
Configuration of Electric Vehicles for Specific Applications from a Holistic Perspective



Abstract
:1. Introduction
2. Material and Methods
- Phase 1: For the given application, monitor the current operation of the fossil-fueled vehicles for a long period to determine their real driving patterns and operational conditions.
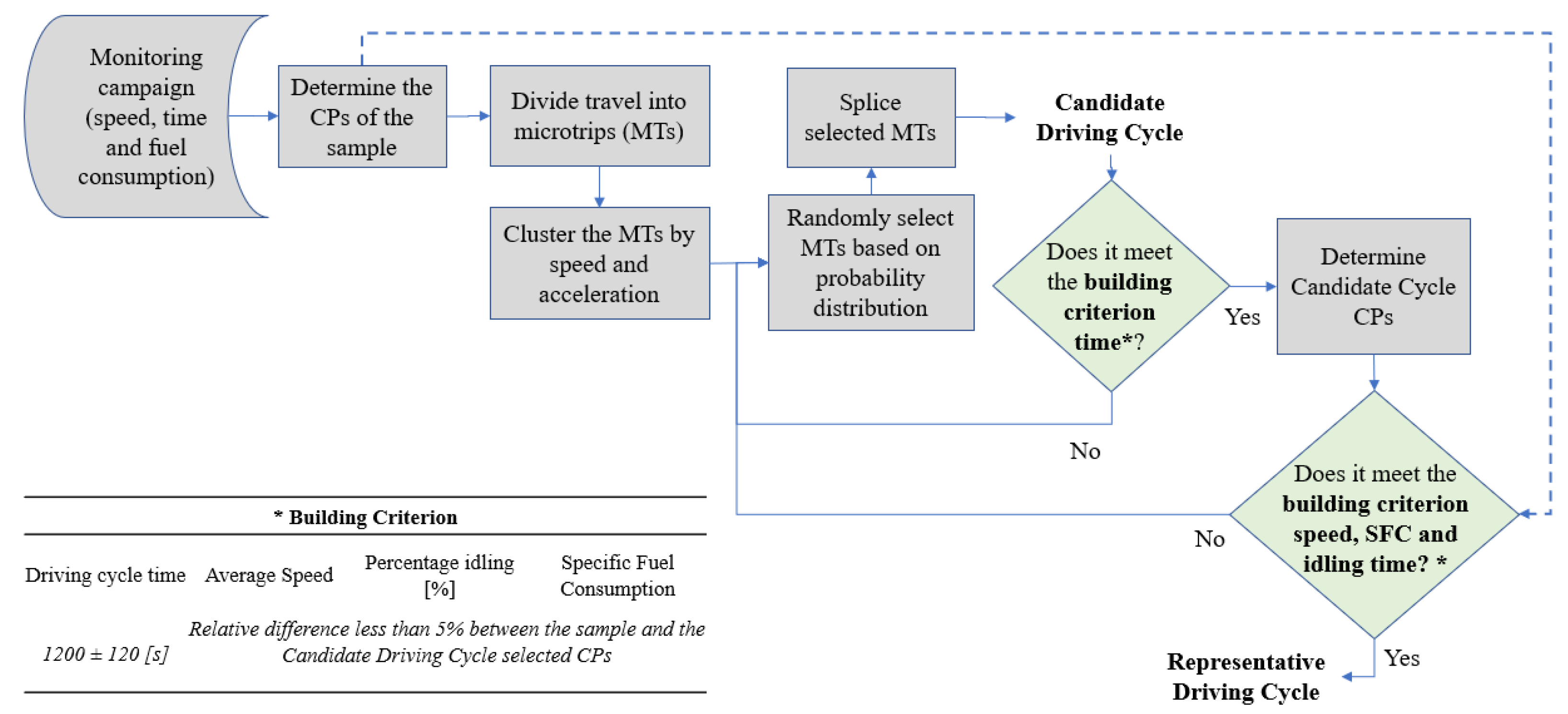
