Surrogate Safety Measures from Traffic Simulation: Validation of Safety Indicators with Intersection Traffic Crash Data





Abstract
:1. Introduction
1.1. Literature Review on Traffic Safety Estimation
- Time to collision (TTC), which is the measure of the interval between two vehicles that will collide, if they keep their present trajectory. When vehicles are moving the value of this indicator can change so the significant value for the risk of one conflict is assumed as the minimum time to collision considering the evolution of TTC over time.
- Post-encroachment time (PET) is generally defined for two vehicles that are following each other in the same direction as the interval between the instant when a leader vehicle is moving on a determinate road space and the instant when a follower vehicle occupies the same road space in Allen et al. [40].
- Deceleration required for avoiding a crash (DRAC), which is the maximum deceleration rate that has to be applied to prevent a crash, this value is calculated with this expression:
1.2. Some Authors’ Concerns in the Use of Classical Surrogate Safety-Measures
- Human factor modelling.
- Traffic simulation packages.
- Traffic safety indicators.
- Effects of friction and shear forces in traffic flows.
1.3. Human Factor Modelling
1.4. Traffic Simulation Packages
1.5. Traffic Safety Indicators
1.6. Effects of Friction and Shear Forces in Traffic Flows
1.7. Possible Solutions and Contribution of This Paper
2. Materials and Methods
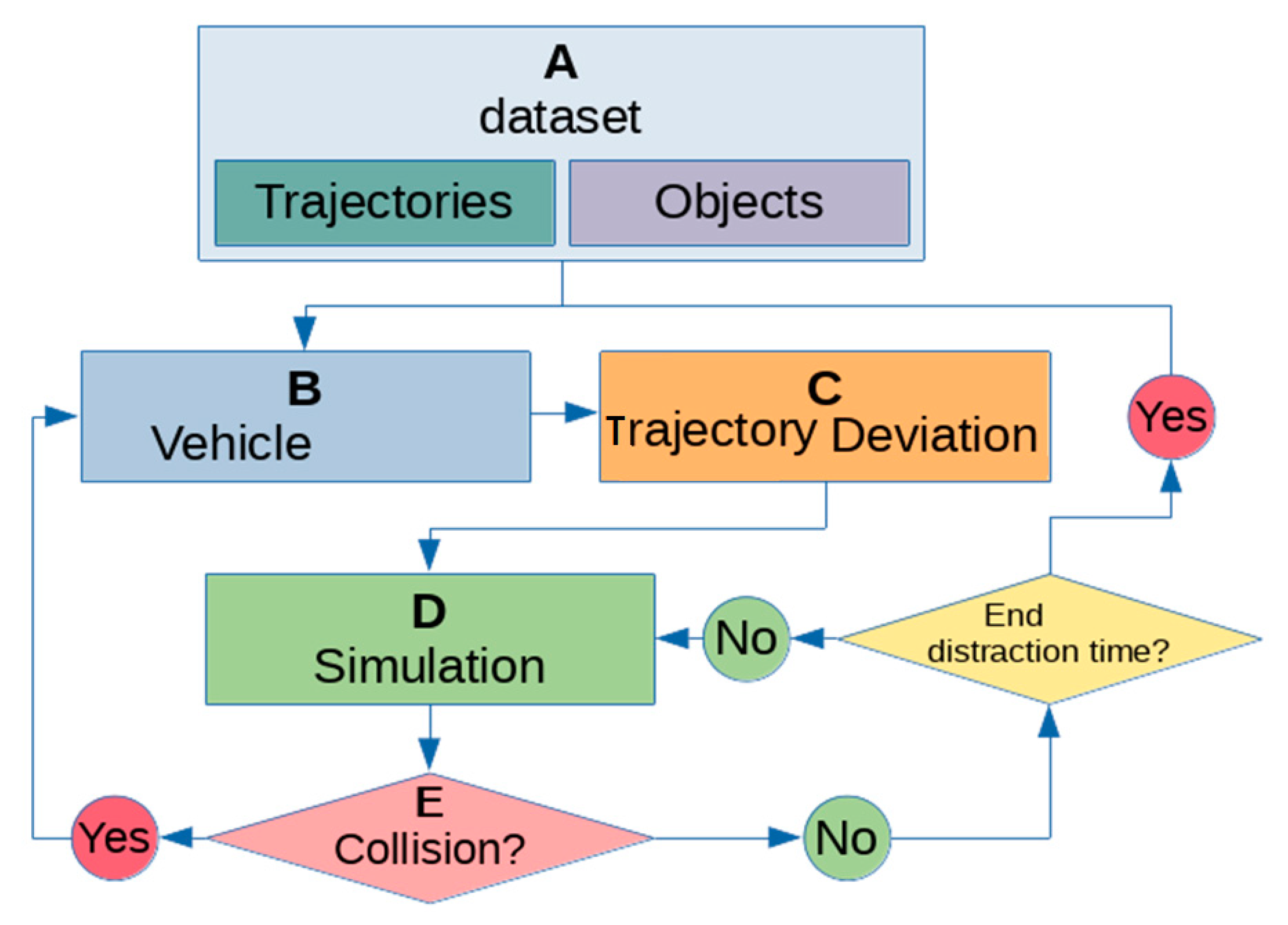
- This is the starting data set: The set of trajectories for a given time period in a defined traffic network in a road scenario.
