1. Introduction
With the rapid development of LiDAR technology, the highly accurate three-dimensional (3D) point cloud is used to retrieve real-world information in many fields [
1]. Currently, the Terrestrial LiDAR Scanner (TLS), Airborne LiDAR Scanner (ALS) and Mobile LiDAR Scanner (MLS) are widely used in forestry applications. The accuracy of TLS can even reach the millimeter level [
2] and its collected tree point cloud can help foresters easily acquire forestry parameters, such as DBH, volume, tree height and crown width [
3,
4]. This can significantly change the nature of forest inventory data collection. The traditional method is time consuming with a high labor cost and relatively low accuracy [
5]. Using LiDAR data with better developed algorithms can not only improve efficiency, reduce cost and have better precision, but can also establish 3D tree models which were previously unavailable.
Three-dimensional tree modeling includes branch modeling and leaf modeling. For tree modeling, both are important. However branch modeling is more important for the forest inventory study and there are two main methods: Delaunay triangulation method and the skeleton method. The model obtained by using Delaunay triangulation looks more realistic, but it has difficulty in extracting forest inventory parameters, and the error of morphological parameters is relatively large [
6]. In contrast, the skeleton method can overcome these problems. The skeleton refers to a kind of object representation performed by lines characterized by zero thickness and consistent with the connectivity and topology of the original model as the ideal expression [
7,
8]. The quantitative structure model (QSM) reconstruction algorithm uses the branch skeleton to establish 3D tree model and calculate volume [
9].
Shi [
10] points out that the extracting algorithms of the branch skeleton from the tree point cloud are mainly divided into three categories—based on voxel space (VS), point clouds contract (PCC) and geometric characteristic (GC). While the GC algorithm is slightly less computationally efficient than PCC, it has reached optimal or equal excellence among three categories in dealing with small offshoots, model topology, overall effect, adjacent offshoots and center deviation. It meets the requirement of relevant studies that sacrifice acceptable time for higher quality modeling. Therefore, skeleton extraction based on GC has always been a popular research topic [
11].
Xu et al. [
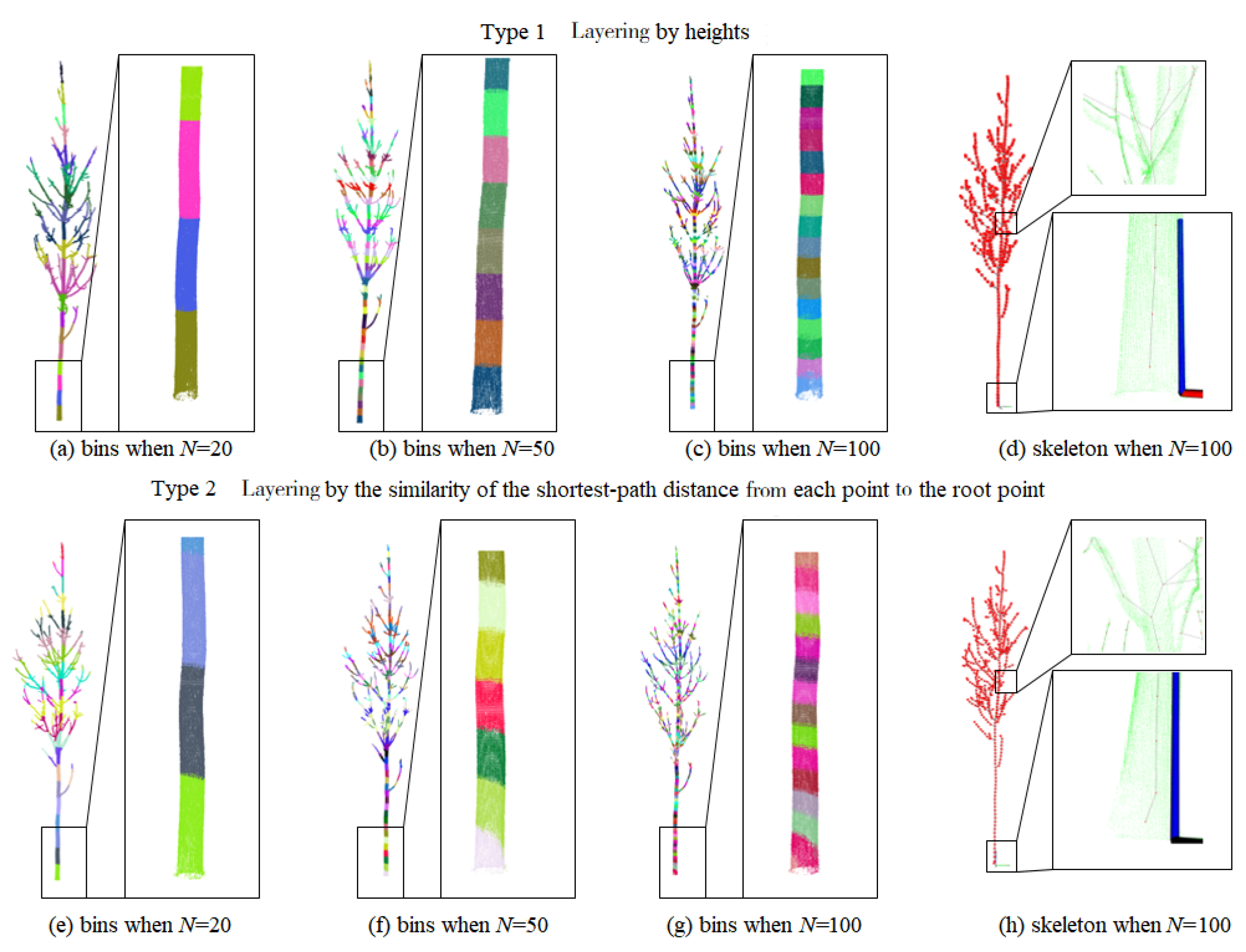