- Phase 2: Use the collected data to construct a representative real-world driving cycle.
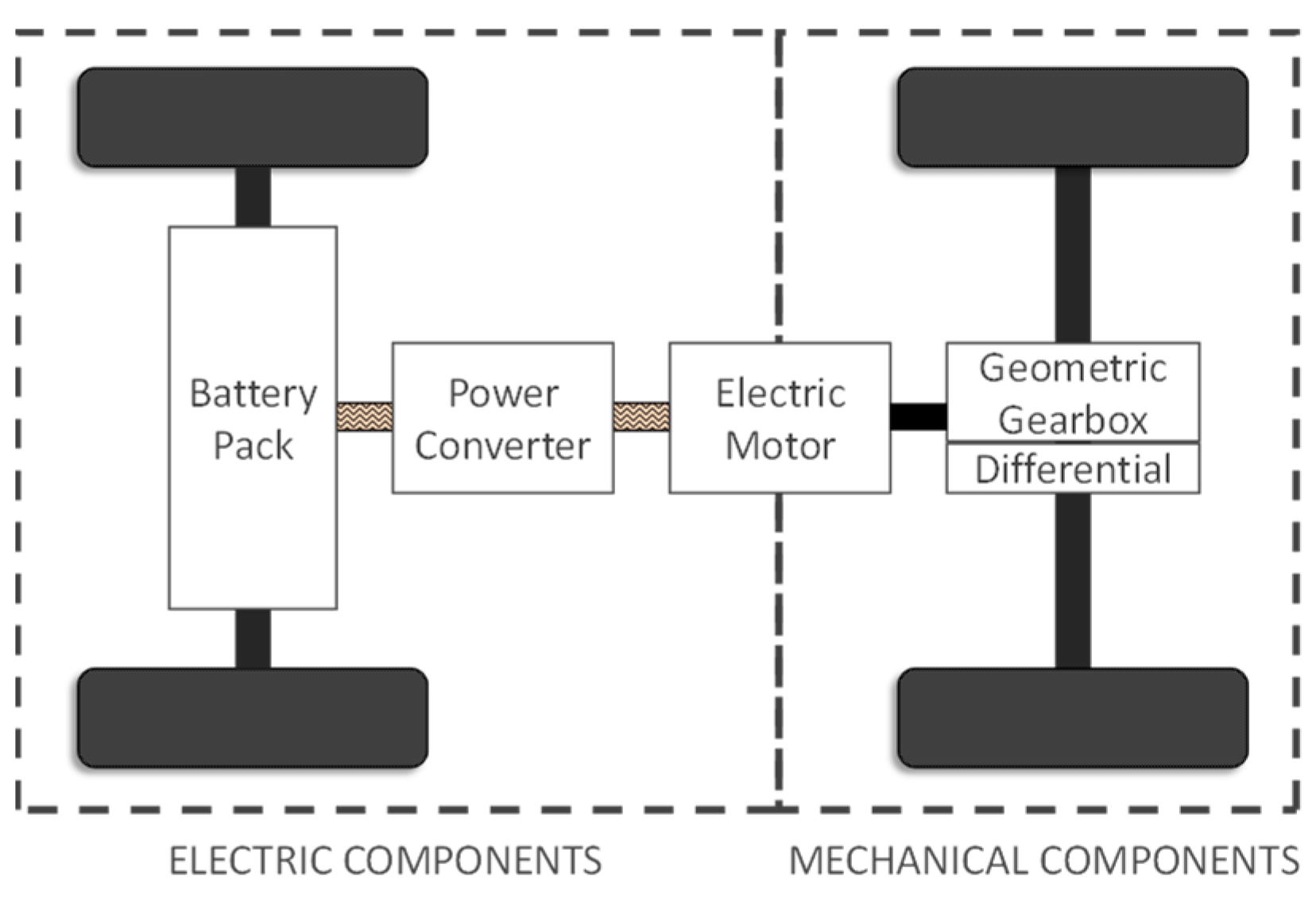
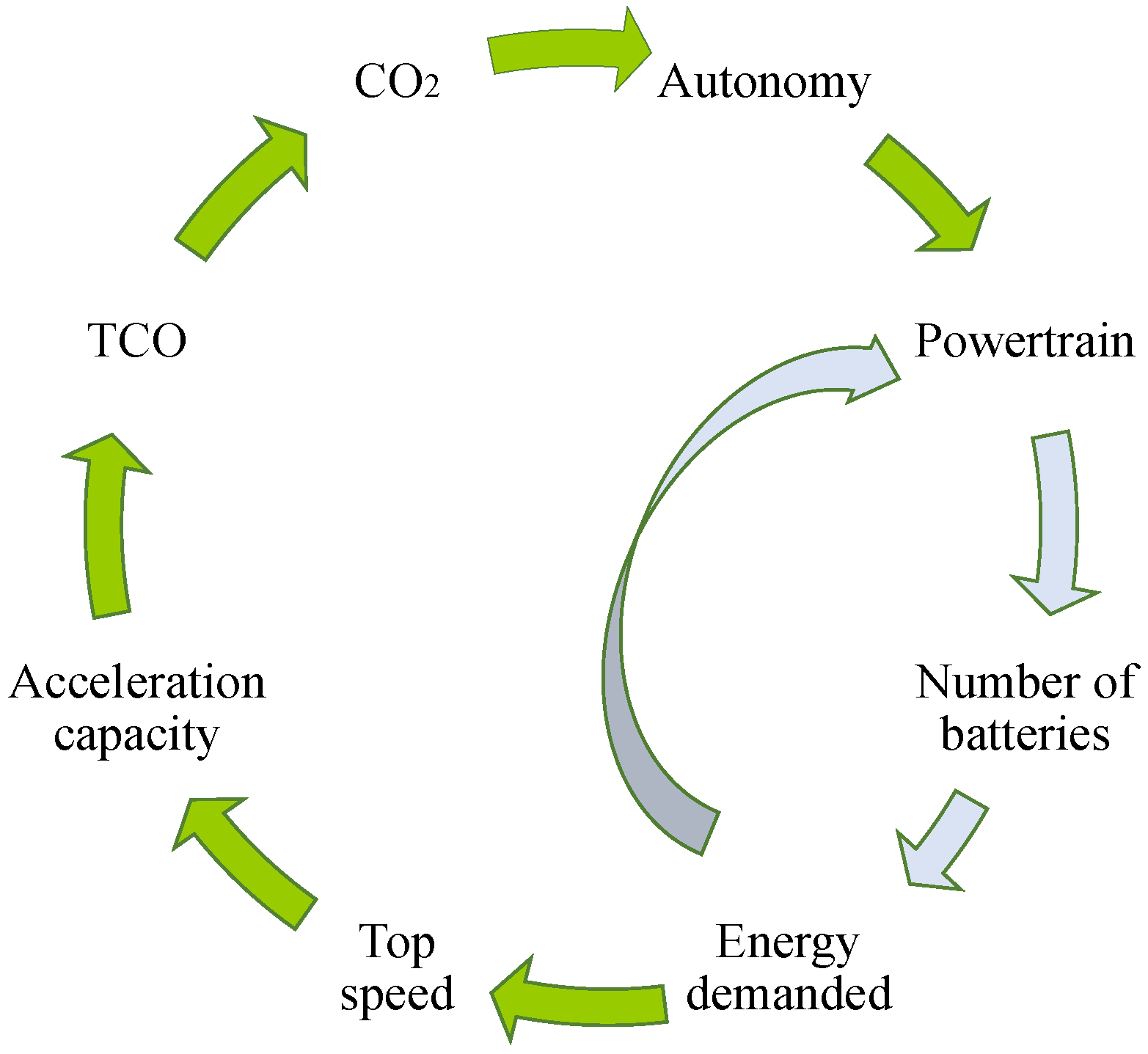
- Phase 3: Use a multi-objective optimization and an iterative energy-based approach to determine the best electric vehicle’s powertrain configuration (number of batteries, motor size, and gearbox transmission ratio) for the given application.
