
Resolving Persistent Packet Collisions through Broadcast Feedback in Cellular V2X Communication †


Department of Computer Science and Engineering, Korea University, Anam-ro 145, Seongbug-gu, Seoul 02841, Korea
*
Author to whom correspondence should be addressed.
†
This paper is an extension of Persistent Scheduling with Broadcast Feedback for Cellular V2X Communication, originally presented at the IEEE Vehicular Technology Conference (VTC)-Spring, 2021.
Future Internet 2021, 13(8), 211; https://0-doi-org.brum.beds.ac.uk/10.3390/fi13080211
Submission received: 27 July 2021
/
Revised: 12 August 2021
/
Accepted: 12 August 2021
/
Published: 16 August 2021
(This article belongs to the Section Internet of Things)
Abstract
:The Third Generation Partnership Project (3GPP) Release 16 defines the sensing-based semi-persistent scheduling (SPS) as the resource allocation scheme for Sidelink Mode 2 in New Radio (NR)-based vehicle-to-everything (V2X) communication. A well-known issue in Mode 2 is the persistent packet collision that results from two or more vehicles repeatedly using the same resource for transmission. It may create serious safety problems when the vehicles are in a situation where only the broadcast safety beacons can assist in driving. To resolve this issue, a solution that relies on the feedback from neighboring vehicles is proposed, through which the vehicles suffering from persistent packet collisions can quickly part and select other resources. Extensive simulations show that the proposed broadcast feedback scheme reduces persistent packet collisions by an order of magnitude compared to SPS, and it is achieved without sacrificing the average packet reception ratio (PRR). Namely, it is the quality aspect (i.e., burstiness) of the packet collisions that the proposed scheme addresses rather than the quantity (i.e., total number of collision losses). By preventing extended packet loss events, the proposed scheme is expected to serve NR V2X better, which requires stringent QoS in terms of the information update delay thereby helping to reduce the chances of vehicle crashes.
1. Introduction
The Third Generation Partnership Project (3GPP) has recently published Release 16 [1]. The newest release defines the sensing-based semi-persistent scheduling (SPS) as the resource allocation scheme for Sidelink Mode 2 for 5G New Radio (NR) vehicle-to-everything (V2X) communication. SPS allows vehicles to autonomously select a frequency resource through a sensing procedure and periodically use it for a few seconds without further scheduling until the next selection (also known as reselection) [2,3]. The scheduling scheme well serves the periodic safety-oriented beacons such as the basic safety messages (BSMs) [4] in vehicle-to-vehicle (V2V) scenarios because it reduces the overhead in resource selection. To minimize the chances of multiple vehicles selecting the same frequency resource, which would cause persistent packet collisions, SPS requires that each vehicle signals the time gap to the next packet called the resource reservation interval (RRI) in the Sidelink control information (SCI). Using this information, neighboring vehicles that monitor the SCI in every received packet can exclude the reserved resource from its candidate resource pool if they need to reselect a resource.
Although SPS can prevent many potential packet collision events through channel sensing, a well-known issue in Sidelink Mode 2 is that the persistent packet collisions are not completely avoidable [5]. The problem occurs when two vehicles need to select a new frequency resource at nearly identical times. In the current standard [2], vehicles do not advertise the resource location that they select for the next batch of periodic packets. As a consequence, the vehicles concurrently performing reselection can unknowingly decide on the same resource. Once this occurs, the packet collisions can persist for at least one second because a selected resource is used for one second on average. The problem can be aggravated even further because the current standard prescribes that the previous frequency resource can be kept in the reselection with a non-zero probability [3], producing a geometric distribution for the number of reuses. This condition will be only resolved when one or both of the vehicles reaches the time to reselect again. Unlike in Sidelink Mode 1, where the base station centrally allocates the resources, such resource collisions are inevitable in the distributed resource selection algorithm in Mode 2.
The cost of a multi-packet collision event can be high. The event renders the involved vehicles to be unrecognized by neighboring vehicles and by each other during the persistent collision event. Onboard sensors, such as radars, LiDARs, and cameras may still be able to maintain awareness in many situations, but in others like the non-light-of-sight (NLoS) positions, neighboring vehicle movements become difficult to trace under the elongated packet loss event. Therefore, in safety-critical situations, this communication lull may push a vehicle into dangerous driving conditions [5], which might even be worse off than not relying on the C-V2X safety communication at all.
Ideally, vehicles that happened to choose the same frequency resource should be able to sense the conflict as soon as it happens and back off. Choosing a resource, either on a different frequency and/or at a different time offset, would immediately terminate the persistent collision event early on. Unfortunately, however, vehicles involved in the event cannot realize the problem by themselves due to the typical half-duplex communication capability of vehicular user equipment, such as onboard units (OBUs). They are both transmitting when a collision occurs so they are unable to hear each other. Even the hybrid automatic repeat request (HARQ) mechanism and the physical sidelink feedback channel (PSFCH) introduced in NR V2X [2] cannot help because they are not for broadcast traffic, such as periodic BSM transmissions.
The objective of this paper is to solve the persistent packet collision problem through a novel feedback scheme. The solution based on the feedback from broadcast receivers has hardly been attempted thus far. As mentioned above, the receiver feedback, newly introduced in NR V2X [6], is only for unicast and groupcast traffic and not for the broadcast. One of the reasons is because broadcast receivers can be positioned at various distances and under different channel conditions relative to the colliding transmitters, which can cause the provided reports to be conflicting. However, this paper shows that the broadcast feedback is feasible in the standard framework and can be utilized to signal potential persistent collision events. The key is in defining the region of interest (ROI) and understanding the relations between received signal strength indicator (RSSI), signal-to-interference-and-noise ratio (SINR), and in-band emission (IBE) conditions in the packet collision events that occur in a given ROI. The design objectives of the proposed scheme are as follows:
- Resolve the persistent packet collision problem in sensing-based semi-persistent scheduling for Sidelink Mode 2 in NR V2X communication, so that any consecutive collisions are short-lived and preferably within two packets;
- Resolve the persistent packet collision problem without sacrificing other performance metrics. In particular, maintain the same level of packet reception ratio (PRR) as in the unmodified SPS;
- Construct the solution as an opportunistic QoS enhancer for the standard SPS algorithm within the confines of the standard framework.
It should be stressed that improving the overall PRR is not the main objective. Instead, it is given as a design constraint under which the main objective is to quickly terminate potential persistent packet collisions. Indeed, the proposed scheme reduces the length of packet collision episodes by more than an order of magnitude compared to SPS, while maintaining the PRR. In addition, the bandwidth overhead of the proposed scheme is negligible. Last but not least, it can be implemented through existing features in the standard framework.
2. Related Work
2.1. Avoiding Persistent Packet Collisions
Bazzi et al. [5] proposed to curtail semi-persistent resource use at a fixed length, overriding repeated reselection of the same resource over a certain limit, even when it is prescribed by a high probability of keeping the same frequency resource [7]. As a side-effect, any persistent collisions are limited to a deterministic length. One concerning aspect with this proposal is that a single pre-configured length may not satisfy various application requirements. On the one hand, if the resource use time limit is set for too long, the protection from persistent packet collisions may be insufficient for a more safety-critical application. On the other hand, if the limit is set for too short, most vehicles that are not suffering from the persistent collision problem will be unnecessarily forced to frequently reselect resources, which tend to raise packet collision probability in SPS due to decreased resource use predictability [8].
Jung et al. [9] proposed selecting two resources instead of one and use them alternatingly for each packet transmission. Even if the packets transmitted on one of them persistently collide with other vehicle transmissions, it is less likely for the other vehicle to choose the same two resources and collide on the second as well. Therefore, it can break a persistent packet collision spurt into non-contiguous collisions. However, the alternation decreases the resource-use predictability, which has a detrimental effect on SPS performance [8]. In addition, the proposed method violates the cellular V2X standard framework in terms of the RRI specification. If two resources are used alternatingly, much more diverse resource reservation intervals (RRIs) will be required than are allowed in the standard, which are 20, 50, and 100⋅n (1 ≤ n ≤ 10) ms in LTE V2X. NR V2X can have more diverse RRIs, but the newer ones are all below 100 ms [7]. Therefore, the issue persists if the original RRI exceeds 50 ms in NR V2X.