12] developed a general procedure based on GC to produce the branch skeleton: first, the branch point cloud is layered according to certain rules. Each layer contains several branch segments, and they are located in completely different offshoots, and the collection of them is defined as a bins. There are two main layering rules, one which is layering by the similarity of the shortest-path distance from each point to the root point, and the other which is layering by heights. The root point chosen in branch point cloud needs to adequately represent the bottom of the trunk. Then, each bins is clustered into independent branch segments (each segment of a bins is also defined as a bin, however, bins is not simply the plural form of bin) to obtain skeleton nodes. Finally, the skeleton nodes of adjacent layers are connected according to the correct topological relationship.
For this general procedure, the two classification rules and the number of bins are the key factors influencing the model output, as shown in
Figure 1, where
N represents the number of layers. When using the method of layering by heights, center deviation at the trunk bifurcation is huge, while using the method of layering by the similarity of the shortest-path distance from each point to the root point, the output is relatively better, however, there is still a large deviation near the root. To solve the problem, Wang [
13] adopted the method of excavating a partial root to retain accessibility with the certain radius of bin. Each center of bin near the root can be very close to the center of the branch, which implies that the problem can be solved. Generally, the centroid of the bin is used as the center of the bin.
Topological correctness is also crucial and is a challenging problem [
14]. Model topology using the skeleton can be simply thought of as the connection between the skeleton nodes, that is to say, skeleton lines [
15]. Topological correctness means that the skeleton could correctly express the relationship of real offshoots [
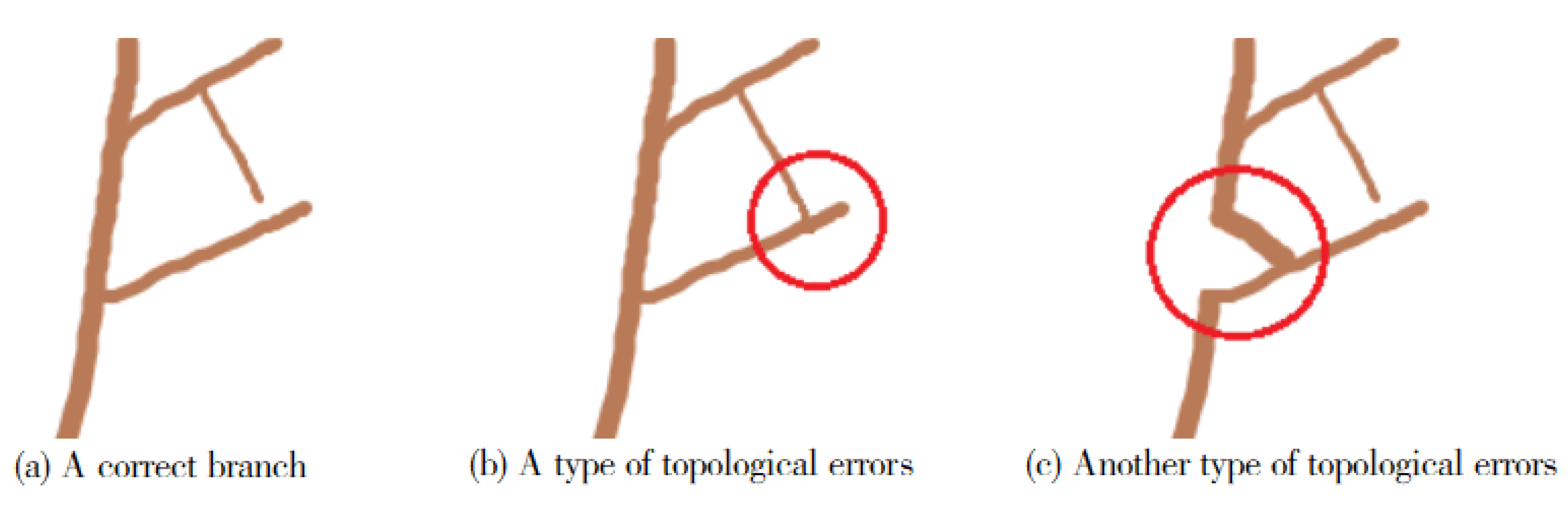
16]. In other words, skeleton lines that do not accord with the real trunk bifurcation should not be produced. There are two main conditions. One is that there is no error violating the natural law that two or more different parent offshoots cannot produce a same sub offshoot, as shown in
Figure 2b. The minimum spanning tree (MST) algorithm (including Prim’s MST algorithm and the Kruskal algorithm) can be used to avoid this problem after the skeleton is produced [
17,
18]. However, it is difficult to ensure that the sub offshoot in the skeleton this time is connect to its true father offshoot. The other is that there is no error that part of one offshoot is connected with another offshoot, as shown in
Figure 2c. Using the described general procedure, there will be incorrectly connected skeleton nodes: although it is easy to ensure skeleton nodes on the same layer cannot be connected with each other, topological errors between different levels can hardly be avoided.
There has been another classification rule of GC algorithms in recent years—layering by spatial orientation and the radius of branch. This rule is not to layer the point cloud once, but to add extra information at certain places of branch (such as trunk bifurcation), or to keep computing a new reference plane as the cut plane. In essence, this rule still uses information about axial heights and shortest-path distances. Furthermore, because of its complexity, algorithms using this rule are commonly slow. For example, You et al. [
