1. Introduction
Virtual Reality (VR) is a computer-generated environment that allows immersion in a virtual world through computational graphics applications [
1]. The aim purpose of this graphics implementation is that the virtual world has a real aspect (virtual realism), real sound (auditive realism), and the user feels like part of that environment (haptic realism) [
2]. Therefore, these aspects could be carried out through optic devices, electronics, and computational implementations to have a visual representation and a hand simulation to realize different tasks inside the virtual environment such as pick up, place, alter and order objects taking into consideration their hand position and movements [
3].
Virtual worlds could be created through the implementation of software; however, the development of digital human models requires hardware capable of functioning as an interface between the computer system and the user. Optical devices such as deep vision cameras (Leap Motion Controller™, Leap Motion Inc., San Francisco, CA, USA, Kinect™, Microsoft, WA, USA, Oculus Rift™, Oculus VR LLC, San Francisco, CA, USA), infrared cameras, pressure sensors, motion sensors, joysticks, and accelerometers, among others, complement the perception of the simulated environment. Because of this, Virtual Reality application has grown, making this technology a useful tool to satisfy current needs in several areas of knowledge such as education [
4,
5,
6,
7], industry [
2,
8], music [
9], medicine [
10,
11], architecture [
12], and Virtual Laboratories [
13,
14], where it is possible to reproduce the conditions of a real environment with visual, tactile, and auditive stimulus [
15,
16].
Virtual Reality application areas are different and to a certain extent are owing to Industry 4.0 emergence, but the principal approach of these technologies is based on learning [
17,
18,
19,
20,
21,
22] and training [
14,
23,
24,
25,
26,
27] stages. In the case of automotive Virtual Reality immersive applications, some examples include: driving simulators [
28,
29,
30,
31], automotive design [
32,
33,
34], and virtual automotive ergonomics [
35,
36]. Hence, this work aims towards the development of a virtual laboratory that complements the Automotive Systems Engineering formation with the use of a virtual environment; this environment enables the students to have an immersive experience to visualize and have an auditive description of different pieces that are part of a combustion engine. It allows the interaction and manipulation of pieces through hand controls, and principally, allows users to participate in the process of a combustion engine’s assembly using Unity3D Game Engine
® Software (Unity Software Inc., San Francisco, CA, USA) and the Virtual Reality headset Oculus Rift S. Moreover, there is a previous work from this research group where an augmented reality portable application in Android™ OS was developed. This application, in conjunction with a device that has a camera, allows the user a visualization of 3D models of four-stroke engine principal parts, besides obtaining additional information about their operation through the Otto thermodynamic cycle [
37].
Concerning the field of education, a Virtual Laboratory implementation has some advantages compared to real laboratory installations, because the latter could have available material restrictions to practice, and occasionally, the teacher is the one who is working, and students are limited to observing and do not interact with the tools and the equipment. Additionally, depending on the risks of laboratory practice, feedback is required, which is not necessary for a Virtual Laboratory. For that reason, the Virtual Laboratory could be considered as a cost-effective and fully controllable educational tool that allows practice repetitively and in an easier form, leading to the student self-learning, becoming capable of understanding real-life challenges, and developing engineering skills; as such, Virtual Laboratories become interesting and attract students’ attention and participation [
27,
38,
39,
40].
This paper is organized as follows:
Section 2 focuses on the scientometrics values of Virtual Reality research in several knowledge areas.
Section 3 presents the materials and methods implemented to develop a Virtual Laboratory for automotive engineering students.
Section 4 explains the results obtained after the development and testing of the Virtual Laboratory. In
Section 5 a discussion from the results is carried out and
Section 6 presents the conclusions.
2. Scientometric Analysis
A scientometric analysis of the use of Virtual Reality in education and training in automotive industry was carried out using the Scopus database; the maximum search date was 21 July 2021. Various terms such as “Virtual Reality”, “education”, “training”, “learning”, “assessment”, and “automotive” were used. After conducting the search, the documents were reviewed individually to eliminate duplicates, as well as to discard documents that were not relevant to the use of Virtual Reality in education or training. The documents found were distributed as shown in
Table 1.
In the data, a clear trend in the publication of documents from around 1991 to 2012 is not found, with a small growth between 2003 and 2005 in which works related to 3D simulators for training in virtual environments are presented either for driving vehicles [
41,
42] or work on assembly lines in the automotive industry [
43] and aeronautics [
44], and for training for astronauts [
45], until, starting in 2013–2014, an important growth in the publication of documents begins, with a peak of publications in 2019 with 38 documents. In
Figure 1, the trend of publications over time is shown.
