slight difference in its strain characteristics. The bellows unfolding mechanism produces less strain in the elastomer material which translates to lower operating pressure, therefore increasing the lifetime of the actuator relative to the boa. Maximum operating pressure can be enhanced in the bellow actuator by employing reinforced fibers to its construction similar to the boa [88]. One favorable characteristic to a boa-type actuator is its ability to inflate at rates as little as 50 ms. Additionally, the bellow-type actuator is able to achieve a quasi-circular shape with minimal change to volume and pressure. It is this favorable comparison to the boa-type actuator that allows the bellow-type actuator to perform over a greater lifespan with a reduced amount of fatigue and failure [88]. Similar to the boa-type and bellow-type actuator is a more traditionally recognized pleated actuator. The pleated actuator can be fabricated as both unidirectional and bi-directional. The favorable characteristic of a unidirectional pleated actuator is that it can bend to higher amounts of curvature over bellow-type or boa-type actuators. This is due to the overall displacement of fluid in the chambers. In addition, in comparison to boa-type and bellow-type actuators, a bi-directional pleated actuator can exert higher maximum force on an object due to its ability to accommodate a larger input energy [89]. It should be understood that each of these actuators are employable to undersea applications given their ease of implementation; however, the electrical power and fluid power constraints of a robot system will contribute to the output capability of the actuators.
Two more similar soft-actuator modules were developed by Kurumaya et al. The first of Kurumaya’s modules is 70 mm long and is molded from a 50 A shore hardness elastomer material, which is re-enforced with 12 outer fibers that rotate down the cross-sectional profile at a 30° increment. When actuated, this module features torsional deformation and is capable of achieving an overall angle of twist of 77° under 172 kPa of pressure. The second module is 100 mm long and is molded from a 30 A shore hardness elastomer. It is re-enforced with circular-profile fibers that are offset by 6.7 mm along the actuator’s length and when actuated can achieve bends of over 90° [86]. These two design solutions achieved by Kurumaya provide advanced capabilities for the movement of a controlled arm, whereas boa-type and bellow-type concepts developed by Galloway are favorable to end-effector’s performance and handling of an object. Figure 2 portrays the control arm and the end-effector developed by Phillips at al. with a demonstration of its UW application as well as visuals for both Galloway’s and Kurumaya’s design concepts.
Gong et al. [90,91] designed a soft robotic arm correlated with an accompanying mathematical model capable of angle correction via open-loop model-based motion control that can predict the 3D motion and location of the robotic arm with an error margin of 5.7 mm. The soft robotic arm can be operated in both air and water. The arm is based upon the concept of 3D-printed channels spatially distributed at the interface of two different silicone elastomer materials which allows for intricate 3D motions. In developing the mathematical model, Gong optimized the mechanical properties of the arm based upon a 30 A shore hardness elastomer for simulation purposes [92]. Fabrication of the soft robotic arm employed a traditional soft lithography method to compose a general cylinder shape capable of measuring changes of hydrodynamic resistance during actuation. The cylinder-shaped actuator featured a corrugated surface texture with embedded rubber tendons in order to lessen radial strain, also known as ballooning [93]. In investigating the practicality for measuring hydrodynamic resistance of the control arm, the system was tested at different depths under a range of measured amplitudes and frequencies in the open-loop model-based motion control. The Gong research team was able to conclude that small hydrodynamic forces (less than 1 N) and small torques (less than 0.08 N·m) inherent to the operation of the system translated to minor inertial effects to an accompanying underwater vehicle system as opposed to the inertial effects imposed by a rigid underwater manipulator. In calculating the inertial effects, the Gong research team employed an inverse kinematics method for three-dimensional locomotion simulation [94].
On a separate occasion, the Hao research team developed a four-fingered robotic gripper with the ability to tune, or adjust, effective finger length. Made purely of elastomer materials, the actuator hosts two working modes: (1) It can deflate soft fingers for bending one direction or opening its grip; (2) It can inflate the fingers by compressing air into its chambers. Gripper tests were performed with various finger-lengths ranging from 30 mm to 100 mm in length. In the range of tests, pull-off forces were measured for spheres and cylinders ranging from 30 mm to 90 mm diameter. The major take-away from this study was the tunable finger length design. Essentially, by modifying finger length, the actuators could perform a better grasp on certain objects [95]. The Hao research team also presented optimized parameters for bi-directional soft actuation of wedge-shaped chambers. Utilizing a simulation approach, the team performed deformation analysis on wedge shapes of different widths. Interestingly, they found that increasing the width of a chamber translated to more deformation. The research team utilized a mathematical model to reveal the deformation of the actuator as a function of geometric parameters pertaining to the internal chamber construction and material properties. Of critical findings, the team reported that incremental chamber deformation of 15° is preferable when designing larger pneumatic actuators [96].
Another soft-robotic design solution for underwater manipulation was reported by Bemfica et al. [99]. This system integrates a traditional gear-design with elastomer-based protective skin. The UW system featured a dexterous three-fingered gripper equipped with tactile sensing capabilities used to gain hold of objects of various shapes. It is reported that the three-fingered gripper is capable of securing complex objects ranging from 5 to 350 mm in diameter, whereas the palm of the manipulator has a diameter of 132 mm. The gripper, attached to a traditional robotic arm with multiple DOF, was designed to integrate with autonomous systems for submarine intervention activities [104]. Each of the three fingers individually contains two DOF and are mounted 120° apart from one another on the palm. Rotational mechanics of the fingers utilize six Faulhaber motors coupled to worm gears that are able to regulate a relationship between motor output and sampling of each tactile sensor. While this approach to manipulation is purely based on traditional robotics, the system is enclosed inside of a deformable silicone skin that protects each finger from water damage. Experimental studies of the system show prominence of its functionality but some limitations too (A simulation study of similar types of work can be found in [105]). For instance, due to material fatigue and physical interaction with hard objects, the silicon skin can be prone to cracks as well as punctures. Additionally, o-rings are required for use where the system boundaries must be maintained between different con-joining materials. Therefore, proper use of lubrication for aluminum and specific materials for o-rings is of major importance [106].
Mura et al. developed and tested a tendon-driven UW end-effector based upon the Pisa/IIT SoftHand [100,107], considering the SoftHand’s demonstrated reliability for UW use [108,109]. The Pisa/IIT SoftHand is designed as an underactuated, adaptive soft robotic hand [107]. It includes multiple flexible joints (19 joints in total). However, its specialty is that it can actuate all of those joints with just only one actuator. The hand can grasp objects having different shapes such as bottles, pens, cups, hammers, books, coins, and so on, and the design has already been proven robust in underwater use. In [108], Stuart et al. demonstrated a compliant, underactuated, tendon-driven hand (similar to Pisa/IIT Softhand). The hand is equipped with a finger-tip suction method for underwater mobile manipulation. It consists of four fingers (each driven by a single actuator) in order to perform both wrap and pinch grasp steadily. In another work of Stuart et al. [109], they reported ‘Ocean One hand’ which also uses elastic finger joints and a spring transmission to carry out various pinch and wrap grasps. A geometrically constrained torsional-spring tendon winch system is employed to switch motor actuation direction to select between two transmission stiffnesses. The two transmission stiffnesses are utilized to firmly grip an arbitrarily shaped object and execute a wide variety of tasks. The hand was employed for the field test at the La Lune shipwreck site at 91 m depth in the Mediterranean Sea and acquired a vase from that wreck. The Mura end-effector features a watertight chamber that holds its electronics and motor, as well as a set of two soft terminal devices that carry out variable grasping operations. A cast-acrylic tube and an O-ring-sealed flange are used to enclose the components inside of the watertight chamber. Magnetic coupling is used to transmit the motor torque from inside the sealed chamber to the outer underwater environment. Dust-proof, fluid-proof, and rust-proof magnetic coupling was chosen to avoid performance issues due to momentary passage of fluid over the couplings and to ensure reliability in harsh operating environments [110]. Experimental results showed that the end-effector was capable of withstanding pressures of up to 50-bar before there was any deterioration in performance or damage imposed to the system.
Recently, a 3D-printed soft robotic manipulator has been developed by Vogt et al. [101]. The soft actuator referenced here is of bellow-type and fabricated via 3D-printing utilizing thermoplastic polyurethane material, and polylactic acid (PLA) plastic material for flexible and rigid parts accordingly. Similar to how other bellow actuators work, there is a controlled bending motion. However, thin squares of rigid-flexing material are employed in an origami-like fashion to the inner control surface of the actuator. Therefore, when the bellows are pressurized, the overall bending of the actuator causes the squares of rigid material to deform in a U-like fashion and impose compression forces interior to the actuator’s grasp. Experimental data shows that this actuator is capable of pulling a maximum of 16.6 N force. The end-effector developed by Vogt et al. can be seen composed of three digits and also composed of two digits and is therefore capable of pinching and power grasps. It has been tested down to 2224 m depth and proved to effectively grasp fragile deep-sea creatures such as goniasterids and holothurians.
Sinatra et al. demonstrated an improved version of ultra-gentle soft robotic actuators that can handle sensitive samples of marine life without any imposed damage. Field tests were conducted where this actuator was able to hold species of coral and sea cucumbers without imposing damage, while it was also able to hold a jellyfish without severing its body [102]. In the Sinatra design, an actuator is built from higher shore hardness elastomer material and re-enforced with a polymer nano-fiber network for preventative means of induced strain [111], similar to the Kurumaya et al. strain-control mechanism. The Sinatra design features six actuators attached to a 3D-printed palm fabricated from a PolyJet-based printer (Objet Connex500, Stratasys). Each finger is removable from the palm and can be utilized according to its need-based case. Field tests confirm that the Sinatra’s six-finger grasp possesses a better grip and restrain of jellyfish as opposed to a four-finger grasp in a diamond shape or rectangular palm. Tests also suggest that each finger can be pressurized and depressurized up to 100 times before a failure may occur. Due to rapid pressurization or applying an input pressure above 55 kPa, a ∼1 cm inoperable tear may cause replacement of a finger. The total weight of the gripper is an impressive 123 g. The Sinatra gripper can be actuated by means of very low hydraulic pressure, ranging from 6.9 to 41.4 kPa with respect to ambient pressure.
Takeuchi et al. developed a multi-joint gripper for UW manipulation based on concepts of a differential gear chain to control the joint angle and the stiffness of a finger [112]. There are no electronics embedded in each finger and therefore the end-effector can be utilized in a variety of severe environments. Although the gripper is designed from hard materials, its differential tendon concept can be adapted to soft robotic manipulators in the future. In such a manner, the Takeuchi manipulator is a cross-breed between solid mechanics and flexible solutions which bridges a gap between force capability and flexibility.