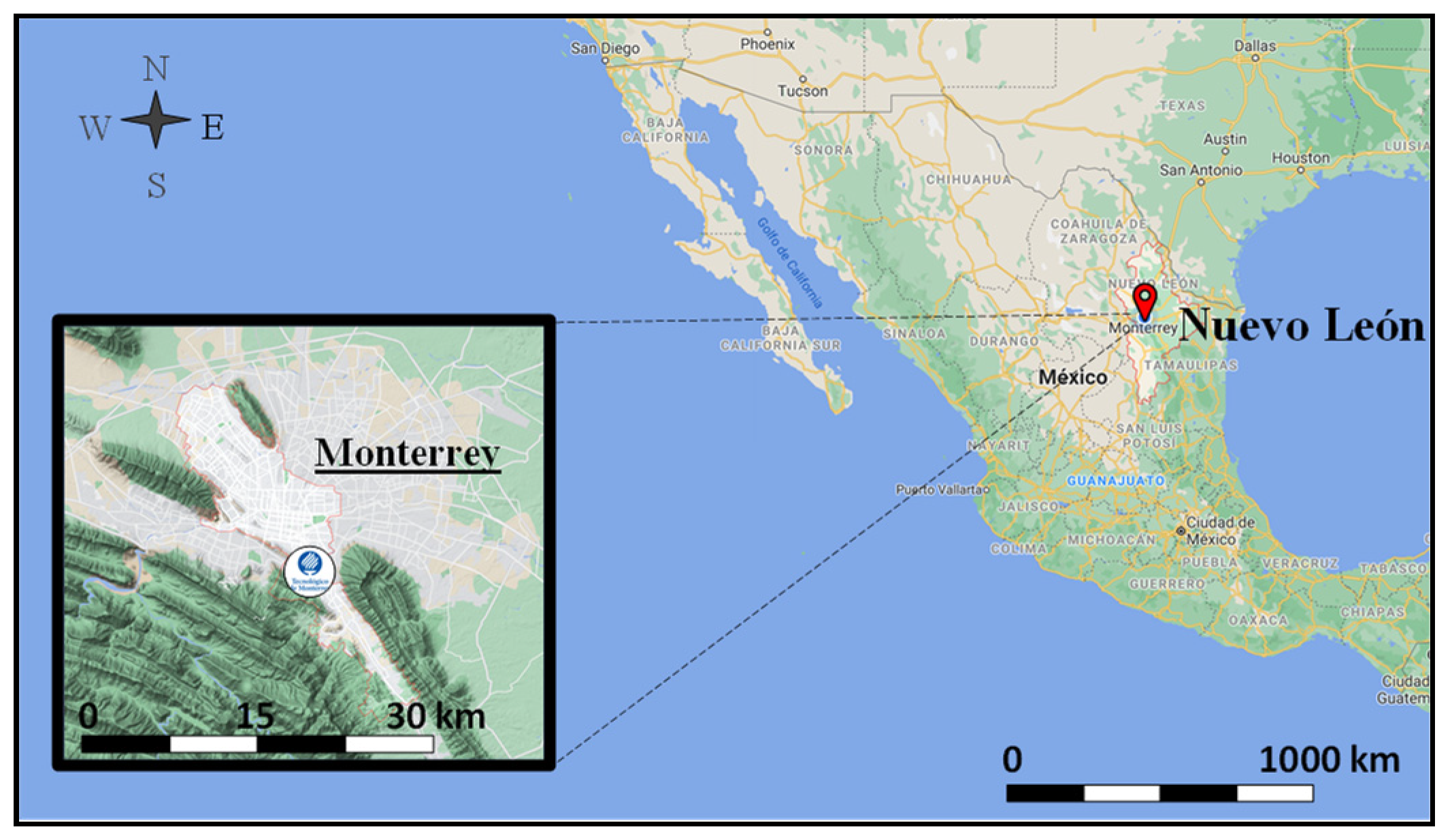
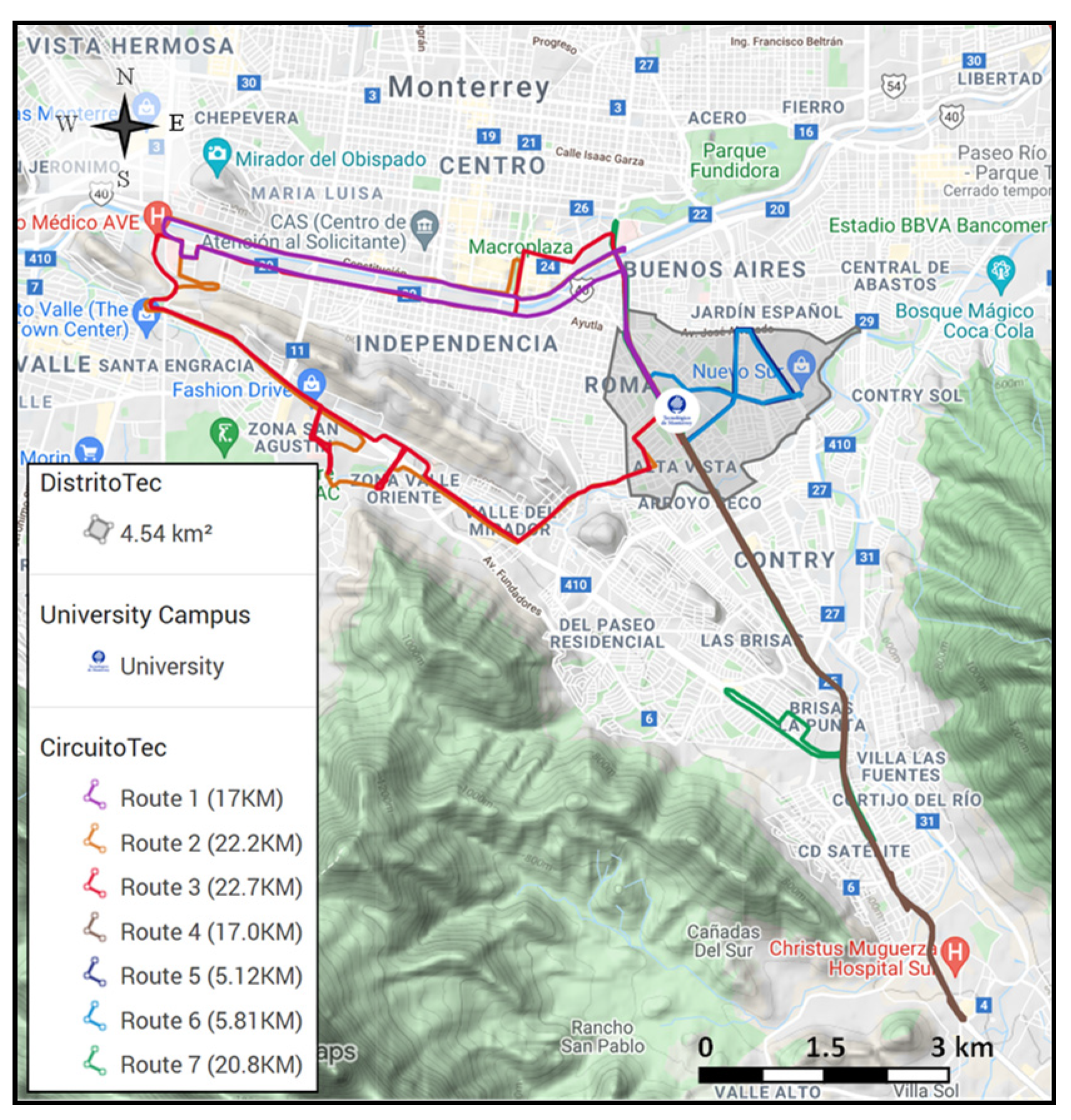
2.1. Phase 1: Current Operation of the Case Study
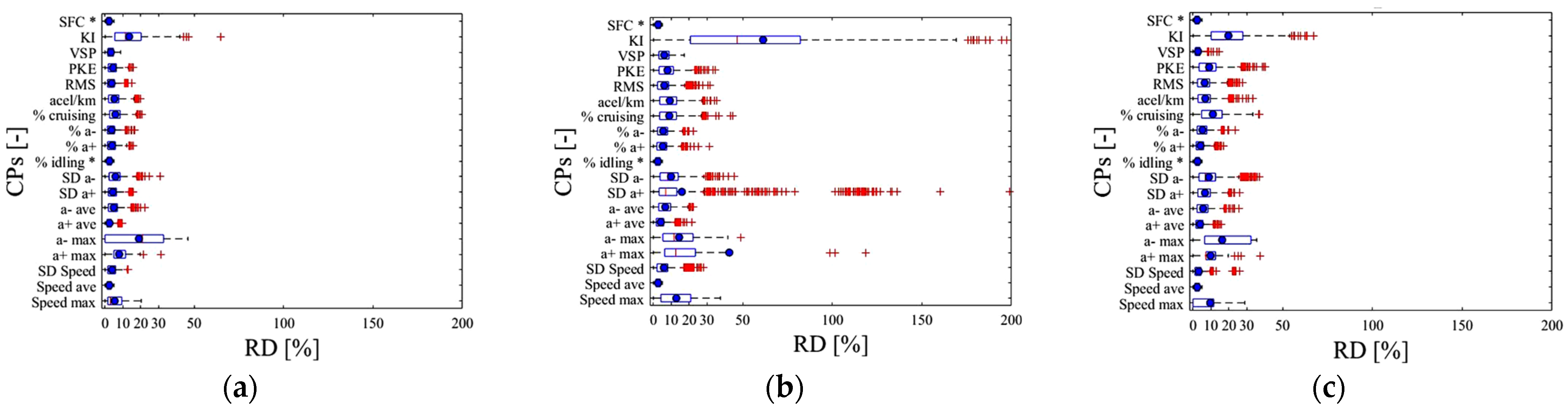
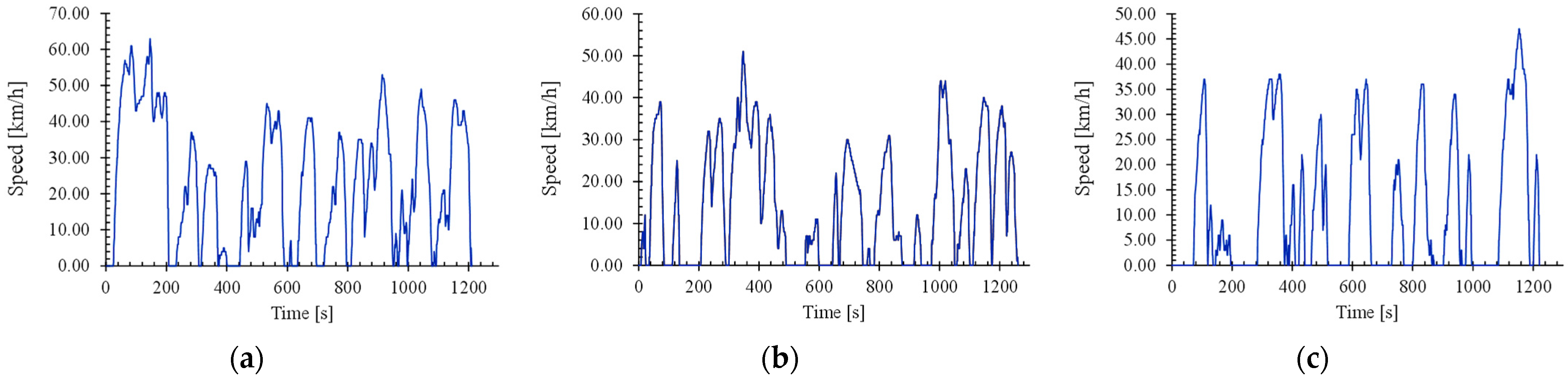
2.2. Phase 2: Driving Cycle
2.3. Phase 3: The Multi-Objective Powertrain Optimization
- Minimizes the power required from the motor while maintaining the current operation with the purpose of reducing the initial cost of the brand-new vehicle.
- Minimizes energy consumption to minimize the operative cost.
- Minimizes the net well-to-wheel CO2 emissions generated per kilometer driven.
- Minimizes the total cost of ownership (TCO).
- Maximizes the acceleration capacity of the vehicle (i.e., less time to reach a given reference speed).
- Maximizes the top speed that the vehicle can reach. As long as the vehicle’s top speed satisfies the driving cycle maximum speed, this characteristic is irrelevant in defining the tailored powertrain for the specific application under consideration. However, high top speed increases the possibility of using the vehicle for eventual other applications. Furthermore, from the marketing point of view, vehicles with high top speed are preferred by drivers. Therefore, in this work, we kept this criterion in the optimization process with low relevance.