In the case of the geographical distribution of the affiliations of the documents’ correspondence authors, it was found that the country with the highest number of publications is the United States with a total of 29, followed by Germany with a total of 19 and in third place the United Kingdom with 16 documents. It is important to note that these countries have a consolidated automotive industry, so the search for new techniques for education or training in this area is not strange. In the
Figure 2, the geographical distribution of the documents is shown.
Additionally, an analysis of the collaborative work for the publication of documents was carried out. The figure shows the collaborative work between the authors’ countries; in addition to the formation of certain working groups, three of them are mainly focused on the United Kingdom, while other groups are made up of Colombia-Spain, another of Saudi Arabia and Tunisia, and finally another made up of the Netherlands, Norway, Finland, South Africa, Nigeria and Oman. The groups show that the countries with the largest automotive industry collaborate together. This is shown in
Figure 3.
For the case of the authors’ affiliations, the University of Nottingham from the United Kingdom has five documents, followed by the Kazan Federal University from Russia, Mississippi State University from the United States, University of Zagreb from Croatia, and Yung-ta Institute of Technology and Commerce from China, all of whom report four documents each.
On the other hand, for the case of the journals, books, or conference proceedings where these documents were published, it is found that most of them were published in a series of books by Springer-Verlang, Lecture notes in computer science, with a total of 16 articles; the following is the SAE (Society of Automobile Engineers of the United States) Technical Papers with a total of 13 publications; and with six publications are the conference proceedings: Conference on human factors in computing systems and the Proceedings of the SPIE series.
Finally, the authors’ keywords were analyzed using a Fruchterman-Reingold graphic. This clustering technique reveals the existing relationships among concepts, in this case for authors’ keywords. In this graphic it is shown that, around the main term “Virtual Reality”, there are some terms that describes the documents; they are grouped in three categories, each one represented by a different color (blue, green, and red), and considering different aspects of the use of Virtual Reality in the education or training in automotive industry,
Figure 4. In color blue, there are the terms related to education, training, and learning systems (in augmented and Virtual Reality); in green there are terms related to automotive industry and design; finally, in red there are terms related to people and automobiles, the main actors in this process.
