
Robust Design of Power System Stabilizers Using Improved Harris Hawk Optimizer for Interconnected Power System



 and
and 
Abstract
:1. Introduction
2. Problem Statement and Modeling
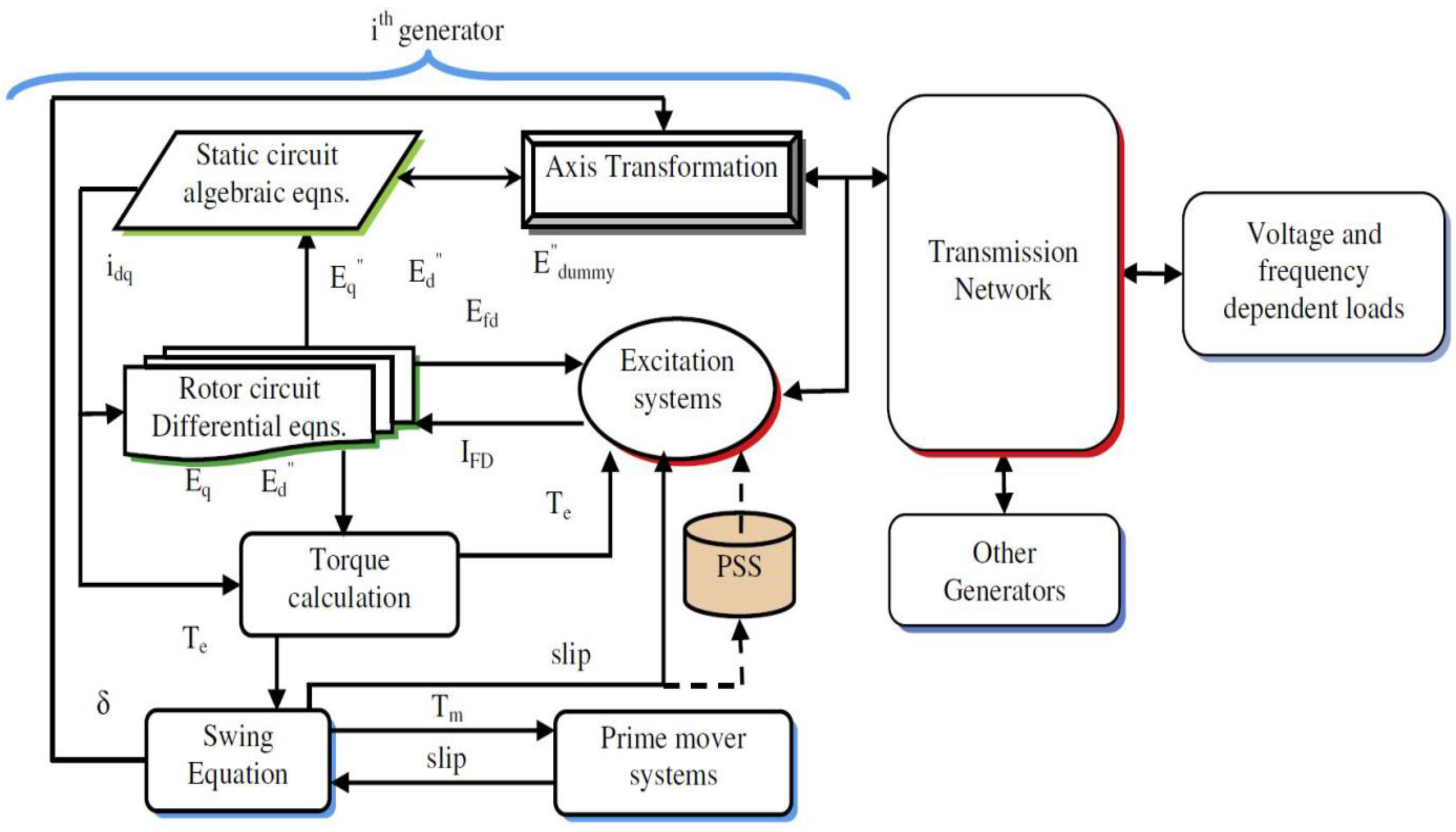
2.1. Power System Modeling
2.2. System under Study
2.3. Power System Stabilizer
2.4. Problem Formulation and the Objective Function
3. Proposed Algorithm and Solving Methodology
3.1. Harris Hawks Optimizer
3.1.1. Soft Besiege
3.1.2. Hard Besiege
3.1.3. Soft Besiege with Progressive Rapid Dive
3.1.4. Hard Besiege with Progressive Rapid Dive
3.2. Chaotic Maps
Chaotic Harris Hawk’s Optimizer
4. Results and Discussions
4.1. Solving the Benchmark Problems
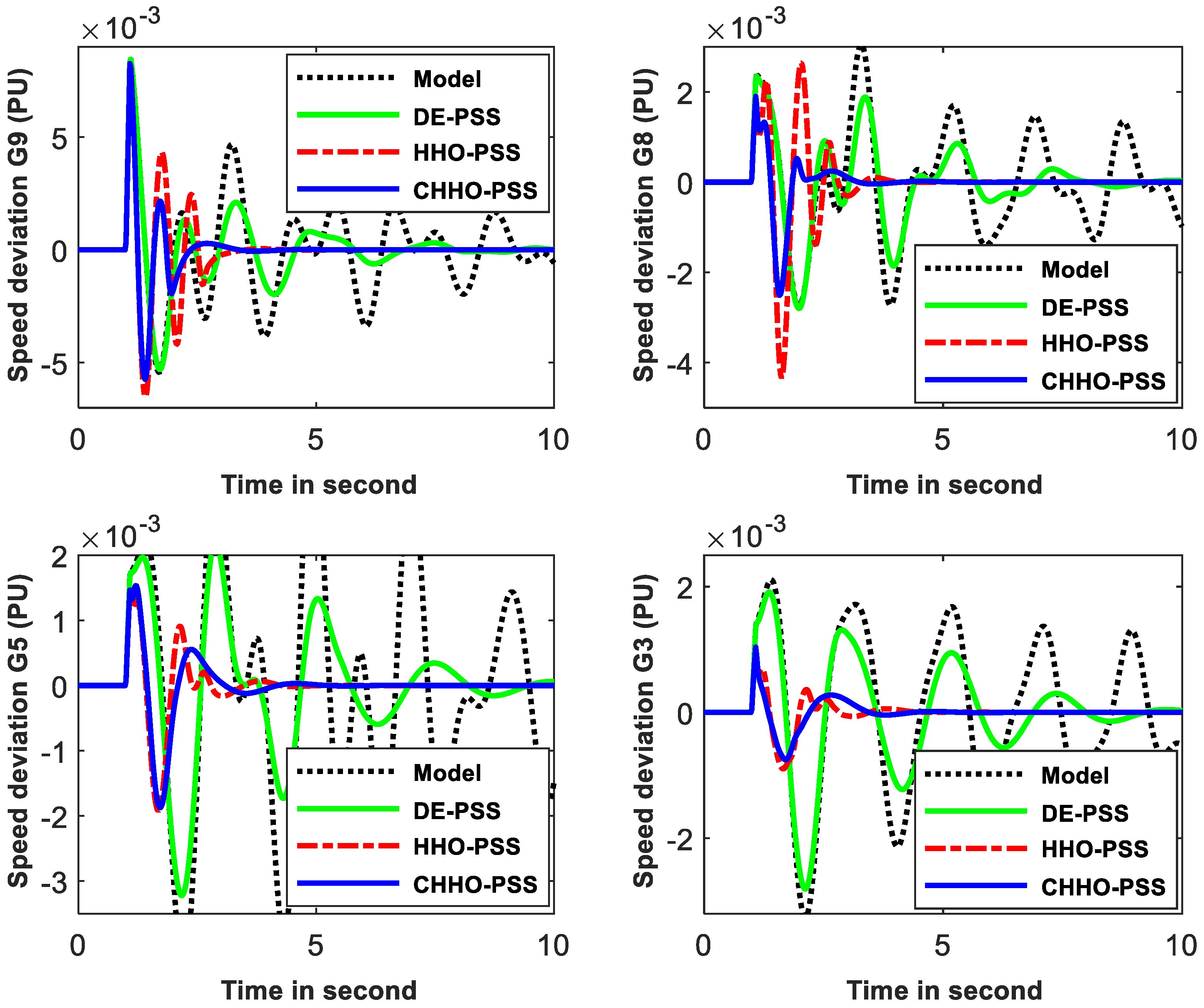
4.2. Solving the Power System Stability Problem
5. Concluding Remarks and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shafiullah, M.; Rana, M.J.; Alam, M.S.; Abido, M.A. Online tuning of power system stabilizer employing genetic programming for stability enhancement. J. Electr. Syst. Inf. Technol. 2018, 5, 287–299. [Google Scholar] [CrossRef]
- Hassan, L.H.; Moghavvemi, M.; Almurib, H.; Muttaqi, K.; Ganapathy, V.G. Optimization of power system stabilizers using participation factor and genetic algorithm. Int. J. Electr. Power Energy Syst. 2014, 55, 668–679. [Google Scholar] [CrossRef]