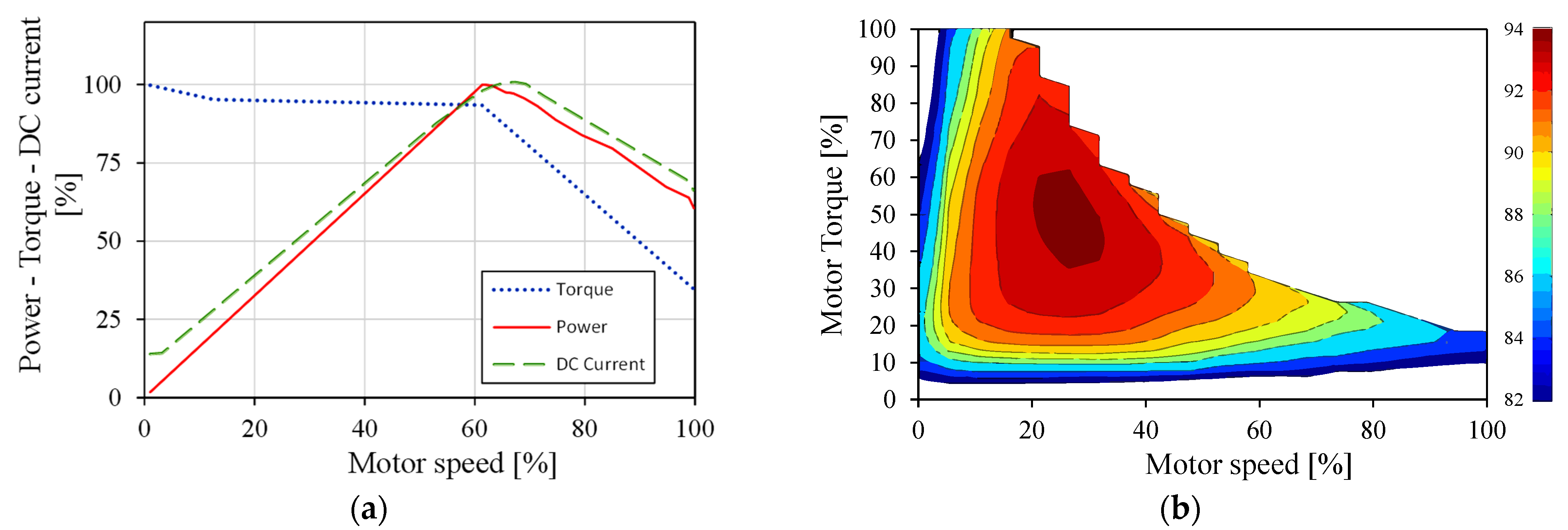
2.3.1. The First Loop of Optimization for Determining the Size of the Motor and Battery Pack
| : mass of the vehicle | : instant velocity of the vehicle |
| : resulting acceleration of the vehicle | : rolling coefficient |
| : drag coefficient | : gravity |
| : frontal area of the vehicle | : road grade |
2.3.2. The Second Loop of Multi-Objective Powertrain Optimization
CO2 Net Emissions
Acceleration Capacity
Total Cost of Ownership—TCO
- Initial investment costs: For electric buses, we considered the cost of the defined motor, transmission, battery pack, chassis with body and accessories, and a charging station; for diesel buses, we considered the cost of the current commercial vehicle.
- Operational costs: This includes the cost of diesel or electricity, corrective and preventive maintenance, insurance, battery-pack replacements, emissions penalties, and driver’s salary.
- Financial costs: This includes loans, financing interest rates, taxes, inflation, depreciation, and savage value after the expected lifespan of the vehicle.
Muti-Objective Optimization Varying the Transmission Ratios
3. Results
3.1. The Current Vehicle Operation
3.2. Driving Cycle
3.3. Multi-Objective Powertrain Optimization
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A




References
- World Health Organization. Ambient (Outdoor) Air Pollution. In Key Facts; World Health Organization: Geneva, Switzerland, 2021; Available online: https://www.who.int/news-room/fact-sheets/detail/ambient-(outdoor)-air-quality-and-health (accessed on 5 December 2021).
- World Health Organization. New WHO Global Air Quality Guidelines aim to save millions of lives from air pollution. In Air Pollution is One of the Biggest Environmental Threats to Human Health, Alongside Climate Change; World Health Organization: Geneva, Switzerland, 2021; Available online: https://www.who.int/news/item/22-09-2021-new-who-global-air-quality-guidelines-aim-to-save-millions-of-lives-from-air-pollution (accessed on 5 December 2021).
- Ramírez-Moreno, M.A.; Keshtkar, S.; Padilla-Reyes, D.A.; Ramos-López, E.; García-Martínez, M.; Hernández-Luna, M.C.; Mogro, A.E.; Mahlknecht, J.; Huertas, J.I.; Peimbert-García, R.E. Sensors for sustainable smart cities: A review. Appl. Sci. 2021, 11, 8198. [Google Scholar] [CrossRef]
- The International Council on Clean Transportation. Update on Electric Vehicle Costs in the United States through 2030. 2019. Available online: https://theicct.org/sites/default/files/publications/EV_cost_2020_2030_20190401.pdf (accessed on 8 December 2021).
- IEA, C.E.M. Global EV Outlook 2020. Available online: https//www.iea.org/reports/global-ev-outlook-2020 (accessed on 8 December 2021).
- International Energy Agency. CO2 Emissions from Fuel Combustion-Overview 2017; International Energy Agency: Washington, DC, USA, 2017. [Google Scholar]
- Franckx, L. Total Cost of Ownership of Electric Cars Compared to Diesel and Gasoline Cars in Belgium; FPB: Brussels, Belgium, 2019. [Google Scholar]
- Catenacci, M.; Fiorese, G.; Verdolini, E.; Bosetti, V. Going electric: Expert survey on the future of battery technologies for electric vehicles. In Innovation under Uncertainty; Edward Elgar Publishing: Cheltenham, UK, 2015. [Google Scholar]
- Conti, M.; Kotter, R.; Putrus, G. Energy efficiency in electric and plug-in hybrid electric vehicles and its impact on total cost of ownership. In Electric Vehicle Business Models; Springer: Berlin, Germany, 2015; pp. 147–165. [Google Scholar]
- Iclodean, C.; Varga, B.; Burnete, N.; Cimerdean, D.; Jurchiş, B. Comparison of different battery types for electric vehicles. IOP Conf. Ser. Mater. Sci. Eng. 2017, 252, 12058. [Google Scholar] [CrossRef] [Green Version]
- Gao, Z.; Lin, Z.; LaClair, T.J.; Liu, C.; Li, J.-M.; Birky, A.K.; Ward, J. Battery capacity and recharging needs for electric buses in city transit service. Energy 2017, 122, 588–600. [Google Scholar] [CrossRef] [Green Version]
- MXylia, M.; Leduc, S.; Patrizio, P.; Kraxner, F.; Silveira, S. Locating charging infrastructure for electric buses in Stockholm. Transp. Res. Part C Emerg. Technol. 2017, 78, 183–200. [Google Scholar]
- Živanović, Z.; Nikolić, Z.; Nikolić, Z.; Živanović, Z. The application of electric drive technologies in city buses. In New Generation of Electric Vehicles; IntechOpen: London, UK, 2016; pp. 27–66. [Google Scholar]
- Tang, X.; Lin, X.; He, F. Robust scheduling strategies of electric buses under stochastic traffic conditions. Transp. Res. Part C Emerg. Technol. 2019, 105, 163–182. [Google Scholar] [CrossRef]
- Puma-Benavides, D.S.; Izquierdo-Reyes, J.; Calderon-Najera, J.D.; Ramirez-Mendoza, R.A. A Systematic Review of Technologies, Control Methods, and Optimization for Extended-Range Electric Vehicles. Appl. Sci. 2021, 11, 7095. [Google Scholar] [CrossRef]
