Truck Scheduling at Cross-Docking Terminals: A Follow-Up State-Of-The-Art Review
by
 , , and
, , and
Oluwatosin Theophilus
, 
Maxim A. Dulebenets
* ,
,
Junayed Pasha
,
Olumide F. Abioye
and
Masoud Kavoosi
Department of Civil & Environmental Engineering, Florida A&M University-Florida State University, Tallahassee, FL 32310-6046, USA
*
Author to whom correspondence should be addressed.
Sustainability 2019, 11(19), 5245; https://0-doi-org.brum.beds.ac.uk/10.3390/su11195245
Submission received: 1 September 2019
/
Revised: 18 September 2019
/
Accepted: 24 September 2019
/
Published: 25 September 2019
(This article belongs to the Section Sustainable Transportation)
Abstract
:Recent trends in the management of supply chains have witnessed an increasing implementation of the cross-docking strategy. The cross-docking strategy, being the one that can potentially improve supply chain operations, has received a lot of attention from researchers in recent years, especially over the last decade. Cross-docking involves the reception of inbound products, deconsolidation, sorting, consolidation, and shipping of the consolidated products to the end customers. The number of research efforts, aiming to study and improve the cross-docking operations, increases every year. While some studies discuss cross-docking as an integral part of a supply chain, other studies focus on the ways of making cross-docking terminals more efficient and propose different operations research techniques for various decision problems at cross-docking terminals. In order to identify the recent cross-docking trends, this study performs a state-of-the-art review with a particular focus on the truck scheduling problem at cross-docking terminals. A comprehensive evaluation of the reviewed studies is conducted, focusing on the major attributes of the cross-docking operations. These attributes include terminal shape considered, doors considered, door service mode considered, preemption, internal transportation mode used, temporary storage capacity, resource capacity, objectives considered, and solution methods adopted. Based on findings from the review of studies, some common issues are outlined and future research directions are proposed.
1. Introduction
The last few decades have witnessed tremendous growth in trade volumes globally. The role of freight terminals and distribution facilities is vital to effectively serve the trade volumes and distribute the products within supply chains [1,2,3,4,5,6,7]. Some of the issues, which are caused by the growing demand for freight transportation, include congestion, delay, and various uncertainties that are associated with the product handling time at freight terminals and distribution facilities. These issues impact the supply chain operations both upstream and downstream. In order to serve the existing demand, proper management of supply chain operations is critical. The need for effective operations is the goal of many supply chain stakeholders in order to survive in a competitive environment. Nowadays, supply chain stakeholders put more emphasis on customer satisfaction and timely product deliveries [8,9,10,11,12]. According to Dong et al. [10], many companies started investing substantial monetary resources into sustainability projects, aiming to reduce emissions during the manufacturing process, meet customer expectations, as well as improve social and environmental sustainability of supply chain operations.
There has been an increasing adoption of the cross-docking strategy by various companies due to the need for improved supply chain operations. Cross-docking is typically described as a logistic procedure, where the products are transferred by the inbound trucks (ITs) from a supplier or a manufacturing plant to a cross-docking terminal (CDT) (see Figure 1). Then, the products are deconsolidated, sorted based on the customer’s preferences within a CDT, consolidated, and shipped out to the end customers using the outbound trucks (OTs). According to Figure 1, a typical cross-docking terminal has a set of receiving doors, where ITs are docked for service, a set of shipping doors, where OTs are docked for service, and a sorting/storage area (temperature-controlled storage areas are generally used for perishable products). The cross-docking strategy was first introduced to the supply chain of Walmart, aiming to improve the efficiency of the product distribution [13]. As noted by Stalk et al. [13], Walmart became the most profitable retailer in the world after introducing the cross-docking strategy. The cost of sales was reduced by 2%–3% after implementing the cross-docking strategy on 85% of their products. Cross-docking has gained a lot of attention from researchers over the years due to the results in practice (Figure 1).
Some researchers discussed the major CDT operations and highlighted a critical role of CDTs in the overall supply chain operations. For example, Sheikholeslam and Emamian [14] described a CDT as a distribution center that is entirely dedicated to the transshipment and distribution of truck and container loads. Vogt [15] conducted a study on the roles of a CDT in the overall supply chain operations and concluded that the cross-docking strategy can be viewed as an integral part of a supply chain. Furthermore, the success of the strategy is highly dependent on its suitability to a given supply chain, and how it is integrated with other supply chain operations. Van Belle et al. [16] discussed the major warehousing operations and how the cross-docking strategy could improve them. The key operations included the reception of inbound products, storage, order picking, and shipping out. It was concluded that storage and order picking have the highest cost components of these four warehousing operations, and the cross-docking strategy can reduce or eliminate these cost components.
Saddle Creek Corp. [17] published a technical report in 2011, which focused on the trends in adoption of the cross-docking strategy by various companies. According to the report, 68.5% had been already using the strategy as part of their supply chain, 15.1% had plans to implement the strategy soon, 15.5% had no plans to use it, while 0.9% of the companies were undecided. Another reason to consider the cross-docking strategy in the distribution of products within a supply chain is its potential to reduce the average transit time of products. According to Jayant [18], while a typical box of cereal may take 104 days to be delivered from the point of production to the supermarket, its real travel time on average is less than 5 days. The cross-docking strategy is generally suitable for supply chains with food/perishable products.
A number of studies conducted detailed reviews of the literature and the industry practices related to the cross-docking operations [14,16,19,20,21]. For example, Agustina et al. [19] performed a detailed review of the mathematical models, which were presented in the literature for CDT planning. The reviewed models were classified into three groups, including the following: (a) strategic—the models that focused on the CDT network design; (b) tactical—the models that focused on the CDT layout design; and (c) operational—the models that focused on the CDT door assignment, scheduling, transshipment, as well as vehicle routing. The study highlighted a lack of mathematical models that could be used for effective distribution planning. Shuib and Fatthi [20] studied the quantitative approaches, which were previously used for the CDT door assignment problem (i.e., assignment of origins to the CDT receiving doors and assignment of destinations to the CDT shipping doors). The following types of mathematical formulations were discovered: linear programming (LP), integer programming (IP), nonlinear programming (NLP), mixed-integer programming (MIP), multi-objective optimization, and quadratic programming (QP). The study also elaborated on the adopted solution methodologies, which included simulation, exact optimization, heuristics, and metaheuristics. It was found that the common objective of the previous research efforts aimed to minimize the total operational time (i.e., the service completion time of the last truck or makespan). A number of future research extensions were suggested, including the following: (a) modeling assignment of the arriving trucks to the CDT doors; (b) analysis of the CDT internal handling operations; (c) modeling potential CDT congestion issues; (d) internal handling equipment deployment; and others.
Ladier and Alpan [21] performed the latest extensive survey related to the cross-docking operations in 2016. The study discussed several aspects of cross-docking, ranging from the strategic perspectives to the tactical and operational perspectives. The operational-level truck scheduling problem was considered as well. In the truck scheduling problem, the CDT operator has to assign the arriving ITs and OTs for service at the available doors as well as determine the order of truck service at each door. Considering the importance of efficient truck scheduling at CDTs and growing attention of the community to the CDT truck scheduling problem, the present study aims to complement the findings from the survey by Ladier and Alpan [21] and perform a recent state-of-the-art review with a particular focus on the truck scheduling problem. The rest of the manuscript is outlined as follows: the next section elaborates on how the survey of the literature was conducted as well as describes the reviewed studies; the third section provides a comprehensive evaluation of the reviewed studies with a focus on the major attributes of the cross-docking operations; the fourth section summarizes the key findings and the existing research needs, while the last section presents the study conclusions as well as the future research directions.
2. Literature Search and Description of the Reviewed Studies
An extensive literature search was performed through the major databases that contain scientific journals. The considered databases are maintained by various publishers, including Elsevier, Springer, Wiley, Sage, Inderscience, IEEE, and others. The scope of this survey primarily focused on a review of the studies, published in scientific journals. The studies, published in conference proceedings, scientific manuscripts (i.e., Masters theses and Ph.D. dissertations), and technical reports, were not considered. The following keywords were used throughout the literature search: cross-docking terminals, truck scheduling at cross-docking terminals, cross-docking and supply chains, and algorithms for efficient cross-docking. The primary objective of the undertaken survey was to identify the studies on truck scheduling at CDTs, which were not considered by Ladier and Alpan [21], as well as the studies, which were published after 2016. A total of 35 relevant studies had been identified by the conducted survey. The collected studies were categorized into four major areas, including the following: (1) general CDT truck scheduling; (2) multi-objective CDT truck scheduling; (3) uncertainty modeling in CDT truck scheduling; and (4) miscellaneous. A detailed description of the reviewed studies by research area is presented in the following sections of the manuscript.
2.1. General CDT Truck Scheduling
This section refers to the studies that discuss the conventional sequence of truck service operations at a typical CDT. Mohtashami [22] conducted a study on truck scheduling at a CDT with temporary storage. The objective of the study was to find the best sequence of ITs and OTs that minimize the makespan. The author proposed an evolutionary algorithm (EA)-based solution algorithm to address the problem. Two scenarios were considered, where the first one allowed preemption, while the second one did not allow preemption. Preemption is an operational technique, which allows a given IT or OT unloading or loading some of its products, leaving the dock for other trucks, and returning later to complete its service. The proposed solution algorithm was applied for 18 problem instances throughout the computational experiments. It was found that the presented algorithm outperformed the one which was developed earlier by Yu and Egbelu [23] in terms of the obtained makespan values. Furthermore, findings from the study showed that efficiency of the CDT operations might be improved when preemption is allowed.
Arkat et al. [24] studied the truck scheduling problem at a CDT with multiple dock doors. It was assumed that release times were imposed to the ITs docked at the CDT doors. As for the OTs, no time constraints were imposed on their precedence. The objective of the proposed model was to find the best docking assignment and truck service sequence that minimize the makespan. The mathematical model was solved using CPLEX and the simulated annealing (SA) solution algorithm. The conducted numerical experiments showed that CPLEX could solve the small-size problem instances but was not efficient for the large-size problem instances. However, the SA solution algorithm was effective for both small- and large-size problem instances. It yielded good-quality solutions within a comparatively shorter computational time.
Assadi and Bagheri [25] used the just-in-time (JIT) approach to address the truck scheduling problem at a CDT. The authors specifically considered the ready times for ITs and OTs, different transshipment times between receiving and shipping doors, and the interchangeability of products. The objective of the mathematical model in the study was to decide on the door assignment and the truck service sequence that minimize the total early and late departures of the OTs. The differential evolution (DE) and population-based SA metaheuristic algorithms were proposed to solve the problem. The developed metaheuristic algorithms were evaluated against CPLEX for the small-size problem instances. Moreover, for the medium- and large-size problem instances, the developed algorithms were evaluated against a purely random search. Findings showed that, although the DE solution algorithm was superior to the SA solution algorithm in terms of the solution quality, both algorithms had promising results.
Cota et al. [26] considered the truck scheduling problem at a CDT with multiple doors. Based on the basic operational constraints of a CDT, the problem was formulated as a two-stage hybrid flow-shop problem. The time-indexed mixed-integer linear programming formulation was proposed. The objective was to minimize the makespan. The CDH, which is a polynomial-time heuristic, was developed to solve the proposed mathematical model. The developed solution algorithm was evaluated against the Johnson’s rule-based ready time heuristic (JRH) and the Johnson’s rule-based largest processing time heuristic (JLPTH), proposed earlier by Chen and Song [27]. The numerical experiments showed that the CDH heuristic consistently yielded better performance for the large-size problem instances. However, the JLPTH heuristic performed better than CDH for the small-size problem instances (e.g., when considering two machines). Furthermore, it was noticed that the average gaps for all the analyzed heuristics were steady for the problem instances with more than 60 jobs.
Golshahi-Roudbaneh et al. [28] conducted a study on the truck scheduling problem at a CDT. The objective of the study was to determine the optimal truck sequence for both ITs and OTs, minimizing the makespan. The authors used the mathematical model, which was previously formulated by Yu and Egbelu [23]. The following five metaheuristic algorithms were used to solve the problem: (1) SA; (2) EA; (3) Keshtel algorithm (KA); (4) stochastic fractal search (SFS); and (5) hybrid SA-particle swarm optimization (PSO). The algorithmic performance was evaluated for the mathematical model using a relative percentage deviation (RPD) as a performance measure for comparison. Findings from the study showed that KA and SFS had the best performance in terms of the RPD values; however, SA and SA-PSO had the minimum computational time. The authors pointed out that the developed algorithms could assist the CDT operators with the development of effective truck schedules.