Jeon et al. [10] proposed to explicitly publicize the next resource coordinate that will be used by the first packet after the reselection. In case the explicit reservation by a neighbor points to the same resource, the host vehicle can change it before publicizing it and avoid the collision. For example, a vehicle can change its resource selection to avoid a resource collision because the other vehicle already publicized that it was reserving it. However, even this cannot be the solution if the two vehicles currently use the same time slot, hence in the half-duplex relation. As they cannot hear each other, the vehicles reserving the same resources will be subject to the persistent packet collision problem.
The blind retransmission scheme is a standard feature in both LTE [11] and NR [2]. If turned on, it always transmits one additional copy of the original packet at a random time displacement and at a different subchannel. Even if two vehicles coincide in the initial transmission, it is much less probable that they also coincide in the retransmission. Therefore, it can alleviate the consecutive packet collisions problem. The biggest problem with this, however, is that it consumes twice the bandwidth. For all vehicles to use it, the channel utilization must be under 50%. In this vein, NR additionally provides HARQ-based retransmission [2], which is much more efficient. Unfortunately, however, the HARQ-based retransmission is not applied to broadcast traffic. The blind retransmission may be usable when the channel load is not high. When the channel load is high, however, it may have to be coupled with congestion control (e.g., power control) that reduces its channel use because doubling the transmission requires a higher bandwidth.
2.2. Using Broadcast Feedback
Wendlend et al. [12] tried to solve the hidden node problem by using the broadcast feedback. The feedback is implemented as a bitmap that records successful receptions in the recent past in terms of the resource locations, which uses the padding space in each physical layer transport block (TB). Each vehicle collects and processes the feedback information to decide whether or not it should move to a different resource to avoid persistent packet collisions. A concerning aspect of this proposal, however, is the available padding space size that can arbitrarily change from one TB to another, and that can be small for monitoring the channel for more than several hundred milliseconds, shorter than the inter-packet gap, which can be as long as one second [7,13]. Moreover, the positions of the feedback provider population are not considered in the work. Closer receivers tend to provide more accurate reports, which farther ones may contradict.
Yoon et al. [14] proposed to use neighbor feedback to evade intentional and persistent packet collision attempts. When a packet collision occurs, a witnessing vehicle that happens to use the same subchannel next can provide a collision feedback upon which the victim reselects the resource immediately. This same idea may be employed to address unintentional packet collisions. However, the work has a limitation in that a single feedback provider is chosen so that if the only feedback provider is not in an opportune position, the feedback becomes less helpful. Yoon et al. [15] also proposed to use the broadcast feedback in the context of NR V2X to completely eliminate the continual frequency resource change in SPS, which is necessary to shield SPS from the peril of persistent packet collisions. It is not questionable, however, that the standard framework will accommodate the fully persistent scheduling.
The proposed broadcast feedback scheme in this paper departs from these existing works in several aspects, as follow:
- It resolves packet collisions in, at most, two collisions by executing the resource reselection, preventing further collisions;
- It can be implemented in the current standard framework. It can use the reserved bits in the SCI in LTE V2X or newly available resource reservation pointers in NR V2X;
- It works with little bandwidth overhead, so it is usable even under high channel utilization conditions;
- It does not rely on a particular feedback provider, so it is more reliable;
- Below, the proposed scheme is discussed in detail.
3. Broadcast Feedback on Packet Collisions
3.1. Problem of Resource Collision in SPS
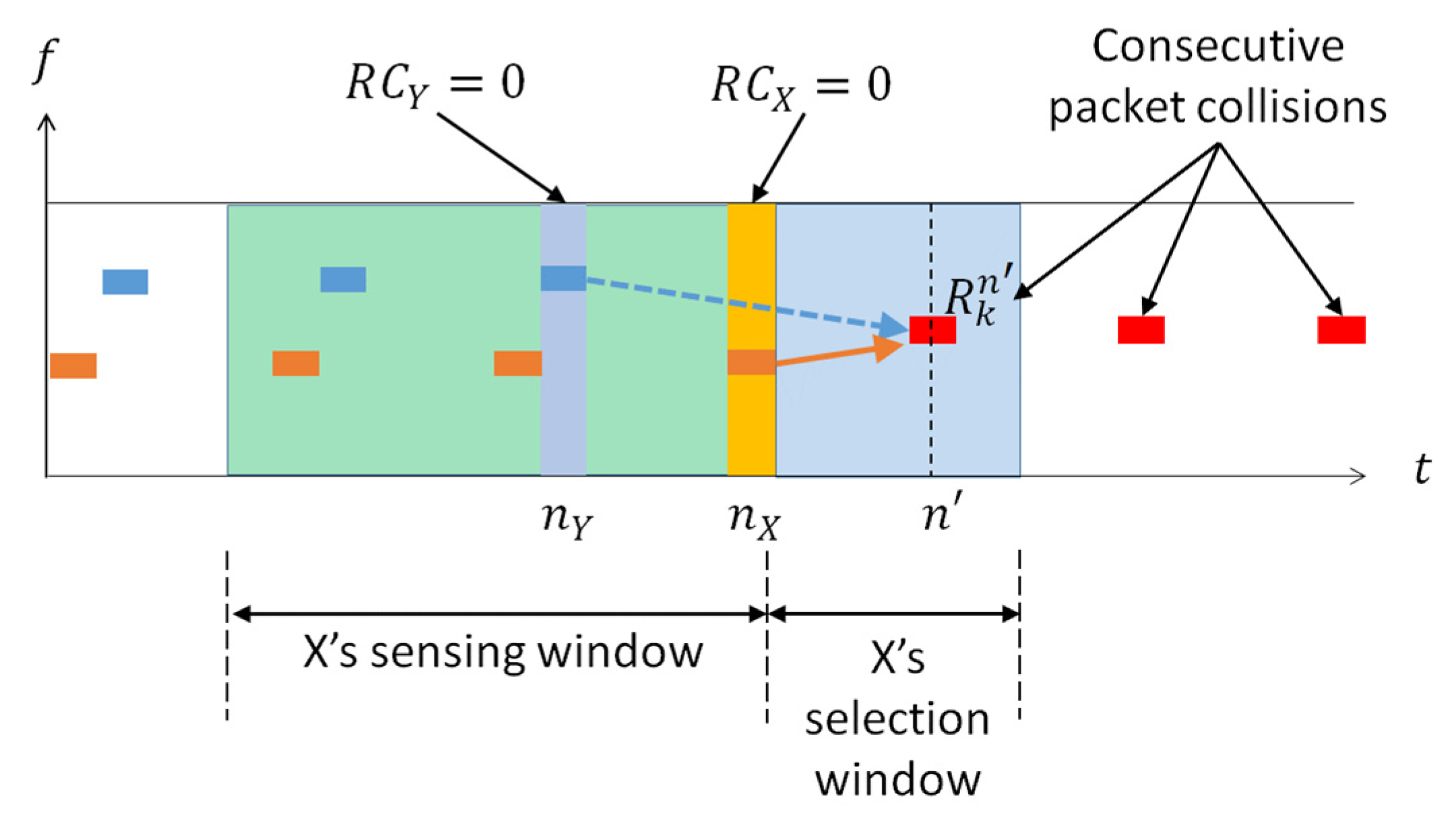
Most packet collisions are prevented in SPS through channel sensing that informs a vehicle of the resource reservations made by its neighboring vehicles. However, there are collisions that the current standard SPS cannot resolve. Figure 1 illustrates when such a collision occurs. Here, vehicle X reselects a frequency resource k for the next batch of periodic beacons to begin at slot n’ when its resource reselection counter (RCX) decrements to zero at slot nX. Unfortunately, the resource at the frequency–time coordinate <k,n’> (henceforth, denoted by ) has also been selected by another vehicle Y when RCY = 0 at slot nY. Since these vehicles do not communicate their choices to other vehicles, there is no way they can change their decisions to evade the resource collision. If the message transmission period is the same for X and Y, the vehicles will experience repeated packet collisions for up to a few seconds. In general, this problem occurs when the re-selecting vehicles have overlapping resource selection windows.