- Hamza, K.; Laberteaux, K.P.; Willard, J.; Chu, K.-C. A Pareto Trade-Off Analysis of Cost Versus Greenhouse Gas Emissions for a Model of a Mid-Sized Vehicle with Various Powertrains. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Quebec City, QC, Canada, 26–29 August 2018; Volume 51753, p. V02AT03A025. [Google Scholar]
- Ribau, J.P.; Silva, C.M.; Sousa, J.M.C. Efficiency, cost and life cycle CO2 optimization of fuel cell hybrid and plug-in hybrid urban buses. Appl. Energy 2014, 129, 320–335. [Google Scholar] [CrossRef]
- Yong, J.Y.; Ramachandaramurthy, V.K.; Tan, K.M.; Mithulananthan, N. A review on the state-of-the-art technologies of electric vehicle, its impacts and prospects. Renew. Sustain. Energy Rev. 2015, 49, 365–385. [Google Scholar] [CrossRef]
- Puma-Benavides, D.S.; Izquierdo-Reyes, J.; Galluzzi, R.; Calderon-Najera, J.D. Influence of the Final Ratio on the Consumption of an Electric Vehicle under Conditions of Standardized Driving Cycles. Appl. Sci. 2021, 11, 1474. [Google Scholar] [CrossRef]
- Hofstetter, M.; Lechleitner, D.; Hirz, M.; Gintzel, M.; Schmidhofer, A. Multi-objective gearbox design optimization for xEV-axle drives under consideration of package restrictions. Forsch. Im Ing. 2018, 82, 361–370. [Google Scholar] [CrossRef] [Green Version]
- Nicoletti, L.; Ostermann, F.; Heinrich, M.; Stauber, A.; Lin, X.; Lienkamp, M. Topology analysis of electric vehicles, with a focus on the traction battery. Forsch. Im Ing. 2021, 85, 457–467. [Google Scholar] [CrossRef]
- Chong, T.H.; Lee, J.-S. A Design Method of Gear Trains Using a Genetic Algorithm. Int. J. Precis. Eng. Manuf. 2000, 1, 62–70. [Google Scholar]
- Chandrasekaran, M.; Padmanabhan, S.; Raman, V.S. Single speed gearbox optimization using genetic algorithm. J. Eng. Appl. Sci. 2015, 10, 5506–5511. [Google Scholar]
- Deb, K.; Jain, S. Multi-speed gearbox design using multi-objective evolutionary algorithms. J. Mech. Des. 2003, 125, 609–619. [Google Scholar] [CrossRef] [Green Version]
- Schiffer, S.; Kain, A.; Wilde, P.; Haber, J.; Helbing, M.; Baeker, B. Influence of the final drive ratio on the consumption of passenger cars under real driving conditions. In Proceedings of the 2017 Twelfth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 11–13 April 2017; pp. 1–11. [Google Scholar] [CrossRef]
- Brooker, A.; Gonder, J.; Wang, L.; Wood, E.; Lopp, S.; Ramroth, L. FASTSim: A Model to Estimate Vehicle Efficiency, Cost and Performance; SAE Technical Paper; SAE: Warrendale, PA, USA, 2015. [Google Scholar]
- Davis, K.; Hayes, J.G. Analysis of electric vehicle powertrain simulators for fuel consumption calculations. In Proceedings of the 2016 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Ve-hicles & International Transportation Electrification Conference (ESARS-ITEC), Toulouse, France, 2–4 November 2016; pp. 1–6. [Google Scholar]
- Ng, C.W.; Yossapong, L. Comparison of Electric Bus Power Consumption Modelling and Simulation Using Basic Power Model, ADVISOR and FASTSim. In Proceedings of the 2020 2nd International Conference on Smart Power & Internet Energy Systems (SPIES), Bangkok, Thailand, 15–18 September 2020; pp. 414–419. [Google Scholar]
- Verbruggen, F.; Salazar, M.; Pavone, M.; Hofman, T. Joint Design and Control of Electric Vehicle Propulsion Systems. In Proceedings of the 2020 European Control Conference (ECC), St. Petersburg, Russia, 12–15 May 2020; pp. 1725–1731. [Google Scholar] [CrossRef]
- Mahmoud, M.; Garnett, R.; Ferguson, M.; Kanaroglou, P. Electric buses: A review of alternative powertrains. Renew. Sustain. Energy Rev. 2016, 62, 673–684. [Google Scholar] [CrossRef]
- Electric Vehicle Database. Energy Consumption of Full Electric Vehicles. In Fully Charged-Official Data Partner; EV Database: London, UK, 2022; Available online: https://ev-database.org/cheatsheet/energy-consumption-electric-car (accessed on 15 January 2022).
- Weiss, M.; Cloos, K.C.; Helmers, E. Energy efficiency tradeoffs in small to large electric vehicles. Environ. Sci. Eur. 2020, 32, 46. [Google Scholar] [CrossRef] [Green Version]
- Australian Bureau of Statistics. 2071.0.55.001-Census of Population and Housing: Commuting to Work-More Stories from the Census, 2016. 2018. Available online: https://www.abs.gov.au/ausstats/[email protected]/PrimaryMainFeatures/2071.0.55.001?OpenDocument (accessed on 10 January 2022).
- ABC News. A Look Under the Hood of a Nation on Wheels. 2005. Available online: https://abcnews.go.com/images/Politics/973a2Traffic.pdf (accessed on 10 January 2022).
- SME News. New Survey Reveals Large Regional Differences in Workers’ Commuting Experience; AI Global Media Ltd.: Staffordshire, UK, 2019; Available online: https://www.sme-news.co.uk/new-survey-reveals-large-regional-differences-in-workers-commuting-experience/ (accessed on 10 January 2021).
- SCT. Estadística Básica del Autotransporte Federal; SCT: Mexico City, Mexico, 2021. [Google Scholar]
- Tecnologico de Monterrey. Circuito Tec: Rutas y Horarios. Movilidad. 2017. Available online: https://movilidad.mty.itesm.mx/circuitotec/index.php (accessed on 11 January 2022).