Khalili-Damghani et al. [29] proposed a new multi-period CDT model for truck scheduling with due dates, multiple product types, variable truck capacities, and temporary storage. The objective of the mathematical model was to minimize the makespan. The problem was solved using an EA-based solution algorithm that was developed. A total of 90 problem instances were used for the numerical experiments, which were classified into the small-, medium-, and large-size problem instances. The proposed algorithm was evaluated against the exact branch-and-bound method. The findings showed that, for the small-size and medium-size problem instances, the proposed algorithm achieved optimal/near-optimal solutions. However, for the large-size problem instances, the branch-and-bound method could not attain convergence within the pre-defined computational time limit, whereas the proposed EA-based solution algorithm produced good-quality solutions and required a reasonable computational time.
Luo and Ting [30] studied the truck scheduling problem at a multi-door CDT. The problem simultaneously involved the door assignment and service sequencing of ITs and OTs. The objective of the study was to minimize the total holding cost, associated with the total time the products spent at the CDT. An ant colony optimization (ACO)-based solution algorithm was proposed to solve the problem. The numerical experiments were conducted to evaluate the proposed solution algorithm against GUROBI. The authors generated a total of 24 problem instances. A computational time limit of 7200 sec was set for GUROBI. Both solution algorithms achieved optimal solutions for 15 problem instances. GUROBI could not provide the optimal solutions for the remaining nine problem instances, whereas the proposed ACO-based solution algorithm provided solutions within a reasonable computational time. The findings also showed that a reduction in the inventory holding cost increased the makespan. Therefore, a multi-objective model that considers both makespan and inventory holding cost was suggested as an extension of the study.
Wisittipanich and Hengmeechai [31] addressed the truck scheduling problem at a multi-door CDT. The objective of the study was to minimize the makespan. The authors formulated a mixed-integer programming (MIP) model for the door assignment and truck sequencing at the CDT doors. A modified PSO-based solution algorithm was used to solve the developed mathematical model. The algorithm was referred to as GLNPSO algorithm—the particle swarm optimization with combined g-best, l-best, and n-best social structures. A total of 35 problem instances were generated and used to conduct the computational experiments. Performance of the proposed modified PSO-based solution algorithm was evaluated against the traditional PSO algorithm and exact optimization (LINGO). The findings showed that the metaheuristic algorithms (PSO and GLNPSO) yielded similar results for the small- and medium-size problem instances. However, GLNPSO demonstrated superior performance as compared to the traditional PSO in terms of the solution quality and the convergence speed for the large-size problem instances.
Serrano et al. [32] considered the real-world cross-docking operations of the Renault Company. The authors proposed an MIP model for scheduling the IT arrivals (given the soft time window constraints), shop-floor repackaging operations, and scheduling the OT departures. The objective of the proposed model was to minimize the total penalty costs, associated with the IT arrivals outside the scheduled time windows and the resulting unbalanced repackaging workload. The proposed MIP model was solved using CPLEX. The real-world data, provided by Renault, were used for the computational experiments. The number of variables varied between 18,920 and 82,038. On the other hand, the number of constraints varied between 31,508 and 99,778. The study showed that the computational time, which was required by CPLEX, increased with the problem size.
Behnamian et al. [33] studied the decision problem, where the products were transferred from suppliers to customers through CDTs. The truck service breakdowns were considered in the study. The objective was to minimize the total transportation cost and the sum of makespans at the considered CDTs. The authors developed a two-stage MIP model for the CDT truck scheduling and the location of each CDT in the network. Four solution algorithms were proposed to solve the problem: (1) EA; (2) SA; (3) DE; and (4) hybrid EA-SA. The four proposed algorithms were evaluated using the small- and large-size instances. RPD was used as a performance measure to compare the algorithms. The findings showed that the produced solutions were similar for the small-size problem instances. However, the hybrid EA-SA performed best among the four proposed algorithms in terms of the RPD values for the large-size problem instances.
Dulebenets [34] proposed an MIP model for the CDT truck scheduling problem, aiming to minimize the total truck service cost, including the total handling cost, the total waiting cost, and the total delayed departure cost. A Diploid EA (DEA) was proposed as a solution approach and was based on the observed drawbacks of the previous solution algorithms that used the haploidy concept. Unlike the haploidy concept, the diploidy concept assumes that a copy of each chromosome would be stored before the crossover operation. The numerical experiments were conducted to evaluate the performance of the proposed algorithm. The optimality gap was used as a measure of performance. The findings showed that the optimality gap did not exceed 0.18%. The total truck service cost was reduced on average by 18.17% after application of the diploidy concept.
Dulebenets [35] studied EAs for CDT truck scheduling problems. The focus of the study was the use of strong and weak mutation mechanisms within the algorithm. An MIP model was formulated for the truck scheduling problem, and the objective of the model was to minimize the total weighted truck service cost. The model was solved using two variations of EA: the first variation applied the strong mutation, where the number of genes to be changed was fixed; while the second one applied the weak mutation, where the number of genes to be changed might vary. The author conducted the numerical experiments, and the findings showed that the EA with weak mutation performed better than the EA with strong mutation in terms of the solution quality. The results showed an average weighted truck service cost reduction of 10.8%, when the EA with weak mutation was deployed. However, the computational times of the considered EA algorithms had no significant difference. Also, the heuristic, proposed for initialization of the chromosomes and population, outperformed the previous methods, which have been used in the literature.
Ladier and Alpan [36] focused on the truck scheduling problem at a CDT. The authors modeled the internal pallet handling within the considered CDT. The objective of the study was to minimize the total number of stored pallets and dissatisfaction of the transportation providers. The problem had non-deterministic polynomial-time hard (NP-hard) computational complexity. Three heuristic solution algorithms were proposed to solve the problem, two of which solved a set of integer programming (IP) models sequentially, while the third relied on a tabu search (TS). Based on the performed computational experiments, it was found that all the developed solution algorithms were effective and could solve the large-size problem instances within an acceptable computational time.
Wang et al. [37] studied the truck scheduling problem at a CDT with multiple shipping and receiving doors. The objective of the study was to find the best door assignment and truck sequence that minimizes the makespan. An MIP model was formulated for the problem. Three solution algorithms were proposed to address the problem: (1) harmony search (HS); (2) improved harmony search (IHS); and (3) EA. The parameter values for the developed solution algorithms were set using the Taguchi scheme, aiming to improve their computational performance. The findings showed that the IHS algorithm had the best performance among the three algorithms in terms of quality of the obtained truck schedules. On the other hand, the EA algorithm had the worst performance, when the computational time limit was imposed.
Dulebenets [38] studied the scheduling of trucks at a CDT. The author proposed a delayed start parallel EA for scheduling ITs and OTs. The algorithm executed separate EAs in a sequential manner on its islands and used an adaptive migration criterion to exchange the best solutions among the active islands. The objective of the proposed mathematical model was to minimize the total truck service cost, which included: (1) the total handling cost; (2) the total waiting cost; (3) the total scheduled departure time violation cost; and (4) the total CDT storage space utilization cost. The proposed EA-based algorithm was evaluated against CPLEX and five other metaheuristic algorithms, previously used in the literature, including parallel EA (PEA), EA, variable neighborhood search (VNS), TS, and SA. The findings showed that the developed solution algorithm had the optimality gaps of less than 0.24%. Furthermore, the proposed solution algorithm was found to be efficient in terms of both solution quality and computational time.
Fonseca et al. [39] focused on the truck scheduling problem at a parallel-dock CDT. The objective of the study was to minimize the makespan. The model was formulated as a two-machine flow shop scheduling problem, where machines “1” and “2” corresponded to receiving and shipping doors, respectively. Two mathematical formulations of the model were considered, including the following: (a) a two-dock mathematical formulation, proposed by Chen and Lee [40]; and (b) a parallel-dock mathematical formulation, proposed by Cota et al. [26]. A hybrid solution approach, which was based on a Lagrangian relaxation technique, was developed to solve the problem. The proposed solution approach relied on Lagrangian multipliers and constructive heuristics (referred to as H1 and H2) with local search procedures, which were able to generate good-quality feasible solutions. The conducted numerical experiments indicated that H2 was generally superior as compared to H1 in terms of the objective function values. The proposed solution methodology was also found to be more promising as opposed to the previously presented solution methods.
Seyedi et al. [41] addressed the problem of truck scheduling at a CDT. The objective of the presented mathematical model was to minimize the makespan. A total of five new heuristic methods (cross-dock heuristics CDH1 through CDH5) were developed to solve the problem. The heuristics differed from each other based on the strategies, which were used for selecting ITs and OTs. The computational experiments were conducted using 20 problem instances, previously developed by Yu [42]. In addition, 15 medium- and large-size problem instances, previously used by Golshahi-Roudbaneh et al. [28], were considered as well. The results demonstrated that the proposed heuristics were able to find good-quality solutions within a reasonable computational time. The CDH3, CDH4, and CDH5 heuristics typically yielded the best objective function values for the small-, medium-, and large-size problem instances, which were considered throughout the computational experiments.
Vahdani and Shahramfard [43] investigated the truck scheduling problem at a multiple door CDT, which operates doors in a mixed service mode. The objective function was to minimize the total cost, which included the total holding cost, the total late departure cost, and the total waiting cost. Two metaheuristics were used as solution approaches for the proposed model, including EA and imperialist competitive algorithm (ICA). A total of 30 problem instances were generated to perform the numerical experiments. The developed problem instances were classified into the small-, medium-, and large-size problem instances. It was found that CPLEX was able to solve only the small-size problem instances to the global optimality within the computational time limit imposed. The computational experiments showed that ICA generally obtained better solutions as compared to EA for the large-size problem instances but required higher computational time.
Zhang et al. [44] studied the truck-to-door assignment problem at a CDT. The objective function of the proposed mathematical model minimized the total weighted travel distance between the receiving and shipping doors. An ACO-based algorithm was presented to solve the problem. Throughout the numerical experiments, the proposed algorithm was compared against the EA algorithm, the scatter search (SS) algorithm, and CPLEX. The developed ACO algorithm showed a competitive performance as compared to CPLEX for the small-size problem instances. The results also demonstrated that ACO and SS generally required higher computational time than EA for the considered problem instances. However, ACO was able to achieve the best solution quality of the majority of the generated problem instances. The study concluded that the proposed ACO algorithm had the potential of reducing the cost of transferring products between the receiving and shipping doors at CDTs.
2.2. Multi-Objective CDT Truck Scheduling
In this section, the CDT truck scheduling studies, which considered multiple objective functions, are reviewed in detail. Amini and Tavakkoli-Moghaddam [45] proposed a bi-objective mathematical model for the truck scheduling problem at a CDT, where potential truck service breakdowns were explicitly captured. The objectives included the following: (1) minimize the total tardiness of the OTs; and (2) maximize the reliability of the system (by minimizing the total weighted completion time, which was dependent on the defect rate). Three metaheuristic solution algorithms were developed to solve the proposed model: (1) non-dominated sorting genetic algorithm II (NSGA-II); (2) multi-objective simulated annealing (MOSA); and (3) multi-objective differential evolution (MODE). Five performance measures were used in evaluation of the algorithms, which included the quality metric (QM), the spacing metric (SM), the generational distance (GD), the diversity metric (DM), and the maximum pareto front error (MPFE). The authors found that all three metaheuristics yielded a good solution quality. The MODE, however, had the best performance when considering all five performance measures.
Fazel Zarandi et al. [46] studied the truck scheduling problem at a CDT. The authors proposed a new multi-criteria model with non-linear terms and integer variables. The model was mapped to the constraint satisfaction problem (CSP) and the integer programming (IP) model. The study highlighted a potential infeasibility of eliminating earliness and tardiness costs simultaneously. Therefore, the objective of the proposed model was to minimize the total earliness, the total tardiness, and the number of preemptions of the OTs. An EA-based solution algorithm was also proposed to solve the problem. A total of 50 problem instances were generated in order to evaluate the computational performance of the developed solution approaches. It was found that both CSP and IP achieved good-quality solutions for the small-size problem instances, but not for the large-size problem instances. EA, on the other hand, was able to achieve good-quality solutions within a reasonable computational time for all the considered problem instances.
Goodarzi et al. [47] addressed the problem of shipment and delivery at a CDT. The authors proposed a mixed-integer nonlinear model with two objectives: (1) to minimize the total transportation cost; and (2) to minimize the total earliness and tardiness, which are associated with visiting retailers. A multi-objective imperialist competitive algorithm (MOICA) was proposed to solve the problem. The study considered three scenarios, which included a direct shipment (without using a CDT), an indirect shipment (using a CDT), and a combination of the two. The proposed solution algorithm was evaluated against NGSA-II and pareto archived evolution strategy (PAES). The result showed that MOICA was superior in terms of the QM, mean ideal distance (MID), DM, and SM metrics.
