A Highly Reliable Propulsion System with Onboard Uninterruptible Power Supply for Train Application: Topology and Control


Abstract
:1. Introduction
1.1. Onboard Energy Storages
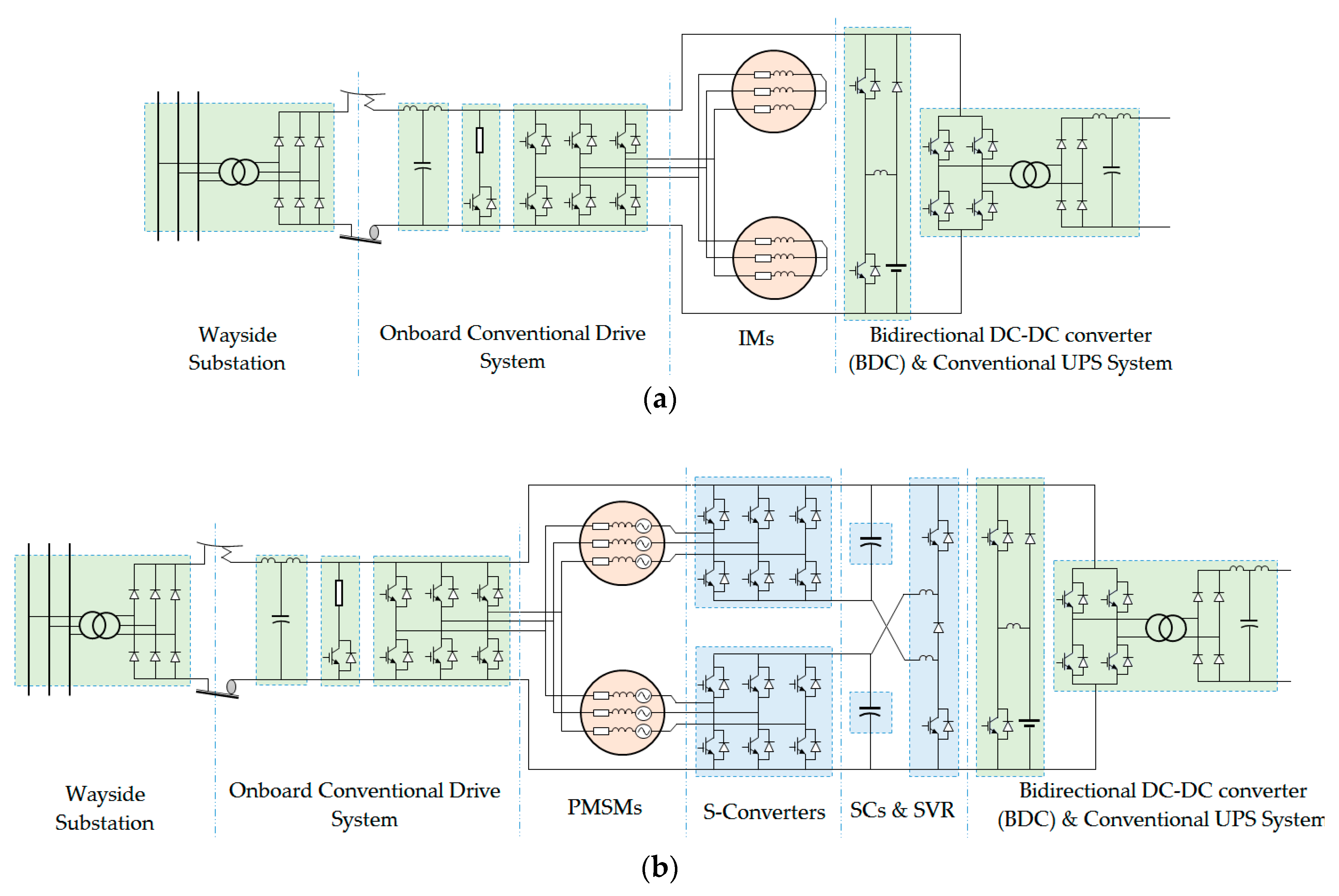
1.2. Propulsion System Topology
1.3. PMSM Drive Control Based on Model Predictive Method
2. The Proposition of Modular MMD with Embedded UPS
2.1. The Power Management Method
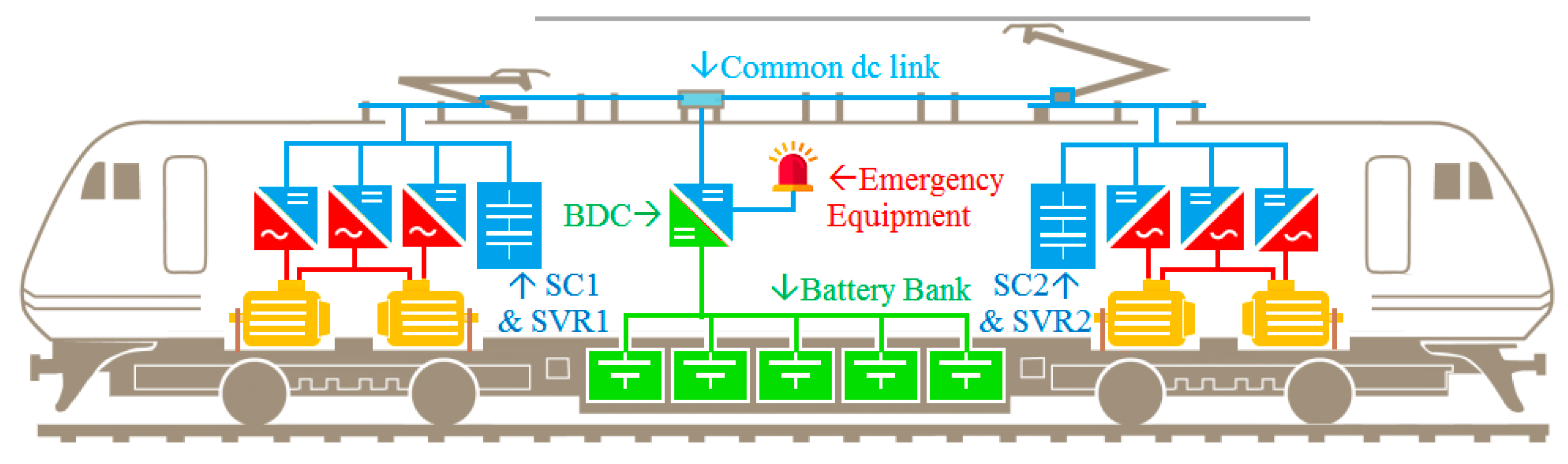
2.2. Supplying Critical Devices Aboard the Train
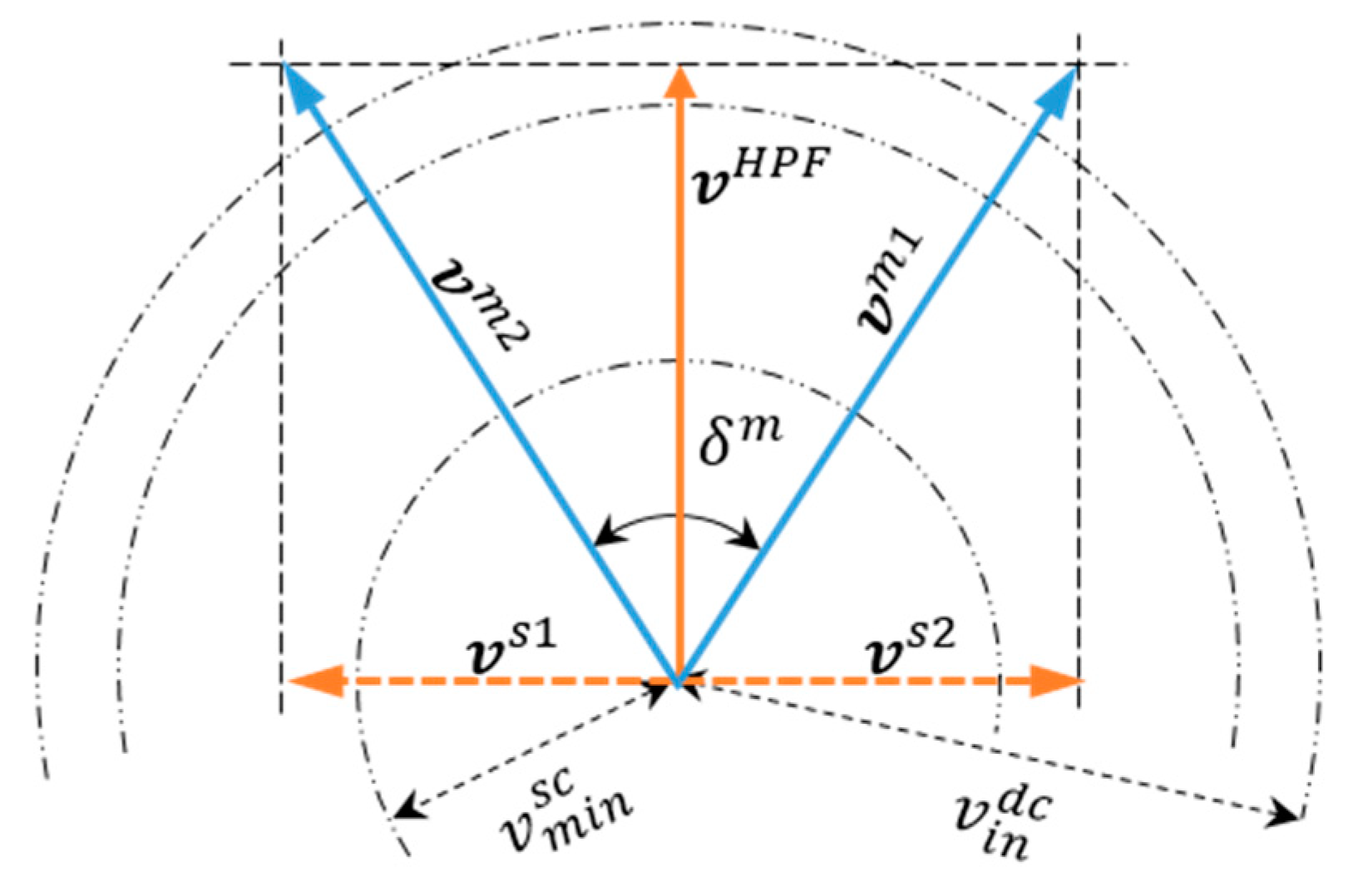
2.3. Extraction of Reference Voltages for DC-AC Converters
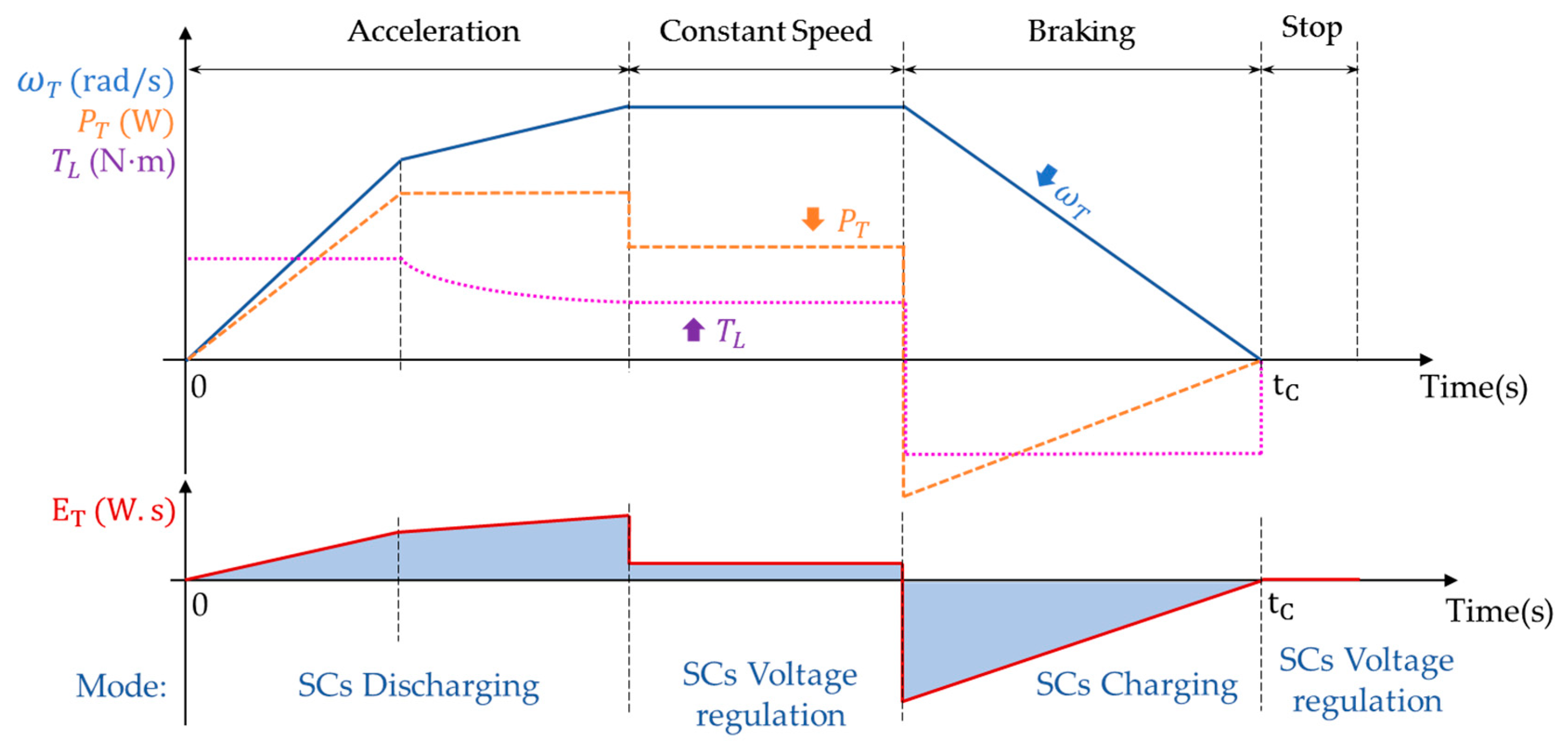
3. Energy Management Strategy
3.1. Soft Acceleration at Motoring State
3.2. Fast Acceleration at Motoring State
3.3. Regenerative State
3.4. Neutral Moving and Stop States
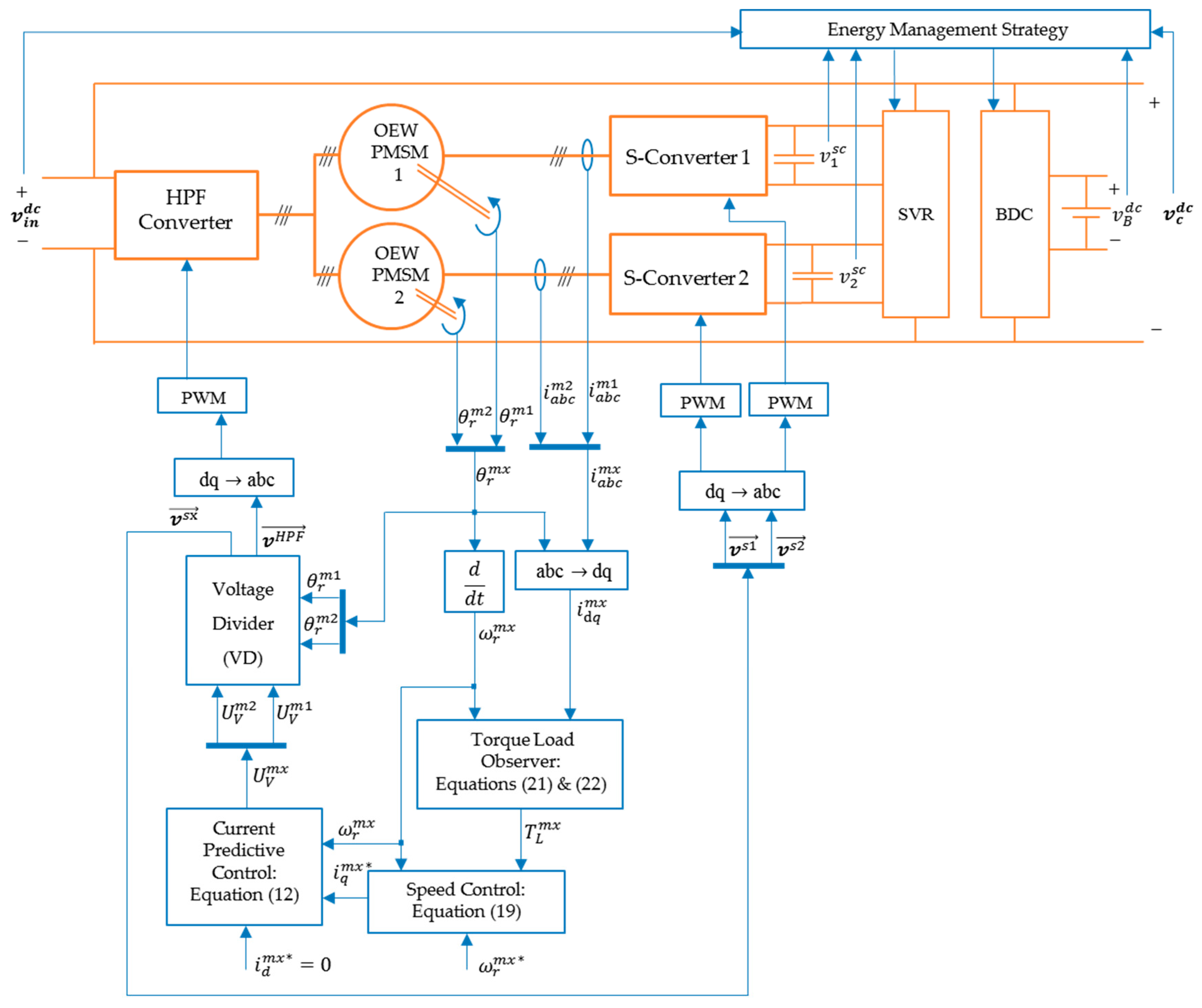
4. Proposed Methodology for Speed and Current Controllers
4.1. Mathematical Modelling of OEW-PMSMs
4.2. Current Predictive Control
4.3. Speed Predictive Control
4.4. Torque Estimation Process
4.5. Impacts of Constraints on the Controller Performance
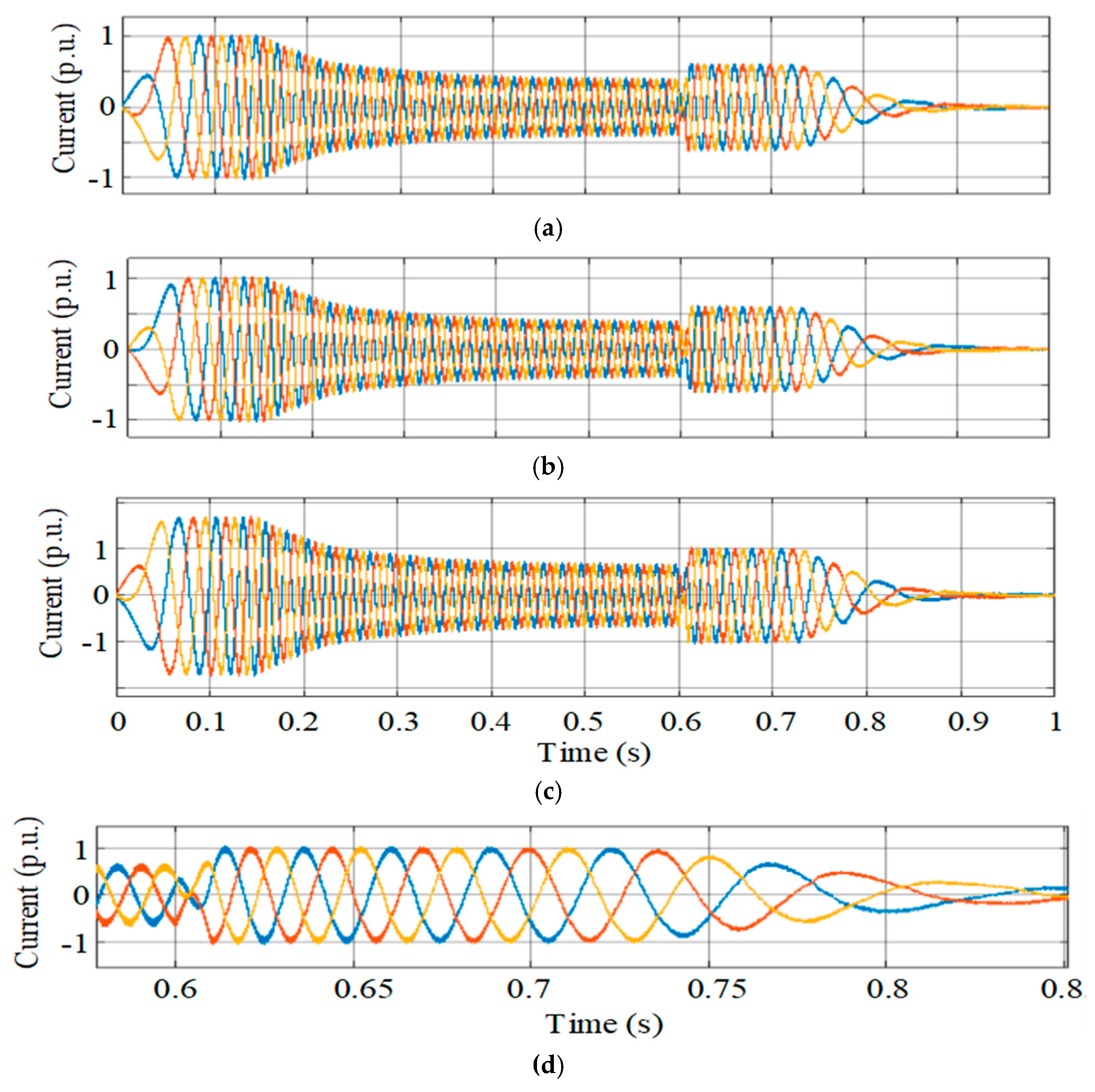
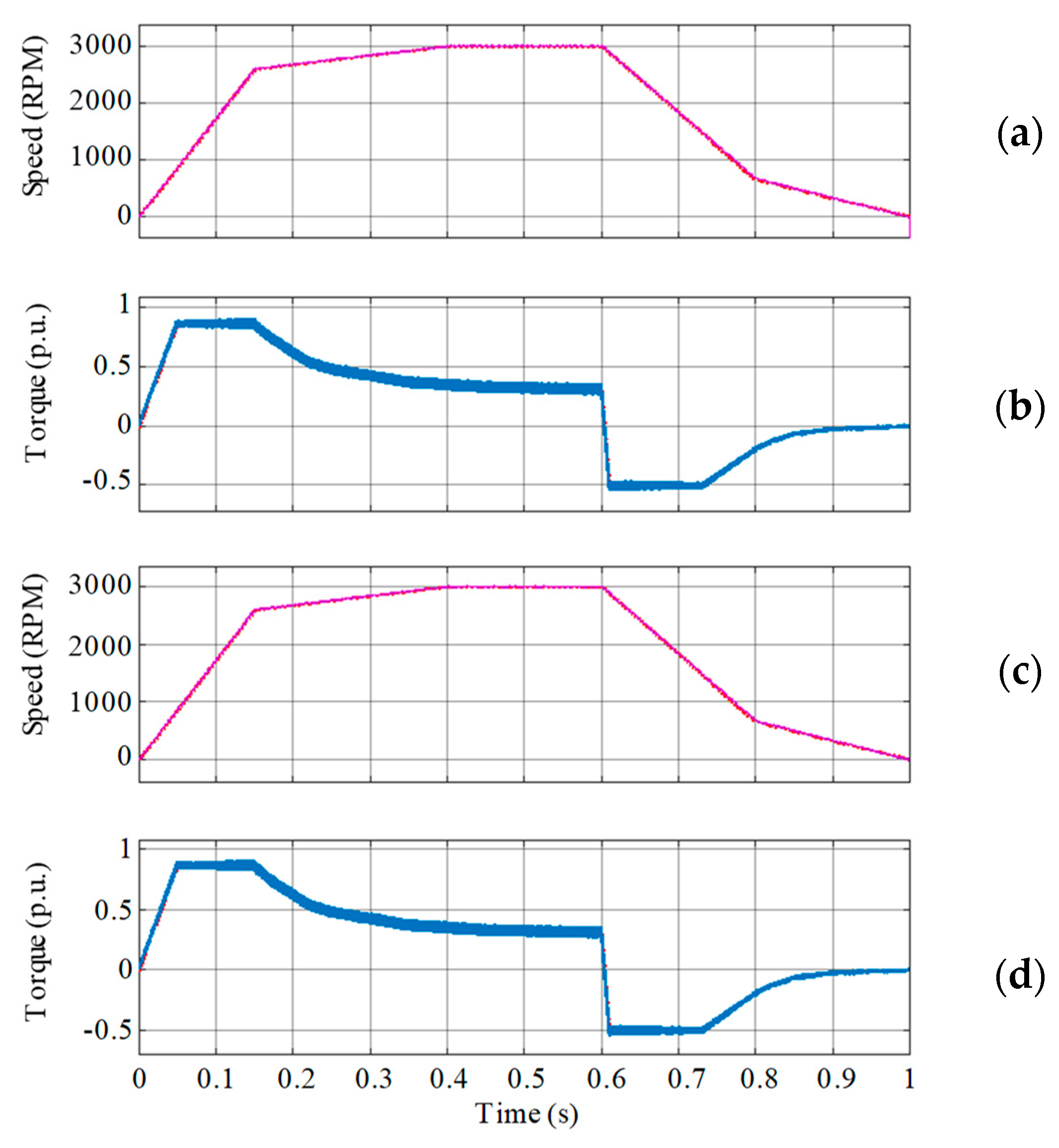
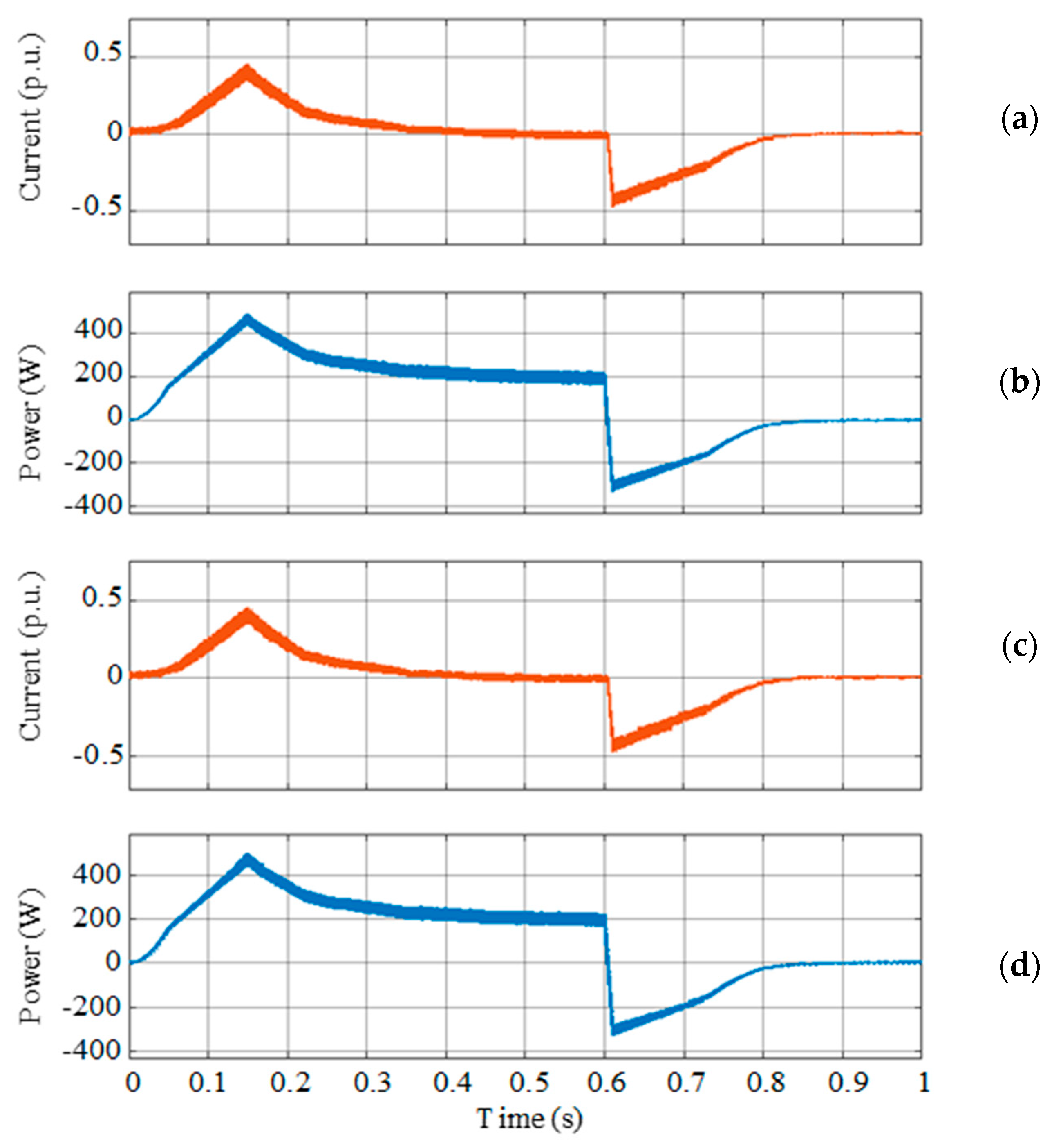
5. Simulation Studies
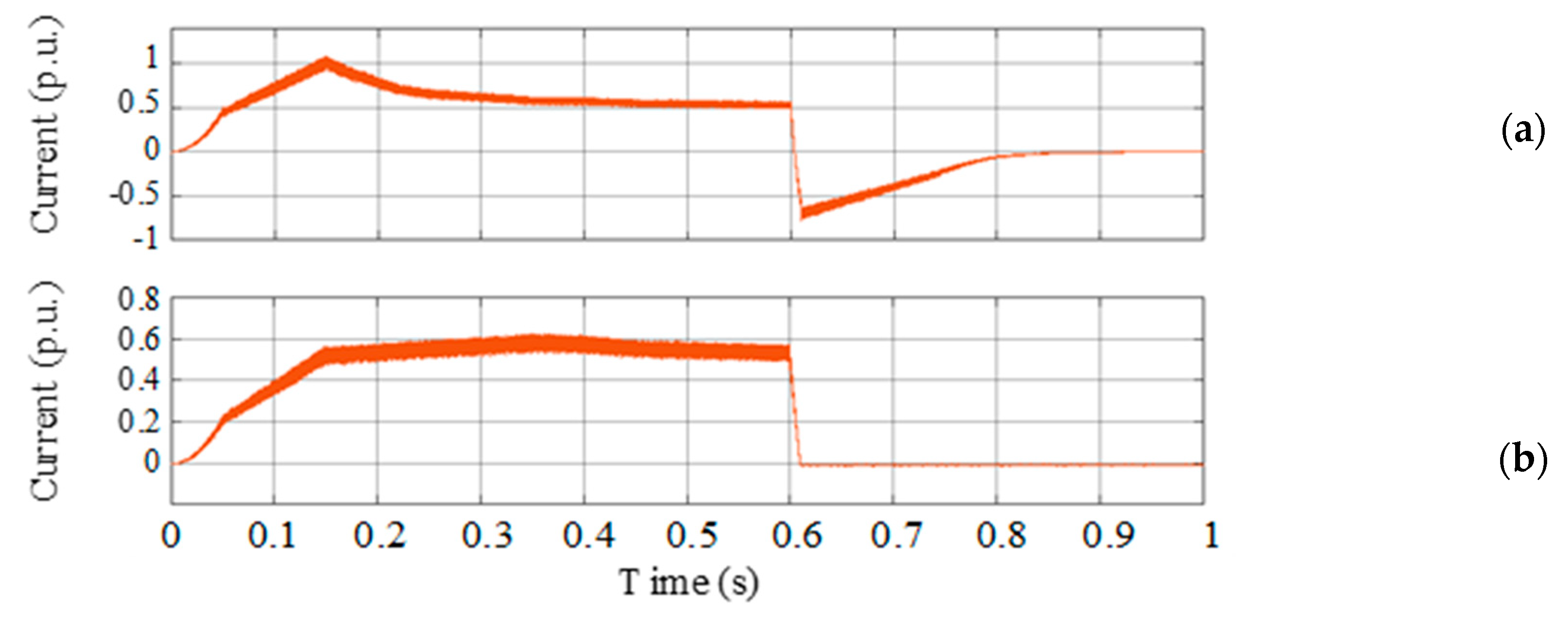
5.1. Proposed MMD Topology Validation
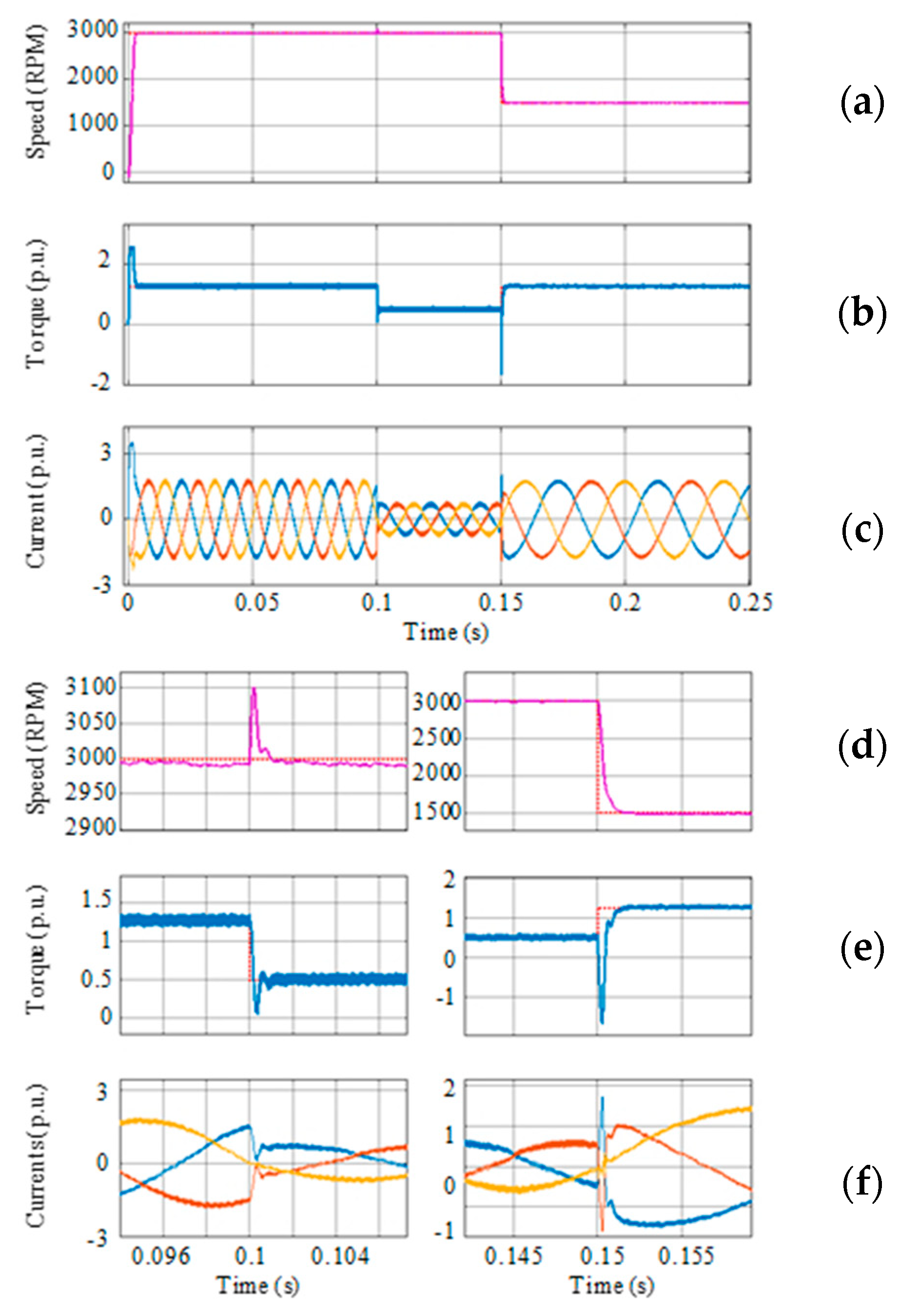
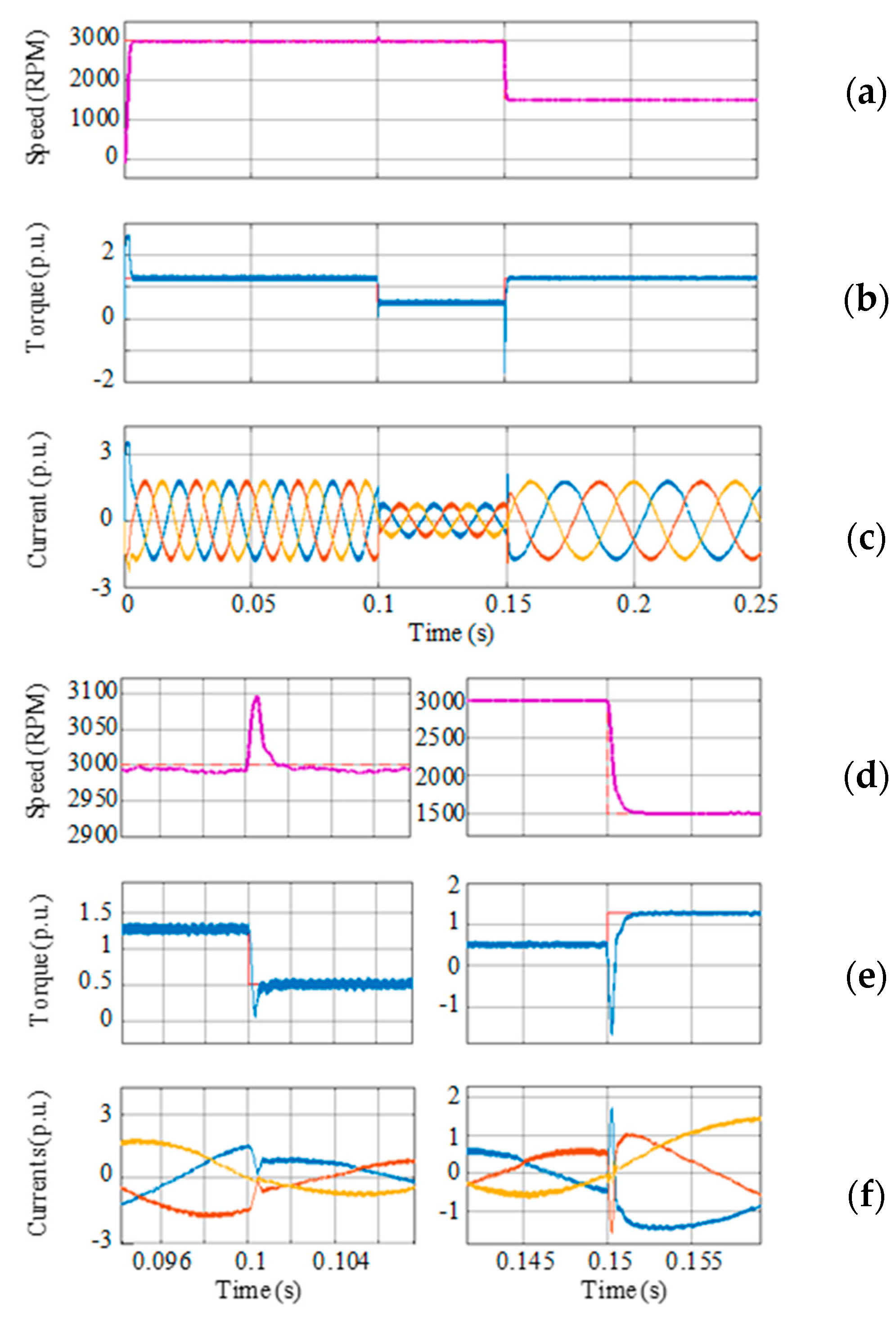
5.2. Control Dynamics Evaluation
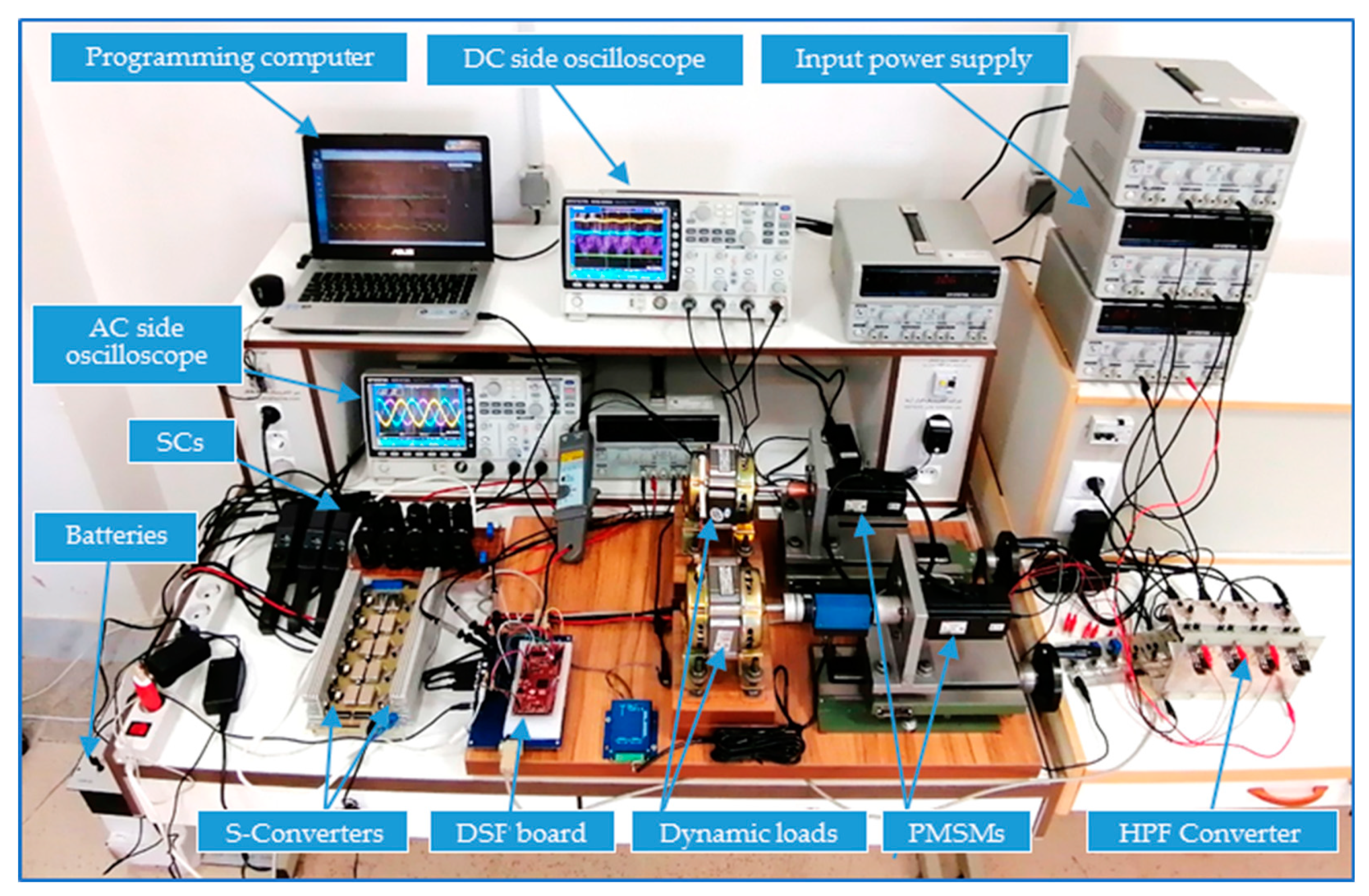
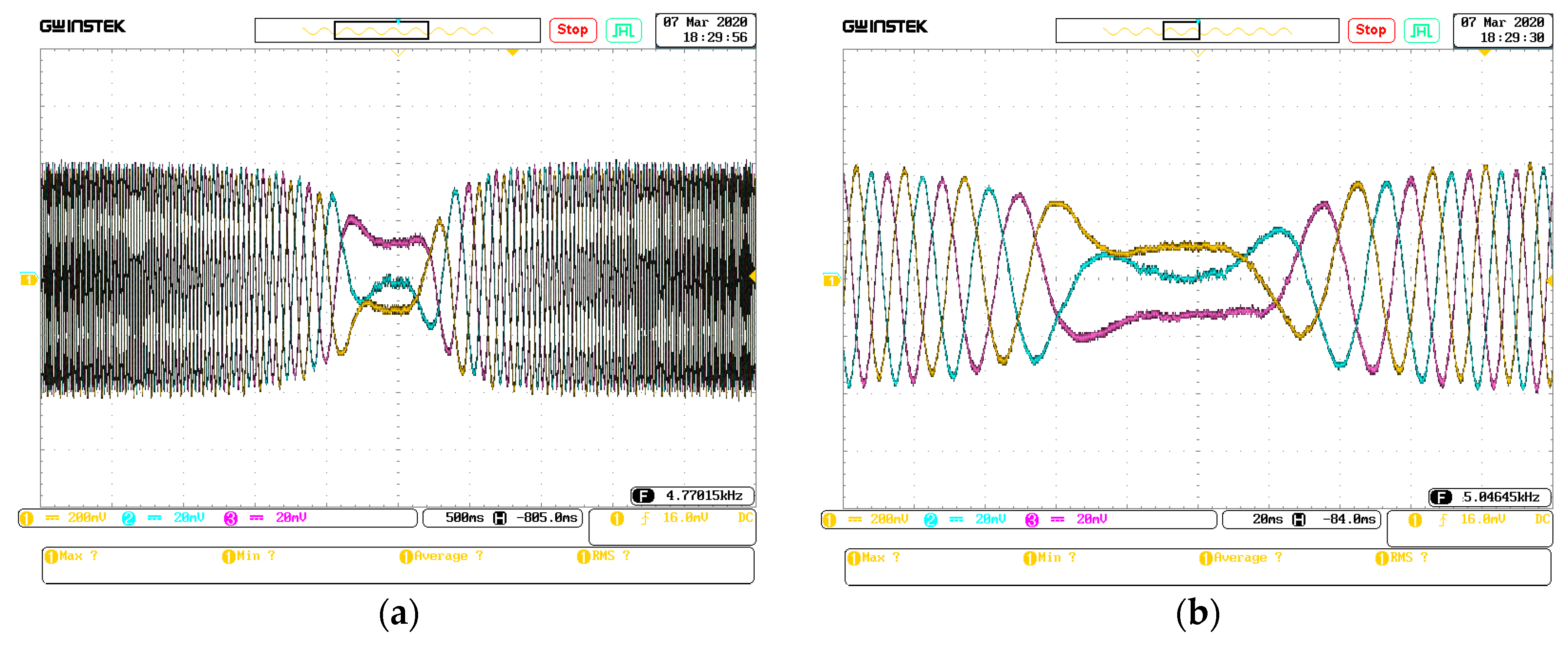
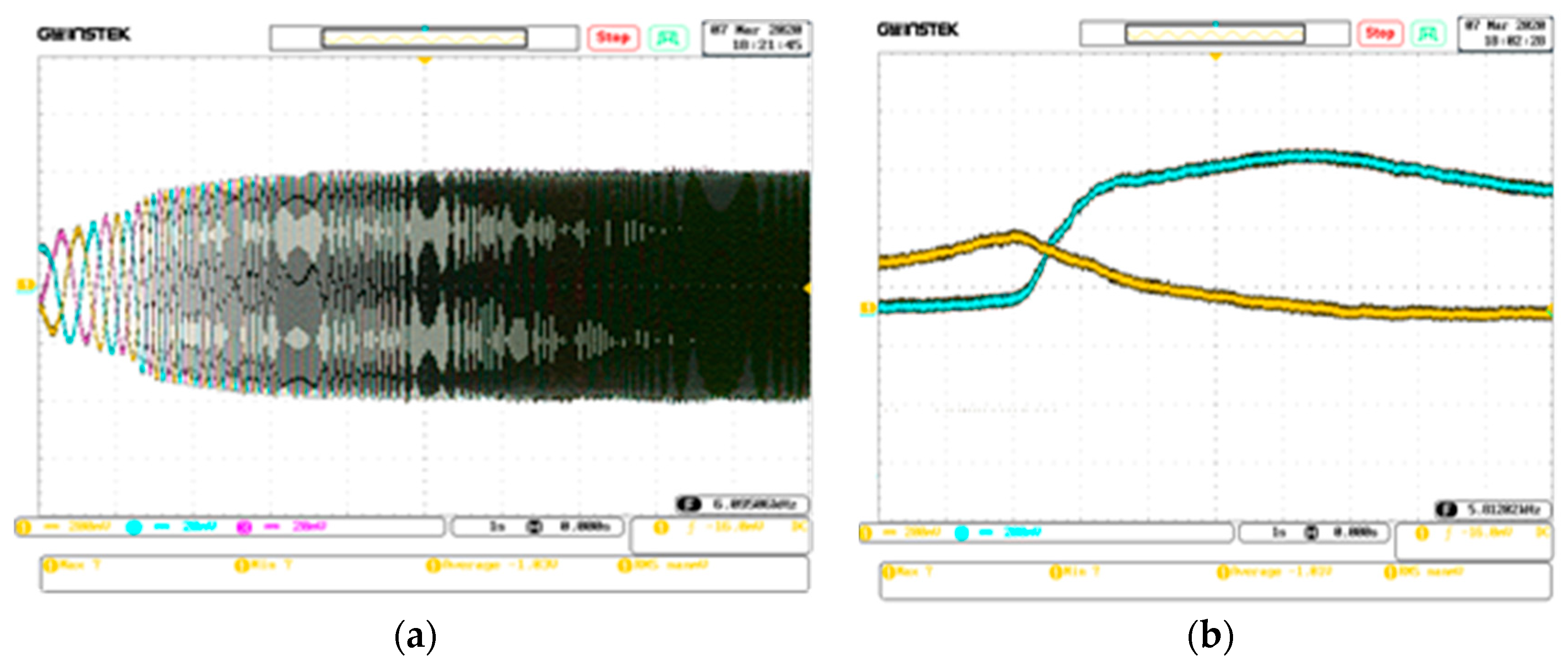
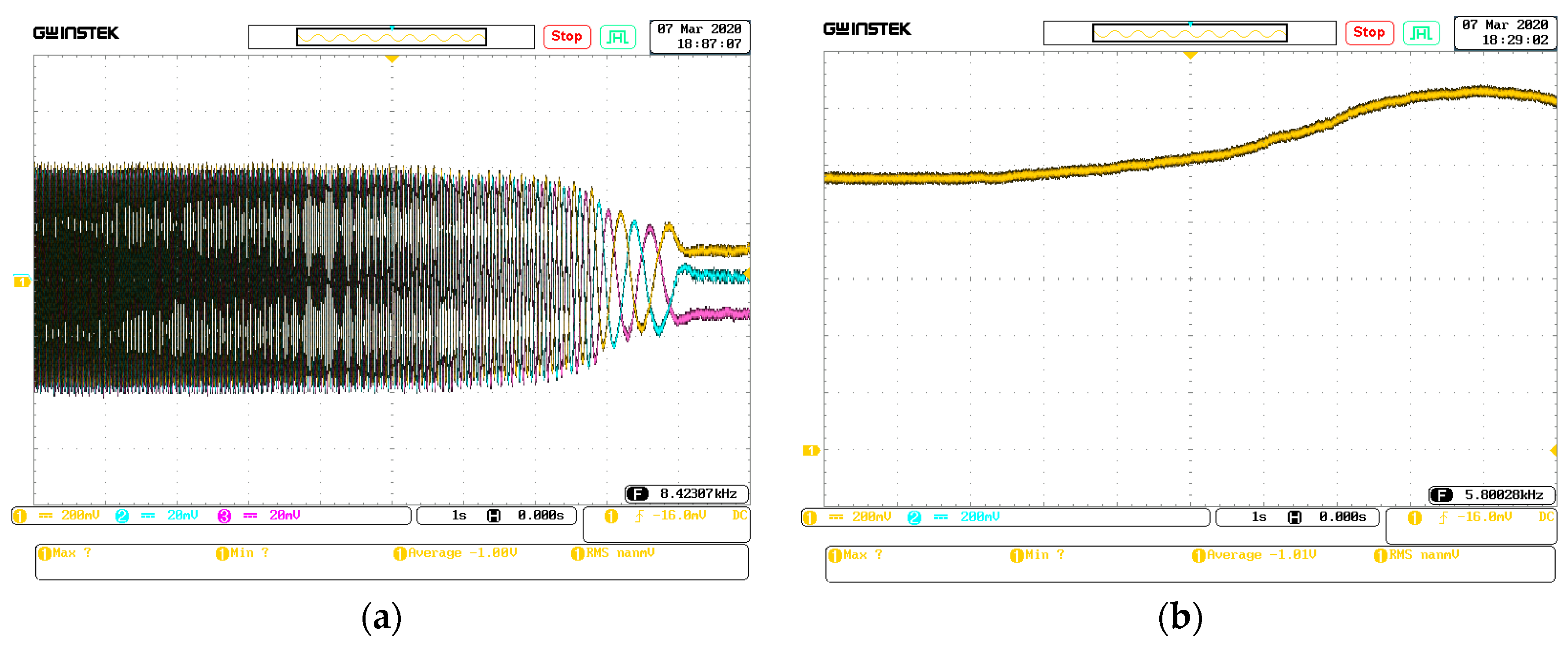
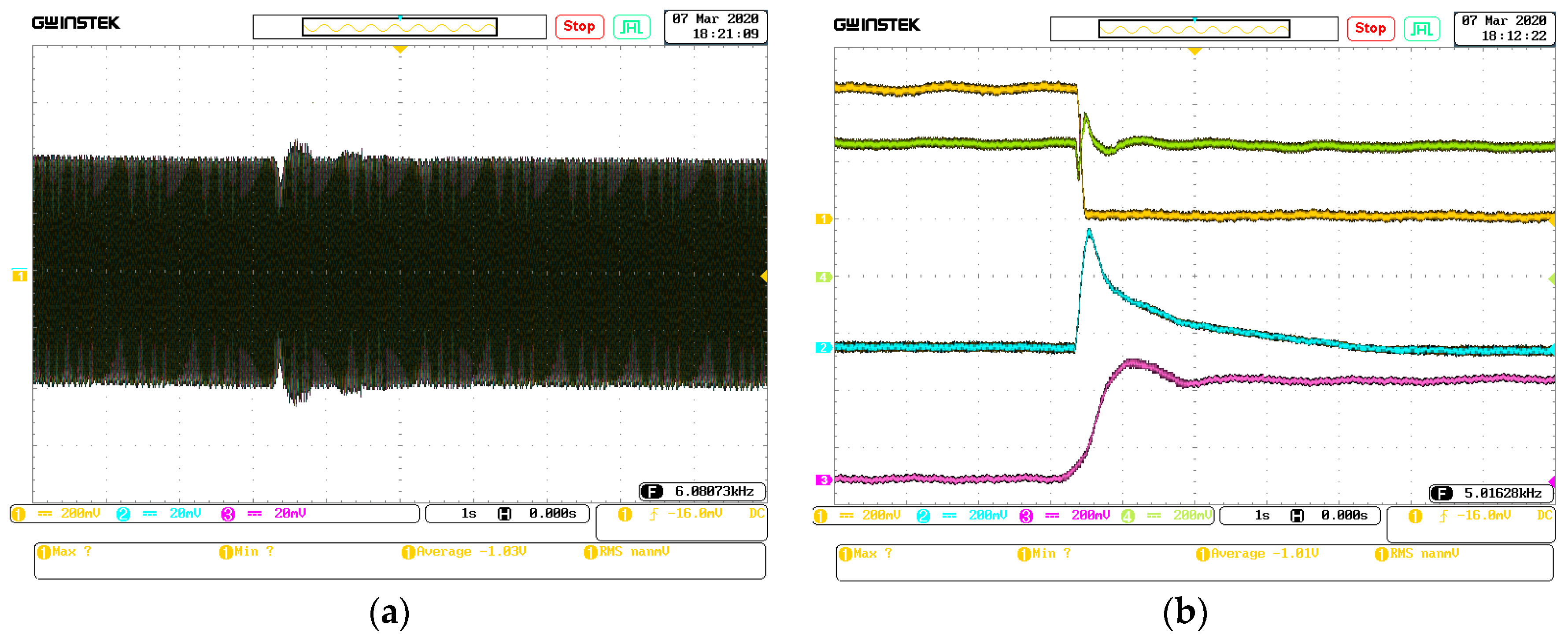
6. Experimental Setup
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
| Ac | Alternating Current |
| BDC | Bidirectional DC-DC Converter |
| DAB | Dual-Active-Bridge |