4. Tactile Sensing Technologies
Traditional robotic use in industrial applications is based upon pre-defined and repeatable mechanical operations of the end-effectors. The tasks of robots in industry tend to be less compatible with unexpected work-frames such as UW environments. With many other challenges that define its exploration, ocean exploration is usually associated with a lack of vision leading to unclear dimensional recognition of objects. This is due to low levels of ambient light and particle-dust present to the environment but is also linked to the dimensional recognition of camera vision underwater. Thus, while soft robotic end-effectors enable manipulators to bridge the gap between expected and unknown shapes, there is still the inherent challenge of controlling these systems remotely with precision. In these situations, the use of tactile sensors leads to increased dimensional awareness that is required for acute robot control. Generally, tactile sensors can provide real-time data feedback about estimations of contact forces which lend to an analysis of structural properties. One method is based upon close-proximity force recognition utilizing an array of sensors arranged in a matrix that enables characterizing near proximal object interaction [113]. Additionally, point feature histograms (PFH) are performed in tactile sensing as a way of describing local geometry fixed about a point p for 3D point cloud data analysis. Although PFH is computation-heavy, continuous optimization of the mathematical modeling is providing enhanced object awareness known as Fast Point Feature Histograms (FPFH) [114]. Furthermore, control architecture based upon a perception-action cycle can be integrated with tactile sensing such as to allow a fingertip-like sensor to react to tactile contact whilst regulating applied contact force. By interpreting the local force data, the fingertip can be repositioned to achieve optimal manipulation [115]. Moreover, tactile sensors are able to detect the characteristics of a surface from evaluation of its texture, hardness, and even temperature to provide a more informed picture of what is happening relative to sensor data [116]. This information learned via real-time data feedback can be utilized to control fingertip contact force [117], and even to detect orthogonal surfaces or organic curvatures [118]. A more advanced topic of tactile sensing is the measurement and recognition of grasp stability. In situations of pose uncertainty, it is important to characterize object interaction both statically and dynamically. Therefore, one particular mathematical model can estimate the initial grasp stability and further re-adjust its positioning for optimal grasp. This algorithm synthesizes an adjustment based upon the estimated stability of the initial grasp [119]. A secondary method for stable grasping utilizes a break-away friction ratio (BF-ratio) which calculates the relationship between friction force and normal force during slipping. Based upon data recognition of the phenomena, a manipulator is able to re-position its grip to achieve optimal grasp. It has been experimentally proven that the performance of the BF-ratio method can moderate computational efficiency [120].
To date, an extensive range of tactile sensor technology is available that ranges depending on different types of hardware utilized to build the sensor package. For example, Teshigawara et al. developed a slip detection system built from pressure-sensitive, conductive rubber for a multi-fingered robot [121]. The slip detection system not only provides normal force recognition but also information about shear forces and slipping acting during gripping situations. Drimus et al. introduced a flexible tactile sensor package mounted to the fingers of a robotic gripper that is able to decipher between rigid and deformable materials [122]. More typical tactile sensors perform measurements by readings of capacitance and resistance but are not limited to readings of optical distribution or electric charge throughout a mechanical system [123]. Effective methods of tactile sensing can range in stretchable nature, self-healing capability, high data resolution, and sometimes possess autonomous power capability [124]. The following paragraphs will highlight a range of research-proven methods for tactile sensing and therefore support a more complete picture for the wide range of implementations seen in cutting-edge tactile sensor research today. A table (Table 2) is provided demonstrating different sensing methodologies utilized in tactile sensing and mentioning their year of reporting, material usage, functionality, sensing range, and applications.
4.1. Piezo-Electric and Piezo-Resistive Tactile Sensors
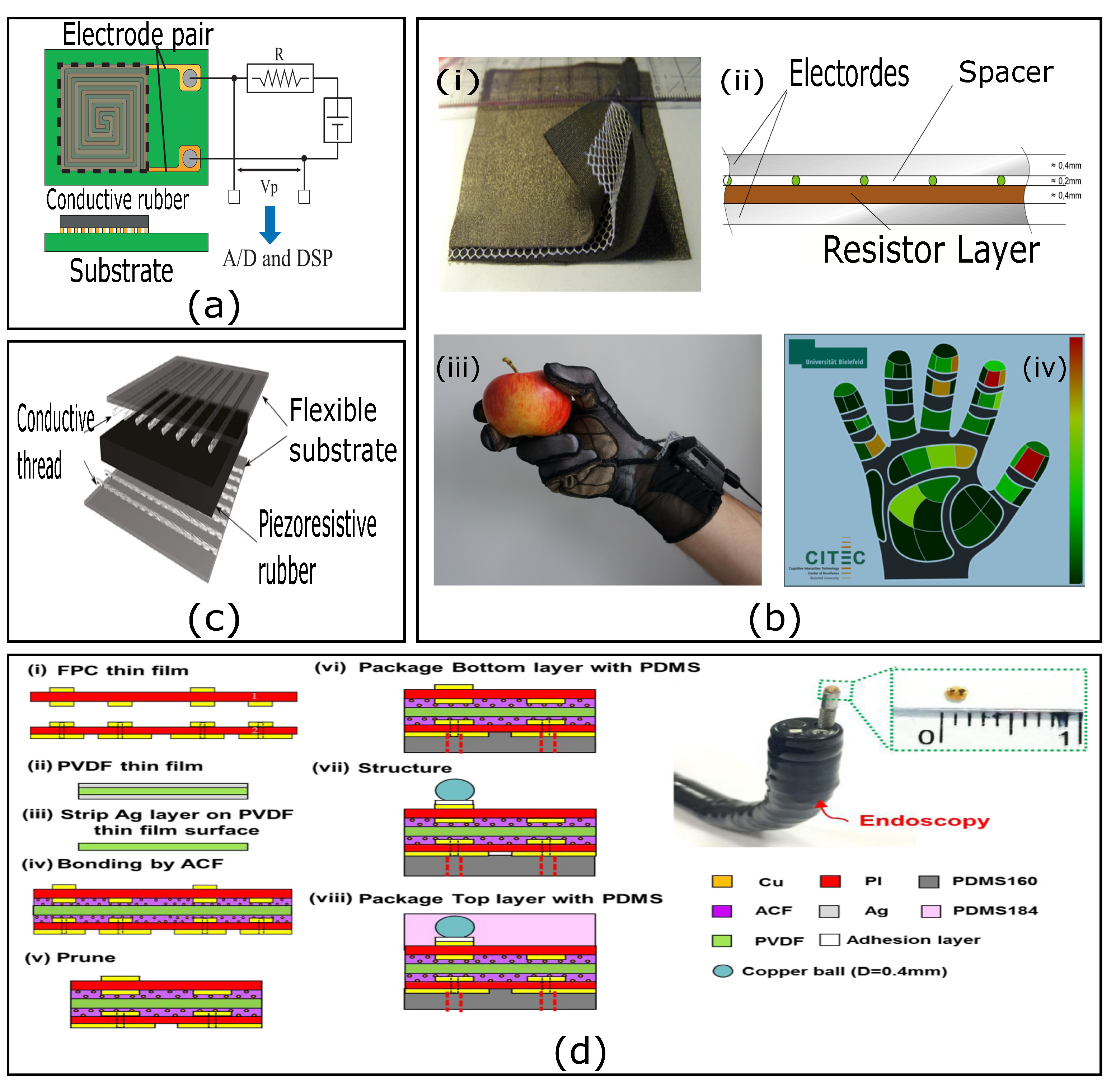
Büscher et al. demonstrated a fabric-based flexible and stretchable tactile sensor package that is capable of sensing pressure ranges between 1 kPa to 500 kPa. The system is based on piezo-resistive effects and can be employed on the surface of human-like soft skin [125]. Similar to Büscher’s piezo-resistive modeling, Seminara et al. proposed polyvinylidene fluoride (PVDF) polymer films capable of electro-mechanical characterization of piezoelectric effects in the PVDF material [126].
This method of piezoelectric modeling has shown its effectiveness in tactile sensor applications and has been further experimentally investigated by many researchers. For example, Göger et al. [127] and Chuang et al. [128] separately demonstrated the capabilities of PVDF polymer film tactile sensors based on piezoelectric and piezoresistive principles. Both Göger and Chuang incorporated dynamic and static information for an anthropomorphic robot hand. Chuang et al. also developed a piezoelectric tactile sensor for regular endoscopy to identify submucosal tumors [129]. Chuang concluded that tactile sensors modeled from piezoelectric and piezoresistive properties are generally robust but also experience some drawbacks. While the nature of piezoelectrics offers promising mechanical properties in regard to flexibility and performance under tensile strain, as well as cost-effective and repeatable manufacturing, materials used for piezoelectrics are prone to acute hysteresis. In other words, piezoelectric properties in materials tend to decrease in sensitivity over time due to wearing and tearing. Furthermore, piezoelectric properties are subject to change with ranging temperature and environmental conditions [130]. Therefore, in an underwater environment where fluctuation of temperature and pressure vary based on geographic location and depth, the piezoelectric properties of materials are subject to change. This can induce modified data reading for sensors; however, it is common for more complex underwater systems to sample the environmental conditions and adjust sensor data as a product of localized conditions. An illustration of some piezoelectric and piezoresistive tactile sensors is presented in Figure 3.

{kind=link}
{kind=link}
{kind=link}
Table 2.
Example of tactile sensors with different sensing methodologies.
| Sensing Method | References, Year | Materials Used | Functionality/ Measurement | Sensing Range | Applications |
|---|---|---|---|---|---|
| Piezo- electric & Piezo- resistive | [127], 2009 | Poly- vinylidene Fluoride (PVDF) polymer films | Normal force | - | Anthro- pomorphic robot hand |
| [128], 2013 | PVDF polymer films | Normal force | (0.1–20) N | Anthro- pomorphic robot hand | |
| [125], 2015 | Piezo- resistive fabric | Normal force | (1–500) kPa | Surface of human-like soft skin | |
| [129], 2016 | PVDF- Sensing material, Cu- Electrode | Normal force | - | Endoscopy to identify submucosal tumor | |
| Capacitive | [131], 2008 | PDMS- Structural material, Cu- Electrode | Normal, and shear force | (0–131) kPa | Artificial, or Robot hand |
| [132], 2011 | Silicone | Normal force | - | iCub Robot hand | |
| [133], 2012 | Silicone | Slip detection | - | Robotic adaptive gripper | |
| [134], 2016 | PDMS- Structural material, Au- Electrode Polystyrene- Dielectric layer | Contact, bending, and stretching forces | (0–50) N | Electronic skins, wearable robotics, and biomedical devices | |
| [135], 2018 | PDMS- Structural material, Polyamide- Dielectric layer, Ag Nanowire- Electrode | Detecting gas flow, and bending motion | - | Motion detection, health monitoring, and intelligent robots | |
| Optical Imaging | [136], 2013 | Silicone | Contact force | - | Magnetic Resonance Imaging (MRI), Minimally Invasive Surgery (MIS) |
| [137], 2018 | Silicone | Contact force | - | M2 gripper, Identifying sub-mucosal tumor | |
| [138], 2019 | PDMS | Contact force, Frequency of vibration | - | - | |
| Magnetic | [139], 2016 | Magnetic Nano- composite (Highly elastic poly- dimethyl siloxane + iron nanowires) | Vertical, and shear force | - | Braille reading |
| Organic Field Effect Transistor (OFET) | [140], 2018 | Charge modulated OFET+ PVDF | Pressure and temperature | Pressure (40–200) kPa and temperature (8–50) °C | Robotics and wearable electronics |
4.2. Capacitive Tactile Sensors
Similar to the idea of utilizing electric differential values for measurement, but different from sampling the piezoelectric resistance of materials is the idea of using capacitance readings as a means of force measurement. Lee et al. revealed a flexible tactile capacitive array based on PDMS which proved successful as an effective soft material for measuring normal and shear force distribution [131]. The PDMS elastomer serves as a useful material for flexible applications due to its high flex characteristics and low Young’s modulus. In addition, the capacitive type of sensing mechanism allows compactness of a tactile pressure sensor. While most tactile systems make use of wires, this system utilizes a serial bus for data transfer to reduce the amount of hard wiring. It was successfully tested with the humanoid robot iCub for grasping fragile objects [132]; however, the use of serial buses could impose communication issues in the underwater environment. On topic with measuring frictional and slipping forces, research reported by Heyneman addressed the concern of slippage with effective use of capacitance sensing [133]. Moreover, Li et al. [134] and Wan et al. [135] revealed a sensor package that features an impressive level of measuring precision. Reports showed that this capacitive sensor boasts pressure responsiveness of 0.815–1.2 kPa and a speedy system response time of only 36–38 ms. In this sensor package, the electrodes were positioned according to the micro-pattern of a lotus leave, while polystyrene microspheres and colorless polyimides were utilized in a dielectric layer. Applications of the emerging technology reported by Li and Wan are not limited to wearable technology, electronic skin, and soft robotics. The studies infer that capacitive tactile sensors display superior responsiveness over piezoelectric tactile sensors and consume less power when used for sensing over larger surface areas [141]. As it goes with any technology, capacitive sensing features a drawback, whereas it is vulnerable to electromagnetic noise and sensor degradation at higher temperatures.