In the Automotive System Engineering program, as an antecedent, it was started with a Virtual Reality application development to provide a user the assembly and disassembly of the principal pieces of a four-stroke engine with the use of sensors (Leap Motion Controller™) and Virtual Reality headset Oculus Rift S, where it is implemented 6-DoF (six degrees of freedom) as an Education 4.0 learning tool using the Industry 4.0 technological pillars, which will allow to students have the necessary requirements in the professional performance [
14,
46].
3. Materials and Methods
As described above, this research was focused on the development of a Virtual Reality Lab for teaching and training in Automotive Systems Engineering students at Unidad Profesional Interdisciplinaria de Ingeniería Campus Hidalgo from Instituto Politécnico Nacional of México. For this goal, a 3D virtual environment in Unity3D software that can be used through Virtual Reality Headset or by Optical Hand-Tracking Module was developed. For the research, a virtual model of the Automotive Systems Laboratory of the faculty was developed. In this case, we only focused on the engine’s assembly and disassembly module.
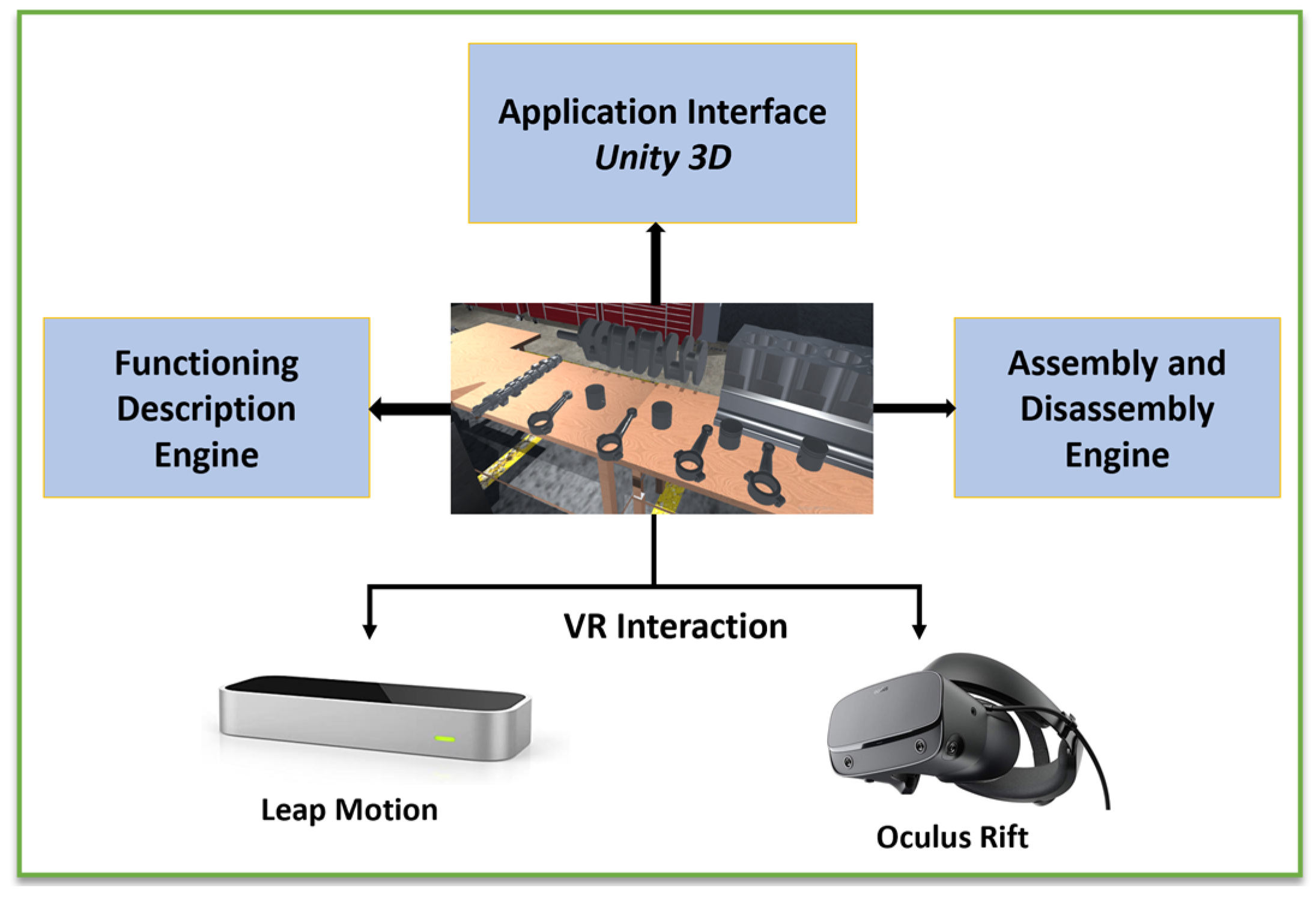
For the development of the Virtual Reality environment, the following requirements and operation modes were established:
Functional description of the main parts that integrate the four-stroke engine.
Capacity to manipulate engine parts individually and together, in such a way that the engine can be assembled and disassembled.
Handling of the pieces using Virtual Reality headset or Optical Hand-Tracking sensors.
Interactively show the operation of the four-stroke engine.
The main scenario should keep closer details to the actual working laboratory.
These characteristics are comprised in
Figure 5, where a representative diagram of the developed environment is depicted.
3.1. Virtual Environment
As a first step for developing the Virtual Reality application, the main scenario was built, which consisted of recreating a virtual analog of the real teaching laboratory. To create the main scenario, the Unity3D Game Engine® Software was used with the corresponding plugins, to generate an environment in Virtual Reality.
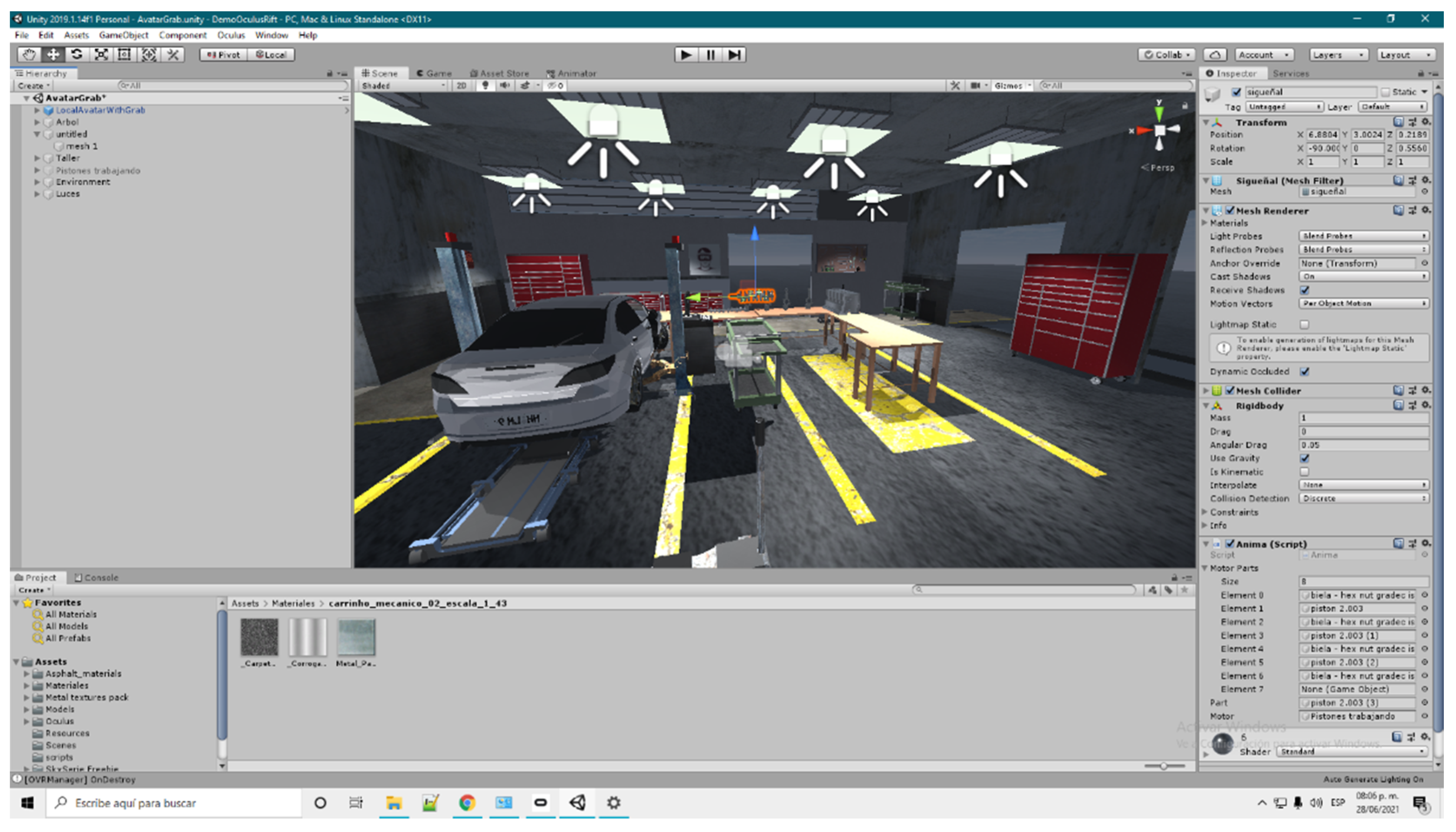
For the building of the main scene, it was considered to keep as many as possible details from the actual lab, including tool panels, worktables, lighting, computers, and lab entrances, as we can see in
Figure 6. Although these objects do not interact with the user, they help them to navigate correctly through the virtual scene, in addition, they generate a minimal computational load on the application. The object on which the user interacts is a four-stroke engine, which was designed using SolidWorks
® Software based on the following elements: camshaft, crankshaft, pistons, connecting rods, and monobloc, there being a total of 11 objects that can be manipulated.