19] adopted a simulation of cutting offshoots at trunk bifurcations; TreeQSM [
20] used separating offshoots and executing Xu’s general process in every offshoot. Two studies used the B-spline curve and layering relationship to decide the connection of skeleton nodes, respectively. Fan et al. proposed an improvement of TreeQSM named AdQSM [
21]. It used a way that combined Delaunay triangulation and graph theory to connect skeleton nodes. Therefore, current GC algorithms are separating the process of producing skeleton nodes and skeleton lines.
Researchers who adopted GC algorithms tried different ways to optimize the output skeleton. Problems such as center deviation can be addressed by three-point average by Li et al. [
22]. Interpolation (commonly Hermite method) can be used for making a better connection at trunk bifurcation to make the skeleton appear more beautiful and natural [
23]. As for breakpoints, Sun et al. [
24] described a method that uses angles calculated with adjacent skeleton lines to determine the topological connection of each breakpoint. In the field of mesh animation, Jacobson et al. [
25] listed some skeleton optimization methods with various aspects that have the potential to be used in branch point cloud skeleton extraction.
Runions [
26] applied the space colonization algorithm (SCA) to the tree skeleton extraction in 2007 and Shi et al. [
27] and Pan [
28] tried to improve it. It is difficult to control the type of trunk bifurcations with the SCA, so it is mainly used to simulate the small offshoots using the leaf point cloud when the canopy branch point cloud is incomplete due to occlusion and other reasons [
29]. SCA can also be applied to extract the tree skeleton from the ALS point cloud, the branch part of which is not very clear [
30].
In the previous discussion, it can be found that there are still some problems in the GC algorithm that deserve to be improved, especially ignoring the internal topological relationship of skeleton nodes. The ecological research shows that trees tend to use the shortest path to transmit water and nutrients for optimizing resource allocation [
31]. Based on this natural phenomenon, this research developed a novel algorithm based on GC to extract branch skeleton from the tree point cloud in the way of the incomplete simulation of tree transmitting water and nutrients (ISTTWN). This produced the skeleton nodes and corresponding skeleton lines at same time, which can effectively improve the topological correctness. This ISTTWN algorithm is explained in detail below and was implemented by C++ programming to be verified. Furthermore, different ways have been used to improve the algorithm for reducing the time and memory consumption.