Kargari Esfand Abad et al. [48] studied a pick-up and delivery polluting-routing problem, formulated as a bi-objective mathematical model. The first objective of the model minimized the total system cost, while the second objective minimized the total fuel consumption cost. The authors proposed three metaheuristic solution algorithms, including: (1) non-dominated ranking genetic algorithm (NRGA); (2) NSGA-II; and (3) multi-objective particle swarm optimization (MOPSO). The proposed metaheuristics were evaluated using 20 problem instances, which included the small-, medium-, and large-size problem instances. The results clearly showed the advantages of cross-docking over traditional distribution methods in terms of the delivery times and the overall system costs. Furthermore, the considered performance measures (e.g., CPU, MID, and DM) showed a significant difference in at least two of the proposed metaheuristics.
Chargui et al. [49] aimed to optimize operations at a rail-road physical internet (PI)-hub CDT. The PI concept was defined as an open global logistics system, inspired by the digital Internet, where the products were encapsulated in standardized modular containers (that are also referred to as “PI-containers”). In the considered rail-road PI-hub, the products were delivered by trains and then transferred to the designated shipping doors using the PI-conveyors. After that, the products were loaded on the corresponding OTs. The authors presented a multi-objective formulation for the problem, aiming to: (1) minimize the cost of using OTs; and (2) minimize the energy consumption cost of the PI-conveyors. Two multi-objective hybrid metaheuristics were proposed to solve the formulated model, including multi-objective VNS hybridized with SA (MO-VNSSA) and multi-objective VNS hybridized with TS (MO-VNSTS). Throughout the computational experiments, the MO-VNSSA and MO-VNSTS algorithms were compared to the lexicographic goal programming method, which was implemented using CPLEX. It was found that CPLEX could not provide solutions for the large-size problem instances within the computational time limit imposed. On the other hand, both MO-VNSSA and MO-VNSTS demonstrated competitive performance in terms of both solution quality and computational time.
Fard and Vahdani [50] addressed the problem of truck scheduling at a multiple door CDT. The study specifically focused on the efficient assignment of trucks and forklifts to the available CDT doors. The CDT was assumed to have receiving doors, shipping doors, and flexible doors. The receiving and shipping doors could serve the ITs and the OTs, respectively. On the other hand, the flexible doors could serve both types of trucks. The authors presented a bi-objective optimization model for the problem. The first objective was to minimize the total cost, which included the total product holding cost, the total delayed departure cost, and the total waiting cost. The second objective was to minimize the energy consumption by the forklifts at the CDT. A total of four metaheuristic algorithms were applied to solve the proposed bi-objective optimization model, including the following: (1) multi-objective grey wolf optimizer (MOGWO); (2) MOICA; (3) NSGA-II; and (4) multi-objective EA on decomposition (MOEA/D). The proposed metaheuristic algorithms were compared in terms of different performance indicators. The results from the conducted computational experiments demonstrated a high sensitivity of the total system cost to the holding cost of each product unit.
2.3. Uncertainty Modeling in CDT Truck Scheduling
Only a few studies considered uncertainties in the CDT operations throughout truck scheduling. In particular, Ladier and Alpan [51] addressed the truck scheduling problem at a CDT with time windows. The study identified the possibility of uncertainties in truck arrival times, loading times, and unloading times. The objective of the proposed model aimed to minimize the total number of stored pallets and dissatisfaction of the transportation providers. The authors proposed nine optimization methods, which included the minimax method, the minimization of expected regret, three models for the resource redundancy, and four models for the time redundancy. The following robust metrics were used to evaluate the proposed methods: (a) robustness subject to variation in transfer time, (b) robustness subject to variation in unloading time, and (c) robustness subject to variation in arrival time. The conducted numerical experiments showed that the redundancy models had the best schedules in terms of robustness, but were relatively costly from the implementation standpoint.
Rajabi and Shirazi [52] considered uncertainty in arrival times of trucks at a CDT. The objective of the proposed mathematical model was to minimize the total truck waiting time. The uncertainty in truck arrival times was captured in the study using chance-constrained mathematical programming. The authors proposed the VNS algorithm to solve the problem. A number of the small- and large-size problem instances were generated to evaluate the proposed solution algorithm against exact optimization. The numerical experiments were conducted, and the results showed that the optimality gap of VNS did not exceed 12% for the small-size problem instances. The exact optimization approach could not achieve the global optimal solutions for the large-size problem instances. However, VNS was able to obtain solutions for the large-size problem instances within a reasonable computational time.
Mousavi et al. [53] presented a multi-criteria group decision-making (MCGDM) model for the CDT location selection. Various sources of uncertainty were addressed in the study using a set of interval-valued intuitionistic fuzzy (IVIF) numbers. The goal of the presented methodology was to select the appropriate CDT location among the candidate CDT locations using a number of criteria. The following criteria were considered: (1) available capacity; (2) possibility of expansion; (3) industrial laws and regulations; (4) proximity to retailers and customers; (5) proximity to suppliers or providers; and (6) associated transportation and handling costs. The aforementioned criteria were evaluated across the candidate CDT locations. The importance of each evaluation criterion was associated with the IVIF number. The decision-making process involved the aggregation of all IVIF-decision matrices (IVIF-DM) using IVIF-weighted arithmetic averaging (IVIF-WAA) into the final decision matrix. After generating an ideal CDT location point, the distances to the candidate CDT locations were compared to make the final selection. The presented methodology was found to be useful for decision-makers in order to select the appropriate CDT location based on various criteria, considering potential uncertainties.
2.4. Miscellaneous
This section of the manuscript describes the studies, which did not fall under any of the aforementioned three study categories. Sheikholeslam and Emamian [14] conducted an extensive review of the studies on operations at CDTs, including temporary storage allocation, allocation of handling resources, CDT door assignment, truck scheduling, and others. The study noted the need for the optimization models that could simultaneously handle several decisions and assist the CDT operators with proper operations management. The commonly used solution algorithms for various CDT operational problems were also highlighted, including EA, DE, TS, ACO, PSO, VNS, and NSGA-II, among others. Moreover, the study underlined the importance of considering temporary storage operations in future research efforts.
Enderer et al. [54] focused on the truck-to-door assignment problem at a CDT, which was integrated with the vehicle routing problem. The objective of the study was to minimize the total cost, including the total material handling cost and the total transportation cost. The authors presented two MIP models, including the following: (a) a multi-commodity flow-based formulation; and (b) a configuration-based formulation. A column generation algorithm was developed to solve the problem. Moreover, a heuristic algorithm was proposed as an alternative solution approach. The numerical experiments were conducted for the problem instances with up to 20 origins and 50 destinations. Both solution approaches were found to be promising. The proposed heuristic algorithm also demonstrated a competitive performance in terms of the computational time.
Nikolopoulou et al. [55] addressed a pick-up and delivery problem, involving the vehicle routing problem with CDTs. The study evaluated different distribution options between suppliers and customers based on cost-effectiveness, including the following: (a) direct shipping (without using CDTs), and (b) indirect shipping (using CDTs). The objective was to minimize the total transportation cost. A local search metaheuristic algorithm was developed to solve the problem. The proposed solution algorithm relied on the TS features. The conducted computational experiments showed that, for the cases where suppliers and customers had high proximity, the direct shipping option incurred a lower cost. On the other hand, for the cases where suppliers and customers were remotely positioned, the indirect shipping option incurred a lower cost. Furthermore, for the cases with a many-to-many relation between suppliers and customers, the indirect shipping option achieved more cost savings as compared to the direct shipping option. Also, when a CDT was located near central positions within a given transportation network, additional cost savings were observed.
Wang et al. [56] addressed the problem of vehicle routing with CDTs. The authors developed an MIP model for the problem. The objective of the proposed mathematical model was to minimize the total travel cost and the fixed cost of the vehicles. Two heuristic solution algorithms were proposed to solve the problem: (1) construction heuristic with a two-layer simulated annealing (CH-TLSA); and (2) construction heuristic with a two-layer tabu search (CH-TLTS). While the first layer of the heuristics optimized the allocation of trucks, the second one optimized the visiting order of suppliers and retailers. Findings from the conducted numerical experiments showed that CH-TLSA had the best performance for the large-size problem instances. However, CH-TLTS was more efficient for the medium-size problem instances.
Gelareh et al. [57] investigated the truck-to-door assignment problem at a CDT. The objective was to minimize the total transportation cost. The authors presented a total of eleven MIP formulations. The models were solved using CPLEX and comparatively evaluated. The 50 problems instances, proposed by Guignard et al. [58], were used throughout the numerical experiments. The computational time limit for CPLEX was set to 7200 sec. The considered mathematical models were compared based on the number of instances that were solved to the global optimality, upper bounds provided, and the computational time required. It was found that one of the proposed mathematical models was superior to the ones, which were previously presented in the CDT truck scheduling literature. However, the study highlighted the challenge of developing a mathematical model and a solution approach, which would enable solving the large-size problem instances within a reasonable computational time.
Nassief et al. [59] addressed the truck-to-door assignment problem at a CDT, aiming to minimize the total handling cost. Two new mixed-integer mathematical formulations were presented for the problem. The study pointed out that the common mathematical formulations for the CDT truck-to-door assignment problem relied on the path-based formulation, which is based on binary variables. The new mixed-integer mathematical formulations included the following: (1) a flow-based formulation, which relied on continuous variables to compute the amount of flow traversing each door pair; and (2) a configuration-based formulation, which used a compact definition of variables to model configurations between origins and receiving doors and destinations and shipping doors. The formulations were compared based on the quality of their LP relaxation bounds with respect to the Lagrangean relaxation. A column generation solution approach was adopted to solve LP relaxations due to a significant number of variables. Throughout the computational experiments, it was found that the column generation method was able to obtain better bounds as compared to the sub-gradient optimization method. Also, the LP relaxation of the configuration-based formulation was found to be equivalent to the Lagrangean Dual problem.
Schwerdfeger et al. [60] considered the JIT deliveries between a CDT and an original equipment manufacturer (OEM) plant. The objective of the study was to minimize the fleet size of trucks, required for transportation of the products. The authors developed two MIP models for the problem (JIT-VS1 and JIT-VS2). A procedure, referred to as a decomposition procedure (DEC), was used to decompose the developed model into two sub-problems. The two models were solved using GUROBI. The findings showed that, while JIT-VS1 was only suitable for the small-size problem instances, JIT-VS2 could be solved for the large-size problem instances as well. Three experiments were conducted to examine the effects of some factors on the truck fleet size, such as an increase in the distance between the CDT and the factory, the JIT interval size, and the container standardization. The findings showed that the aforementioned factors influenced the truck fleet size. The truck fleet size increased when the distance between the CDT and the factory increased, the JIT principle was applied strictly, and the number of standardized containers increased.
3. Detailed Analysis of the Reviewed Studies
A literature review summary is provided in Table 1, including the following data: (1) author(s) and year; (2) objective; (3) objective component(s)—if applicable; (4) solution method; and (5) notes. The following sections of the manuscript provide more insights regarding the literature review findings and focus on the following aspects: (a) distribution of the reviewed studies by year; (b) CDT shape considered; (c) CDT doors considered; (d) door service mode considered; (e) preemption; (f) internal transportation mode used; (g) CDT temporary storage capacity and resource capacity; (h) objectives considered; and (i) solution methods adopted.
3.1. Distribution of the Reviewed Studies by Year
A distribution of the reviewed studies by year is presented in Figure 1. It can be observed that over 70% of the reviewed studies were published after 2016. Furthermore, more than 50% of the reviewed studies were published after 2017 (see Figure 2). Therefore, it can be concluded that the CDT truck scheduling problem continues receiving increasing attention of the community. Such a pattern can be explained by the effectiveness of the cross-docking concept and its wide implementation within different supply chains. As more and more supply chains implement the cross-docking concept, the CDT operators have to focus on improving the quality of truck schedules in order to avoid potential delivery delays to the end customers.
3.2. CDT Shape Considered
As discussed by Sheikholeslam and Emamian [14], the selection of the appropriate CDT shape is critical for proper operations. For example, the I-shape is the most suitable for the CDTs with less than ≈150 doors, while the X-shape is generally more appropriate for the CDTs with more than ≈200 doors [14]. On the other hand, the T-shape suits for the intermediate-size CDTs [14]. Some of the reviewed studies proposed the CDT truck scheduling models, where the modeled CDTs had the I-shapes [34,35,38,44,57,59]. The I-shape is considered as one of the most commonly used shapes for CDTs [21,34,35]. However, the majority of the reviewed studies proposed generic mathematical models and/or solution methodologies that can be applied for truck scheduling at CDTs with different shapes (e.g., the T-shape, the L-shape, and the X-shape).