4.3. Optical Imaging Based Tactile Sensors
Unlike the piezoelectric and capacitive solutions proposed thus far, optical imaging solutions combined with machine learning algorithms present very accurate inspection for tactile sensing. Xie et al. demonstrated the effectiveness of a vision-based optical tactile sensor used for magnetic resonance imaging (MRI) [136]. In this demonstrated technology, detailed surface texture was captured with the so-called ’Gelsight’ tactile sensor. The ’Gelsight’ is composed of an elastomer surface covered by a reflective membrane which sits above an optical camera. When forces are induced to the elastomer surface, the reflective membrane imprints with detailed geometry and reflects back to the optical camera. This high-resolution dataset is interpreted as an image, converted to a local binary pattern, and processed with a visual texture analysis tool [142]. Additionally, Johnson and Adelson have presented an optical method for capturing microscopic surface geometry. Building upon the Johnson and Adelson retrographic sensor, recent advancements to this optical sensor allow it to characterize texture regardless of surface finish whether it is matte, glossy, or transparent [143]. Of similar nature is optical sensing research reported by Cherrier et al. which merges the open-source optical sensor known as ’TacTic’ with a gripper platform named ’GR2’ in order to transduce images of deformation in the presence of manipulation [137]. The optical-sensing gripper measures forces at the fingertips by imaging a circular control surface. The control surface, containing an array of dots, deforms to certain patterns due to different types of forces. Therefore, the camera vision system captures an image of the pattern while a Bayesian algorithm processes the image for force recognition [137]. Of similar optical nature in research, Zhu et al. successfully designed a method for optical tactile sensing which bio-mimics the micro-structure of a butterfly wing which can act as a color-filter by reflecting frequencies of light based on its micro-surface pattern. Similar to the butterfly wing, Zhu et al. fabricated a grate-like frequency filter onto PDMS films [138]. When exposed to normal and shear forces, the PDMS film would slightly deform and therefore cause a change in diffracted light reflected by the frequency filter. Video magnification and optical analysis were utilized to monitor these changes whereas a machine learning algorithm was employed to predict the position and the magnitude of forces applied on the PDMS strips. Therefore, based upon the pattern present to the PDMS strips, the machine learning algorithm is able to compute information about tactile sensing [138]. In conjunction with the optical solutions proposed so far, there are fundamental advantages to using optical sensing versus piezoelectric or capacitive sensing for tactile sensing systems. Optical solutions provide very detailed spatial resolution, increased sensitivity, and high repeatability, while they are immune to electromagnetic interference [144]. Nevertheless, optical tactile sensing possesses challenging barriers to be overcome such as large power consumption and high computational requirements [145].
4.4. Other Interesting Methods for Tactile Sensing and Fusions
To this point, tactile sensing solutions provided have been purely based upon piezoelectric resistive properties, capacitive measurements, and optical imaging capabilities. These are three research areas that have been largely developed and employed in tactile sensing systems and therefore encompass a majority of research-proven solutions in the world today. As the field of material science expands and scientific understanding for materials becomes more advanced, these avenues of research will merge toward new developments and fine-tuned solutions accordingly. This is the case for quantum tunneling capabilities of a soft-material pill-shaped composite known as the QTC pill. In the piezoelectric characterization of the QTC pill, it performs as a perfect insulator but yet is able to act as an extremely good conductor [146]. Therefore, as researchers learn more about this soft material’s electro-mechanical characteristics, it possesses strong possibilities for more accurate and lower power consuming piezoelectric materials for the future. Moreover, beyond the scope of these three research avenues are tactile sensing solutions that implement the fundamentals of practical physics in novel and exciting new ways. This is the case for tunable magnetic nano-wires to express different magnetic-field properties based upon a variety of shell thickness of an iron oxide coating surrounding an iron core [139]. This magnetic tactile sensor based on magnetic nanocomposites (highly elastic polydimethylsiloxane + iron nanowires) has been used for ’Braille characters’ reading. Another example is the development of two-layer flexible artificial skin that can map a differential of surface pressure between the bottom and top layers of its construction. In such a way, force recognition is able to be monitored and processed with an associated computer algorithm [147]. These two examples for novel tactile sensing should provide a wider scope of curiosity to the reader as to what is physically and scientifically possible for future developments of tactile sensing systems.
In developing a robust tactile sensor package, it is often advantageous to merge technologies in the form of sensor fusion. In this manner, multi-modal tactile sensor packages are designed to achieve a variety of capabilities not limited to combinations of thermal, pressure, proximity and vision recognition. An example is the low-cost multi-modal tactile sensor reported by Viola et al. This very small tactile sensor functions by coupling an organic field-effect transistor (OCMFET) with a piezoelectric element fabricated from polyvinylidene difluoride (PVDF) film. It can sense variation of temperature and pressure simultaneously [140]. On a separate occasion, Hasegawa et al. has merged proximity sensors with camera vision for use as a fingertip multi-modal sensor which enabled more informed autonomous grasping [148]. Another example of a multi-modal sensor presented by Jacob Segil combines an elastomer-embedded barometric pressure sensor with an infrared proximity sensor. The combined sensor fusion is able to recognize five impact locations at three different angles of incidence. This multi-modal sensor bio-mimics somatosensory perception and is used in conjunction with peripheral nerve interfaces for prosthesis use [149]. Additionally, Kampmann et al. presented a three-fingered robot gripper equipped with a multi-modal tactile sensor integrated with optical sensors, strain gauge sensors, and piezoelectric sensors. While most optical systems tend to have a cumbersome interface, this particular sensor package boasts a minimalist design [150]. More specific to soft-robotic application, Din et al. demonstrated a photolithographic fabrication process for developing a stretchable multi-modal tactile sensor made from stretchable EcoFlex and PDMS silicon rubber encapsulation. It is capable of measuring pressure as well as measurements of uniaxial stress and strain [151].
4.5. Tactile Sensors for UW Environment
Although the use of tactile sensors for electronics and robotic systems has been extensively investigated, there is a limited number of successful implementation of tactile sensors for UW robotic applications. Table (Table 3) demonstrates some of the reported tactile sensors till now for UW environment. Previously, Brien et al. demonstrated a fingertip sensing subsystem set up for use in a dexterous underwater gripper [152]. The system consisted of a force sensor which was designed based on strain gauge technology, and a slip sensor made of a PVDF-based device. The sensing system had been successfully integrated onto a fingertip and employed underwater. The system was one of the major breakthroughs for tactile sensing in the UW environment at that time. Dennerlein et al. presented a prototype of a vibrotactile sensor that could be fabricated with minimal cost and complexity [153]. The sensor used four strips of piezo-electric film placed in a hard silicone rubber layer just beneath the jaw surface to sense the vibration. The system could effectively identify three different material blocks: wood, aluminum, and machine wax in the UW environment.
In recent years, Palli et al. developed a low-cost tactile sensor capable of measuring force and torque in the wrist unit of a 3 fingered hand-like end-effector. Encapsulated within the constraint of a cube, the multi-modal sensor can measure changes of optical reflection on the cube faces and is easily implemented into the wrist unit of an end-effector [154]. Due to its simplistic design, the opto-electronic sensor offers a reliable implementation to submersible systems where sensor fusion must remain minimal yet effective [159]. While the multi-modal sensor demonstrated effectiveness for manipulating objects like solid pipes, it is still nowhere near dexterous enough to handle soft objects like jellyfish. However, due to the sensor’s adoption of optoelectronic components, it is not subject to the effects of electromagnetic noise. Similarly, Bemfica et al. used this approach to sensing with optoelectronics in their design of a three-finger gripper for UW use [106]. Each finger digit in Bemfica’s end-effector contains three optical sensors that are contained within individual deformable pouches, all embedded in silicone. Aggarwal et al. revealed a tactile sensor capable of high spatial and force resolution which was tested in a deep-sea environment reaching ambient pressures of 600 bar [155]. The tactile sensor was mounted to an undersea end-effector named SeeGrip and proved to be effective for haptic object recognition. Due to its high spatial and force recognition capability, the SeeGrip was able to estimate more exact positions of contact forces, while contact forces were considered as point clouds which allowed for surface contact to be analyzed in terms of an object’s localized geometry [155]. Zhang et al.’s presentation of a multi-modal UW tactile sensor proved its effectiveness in localized force perception during grasping motions of a three- fingered end-effector [156]. The unit was built in the shape of an oil-filled capsule, whereas internal normally-open electrical contacts were separated by a silicone diaphragm. If either end of the capsule, which are oil-filled and deformable by nature, is subject to an outside force, the pressure is transferred internally to the capsule and displaces the silicone diaphragm. In this manner, one of the internal normally-open contacts is closed and force sensing is achieved relative to bipolar recognition. When these tactile sensors are employed to a manipulator in the form of an array, an understanding for shape recognition and localized impact forces can be realized more expansively [156]. Muscolo et al. reported an electrostatic capacitive tactile sensor potentially effective for underwater use [157]. In this sensing mechanism, a semi-cylindrical surface of flexible conductive artificial skin is separated from an array of capacitive transducers using a high dielectric oil. When outside forces are imposed on an outer soft-membrane, the conductive skin deforms closer to the transducers and creates a capacitive differential at that location. Therefore, both position and magnitude of the force can be realized from this interaction. Nadeau et al. proposed a new modality for tactile sensing: fingertip suction flow [158]. They utilized the data from monitoring orifice occlusion to sense the contact of an object and employed a recurrent neural network to predict external force trends making use of the suction signals only. The study possesses the potential for autonomous robotic behaviors and provides additional input to operators to remotely operate vehicles robustly in the UW environment. As it should be understood by the provided case studies, functional application of tactile sensing for underwater application is much harder to achieve versus above-water tactile sensing. Though some of the provided examples have not yet been tested specifically with UW soft robots, they provide influence over tactile sensing concepts that will lead to more sophisticated and robust design solutions for UW soft tactile sensing systems.