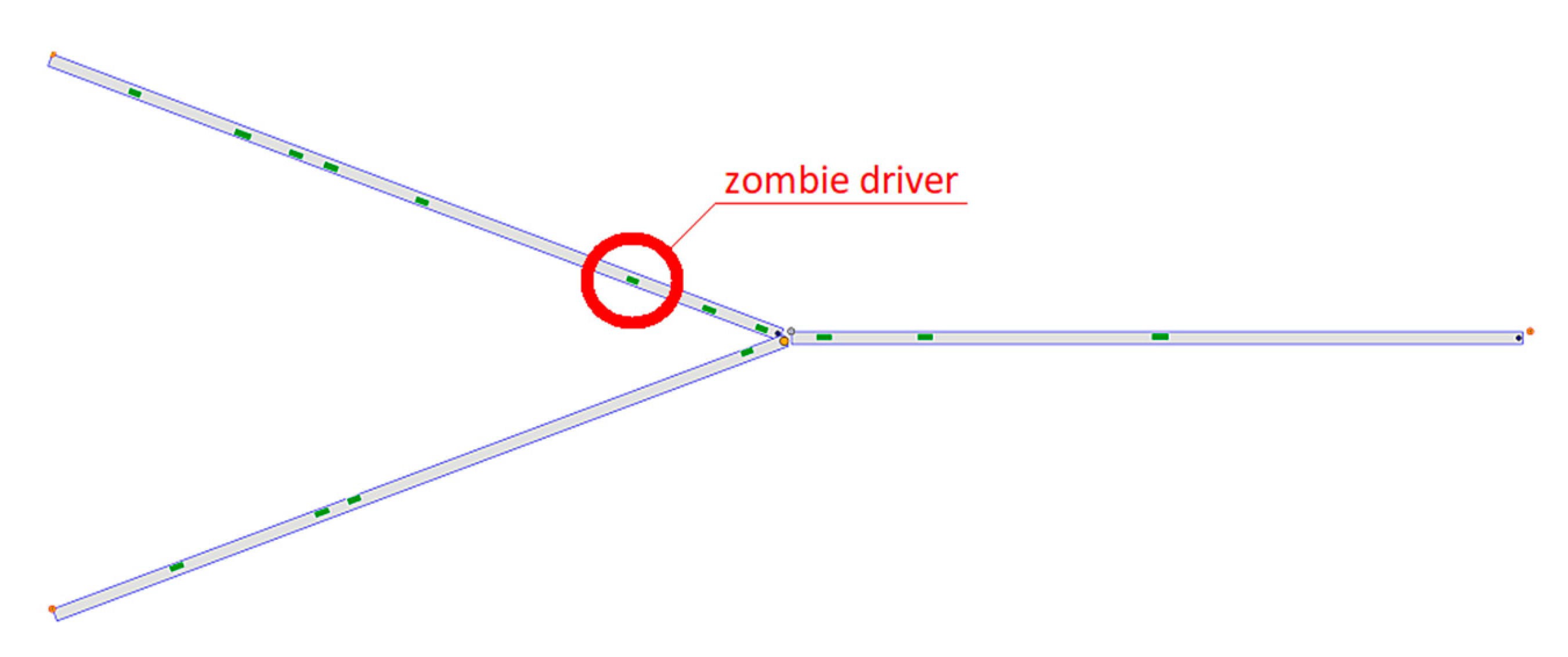
- Zombie (or bullet) vehicle choice: According to a random law (or deterministic procedure) a travelling vehicle position in a defined instant of time t is extracted from the traffic network; x being the chosen zombie vehicle (Figure 2) and p(x,t) the position at time t. The speed s(x,t) of vehicle x at time t is also known (as a bi-dimensional vector). All calculations in this paper are based on a deterministic procedure: Every vehicle is considered, every second of the simulation, for a deviated trajectory, and in this way a great number of potential crashes is generated.
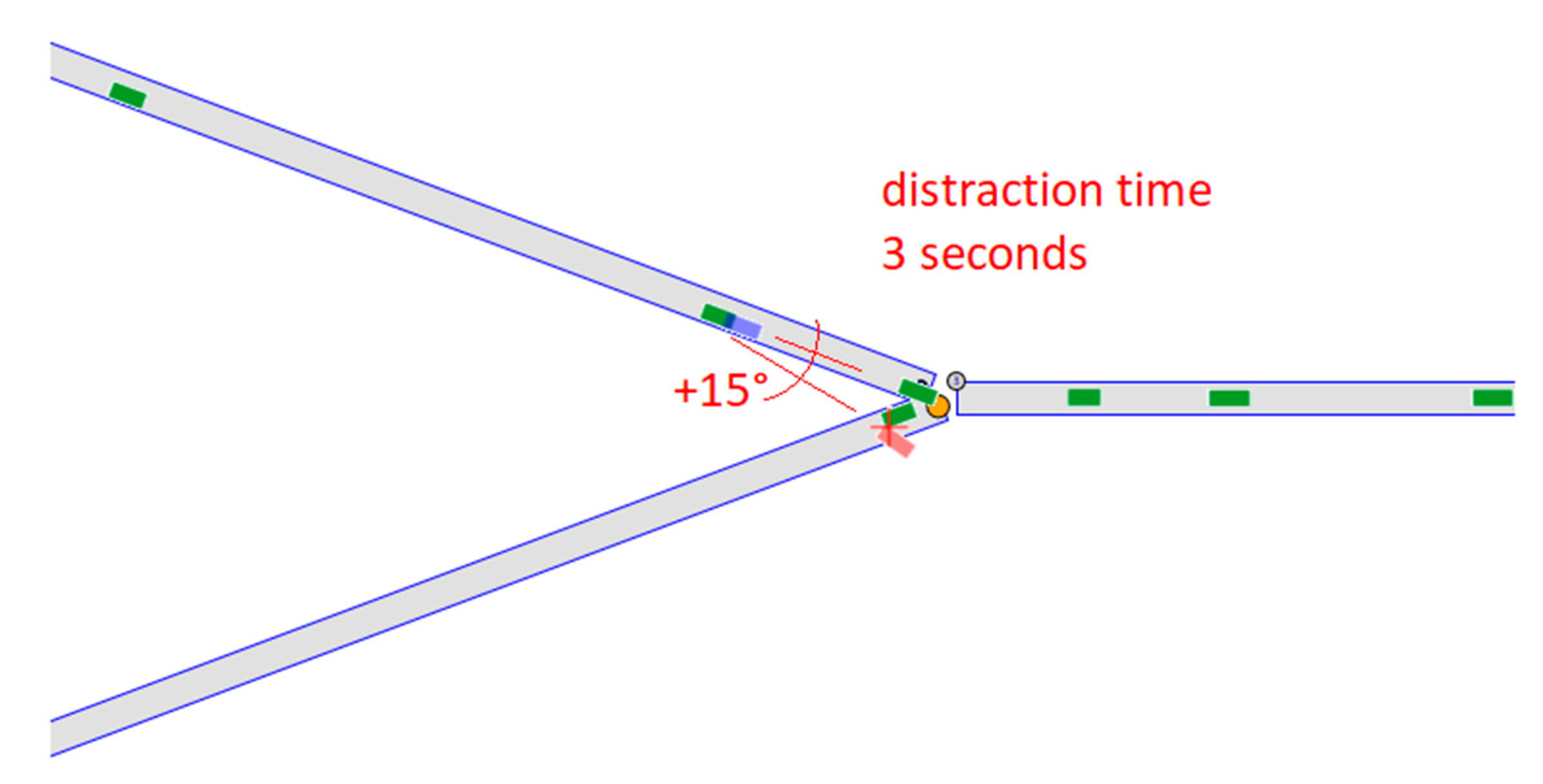
- Deviation of trajectory: The choice of a deviated trajectory in case of a driver error, driver distraction, or a mechanical failure is an open research field. With this model we would like to replicate all kinds of human mistakes a driver could possibly commit. This is not a simple task given the lack of an established probability distribution for driver mistakes. For this reason and in order to implement the first applications of our trajectory perturbation based model, we assumed a certain basic unsophisticated hypothesis, namely that the deviated trajectory follows a straight path at a constant speed which is equal to the speed of the vehicle before the deviation. The laws of momentum in physics suggest that this could be the more likely event in case the driver or the vehicle fails to perform in a normal way. Moreover, the application of a curved deviated trajectory corresponds to a straight trajectory at a certain (variable in time) angle. For this reason, an arrangement was contrived also to introduce the possibility of a certain angle between the deviated trajectory and the original correct trajectory.
