
Hydrostatic Pressure Wheel for Regulation of Open Channel Networks and for the Energy Supply of Isolated Sites


Abstract
:1. Introduction
2. Operating Principle and Theoretical Models
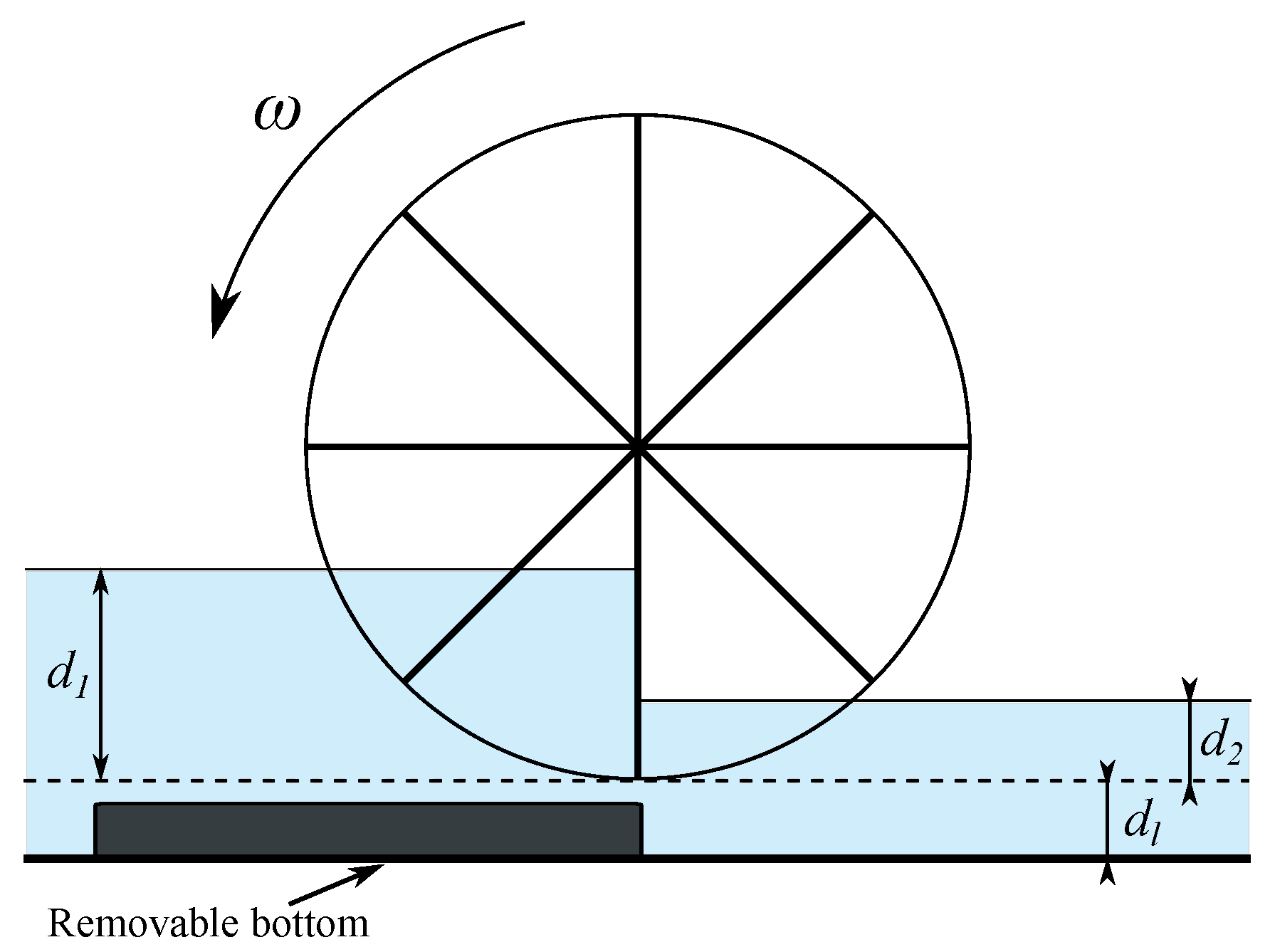
2.1. Operating Principle
2.2. Theoretical Model
- water depths ratio: ;
- vertical gap ratio: ;
- equivalent vertical gap ratio: ;
- horizontal gap ratio: ;
- blade length ratio: ;
- wheel width ratio: .