5. Prospects of UW Soft Robotics
In recent years, the field of marine robotics has undergone continuous growth as a bi-product of the increased needs for more preservative marine biological sampling, more advanced methods of ocean surveying, as well as for implementation and maintenance of ocean-based mechanical systems. First of all, sampling of marine biology and natural resources in remote undersea environments has influenced unmanned vehicles to adapt toward more acute manipulation of non-rigid and delicate objects. Second, the use-case for multi-modal sensor packages, especially those equipped with tactile sensing capabilities, allows for more accurate depictions of the UW organic environment. Lastly, delicate interactions between robot systems and undersea mechanical systems must be maintained in order to prevent damage that may otherwise be imposed by rigid robot interactions. In the case of these physical interactions, soft robot technologies particularly excel over traditional rigid-mechanics technologies due to their adaptive and preservative nature for manipulation. Thus, there is a wide scope of advantage that soft robots can exhibit in their role of more adaptive ocean exploration. The following are the state of the art of soft robotic technologies for UW applications that point toward advancements for the future of soft robotic systems in ocean exploration.
Katzschmann et al. introduced an acoustically controlled soft robotic fish [160]. The robot is equipped with cameras, which are controlled by a remote human operator, and can perform more organic swimming maneuvers. The scope of this soft-robot is to provide opportunities for marine researchers to investigate the interactions of aquatic life more closely while imposing less of a visual threat to marine animals as opposed to traditional remotely operated undersea vehicles. Picardi et al. developed a legged robot named SILVER-2 that is inspired by benthic animals like crabs and lobsters [161]. The robot consists of both soft and rigid parts and is currently able to explore sea bed constraints between 0.5–12 m depth. Enhancing the SILVER-2’s depth capabilities would be a huge step forward in seabed exploration as well as the implementation of soft tactile sensing to its design.
Of additional pertinence to emerging UW soft robotic technology is experimentation with different types of SMAs as artificial muscles to mimic jellyfish locomotion. Particularly, hydrogen and oxygen-powered SMAs are composed of nano-platinum catalyst-coated multi-wall carbon nanotube (MWCNT) sheets that are wrapped around the surface of Nickel-Titanium (NiTi). When a mixture of naturally occurring hydrogen and oxygen contact the NiTi surface, an exothermic reaction causes specific heat transfer to result in mechanical deformation. This type of SMA is favorable because the hydrogen–oxygen fuel source could potentially provide higher power density than electrical sources [162]. Additionally, bi-directional SMAs are presenting the capability for artificial muscles to return to their original position without any induced strain. Typical unidirectional SMAs are only able to actuate in one direction upon heating; however, the influence of bi-directional SMAs will allow for artificial muscle systems to exhibit repeatable cyclic motion, further mimicking jellyfish locomotion [163]. On a related note, new studies based upon pulse and recovery deformation of ionic polymer metal composites are under investigation. Similar to the NiTi SMA previously referenced, excitation of the material composition causes favorable deformation; however, the power source in this scenario is an electrical signal pulse [164]. Of a similar type of application, controlled motion of magnetic composite elastomer material in the presence of an external oscillating magnetic field can induce fluidic flow that translates to organic movement throughout the soft robot materials [42].
The bio-mimicry of jellyfish locomotion is especially relevant to advancements of underwater robots due to the principle of propulsion relevant to external environmental stimulus. There are, however, inherent challenges to designing functional jelly-like systems. These challenges usually present themselves in the form of encapsulation of electrodes in ultra-soft materials. As seen in research thus far, it has been difficult to implement compliant electrode materials that conform to pre-strained dielectric layers as well as to insulate actuator electrodes from surrounding fluids. One recent design advancement to dielectric elastomer actuators (DEA) is providing a positive outlook to submersible DEA technology. This development features an internal fluid-filled chamber, where the internal fluid acts as one electrode while the liquid of the surrounding environment acts as the second electrode. By implementing this strategy the interactions between electrodes are simplified [165]. Additionally, advancements in polyrotaxane actuator technology are providing insight into molecular-sized machine elements acting as piston–cylinders, valves, and pumps. These types of molecular machines operate via idiosyncratic classes of molecular structure joined via non-covalent mechanical interactions. The interactions between the molecules are unlocking various techniques for implementing supramolecular structures into new hybrid materials that are able to achieve mechanical stimuli-responses without separation [166]. In applications where encapsulating electrode networks is crucial, this type of interlinked molecular architecture possesses tremendous outlook for future development. In addition, impressive behavior featured by advancements to DEA actuators is the ability to facilitate movement via a silent mode of operation. Traditional undersea robots rely upon propeller actuation which requires cumbersome mechanics and creates a great deal of noise and disturbance [167]. Emerging designs for DEAs have encapsulated un-tethered power sources such as batteries which can provide ample power for di-electric induced methods of movement [168]. In these types of systems, the flexible DEAs are able to produce locomotive movements without causing any sound disturbance or creating much unwanted turbulence. Based upon this type of DEA design, a fish robot was able to swim silently at a speed of 8 mm/s with a 3 kV drive voltage, whereas a jellyfish robot was able to silently move at a rate of 1.5 mm/s [169].
Continuous progress on developing novel methodologies and tuning prior conventional systems to conform with silent, low-power, jelly-like systems remain under great concentration [103], especially lending itself to emerging swarm capabilities. The idea for multi-robot control is becoming more prevalant in UW applications, whereas it is more efficient to make use of multiple robots working together to perform a common task or different tasks simultaneously rather than relying on one robot to handle all responsibilities incrementally [170]. Furthermore, in the advent of more practical and creative manufacturing solutions for advanced materials and sensing technologies, soft robotic solutions will continue to adapt to challenging environmental conditions in the UW world.
6. Conclusions
Soft robotics has brought a quantum leap in the field of robotics and manifests its prospects to revolutionizing society and industries that require compliant robot interfacing. Beginning with a discussion of the history of soft robots that emerged from the need for more adaptive systems, this review outlines the field of soft robotics that has emerged to reveal more distinct robotic solutions that are both compliant and acute in the nature of control. With any technology, however, some challenges remain inherent to its very nature, whereas continued development in the field of soft robotics is crucial to realize more intellectual and pragmatic systems, especially with respect to the UW environment. To this degree, several applications of soft robotic UW end-effectors were provided and analyzed in terms of functionality and limitations. Additional critical focuses of this review were concepts of tactile sensing and their integration as multi-modal sensing packages for enhanced awareness of manipulation. In formulating this development, prospects of tactile sensing were fused with soft-based underwater end-effectors to reveal early research stages of soft undersea tactile sensing systems. As a final note of current research, the novel applications of bio-mimicry based on complex UW soft-physique creatures were presented. In addition, this review is expected to play a role of bridging new cutting-edge manufacturing solutions and influences of emerging material science methods that have the potential to make the field of soft robotics more accessible and more advanced in its domain. While there are inherent challenges of soft robotics that include stretchable material restrictions to conform with di-electrics as one example, continued advancements in technologies and materials will likely resolve these hurdles leading to more advanced soft robots. This is especially true for the UW environment. Therefore, future advancements to soft robotic systems possess tremendous potential to transform the field of ocean exploration, with a special emphasis on preservative interactions with foreign objects of complex nature without imposing damage upon them. As a fusion between mechanics and software modeling, soft robot mechanical systems will continue to be conjoined with deterministic artificial intelligence that will allow for autonomous vehicle exploration to approach refined levels of countermeasure.
Author Contributions
Conceptualization, K.P. and R.A.S.I.S.; writing—original draft preparation, R.A.S.I.S., L.B.C.; writing—review and editing, L.B.C., K.P.; supervision, K.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research work is supported by UMass Dartmouth’s Marine and Undersea Technology (MUST) Research Program funded by the Office of Naval Research (ONR) under Grant No. N00014-20-1-2170.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Whitcomb, L.L. Underwater robotics: Out of the research laboratory and into the field. In Proceedings of the 2000 ICRA. Millennium Conference, IEEE International Conference on Robotics and Automation, Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 709–716. [Google Scholar]
- Yuh, J. Development in underwater robotics. In Proceedings of the 1995 IEEE International Conference on Robotics and Automation, Nagoya, Japan, 21–27 May 1995; Volume 2, pp. 1862–1867. [Google Scholar]
- Robison, B.H. The coevolution of undersea vehicles and deep-sea research. Mar. Technol. Soc. J. 1999, 33, 65–73. [Google Scholar] [CrossRef]
- Yoerger, D.R.; Bradley, A.M.; Jakuba, M.; German, C.R.; Shank, T.; Tivey, M. Autonomous and remotely operated vehicle technology for hydrothermal vent discovery, exploration, and sampling. Oceanography 2007, 20, 152–161. [Google Scholar] [CrossRef] [Green Version]
- Kalwa, J.; Pascoal, A.; Ridao, P.; Birk, A.; Eichhorn, M.; Brignone, L.; Caccia, M.; Alves, J.; Santos, R. The European R&D-Project MORPH: Marine robotic systems of self-organizing, logically linked physical nodes. IFAC Proc. Vol. 2012, 45, 226–231. [Google Scholar]
- Ridao, P.; Carreras, M.; Ribas, D.; Garcia, R. Visual inspection of hydroelectric dams using an autonomous underwater vehicle. J. Field Robot. 2010, 27, 759–778. [Google Scholar] [CrossRef] [Green Version]
- Marani, G.; Choi, S.K.; Yuh, J. Underwater autonomous manipulation for intervention missions AUVs. Ocean. Eng. 2009, 36, 15–23. [Google Scholar] [CrossRef]
- Albu-Schaffer, A.; Eiberger, O.; Grebenstein, M.; Haddadin, S.; Ott, C.; Wimbock, T.; Wolf, S.; Hirzinger, G. Soft robotics. IEEE Robot. Autom. Mag. 2008, 15, 20–30. [Google Scholar] [CrossRef]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef] [PubMed]
- Laschi, C.; Rossiter, J.; Iida, F.; Cianchetti, M.; Margheri, L. Soft Robotics: Trends, Applications and Challenges; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, 1–11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Giorgio-Serchi, F.; Weymouth, G.D. Underwater soft robotics, the benefit of body-shape variations in aquatic propulsion. In Soft Robotics: Trends, Applications and Challenges; Springer: Berlin/Heidelberg, Germany, 2017; pp. 37–46. [Google Scholar]
- Galloway, K.C.; Becker, K.P.; Phillips, B.; Kirby, J.; Licht, S.; Tchernov, D.; Wood, R.J.; Gruber, D.F. Soft robotic grippers for biological sampling on deep reefs. Soft Robot. 2016, 3, 23–33. [Google Scholar] [CrossRef] [PubMed]
- Aggarwal, A.; Kirchner, F. Object recognition and localization: The role of tactile sensors. Sensors 2014, 14, 3227–3266. [Google Scholar] [CrossRef] [Green Version]
- Martinez-Hernandez, U. Tactile sensors. In Scholarpedia of Touch; Springer: Berlin/Heidelberg, Germany, 2016; pp. 783–796. [Google Scholar]
- Shiva, A.; Stilli, A.; Noh, Y.; Faragasso, A.; De Falco, I.; Gerboni, G.; Cianchetti, M.; Menciassi, A.; Althoefer, K.; Wurdemann, H.A. Tendon-based stiffening for a pneumatically actuated soft manipulator. IEEE Robot. Autom. Lett. 2016, 1, 632–637. [Google Scholar] [CrossRef] [Green Version]
- Saigo, H.; Naruse, M.; Okamura, K.; Hori, H.; Ojima, I. Analysis of soft robotics based on the concept of category of mobility. Complexity 2019, 1–12. [Google Scholar] [CrossRef]
- Whitesides, G.M. Soft robotics. Angew. Chem. Int. Ed. 2018, 57, 4258–4273. [Google Scholar] [CrossRef] [PubMed]
- Corley, A.M. iRobot’s Shape-Shifting Blob ’Bot Takes Its First Steps. 2009. Available online: https://https://spectrum.ieee.org/automaton/robotics/robotics-software/irobot-soft-morphing-blob-chembot (accessed on 20 May 2021).