The root cause of the persistent packet collision problem in the current SPS is the lack of communication on the selected resources between the vehicles that have overlapping selection windows. Even if vehicles could signal the choice to other vehicles [10], it cannot completely prevent the problem if the two vehicles currently use the same time slot, hence in the half-duplex relation. An alternative solution approach that does not have such problem is letting a third vehicle that can observe the collision event provide a feedback to the vehicles involved in the packet collisions. This is the approach taken by the present paper.
Unlike LTE V2X, NR V2X supports all cast types in 3GPP Release 16 [3,6], namely unicast, groupcast, and broadcast. For reliability, the standard specifies the receiver feedback mechanisms, such as HARQ and PSFCH [2], for unicast and groupcast. Although relying on broadcast, however, the vehicular safety communication needs as much reliability as can be arranged. Providing broadcast feedback on the failed broadcast delivery can improve the reliability aspect. A difficulty is that because broadcast receivers can lie in various distances and channel conditions, they can provide conflicting feedbacks as to whether a packet collision occurred. Nevertheless, a careful and purpose-oriented design can overcome it. Specifically, defining the region of interest (ROI) helps reduce the chances of conflicting reports as far as the packet collision feedback is concerned. Then, the following aspects should also be addressed in the design of a broadcast feedback scheme:
- Accurate identifying conditions of a packet collision within the ROI;
- Reliable method of selecting adequate feedback provider(s) among collision-witnessing vehicles;
- Mechanism to convey the packet collision notification;
- Procedure that the feedback receiver should follow.
In this section, these aspects as well as how the scheme can be implemented in the current standard framework are discussed.
3.2. Packet Collision Sensing
In cellular V2X, every OBU continuously monitors the channel. The only time that it cannot monitor it is the time slot it transmits in. This is due to the half-duplex communication. Each time slot is composed of multiple frequency resources, each of which can be utilized by different vehicles for their safety beacon transmissions. In the monitored time slot, the transmissions from other vehicles are decoded in two steps. First, the SCI from the physical sidelink control channel (PSCCH) is decoded. Second, based on the information decoded from the SCI, the transport block (TB) in the physical sidelink shared channel (PSSCH) is found and the payload is decoded.
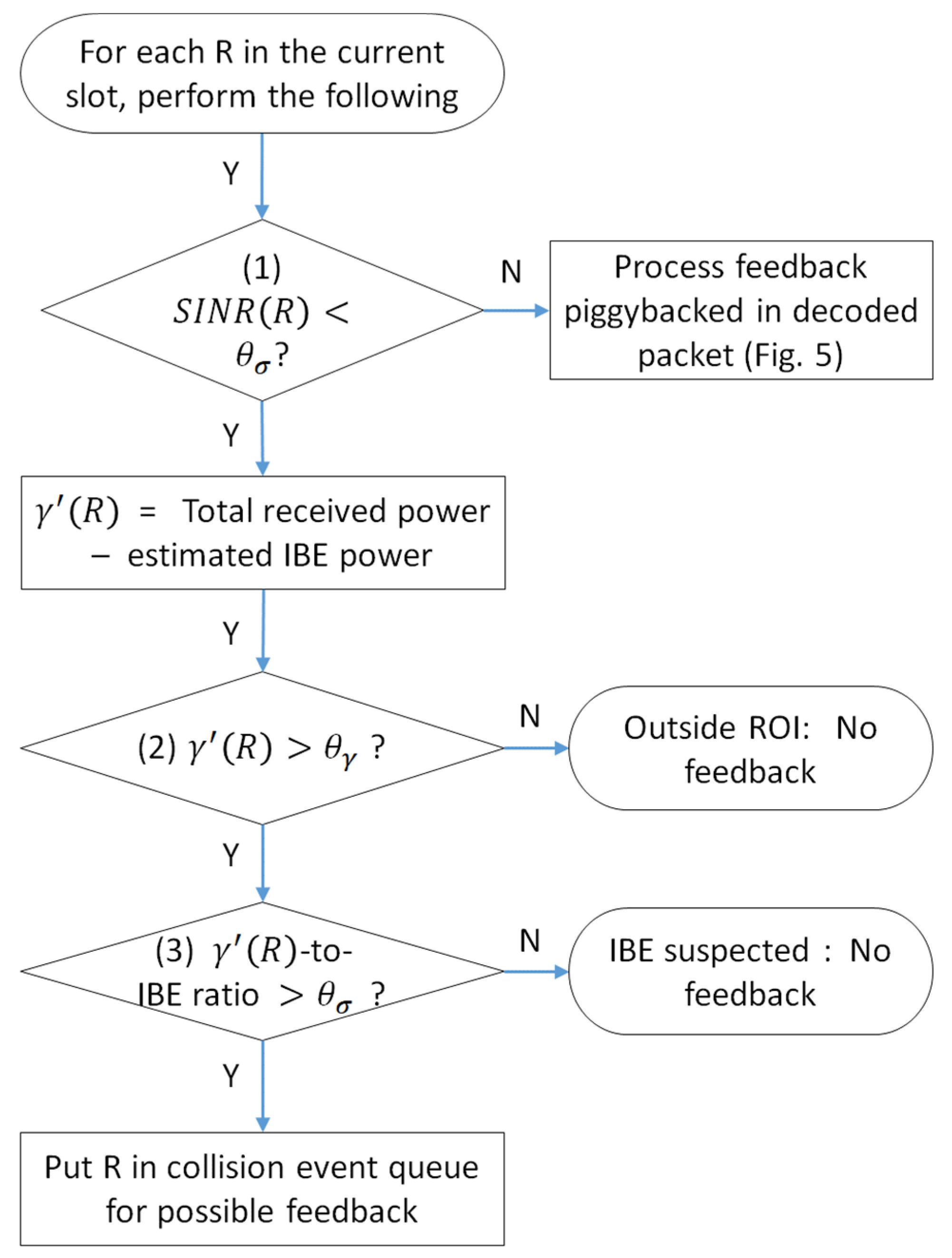
When a transmitted packet in a resource is not decoded, there are three possibilities. First, the absolute received power is below the reception threshold. This will most likely happen when the transmitter is far from the receiver. Second, the interference and noise power are relatively strong compared to the signal power. Third, a packet collision has occurred in the resource. From the perspective of the collision feedback provider, the first case means that it is probably not in the region of interest (ROI) of the colliding transmitters because the most safety-critical distance is typically much shorter than the C-V2X communication range [16]. The latter two possibilities, however, need to be closely examined. In fact, the primary responsibility of a candidate feedback provider is to distinguish between the two. Figure 2 shows the described logic.
To implement the logical flow in Figure 2, three conditions should be considered, which are marked as (1)–(3) in the flowchart. They are respectively related to the RSSI, SINR, and IBE. The SINR condition is used to distinguish collisions from successful transmissions. The RSSI condition is necessary to identify feedback provider (s) in the ROI of both the colliding transmitters. Finally, the IBE condition ensures that the suspected collision is not caused by an in-band emission.
3.2.1. Feedback Provider Qualification Based on Signal-to-Interference-and-Noise Ratio
An obvious necessary condition for the received transmission to be a collision is that the receiver fails to decode it. It happens when the signal to interference plus noise ratio (SINR) on the given resource R, denoted σ (R), falls short of a certain threshold θσ as given in inequality (1):
By using this condition, the logic disqualifies those receivers in the high SINR, high RSSI region in Figure 2 as a feedback provider. The threshold used in the condition is a function of the modulation and channel coding (MCS) among others. The SINR threshold can be obtained as Equation (2):
where m is the MCS level, B is the transport block size, ϕ is the parametric loss in the Shannon equation, and is the number of data bits per second per Hz, carried by the given MCS [17]. For instance, for MCS level 7 and the message size of 300 bytes used in the experiments, is 7.30 dB for [17].