2. Materials
We used a tree point cloud scanned in Chenwei forest farm, Sihong County, Suqian City, Jiangsu Province, China. The tree species corresponding to the point cloud used in this research is American black poplar (
Populus deltoides) which was planted in Spring, 2007, and scanned in Autumn, 2019. The tree point clouds were scanned by RIEGL VZ-400i TLS scanner with scanning mode Panorama40, as shown in
Table 1. A tree point cloud was randomly selected.
Figure 3 is the photo of the sample plot. This tree point cloud will mainly be used for the experiment. In
Figure 3, the tree point cloud was already separated into a point cloud of the branch and a point cloud of leaves, which uses a kd-tree with radius
m.
We also randomly used the tree point clouds of three public tree species provided by Seidel et al. [
32] including European beech (
Fagus sylvatica L.), European ash (
Fraxinus excelsior) and European Oak (
Quercus robur L.). Similarly, these clouds have performed the separation of branches and leaves, as shown in
Figure 4. Each radius was set as 10x average point cloud intervals. These will mainly be used to verify the universality of the proposed algorithm. The tree ages are beyond 40, beyond 40 and beyond 70.
5. Discussion
In this section, we will compare the proposed algorithm to Xu et al.’s procedure. The reason we chose Xu et al.’s procedure is that the inner of later improved GC algorithms is always using Xu et al.’s procedure. Furthermore, some extra steps introduced will increase the calculation quantity and reduce the efficiency. If Xu’s algorithm can be improved, the efficiency and effect of other GC algorithms that use Xu’s algorithm as the calling part will naturally be improved. Since most CPUs used in electronic devices now support multithreading technology, it is more realistic to compare the efficiency of the two in multithreading, as shown in