- Trivedi, D.; Rahn, C.D.; Kier, W.M.; Walker, I.D. Soft robotics: Biological inspiration, state of the art, and future research. Appl. Bionics Biomech. 2008, 5, 99–117. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [Green Version]
- Duriez, C.; Bieze, T. Soft robot modeling, simulation and control in real-time. In Soft Robotics: Trends, Applications and Challenges; Springer: Berlin/Heidelberg, Germany, 2017; pp. 103–109. [Google Scholar]
- Ilievski, F.; Mazzeo, A.D.; Shepherd, R.F.; Chen, X.; Whitesides, G.M. Soft robotics for chemists. Angew. Chem. Int. Ed. 2011, 50, 1890–1895. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Li, C.; Cho, M.; Ahn, S.H. Soft tendril-inspired grippers: Shape morphing of programmable polymer–paper bilayer composites. ACS Appl. Mater. Interfaces 2018, 10, 10419–10427. [Google Scholar] [CrossRef] [PubMed]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403. [Google Scholar] [CrossRef] [Green Version]
- Byun, J.; Lee, Y.; Yoon, J.; Lee, B.; Oh, E.; Chung, S.; Lee, T.; Cho, K.J.; Kim, J.; Hong, Y. Electronic skins for soft, compact, reversible assembly of wirelessly activated fully soft robots. Sci. Robot. 2018, 3, eaas9020. [Google Scholar] [CrossRef] [Green Version]
- Koivikko, A.; Raei, E.S.; Mosallaei, M.; Mäntysalo, M.; Sariola, V. Screen-printed curvature sensors for soft robots. IEEE Sens. J. 2017, 18, 223–230. [Google Scholar] [CrossRef]
- Zhao, H.; O’Brien, K.; Li, S.; Shepherd, R.F. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides. Sci. Robot. 2016, 1, eaai7529. [Google Scholar] [CrossRef] [Green Version]
- Connolly, F.; Walsh, C.J.; Bertoldi, K. Automatic design of fiber-reinforced soft actuators for trajectory matching. Proc. Natl. Acad. Sci. USA 2017, 114, 51–56. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pawlowski, B.; Sun, J.; Xu, J.; Liu, Y.; Zhao, J. Modeling of soft robots actuated by twisted-and-coiled actuators. IEEE/ASME Trans. Mechatron. 2018, 24, 5–15. [Google Scholar] [CrossRef]
- Mitchell, S.K.; Wang, X.; Acome, E.; Martin, T.; Ly, K.; Kellaris, N.; Venkata, V.G.; Keplinger, C. An Easy-to-Implement Toolkit to Create Versatile and High-Performance HASEL Actuators for Untethered Soft Robots. Adv. Sci. 2019, 6, 1900178. [Google Scholar] [CrossRef] [Green Version]
- Sumbre, G.; Fiorito, G.; Flash, T.; Hochner, B. Octopuses use a human-like strategy to control precise point-to-point arm movements. Curr. Biol. 2006, 16, 767–772. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Onal, C.D.; Chen, X.; Whitesides, G.M.; Rus, D. Soft mobile robots with on-board chemical pressure generation. In Robotics Research; Springer: Berlin/Heidelberg, Germany, 2017; pp. 525–540. [Google Scholar]
- Shintake, J.; Sonar, H.; Piskarev, E.; Paik, J.; Floreano, D. Soft pneumatic gelatin actuator for edible robotics. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 6221–6226. [Google Scholar]
- Zinn, M.; Khatib, O.; Roth, B.; Salisbury, J.K. Actuation methods for human-centered robotics and associated control challenges. In Control Problems in Robotics; Springer: Berlin/Heidelberg, Germany, 2003; pp. 105–119. [Google Scholar]
- da Cunha, M.P.; Debije, M.G.; Schenning, A.P. Bioinspired light-driven soft robots based on liquid crystal polymers. Chem. Soc. Rev. 2020, 49, 6568–6578. [Google Scholar] [CrossRef]
- Rogóż, M.; Zeng, H.; Xuan, C.; Wiersma, D.S.; Wasylczyk, P. Light-driven soft robot mimics caterpillar locomotion in natural scale. Adv. Opt. Mater. 2016, 4, 1689–1694. [Google Scholar] [CrossRef]
- Zeng, H.; Wani, O.M.; Wasylczyk, P.; Priimagi, A. Light-driven, caterpillar-inspired miniature inching robot. Macromol. Rapid Commun. 2018, 39, 1700224. [Google Scholar] [CrossRef] [PubMed]
- Rogóż, M.; Dradrach, K.; Xuan, C.; Wasylczyk, P. A Millimeter-Scale Snail Robot Based on a Light-Powered Liquid Crystal Elastomer Continuous Actuator. Macromol. Rapid Commun. 2019, 40, 1900279. [Google Scholar] [CrossRef] [PubMed]
- Yamada, M.; Kondo, M.; Miyasato, R.; Naka, Y.; Mamiya, J.I.; Kinoshita, M.; Shishido, A.; Yu, Y.; Barrett, C.J.; Ikeda, T. Photomobile polymer materials—Various three-dimensional movements. J. Mater. Chem. 2009, 19, 60–62. [Google Scholar] [CrossRef]
- Li, G.; Chen, X.; Zhou, F.; Liang, Y.; Xiao, Y.; Cao, X.; Zhang, Z.; Zhang, M.; Wu, B.; Yin, S.; et al. Self-powered soft robot in the Mariana Trench. Nature 2021, 591, 66–71. [Google Scholar] [CrossRef]
- Ren, Z.; Hu, W.; Dong, X.; Sitti, M. Multi-functional soft-bodied jellyfish-like swimming. Nat. Commun. 2019, 10, 1–12. [Google Scholar] [CrossRef]
- Nagaoka, T.; Mao, Z.; Takemura, K.; Yokota, S.; Kim, J.w. ECF (electro-conjugate fluid) finger with bidirectional motion and its application to a flexible hand. Smart Mater. Struct. 2019, 28, 025032. [Google Scholar] [CrossRef]
- Elsayed, Y.; Lekakou, C.; Geng, T.; Saaj, C.M. Design optimisation of soft silicone pneumatic actuators using finite element analysis. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besacon, France, 8–11 July 2014; pp. 44–49. [Google Scholar]
- Wakimoto, S.; Suzumori, K.; Ogura, K. Miniature pneumatic curling rubber actuator generating bidirectional motion with one air-supply tube. Adv. Robot. 2011, 25, 1311–1330. [Google Scholar] [CrossRef] [Green Version]
- Paek, J.; Cho, I.; Kim, J. Microrobotic tentacles with spiral bending capability based on shape-engineered elastomeric microtubes. Sci. Rep. 2015, 5, 10768. [Google Scholar] [CrossRef]
- Lee, D.Y.; Koh, J.S.; Kim, J.S.; Kim, S.W.; Cho, K.J. Deformable-wheel robot based on soft material. Int. J. Precis. Eng. Manuf. 2013, 14, 1439–1445. [Google Scholar] [CrossRef]
- Huynh, T.P.; Sonar, P.; Haick, H. Advanced materials for use in soft self-healing devices. Adv. Mater. 2017, 29, 1604973. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rueben, J.; Walker, S.; Huhn, S.; Simonsen, J.; Mengüç, Y. Developing a UV-Curable, Environmentally Benign and Degradable Elastomer for Soft Robotics. MRS Adv. 2018, 3, 1551–1556. [Google Scholar] [CrossRef]
- Hoang, T.T.; Phan, P.T.; Thai, M.T.; Lovell, N.H.; Do, T.N. Bio-Inspired Conformable and Helical Soft Fabric Gripper with Variable Stiffness and Touch Sensing. Adv. Mater. Technol. 2020, 5, 2000724. [Google Scholar] [CrossRef]
- Merz, R.; Prinz, F.; Ramaswami, K.; Terk, M.; Weiss, L. Shape deposition manufacturing. In Proceedings of the 1994 International Solid Freeform Fabrication Symposium, Austin, TX, USA, 8–10 August 1994; The University of Texas at Austin: Austin, TX, USA, 1994. [Google Scholar]
- Cham, J.G.; Bailey, S.A.; Clark, J.E.; Full, R.J.; Cutkosky, M.R. Fast and robust: Hexapedal robots via shape deposition manufacturing. Int. J. Robot. Res. 2002, 21, 869–882. [Google Scholar] [CrossRef]
- Cho, K.J.; Koh, J.S.; Kim, S.; Chu, W.S.; Hong, Y.; Ahn, S.H. Review of manufacturing processes for soft biomimetic robots. Int. J. Precis. Eng. Manuf. 2009, 10, 171–181. [Google Scholar] [CrossRef]
- Yang, D.; Verma, M.S.; Thus, J.H.; Mosadegh, B.; Keplinger, C.; Lee, B.; Khashai, F.; Lossner, E.; Suo, Z.; Whitesides, G.M. Buckling pneumatic linear actuators inspired by muscle. Adv. Mater. Technol. 2016, 1, 1600055. [Google Scholar] [CrossRef]
- Hawkes, E.; An, B.; Benbernou, N.M.; Tanaka, H.; Kim, S.; Demaine, E.D.; Rus, D.; Wood, R.J. Programmable matter by folding. Proc. Natl. Acad. Sci. USA 2010, 107, 12441–12445. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Koh, J.S.; Cho, K.J. Omegabot: Biomimetic inchworm robot using SMA coil actuator and smart composite microstructures (SCM). In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 1154–1159. [Google Scholar]
- Yap, H.K.; Ng, H.Y.; Yeow, C.H. High-force soft printable pneumatics for soft robotic applications. Soft Robot. 2016, 3, 144–158. [Google Scholar] [CrossRef]
- MacCurdy, R.; Katzschmann, R.; Kim, Y.; Rus, D. Printable hydraulics: A method for fabricating robots by 3D co-printing solids and liquids. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3878–3885. [Google Scholar]
- Truby, R.L.; Wehner, M.; Grosskopf, A.K.; Vogt, D.M.; Uzel, S.G.; Wood, R.J.; Lewis, J.A. Soft somatosensitive actuators via embedded 3D printing. Adv. Mater. 2018, 30, 1706383. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Patel, D.K.; Sakhaei, A.H.; Layani, M.; Zhang, B.; Ge, Q.; Magdassi, S. Highly stretchable and UV curable elastomers for digital light processing based 3D printing. Adv. Mater. 2017, 29, 1606000. [Google Scholar] [CrossRef]
- Robertson, M.A.; Sadeghi, H.; Florez, J.M.; Paik, J. Soft pneumatic actuator fascicles for high force and reliability. Soft Robot. 2017, 4, 23–32. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, H.T.; Leisk, G.G.; Trimmer, B. GoQBot: A caterpillar-inspired soft-bodied rolling robot. Bioinspiration Biomimetics 2011, 6, 026007. [Google Scholar] [CrossRef] [PubMed]
- Seok, S.; Onal, C.D.; Cho, K.J.; Wood, R.J.; Rus, D.; Kim, S. Meshworm: A peristaltic soft robot with antagonistic nickel titanium coil actuators. IEEE/ASME Trans. Mechatron. 2012, 18, 1485–1497. [Google Scholar] [CrossRef]
- Wang, W.; Lee, J.Y.; Rodrigue, H.; Song, S.H.; Chu, W.S.; Ahn, S.H. Locomotion of inchworm-inspired robot made of smart soft composite (SSC). Bioinspir. Biomim. 2014, 9, 046006. [Google Scholar] [CrossRef]
- Tolley, M.T.; Shepherd, R.F.; Mosadegh, B.; Galloway, K.C.; Wehner, M.; Karpelson, M.; Wood, R.J.; Whitesides, G.M. A resilient, untethered soft robot. Soft Robot. 2014, 1, 213–223. [Google Scholar] [CrossRef]
- Katzschmann, R.K.; Marchese, A.D.; Rus, D. Hydraulic autonomous soft robotic fish for 3D swimming. In Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 405–420. [Google Scholar]