| DC | Direct Current |
| DEMU | Diesel-Electric Multiple Unit |
| ES | Energy Storage |
| ET | Electric Trains and Trams |
| F-Converter | Feeder Side Connected Converter |
| HPF | High-Power Feeder Side Connected |
| IM | Induction Machine |
| ISE | Integral Square Error |
| MMD | Multi-Machine Drive |
| MPC | Model Predictive Control |
| OEW | Open-End Winding |
| PMSM | Permanent Magnet Synchronous Machin |
| PWM | Pulse Width Modulation |
| SC | Super Capacitor |
| S-Converter | Storages side connected Converter |
| SMPC | Simple basic Model Predictive Control |
| SVM | Space Vector Modulation |
| SVR | Supercapacitors Voltage Regulator |
| THD | Total Harmonics Distortions |
| UPS | Uninterruptible Power Supplies |
| VD | Voltage Divider |
| VSI | Voltage Source Inverter |
Appendix B
- First, obtaining the linear state-space model for the desired system.
- Second, defining a performance index based on the purpose of the control system.
- Third, finding the Pontryagin H function based on the performance index and system model.
- Fourth, attaining the optimality requirements, in accordance with the Pontryagin maximum principle.
- Fifth, applying the forward Euler method to derivative approximation for the first-order equations obtained in Step 4.
- Sixth, adding boundary conditions to the obtained equations (in this case, it is assumed that and the terminal error in the next step will go to zero).
- Seventh, finding the predicted state variable and quasi-state variable vectors .
- Eighth, achieving offline equations of control signals, based on predicted state and quasi-state vectors.
References
- Pietrzak, K.; Pietrzak, O. Environmental Effects of Electromobility in a Sustainable Urban Public Transport. Sustainability 2020, 12, 1052. [Google Scholar] [CrossRef] [Green Version]