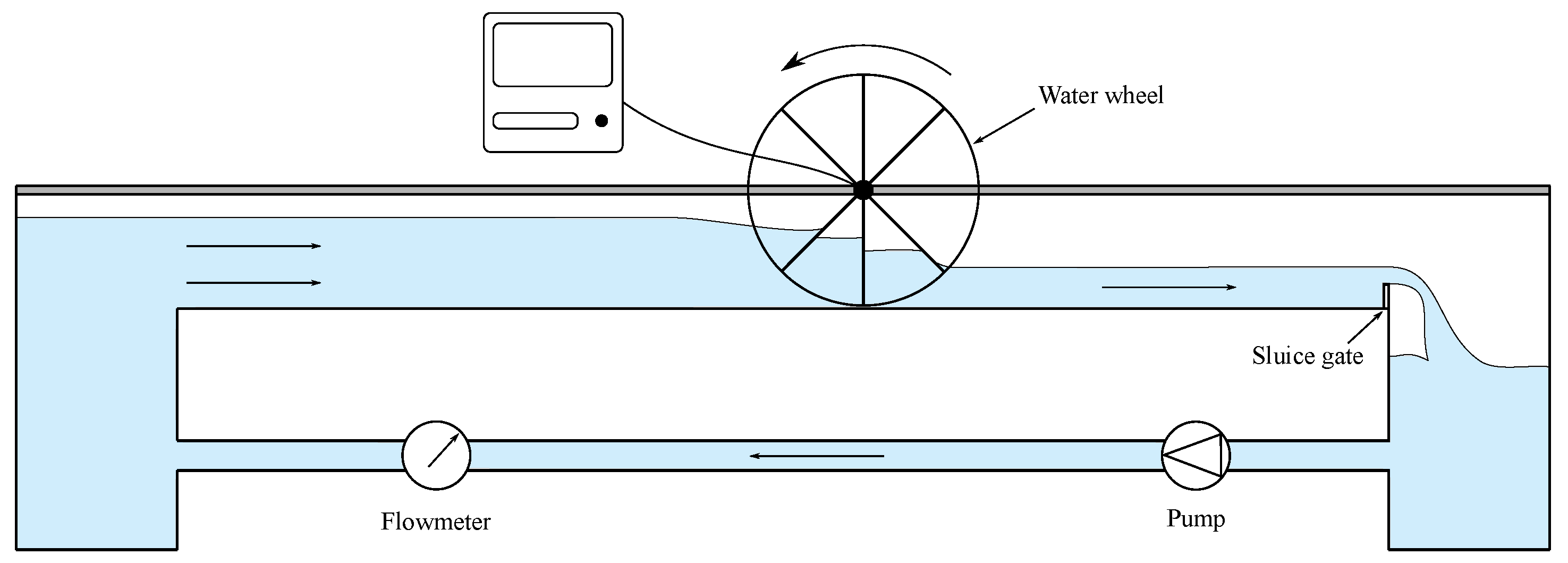
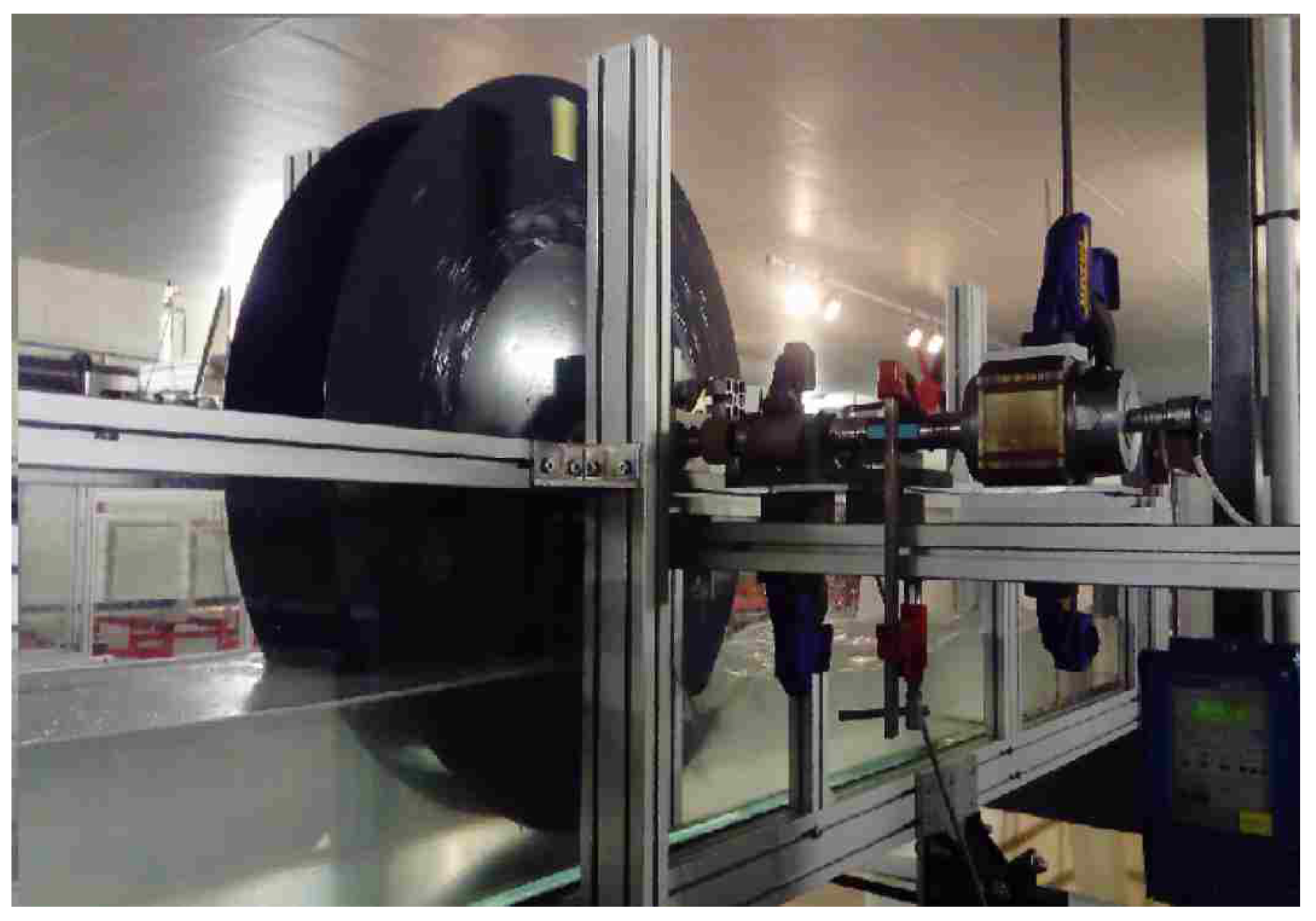
3. Experimental Setup
4. Results
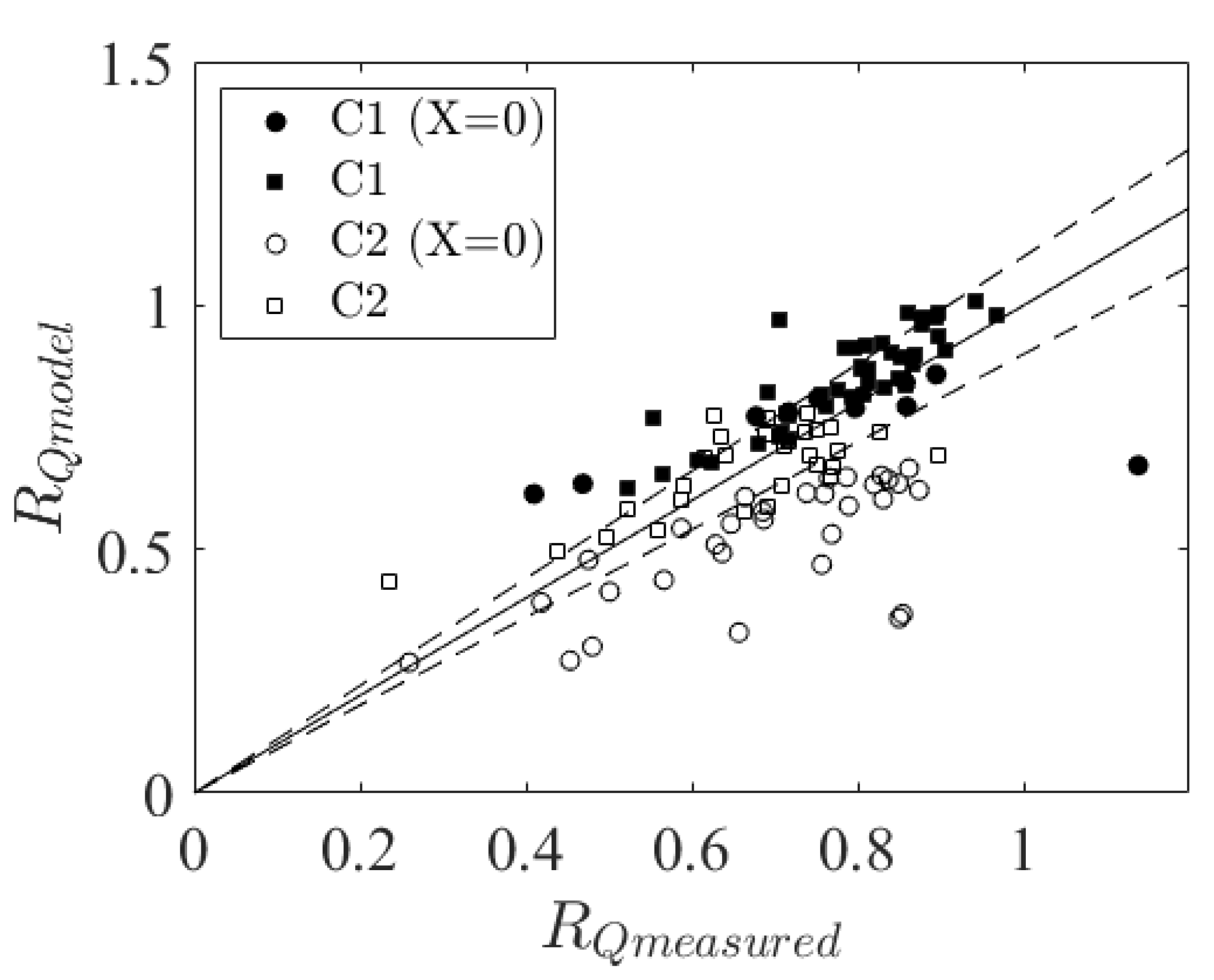
4.1. Model Calibration
4.2. Power and Efficiency
5. Discussion
5.1. Regulation of Water Levels
5.2. Electric Production for Isolated Site
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Butera, I.; Balestra, R. Estimation of the hydropower potential of irrigation networks. Renew. Sustain. Energy Rev. 2015, 48, 140–151. [Google Scholar] [CrossRef]
- Kim, B.; Azzaro-Pantel, C.; Pietrzak-David, M.; Maussion, P. Life cycle assessment for a solar energy system based on reuse components for developing countries. J. Clean. Prod. 2019, 208, 1459–1468. [Google Scholar] [CrossRef] [Green Version]
- Williamson, S.J.; Stark, B.H.; Booker, J.D. Low head pico hydro turbine selection using a multi-criteria analysis. Renew. Energy 2014, 61, 43–50. [Google Scholar] [CrossRef]
- Quaranta, E.; Revelli, R. Gravity water wheels as a micro hydropower energy source: A review based on historic data, design methods, efficiencies and modern optimizations. Renew. Sustain. Energy Rev. 2018, 97, 414–427. [Google Scholar] [CrossRef]
- Müller, G.; Kauppert, K. Performance characteristics of water wheels. J. Hydraul. Res. 2004, 42, 451–460. [Google Scholar] [CrossRef]
- Quaranta, E. Stream water wheels as renewable energy supply in flowing water: Theoretical considerations, performance assessment and design recommendations. Energy Sustain. Dev. 2018, 45, 96–109. [Google Scholar] [CrossRef]