For the interaction between the users and objects, several scripts were written in C# programming language integrated directly in Unity3D. These scripts allow objects to have three functions; the first one allows individual manipulation of the object, i.e., the user will be able to hold, orient, and position it in several directions; the second function allows joint operation, i.e., the objects will be able to join when placed in the correct position, allowing the motor to be configured in its operation configuration; therefore, this script allows the engine assembly or disassembly.
The third script shows detailed information on the operation of the piece held by the user inside the motor on the stage. Finally, there is a script whose task is to activate an animation of the engine operation; this script is activated only when the user has correctly assembled all engine pieces. The animation was developed through a free and open-source 3D Modeling and Animation Software (Blender) before being imported into Unity3D, to ensure a better fluidity and quality when running in the Virtual Reality application.
As interaction devices, an Oculus Rift S (Oculus VR, San Francisco, CA, USA), as well as a Leap Motion Controller™ (Leap Motion Inc., San Francisco, CA, USA), were employed. In both cases, the SDKs (Software Development Kits) were installed in Unity3D for the correct operation.
Once the Virtual Reality environment was developed, a procedure of test and debug was carried out. This task let us improve possible mistakes in the function and operation of the objects.
3.2. Training and Test
A total of 20 volunteer students were included to test the Virtual Reality environment. As a first step, the teacher trained the students to show them the principal functions and operations of the application as well as the operation mode using Oculus Rift S or Leap Motion Controller™, Leap Motion Inc., San Francisco, CA, USA. This process was carried out with the hypothesis that students had minimal knowledge of these technologies. The students carried out tests first using the Oculus Rift S and later using the Leap Motion Controller™ with a HD display.
After tests were performed, the students were classified into three groups according to the previous theoretical and practical knowledge of four-stroke engines: (a) absence of knowledge, (b) only theoretical, (c) theoretical and practical. The quiz included items to assess: the immersive experience, the graphic quality of the 3D elements, as a learning tool for the main elements of the four-stroke engine as a virtual tool for the assembly and disassembly, on the ease of manipulating the elements inside the Virtual Laboratory, and if they presented any degree of disorientation after use. In addition, at the end of the quiz, a blank space was included to receive additional feedback through suggestions and/or comments about the experience with the Virtual Reality environment application. A Likert scale was used to choose one of the following options for each item: very high, high, average, low and very low. Finally, to assess the reliability of this quiz, Cronbach’s alpha coefficient was used.