3.3. CDT Doors Considered
A distribution of the reviewed studies by the doors considered is presented in Figure 1. Most of the studies, reviewed in this survey (i.e., a total of 30 studies), considered both receiving and shipping doors in the proposed mathematical models. Chargui et al. [49] considered the scheduling of trucks at shipping doors only, since the cargoes were delivered to the PI-hub CDT by trains and then were transferred to the designated shipping doors by the PI-conveyors. For a number of the reviewed studies, consideration of receiving and shipping doors was not applicable.
3.4. Door Service Mode Considered
A distribution of the reviewed studies by the door service mode considered is presented in Figure 3. A total of 24 studies considered an exclusive-door service mode (see Figure 3), where a given door can serve as either a receiving door or a shipping door. Only five studies modeled the CDTs in a mixed-door service mode, where a given door can serve as a receiving door and a shipping door. As highlighted by Ladier and Alpan [21], the mixed-door service mode may be more advantageous as compared to the exclusive-door service mode, as the arriving trucks will not have to wait until the designated doors will be available for service (therefore, the total truck waiting time could be significantly reduced). Furthermore, some CDTs, operating in an exclusive-door service mode, can be converted to a mixed-door service mode. Such door service mode conversion allows handling higher volumes of the arriving trucks during peak periods.
3.5. Preemption
As discussed earlier, preemption is an operational technique, which allows a given IT or OT unloading or loading some of its products, leaving the dock for other trucks, and returning later to complete its service. Only two studies modeled preemption throughout the cross-docking operations—Mohtashami [22] and Fazel Zarandi et al. [46]. Therefore, the majority of the CDT truck scheduling studies still focuses on the conventional truck service operations, where each truck will stay at the assigned door until its service is completed.
3.6. Internal Transportation Mode Used
A distribution of the reviewed studies by the internal transportation mode used is presented in Figure 4. It can be observed that the majority of studies (i.e., a total of 15 studies) considered a manual transportation mode, where forklift operators are typically used to transfer the products within the facility. On the other hand, only seven studies considered an automatic transportation mode, where conveyor belts are typically used to transfer the products within the facility. Some of the reviewed studies did not specify the internal transportation mode used.
3.7. CDT Temporary Storage Capacity and Resource Capacity
Distributions of the reviewed studies by the temporary storage capacity considered and the resource capacity considered are presented in Figure 5. It was found that the majority of the reviewed studies considered an unlimited capacity of the temporary storage and handling resources (i.e., 20 studies and 15 studies, respectively). A total of nine studies modeled the CDTs with a limited temporary storage capacity, while 10 studies captured a limited capacity of the available handling resources. Therefore, the CDT truck scheduling studies generally do not account for a limited capacity of the temporary storage areas and the available handling resources. Nevertheless, in real-life cross-docking operations, the CDT operators face the temporary storage capacity constraints as well as the handling resource capacity constraints [21].
3.8. Objectives Considered
A distribution of the reviewed studies by the objective components considered is presented in Figure 6. It was found that the majority of the reviewed studies aimed to minimize the makespan (a total of 10 studies) and the total cost, associated with the cross-docking operations (a total of 10 studies). The latter finding is in line with the results, reported by Ladier and Alpan [21], where minimization of the truck service makespan was found to be one of the most popular objectives of the presented CDT truck scheduling models. A significant number of studies aimed to minimize late truck departures (a total of nine studies). Some of the reviewed studies presented the mathematical models, aiming to minimize early truck departures (a total of four studies), total truck handling time (a total of three studies), total product storage time (a total of six studies), and total truck waiting time (a total of six studies). A number of the proposed models focused on other objectives (e.g., dissatisfaction of the transportation providers, total travel distance by the internal transportation equipment, fuel consumption, and energy consumption).
3.9. Solution Methods Adopted
A detailed evaluation of the reviewed studies revealed a variety of different solution methodologies, which were applied to solve the CDT truck scheduling problems, including ACO, CPLEX, DE, EA, PSO, SA, TS, VNS, and others (see Figure 7). Due to the computational complexity of the presented mathematical formulations, heuristic and metaheuristic algorithms were preferential over the exact optimization approaches (e.g., CPLEX, GUROBI, and LINGO), as they are able to achieve good-quality solutions within a reasonable computational time. The exact optimization approaches were primarily used to assess the quality of solutions, obtained by the developed heuristic and metaheuristic algorithms, for the small-size problem instances (since the exact optimization approaches generally demonstrated a poor performance for the large-size problem instances). Among the proposed metaheuristic algorithms, the EA-based algorithms and the SA-based algorithms were found to be the most common. Several studies adopted multi-objective EA-based algorithms to tackle CDT truck scheduling problems [45,46,47,48,50].
4. Summary of Findings and Existing Research Needs
Based on the conducted comprehensive literature review, the following key findings and research limitations have been revealed:
- The conducted survey identified increasing attention of the community to the CDT truck scheduling problem. More than 50% of the reviewed studies were published after 2017. Due to increasing trade volumes and wide implementation of the cross-docking concept, more and more studies are seeking for the methods that can assist the CDT operators with effective truck scheduling;
- The majority of the reviewed studies proposed generic mathematical models and/or solution methodologies that can be applied for truck scheduling at CDTs with different shapes. On the other hand, Ladier and Alpan [21] revealed that most of the studies specifically modeled the I-shape CDTs. As highlighted by Sheikholeslam and Emamian [14], the selection of the appropriate CDT shape is critical for proper operations. Therefore, the future CDT truck scheduling studies should focus on capturing the effects of CDT shape on truck schedules;
- Approximately 70% of the reviewed studies considered an exclusive-door service mode, where the available CDT doors are classified as either receiving doors (specifically dedicated for service of ITs) or shipping doors (specifically dedicated for service of OTs). The latest extensive literature survey, performed by Ladier and Alpan [21], found that more than 70% of studies also relied on an exclusive-door service mode. Despite potential advantages of the mixed-door service mode (e.g., the arriving trucks will not have to wait until the designated doors will be available for service), it was considered only in a few CDT truck scheduling studies. Therefore, the future CDT truck scheduling studies should focus on modeling CDTs with a mixed-door service mode;
- It is noteworthy that there exist CDTs that could be converted from the exclusive-door service mode to the mixed-door service mode (and vice versa) depending on the truck service demand patterns. However, the latter operational pattern has not been considered by the existing CDT truck scheduling studies;
- Only two studies considered preemption throughout the CDT truck scheduling—Mohtashami [22] and Fazel Zarandi et al. [46]. Despite potential advantages of preemption (e.g., reducing the waiting time of trucks that carry priority cargo, improving the overall efficiency of the CDT operations), the CDT truck scheduling studies primarily modeled the conventional truck service operations, where each truck would stay at the assigned door until its service is completed. The latter tendency had been also identified in the previous survey, which was performed by Ladier and Alpan [21]. Therefore, the future CDT truck scheduling studies should focus on modeling CDTs where preemption is allowed;
- The reviewed CDT truck scheduling studies mostly considered a manual transportation mode for the product transfer within a CDT (i.e., the products are transferred within a CDT using forklift operators). Only a few CDT truck scheduling studies considered an automatic transportation mode for the product transfer within a CDT (i.e., the products are transferred within a CDT using conveyor belts). The latest extensive literature survey, performed by Ladier and Alpan [21], found that more than 50% of studies also relied on a manual transportation mode for the product transfer within a CDT. Therefore, the future CDT truck scheduling studies should focus on modeling CDTs with an automatic transportation mode;
- The majority of the reviewed studies considered an unlimited capacity of the temporary storage and handling resources in the proposed CDT truck scheduling mathematical formulations. Such assumption allowed reducing the complexity of the proposed CDT truck scheduling mathematical formulations; however, the capacity of temporary storage and handling resources is limited in reality. The latter critical drawback was also pointed out by Ladier and Alpan [21]. Therefore, the future CDT truck scheduling studies should focus on modeling CDTs, considering the temporary storage capacity constraints as well as the handling resource capacity constraints;
- As pointed out by Ladier and Alpan [21], many CDT truck scheduling studies do not impose any constraints/penalties for violation of scheduled truck departures. However, the present survey revealed that recent CDT truck scheduling studies started focusing more on reducing processing time deviations for the arriving trucks and imposed penalties for early truck departures and/or late truck departures in the proposed mathematical models;
- The majority of the reviewed studies focuses on the minimization of the truck service makespan. The same tendency had been identified in the previous survey, conducted by Ladier and Alpan [21]. Only six studies (≈17%) proposed multi-objective optimization models, capturing various criteria that have to be considered by the CDT operators throughout the design of truck schedules. Therefore, the future CDT truck scheduling studies should focus on the development of multi-objective optimization models in order to design more effective truck schedules;
- As it was highlighted by Gelareh et al. [57], development of efficient mathematical models that can capture all the key operational features of the CDT truck scheduling problem without having a high degree of the computational complexity still remains a challenging issue. Therefore, the future CDT truck scheduling studies should focus on the development of alternative mathematical formulations for the CDT truck scheduling problem;
- wide range of different solution methodologies has been proposed to solve the CDT truck scheduling problems, including exact, heuristic, and metaheuristic algorithms. However, most of the studies relied on metaheuristic algorithms due to the computational complexity of the presented mathematical formulations. Metaheuristic algorithms were found to be efficient to solve the large-size problem instances of the CDT truck scheduling problems within a reasonable computational time. The previous survey by Ladier and Alpan [21] discovered that most of the studies primarily relied on heuristic and metaheuristic algorithms in order to solve the CDT truck scheduling problems. However, there is still a need for the exploration of alternative solution algorithms that can provide good-quality solutions for the large-size problem instances of the CDT truck scheduling problems within a reasonable computational time.
5. Concluding Remarks and Future Research Directions
Recent trends in the management of supply chains have witnessed an increasing implementation of the cross-docking strategy. Cross-docking is a logistic procedure, where the products from a supplier or a manufacturing plant are transferred by the inbound trucks to a cross-docking terminal (CDT). Then, the products are deconsolidated, sorted based on the customer’s preferences within a CDT, consolidated, and shipped out to the end customers using the outbound trucks. The cross-docking strategy allows improving various supply chain operations and, therefore, received a lot of attention from researchers, especially over the last decade. This study conducted a comprehensive review of the recent literature with a particular focus on the truck scheduling problem at CDTs. A total of 35 studies, which have not been captured by the latest extensive survey that was conducted by Ladier and Alpan [21] in 2016, were reviewed in detail. The following key attributes were analyzed: CDT shape considered, CDT doors considered, door service mode considered, preemption, internal transportation mode used, temporary storage capacity, resource capacity, objectives considered, and solution methods adopted.
The results from a detailed literature review show that most of the reviewed studies proposed generic mathematical models and/or solution methodologies that can be applied for truck scheduling at CDTs with different shapes. It was also found that the majority of the reviewed studies assumed an exclusive-door service mode throughout the CDT truck scheduling. Only two studies considered preemption, where a given truck is allowed unloading or loading some of its products, leaving the dock for other trucks, and returning later to complete its service. As for the internal transportation mode used, the reviewed CDT truck scheduling studies mostly considered a manual transportation mode for the product transfer within a CDT.
Moreover, the reviewed studies mostly assumed an unlimited capacity of the temporary storage and handling resources in the proposed mathematical formulations, which reduced the computational complexity of the mathematical formulations. The present survey also revealed that the CDT truck scheduling studies still primarily focused on minimization of the truck service makespan. The latter tendency had been also identified in the previous survey, conducted by Ladier and Alpan [21]. Furthermore, recent CDT truck scheduling studies started focusing more on reducing processing time deviations for the arriving trucks and imposed penalties for early truck departures and/or late truck departures in the proposed mathematical models. As for the adopted solution methodologies, most of the studies relied on metaheuristic algorithms due to the computational complexity of the presented mathematical formulations.
The future studies should focus on addressing the limitations of the previously conducted CDT truck scheduling efforts, which were identified in the present survey. Some of the critical future research needs include the following: (1) the future CDT truck scheduling studies should focus on capturing the effects of CDT shape on truck schedules; (2) the future CDT truck scheduling studies should focus on modeling CDTs with a mixed-door service mode; (3) the future CDT truck scheduling studies should focus on modeling CDTs where preemption is allowed; (4) the future CDT truck scheduling studies should focus on modeling CDTs with an automatic transportation mode; (5) the future CDT truck scheduling studies should focus on modeling CDTs, considering the temporary storage capacity constraints as well as the handling resource capacity constraints; (6) the future CDT truck scheduling studies should focus on the development of multi-objective optimization models in order to design more effective truck schedules; (7) the future CDT truck scheduling studies should focus on the development of computationally efficient mathematical formulations for the CDT truck scheduling problem; and (8) the future CDT truck scheduling studies should focus on the exploration of alternative solution algorithms that can provide good-quality solutions for the large-size problem instances of the CDT truck scheduling problems within a reasonable computational time.