3.2.2. Feedback Provider Qualification Based on Received Signal Strength Indicator
As to the question of which vehicles can report the witnessed collision event, the proposed feedback scheme limits them to those within a certain distance from the vehicles that transmitted the collided packets. This is because the closer the vehicle is, the more accurate the power-based assessment will be. Moreover, the main concern is in the proximity of the transmitter where the safety beacons play a more critical role (i.e., ROI) to prevent the crashes with the transmitting vehicle. The collisions in the closer range must be quickly resolved and have a higher priority over those in the fringe of the communication range where the hidden terminal problem is unavoidable. It should be avoided that the hidden terminal problem causes confusion so that a perfectly clean transmission is reported as a collision by a remote vehicle in the fringe. For this reason, the proposed scheme requires a broadcast receiver to sense a high RSSI on the given resource R (denoted γ (R)) to qualify for a feedback provider for the resource. Namely, if the receiving vehicle senses less power than a certain threshold in R, it is disqualified as a feedback provider.
One caveat in evaluating the RSSI on a particular resource is that γ (R) is the sum of two entities: received signal power from the transmitters and in-band emission (IBE) leaked from other subchannels in the same time slot (see Figure 3). Let γ’ (R) be the sum of the powers received purely from potentially colliding packets in R. Additionally, let be the ratio of the power leaked to subchannel j due to IBE from γ’ loaded on subchannel i ≠ j. The is a function of the distance between i and j on the frequency axis and of the modulation and channel coding (MCS) level among others. It can be empirically measured by actual transmission or determined based on a model [18]. Knowing the RSSI carried in each subchannel k in a time slot n and the coefficients α for nearby subchannels, a broadcast receiver can estimate the IBE-excluded received power of each resource as Equation (3):
where is the IBE leaked from subchannel i to k and is the power on the same subframe resource .
Then, the second necessary condition the proposed scheme requires for a vehicle to provide a collision feedback on resource is given in inequality (4),
where is the RSSI threshold. This condition disqualifies the receivers in the low RSSI region. In this paper, a threshold value = −85.2 dBm is used, which is approximately twice the power a receiver senses from the transmitter located just over 100 m away in the experimented channel model [18]. The double power requirement is to account for at least two colliding packets. In practice, the distance and the corresponding should be determined by the application requirements, such as in terms of the minimum required communication range for the given safety application [19].
Note that a too low and too high would increase false positives and false negatives, respectively. Among the two false classification errors, the false negative is less of a problem because multiple feedback providers will be available in most packet collision cases. This is because packet collisions increase with the channel utilization, which in turn is driven by increased vehicular population. Even if there is no qualified feedback provider, the proposed scheme can always fall back to the original SPS. In contrast, false positives will cause the transmitter to reselect resources unnecessarily, increasing the unpredictability in SPS and leading to more packet collisions [8].
3.2.3. Feedback Provider Qualification Based on In-Band Emission
Even if a received transmission satisfies the conditions of (1) and (3), the transmission still may not be a collision. It is because the conditions can be met under the influence of IBE when a vehicle much closer to the receiving vehicle transmits on an adjacent subchannel. Figure 4 depicts such a situation. The transmission from vehicle Z is free from a collision and strong enough so that , satisfying condition (3). However, in the same slot n, vehicle X also transmits from a much closer distance from Y. Then, a strong IBE from vehicle X can interfere with Z’s transmission received at Y so much so that the interference component in the SINR can become high enough to cause a decoding failure. For example, suppose is 30 dB higher than . If = 3.5%, the IBE power will be 35 times higher than the received power on , pulling down the SINR drastically to satisfy the condition (1). Therefore, if the IBE is not accounted for, false positives will trigger unnecessary collision feedbacks. In fact, the frequency of false feedbacks is observed to sharply increase without the IBE consideration [14]. Because this phenomenon may occur quite frequently under higher channel utilization levels due to more occupied adjacent subchannels, it is imperative to account for the IBE in the feedback generation logic.
To exclude the impact of IBE, one could simply require that those vehicles experiencing the sum of the IBE powers leaked on larger than a certain threshold be disqualified as a feedback provider. However, care should be taken in configuring the threshold because the SINR that the IBE affects in condition (1) is a ratio. Specifically, the IBE powers below the fixed threshold can still reduce the SINR significantly if is also small. Therefore, the IBE-filtering threshold should be based not on the absolute IBE power but on the ratio of the powers of the signal and the IBE. Specifically, the ratio should meet inequality (5),
where the denominator is the sum of all IBE power reaching the resource . Essentially, the left-hand side represents the SINR on except for the noise. Therefore, if the IBE caused the SINR condition (1) to be satisfied, condition (5) would contradict condition (1). On the other hand, if a collision caused condition (1) to be met, the sum power of the two colliding packets will overwhelm the IBE power, satisfying condition (5). Therefore, condition (5) filters out the IBE-induced decoding failures in the low SINR, high RSSI region, so as to suppress the feedback from the receiver under the influence of the IBE.
Note that our scheme is an opportunistic mechanism that assists SPS. In case the sum of the interference (i.e., the denominator) becomes too large by some environmental factors, the consequence would be that the vehicle in consideration is disqualified as a feedback provider. However, with the lack of the feedback, the system reverts to the vanilla SPS, and it does not adversely affect the operation of SPS. Moreover, if the vehicle traffic density is high, there can be multiple candidate feedback providers, so one (and only one) of them will provide the feedback. On the other hand, if the denominator is small, it will be a desirable condition because it means that the detected collision on the given resource is not being affected by IBE.
Algorithm 1 is the pseudo-code for the feedback provider qualification check that comprises conditions (1), (4), and (5) above. For each resource in every slot, a receiver performs the three checks discussed above. If they are met, the collision event is registered in the “feedback queue” (line 20). On the other hand, if the received packet can be decoded (line 10), the piggybacked feedback information (location of the collision suspected by the transmitter of the packet) is compared with the collision event entries in the feedback queue that the receiver has sensed so far (line 13). If there is a match, the entry is knocked out of the queue because it has just been feedbacked by another vehicle (line 14).
| Algorithm 1. Feedback provider qualifier (FPQ) |
| 1: procedure FPQ(n, Nsubch, α, Q)
2: n: current slot 3: Nsubch: no. of subchannels 4: α: IBE weight factor 5: Q: feedback queue 6: 7: for k = 1; k < Nsubch; k = k + 1 do 8: 9: 10: then 11: // condition(1): decoded − no feedback 12: 13: then 14: out 15: then 16: // condition (4): outside ROI − no feedback 17: then 18: // condition (5): IBE suspected – no feedback 19: else 20: enqueue(<k,n>, Q) // add the location to feedback queue |
3.3. Feedback Operation
Each vehicle executes two sides of the feedback logic:
3.3.1. Feedback Provider Side
When a vehicle is not transmitting, it monitors every resource to decode the packet therein. It uses Algorithm 1 to check for potential collisions, for which it registers the resource location in the feedback queue. When the vehicle transmits, however, it executes Algorithm 2 shown below instead of Algorithm 1. Namely, it dequeues the first entry of the feedback queue (line 6) and includes it in the packet to transmit (line 7). Then, the feedback queue is flushed (line 8).
| Algorithm 2. Feedback queue management (FQM) |
| 1: procedure FQM()
2: n: current slot 3: Q: feedback queue 4: 5: if n is the slot to transmit in then 6: dequeue(Q) // feedback only the first one 7: in the packet to transmit 8: flush(Q) |
Figure 5 exemplifies how Algorithms 1 and 2 operate in terms of the feedback queue management. In the example, the ego vehicle has detected and registered seven collision resource locations (Algorithm 1, line 20) from A to G since its last transmission (a). While receiving other vehicles’ transmissions, it examines the piggybacked collision feedback information and removes the collision resource locations in its queue that are reported by other vehicles first (Algorithm 1, line 14) (b). For instance, resource locations A, C, D, and F are reported by other vehicles, so they do not have to be reported again by this vehicle. This results in the vehicle knocking them out. Immediately before the transmission by this vehicle, there are three remaining locations, B, E, and G, which have not been feedbacked in other vehicles’ transmissions. Among these, it dequeues the first entry and piggybacks the feedback on its own data transmission (c) while flushing the entire feedback queue again (Algorithm 2) (d). The feedback and queue flushing operation repeats at each transmission by the ego vehicle.