- Aguado, J.A.; Racero, A.J.; de la Torre, S. Optimal operation of electric railways with renewable energy and electric storage systems. IEEE Trans. Smart Grid 2016, 9, 993–1001. [Google Scholar] [CrossRef]
- Ceraolo, M.; Lutzemberger, G.; Meli, E.; Pugi, L.; Rindi, A.; Pancari, G. Energy storage systems to exploit regenerative braking in DC railway systems: Different approaches to improve efficiency of modern high-speed trains. J. Energy Storage 2018, 16, 269–279. [Google Scholar] [CrossRef]
- Van Dongen, L.A.; Frunt, L.; Martinetti, A. Smart Asset Management or Smart Operation Management? The Netherlands Railways Case. In Transportation Systems: Managing Performance through Advanced Maintenance Engineering, 1st ed.; Singh, S., Martinetti, A., Majumdar, A., van Dongen, L., Eds.; Springer (Asset Analytics): Singapore, 2019; pp. 113–132. [Google Scholar]
- Martinetti, A.; Braaksma, A.J.J.; van Dongen, L.A.M. Beyond RAMS Design: Towards an Integral Asset and Process Approach. In Advances in Through-Life Engineering Services, 1st ed.; Redding, L., Roy, R., Shaw, A., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 417–428. [Google Scholar]
- Haes Alhelou, H.; Hamedani-Golshan, M.E.; Njenda, T.C.; Siano, P. A Survey on Power System Blackout and Cascading Events: Research Motivations and Challenges. Energies 2019, 12, 682. [Google Scholar] [CrossRef] [Green Version]
- Sinha, P. Architectural design and reliability analysis of a fail-operational brake-by-wire system from ISO 26262 perspectives. Reliab. Eng. Syst. Saf. 2011, 96, 1349–1359. [Google Scholar] [CrossRef]
- Nagaura, Y.; Oishi, R.; Shimada, M.; Kaneko, T. Battery-powered drive systems: Latest technologies and outlook. Hitachi Rev. 2017, 66, 139. [Google Scholar]