Also, there are a number of potential future research extensions for the survey, which was conducted as a part of this study. In particular, the performed study can be extended by conducting interviews with practitioners and the CDT operators. Such interviewers will allow identifying recent truck scheduling trends at CDTs from the practitioner perspectives and determine whether these perspectives receive adequate attention in the academic literature. Subsequently, a set of constructive recommendations should be provided in order to fill the critical gaps between the state-of-the-art and the state-of-the-practice. Furthermore, some of the literature search delimitations can be relaxed as a part of future research. The studies, published in conference proceedings, scientific manuscripts (i.e., Masters theses and Ph.D. dissertations), and technical reports, which focused on the CDT truck scheduling, can be considered as well. Another important future research extension for this study is to conduct additional surveys and capture the literature, which is related to other CDT decision problems (e.g., determination of the CDT shape, determination of the number of CDT doors, allocation of the CDT storage areas, selection of the transportation equipment type for the internal product transfer, scheduling of the available internal transportation resources).
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: O.T. and M.A.D.; data collection: O.T., M.K., J.P., and O.F.A.; analysis and interpretation of results: O.T. and M.A.D.; draft manuscript preparation: O.T., M.A.D., J.P., O.F.A., and M.K.. All authors reviewed the results and approved the final version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Umang, N.; Bierlaire, M.; Erera, A.L. Real-time management of berth allocation with stochastic arrival and handling times. J. Sched. 2017, 20, 67–83. [Google Scholar] [CrossRef]
- Zhen, L.; Liang, Z.; Zhuge, D.; Lee, L.H.; Chew, E.P. Daily berth planning in a tidal port with channel flow control. Transp. Res. Part B Methodol. 2017, 106, 193–217. [Google Scholar]
- Dulebenets, M.A. A comprehensive multi-objective optimization model for the vessel scheduling problem in liner shipping. Int. J. Prod. Econ. 2018, 196, 293–318. [Google Scholar]
- Dulebenets, M.A. Green vessel scheduling in liner shipping: Modeling carbon dioxide emission costs in sea and at ports of call. Int. J. Transp. Sci. Technol. 2018, 7, 26–44. [Google Scholar] [CrossRef]
- Dulebenets, M.A.; Kavoosi, M.; Abioye, O.F.; Pasha, J. A Self-Adaptive Evolutionary Algorithm for the berth scheduling problem: Towards efficient parameter control. Algorithms 2018, 11, 100. [Google Scholar]
- Dulebenets, M.A. Minimizing the total liner shipping route service costs via application of an efficient collaborative agreement. IEEE Trans. Intell. Transp. Syst. 2019, 20, 123–136. [Google Scholar]
- Xiang, X.; Liu, C.; Miao, L. Reactive strategy for discrete berth allocation and quay crane assignment problems under uncertainty. Comput. Ind. Eng. 2018, 126, 196–216. [Google Scholar] [CrossRef]
- Guo, F.; Liu, Q.; Liu, D.; Guo, Z. On Production and Green Transportation Coordination in a Sustainable Global Supply Chain. Sustainability 2017, 9, 2071. [Google Scholar] [Green Version]
- Zhu, L.; Ren, X.; Lee, C.; Zhang, Y. Coordination Contracts in a Dual-Channel Supply Chain with a Risk-Averse Retailer. Sustainability 2017, 9, 2148. [Google Scholar] [Green Version]
- Dong, C.; Li, Q.; Shen, B.; Tong, X. Sustainability in Supply Chains with Behavioral Concerns. Sustainability 2019, 11, 4071. [Google Scholar]
- Perez-Mesa, J.C.; Piedra-Munoz, L.; Garcia-Barranco, M.; Giagnocavo, C. Response of Fresh Food Suppliers to Sustainable Supply Chain Management of Large European Retailers. Sustainability 2019, 11, 3885. [Google Scholar] [Green Version]
- Masoumi, S.M.; Kazemi, N.; Abdul-Rashid, S.H. Sustainable Supply Chain Management in the Automotive Industry: A Process-Oriented Review. Sustainability 2019, 11, 3945. [Google Scholar] [Green Version]
- Stalk, G.; Evans, P.; Sgulman, L.E. Competing on capabilities: The new rules of corporate strategy. Harv. Bus. Rev. 1992, 70, 57–69. [Google Scholar] [PubMed]
- Sheikholeslam, M.N.; Emamian, S. A Review and Classification of Cross-Docking Concept. Int. J. Learn. Manag. Syst. 2016, 4, 25–33. [Google Scholar]
- Vogt, J. The successful cross-dock based supply chain. J. Bus. Logist. 2010, 31, 99–119. [Google Scholar] [CrossRef]
- Van Belle, J.; Valckenaers, P.; Cattrysse, D. Cross-docking: State of the art. Omega 2012, 40, 827–846. [Google Scholar] [Green Version]
- Saddle Creek Corp. Cross-Docking Trend Report; Whitepaper Series; Saddle Creek Corp: Lakeland, FL, USA, 2011. [Google Scholar]
- Jayant, R. Supply Chains: Definitions & Basic Concepts; Department of Industrial Engineering, University of Pittsburg: Pittsburgh, PA, USA, 2016. [Google Scholar]
- Agustina, D.; Lee, C.K.M.; Piplani, R. A review: Mathematical models for cross-docking planning. Int. J. Eng. Bus. Manag. 2010, 2, 47–54. [Google Scholar]
- Shuib, A.; Fatthi, W.N. A review on Quantitative approach for Dock Door Assignment in Cross-docking. Int. J. Adv. Sci. Eng. Inf. Technol. 2012, 2, 370–374. [Google Scholar]
- Ladier, A.; Alpan, G. Cross-Docking Operations: Current Research versus Industry Practice. Omega 2016, 62, 145–162. [Google Scholar]
- Mohtashami, A. Scheduling trucks in cross-docking systems with temporary storage and repetitive pattern for shipping trucks. Appl. Soft Comput. 2015, 36, 468–486. [Google Scholar] [CrossRef]
- Yu, W.; Egbelu, P.J. Scheduling of inbound and outbound trucks in cross-docking systems with temporary storage. Eur. J. Oper. Res. 2008, 184, 377–396. [Google Scholar]
- Arkat, J.; Qods, P.; Ahmadizar, F. Truck scheduling problem in a cross-docking system with a release time constraint. J. Ind. Syst. Eng. 2016, 9, 1–16. [Google Scholar]
- Assadi, M.T.; Bagheri, M. Differential evolution and Population-based simulated annealing for truck scheduling problem in multiple door cross-docking systems. Comput. Ind. Eng. 2016, 96, 149–161. [Google Scholar] [CrossRef]
- Cota, P.M.; Gimenez, B.M.R.; Araújo, D.P.M.; Nogueira, T.H.; de Souza, M.C.; Ravetti, M.G. Time-indexed formulation and polynomial time heuristic for a multi-dock truck scheduling problem in a cross-docking centre. Comput. Ind. Eng. 2016, 95, 135–143. [Google Scholar]
- Chen, F.; Song, K. Minimizing makespan in two-stage hybrid cross docking scheduling problem. Comput. Oper. Res. 2009, 36, 2066–2073. [Google Scholar]
- Golshahi-Roudbaneh, A.; Hajiaghaei-Keshteli, M.; Paydar, M.M. Developing a Lower Bound and Strong Heuristics for a Truck Scheduling Problem in a Cross-Docking Center. Knowl. Based Syst. 2017, 129, 17–38. [Google Scholar]
- Khalili-Damghani, K.; Tavana, M.; Santos-Arteaga, F.J.; Ghanbarzad-Dashti, M.A. A customized genetic algorithm for solving multi-period cross-dock truck scheduling problems. Measurement 2017, 108, 101–118. [Google Scholar]
- Luo, C.; Ting, C. An Ant Colony Optimization for the Multi-Dock Truck Scheduling Problem with Cross-Docking. Int. J. Oper. Res. 2017, 14, 77–87. [Google Scholar]
- Wisittipanich, W.; Hengmeechai, P. Truck scheduling in multi-door cross docking terminal by modified particle swarm optimization. Comput. Ind. Eng. 2017, 113, 793–802. [Google Scholar] [CrossRef]
- Serrano, C.; Delorme, X.; Dolgui, A. Scheduling of truck arrivals, truck departures and shop-floor operation in a cross-dock platform, based on trucks loading plans. Int. J. Prod. Econ. 2017, 194, 102–112. [Google Scholar]
- Behnamian, J.; Fatemi Ghomi, S.M.T.; Jolai, F.; Heidary, P. Location-Allocation and Scheduling of Inbound and Outbound Trucks in Multiple Cross-Dockings Considering Breakdown Trucks. J. Optim. Ind. Eng. 2018, 11, 51–65. [Google Scholar]
- Dulebenets, M.A. A Diploid Evolutionary Algorithm for sustainable truck scheduling at a cross-docking facility. Sustainability 2018, 10, 1333. [Google Scholar]
- Dulebenets, M.A. A comprehensive evaluation of weak and strong mutation mechanisms in Evolutionary Algorithms for truck scheduling at cross-docking terminals. IEEE Access 2018, 6, 65635–65650. [Google Scholar] [CrossRef]
- Ladier, A.; Alpan, G. Cross-dock truck scheduling with time windows: Earliness, tardiness, and storage policies. J. Int. Manuf. 2018, 29, 569–583. [Google Scholar]
- Wang, Z.; Lu, Y.; Zhao, L.; Cao, N. Improved Harmony Search Algorithm for Truck Scheduling Problem in Multiple-Door Cross-Docking Systems. Discret. Dyn. Nat. Soc. 2018, 2018, 7913256. [Google Scholar]
- Dulebenets, M.A. A Delayed Start Parallel Evolutionary Algorithm for just-in-time truck scheduling at a cross-docking facility. Int. J. Prod. Econ. 2019, 212, 236–258. [Google Scholar] [CrossRef]
- Fonseca, G.B.; Nogueira, T.H.; Ravetti, M.G. A hybrid Lagrangian metaheuristic for the cross-docking flow shop scheduling problem. Eur. J. Oper. Res. 2019, 275, 139–154. [Google Scholar]
- Chen, F.; Lee, C.Y. Minimizing the makespan in a two-machine cross-docking flow shop problem. Eur. J. Oper. Res. 2009, 193, 59–72. [Google Scholar] [CrossRef]
- Seyedi, I.; Hamedi, M.; Tavakkoli-Moghaddam, R. Truck scheduling in a cross-docking terminal by using a novel robust heuristics. IJE Int. J. Eng. Trans. B Appl. 2019, 32, 296–305. [Google Scholar]
- Yu, W. Operational Strategies for Cross-Docking Systems. Ph.D. Thesis, Iowa State University, Ames, IA, USA, 2002. [Google Scholar]
- Vahdani, B.; Shahramfard, S. A truck scheduling problem at a cross-docking facility with mixed service mode dock doors. Eng. Comput. 2019, 36, 1977–2009. [Google Scholar]
- Zhang, Y.; Gong, Y.; Chen, W.; Gu, T.; Yuan, H.; Zhang, J. A Dual-Colony ant algorithm for the receiving and shipping door assignment in cross-docks. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2523–2539. [Google Scholar] [CrossRef]
- Amini, A.; Tavakkoli-Moghaddam, R. A bi-objective truck scheduling problem in a cross-docking center with probability of breakdown for trucks. Comput. Ind. Eng. 2016, 96, 180–191. [Google Scholar]
- Fazel Zarandi, M.; Khorshidian, H.; Akbarpour Shirazi, M. A constraint programming model for the scheduling of JIT cross-docking systems with preemption. J. Intell. Manuf. 2016, 27, 297–313. [Google Scholar] [CrossRef]
- Goodarzi, A.H.; Nahavandi, N.; Zegordi, S.H. A Multi-Objective Imperialist Competitive Algorithm for Vehicle Routing Problem in Cross-Docking Networks with Time Windows. J. Ind. Syst. Eng. 2018, 11, 1–23. [Google Scholar]
- Kargari Esfand Abad, H.; Vahdani, B.; Sharifi, M.; Etebari, F. A bi-objective model for pickup and delivery pollution-routing problem with integration and consolidation shipments in cross-docking system. J. Clean. Prod. 2018, 193, 784–801. [Google Scholar] [CrossRef]
- Chargui, T.; Bekrar, A.; Reghioui, M.; Trentesaux, D. Multi-objective sustainable truck scheduling in a rail-road physical internet cross-docking hub considering energy consumption. Sustainability 2019, 11, 3127. [Google Scholar] [CrossRef]
- Fard, S.S.; Vahdani, B. Assignment and scheduling trucks in cross-docking system with energy consumption consideration and trucks queuing. J. Clean. Prod. 2019, 213, 21–41. [Google Scholar] [CrossRef]
- Ladier, A.; Alpan, G. Robust Cross-Dock Scheduling with Time Windows. Comput. Ind. Eng. 2016, 99, 16–28. [Google Scholar]
- Rajabi, M.; Shirazi, M.A. Truck scheduling in a cross-dock system with multiple doors and uncertainty in availability of trucks. J. Appl. Environ. Biol. Sci. 2016, 6, 101–109. [Google Scholar]
- Mousavi, S.M.; Antuchevviciene, J.; Zavadskas, E.K.; Vahdani, B.; Hashemi, H. A new decision model for cross-docking center location in logistics networks under interval-valued intuitionistic fuzzy uncertainty. Transport 2019, 34, 30–40. [Google Scholar]
- Enderer, F.; Contardo, C.; Contreras, I. Integrating dock-door assignment and vehicle routing with cross-docking. Comput. Oper. Res. 2017, 88, 30–43. [Google Scholar]
- Nikolopoulou, A.I.; Repoussis, P.P.; Tarantilis, C.D.; Zachariadis, E.E. Moving products between location pairs: Cross-docking versus direct-shipping. Eur. J. Oper. Res. 2017, 256, 803–819. [Google Scholar]
- Wang, J.; Ranganathan Jagannathan, A.K.; Zuo, X.; Murray, C.C. Two-layer simulated annealing and tabu search heuristics for a vehicle routing problem with cross-docks and split deliveries. Comput. Ind. Eng. 2017, 112, 84–98. [Google Scholar]
- Gelareh, S.; Glover, F.; Guemri, O.; Hanafi, S.; Nduwayo, P.; Todosijevic, R. A Comparative study of formulations for a cross-dock door assignment problem. Omega 2018, in press. [Google Scholar]
- Guignard, M.; Hahn, P.M.; Pessoa, A.A.; da Silva, D.C. Algorithms for the cross-dock door assignment problem. In Proceedings of the Fourth International Workshop Model-Based Metaheuristics, Angra dos Reis, Brazil, 17–20 September 2012. [Google Scholar]
- Nassief, W.; Contreras, I.; Jaumard, B. A Comparison of formulations and relaxations for cross-dock door assignment problems. Comput. Oper. Res. 2018, 94, 76–88. [Google Scholar]
- Schwerdfeger, S.; Boysen, N.; Briskorn, D. Just-in-time logistics for far-distant suppliers: Scheduling truck departures from an intermediate cross-docking terminal. OR Spectrum 2018, 40, 1–21. [Google Scholar]
Figure 1.