- D.
- Simulation of the deviated trajectory: With start at time t, the vehicle x is simulated as moving on the deviated trajectory for the next DT seconds.
- E.
- Potential collisions: When the deviated trajectory of a zombie vehicle brings the vehicle to collide with another vehicle (Figure 4) (it is important to note that in our first implementation all other vehicles are considered as moving on the original trajectories and cannot perform evasive maneuvers) or a road-side object, a potential collision is calculated by assessing the severity of the crash in terms of impact energy or with any other indicator.
- The methodology considers human error and can give a methodological explanation of why some kinds of crashes occurs in the field (e.g., single vehicle crashes which are not considered in classical surrogate safety performance indicators). The general assumption that “proximity” of vehicles is dangerous is maintained, and near-crash events are replaced with “potential crashes.”
- With the Zombie Driver software, the micro simulators can be used to evaluate the level of safety also in the presence of road-side objects. In this respect, in the procedure, the set of vehicle trajectories is required, and other additional information such as the location, geometrical shape, and elasticity coefficient of road-side objects and barriers.
- Since Zombie Driver explicitly simulates potential crashes, it is possible to evaluate the exact crash dynamic in terms of impact energy and the probability of having injuries and deaths.
- It allows one to consider conflicts between vehicles that are travelling on close dangerous trajectories that do not overlap.
- The maximum distraction time: The time frame in which a driver is distracted and during which a collision with another vehicle or an obstacle may (or may not) occur. In our calculations we assumed deviated trajectories of 5 s.
- The distraction angle: The angle that will be given to two new lateral trajectories (considering that a third straight trajectory is always projected with an angle equal to 0 °). Currently this angle is set as a deterministic variable, but in the future it can be generated according to a Gaussian distribution with known mean and standard deviation.
- The minimum energy threshold: As a standard, this parameter is equal to zero in order to take into account all the collisions, but it is possible to modify it in order to consider only the more dangerous collisions that produce at least a fixed energy level.
- Size of the grid: One of the most useful outputs of Zombie Driver is the risk map. The risk maps are drawn by using a grid that is superimposed over the maps, and in which the risk areas are identified by using a chromatic scale. This parameter represents the size of the discretization of the study area, and therefore the mesh size of the grid. The standard size of the grid we have used in this work is 5 m (square cells). The calculation of intersection indicators has been performed by manually defining the intersection area with a set of square cells belonging to the 5 m defined grid.
- The zombie driver frequency: The frequency according to which a driver will commit a driving “error” moving on a deviated trajectory—in all calculations performed in this work, as already stated, we considered every vehicle, every second of the simulation as moving on three deviated trajectories.
- Collision energy means average energy (Ea), total energy (Et), and maximum energy (Em), detected from potential collisions on the network. It can be generated either by collisions between vehicles only or between vehicles and objects (e.g., trees, walls, etc.) and is divided into:General—Based on all the crashes detected on the road network under study.Single—For single vehicle, distinguished between the part of energy absorbed by the “zombie” vehicle carrying out the crash and the ones who suffer it. This is calculated also for single vehicle crashes and according to the collided object: Vehicle–vehicle collisions, vehicle–rigid objects, and vehicle–elastic objects.
- Difference between vehicle speed vectors (Delta-V), average (dVa), total (dVt), and maximum (dVm). This represents the module of the vector difference between the two vehicles’ speed vectors during a collision.
- Index of collision severity, average (Ga), total (Gt), and maximum (Gm). This is the ratio between the energy that is generated during the collision and the time of distraction necessary for the event.
- Number of collisions, total (Ct) or per angle. These are the number of collisions that occurred during the analysis of the network, and they can also be differentiated according to the angle of the deviated trajectory.
- Distraction time, average (Ta) or per angle. This represents the average time that a “zombie” vehicle was driving on a deviated trajectory before being involved in a collision.
- Number of deaths, with (Dy) or without (Dn) safety belt. This is the sum of the probabilities of having or not having a dead person during a collision depending on the value of the difference between vehicle speed vectors.
- Number of injured, with (Iy) or without (In) safety belt. This is the sum of the probabilities of having or not having an injured person during a collision, depending on the value of the difference between vehicle speed vectors.