- Meishner, F.; Sauer, D.U. Wayside Energy Recovery Systems in DC Urban Railway Grids. eTransportation 2019, 1, 100001. [Google Scholar] [CrossRef]
- Steiner, M.; Klohr, M.; Pagiela, S. Energy storage system with ultracaps on board of railway vehicles. In Proceedings of the 12th European Conference on Power Electronics and Applications, Aalborg, Denmark, 2 September 2007; pp. 1–10. [Google Scholar]
- Mayrink, S., Jr.; Oliveira, J.G.; Dias, B.H.; Oliveira, L.W.; Ochoa, J.S.; Rosseti, G.S. Regenerative Braking for Energy Recovering in Diesel-Electric Freight Trains: A Technical and Economic Evaluation. Energies 2020, 13, 963. [Google Scholar] [CrossRef] [Green Version]
- Radu, P.V.; Szelag, A.; Steczek, M. On-Board Energy Storage Devices with Supercapacitors for Metro Trains—Case Study Analysis of Application Effectiveness. Energies 2019, 12, 1291. [Google Scholar] [CrossRef] [Green Version]
- Khodaparastan, M.; Mohamed, A.A.; Brandauer, W. Recuperation of regenerative braking energy in electric rail transit systems. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2831–2847. [Google Scholar] [CrossRef] [Green Version]
- Yildirim, D.; Aksit, M.H.; Yolacan, C.; Pul, T.; Ermis, C.; Aghdam, B.H.; Cadirci, I.; Ermis, M. Full-Scale Physical Simulator of All SiC Traction Motor Drive with On-Board Supercapacitor ESS for Light-Rail Public Transportation. IEEE Trans. Ind. Electron. 2019, 67, 6290–6301. [Google Scholar] [CrossRef]
- Makdisie, C.J.; Mariam, M.F. Applied Power Electronics: Inverters, UPSs. In Handbook of Research on New Solutions and Technologies in Electrical Distribution Networks; IGI Global: Hershey, PA, USA, 2020; pp. 322–361. [Google Scholar]
- Lee, Y.; Ha, J.I. Control method of mono-inverter dual parallel drive system with interior permanent magnet synchronous machines. IEEE Trans. Power Electron. 2015, 31, 7077–7086. [Google Scholar]