There are three reasons why the transmitter only broadcasts the oldest un-feedbacked collision event. First, in most cases, the collision feedback queue is short because the feedback operation is performed for every packet transmission by every vehicle. The simulation shows that a single feedback is usually enough to empty the queue after the purging is triggered by the other vehicles (Algorithm 1, line 14). Second, the flushed entries without feedback can have additional chances at other vehicles. For example, G and E that were not feedbacked by the ego vehicle can still be feedbacked by other vehicles that also observed these collision events. Finally, it is to minimize the overhead of feedback signaling, as there is inadequate space to piggyback a multiple of them in the transmitted packet. This issue is discussed in Section 3.4.
3.3.2. Feedback Consumer Side
When every broadcast receiver processes a broadcast packet, it examines any feedback information piggybacked on it. If the feedback points to the resource in which the receiving vehicle transmitted earlier, the vehicle immediately commences the standard SPS resource reselection procedure even if the resource reservation counter (RC) has not reached zero. Due to the broadcast feedback, the resource reselection is invoked at all the vehicles that caused the given packet collision event. The persistent collision is thus terminated as soon as a third vehicle provides collision feedback. The next section discusses how piggybacking can be implemented in the current standard framework.
3.4. Feedback Implementation
The feedback information is not separately transmitted, but piggybacked in an already scheduled broadcast message (e.g., BSM) transmission. For this purpose, the SCI in the PSCCH can be utilized. For example, if the first entry in the collision feedback queue points to the resource location φ = <m, k + 1>, the location is included in the SCI of the first transmitted packet, in slot n > m (Figure 6).
In NR V2X, up to Nmax−1 additional resource reservation pointers can be used in the SCI Stage I, where Nmax =3 [6]. Among Nmax, one points to the initial transmission, whereas the others point to the retransmission resources associated with the SCI. In the NR SCI Format 1 shown in Figure 7a, the Frequency resource assignment field includes the frequency coordinates of the pointers. The size of the Frequency resource field L depends on the number of resource pointers to use. If Nmax = 2, , where NsubCH is the number of subchannels. If Nmax = 3, . The particular Nmax value to be used is configured by the higher layers. Paired with the frequency resource assignments, the Time resource assignment field specifies the time coordinates of the reserved resources. It is M = 5 bits for Nmax = 2, and M = 9 bits for Nmax = 3 [2].
In the current standard specification for NR V2X, the additional pointers are specified to point to the reserved resources for potential future HARQ-based retransmissions within 31 slots or approximately 15 ms. However, there have also been proposals to use the two pointers more ingeniously. For instance, a recent proposal in 3GPP emphasizes that the reservation of a sidelink resource for an initial transmission of a different TB should be applicable [20]. Extending this line of thought, the proposed scheme utilizes one of these pointers, but to point to a collision resource location in the past. When the pointer to the retransmission resource is not used, it can be used for the resource pointer by setting Nmax = 2. If the retransmission resource is reserved by default, the third pointer can be used for the same purpose by setting Nmax = 3. In addition, one more bit is needed to signal that it is a feedback on a collision event, most likely from the Reserved field. In LTE V2X, there is one pointer that can be used for a blind retransmission resource [21] (Figure 7b), which can be utilized for the collision pointer when the blind retransmission is not used. If a pointer cannot be made available for the collision reporting purpose at all, however, another implementation strategy could be to use the Reserved field. As the C-V2X standard is still evolving, exploring this possibility is left for a future work. However, note that the scheme is an opportunistic enhancement that aims at improving the baseline SPS performance. Whenever there is a space for a single collision pointer left unused by the employed retransmission, the proposed scheme can utilize it to provide the feedback. It does not need to take precedence over retransmissions to rob the pointer space from it.
4. Consecutive Error Prevention Performance: Evaluation
This section evaluates the reliability improvement that the proposed collision feedback scheme can bring if it is allowed to use a collision pointer in the SCI of the transmitted packet. First, the duration and the number of consecutive packet collision events are compared in the original SPS and the proposed scheme. To put the proposed scheme in a broader perspective, the average PRR is also measured. In the comparison, the alternating reservation scheme [9] and the blind retransmission from the LTE/NR V2X standards [2,11], as well as SPS, are included.
4.1. Experiment Assumptions
The open-source simulator LTEV2Vsim [18] is used for the simulations, which implements an IBE model. Winner+ B1 is used as the channel model [22] and a 10 MHz band allocated for the sidelink channel is assumed. A 300-byte for the basic safety message (BSM) size is assumed, including the security credential as recommended for evaluation experiments by Hsu et al. [23]. Given the 2400-bit transport block size (TBS) that accommodates the 300-byte BSM in addition to the SCI overhead, the TBS index of ITBS = 7 is used, which can carry 2472 bits with the coding rate of 0.55. With ITBS = 7, the number of required physical resource blocks (PRBs) is 20 for the payload. Since 2 more PRBs are necessary for the SCI, a single BSM needs 22 PRBs. Since there are 50 PRBs, two subchannels can be allocated in a 10 MHz channel, so . Therefore, the MCS level is set to 7. The SCI and TB of a single message are assumed to be adjacent, but the alternative non-adjacent configuration does not affect the proposed scheme. Vehicles transmit the BSM once every 100 ms, and the resource keep probability Pk used in the resource reselection process is set to 0.8 to give SPS the maximum resource use predictability. Vehicles are deployed according to the 1-D Poisson point process along a straight highway road of 3 km. Vehicle traffic density ρ is varied across 100, 150, 200, and 250 vehicles per km. These traffic densities were selected to load the wireless channel in the approximately 50–80% range as shown in Table 1 (center column), which the J2945/1 congestion control algorithm considers desirable as the channel load [24]. Note that adding a single blind retransmission per each transmission does not double the CBR due to increased packet collisions.
The Tx power is set to 23 dBm, and the thresholds for SINR and RSSI conditions in the inequalities (1) and (3) used for feedback condition determination are 7.3 dB and −85.2 dBm, respectively. In particular, the SINR threshold is for the MCS level 7 [17]. Under these conditions, the rate α of power leakage to other channels is 0.35%, which suffices to compute the IBE at NsubCH = 2. Note that for a fair comparison, the BSM size is set at 300 bytes for all schemes whereas Jung et al. [9] set it to 190 bytes. Additionally, the initial RSRP threshold is set to −110 dBm, used for the LTE/NR V2X SPS resource selection procedure as per the LTE-V2X and NR V2X standards [2,11] whereas [9] set it to −120 dBm. For the SPS resource reselection algorithm, the standard values for Sidelink Mode 4, as specified in TS 36.213 [11], is used. Table 2 summarizes the simulation settings.
4.2. Duration of Consecutive Collisions
The main objective of the feedback scheme is to shorten the duration of the consecutive collision events through the broadcast feedback, so that vehicles can avoid the loss of awareness among its neighbors. Evaluating the impact of the proposed scheme in terms of the duration of such events needs a careful definition of the metric because the duration obviously depends on the Tx-Rx distance. Namely, the farther a receiver is from the broadcast transmitter, the longer the average duration of packet losses will be. Therefore, the packet “collision” is defined as an event in which two vehicles physically positioned within a pre-defined, application-specific distance simultaneously use the same frequency resource to transmit their BSMs. In this paper, the distance is set to 100 m. In NR V2X, a transmitter can specify the required communication range in SCI Format 2B [6]. Thus, in practice the feedback providers may instead apply application-specific thresholds for the three checking conditions in the previous section.
Figure 8 shows the average consecutive packet collision duration once a collision event takes place, assuming the 10 Hz beaconing by vehicles. Note that the y-axis is in log scale. First observe in the figure that regardless of the traffic density, the average duration of the consecutive collisions in the standard SPS ranges between 2000 ms and 2500 ms. They are an order of magnitude longer than in the proposed scheme (“SPS + colFeedback”) or in the alternating transmission scheme (“SPS + alternating”). The standard blind retransmission is expected to have a similar duration as the alternating scheme, but it has an excessive bandwidth requirement that it cannot be used when the channel utilization is as high as assumed in Table 1 (i.e., higher than 50%). So, the discussion of the blind retransmission scheme is deferred until Section 4.4.