3. Results
3.1. Micro-Simulation Calibration
3.2. Analysis of Simulation Results
4. Statistical Modelling
4.1. Literature Review on Random-Parameter Models
4.2. Methodology
4.3. Procedure for Choosing the Statistically More Significant Variables and Models’ Comparison
5. Discussion and Analysis of Results
6. Summary and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Marzano, V.; Tocchi, D.; Papola, A.; Aponte, D.; Simonelli, F.; Cascetta, E. Incentives to freight railway undertakings compensating for infrastructural gaps: Methodology and practical application to Italy. Transp. Res. Part A Policy Pract. 2018. [Google Scholar] [CrossRef]
- Astarita, V.; Florian, M.; Musolino, G. A microscopic traffic simulation model for the evaluation of toll station systems. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Oakland, CA, USA, 25–29 August 2001. [Google Scholar]
- Astarita, V.; Giofré, V.; Guido, G.; Vitale, A. Investigating road safety issues through a microsimulation model. Procedia -Soc. Behav. Sci. 2011, 20, 226–235. [Google Scholar] [CrossRef] [Green Version]
- Young, W.; Sobhani, A.; Lenné, M.G.; Sarvi, M. Simulation of safety: A review of the state of the art in road safety simulation modelling. Accid. Anal. Prev. 2014. [Google Scholar] [CrossRef] [PubMed]
- Astarita, V.; Giofré, V.P. From traffic conflict simulation to traffic crash simulation: Introducing traffic safety indicators based on the explicit simulation of potential driver errors. Simul. Model. Pr. Theory 2019, 94, 215–236. [Google Scholar] [CrossRef]
- Osorio, C.; Punzo, V. Efficient calibration of microscopic car-following models for large-scale stochastic network simulators. Transp. Res. Part B Methodol. 2019. [Google Scholar] [CrossRef]
- Martinez, F.J.; Toh, C.K.; Cano, J.C.; Calafate, C.T.; Manzoni, P. A survey and comparative study of simulators for vehicular ad hoc networks (VANETs). Wirel. Commun. Mob. Comput. 2011. [Google Scholar] [CrossRef]
- Gentile, G. New formulations of the stochastic user equilibrium with logit route choice as an extension of the deterministic model. Transp. Sci. 2018. [Google Scholar] [CrossRef]
- Cantarella, G.E.; Di Febbraro, A.; Di Gangi, M.; Giannattasio, O. Stochastic Multi-Vehicle Assignment to Urban Transportation Networks. In Proceedings of the MT-ITS 2019—6th International Conference on Models and Technologies for Intelligent Transportation Systems, Cracow, Poland, 5–7 June 2019. [Google Scholar]
- Cantarella, G.E.; Watling, D.P. A general stochastic process for day-to-day dynamic traffic assignment: Formulation, asymptotic behaviour, and stability analysis. Transp. Res. Part B Methodol. 2016. [Google Scholar] [CrossRef]
- Trozzi, V.; Gentile, G.; Kaparias, I.; Bell, M.G.H. Effects of Countdown Displays in Public Transport Route Choice Under Severe Overcrowding. Networks Spat. Econ. 2015. [Google Scholar] [CrossRef] [Green Version]
- Kucharski, R.; Gentile, G. Simulation of rerouting phenomena in Dynamic Traffic Assignment with the Information Comply Model. Transp. Res. Part B Methodol. 2018. [Google Scholar] [CrossRef]
- Marzano, V.; Papola, A.; Simonelli, F.; Papageorgiou, M. A Kalman Filter for Quasi-Dynamic o-d Flow Estimation/Updating. IEEE Trans. Intell. Transp. Syst. 2018. [Google Scholar] [CrossRef]
- Papola, A.; Tinessa, F.; Marzano, V. Application of the Combination of Random Utility Models (CoRUM) to route choice. Transp. Res. Part B Methodol. 2018. [Google Scholar] [CrossRef]
- Papola, A. A new random utility model with flexible correlation pattern and closed-form covariance expression: The CoRUM. Transp. Res. Part B Methodol. 2016. [Google Scholar] [CrossRef]
- Hauer, E. On the estimation of the expected number of accidents. Accid. Anal. Prev. 1986. [Google Scholar] [CrossRef]
- Miaou, S.P.; Lum, H. Modeling vehicle accidents and highway geometric design relationships. Accid. Anal. Prev. 1993. [Google Scholar] [CrossRef]
- Caliendo, C.; De Guglielmo, M.L.; Russo, I. Analysis of crash frequency in motorway tunnels based on a correlated random-parameters approach. Tunn. Undergr. Space Technol. 2019. [Google Scholar] [CrossRef]
- Miaou, S.P. The relationship between truck accidents and geometric design of road sections: Poisson versus negative binomial regressions. Accid. Anal. Prev. 1994. [Google Scholar] [CrossRef] [Green Version]
- Shankar, V.; Mannering, F.; Barfield, W. Effect of roadway geometrics and environmental factors on rural freeway accident frequencies. Accid. Anal. Prev. 1995. [Google Scholar] [CrossRef]
- Hauer, E. Observational before—After Studies in Road Safety: Estimating the Effect of Highway and Traffic Engineering Measures on Road Safety; Pergamon: Bergama, Turkey, 1997; ISBN 9780080430539. [Google Scholar]
- Abdel-Aty, M.A.; Radwan, A.E. Modeling traffic accident occurrence and involvement. Accid. Anal. Prev. 2000. [Google Scholar] [CrossRef]
- Yan, X.; Radwan, E.; Abdel-Aty, M. Characteristics of rear-end accidents at signalized intersections using multiple logistic regression model. Accid. Anal. Prev. 2005, 37, 983–995. [Google Scholar] [CrossRef] [PubMed]