4. Results
In this section we present the Virtual Reality Laboratory for engineering students’ training which has been developed. When the application starts, it shows in the main scene the worktable with all the parts of the four-stroke engine, as we can see in
Figure 7.
Here, the student can interact with each piece analyzing its operation and the correct position inside the engine. As we mentioned previously, this interaction can be fully immersive using the Oculus Rift S or partially immersive using the Leap Motion Controller™. A test with six different items was designed and applied to 20 students (
n = 20) who evaluated the use of the Virtual Laboratory for assembling the main parts of a four-stroke engine using both the Oculus Rift S and Leap Motion Controller™. However, what is interesting is to the classification of the students participating in the evaluation into three groups: students without prior knowledge about the operation of the four-stroke combustion engine (neither practical nor theoretical), students with prior theoretical knowledge, and students with previous studies as technicians in automotive systems.
Figure 8 shows the distribution graphic of students’ profiles who participated in the test.
Test results applied to participants are shown in
Figure 9,
Figure 10,
Figure 11,
Figure 12,
Figure 13,
Figure 14. Students (
n = 20) evaluated the usability of immersive learning virtual applications to understand the main parts, the assembly, animation, and operation of a four-stroke engine, as well as the additional information of each element. The participants evaluated were chosen between “Very High”, “High”, “Average”, “Low”, and “Very Low” options.
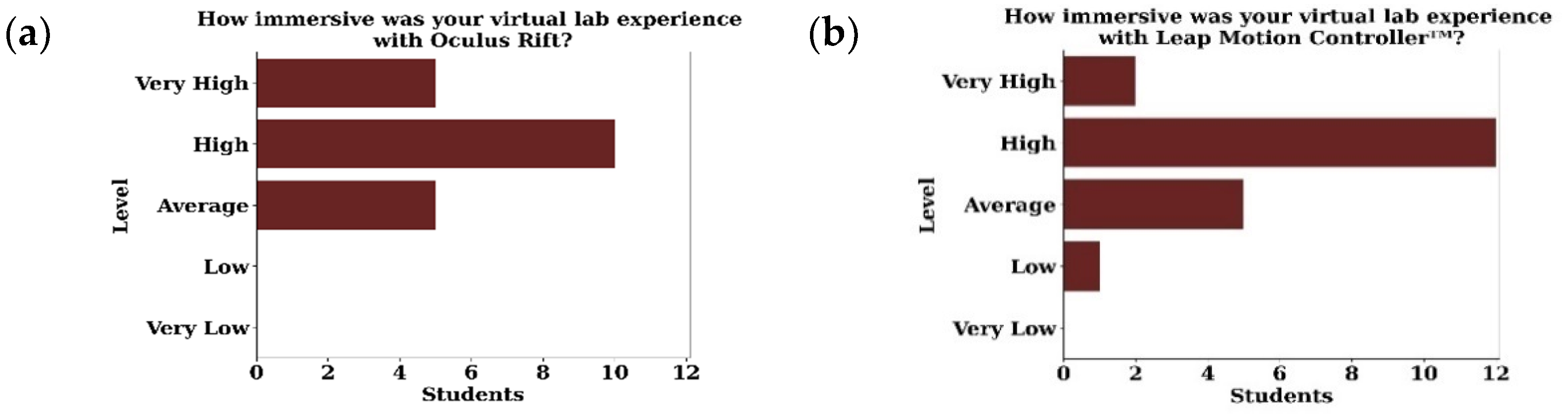
In
Figure 9 the immersive experience of the Virtual Laboratory was evaluated, having 5 “Very High” ratings for the Oculus Rift S compared to 2 for the Leap Motion Controller™, having a higher frequency of “High” rating in both cases. However, it is noted that the Leap Motion Controller™ presented a “Low” rating, which means that the best and highest ratings were obtained by the Oculus Rift S, namely, students that participated in the test think that the immersive experience of the Virtual Laboratory is better through the Oculus Rift S.
Figure 10 evaluated the Virtual Laboratory as a learning tool of a four-stroke engine’s basic elements. The highest qualifications (5 “Very High”, 11 “High”, and 4 “Average”) were for the Oculus Rift S, whilst the Leap Motion Controller™ had the “Average” qualification as the most selected answer, next to “Low”. In this case, the Oculus Rift S was evaluated as the best learning strategy in the Virtual Laboratory.