Table 5.
As shown in
Table 5 shows, an iterative ISTTWN algorithm using multithreading with breakpoint connection requires slightly more memory, but is significantly faster than the existing algorithm.
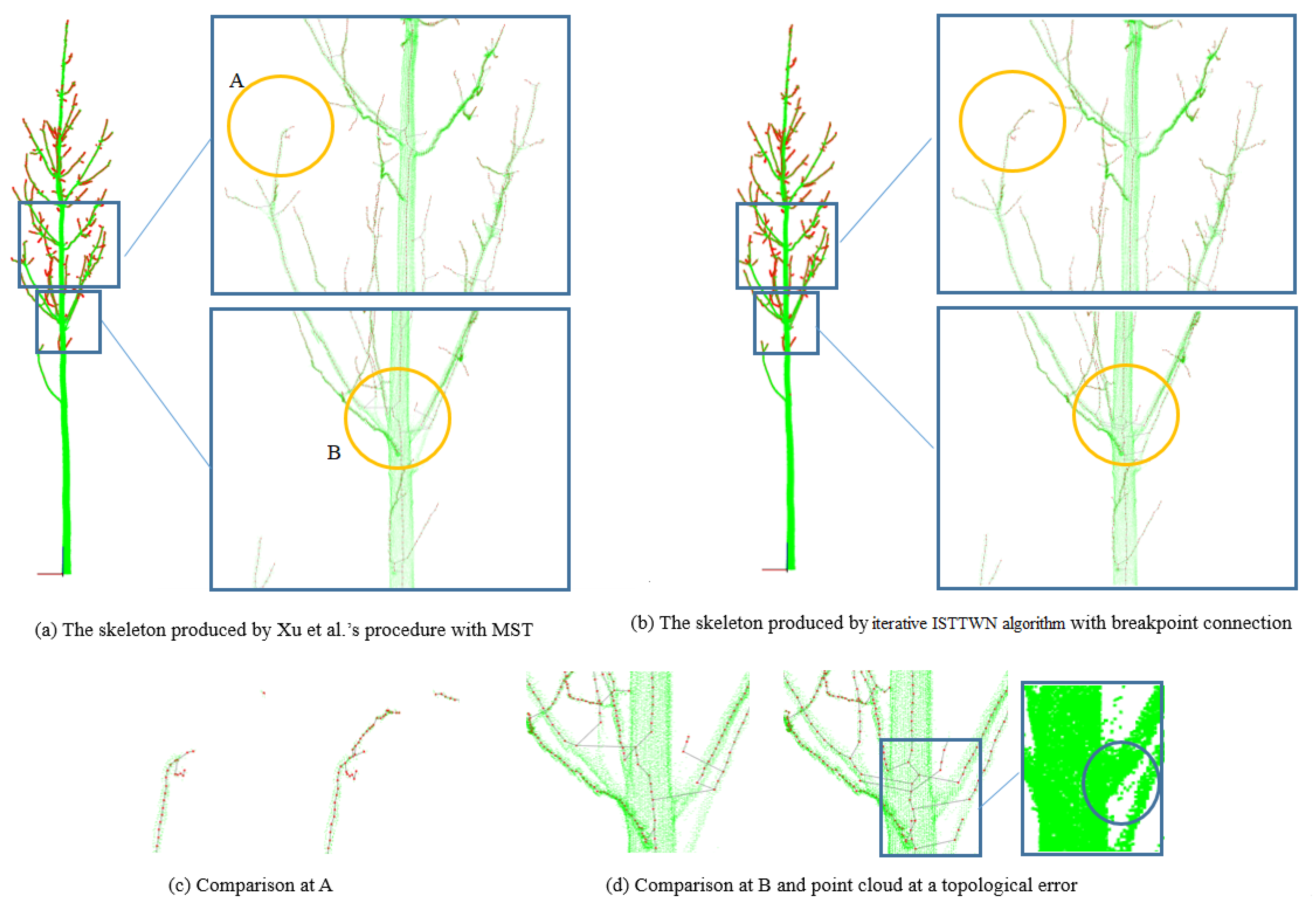
Another aspect that needs to be compared is accuracy. In order to compare which algorithm can better express the real situation of branches, the skeletons and branch point cloud are displayed at the same time, as shown in
Figure 10.
For easy understanding and description, the skeleton created with Xu et al.’s procedure is called the Xu skeleton and the one created with our method is called the ISTTWN skeleton. As shown in
Figure 10c, there are more small offshoots in the ISTTWN skeleton. In other words, the Xu skeleton failed to express some existing offshoots. The Xu skeleton has a bigger center deviation at trunk bifurcation compared with the ISTTWN skeleton. The Xu skeleton showed some incorrect offshoots relationship which is caused by the algorithm itself as the wrong skeleton does not pass through the point cloud. Although the ISTTWN skeleton has similar problems, they can be effectively alleviated by increasing
h or
l. Apart from in
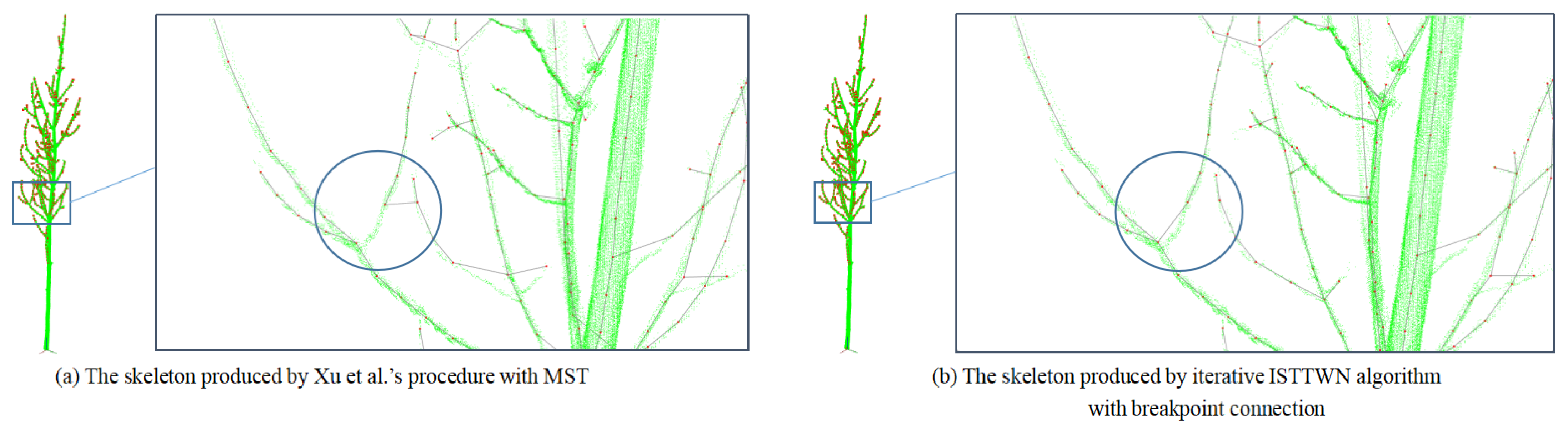
Figure 10d, when such a high-precision skeleton is not required, topological errors such as the sub offshoot connecting to the wrong father offshoots still frequently occur in Xu skeletons, as shown in
Figure 11.