- Renda, F.; Giorgio-Serchi, F.; Boyer, F.; Laschi, C. Locomotion and elastodynamics model of an underwater shell-like soft robot. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 1158–1165. [Google Scholar]
- Majidi, C. Soft robotics: A perspective—Current trends and prospects for the future. Soft Robot. 2014, 1, 5–11. [Google Scholar] [CrossRef]
- Majidi, C. Soft-Matter Engineering for Soft Robotics. Adv. Mater. Technol. 2019, 4, 1800477. [Google Scholar] [CrossRef] [Green Version]
- Campo, D.V.Y.M.A.; Valentine, A.D.; Walsh, C.J.; Lewis, J.A.; Frutiger, A.; Muth, J.T. Capacitive Soft Strain Sensors via Multicore–Shell Fiber Printing. Adv. Mater. 2015, 27, 2440–2446. [Google Scholar]
- Lu, N.; Lu, C.; Yang, S.; Rogers, J. Highly sensitive skin-mountable strain gauges based entirely on elastomers. Adv. Funct. Mater. 2012, 22, 4044–4050. [Google Scholar] [CrossRef]
- Keplinger, C.; Sun, J.Y.; Foo, C.C.; Rothemund, P.; Whitesides, G.M.; Suo, Z. Stretchable, transparent, ionic conductors. Science 2013, 341, 984–987. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jang, K.I.; Li, K.; Chung, H.U.; Xu, S.; Jung, H.N.; Yang, Y.; Kwak, J.W.; Jung, H.H.; Song, J.; Yang, C.; et al. Self-assembled three-dimensional network designs for soft electronics. Nat. Commun. 2017, 8, 1–10. [Google Scholar] [CrossRef]
- Atalay, A.; Sanchez, V.; Atalay, O.; Vogt, D.M.; Haufe, F.; Wood, R.J.; Walsh, C.J. Batch fabrication of customizable silicone-textile composite capacitive strain sensors for human motion tracking. Adv. Mater. Technol. 2017, 2, 1700136. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Xu, J.; Wang, W.; Wang, G.J.N.; Rastak, R.; Molina-Lopez, F.; Chung, J.W.; Niu, S.; Feig, V.R.; Lopez, J.; et al. Skin electronics from scalable fabrication of an intrinsically stretchable transistor array. Nature 2018, 555, 83–88. [Google Scholar] [CrossRef] [PubMed]
- Hosoda, K.; Tada, Y.; Asada, M. Anthropomorphic robotic soft fingertip with randomly distributed receptors. Robot. Auton. Syst. 2006, 54, 104–109. [Google Scholar] [CrossRef]
- George Thuruthel, T.; Ansari, Y.; Falotico, E.; Laschi, C. Control strategies for soft robotic manipulators: A survey. Soft Robot. 2018, 5, 149–163. [Google Scholar] [CrossRef]
- Chalon, M.; Wedler, A.; Baumann, A.; Bertleff, W.; Beyer, A.; Butterfaß, J.; Grebenstein, M.; Gruber, R.; Hacker, F.; Kraemer, E. Dexhand: A space qualified multi-fingered robotic hand. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2204–2210. [Google Scholar]
- Wang, S.; Jiang, H.; Myung Huh, T.; Sun, D.; Ruotolo, W.; Miller, M.; Roderick, W.R.; Stuart, H.S.; Cutkosky, M.R. Spinyhand: Contact load sharing for a human-scale climbing robot. J. Mech. Robot. 2019, 11. [Google Scholar] [CrossRef] [Green Version]
- Ruotolo, W.; Roig, F.S.; Cutkosky, M.R. Load-sharing in soft and spiny paws for a large climbing robot. IEEE Robot. Autom. Lett. 2019, 4, 1439–1446. [Google Scholar] [CrossRef]
- Laschi, C. Octobot-A robot octopus points the way to soft robotics. IEEE Spectr. 2017, 54, 38–43. [Google Scholar] [CrossRef]
- Kelley, C.; Kerby, T.; Sarradin, P.M.; Sarrazin, J.; Lindsay, D.J. Submersibles and remotely operated vehicles. In Biological Sampling in the Deep Sea; John Wiley & Sons: New York, NY, USA, 2016; pp. 285–305. [Google Scholar]
- Dunbabin, M.; Marques, L. Robots for environmental monitoring: Significant advancements and applications. IEEE Robot. Autom. Mag. 2012, 19, 24–39. [Google Scholar] [CrossRef]
- Wynn, R.B.; Huvenne, V.A.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous Underwater Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef] [Green Version]
- Phillips, B.T.; Becker, K.P.; Kurumaya, S.; Galloway, K.C.; Whittredge, G.; Vogt, D.M.; Teeple, C.B.; Rosen, M.H.; Pieribone, V.A.; Gruber, D.F.; et al. A dexterous, glove-based teleoperable low-power soft robotic arm for delicate deep-sea biological exploration. Sci. Rep. 2018, 8, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Kurumaya, S.; Phillips, B.T.; Becker, K.P.; Rosen, M.H.; Gruber, D.F.; Galloway, K.C.; Suzumori, K.; Wood, R.J. A modular soft robotic wrist for underwater manipulation. Soft Robot. 2018, 5, 399–409. [Google Scholar] [CrossRef]
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft robotic glove for combined assistance and at-home rehabilitation. Robot. Auton. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef] [Green Version]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.F.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, G.M. Pneumatic networks for soft robotics that actuate rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170. [Google Scholar] [CrossRef]
- Marchese, A.D.; Katzschmann, R.K.; Rus, D. A recipe for soft fluidic elastomer robots. Soft Robot. 2015, 2, 7–25. [Google Scholar] [CrossRef] [Green Version]
- Gong, Z.; Cheng, J.; Chen, X.; Sun, W.; Fang, X.; Hu, K.; Xie, Z.; Wang, T.; Wen, L. A bio-inspired soft robotic arm: Kinematic modeling and hydrodynamic experiments. J. Bionic Eng. 2018, 15, 204–219. [Google Scholar] [CrossRef]
- Gong, Z.; Fang, X.; Chen, X.; Cheng, J.; Xie, Z.; Liu, J.; Chen, B.; Yang, H.; Kong, S.; Hao, Y.; et al. A soft manipulator for efficient delicate grasping in shallow water: Modeling, control, and real-world experiments. Int. J. Robot. Res. 2021, 40, 449–469. [Google Scholar] [CrossRef]
- Gong, Z.; Xie, Z.; Yang, X.; Wang, T.; Wen, L. Design, fabrication and kinematic modeling of a 3D-motion soft robotic arm. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 509–514. [Google Scholar]
- Morin, S.A.; Shepherd, R.F.; Kwok, S.W.; Stokes, A.A.; Nemiroski, A.; Whitesides, G.M. Camouflage and display for soft machines. Science 2012, 337, 828–832. [Google Scholar] [CrossRef] [Green Version]
- Gong, Z.; Cheng, J.; Hu, K.; Wang, T.; Wen, L. An inverse kinematics method of a soft robotic arm with three-dimensional locomotion for underwater manipulation. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 516–521. [Google Scholar]
- Hao, Y.; Gong, Z.; Xie, Z.; Guan, S.; Yang, X.; Ren, Z.; Wang, T.; Wen, L. Universal soft pneumatic robotic gripper with variable effective length. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 6109–6114. [Google Scholar]
- Hao, Y.; Wang, T.; Ren, Z.; Gong, Z.; Wang, H.; Yang, X.; Guan, S.; Wen, L. Modeling and experiments of a soft robotic gripper in amphibious environments. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417707148. [Google Scholar] [CrossRef]
- Walker, I.D.; Dawson, D.M.; Flash, T.; Grasso, F.W.; Hanlon, R.T.; Hochner, B.; Kier, W.M.; Pagano, C.C.; Rahn, C.D.; Zhang, Q.M. Continuum robot arms inspired by cephalopods. In Unmanned Ground Vehicle Technology VII; International Society for Optics and Photonics: Bellingham, WA, USA, 2005; Volume 5804, pp. 303–314. [Google Scholar]
- Cianchetti, M.; Arienti, A.; Follador, M.; Mazzolai, B.; Dario, P.; Laschi, C. Design concept and validation of a robotic arm inspired by the octopus. Mater. Sci. Eng. 2011, 31, 1230–1239. [Google Scholar] [CrossRef]
- Bemfica, J.; Melchiorri, C.; Moriello, L.; Palli, G.; Scarcia, U.; Vassura, G. Mechatronic design of a three-fingered gripper for underwater applications. IFAC Proc. Vol. 2013, 46, 307–312. [Google Scholar] [CrossRef]
- Mura, D.; Barbarossa, M.; Dinuzzi, G.; Grioli, G.; Caiti, A.; Catalano, M.G. A soft modular end effector for underwater manipulation: A gentle, adaptable grasp for the ocean depths. IEEE Robot. Autom. Mag. 2018, 25, 45–56. [Google Scholar] [CrossRef]
- Vogt, D.M.; Becker, K.P.; Phillips, B.T.; Graule, M.A.; Rotjan, R.D.; Shank, T.M.; Cordes, E.E.; Wood, R.J.; Gruber, D.F. Shipboard design and fabrication of custom 3D-printed soft robotic manipulators for the investigation of delicate deep-sea organisms. PLoS ONE 2018, 13, e0200386. [Google Scholar] [CrossRef] [PubMed]
- Sinatra, N.R.; Teeple, C.B.; Vogt, D.M.; Parker, K.K.; Gruber, D.F.; Wood, R.J. Ultragentle manipulation of delicate structures using a soft robotic gripper. Sci. Robot. 2019, 4, eaax5425. [Google Scholar] [CrossRef] [PubMed]
- Xie, Z.; Domel, A.G.; An, N.; Green, C.; Gong, Z.; Wang, T.; Knubben, E.M.; Weaver, J.C.; Bertoldi, K.; Wen, L. Octopus Arm-Inspired Tapered Soft Actuators with Suckers for Improved Grasping. Soft Robot. 2020, 7, 639–648. [Google Scholar] [CrossRef]
- Prats, M.; Garcia, J.; Wirth, S.; Ribas, D.; Sanz, P.; Ridao, P.; Gracias, N.; Oliver, G. Multipurpose autonomous underwater intervention: A systems integration perspective. In Proceedings of the 2012 20th Mediterranean Conference on Control & Automation (MED), Barcelona, Spain, 3–6 July 2012; pp. 1379–1384. [Google Scholar]
- De Novi, G.; Melchiorri, C.; Garcia, J.; Sanz, P.; Ridao, P.; Oliver, G. A new approach for a reconfigurable autonomous underwater vehicle for intervention. In Proceedings of the 2009 3rd Annual IEEE Systems Conference, Vancouver, BC, Canada, 23–26 March 2009; pp. 23–26. [Google Scholar]
- Bemfica, J.; Melchiorri, C.; Moriello, L.; Palli, G.; Scarcia, U. A three-fingered cable-driven gripper for underwater applications. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2469–2474. [Google Scholar]
- Catalano, M.G.; Grioli, G.; Farnioli, E.; Serio, A.; Piazza, C.; Bicchi, A. Adaptive synergies for the design and control of the Pisa/IIT SoftHand. Int. J. Robot. Res. 2014, 33, 768–782. [Google Scholar] [CrossRef] [Green Version]
- Stuart, H.S.; Wang, S.; Gardineer, B.; Christensen, D.L.; Aukes, D.M.; Cutkosky, M. A compliant underactuated hand with suction flow for underwater mobile manipulation. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 6691–6697. [Google Scholar]