- Quirama, L.F.; Giraldo, M.; Huertas, J.I.; Tibaquirá, J.E.; Cordero-Moreno, D. Main characteristic parameters to describe driving patterns and construct driving cycles. Transp. Res. Part D Transp. Environ. 2021, 97, 102959. [Google Scholar] [CrossRef]
- Barlow, T.J.; Latham, S.; McCrae, I.S.; Boulter, P.G. A Reference Book of Driving Cycles for Use in the Measurement of Road Vehicle Emissions; TRL: Berkshire, UK, 2009. [Google Scholar]
- Quirama, L.F.; Giraldo, M.; Huertas, J.I.; Jaller, M. Driving cycles that reproduce driving patterns, energy consumptions and tailpipe emissions. Transp. Res. Part D Transp. Environ. 2020, 82, 102294. [Google Scholar] [CrossRef]
- Johnson, R.; Kuby, P. Applied Example 2.15, The 85th Percentile Speed Limit: Going With 85% of the Flow. In Elementary Statistics, Enhanced Review Edition, 10th ed.; 2007 Cengage Learning, Ed.; LTU: Lincoln, NE, USA, 2007; p. 102. [Google Scholar]
- Louisiana State Police. Rational Speed Limits and the 85th Percentile Speed. 2018. Available online: https://web.archive.org/web/20180923093555/http://www.lsp.org/pdf/troopc85thSpeed.pdf (accessed on 11 January 2022).
- Gillespie, T.D. Fundamentals of Vehicle Dynamics; SAE Technical Paper; SAE: Warrendale, PA, USA, 1992. [Google Scholar]
- Guchen Industry. 20cc 320V Elecric Scroll Compressor. 2020. Available online: https://www.guchen-eac.com/what/high-voltage-electric-compressor/320v-electric-scroll-compressor.html (accessed on 11 January 2022).
- Mogro, A.E.; Huertas, J.I. Assessment of the effect of using air conditioning on the vehicle’s real fuel consumption. Int. J. Interact. Des. Manuf. 2021, 15, 271–285. [Google Scholar] [CrossRef]
- Evtimov, I.; Ivanov, R.; Sapundjiev, M. Energy consumption of auxiliary systems of electric cars. MATEC Web Conf. 2017, 133, 06002. [Google Scholar] [CrossRef]
- TROJAN Battery Company. MOTIVE T-1275 PLUS. In Deep-Cycle Flooded/Wet Lead-Acid Battery; Trojan Battery Company: Santa Fe Springs, CA, USA, 2019; Available online: http://www.trojanbattery.com/pdf/datasheets/T1275Plus_Trojan_Data_Sheets.pdf (accessed on 10 July 2021).
- Samsung SDI. Lithium-ion Rechargeable Cell MODEL Name: INR18650-35E. In Specification Of Product; Samsung SDI: Yongin, Korea, 2015; Available online: https://cdn.shopify.com/s/files/1/0481/9678/0183/files/samsung_35e_data_sheet.pdf?v=1605015771 (accessed on 10 July 2021).
- FCH JU. Urban Buses: Alternative Powertrains for Europe. In A Fact-Based Analysis of the Role of Diesel Hybrid, Hydrogen Fuel Cell, Trolley and Battery Electric Powertrains; McKinsey Company, Ed.; FCH JU—The Fuel Cells and Hydrogen Joint Undertaking: Brussels, Belgium, 2012. [Google Scholar]
- Miles, J.; Potter, S. Developing a viable electric bus service: The Milton Keynes demonstration project. Res. Transp. Econ. 2014, 48, 357–363. [Google Scholar] [CrossRef]
- Fotouhi, A.; Propp, K.; Auger, D.J. Electric vehicle battery model identification and state of charge estimation in real world driving cycles. In Proceedings of the 2015 7th Computer Science and Electronic Engineering Conference (CEEC), Colchester, UK, 24–25 September 2015; pp. 243–248. [Google Scholar]
- Yuksel, T.; Michalek, J.J. Effects of Regional Temperature on Electric Vehicle Efficiency, Range, and Emissions in the United States. Environ. Sci. Technol. 2015, 49, 3974–3980. [Google Scholar] [CrossRef] [PubMed]
- EV WEST. EV Conversion Kits. 2022. Available online: https://www.evwest.com/catalog/index.php?cPath=40 (accessed on 11 January 2022).
- ZVEI Die Elektroindustrie. Voltage Classes for Electric Mobility. 2013. Available online: https://www.zvei.org/fileadmin/user_upload/Presse_und_Medien/Publikationen/2014/april/Voltage_Classes_for_Electric_Mobility/Voltage_Classes_for_Electric_Mobility.pdf (accessed on 18 October 2021).
- Hi Performance Electric Vehicle Systems (HPEVS). Peak and continuous power graphs for AC motors. In HPEVS AC Standard Motors; HPEVS: Ontario, CA, USA, 2021; Available online: https://www.hpevs.com/hpevs-ac-electric-motors-power-graphs-ac-35.htm# (accessed on 9 July 2021).
- Battery Electric Vehicles (BEVs)–Not IF but WHEN? 2021. Available online: https://x-engineer.org/automotive-engineering/vehicle/electric-vehicles/battery-electric-vehicles-bev-automotive-industry/ (accessed on 9 July 2021).