- Caliendo, C.; Guida, M.; Parisi, A. A crash-prediction model for multilane roads. Accid. Anal. Prev. 2007. [Google Scholar] [CrossRef] [PubMed]
- Caliendo, C.; Guida, M. A New Bivariate Regression Model for the Simultaneous Analysis of Total and Severe Crashes Occurrence. J. Transp. Saf. Secur. 2014. [Google Scholar] [CrossRef]
- Caliendo, C.; De Guglielmo, M.L.; Guida, M. Comparison and analysis of road tunnel traffic accident frequencies and rates using random-parameter models. J. Transp. Saf. Secur. 2016. [Google Scholar] [CrossRef]
- Hydén, C.; Linderhonm, L. The Swedish Traffic Conflicts Technique. In International Calibration Study of Traffic Conflict Techniques; Asmussen, E., Ed.; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Hyden, C. The Development of a Method for Traffic Safety Evaluation: The Swedish Traffic Conflicts Technique. Ph.D. Thesis, Lund Institute of Technology, Lund, Sweden, 1987. [Google Scholar]
- Perkins, S.R.; Harris, J.L. Traffic conflict characteristics-accident potential at intersections. In Traffic Safety and Accident Research -Highway Research Record 225; Highway Research Board: Washington, DC, USA, 1968. [Google Scholar]
- Baker, W.T. An evaluation of the traffic conflicts technique. Highw. Res. Rec. 1972, 384, 1–8. [Google Scholar]
- Oh, C.; Kim, T. Estimation of rear-end crash potential using vehicle trajectory data. Accid. Anal. Prev. 2010. [Google Scholar] [CrossRef]
- Guido, G.; Vitale, A.; Gallelli, V.; Figliomeni, G. Level of Safety on Two-Lane Undivided Rural Highways; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2013; Volume 253, ISBN 9783037855645. [Google Scholar]
- Gettman, D.; Head, L. Surrogate Safety Measures from Traffic Simulation Models. Transp. Res. Rec. J. Traportation Res. Board 2003. [Google Scholar] [CrossRef] [Green Version]
- Saccomanno, F.; Cunto, F.; Guido, G.; Vitale, A. Comparing Safety at Signalized Intersections and Roundabouts Using Simulated Rear-End Conflicts. Transp. Res. Rec. J. Transp. Res. Board 2008. [Google Scholar] [CrossRef]
- Astarita, V.; Guido, G.; Vitale, A.; Giofré, V. A new microsimulation model for the evaluation of traffic safety performances. Eur. Transp. -Trasp. Eur. 2012, 51, 1–2. [Google Scholar]
- Kim, H.; Kim, Y.; Jang, K. Systematic Relation of Estimated Travel Speed and Actual Travel Speed. IEEE Trans. Intell. Transp. Syst. 2017. [Google Scholar] [CrossRef]
- Hayward, J. Near Misses as a Measure of Safety at Urban Intersections. Ph.D. Thesis, Department of Civil Engineering, Pennsylvania State University, Pennsylvania, PA, USA, 1971. [Google Scholar]
- Minderhoud, M.M.; Bovy, P.H.L. Extended time-to-collision measures for road traffic safety assessment. Accid. Anal. Prev. 2001. [Google Scholar] [CrossRef]
- Huguenin, F.; Torday, A.; Dumont, A. Evaluation of traffic safety using microsimulation. In Proceedings of the 5th Swiss Transport Research Conference, Ascona, Switzerland, 9–11 March 2005. [Google Scholar]
- Allen, B.L.; Shin, B.T.; Cooper, P. Analysis of traffic conflicts and collisions. Transp. Res. Rec. 1978, 667, 67–74. [Google Scholar]
- Caliendo, C. Delay time model at unsignalized intersections. J. Transp. Eng. 2014. [Google Scholar] [CrossRef]
- Caliendo, C.; De Guglielmo, M.L. Road transition zones between the rural and urban environment: Evaluation of speed and traffic performance using a microsimulation approach. J. Transp. Eng. 2013. [Google Scholar] [CrossRef]
- Guido, G.; Astarita, V.; Giofré, V.; Vitale, A. Safety performance measures: A comparison between microsimulation and observational data. Procedia -Soc. Behav. Sci. 2011, 20, 217–225. [Google Scholar] [CrossRef] [Green Version]
- Astarita, V.; Giofrè, V.; Guido, G.; Vitale, A.; Festa, D.; Vaiana, R.; Iuele, T.; Mongelli, D.; Rogano, D.; Gallelli, V. New features of Tritone for the evaluation of traffic safety performances. In Transport Infrastructure and Systems; Taylor & Francis Group: London, UK, 2017; pp. 625–632. [Google Scholar]
- Darzentas, J.; Cooper, D.F.; Storr, P.A.; Mcdowell, M.R.C. Simulation of road traffic conflicts at T-junctions. Simulation 1980. [Google Scholar] [CrossRef]
- Cunto, F.J.C.; Saccomanno, F.F. Microlevel Traffic Simulation Method for Assessing Crash Potential at Intersections. In Proceedings of the Transportation Research Board 86th Annual Meeting, Washington, DC, USA, 21–23 January 2007. [Google Scholar]
- Cunto, F.; Saccomanno, F.F. Calibration and validation of simulated vehicle safety performance at signalized intersections. Accid. Anal. Prev. 2008. [Google Scholar] [CrossRef]
- Yang, H.; Ozbay, K.; Bartin, B. Application of Simulation-Based Traffic Conflict Analysis for Highway Safety Evaluation. In Proceedings of the 12th World Conference on Transport Research, Lisbon, Portugal, 11–15 July 2010. [Google Scholar]
- Wang, C.; Stamatiadis, N. Evaluation of a simulation-based surrogate safety metric. Accid. Anal. Prev. 2014. [Google Scholar] [CrossRef]
- Gettmann, D.; Pu, L.; Sayed, T.; Shelby, S. Surrogate Safety Assessment Model and Validation: Final Report; United States. Federal Highway Administration. Office of Safety Research and Development: McLean, VA, USA, 2008.