- Quaranta, E.; Revelli, R. Output power and power losses estimation for an overshot water wheel. Renew. Energy 2015, 83, 979–987. [Google Scholar] [CrossRef]
- Quaranta, E.; Revelli, R. Performance characteristics, power losses and mechanical power estimation for a breastshot water wheel. Energy 2015, 87, 315–325. [Google Scholar] [CrossRef]
- Quaranta, E.; Revelli, R. Optimization of breastshot water wheels performance using different inflow configurations. Renew. Energy 2016, 97, 243–251. [Google Scholar] [CrossRef]
- Quaranta, E.; Revelli, R. Hydraulic Behavior and Performance of Breastshot Water Wheels for Different Numbers of Blades. J. Hydraul. Res. 2017, 143, 04016072. [Google Scholar] [CrossRef]
- Vidali, C.; Fontan, S.; Quaranta, E.; Cavagnero, P.; Revelli, R. Experimental and dimensional analysis of a breastshot water wheel. J. Hydraul. Res. 2016, 54, 473–479. [Google Scholar] [CrossRef]
- Quaranta, E.; Revelli, R. CFD simulations to optimize the blades design of water wheels. Drink. Water Eng. Sci. Discuss. 2017, 10, 27–32. [Google Scholar] [CrossRef] [Green Version]
- Quaranta, E.; Müller, G. Sagebien and Zuppinger water wheels for very low head hydropower applications. J. Hydraul. Res. 2018, 56, 526–536. [Google Scholar] [CrossRef] [Green Version]
- Senior, J.; Saenger, N.; Müller, G. New hydropower converters for very low-head differences. J. Hydraul. Res. 2010, 48, 703–714. [Google Scholar] [CrossRef]