- Prohaska, R.; Duran, A.; Ragatz, A.; Kelly, K. Statistical Characterization of Medium-Duty Electric Vehicle Drive Cycles; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2015.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle | Mercedes-Benz Sprinter |
|---|---|
| Drivetrain | Rear Wheel Drive |
| Engine type and fuel | 4 cylinders inline, Intercooled Turbo Diesel EURO V |
| Gross vehicle weight (kg) | 4100 |
| Engine displacement (cm³) | 2143 |
| Engine rated power (kW)/(HP) | 120 (163) @ 3800 RPM |
| Rated torque (Nm) | 380 @ 2000 RPM |
| Transmission gearbox | ECO Gear 360 6-speed manual transmission |
| Acc. Capacity | Spec. Energy Consumption | CO2 Emissions | Motor Power Needed | TCO | |
|---|---|---|---|---|---|
| [s] | [kWh/km] | [gCO2/km] | [kW] | [USD/km] | |
| Weight | 20% | 30% | 10% | 10% | 30% |
| Deep Cycle Lead Acid 1 | Li-Ion 1 | Na-NiCl2 2 | Ni-MH 2 | Lithium-Sulfur 2 | |
|---|---|---|---|---|---|
| Nominal Voltage [V] | 12.00 | 3.6 | 289 | 288 | 305 |
| Capacity [Ah] | 166.00 | 3.50 | 84 | 85 | 80 |
| Weight [kg] | 39.00 | 0.045 | 457 | 534 | 173 |
| Volume [L] | 16.20 | 0.02 | - | - | - |
| Battery Energy [Wh] | 1992 | 13 | 24,276 | 24,480 | 24,400 |
| Specific Energy [Wh/kg] | 183.88 | 1008 | 191.23 | 165.03 | 507.75 |
| Price per unit [USD] | 499.00 | 2.45 | 14,403 | 11,619 | 7238 |
| Price per kWh [USD/kWh] | 250.50 | 194.44 | 593.33 | 474.66 | 296.66 |
| Assumptions Included in the TCO Calculation |
|---|
| Because the electric bus is intended to run under the same operating conditions (driving cycle) of the current diesel buses, the distance driven by the vehicle per year and driver’s salary will remain equal to the diesel counterpart. |
| A ten-year lifetime expectancy was considered for both the diesel and electric bus. |
| Penalties for vehicles that produce on-road emissions were not considered. |
| No government incentives for purchasing an electric vehicle were considered. |
| Insurance of the diesel bus is considered to be 25% lower than the electric counterpart. |
| One charging station investment is considered, and its annual maintenance cost. |
| The battery pack is replaced depending on the lifespan of the battery. One thousand cycles were considered for the lifespan of the batteries. When replaced, a 20% expected increase in prices with a 4% price inflation rate per year was included. A salvage value of 80% for the used batteries is considered with this strategy. |
| The vehicle (diesel and electric) is depreciated by 20% of its current value every year, resulting in a 13% salvage value after 10 years of lifespan. |
| 80% of the initial investment cost is financed through a 5-year loan. |
| The tax rate of 30%, cost of debt of 3.27%, risk-free rate of 4.5%, and Equity Risk Premium (ERP) of 5% are considered. |
| The Net Present Value (NPV) was estimated with a discount rate of 9.22% based on a weighted average cost of capital (WACC) approach. |
| Parameter (Abbreviation) | SFC Scenario | Unit | ||
|---|---|---|---|---|
| Low | Typical | High | ||
| Average Specific fuel consumption (SFC) 1 | 18.75 | 22.74 | 30.00 | L/100 km |
| Average Kinetic Intensity (KI) | 2.06 | 5.15 | 13.69 | m−1 |
| Average Vehicle Specific Power (VSP) | 1.18 | 0.68 | 0.51 | kW/ton |
| Number of accelerations per km (accel/km) | 15.87 | 21.87 | 22.74 | 1/km |
| Cruising percentage (% cruising) | 26.76 | 23.57 | 16.22 | % |
| Accelerating percentage (% a+) | 24.06 | 25.80 | 16.94 | % |
| Decelerating percentage (% a−) | 31.77 | 21.23 | 23.23 | % |
| Idle percentage (% idling) 1 | 17.40 | 28.50 | 44.51 | % |
| Average acceleration (a+ ave) | 0.43 | 0.42 | 0.43 | m/s2 |
| Average deceleration (a− ave) | 0.59 | 0.58 | 0.59 | m/s2 |
| Maximum acceleration (a+ max) | 1.41 | 1.48 | 1.30 | m/s2 |
| Maximum deceleration (a− max) | 3.89 | 2.62 | 2.15 | m/s2 |
| Average speed (Speed ave) 1 | 23.72 | 14.76 | 11.16 | km/h |
| Maximum speed (Speed max) | 64.01 | 47.99 | 51.98 | km/h |
| Characteristic | Gears 1 | |||
|---|---|---|---|---|
| 1 * | 2 | 3 | 4 | |
| NTD for low SFC scenario | 18.93 | 10.03 | 5.32 | 2.82 |
| NTD for typical SFC scenario | 18.93 | 8.71 | 4.01 | 1.84 |
| NTD for high SFC scenario | 18.93 | 13.25 | 9.28 | 6.49 |
| Diesel | Deep-Cycle Lead Acid | Li-Ion | Na-NiCl2 | Ni-MH | Lithium-Sulfur | |
|---|---|---|---|---|---|---|
| Powertrain specifications | ||||||
| Motor power req. [kW] | 89 | 79 | 65 | 78 | 81 | 69 |
| Motor torque req. [Nm] | 370 | 335 | 236 | 331 | 342 | 290 |
| Acceleration capacity (time to 70 km/h) [s] | 23.43 | 15.55 | 15.60 | 15.56 | 15.55 | 15.59 |
| Max. speed 1 [km/h] | 112 | 156 | 142 | 156 | 158 | 145 |
| Energy consumption 2 [Wh/km] | 2147.7 | 653.2 | 539.7 | 645.2 | 665.2 | 571.9 |
| Vehicle Curb weight [kg] | 2575 | 3242 | 2354 | 3181 | 3335 | 2613 |
| Batteries | ||||||
| Number of batteries in a rack | - | 25 | 83 | - | - | - |
| Number of battery racks | - | 1 | 26 | 2 | 2 | 2 |
| Autonomy | ||||||
| Dist. Until 0% SoC [km] | 327 | 117 | 77 | 120 | 118 | 128 |
| Dist. until 20% SoC [km] | 261 | 94 | 61 | 96 | 94 | 102 |
| CO2 net emissions | ||||||
| Well to Tank 3 [gCO2/km] | 139 | 574 | 474 | 567 | 585 | 502 |
| Tank to Wheel [gCO2/km] | 553 | 0 | 0 | 0 | 0 | 0 |
| Well to Wheel [gCO2/km] | 692 | 574 | 474 | 567 | 585 | 502 |
| Costs | ||||||
| Vehicle cost [USD] | $48,790 | $40,860 | $33,037 | $57,148 | $51,691 | $42,407 |
| Battery pack cost [USD] | - | $12,475 | $5287 | $28,807 | $23,239 | $14,477 |
| TCO [USD/km] | $0.38 | $0.29 | $0.27 | $0.34 | $0.32 | $0.29 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huertas, J.I.; Mogro, A.E.; Jiménez, J.P. Configuration of Electric Vehicles for Specific Applications from a Holistic Perspective. World Electr. Veh. J. 2022, 13, 29. https://0-doi-org.brum.beds.ac.uk/10.3390/wevj13020029
Huertas JI, Mogro AE, Jiménez JP. Configuration of Electric Vehicles for Specific Applications from a Holistic Perspective. World Electric Vehicle Journal. 2022; 13(2):29. https://0-doi-org.brum.beds.ac.uk/10.3390/wevj13020029
Chicago/Turabian StyleHuertas, José I., Antonio E. Mogro, and Juan P. Jiménez. 2022. "Configuration of Electric Vehicles for Specific Applications from a Holistic Perspective" World Electric Vehicle Journal 13, no. 2: 29. https://0-doi-org.brum.beds.ac.uk/10.3390/wevj13020029