- Dijkstra, A.; Marchesini, P.; Bijleveld, F.; Kars, V.; Drolenga, H.; van Maarseveen, M. Do Calculated Conflicts in Microsimulation Model Predict Number of Crashes? Transp. Res. Rec. J. Transp. Res. Board 2010. [Google Scholar] [CrossRef]
- Caliendo, C.; Guida, M. Microsimulation Approach for Predicting Crashes at Unsignalized Intersections Using Traffic Conflicts. J. Transp. Eng. 2012. [Google Scholar] [CrossRef]
- El-Basyouny, K.; Sayed, T. Safety performance functions using traffic conflicts. Saf. Sci. 2013. [Google Scholar] [CrossRef]
- Huang, F.; Liu, P.; Yu, H.; Wang, W. Identifying if VISSIM simulation model and SSAM provide reasonable estimates for field measured traffic conflicts at signalized intersections. Accid. Anal. Prev. 2013. [Google Scholar] [CrossRef] [PubMed]
- Zhou, H.; Huang, F. Development of Traffic Safety Evaluation Method based on Simulated Conflicts at Signalized Intersections. Procedia-Soc. Behav. Sci. 2013. [Google Scholar] [CrossRef] [Green Version]
- Ambros, J.; Turek, R.; Paukrt, J. Road safety evaluation using traffic conflicts: Pilot comparison of micro-simulation and observation. In Proceedings of the International Conference on Traffic and Transport Engineering, Belgrade, Serbia, 27–28 November 2014. [Google Scholar]
- Shahdah, U.; Saccomanno, F.; Persaud, B. Integrated traffic conflict model for estimating crash modification factors. Accid. Anal. Prev. 2014. [Google Scholar] [CrossRef] [PubMed]
- Shahdah, U.; Saccomanno, F.; Persaud, B. Application of traffic microsimulation for evaluating safety performance of urban signalized intersections. Transp. Res. Part C Emerg. Technol. 2015. [Google Scholar] [CrossRef]
- Zha, L.; Songchitruksa, P.; Balke, K. Next Generation Safety Performance Monitoring at Signalized Intersections Using Connected Vehicle Technology. Master’s Thesis, Texas A & M University, College Station, TX, USA, 2014. [Google Scholar]
- Morando, M.M.; Tian, Q.; Truong, L.T.; Vu, H.L. Studying the Safety Impact of Autonomous Vehicles Using Simulation-Based Surrogate Safety Measures. J. Adv. Transp. 2018. [Google Scholar] [CrossRef]
- Astarita, V.; Festa, D.C.; Giofrè, V.P.; Guido, G.; Vitale, A. The use of Smartphones to assess the Feasibility of a Cooperative Intelligent Transportation Safety System based on Surrogate Measures of Safety. Procedia Comput. Sci. 2018, 134, 427–432. [Google Scholar] [CrossRef]
- Vaiana, R.; Iuele, T.; Astarita, V.; Caruso, M.V.; Tassitani, A.; Zaffino, C.; Giofrè, V.P. Driving behavior and traffic safety: An acceleration-based safety evaluation procedure for smartphones. Mod. Appl. Sci. 2014. [Google Scholar] [CrossRef]
- Astarita, V.; Guido, G.; Vitale, A.; Gallelli, V. Analysis of Non-Conventional Roundabouts Performances Through Microscopic Traffic Simulation. Appl. Mech. Mater. 2014. [Google Scholar] [CrossRef]
- Astarita, V. Flow propagation description in dynamic network loading models. In Proceedings of the International Conference on Applications of Advanced Technologies in Transportation Engineering, Capri, Italy, 31 July 1996. [Google Scholar]
- Guido, G.; Saccomanno, F.; Vitale, A.; Astarita, V.; Festa, D. Comparing safety performance measures obtained from video capture data. J. Transp. Eng. 2011, 137. [Google Scholar] [CrossRef]
- Guido, G.; Vitale, A.; Saccomanno, F.F.; Festa, D.C.; Astarita, V.; Rogano, D.; Gallelli, V. Using Smartphones as a Tool to Capture Road Traffic Attributes. Appl. Mech. Mater. 2013. [Google Scholar] [CrossRef]
- Astarita, V.; Guido, G.; Mongelli, D.; Giofrè, V.P. A co-operative methodology to estimate car fuel consumption by using smartphone sensors. Transport 2015, 30. [Google Scholar] [CrossRef] [Green Version]
- Festa, D.C.; Mongelli, D.W.E.; Astarita, V.; Giorgi, P. First results of a new methodology for the identification of road surface anomalies. In Proceedings of the 2013 IEEE International Conference on Service Operations and Logistics, and Informatics, Dongguan, China, 28–30 July 2013. [Google Scholar]
- Astarita, V.; Guido, G.; Mongelli, D.W.E.; Giofrè, V.P. Ecosmart and TutorDrive: Tools for fuel consumption reduction. In Proceedings of the 2014 IEEE International Conference on Service Operations and Logistics, and Informatics, SOLI 2014, Qingdao, China, 8–10 October 2014. [Google Scholar]
- Astarita, V.; Giofrè, V.P. Trajectory Perturbation in Surrogate Safety Indicators. Transp. Res. Procedia 2020, 8. [Google Scholar] [CrossRef]
- Davis, G.A.; Hourdos, J.; Xiong, H.; Chatterjee, I. Outline for a causal model of traffic conflicts and crashes. Accid. Anal. Prev. 2011. [Google Scholar] [CrossRef] [PubMed]
- Bevrani, K.; Chung, E. An Examination of the Microscopic Simulation Models to Identify Traffic Safety Indicators. Int. J. Intell. Transp. Syst. Res. 2012. [Google Scholar] [CrossRef] [Green Version]
- Stutts, J.; Gish, K. Distraction in Everyday Driving. Rep. Prep. AAA Found. Trafic Saf. 2003. [Google Scholar] [CrossRef] [Green Version]
- Pu, L.; Joshi, R. Surrogate Safety Assessment Model (SSAM): Software User Manual. 2008. Available online: https://rosap.ntl.bts.gov/view/dot/1008 (accessed on 26 August 2020).
- Souleyrette, R.; Hochstein, J. Development of a Conflict Analysis Methodology Using SSAM. 2012. Available online: https://works.bepress.com/reginald_souleyrette/45/ (accessed on 26 August 2020).