Under this circumstance, the skeleton lines can be convenient for visual statistics. As initial skeletons cannot be used to directly extract parameters, we added the detailed numerical correctness of offshoots. We counted four cases in the skeleton lines: (1) the skeleton line is completely consistent with the point cloud; (2) the trend of the skeleton line is consistent with the branch trend, but not with the point cloud; (3) the skeleton lines are generated where there are no branches (or topological errors occur); and (4) the skeleton lines are produced due to noise. The results are shown in
Table 6 and
Table 7.
It can be found that, in the case of non-fineness, the algorithm proposed in this study reduces the proportion of errors and some noise effects are eliminated, thus improving the proportion of correctness, and there does not appear to be a Case (3) situation due to topology errors. Therefore, in terms of the numerical aspect, the reliability of the proposed algorithm has been proven.
According to the results,
Table 8 shows the summarized comparison of the two algorithms.
Table 8 shows that the ISTTWN skeleton can better express the actual branch connection of the tree. Therefore, it can produce a more accurate skeleton than Xu et al.’s algorithm. Xu et al.’s algorithm was used in QSM, so the ISTTWN algorithm, which has a higher running efficiency and better output skeleton, should be able to be applied to similar applications as well.
6. Conclusions
Based on the results of ecological research, the developed ISTTWN is a representative of a class of algorithms. An implementation of the algorithm is described and several improvements, such as using multithreading and changing from recursion to iterative and connecting breakpoints, were tested. In all, in order to make ISTTWN skeletons have no topological errors, the clustering algorithm should use ECE and the parameters h should be set according to the skeleton near the root. Furthermore, after several improvements, the iterative ISTTWN algorithm using multithreading with breakpoint connection is effective in dealing with the initial skeleton extraction of a branch point cloud. Furthermore, after the random visual verification of public datasets, it is confirmed that the algorithm is universal and can handle different tree branch point clouds. As the skeletons produced by the algorithm are more close to the real topology, such an effect would be helpful for subsequent skeleton optimization.
Through comparison with the existing algorithm, the proposed algorithm is better in comparative items including dealing with small offshoots, model topology, adjacent offshoots, center deviation and computational efficiency. This algorithm improves the accuracy of the skeleton by connecting skeleton points in the process, and greatly improves the efficiency of operation through improvement. In terms of time, the proposed algorithm only needs less than 60% of the time of the existing algorithm. We counted the accuracy of the skeleton in the case of it being not sufficiently fine, and the results showed that the proportion of correct skeleton lines increased by 10%.
Tree modeling is often applied in many other fields such as virtual reality (VR), computer games and movie scenes [
45]. For example, motion capture (Mocap) is used to obtain an actor’s characteristic motions [
46] to make virtual characters more real, and the method developed in this research can be used in similar fields.
Of course, the proposed algorithm still has some limitations that can be improved.
- (1)
The method of using multithreading acceleration proposed in this paper is divided mechanically. Although it can avoid common problems of multithreading, it cannot always make all threads work, so there is still room for improvement.
- (2)
The point cloud as input cannot have two offshoots attached. Otherwise, no matter what algorithm, the error shown in
Figure 10d cannot be avoided.
- (3)
Currently, there are not any reasonable algorithms of the Root Close Algorithm to process the tree point cloud, no modification was made to the original tree point cloud in this research. Thus, when the skeleton is required to be fine enough, the center deviation near the root will inevitably occur. If the root could be processed well in advance or an algorithm of root adjustment can be run after producing the skeleton, a smaller h would be feasible, even , as h is just a factor affecting the visual performance of the initial skeleton. In this way, the running speed of the algorithm will be faster and the memory consumption will be less.
- (4)
Clustering algorithm is one of the most important factors affecting the accuracy of the tree skeleton. Yang et al. [
47] pointed out that the common problems of existing clustering algorithms can be divided into four categories: sensitivity to initial parameters, difficulty in finding optimal clustering, clustering effectiveness and sensitivity to noise data. Each clustering algorithm has more or less of these problems in different application fields. Better clustering algorithms for producing the skeleton of a branch point cloud will be an important research direction. In addition, the integrity of the tree point cloud is also critical. Severe occlusion and large missing data have a huge negative impact on skeleton extraction [
48].














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}