- Bolvashenkov, I.; Herzog, H.G.; Ismagilov, F.; Vavilov, V.; Khvatskin, L.; Frenkel, I.; Lisnianski, A. Reliability and Fault Tolerance Assessment of Multi-motor Electric Drives with Multi-phase Traction Motors. In Fault-Tolerant Traction Electric Drives; Springer: Singapore, 2020; pp. 1–24. [Google Scholar]
- Brando, G.; Piegari, L.; Spina, I. Simplified Optimum Control Method for Mono-inverter Dual Parallel PMSM Drive. IEEE Trans. Ind. Electron. 2017, 65, 3763–3771. [Google Scholar] [CrossRef]
- Nagano, T.; Itoh, J.C. Parallel Connected Multiple Drive System using Small Auxiliary Inverter for Numbers of PMSMs. In Proceedings of the International Power Electronics Conference (IPEC), Hiroshima, Japan, 18–21 May 2014; pp. 1253–1260. [Google Scholar]
- Yuan, X.; Zhang, C.; Zhang, S. A novel Deadbeat Predictive Current Control Scheme for OEW-PMSM Drives. IEEE Trans. Power Electron. 2019, 34, 11990–12000. [Google Scholar] [CrossRef]
- Lee, Y.; Ha, J.I. Hybrid modulation of dual inverter for open-end permanent magnet synchronous motor. IEEE Trans. Power Electron. 2014, 30, 3286–3299. [Google Scholar] [CrossRef]
- Attaianese, C.; D’Arpino, M.; Di Monaco, M.; Tomasso, G. Multi Inverter Electrical Drive for Double Motor Electric Vehicles. In Proceedings of the International Electric Vehicle Conference, Greenville, SC, USA, 4–8 March 2012; pp. 1–8. [Google Scholar]
- Torrent, M.; Perat, J.I.; Jiménez, J.A. Permanent Magnet Synchronous Motor with Different Rotor Structures for Traction Motor in High Speed Trains. Energies 2018, 11, 1549. [Google Scholar] [CrossRef] [Green Version]