- Ivan, J.N.; Konduri, K.C. Chapter 15. Crash Severity Methods. In Safe Mobility: Challenges, Methodology and Solutions (Transport and Sustainability, Vol. 11); Dominique, L., Washington, S., Eds.; Emerald Publishing Limited: Bingley, UK, 2018; pp. 325–350. [Google Scholar]
- Laureshyn, A.; De Ceunynck, T.; Karlsson, C.; Svensson, Å.; Daniels, S. In search of the severity dimension of traffic events: Extended Delta-V as a traffic conflict indicator. Accid. Anal. Prev. 2017. [Google Scholar] [CrossRef] [Green Version]
- Guido, G.; Astarita, V.; Giofré, V.P.; Vitale, A. Using traffic microsimulation to evaluate potential crashes: Some results. In Proceedings of the 2019 IEEE/ACM 23rd International Symposium on Distributed Simulation and Real Time Applications (DS-RT), Rende, Italy, 7–9 October 2019. [Google Scholar]
- Alonso, B.; Astarita, V.; Dell’Olio, L.; Giofrè, V.P.; Guido, G.; Marino, M.; Sommario, W.; Vitale, A. Validation of Simulated Safety Indicators with Traffic Crash Data. Sustainability 2020, 12, 925. [Google Scholar] [CrossRef] [Green Version]
- Joksch, H.C. Velocity change and fatality risk in a crash—A rule of thumb. Accid. Anal. Prev. 1993. [Google Scholar] [CrossRef]
- Evans, L. Driver injury and fatality risk in two-car crashes versus mass ratio inferred using Newtonian mechanics. Accid. Anal. Prev. 1994. [Google Scholar] [CrossRef]
- The Highways Agency UK; The Welsh Office; The Scottish Office Department; The Department of The Environment Northern Ireland; The Department of Transport UK. Traffical Appraisal of Roads Schemes. In Design Manual for Roads and Bridges; UK Department for Transport: London, UK, 1996; Volume 12. Available online: http://assets.highwaysengland.co.uk/roads/road-projects/a2-bean-ebbsfleet-junction-improvements/Orders/I.8+DMRB+Part+1+Traffic+Appraisal.pdf (accessed on 26 August 2020).
- Washington, S.P.; Karlaftis, M.G.; Mannering, F.L. Statistical and Econometric Methods for Transportation Data Analysis, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2010; ISBN 9781420082869. [Google Scholar]
- Mannering, F.L.; Bhat, C.R. Analytic methods in accident research: Methodological frontier and future directions. Anal. Methods Accid. Res. 2014. [Google Scholar] [CrossRef]
- Mannering, F.L.; Shankar, V.; Bhat, C.R. Unobserved heterogeneity and the statistical analysis of highway accident data. Anal. Methods Accid. Res. 2016. [Google Scholar] [CrossRef]
- Milton, J.C.; Shankar, V.N.; Mannering, F.L. Highway accident severities and the mixed logit model: An exploratory empirical analysis. Accid. Anal. Prev. 2008. [Google Scholar] [CrossRef]
- Anastasopoulos, P.C.; Mannering, F.L. A note on modeling vehicle accident frequencies with random-parameters count models. Accid. Anal. Prev. 2009. [Google Scholar] [CrossRef] [PubMed]
- Anastasopoulos, P.C.; Mannering, F.L. An empirical assessment of fixed and random parameter logit models using crash- and non-crash-specific injury data. Accid. Anal. Prev. 2011. [Google Scholar] [CrossRef] [PubMed]
- Caliendo, C.; De Guglielmo, M.L. Accident analysis based on fixed and random-parameters models. Int. J. Civ. Eng. Technol. 2017, 8, 1150–1160. [Google Scholar]
- Conway, K.S.; Kniesner, T.J. The important econometric features of a linear regression model with cross-correlated random coefficients. Econ. Lett. 1991. [Google Scholar] [CrossRef]
- Yu, R.; Xiong, Y.; Abdel-Aty, M. A correlated random parameter approach to investigate the effects of weather conditions on crash risk for a mountainous freeway. Transp. Res. Part C Emerg. Technol. 2015. [Google Scholar] [CrossRef]
- Coruh, E.; Bilgic, A.; Tortum, A. Accident analysis with the random parameters negative binomial panel count data model. Anal. Methods Accid. Res. 2015. [Google Scholar] [CrossRef]
- Hou, Q.; Tarko, A.P.; Meng, X. Analyzing crash frequency in freeway tunnels: A correlated random parameters approach. Accid. Anal. Prev. 2018. [Google Scholar] [CrossRef] [PubMed]
- Greene, W.H. Limdep Version 9.0-Reference Guide; Econometric software: New York, NY, USA, 2007. [Google Scholar]
- Hilbe, J.M. Negative Binomial Regression; Cambridge University Press: Cambridge, UK, 2007; ISBN 9780511811852. [Google Scholar]
- Saeed, T.U.; Hall, T.; Baroud, H.; Volovski, M.J. Analyzing road crash frequencies with uncorrelated and correlated random-parameters count models: An empirical assessment of multilane highways. Anal. Methods Accid. Res. 2019. [Google Scholar] [CrossRef]
- Halton, J.H. On the efficiency of certain quasi-random sequences of points in evaluating multi-dimensional integrals. Numer. Math. 1960. [Google Scholar] [CrossRef]
- Damm, W. Traffic Sequence Charts—A Formal Visual Specification Language for Requirement Capture and Specification Development of Highly Autonomous Cars. Electron. Proc. Theor. Comput. Sci. 2017, 257, 1–2. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Intersection Scenario | Crash Data and Traffic Volume for Each Scenario | Time | Total Number of Crashes | |||||
|---|---|---|---|---|---|---|---|---|