Cross-docking terminal.

Figure 2.
Distribution of studies by year.

Figure 3.
Distribution of studies by the doors considered (left) and the door service mode considered (right). Notes: N/A—not applicable.
Figure 3.
Distribution of studies by the doors considered (left) and the door service mode considered (right). Notes: N/A—not applicable.

Figure 4.
Distribution of studies by the internal transportation mode used. Notes: N/A—not applicable; NS—not specified.
Figure 4.
Distribution of studies by the internal transportation mode used. Notes: N/A—not applicable; NS—not specified.

Figure 5.
Distribution of studies by the temporary storage capacity considered (left) and the resource capacity considered (right). Notes: N/A—not applicable; NS—not specified.
Figure 5.
Distribution of studies by the temporary storage capacity considered (left) and the resource capacity considered (right). Notes: N/A—not applicable; NS—not specified.

Figure 6.
Distribution of studies by the objective components considered.

Figure 7.
Distribution of studies by the solution methods adopted.


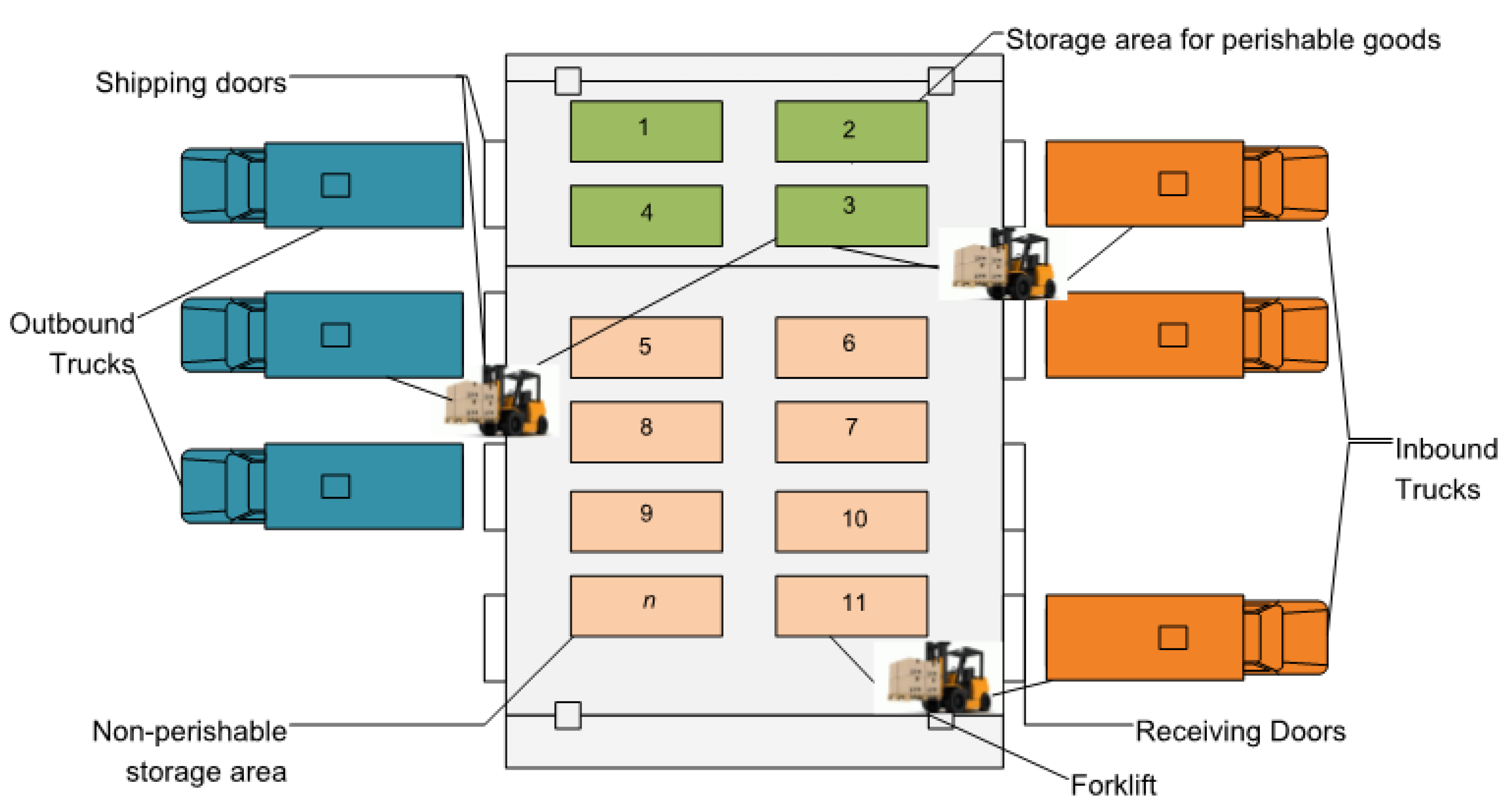{kind=link}
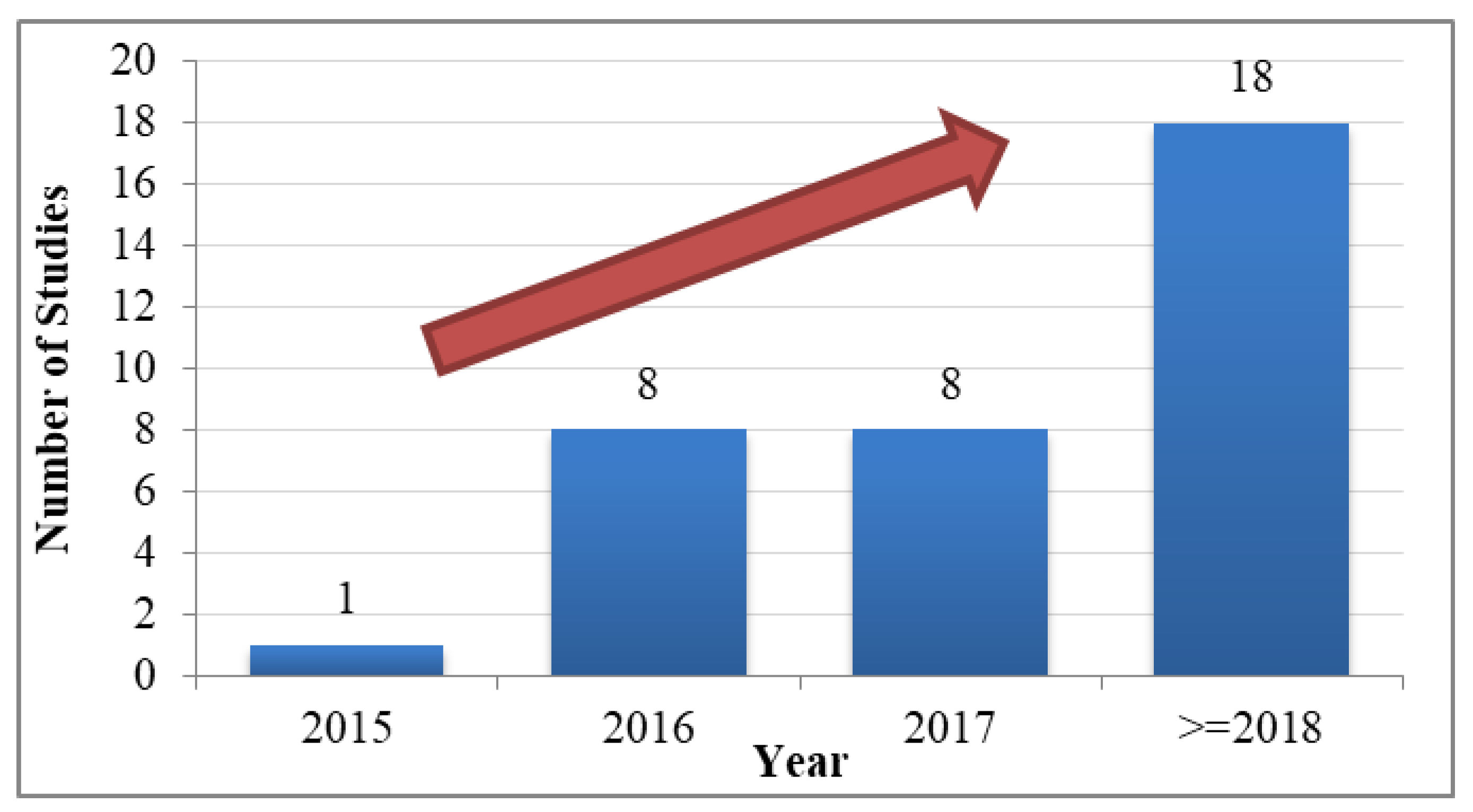{kind=link}
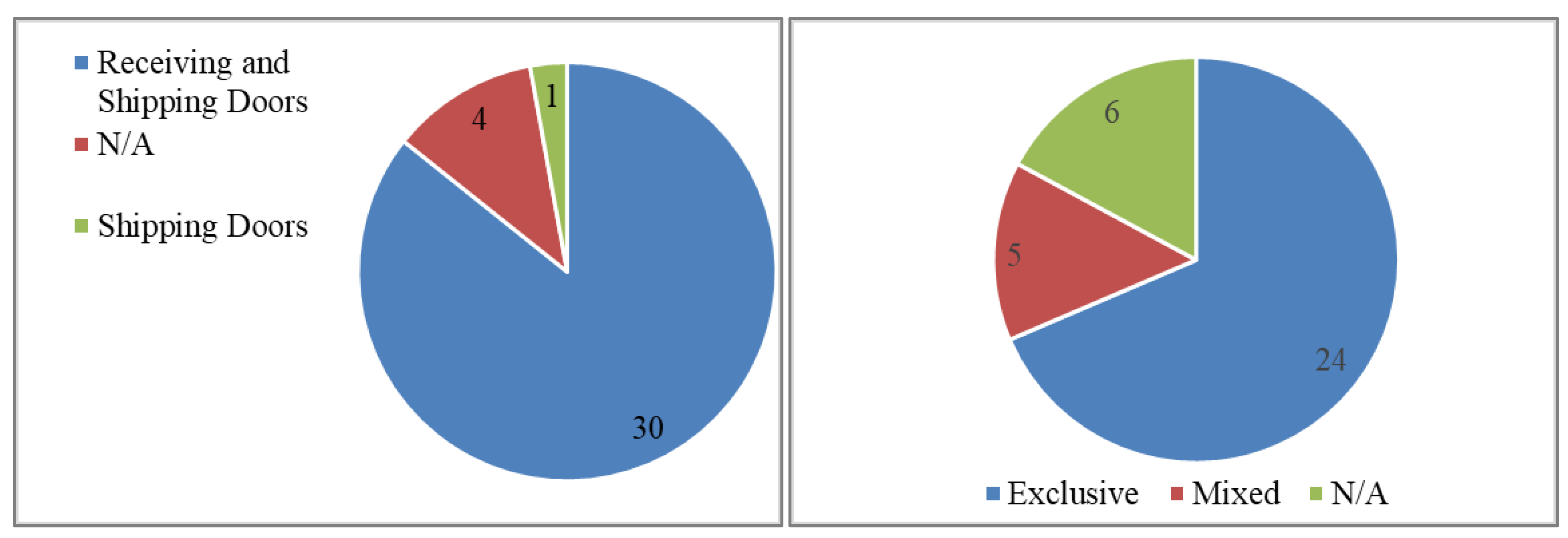{kind=link}
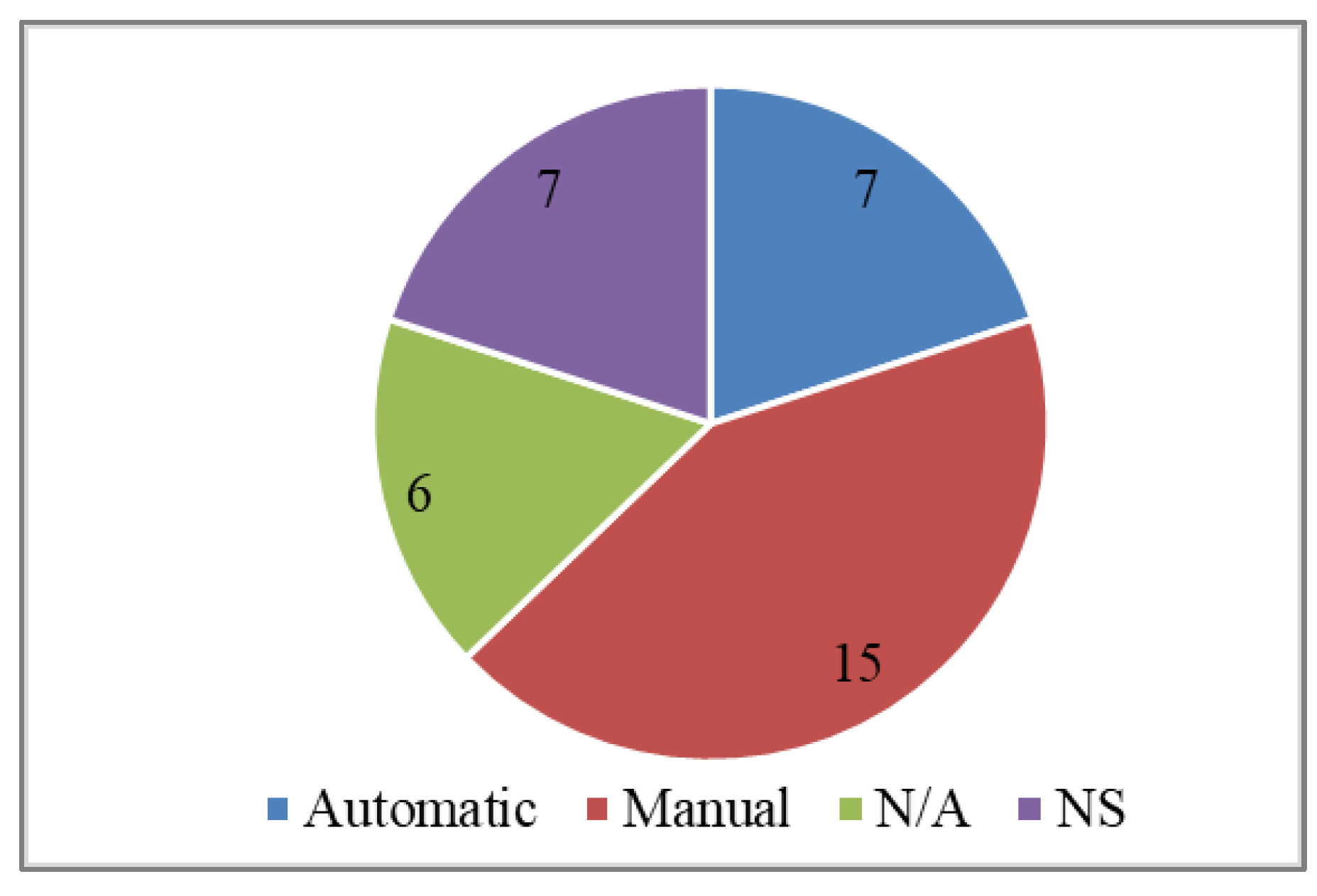{kind=link}
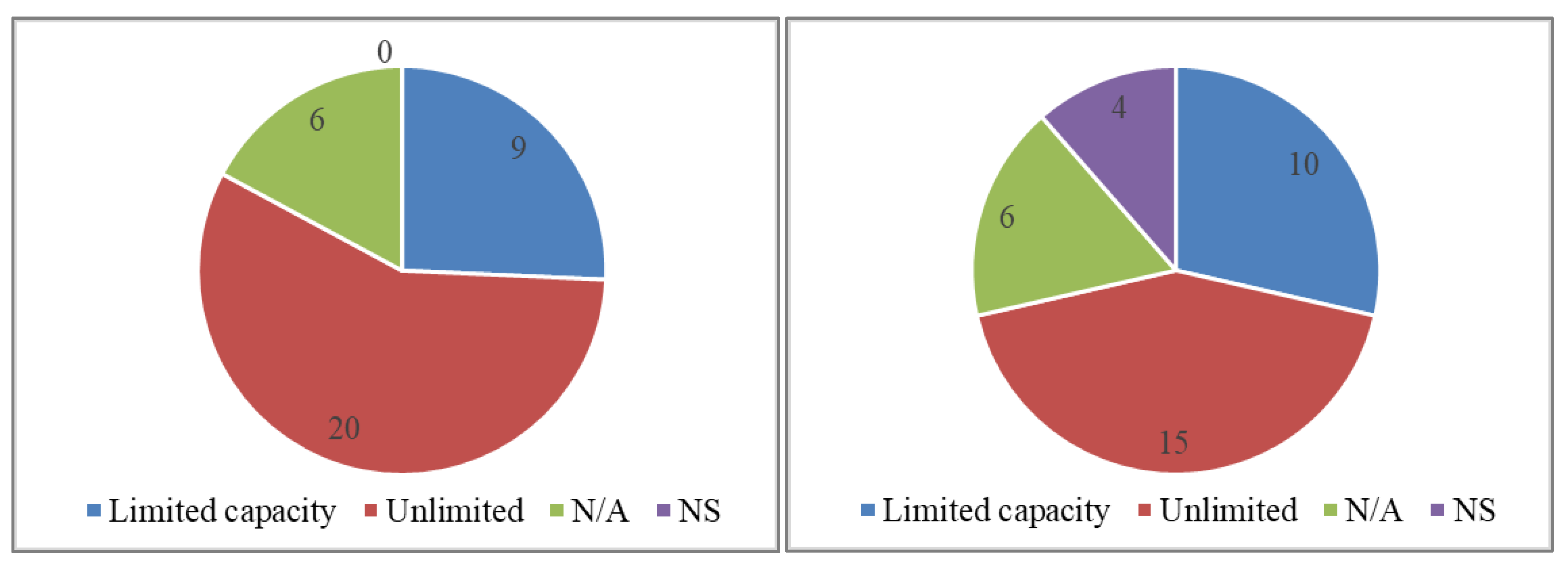{kind=link}
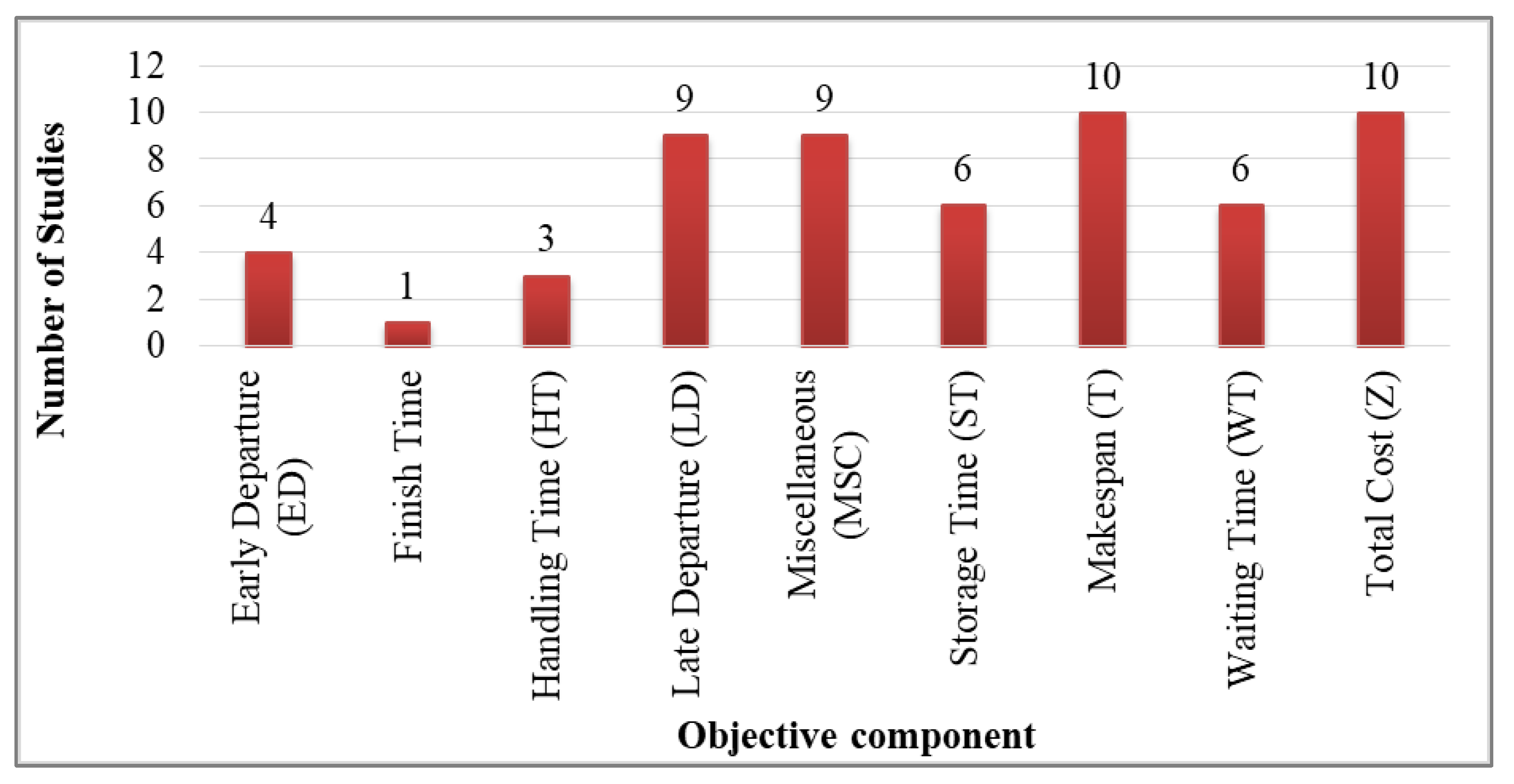{kind=link}
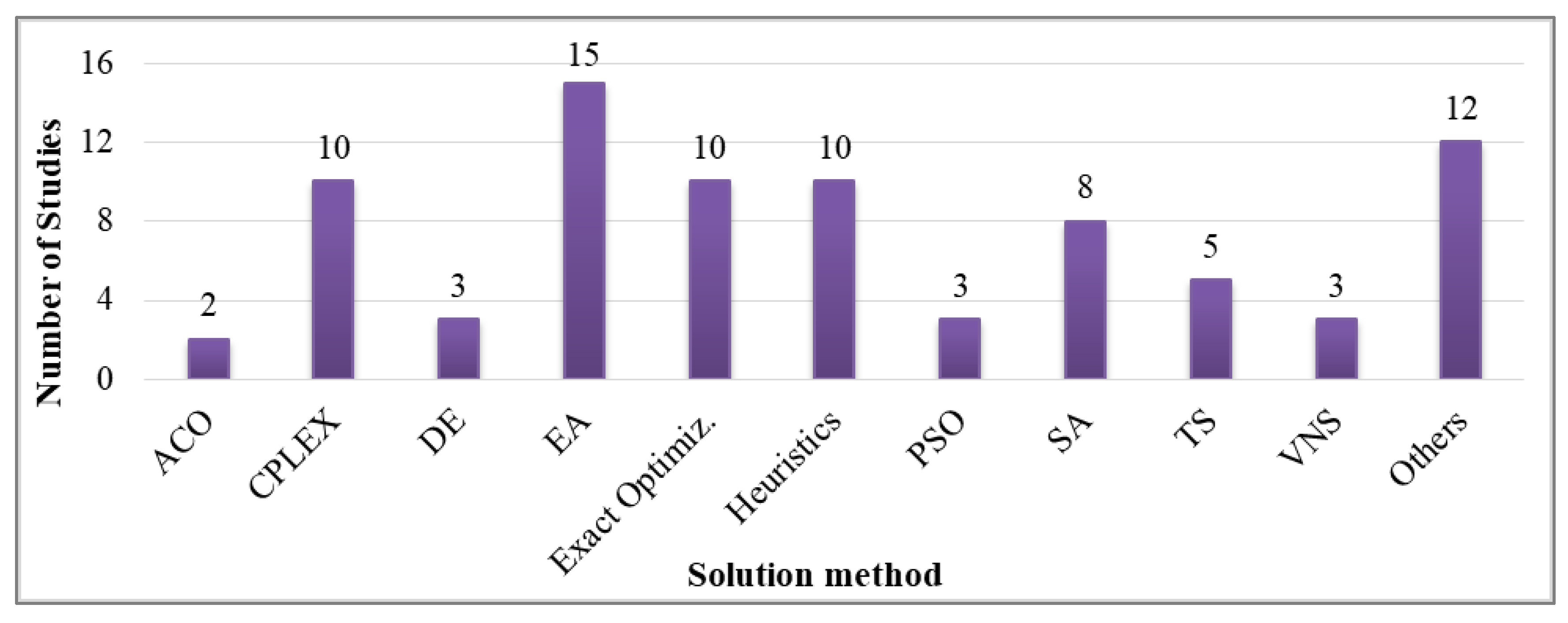{kind=link}
Table 1.