- Du, M.; Tian, Y.; Wang, W.; Ouyang, Z.; Wei, K. A Novel Finite-Control-Set Model Predictive Directive Torque Control Strategy of Permanent Magnet Synchronous Motor with Extended Output. Electronics 2019, 8, 388. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Zhang, Z.; Garcia, C.; Rodríguez, J.; Huang, W.; Kennel, R. Discussion on control methods with finite-control-set concept for PMSM drives. In Proceedings of the International Electric Machines & Drives Conference (IEMDC), San Diego, CA, USA, 12–15 March 2019. [Google Scholar]
- Vafaie, M.H. Performance Improvement of Permanent-Magnet Synchronous Motor through a New Online Predictive Controller. IEEE Trans. Energy Convers. 2019, 34, 2258–2266. [Google Scholar] [CrossRef]
- Liu, H.; Li, S. Speed control for PMSM servo system using predictive functional control and extended state observer. IEEE Trans. Ind. Electron. 2011, 59, 1171–1183. [Google Scholar] [CrossRef]
- Li, L.B.; Sun, H.X.; Chu, J.D.; Wang, G.L. The predictive control of PMSM based on state space. In Proceedings of the International Conference on Machine Learning and Cybernetics, Xi’an, China, 5 November 2003; Volume 2, pp. 859–862. [Google Scholar]
- Chai, S.; Wang, L.; Rogers, E. Model predictive control of a permanent magnet synchronous motor. In Proceedings of the 37th Annual Conference of the IEEE Industrial Electronics Society (IECON), Melbourne, Australia, 7–10 November 2011; pp. 1928–1933. [Google Scholar]
- Chai, S.; Wang, L.; Rogers, E. Model predictive control of a permanent magnet synchronous motor with experimental validation. Control Eng. Pract. 2013, 21, 1584–1593. [Google Scholar] [CrossRef]
- Bemporad, A.; Morari, M.; Dua, V.; Pistikopoulos, E.N. The explicit linear quadratic regulator for constrained systems. Automatica 2002, 38, 3–20. [Google Scholar] [CrossRef]
- Bolognani, S.; Bolognani, S.; Peretti, L.; Zigliotto, M. Design and implementation of model predictive control for electrical motor drives. IEEE Trans. Ind. Electron. 2008, 56, 1925–1936. [Google Scholar] [CrossRef]