- Belaud, G.; Cassan, L.; Baume, J.P. Calculation of Contraction Coefficient under Sluice Gates and Application to Discharge Measurement. J. Hydraul. Eng. 2009, 135, 1086–1091. [Google Scholar] [CrossRef] [Green Version]
- Belaud, G.; Cassan, L.; Baume, J.P. Contraction and Correction Coefficients for Energy-Momentum Balance under Sluice Gates. In Proceedings of the World Environmental and Water Resources Congress 2012, Albuquerque, NM, USA, 20–24 May 2012. [Google Scholar] [CrossRef]
- Guiot, L.; Cassan, L.; Belaud, G. Modeling the Hydromechanical Solution for Maintaining Fish Migration Continuity at Coastal Structures. J. Irrig. Drain. Eng. 2020, 146, 04020036. [Google Scholar] [CrossRef]
- Guiot, L.; Cassan, L.; Dorchies, D.; Sagnes, P.; Belaud, G. Hydraulic management of coastal freshwater marsh to conciliate local water needs and fish passage. J. Ecohydraul. 2020, in press. [Google Scholar] [CrossRef]
- UNCTAD. The Least Developed Countries Report 2017: Transformational Energy Access; United Nations Conference on Trade and Development: Geneva, Switzerland, 2017. [Google Scholar]
- Baudoin, J.M.; Burgun, V.; Chanseau, M.; Larinier, M.; Ovidio, M.; Sremski, W.; Steinbach, P.; Voegtle, B. The ICE Protocol for Ecological Continuity—Assessing the Passage of Obstacles by Fish: Concepts, Design and Application; Onema: Vincennes, France, 2014. [Google Scholar]
- Müller, G.; Kauppert, K. Old watermills—Britain’s new source of energy? Civ. Eng. 2002, 150, 178–186. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geometrical Parameters | Outer radius—r (m) | 0.4 |