Analyzing the SPS performance itself is a major undertaking that has not been done so far in the literature. Moreover, analyzing SPS is not the focus of this paper so this paper does not attempt a precise analysis of the long consecutive packet collision durations of SPS. However, an explanation through a first-order approximation can be readily given as follows. Let us call the consecutive packet transmissions by a vehicle using the same frequency resource until the resource reselection counter (RC) reaches zero by a “packet run,” having a uniform random variable Xi as the run length where i is the index of the run. The RC for the i-th run is initialized to a standard-specified value upon a resource reselection. For instance, if the resource reservation period (RRP) is 100 ms (see Figure 7a), 5 ≤ Xi ≤ 15. It is decremented on every packet transmission in the run. At a given resource keep probability Pk, the number l of packet runs that retain the same frequency resource at a vehicle is geometrically distributed, whose mean is given by the Equation (6).
Suppose l1 and l2 are the numbers of such consecutive packet runs from two different vehicles colliding on the same resource at the same periodicity. Because what matters most is the packet collisions within a safety-critical distance, one can assume that the vehicles are within a mutual communication range. If one vehicle sees that another is already using a frequency resource, it will not select it under SPS. Therefore, any colliding runs should start simultaneously. Thus, the colliding span will be determined by the shorter length of the two, min {l1, l2}. Although it may happen that l1 < l2 with , the probability becomes increasingly smaller as l becomes larger. This is because tends to a normal distribution centered at . For the two geometrically distributed random variables with parameter p = 1 − Pk, the minimum and the maximum are given as in Equations (7) and (8), respectively.
At p = 0.2 (i.e., Pk = 0.8), the shorter of the two is averaged at = 2.778 runs. The longer, on the other hand, is averaged at = 10-2.778 = 7.222 runs. With such a difference, the Irwin–Hall distribution tells us that the probability of the smaller number of runs having a larger number of packets is small. So, one can approximately estimate the number of colliding packets as , which is 27.78 packets. It is equivalent to 2.778 s in time span at 10 Hz beaconing, which to a first-order approximation agrees with the result in Figure 8. Note that this can be a critical time in V2X communication, as it can lead to serious problem where two or more cars become “invisible” [14] to the neighbors on the wireless channel.
The performance of the two other schemes starkly contrasts with SPS. In the SPS + alternating scheme, which alternates between two resources, the chances of packet collisions in both frequency locations with another vehicle should be slim. Therefore, the vast majority of collision events are composed of single packet losses, as Figure 8 confirms. Although this scheme successfully fragments a possibly long consecutive packet loss event in SPS into interspersed single losses so that the invisibility problem is practically resolved, it does not terminate the persistently occurring collisions as the SPS + colFeedback scheme does. Namely, the loss-every-other-packet behavior will continue until the next resource reselection. Consequently, Section 4.4 will show that the PRR performance of the scheme is adversely affected. In comparison, the performance of the proposed SPS + colFeedback scheme has a slightly larger average collision duration than SPS + alternating. However, the difference tapers as the traffic density increases. It suggests that the larger duration under lower traffic densities in this scheme is due to the relatively low availability of the feedback providers. As the traffic density increases, so does the availability. The collision event converges to a single packet loss in this scheme as well. Note that the SPS + colFeedback scheme falls back to SPS when there is no feedback provider available in the vicinity of the two vehicles whose packets collide. It will mostly happen under very low traffic densities where the resource collisions will be rare events anyway. Even in the absence of the broadcast feedback, they will still be resolved by the reselections in the standard SPS algorithm, although not as promptly as with the feedback.
4.3. Number of Packet Collisions
Figure 9a shows the number of collision events. Again, the y-axis is in log scale. As can be predicted, the number of collision events in the SPS + alternating scheme is orders of magnitudes higher than in SPS and SPS + colFeedback, as it fragments an SPS collision event into multiple single-packet collisions. In contrast, the SPS + colFeedback scheme is generally comparable to the original SPS because it modifies only the length of the event by terminating it through a prompt reselection. However, it is visibly higher than in SPS for the highest traffic density, ρ = 250. This is because resource reselections performed upon collision events increase the unpredictability for SPS [8], hence increased collisions especially for the high traffic density. However, when the traffic density is low, it has a positive effect of decreasing the overall number of collision events thanks to fast reselections away from the collision resources, which can more evenly spread the packet transmissions across the resource plane.
Figure 9b sums up Figure 8 and Figure 9a. It shows the total number of collided packets, which is the product of the number of collision events and the number of individual collisions in each event. Notice that the SPS + alternating scheme does not reduce the number of collisions compared to SPS, but increases it. It is because the scheme selects two resources upon reselection, which can be easily shown to increase the collision probability. Recollect that in SPS, a packet collision event mostly takes place when two (or more) vehicles re-select the frequency resource almost at the same time because otherwise, vehicles know the resources that neighboring vehicles will use through the chain reservation using the RRI field in the received SCI. Two (or more vehicles) finishing using the current frequency resource and concurrently re-selecting a new resource do not notify each other about their resource choice for the next run. Thus, they may select the same resource, i.e., a resource collision. As the SPS resource selection procedure, common to both methods (SPS, SPS + alternating), randomly selects the next resource from the 20% (in LTE [11]; configurable in NR [2]) of the least utilized resources in the selection window, one can easily derive the collision probability of SPS and SPS + alternating. Assume for simplicity that there are r resources in the same selection window that v (≥ 2) vehicles reselect their next resource from. In SPS, the probability that there is a collision in a resource that a vehicle selects is given in Equation (9).
In SPS + alternating, the probability that there is a collision in at least one of the two selected resources is given as in Equation (10) and it is larger than the native SPS collision probability.
Figure 10 exemplifies how SPS + alternating increases the collision probability with some selected values of r and v. In essence, the probability of a vehicle selecting a resource that other vehicles may have selected increases. Although it may help mitigate the long invisibility problem due to persistent collision, it is at the cost of the increased packet collisions. In contrast, Figure 9b shows that the SPS + colFeedback scheme has more than an order of magnitude smaller number of collided packets than SPS. This is because the number of colliding packets is reduced from = 27.78 packets (Equation (6)) to less than two packets per event (Figure 8).
In summary, the collision feedback scheme successfully solves the persistent collision problem, while decimating the absolute number of collided packets. These desirable properties are maintained over a wide range of traffic densities.
4.4. Packet Reception Ratio
Having explored their effectiveness in preventing consecutive packet collision events, it is necessary to investigate how the compared schemes fare in the overall performance measure of PRR. But before starting this section, it is important to emphasize again that improving the average PRR is not the objective of this paper. Instead, it is necessary to improve the consecutive loss characteristics of the V2V transmission without harming the average PRR. Any gain on PRR is obtained should be considered as not what is intended but a good side effect. Therefore, the objective here is to ascertain that the proposed scheme does not sacrifice the PRR performance to achieve the shorter lengths of consecutive packet collisions.