- Chai, S.; Wang, L.; Rogers, E. A cascade MPC control structure for a PMSM with speed ripple minimization. IEEE Trans. Ind. Electron. 2012, 60, 2978–2987. [Google Scholar] [CrossRef] [Green Version]
- Tøndel, P.; Johansen, T.A.; Bemporad, A. Evaluation of piecewise affine control via binary search tree. Automatica 2003, 39, 945–950. [Google Scholar] [CrossRef] [Green Version]
- Pirouz, H.M.; Bina, M. A transformerless medium-voltage STATCOM topology based on extended modular multilevel converters. IEEE Trans. Power Electron. 2010, 26, 1534–1545. [Google Scholar]
- Zhan, H.; Zhu, Z.Q.; Odavic, M. Analysis and suppression of zero sequence circulating current in open winding PMSM drives with common DC bus. IEEE Trans. Ind. Appl. 2017, 53, 3609–3620. [Google Scholar] [CrossRef]
- Di Cairano, S.; Bemporad, A. Model predictive control tuning by controller matching. IEEE Trans. Autom. Control 2009, 55, 185–190. [Google Scholar] [CrossRef]
- Saerens, B.; Diehl, M.; Van den Bulck, E. Optimal control using Pontryagin’s maximum principle and dynamic programming. In Automotive Model Predictive Control; Springer: London, UK, 2010; pp. 119–138. [Google Scholar]
- Xu, Y.; Shi, T.; Yan, Y.; Gu, X. Dual-Vector Predictive Torque Control of Permanent Magnet Synchronous Motors Based on a Candidate Vector Table. Energies 2019, 12, 163. [Google Scholar] [CrossRef] [Green Version]
- Liu, K.; Zhu, Z.Q. Mechanical parameter estimation of permanent-magnet synchronous machines with aiding from estimation of rotor PM flux linkage. IEEE Trans. Ind. Appl. 2015, 51, 3115–3125. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Machine Parameters | Value |
|---|---|---|
| rated power | 400 Watt | |