Literature survey summary.
| Author(s) (year) | Objective | Objective Component(s) | Solution Method | Notes |
|---|---|---|---|---|
| General CDT truck scheduling | ||||
| Mohtashami (2015) [22] | Minimize the makespan | T | EA | Scheduling ITs and OTs at a CDT; preemption allowed |
| Arkat et al. (2016) [24] | Minimize the makespan | T | CPLEX, SA | Scheduling ITs and OTs at a CDT |
| Assadi and Bagheri (2016) [25] | Minimize the total early and late departures | ED, LD | DE, SA, CPLEX | Scheduling ITs and OTs at a CDT |
| Cota et al. (2016) [26] | Minimize the makespan | T | CDH, JRH, JLPTH | Scheduling ITs and OTs at a CDT; time-indexed formulation |
| Golshahi-Roudbaneh et al. (2017) [28] | Minimize the makespan | T | EA, KA, SA, SFS, SA-PSO | Scheduling ITs and OTs at a CDT |
| Khalili-Damghani et al. (2017) [29] | Minimize the makespan | T | EA, Exact optimization | Scheduling ITs and OTs at a CDT |
| Luo and Ting (2017) [30] | Minimize the total cost | ST | ACO, Exact optimization | Scheduling ITs and OTs at a CDT |
| Wisittipanich and Hengmeechai (2017) [31] | Minimize the makespan | T | GLNPSO, PSO, Exact optimization | Scheduling ITs and OTs at a CDT |
| Serrano et al. (2017) [32] | Minimize the total cost | Z | CPLEX | Scheduling ITs and OTs at a CDT; penalties for violation of the agreed IT arrival time periods |
| Behnamian et al. (2018) [33] | Minimize the total cost and the sum of makespans at CDTs | Z, T | EA, SA, DE, EA-SA | Location-allocation and truck scheduling at CDTs |
| Dulebenets (2018) [34] | Minimize the total cost | HT, WT, LD | CPLEX, EAs | Diploid Evolutionary Algorithm for truck scheduling at a CDT |
| Dulebenets (2018) [35] | Minimize the total cost | HT, WT, LD | CPLEX, EAs | Scheduling ITs and OTs at a CDT |
| Ladier and Alpan (2018) [36] | Minimize the total number of stored pallets and dissatisfaction of the transportation providers | ST, MSC | Heuristics, TS | Scheduling ITs and OTs at a CDT; internal pallet handling |
| Wang et al. (2018) [37] | Minimize the makespan | T | HS, IHS, EA | Scheduling ITs and OTs at a CDT |
| Dulebenets (2019) [38] | Minimize the total cost | WT, HT, ED, LD, ST | CPLEX, DSPEA, PEA, EA, VNS, TS, SA | Scheduling ITs and OTs at a CDT |
| Fonseca et al. (2019) [39] | Minimize the makespan | T | CPLEX, Heuristics | Scheduling ITs and OTs at a CDT |
| Seyedi et al. (2019) [41] | Minimize the makespan | T | Heuristics | Scheduling ITs and OTs at a CDT |
| Vahdani and Shahramfard (2019) [43] | Minimize the total cost | WT, LD, ST | CPLEX, EA, ICA | Scheduling ITs and OTs at a CDT |
| Zhang et al. (2019) [44] | Minimize the total travel distance | MSC | CPLEX, ACO, EA, Heuristic | Scheduling ITs and OTs at a CDT |
| Multi-objective CDT truck scheduling | ||||
| Amini and Tavakkoli-Moghaddam (2016) [45] | Minimize the total late departures and maximize reliability | LD, FT | MOSA, MODE, NSGA-II | Bi-objective scheduling using pareto solutions and multi-objective metaheuristics |
| Fazel Zarandi et al. (2016) [46] | Minimize the total early departures, the total late departures, and preemption | ED, LD, MSC | EA, Exact optimization | Multi-criteria model with nonlinear terms and integer variables; preemption allowed |
| Goodarzi et al. (2018) [47] | Minimize the total cost, the total early departures, and the total late departures for visiting retailers | Z, ED, LD | MOICA, NSGA-II, PAES | Evaluation of various policies to reduce the number of unnecessary stops at a CDT |
| Kargari Esfand Abad et al. (2018) [48] | Minimize the total cost and the total fuel consumption | Z, MSC | NRGA, NSGA-II, MOPSO | Pick-up and delivery pollution-routing problem with a CDT |
| Chargui et al. (2019) [49] | Minimizes the total cost and total energy consumption | Z, MSC | CPLEX, MO-VNSSA, MO-VNSTS | Scheduling OTs at a rail-road PI-hub CDT |
| Fard and Vahdani (2019) [50] | Minimize the total cost and total energy consumption | WT, LD, ST, MSC | Exact optimization, MOICA, MOGWO, NSGA-II, MOEA/D | Scheduling ITs and OTs at a CDT |
| Uncertainty modeling in CDT truck scheduling | ||||
| Ladier and Alpan (2016) [51] | Minimize the total number of stored pallets and dissatisfaction of the transportation providers | ST, MSC | Heuristics, Exact optimization | Uncertainties in the CDT truck scheduling |
| Rajabi and Shirazi (2016) [52] | Minimize the total truck waiting time | WT | VNS, Exact optimization | Scheduling ITs and OTs at a CDT; uncertainty in truck arrival times |
| Mousavi et al. (2019) [53] | Selection of the CDT location | MSC | Heuristic | Multi-criteria decision making for the CDT location, considering uncertainties |
| Miscellaneous | ||||
| Sheikholeslam and Emamian (2016) [14] | Review of the literature on the cross-docking concept | N/A | Literature review | A comprehensive review of the literature on the cross-docking concept |
| Enderer et al. (2017) [54] | Minimize the total cost | Z | Heuristic, Exact optimization | Scheduling ITs and OTs at a CDT; Vehicle routing with a CDT |
| Nikolopoulou et al. (2017) [55] | Minimize the total cost | Z | Heuristic | Pick-up and delivery problem; Vehicle routing with a CDT |
| Wang et al. (2017) [56] | Minimize the total cost | Z | CH-TLSA, CH-TLTS, CPLEX | Vehicle routing with a CDT |
| Gelareh et al. (2018) [57] | Minimize the total cost | Z | CPLEX | Scheduling of ITs and OTs at a CDT; Evaluation of the alternative mathematical models |
| Nassief et al. (2018) [59] | Minimize the total cost | Z | Exact optimization, Heuristic | Scheduling of ITs and OTs at a CDT; Evaluation of the alternative mathematical models |
| Schwerdfeger et al. (2018) [60] | Minimize the truck fleet size | MSC | Heuristic, Exact optimization | JIT vehicle scheduling from a CDT toward the plant |
Notes for the objective components: ED—Early Departure; FT—Finish time; HT—Handling time; LD—Late Departure; MSC—Miscellaneous; ST—Storage time; T—Makespan; WT—Waiting time; Z—Total cost. Notes for the solution methods: ACO—Ant Colony Optimization; CH-TLSA—a Construction Heuristic (CH) with a Two-Layer SA; CH-TLTS—a Construction Heuristic (CH) with a Two-Layer TS; DE—Differential Evolution; DSPEA—Delayed Start Parallel Evolutionary Algorithm; EA—Evolutionary Algorithm; GLNPSO—Particle Swarm Optimization with combined g-best, l-best, and n-best social structures; HS—Harmony Search; ICA—Imperialist Competitive Algorithm; IHS—Improved Harmony Search; JLPTH—Johnson’s Rule-based Largest Processing Time Heuristic; JRH—Johnson’s Rule-based Ready Time Heuristic; KA—Keshtel Algorithm; MODE—Multi-Objective Differential Evolution; MOEA/D—Multi-Objective Evolutionary Algorithm on Decomposition; MOGWO—Multi-Objective Grey Wolf Optimizer; MOICA—Multi-Objective Imperialist Competitive Algorithm; MOPSO—Multi-Objective Particle Swarm Optimization; MOSA—Multi-Objective Simulated Annealing; MO-VNSSA—Multi-Objective Variable Neighborhood Search with Simulated Annealing; MO-VNSTS—Multi-Objective Variable Neighborhood Search with Tabu Search; NRGA—Non-Dominated Ranking Genetic Algorithm; NSGA-II—Non-Dominated Sorting Genetic Algorithm - II; PAES—Pareto Archived Evolution Strategy; PEA—Parallel Evolutionary Algorithm; PSO—Particle Swam Optimization; SA—Simulated Annealing; SFS—Stochastic Fractal Search; TS—Tabu Search; VNS—Variable Neighborhood Search.
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Theophilus, O.; Dulebenets, M.A.; Pasha, J.; Abioye, O.F.; Kavoosi, M. Truck Scheduling at Cross-Docking Terminals: A Follow-Up State-Of-The-Art Review. Sustainability 2019, 11, 5245. https://0-doi-org.brum.beds.ac.uk/10.3390/su11195245
AMA Style
Theophilus O, Dulebenets MA, Pasha J, Abioye OF, Kavoosi M. Truck Scheduling at Cross-Docking Terminals: A Follow-Up State-Of-The-Art Review. Sustainability. 2019; 11(19):5245. https://0-doi-org.brum.beds.ac.uk/10.3390/su11195245
Chicago/Turabian StyleTheophilus, Oluwatosin, Maxim A. Dulebenets, Junayed Pasha, Olumide F. Abioye, and Masoud Kavoosi. 2019. "Truck Scheduling at Cross-Docking Terminals: A Follow-Up State-Of-The-Art Review" Sustainability 11, no. 19: 5245. https://0-doi-org.brum.beds.ac.uk/10.3390/su11195245
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.