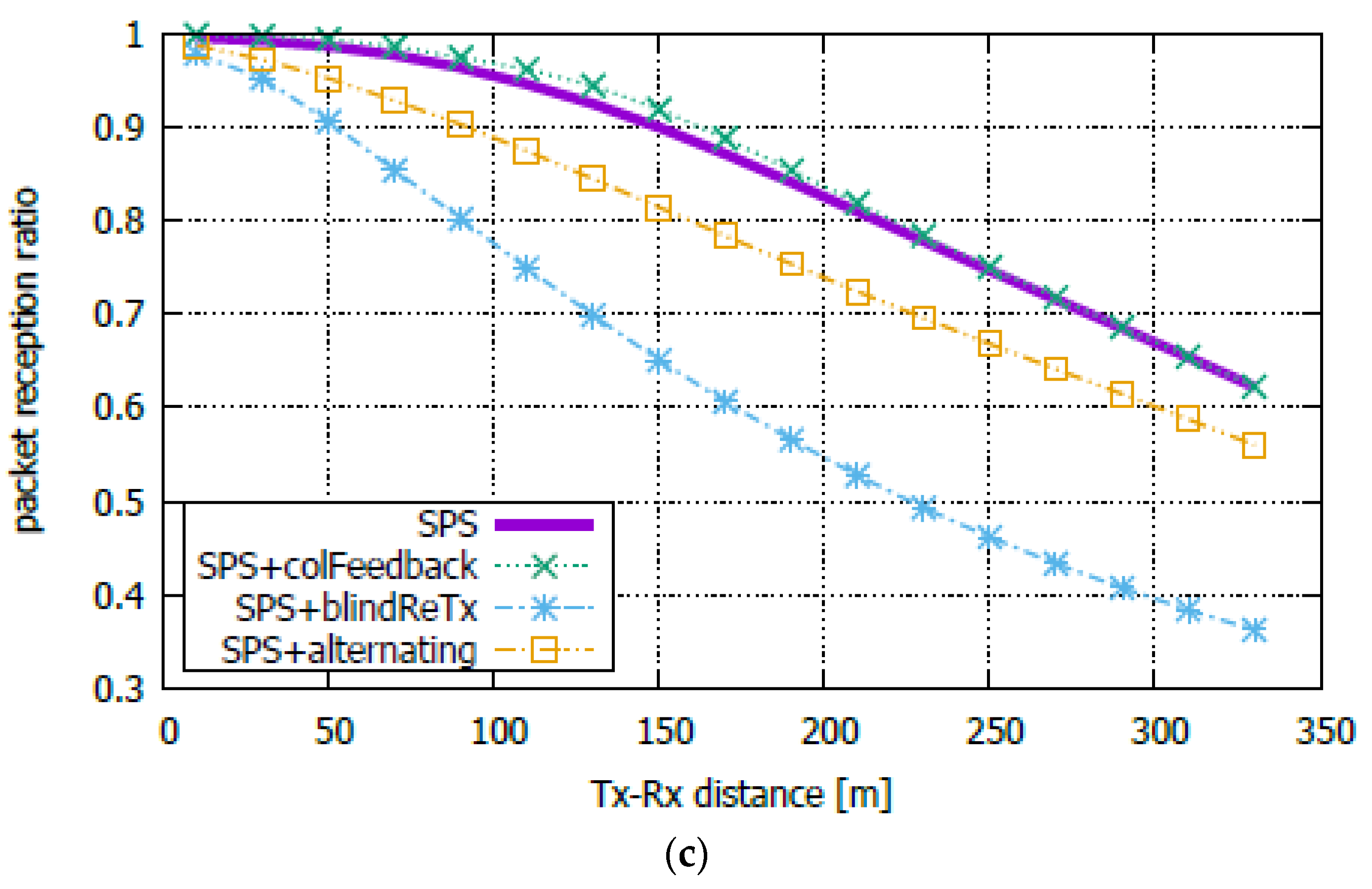
Figure 11 shows the PRR performance as a function of the Tx-Rx distance under three different traffic densities. In particular, if the transmitter at the relative position 0, the SPS + colFeedback scheme will provide the feedback so that it can prevent further colliding packets.
First observe in the figure that in all tested traffic densities, the use of the collision feedback does not deteriorate the PRR, but instead very slightly improves it over SPS especially in the shorter Tx-Rx distances. It owes to the side-effect of spreading the transmission more evenly over the resource plane through prompt reselections upon collision. The reason that the PRR improvement is confined to the shorter distances is that the RSSI threshold is set so that only the feedbacks from approximately within 100 m of the packet-colliding vehicles are allowed (inequality (3)). Therefore, it will mainly resolve the collision-induced losses sensed in the shorter distances from the transmitter.
Compared with the SPS + colFeedback scheme, the SPS + alternating scheme and the standard blind retransmission scheme exhibit worse PRR performance than the original SPS. The reason for the former is the significantly increased packet collision probability as illustrated in Figure 10. The blind retransmission scheme is the worst and deteriorates fast as the traffic density increases. It is because it requires double the bandwidth, which becomes increasingly more difficult to afford under higher channel utilization (Table 1, right column). Nevertheless, the blind retransmission scheme cannot be dismissed as useless because retransmissions can be helpful at shorter TX-RX distances, which is the most safety-critical region. For instance, power control can be associated with the blind retransmission so that it can obtain the high PRR without persistent packet collisions by reducing the transmit power so that the spatial footprint is reduced. In that case, the overall PRR may not be the best metric to evaluate the value of the blind retransmission. Unfortunately, congestion control is a major topic in itself and the C-V2X standards are still immature. Therefore, it will be worthwhile to explore in the future topic of blind retransmission as a tool to resolve the persistent packet collisions in association with a power control.
In summary, the proposed feedback scheme effectively solves the persistent collision problem while not hurting the overall packet reception probability over the distance. This feature of broadcast feedback to the previous broadcast transmission has not been actively considered in the literature or the standard framework, but if carefully designed and implemented it can be a useful tool in making the broadcast-oriented safety communication more reliable in C-V2X. Packet collisions are the biggest source of packet loss in the most safety-critical distances from the transmitter [25], and the broadcast collision feedback can prove to be highly relevant. Furthermore, the proposed scheme works as an opportunistic enhancement but not a replacement to the standard SPS algorithm, so it would also be gracefully introduced in the evolution of the standard framework.
5. Conclusions
In LTE V2X Sidelink Mode 4 and NR V2X Mode 2 that utilize SPS for resource allocation, packet collisions may last for seconds on end if two or more transmitters select the same resource, which can be concerning for driving safety. As HARQ feedback is not supported for broadcast transmission in either LTE V2X or NR V2X, the half-duplex transmitters by themselves cannot realize the packet losses induced by the persistent packet collisions. This paper proposes a feedback scheme for the broadcast traffic. Because broadcast receivers can lie in various distances and channel conditions, in principle they can provide conflicting feedbacks as to whether a packet collision actually occurred. This is one of the reasons why the current standard framework has not specified a broadcast feedback mechanism. However, this paper demonstrates that designing an effective broadcast feedback mechanism is feasible. The keys to designing one is to first define the region of interest, then understand the relations between RSSI, SINR, and IBE conditions for the feedback provider. Extensive simulation shows that a carefully designed feedback scheme can indeed solve the persistent packet collision problem by practically eradicating them while maintaining the packet reception ratio. Finally, by way of reserved bits or the reservation pointers in the SCI, the proposed scheme can be implemented without excessively modifying the current standard cellular V2X framework. As the safety communication in V2X heavily depends on the broadcast transmission, the proposed scheme that improves its reliability can be a small but significant building block. In the future, further work is necessary to expand the application of the proposed feedback scheme to other problems in broadcast V2X communications, such as half-duplex and hidden-terminal problems.
Author Contributions
Conceptualization, H.K. and Y.Y.; methodology, H.K..; software, Y.Y.; validation, H.K. and Y.Y.; formal analysis, H.K.; investigation, Y.Y.; resources, Y.Y.; data curation, H.K.; writing, H.K.; visualization, Y.Y.; supervision, H.K.; project administration, H.K.; funding acquisition, H.K. Both authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIT) (No. 2020R1A2C3011888).
Data Availability Statement
Not applicable, the study does not report any data.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
References
- 3rd Generation Partnership Project. Technical Specification Group Radio Access Network; NR; NR and NG-RAN Overall Description; Stage 2 (Release 16); 3GPP TS 38.300; ETSI: Sophia Antipolis, France, 2020. [Google Scholar]
- 3rd Generation Partnership Project. Technical Specification Group Radio Access Network; NR; Physical Layer Procedures for Data (Release 16); 3GPP TS 38.214; ETSI: Sophia Antipolis, France, 2020. [Google Scholar]
- 3rd Generation Partnership Project. Technical Specification Group Radio Access Network; NR; Medium Access Control (MAC) Protocol Specification (Release 16); 3GPP TS 38.321; ETSI: Sophia Antipolis, France, 2020. [Google Scholar]
- Dedicated Short Range Communications (DSRC) Message Set Dictionary; SAE J2735; SAG: Warrendale, PA, USA, 2016.