| Material | PVC | |
| Width—L (m) | 0.2 | |
| Number of blades | 8 | |
| Channel width—B (m) | 0.4 | |
| Vertical gap— (m) | 0.025 and 0.05 | |
| Horizontal gap— (m) | 0.002 | |
| Flow conditions | Flow rate—Q (m s) | 0.005 … 0.025 |
| (m) | (m) | w (m) | ||
|---|---|---|---|---|
| 0.02 | 0.002 | 0.026 | 4 | |
| 0.05 | 0.002 | 0.025 | 4–10 |
| Geometrical Parameters | Outer radius—r (m) | 1 |
| Width—L (m) | 1 | |
| Number of blades | 8 | |
| Vertical gap— (m) | 0.025 | |
| Horizontal gap— (m) | 0.02 | |
| Equivalent opening—w (m) | 0.075 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cassan, L.; Dellinger, G.; Maussion, P.; Dellinger, N. Hydrostatic Pressure Wheel for Regulation of Open Channel Networks and for the Energy Supply of Isolated Sites. Sustainability 2021, 13, 9532. https://0-doi-org.brum.beds.ac.uk/10.3390/su13179532
Cassan L, Dellinger G, Maussion P, Dellinger N. Hydrostatic Pressure Wheel for Regulation of Open Channel Networks and for the Energy Supply of Isolated Sites. Sustainability. 2021; 13(17):9532. https://0-doi-org.brum.beds.ac.uk/10.3390/su13179532
Chicago/Turabian StyleCassan, Ludovic, Guilhem Dellinger, Pascal Maussion, and Nicolas Dellinger. 2021. "Hydrostatic Pressure Wheel for Regulation of Open Channel Networks and for the Energy Supply of Isolated Sites" Sustainability 13, no. 17: 9532. https://0-doi-org.brum.beds.ac.uk/10.3390/su13179532