Results about the understanding of the assembly of the main parts of the four-stroke combustion engine are shown in
Figure 11, where it can be seen that both devices obtained high marks; however, the Virtual Laboratory using the Oculus Rift S had a higher frequency in the qualification of “Very High” compared with the Leap Motion Controller™ which was rated more frequently as “High”. In this item, there was no evaluation in the “Low” rate, so it is considered an application that helps to understand the engine assembly process.
Figure 12 shows the results about the simplicity to manipulate the main parts of the four-stroke engine in the Virtual Laboratory, where the Oculus Rift S was evaluated as “Very High” having a frequency rate of 10. On the other hand, the Leap Motion Controller™ was evaluated as “High” with a frequency rate of 12. Therefore, in both cases, it is considered that the manipulation is easy and suitable for the surveyed students.
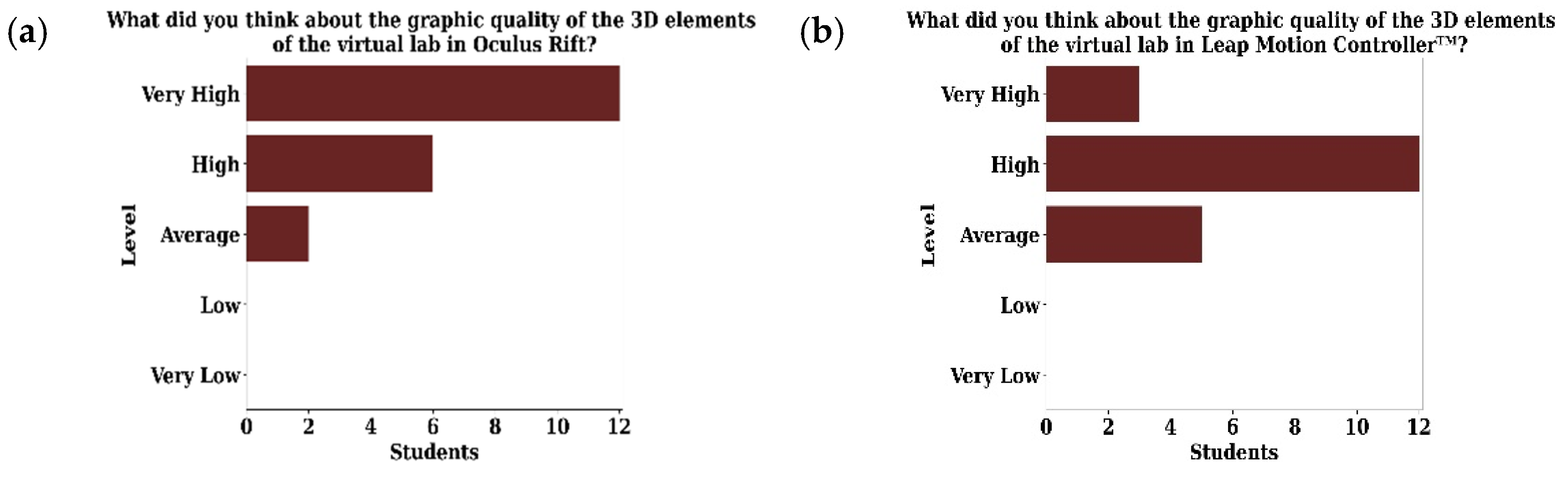
The graphic quality of the 3D elements of the Virtual Laboratory was evaluated as “Very High” with a frequency of 12 in the Oculus Rift S, and at the same frequency in the Leap Motion Controller™ but in the “High” rating. For both devices, this is a high rating in terms of graphic quality, and is best appreciated in the case of the Oculus Rift S. Results are shown in
Figure 13.
Finally, the test assessed the feelings of motion sickness evaluate the grade of disorientation that the use of this kind of device could cause in some people after using the Virtual Laboratory. Results shown in
Figure 14, and indicate that the frequency of “Low”, and “Very Low” rates are higher in the Leap Motion Controller™ comparing to the Oculus Rift S, where students evaluate with a “High” rating having a frequency of 6, and there is one case of rating as a “Very High”, which is remarkably common for users without previous experience with this device that is highly immersive.
Regarding the descriptive statistics of these questionnaires, this information is presented for the virtual experience in the Oculus Rift S and for the Leap Motion Controller™ in
Table 2 and
Table 3, respectively. The tables include the mean values, the standard deviation (SD), and the coefficient of variation (CV). Considering the values of the variation coefficient that are between 0.15 and 0.26, the variation is low and the dispersion of the data around the mean is low.
Among the indicators evaluated through the questionnaire to the students are immersion, application as a learning tool, manipulability, the graphic quality of the 3D elements, and the disorientation that the device could have caused, either using the Oculus Rift S or the Leap Motion Controller™. The descriptive statistics show that the Oculus Rift S offers users greater immersion, and is considered a better learning tool for the basic elements that make up a four-stroke engine, with greater manipulation and better graphic quality of the 3D elements, but greater disorientation when using the headset compared to the Leap Motion Controller™, which was evaluated with a lower score in all aspects considered to evaluate this Virtual Automotive Laboratory.