| rated current | 2.89 A | |
| number of poles | ||
| stator resistance in phase | 0.82 | |
| stator inductances | 3.66 mH | |
| permanent magnet magnetic flux | 0.0734 wb | |
| rated speed | 3000 RPM | |
| rated torque | 1.27 N⋅m | |
| maximum instantaneous torque | 3.82 N⋅m | |
| moment of inertia | 321 Kg. | |
| friction coefficient | N⋅m.s |
| Symbol | Machine Parameters | Value |
|---|---|---|
| DC side voltage | 173 V | |
| switching frequency | 5 KHz | |
| on-mode resistance of switches | 0.019 Ω |
| Speed | Proposed MPC | SMPC |
|---|---|---|
| 1500 RPM | THD = 1.88 | THD = 1.9 |
| ISE = 0.0056 | ISE = 0.155 | |
| 3000 RPM | THD = 1.9 | THD = 1.9 |
| ISE = 0.0598 | ISE = 0.0612 |
| Symbol | Parameters | Value |
|---|---|---|
| input feeder voltage | 173 V | |
| common DC-link voltage | 170 V | |
| and | SCs voltage variations | 90 V to 250 V |
| battery bank terminal voltage | 85 V | |
| and | BDC and SVR inductors | 1.3 m.H |
| switching frequency | 5 KHz |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammadi Pirouz, H.; Hajizadeh, A. A Highly Reliable Propulsion System with Onboard Uninterruptible Power Supply for Train Application: Topology and Control. Sustainability 2020, 12, 3943. https://0-doi-org.brum.beds.ac.uk/10.3390/su12103943
Mohammadi Pirouz H, Hajizadeh A. A Highly Reliable Propulsion System with Onboard Uninterruptible Power Supply for Train Application: Topology and Control. Sustainability. 2020; 12(10):3943. https://0-doi-org.brum.beds.ac.uk/10.3390/su12103943
Chicago/Turabian StyleMohammadi Pirouz, Hassan, and Amin Hajizadeh. 2020. "A Highly Reliable Propulsion System with Onboard Uninterruptible Power Supply for Train Application: Topology and Control" Sustainability 12, no. 10: 3943. https://0-doi-org.brum.beds.ac.uk/10.3390/su12103943