| 7:00–8:00 a.m. | 8:00–9:00 a.m. | 12:00 a.m.–1:00 p.m. | 1:00–2:00 p.m. | 6:00–7:00 p.m. | 7:00–8:00 p.m. | |||
| I | Total number of crashes | 1 | 8 | 25 | 13 | 5 | 4 | 56 |
| (i = 1–3) | (veh./h) | 4539 | 6759 | 6620 | 6820 | 5878 | 5898 | |
| II | Total number of crashes | 1 | 1 | 2 | 2 | 3 | 3 | 12 |
| (i = 4 and 5) | (veh./h) | 5317 | 5902 | 4665 | 5150 | 5510 | 4982 | |
| III | Total number of crashes | 1 | 4 | 3 | 4 | 5 | 5 | 22 |
| (i = 6–8) | (veh./h) | 4974 | 7024 | 5248 | 4561 | 5583 | 4956 | |
| IV | Total number of crashes | 0 | 4 | 0 | 3 | 2 | 1 | 10 |
| (i = 9) | (veh./h) | 1310 | 2358 | 1998 | 2085 | 2046 | 1940 | |
| Total number of crashes | 100 | |||||||
| Intersection Scenario | Variables | Time | |||||
|---|---|---|---|---|---|---|---|
| 7:00–8:00 a.m. | 8:00–9:00 a.m. | 12:00 a.m.–1:00 p.m. | 1:00–2:00 p.m. | 6:00–7:00 p.m. | 7:00–8:00 p.m. | ||
| I | Mean Energy [kJ] | 7.65 | 6.61 | 6.15 | 6.68 | 5.72 | 5.28 |
| Collisions | 24,948 | 43,185 | 38,347 | 37,331 | 35,130 | 35,920 | |
| Collisions * | 6686 | 9088 | 9414 | 9093 | 8878 | 9321 | |
| II | Mean Energy [kJ] | 119.65 | 76.29 | 52.30 | 132.43 | 60.04 | 90.88 |
| Collisions | 10,283 | 17,290 | 22,456 | 7804 | 14,935 | 7896 | |
| Collisions * | 209 | 1492 | 1662 | 71 | 1070 | 86 | |
| III | Mean Energy [kJ] | 57.05 | 54.90 | 62.31 | 57.63 | 51.95 | 47.68 |
| Collisions | 37,236 | 80,828 | 42,809 | 31,533 | 47,904 | 39,918 | |
| Collisions * | 418 | 1450 | 1529 | 2310 | 796 | 757 | |
| IV | Mean Energy [kJ] | 16.75 | 21.26 | 16.90 | 12.18 | 13.29 | 12.24 |
| Collisions | 16,790 | 40,503 | 31,130 | 31,067 | 33,812 | 25,909 | |
| Collisions * | 3925 | 6718 | 5942 | 6139 | 5203 | 5421 | |
| Intersection Scenario | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| I | II | III | IV | |||||||||
| Mean Energy (kJ) | Collision * | Traffic Flow (veh./h) | Mean Energy (kJ) | Collision * | Traffic Flow (veh./h) | Mean Energy (kJ) | Collision * | Traffic Flow (veh./h) | Mean Energy (kJ) | Collision * | Traffic Flow (veh./h) | |
| Mean | 6.35 | 8746.67 | 6085.67 | 88.60 | 765.00 | 5254.33 | 55.25 | 1210.00 | 5391.00 | 15.44 | 5558.00 | 1956.17 |
| SD | 0.83 | 1027.16 | 865.87 | 32.17 | 731.84 | 429.22 | 5.04 | 688.95 | 869.02 | 3.55 | 963.55 | 348.05 |
| Min | 5.28 | 6686.00 | 4539.00 | 52.30 | 71.00 | 4665.00 | 47.68 | 418.00 | 4561.00 | 12.18 | 3925.00 | 1310.00 |
| Max | 7.65 | 9414.00 | 6820.00 | 132.43 | 1662.00 | 5902.00 | 62.31 | 2310.00 | 7024.00 | 21.26 | 6718.00 | 2358.00 |
| Variables | Model A—Correlated Random-Parameter Poisson (CRPP) Model | ||
|---|---|---|---|
| Point Estimate | Standard Error | Likelihood Ratio Test (LRT) Statistic | |
| Fixed Parameters | |||
| Constant | −0.385 | 0.577 | |
| C* (Collisions)/10.000 | 0.624 | 0.513 | 2.99 |
| Random Parameters | |||
| TF (Traffic Flow)/10.000 (veh./h) | 2.468 | 1.044 | 9.39 |
| Du (Dummy variable) | 1.067 | 0.477 | 8.31 |
| Other statistical information | |||
| Number of observations | 24 | ||
| Log likelihood function | −45.328 | ||
| Variables | Model B—Correlated Random-Parameter Poisson (CRPP) Model | ||
|---|---|---|---|
| Point Estimate | Standard Error | LRT Statistic | |
| Fixed Parameters | |||
| Constant | 0.029 | 0.455 | |
| Random Parameters | |||
| Ea (Mean Energy) (J × 104) | −0.071 | 0.061 | 3.66 |
| TF (Traffic Flow)/10.000 (veh./h) | 2.737 | 1.057 | 11.16 |
| Du (Dummy variable) | 1.094 | 0.427 | 7.90 |
| Other statistical information | |||
| Number of observations | 24 | ||
| Log likelihood function | −44.991 | ||
| Variables | TF | Du |
|---|---|---|
| TF (Traffic Flow)/10.000 | 1.00 | 0.19 |
| Du (Dummy variable) | 0.19 | 1.00 |
| Variables | Ea | TF | Du |
|---|---|---|---|
| Ea (Mean Energy) | 1.00 | 0.11 | −0.36 |
| TF (Traffic Flow)/10.000 | 0.11 | 1.00 | 0.88 |
| Du (Dummy variable) | −0.36 | 0.88 | 1.00 |
| Intersection Scenario | Number of Total Crashes (5 Years) | Model A | Model B | ||
|---|---|---|---|---|---|
| Expected Number of Total Crashes (5 Years) | RMSE | Expected Number of Total Crashes (5 Years) | RMSE | ||
| I | 56.00 | 56.79 | 3.83 | 56.48 | 3.96 |
| II | 12.00 | 15.76 | 1.16 | 14.23 | 1.00 |
| III | 22.00 | 17.02 | 1.63 | 18.73 | 1.51 |
| IV | 10.00 | 9.44 | 1.35 | 9.49 | 1.40 |
| TOT | 100.00 | 99.00 | 2.26 | 98.94 | 2.29 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Astarita, V.; Caliendo, C.; Giofrè, V.P.; Russo, I. Surrogate Safety Measures from Traffic Simulation: Validation of Safety Indicators with Intersection Traffic Crash Data. Sustainability 2020, 12, 6974. https://0-doi-org.brum.beds.ac.uk/10.3390/su12176974
Astarita V, Caliendo C, Giofrè VP, Russo I. Surrogate Safety Measures from Traffic Simulation: Validation of Safety Indicators with Intersection Traffic Crash Data. Sustainability. 2020; 12(17):6974. https://0-doi-org.brum.beds.ac.uk/10.3390/su12176974
Chicago/Turabian StyleAstarita, Vittorio, Ciro Caliendo, Vincenzo Pasquale Giofrè, and Isidoro Russo. 2020. "Surrogate Safety Measures from Traffic Simulation: Validation of Safety Indicators with Intersection Traffic Crash Data" Sustainability 12, no. 17: 6974. https://0-doi-org.brum.beds.ac.uk/10.3390/su12176974