5. Discussion
In fact, VR is good enough for different application areas but, in general, the principal idea is to have the opportunity to increase the necessary skills depending on the application area [
14,
23,
24,
25,
26,
27]. It is possible to observe that since the year 2010, VR implementation has increased, not only in industry but also in school laboratories, in order to involve students in the emergent technology and prepare them for the industry exigences; it shows a substantial improvement in learning productivity, which has allowed increases in creativity, innovation, communication and teamwork [
39]. Owing to the fact that Automotive Industry is one of the principal areas where this technology is implemented [
40], we have developed a VR application that allows the user to assemble and disassemble the principal pieces of a four-stroke engine in Virtual Reality, using as a sensor the Leap Motion Controller™ or theOculus Rift S.
Most of the users subjected to several Virtual Reality experiences have positive opinions about VR’s importance in teaching due to it is easy to use, and the way it improves understanding and analysis of teaching materials [
13,
20,
21,
27,
38]. Hence, this project allows students to achieve active learning and put into practice their knowledge about the design, assembly, and disassembly of a four-stroke engine, where interactivity, realism, and educational purposes were some of the most important features to highlight.
Similar labs for educational and training in the automotive field have been proposed for different workgroups, Makarova et al. [
14] developed a laboratory focus on the process of balancing the wheels of a vehicle, where students must learn to balance the tires of a car correctly and accurately. In this case, HTC Vive headset(HTC Corp., New Taipei, Taiwan) and Unreal Engine 4 Software (Epic MegaGames, Cary, USA) were used. Quevedo et al. [
47] developed an automotive workshop for identification and assembly of an engine, and also they used a HTC Vive headset and Unity3D Software for the environment. However, in both cases, successful results are described in terms of the time to make the activities, and evidence of the user’s experience about the learning and VR environment was not reported.
In our research the evaluated items and the qualifications, obtained both in the Oculus Rift S and Leap Motion Controller™, were positive in all areas for didactic purposes of this Virtual Laboratory. For the evaluation and acceptance with the students as an immersive teaching-learning virtual didactic strategy, the Oculus Rift S is the platform that presents the best evaluation (“High”) in terms of the graphic quality of the 3D elements, manipulability, immersion, and understanding about the assembly of the four-stroke engine and learning of the main elements thereof, as well as disorientation afterwards its use. These results coincide with earlier similar studies in which virtually trained participants improved their abilities for assembly of the vehicle center console [
48]. In the case of the Leap Motion Controller™, it presents “High” qualifications more frequently in the areas of the graphic quality of the 3D elements, manipulability, immersion, and understanding about the assembly of the four-stroke engine and learning of its main elements, as well as ratings of “Low” for disorientation after use; this is attributed to the fact that the Leap Motion Controller™ device is semi-immersive, with the user being able to retain visualization of the real environment at all times. In general, the applications focused on automotive systems are limited to VR headset hardware and are not scalable for operation with hand-tracking systems such as the Leap Motion Controller™. Although VR headsets such as Oculus Rift S, HTC Vive, among others, allow a fully immersive experience, the Leap Motion Controller can represent a low-cost implementation of our VR environment. In fact, several studies in other fields have reported the development of applications using the Leap Motion Controller
TM with favorable results at low cost [
49,
50].
Suggestions and comments were recorded for the Virtual Laboratory in both devices, highlighting the comments on the immersion and graphic quality of the application in the case of the Oculus Rift S and for the case of the Leap Motion Controller™. Comments about its portability and ease of use were highlighted for the Leap Motion Controller™, as a more affordable option. The expressions of the students when putting on the Oculus Rift S are encompassed in amazement in terms of the similarity of the stage concerning the real laboratory and in terms of the immersion and freedom of movement within the virtual stage; this last aspect is the limitation with respect to the Leap Motion Controller™, since the field of action of the virtual hands is limited to the location of the infrared sensors of the Leap Motion Controller™. The case of students who became disoriented when putting on the Virtual Reality glasses was also presented; they commented that they had never had an experience with this type of glasses before, but gradually they became used to the virtual environment and had no problem using the application. With the Leap Motion Controller™, only one student did not tolerate the immersive experience of the virtual environment using the glasses and preferred to use the Leap Motion Controller™, with which he felt more comfortable. In the case of students who already had some experience with Virtual Reality glasses, their use was more natural from the beginning. About this situation, Homen Pavlin, M., and Sužnjević, M. also think that this could be probably due to the fact that only a fraction of students are familiar with VR devices [
38]. In this sense, a deep analysis in the field of spatial cognition could help to learn more about the dependence between the virtual environments and the user’s cognitive processing [
51,
52].