- Stuart, H.; Wang, S.; Khatib, O.; Cutkosky, M.R. The ocean one hands: An adaptive design for robust marine manipulation. Int. J. Robot. Res. 2017, 36, 150–166. [Google Scholar] [CrossRef]
- Chocron, O.; Prieur, U.; Pino, L. A validated feasibility prototype for AUV reconfigurable magnetic coupling thruster. IEEE/ASME Trans. Mechatron. 2013, 19, 642–650. [Google Scholar] [CrossRef]
- Sinatra, N.; Ranzani, T.; Vlassak, J.; Parker, K.; Wood, R. Nanofiber-reinforced soft fluidic micro-actuators. J. Micromech. Microeng. 2018, 28, 084002. [Google Scholar] [CrossRef] [Green Version]
- Takeuchi, K.; Nomura, S.; Tamamoto, T.; Sakagami, N.; Koganezawa, K. Development of multi-joint gripper for underwater operations. In Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–6. [Google Scholar]
- Navarro, S.E.; Marufo, M.; Ding, Y.; Puls, S.; Göger, D.; Hein, B.; Wörn, H. Methods for safe human-robot-interaction using capacitive tactile proximity sensors. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1149–1154. [Google Scholar]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast point feature histograms (FPFH) for 3D registration. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3212–3217. [Google Scholar]
- Martinez-Hernandez, U.; Metta, G.; Dodd, T.J.; Prescott, T.J.; Natale, L.; Lepora, N.F. Active contour following to explore object shape with robot touch. In Proceedings of the 2013 World Haptics Conference (WHC), Daejeon, Korea, 14–17 April 2013; pp. 341–346. [Google Scholar]
- Fishel, J.A.; Loeb, G.E. Bayesian exploration for intelligent identification of textures. Front. Neurorobotics 2012, 6, 4. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nguyen, K.C.; Perdereau, V. Fingertip force control based on max torque adjustment for dexterous manipulation of an anthropomorphic hand. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 3557–3563. [Google Scholar]
- Liu, H.; Song, X.; Bimbo, J.; Althoefer, K.; Senerivatne, L. Intelligent fingertip sensing for contact information identification. In Advances in Reconfigurable Mechanisms and Robots I; Springer: New York, NY, USA, 2012; pp. 599–608. [Google Scholar]
- Dang, H.; Allen, P.K. Stable grasping under pose uncertainty using tactile feedback. Auton. Robot. 2014, 36, 309–330. [Google Scholar] [CrossRef]
- Song, X.; Liu, H.; Althoefer, K.; Nanayakkara, T.; Seneviratne, L.D. Efficient break-away friction ratio and slip prediction based on haptic surface exploration. IEEE Trans. Robot. 2013, 30, 203–219. [Google Scholar] [CrossRef] [Green Version]
- Teshigawara, S.; Tsutsumi, T.; Shimizu, S.; Suzuki, Y.; Ming, A.; Ishikawa, M.; Shimojo, M. Highly sensitive sensor for detection of initial slip and its application in a multi-fingered robot hand. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1097–1102. [Google Scholar]
- Drimus, A.; Kootstra, G.; Bilberg, A.; Kragic, D. Design of a flexible tactile sensor for classification of rigid and deformable objects. Robot. Auton. Syst. 2014, 62, 3–15. [Google Scholar] [CrossRef]
- Kappassov, Z.; Corrales, J.A.; Perdereau, V. Tactile sensing in dexterous robot hands. Robot. Auton. Syst. 2015, 74, 195–220. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Bao, R.; Tao, J.; Li, J.; Dong, M.; Pan, C. Recent progress in tactile sensors and their applications in intelligent systems. Sci. Bull. 2020, 65, 70–88. [Google Scholar] [CrossRef] [Green Version]
- Büscher, G.H.; Kõiva, R.; Schürmann, C.; Haschke, R.; Ritter, H.J. Flexible and stretchable fabric-based tactile sensor. Robot. Auton. Syst. 2015, 63, 244–252. [Google Scholar] [CrossRef] [Green Version]
- Seminara, L.; Capurro, M.; Cirillo, P.; Cannata, G.; Valle, M. Electromechanical characterization of piezoelectric PVDF polymer films for tactile sensors in robotics applications. Sensors Actuators Phys. 2011, 169, 49–58. [Google Scholar] [CrossRef]
- Goger, D.; Gorges, N.; Worn, H. Tactile sensing for an anthropomorphic robotic hand: Hardware and signal processing. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 895–901. [Google Scholar]
- Chuang, C.H.; Wang, M.S.; Yu, Y.C.; Mu, C.L.; Lu, K.F.; Lin, C.T. Flexible tactile sensor for the grasping control of robot fingers. In Proceedings of the 2013 International Conference on Advanced Robotics and Intelligent Systems, Tainan, Taiwan, 31 May–2 June 2013; pp. 141–146. [Google Scholar]
- Chuang, C.H.; Li, T.H.; Chou, I.C.; Teng, Y.J. Piezoelectric tactile sensor for submucosal tumor detection in endoscopy. Sens. Act. Phys. 2016, 244, 299–309. [Google Scholar] [CrossRef]
- Dahiya, R.S.; Valle, M. Tactile sensing for robotic applications. In Sensors, Focus on Tactile, Force and Stress Sensors; IntechOpen: London, UK, 2008; pp. 298–304. Available online: https://www.intechopen.com/books/sensors-focus-on-tactile-force-and-stress-sensors/tactile_sensing_for_robotic_applications (accessed on 7 June 2021).
- Lee, H.K.; Chung, J.; Chang, S.I.; Yoon, E. Normal and shear force measurement using a flexible polymer tactile sensor with embedded multiple capacitors. J. Micro. Syst. 2008, 17, 934–942. [Google Scholar]
- Schmitz, A.; Maiolino, P.; Maggiali, M.; Natale, L.; Cannata, G.; Metta, G. Methods and technologies for the implementation of large-scale robot tactile sensors. IEEE Trans. Robot. 2011, 27, 389–400. [Google Scholar] [CrossRef]
- Heyneman, B.; Cutkosky, M.R. Biologically inspired tactile classification of object-hand and object-world interactions. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012; pp. 167–173. [Google Scholar]
- Li, T.; Luo, H.; Qin, L.; Wang, X.; Xiong, Z.; Ding, H.; Gu, Y.; Liu, Z.; Zhang, T. Flexible capacitive tactile sensor based on micropatterned dielectric layer. Small 2016, 12, 5042–5048. [Google Scholar] [CrossRef]
- Wan, Y.; Qiu, Z.; Hong, Y.; Wang, Y.; Zhang, J.; Liu, Q.; Wu, Z.; Guo, C.F. A Highly Sensitive Flexible Capacitive Tactile Sensor with Sparse and High-Aspect-Ratio Microstructures. Adv. Electron. Mater. 2018, 4, 1700586. [Google Scholar] [CrossRef]
- Xie, H.; Jiang, A.; Wurdemann, H.A.; Liu, H.; Seneviratne, L.D.; Althoefer, K. Magnetic resonance-compatible tactile force sensor using fiber optics and vision sensor. IEEE Sens. J. 2013, 14, 829–838. [Google Scholar] [CrossRef]
- Ward-Cherrier, B.; Pestell, N.; Cramphorn, L.; Winstone, B.; Giannaccini, M.E.; Rossiter, J.; Lepora, N.F. The tactip family: Soft optical tactile sensors with 3d-printed biomimetic morphologies. Soft Robot. 2018, 5, 216–227. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, Y.; Hao, J.; Yang, J.; Dong, E. Subtle Vibration Sensing and Dimension Measurement with a Bio-inspired Optical Tactile Sensor. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; pp. 1248–1253. [Google Scholar]
- Alfadhel, A.; Khan, M.A.; de Freitas, S.C.; Kosel, J. Magnetic tactile sensor for braille reading. IEEE Sens. J. 2016, 16, 8700–8705. [Google Scholar] [CrossRef] [Green Version]
- Viola, F.A.; Spanu, A.; Ricci, P.C.; Bonfiglio, A.; Cosseddu, P. Ultrathin, flexible and multimodal tactile sensors based on organic field-effect transistors. Sci. Rep. 2018, 8, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Hua, Q.; Yu, R.; Zhang, Y.; Pan, C. Flexible, stretchable and wearable multifunctional sensor array as artificial electronic skin for static and dynamic strain mapping. Adv. Electron. Mater. 2015, 1, 1500142. [Google Scholar] [CrossRef]
- Li, R.; Adelson, E.H. Sensing and recognizing surface textures using a gelsight sensor. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 1241–1247. [Google Scholar]
- Johnson, M.K.; Cole, F.; Raj, A.; Adelson, E.H. Microgeometry capture using an elastomeric sensor. ACM Trans. Graph. (TOG) 2011, 30, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Tiwana, M.I.; Redmond, S.J.; Lovell, N.H. A review of tactile sensing technologies with applications in biomedical engineering. Sens. Actuators Phys. 2012, 179, 17–31. [Google Scholar] [CrossRef]
- Dahiya, R.S.; Valle, M. Robotic Tactile Sensing: Technologies and System; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Azaman, N.I.L.; Ayub, M.A.; Ahmad, A.A. Characteristic and sensitivity of Quantum Tunneling Composite (QTC) material for tactile device applications. In Proceedings of the 2016 7th IEEE Control and System Graduate Research Colloquium (ICSGRC), Shah Alam, Malaysia, 8 August 2016; pp. 7–11. [Google Scholar]
- De Oliveira, T.E.A.; Cretu, A.M.; Petriu, E.M. Multimodal bio-inspired tactile sensing module. IEEE Sens. J. 2017, 17, 3231–3243. [Google Scholar] [CrossRef]
- Hasegawa, H.; Mizoguchi, Y.; Tadakuma, K.; Ming, A.; Ishikawa, M.; Shimojo, M. Development of intelligent robot hand using proximity, contact and slip sensing. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 777–784. [Google Scholar]
- Segil, J.; Patel, R.; Klingner, J.; ff Weir, R.F.; Correll, N. Multi-modal prosthetic fingertip sensor with proximity, contact, and force localization capabilities. Adv. Mech. Eng. 2019, 11, 1687814019844643. [Google Scholar] [CrossRef] [Green Version]
- Kampmann, P.; Kirchner, F. Integration of fiber-optic sensor arrays into a multi-modal tactile sensor processing system for robotic end-effectors. Sensors 2014, 14, 6854–6876. [Google Scholar] [CrossRef]
- Din, S.; Xu, W.; Cheng, L.K.; Dirven, S. A stretchable multimodal sensor for soft robotic applications. IEEE Sens. J. 2017, 17, 5678–5686. [Google Scholar] [CrossRef]
- O’BRIEN, D.; Lane, D. Force and explicit slip sensing for the AMADEUS underwater gripper. Int. J. Syst. Sci. 1998, 29, 471–483. [Google Scholar] [CrossRef]