- Bazzi, A.; Campolo, C.; Molinaro, A.; Berthet, A.O.; Masini, B.M.; Zanella, A. On Wireless Blind Spots in the C-V2X Sidelink. IEEE Trans. Veh. Technol. 2020, 69, 9239–9243. [Google Scholar] [CrossRef]
- 3rd Generation Partnership Project. Technical Specification Group Radio Access Network; NR; Multiplexing and Channel Coding (Release 16); 3GPP TS 38.212; ETSI: Sophia Antipolis, France, 2020. [Google Scholar]
- 3rd Generation Partnership Project. NR; Radio Resource Control (RRC); Protocol Specification (Release 16); 3GPP TS 38.331; ETSI: Sophia Antipolis, France, 2020. [Google Scholar]
- Molina-Masegosa, R.; Gozalvez, J.; Sepulcre, M. Comparison of IEEE 802.11p and LTE-V2X: An evaluation with periodic and aperiodic messages of constant and variable size. IEEE Access 2020, 8, 121526–121548. [Google Scholar] [CrossRef]
- Jung, S.; Cheon, H.; Kim, J. Reducing Consecutive Collisions in Sensing Based Semi Persistent Scheduling for Cellular-V2X. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019. [Google Scholar]
- Jeon, Y.; Kim, H. An explicit reservation-augmented resource allocation scheme for C-V2X sidelink mode 4. IEEE Access 2020, 8, 147241–147255. [Google Scholar] [CrossRef]
- 3rd Generation Partnership Project. Evolved Universal Terrestrial Radio Access (E-UTRA); Physical Layer Procedures (v14.3.0, Release 14); 3GPP TR 36.213; ETSI: Sophia Antipolis, France, 2017. [Google Scholar]
- Wendlend, P.; Schaefer, G. Feedback-Based Hidden-Terminal Mitigation for Distributed Scheduling in C-V2X. In Proceedings of the 2020 IFIP Networking Conference (Networking), Paris, France, 22–26 June 2020. [Google Scholar]
- ETSI. Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 2: Specification of Cooperative Awareness Basic Service, ETSI EN 302 637-2 V1.3.1; ETSI: Sophia Antipolis, France, 2014. [Google Scholar]
- Yoon, Y.; Kim, H. An Evasive Scheduling Enhancement Against Packet Dropping Attacks in C-V2X Communications. IEEE Comm. Lett. 2021, 25, 392–396. [Google Scholar] [CrossRef]
- Yoon, Y.; Kang, J.; Kim, H. Persistent Scheduling with Broadcast Feedback for Cellular V2X Communication. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021. [Google Scholar] [CrossRef]
- 5G Americas. Cellular V2X Communications towards 5G. March 2018. Available online: http://www.5gamericas.org/wp-content/uploads/2019/07/2018_5G_Americas_White_Paper_Cellular_V2X_Communications_Towards_5G__Final_for_Distribution.pdf (accessed on 13 August 2021).
- Bazzi, A.; Zanella, A.; Masini, B.M. Optimizing the resource allocation of periodic message with different sizes in LTE-V2V. IEEE Access 2019, 7, 43820–43830. [Google Scholar] [CrossRef]
- Bazzi, A.; Cecchini, G.; Menarini, M.; Masini, B.M.; Zanella, A. Survey and perspectives of vehicular Wi-Fi versus sidelink cellular-V2X in the 5G era. Future Internet 2019, 11, 122. [Google Scholar] [CrossRef] [Green Version]
- Cecchini, G.; Bazzi, A.; Masini, B.M.; Zanella, A. LTEV2Vsim: An LTE-V2V Simulator for the Investigation of Resource Allocation for Cooperative Awareness. In Proceedings of the 2017 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Naples, Italy, 26–28 June 2017. [Google Scholar] [CrossRef]
- 3rd Generation Partnership Project. Enhancement of 3GPP Support for V2X Scenarios; Stage 1 (Release 16); 3GPP TS 22.186; ETSI: Sophia Antipolis, France, 2019. [Google Scholar]
- Intel Corporation. Design of Resource Allocation Mode-2 for NR V2X Sidelink Communication. 3GPP TSG RAN WG1 Meeting 99, R1-1912205; ETSI: Sophia Antipolis, France, 2019. [Google Scholar]
- 3rd Generation Partnership Project. Evolved Universal Terrestrial Radio Access (E-UTRA); Multiplexing and Channel Coding (v.15.3.0, Release 15); 3GPP TS 36.212; ETSI: Sophia Antipolis, France, 2018. [Google Scholar]
- 3rd Generation Partnership Project. Study on LTE-Based V2X Services (v14.0.0, Release 14); 3GPP TR 36.885; ETSI: Sophia Antipolis, France, 2016. [Google Scholar]
- Hsu, C.-J.; Fikentscher, J.; Kreeb, R. Development of potential methods for testing congestion control algorithm implemented in vehicle-to-vehicle communications. Traffic Inj. Prev. 2017, 18, 51–57. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Molina-Masegosa, R.; Sepulcre, M.; Gozalvez, J. Geo-based scheduling for C-V2X networks. IEEE Trans. Veh. Technol. 2019, 68, 8397–8407. [Google Scholar] [CrossRef] [Green Version]
Figure 1.
Vehicles X and Y decide to reselect a frequency resource R_k^n’, leading to a persistent collision event.
Figure 1.
Vehicles X and Y decide to reselect a frequency resource R_k^n’, leading to a persistent collision event.

Figure 2.
Logic to determine whether to provide a feedback at the broadcast receiver.

Figure 3.
In-band emission (IBE)-induced interference from other subchannels.

Figure 4.
In-band emission from a much closer vehicle.

Figure 5.
Feedback queue management example: only B is reported as the collision resource.

Figure 6.
Feedback information in SCI pointing to the resource location of the suspected packet collision.
Figure 6.
Feedback information in SCI pointing to the resource location of the suspected packet collision.


Figure 8.
Average consecutive packet collision duration; 95% confidence interval, y-axis in log scale.
Figure 8.
Average consecutive packet collision duration; 95% confidence interval, y-axis in log scale.

Figure 9.
Performance comparison: (a) number of consecutive collision events; (b) number of individual collisions, y-axis in log scale.
Figure 9.
Performance comparison: (a) number of consecutive collision events; (b) number of individual collisions, y-axis in log scale.

Figure 10.
Increased collision probability with SPS + alternating.

Figure 11.
Packet reception ratio comparison. (a) ρ = 100; (b) ρ = 150; (c) ρ = 200.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Channel busy ratio (CBR) for various traffic densities.
| ρ | CBR (SPS) | CBR (SPS + Blind ReTx) |
|---|---|---|
| 100 | 45.94% | 69.45% |
| 150 200 250 | 62.85% 74.44% 83.03% | 84.30% 92.68% 96.45% |
Table 2.
Simulation parameters and their default values.
| Parameter | Default Value | |
|---|---|---|
| PHY | Channel model Channel bandwidth MCS level No. of subchannels Transmit power IBE ratio (α) | Winner+ B1 10 MHz 7 2 23 dBm 0.0035 |
| Application | BSM size BSM rate | 300 bytes 10 Hz |
| SPS | Sensing window size Selection window size Resource reselection counter Resource keep prob. (Pk) Initial RSRP threshold | 1 s 100 ms [5:15] 0.8 −110 dBm |
| Road | Road topology Road length Vehicle density Vehicle distribution | Highway, straight 3 km [100:250] veh./km 1-D Poisson point process |
| Feedback algorithm | RSSI threshold SINR threshold | −85.2 dBm 7.3 dB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Yoon, Y.; Kim, H. Resolving Persistent Packet Collisions through Broadcast Feedback in Cellular V2X Communication. Future Internet 2021, 13, 211. https://0-doi-org.brum.beds.ac.uk/10.3390/fi13080211
AMA Style
Yoon Y, Kim H. Resolving Persistent Packet Collisions through Broadcast Feedback in Cellular V2X Communication. Future Internet. 2021; 13(8):211. https://0-doi-org.brum.beds.ac.uk/10.3390/fi13080211
Chicago/Turabian StyleYoon, Youngjoon, and Hyogon Kim. 2021. "Resolving Persistent Packet Collisions through Broadcast Feedback in Cellular V2X Communication" Future Internet 13, no. 8: 211. https://0-doi-org.brum.beds.ac.uk/10.3390/fi13080211
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.