A very important factor to consider when developing VR applications is locomotion techniques; Boletsis and Cedergren [
51] show the typology of VR locomotion prevalent techniques, considering the interaction type, VR motion type, VR interaction space, VR locomotion types, and prevalent techniques. In the automotive field, these types of factors have not been reported within the VR applications developed. In our Virtual Reality application, the physical interaction type was used, VR motion type was continuous, VR interaction space was open, VR locomotion type was motion-based, and the prevalent locomotion technique was walking in place. We used joysticks to interact with entities or objects in the virtual environment through the avatar of the user’s hands. In the reported works on automotive VR applications, the effects of locomotion and dimensionality in the design of the applications have not been evaluated; in this sense, a field of opportunity is opened to evaluate the effects of the type of locomotion with dimensionality and its impact on the effectiveness of the physical activity carried out by the user when assembling and disassembling an engine, as well as on the learning of the users who make use of these Virtual Reality applications, all of this in order to reach the best outcomes.
In our Virtual Laboratory, we intend to add new modules such as the powertrain module and the suspension, steering, and brake modules. However, it is necessary to design and validate an instrument that allows us to carry out tests to define the type of artificial locomotion that will be adequate to move within the stage; according to the work undertaken by Keil et al. [
52], it is important to evaluate the effects of Virtual Reality locomotion techniques on distance estimations and define whether for this virtual automotive application, artificial locomotion by teleportation or joystick could be more effective and attractive to move between the modules of the Virtual Laboratory. It is important to consider the effect that this type of artificial locomotion could generate in the user, as well as including the evaluation of the dimensionality effect, especially for modules that require greater precision in the type of interaction, considering the powertrain, suspension and brake modules.
Another aspect that is relevant when implementing Virtual Reality applications is the continuous monitoring and feedback of the use of the application through Big Data Analysis [
53], which would allow us to establish use objectives with users and have internal goals and indicators for the expansion of this project, through the design, development, and implementation of new modules, such as the powertrain, suspension, and brake modules, also considering that in this first stage of the project, it was considered to use the factory configuration of the Oculus h Rift S, and have the natural scale of both the engine and the elements of the stage to try to avoid dimensionality problems in terms of virtual objects that are manipulated using the controllers in this engineering application. It is important to consider that in the case of users who had their first experience using the Oculus Rift S, there was disorientation and a longer training time was necessary before use of the application, alternating with breaks [
48], and it was during this training that the virtual interaction through the avatar of the hands that manipulate the elements of the four-stroke engine, via the controllers, worked more naturally.
6. Conclusions
This paper shows the development and evaluation of the Virtual Reality application that presents in an interactive and immersive way, with the help of the lenses and controls of the Oculus Rift S and Leap Motion Controller™, to learn about the operation of the four-stroke engine through animation and the assembly and disassembly of its main pieces. Test results, reflected in the questionnaires applied to the students who used the Virtual Laboratory, were favorable, and the comments made when using both devices were very positive, demonstrating that the purpose for which the immersive Virtual Reality application was developed fulfills its target. Therefore, we can conclude that this application provides users with a more immersive experience, especially in the case of virtual interaction with the help of the Oculus Rift S, which allows the user to move with greater freedom within the virtual stage and the physical space, in which the way that virtual hands of the student interact through the controls of the Virtual Reality glasses with the 3D virtual models is not limited, as it is in the case of the Leap Motion Controller™, which is limited by the field of vision of the infrared sensors. This virtual application aims to familiarize the student with what the main parts of a four-stroke engine are, how they work, and how they are assembled and disassembled; it is also interactive, since, if the student wants to learn more about each engine part, they can display additional information for the selected part. This application has an interactive tutorial and allows the student to have an immersive practice in a virtual setting similar to the automotive workshop, where the practice is usually carried out in person. In the case of schools that do not have equipped workshops for each student to carry out the practice, this application allows them to experiment in a more immersive way and also allows them to have practice prior to visiting the automotive workshop to carry out a face-to-face practice with a four-stroke engine. This application can be scaled to have more modules within the Virtual Laboratory.
The advance in the development of new technologies has enormous potential in the field of education and its links with Industry 4.0. We learn more from hands-on experiences than from traditional classes and frequently referenced two-dimensional materials. Education must gradually adapt to the health conditions that we are experiencing due to the pandemic caused by COVID-19 to improve and facilitate student learning and ensure their adaptation to the work environment. The development and implementation of these virtual immersive teaching-learning tools in the academic training of automotive engineering students will allow them to be profiled towards what they will find in their professional performance at an industrial level, where Virtual Reality plays a very important role in design, autonomous cars, training, and driving.



 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}