- Dennerlein, J.; Howe, R.; Shahoian, E.; Olroyd, C. Vibrotactile feedback for an underwater telerobot. Robotics and Applications. In Robotics and applications; Robotic and manufacturing systems recent results in research, development and applications International symposium, Proceedings of the Fourth Biannual World Automation Congress, Maui, HI, USA, 11–15 June 2000; TSI Enterprises, Inc.: San Antonio, TX, USA, 2000; pp. 244–249. [Google Scholar]
- Palli, G.; Moriello, L.; Scarcia, U.; Melchiorri, C. An intrinsic tactile sensor for underwater robotics. IFAC Proc. Vol. 2014, 47, 3364–3369. [Google Scholar] [CrossRef] [Green Version]
- Aggarwal, A.; Kampmann, P.; Lemburg, J.; Kirchner, F. Haptic Object Recognition in Underwater and Deep-sea Environments. J. Field Robot. 2015, 32, 167–185. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, W.; Gao, L.; Zhang, Y.; Tang, W. Design, analysis and experiment of a tactile force sensor for underwater dexterous hand intelligent grasping. Sensors 2018, 18, 2427. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Muscolo, G.G.; Moretti, G.; Cannata, G. SUAS: A novel soft underwater artificial skin with capacitive transducers and Hyperelastic membrane. Robotica 2019, 37, 756–777. [Google Scholar] [CrossRef]
- Nadeau, P.; Abbott, M.; Melville, D.; Stuart, H.S. Tactile sensing based on fingertip suction flow for submerged dexterous manipulation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 3701–3707. [Google Scholar]
- Palli, G.; Moriello, L.; Melchiorri, C. Experimental evaluation of sealing materials in 6-axis force/torque sensors for underwater applications. In Proceedings of the International Conference on Computer Aided Systems Theory, Las Palmas de Gran Canaria, Spain, 8–13 February 2015; pp. 841–852. [Google Scholar]
- Katzschmann, R.K.; DelPreto, J.; MacCurdy, R.; Rus, D. Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 2018, 3. [Google Scholar] [CrossRef] [Green Version]
- Picardi, G.; Chellapurath, M.; Iacoponi, S.; Stefanni, S.; Laschi, C.; Calisti, M. Bioinspired underwater legged robot for seabed exploration with low environmental disturbance. Sci. Robot. 2020, 5. [Google Scholar] [CrossRef]
- Tadesse, Y.; Villanueva, A.; Haines, C.; Novitski, D.; Baughman, R.; Priya, S. Hydrogen-fuel-powered bell segments of biomimetic jellyfish. Smart Mater. Struct. 2012, 21, 045013. [Google Scholar] [CrossRef] [Green Version]
- Behl, M.; Kratz, K.; Zotzmann, J.; Nöchel, U.; Lendlein, A. Reversible bidirectional shape-memory polymers. Adv. Mater. 2013, 25, 4466–4469. [Google Scholar] [CrossRef] [PubMed]
- Yeom, S.W.; Oh, I.K. A biomimetic jellyfish robot based on ionic polymer metal composite actuators. Smart Mater. Struct. 2009, 18, 085002. [Google Scholar] [CrossRef]
- Christianson, C.; Goldberg, N.N.; Deheyn, D.D.; Cai, S.; Tolley, M.T. Translucent soft robots driven by frameless fluid electrode dielectric elastomer actuators. Sci. Robot. 2018, 3, 17. [Google Scholar] [CrossRef] [Green Version]
- Imran, A.B.; Harun-Ur-Rashid, M.; Takeoka, Y. Polyrotaxane Actuators. In Soft Actuators; Springer: Berlin/Heidelberg, Germany, 2019; pp. 81–147. [Google Scholar]
- Christianson, C.; Bayag, C.; Li, G.; Jadhav, S.; Giri, A.; Agba, C.; Li, T.; Tolley, M.T. Jellyfish-Inspired Soft Robot Driven by Fluid Electrode Dielectric Organic Robotic Actuators. Front. Robot. AI 2019, 6, 126. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, T.; Li, G.; Liang, Y.; Zhang, M.; Liu, B.; Wong, T.W.; Forman, J.; Chen, M.; Wang, G.; Tao, Y.; et al. Untethered soft robotic jellyfish. Smart Mater. Struct. 2018, 28, 015019. [Google Scholar] [CrossRef]
- Shintake, J.; Shea, H.; Floreano, D. Biomimetic underwater robots based on dielectric elastomer actuators. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 4957–4962. [Google Scholar]
- Champion, B.T.; Joordens, M.A. Underwater swarm robotics review. In Proceedings of the 2015 10th System of Systems Engineering Conference (SoSE), San Antonio, TX, USA, 17–20 May 2015; pp. 111–116. [Google Scholar]
Figure 1.
Representation of the motions of the hard and soft robots: (a) dexterity, (b) position sensing, (c) manipulation, and (d) loading, adopted from [20].
Figure 1.
Representation of the motions of the hard and soft robots: (a) dexterity, (b) position sensing, (c) manipulation, and (d) loading, adopted from [20].

Figure 2.
Illustration of (a) dexterous hand for underwater application by Phillips et al. (reprinted with permission from [85]) in which soft grippers are inspired from (b) boa-type, (c) bellow-type by Galloway et al. [13], (d) demonstration of bellow- (upper), and boa-type (lower) soft grippers under oceanic environment (reprinted with permission from [13]), and (e) modulators form: rotary (bottom left) and bending (bottom right) modulators developed by Kurumaya et al. (reprinted with permission from [86]).
Figure 2.
Illustration of (a) dexterous hand for underwater application by Phillips et al. (reprinted with permission from [85]) in which soft grippers are inspired from (b) boa-type, (c) bellow-type by Galloway et al. [13], (d) demonstration of bellow- (upper), and boa-type (lower) soft grippers under oceanic environment (reprinted with permission from [13]), and (e) modulators form: rotary (bottom left) and bending (bottom right) modulators developed by Kurumaya et al. (reprinted with permission from [86]).

Figure 3.
Example of some piezoelectric and piezoresistive tactile sensors (a) basic structure of the slip sensor for multi-fingered robot hand by Teshigawra et al. (reprinted with permission from [121]), (b) fabric-based tactile sensor designed by Büscher et al. (reprinted with permission from [125]) (i) construction of the sensor with four fabric layers, (ii) schematic illustration of the assembly, (iii) grasp, and (iv) graphical sensor output, (c) piezoresistive sensor structure developed by Drimus et al. (reprinted with permission from [122]), and (d) fabrication procedures and an image of the miniaturized tactile sensor developed by Chuang et al. integrated with an endoscope (reprinted with permission from [129]).
Figure 3.
Example of some piezoelectric and piezoresistive tactile sensors (a) basic structure of the slip sensor for multi-fingered robot hand by Teshigawra et al. (reprinted with permission from [121]), (b) fabric-based tactile sensor designed by Büscher et al. (reprinted with permission from [125]) (i) construction of the sensor with four fabric layers, (ii) schematic illustration of the assembly, (iii) grasp, and (iv) graphical sensor output, (c) piezoresistive sensor structure developed by Drimus et al. (reprinted with permission from [122]), and (d) fabrication procedures and an image of the miniaturized tactile sensor developed by Chuang et al. integrated with an endoscope (reprinted with permission from [129]).

Table 1.
Example of soft robotic arms/hands and their characteristics.
| Name | References, Year | Actuation | Materials | Gripping Force | Diving Depth |
|---|---|---|---|---|---|
| OCTARM | [97], 2005 | Air | Elastomers | - | - |
| Octopus Robot | [98], 2011 | Motor Driven | Silicone | - | - |
| Three-fingered Gripper | [99], 2013 | Motor Driven | Silicon Skin | - | 100 m |
| Boa and Bellow Soft Grippers | [13], 2016 | Pressurized Fluid | Fiber- reinforced Elastomers | ∼2.2 kN | 800 m |
| Glove-Based Tele-operable Soft Hand | [85], 2018 | Hydraulics | Fiber- reinforced Elastomers | - | 2300 m |
| Bio-inspired Soft Arm | [90], 2018 | Air | Dragon Skin 30 | - | - |
| Soft Modular End-effector | [100], 2018 | Motor Driven | - | 150 N | ∼500 m |
| 3D-Printed Soft Manipulators | [101], 2018 | Hydraulics | Elastomers | ∼4 kN | 2224 m |
| Ultragentle Manipulator | [102], 2019 | Hydraulics | Nano-fiber Reinforced Silicone Matrix | ∼1 N | - |
| Octopus Arm Inspired Suckers | [103], 2020 | Air | Silicone Elastomer | ∼26.14 N | - |
Table 3.
Example of tactile sensors for UW environment.
| Sensing Technology | References, Year | Materials Used | Functionality | Applications |
|---|---|---|---|---|
| Employing strain gauge | [152], 1998 | PVDF | Force, and slip sensing | Artificial fingertip in UW environment |
| Piezo- electricity | [153], 2000 | Silicone rubber | Identifying hardness of different objects | Successfully recognized wood, machine wax, and aluminum in UW environment |
| Optical | [154], 2014 | Silicone rubber | Force, and torque sensing | Three fingered hand- like end- effector |
| Fiber- optic | [155], 2015 | - | Contact force, and haptic object recognition | Hydraulic gripper: SeaGrip |
| Piezo- resistance | [156], 2018 | Silicon, silicon cup, silicone oil, etc | Force sensing | Dexterous robotic hand in UW environment |
| Capacitance | [157], 2019 | Polyvinyl chloride, Silicone, etc | Force sensing (magnitude, and position) | AUV |
| Finger tip suction flow | [158], 2020 | - | Contact information | AUV |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Subad, R.A.S.I.; Cross, L.B.; Park, K. Soft Robotic Hands and Tactile Sensors for Underwater Robotics. Appl. Mech. 2021, 2, 356-382. https://0-doi-org.brum.beds.ac.uk/10.3390/applmech2020021
AMA Style
Subad RASI, Cross LB, Park K. Soft Robotic Hands and Tactile Sensors for Underwater Robotics. Applied Mechanics. 2021; 2(2):356-382. https://0-doi-org.brum.beds.ac.uk/10.3390/applmech2020021
Chicago/Turabian StyleSubad, Rafsan Al Shafatul Islam, Liam B. Cross, and Kihan Park. 2021. "Soft Robotic Hands and Tactile Sensors for Underwater Robotics" Applied Mechanics 2, no. 2: 356-382. https://0-doi-org.brum.beds.ac.uk/10.3390/applmech2020021