- Benasla, M.; Denaï, M.; Liang, J.; Allaoui, T.; Brahami, M. Performance of wide-area power system stabilizers during major system upsets: Investigation and proposal of solutions. Electr. Eng. 2021, 103, 1417–1431. [Google Scholar] [CrossRef]
- Zhang, Y.; Malik, O.P.; Hope, G.S.; Chen, G.P. Application of an inverse input/output mapped ANN as a power system stabilizer. IEEE Trans. Energy Convers. 1994, 9, 433–441. [Google Scholar] [CrossRef]
- He, J.; Malik, O.P. An adaptive power system stabilizer based on recurrent neural networks. IEEE Trans. Energy Convers. 1997, 12, 413–418. [Google Scholar] [CrossRef]
- Gupta, A.; Gurrala, G.; Sastry, P.S. An Online Power System Stability Monitoring System Using Convolutional Neural Networks. IEEE Trans. Power Syst. 2018, 34, 864–872. [Google Scholar] [CrossRef]
- Al-Duwaish, H.N.; Al-Hamouz, Z.M. A neural network based adaptive sliding mode controller: Application to a power system stabilizer. Energy Convers. Manag. 2011, 52, 1533–1538. [Google Scholar] [CrossRef]
- El-Zonkoly, A.; Khalil, A.; Ahmied, N. Optimal tunning of lead-lag and fuzzy logic power system stabilizers using particle swarm optimization. Expert Syst. Appl. 2009, 36, 2097–2106. [Google Scholar] [CrossRef]
- Ghasemi, A.; Shayeghi, H.; Alkhatib, H. Robust design of multimachine power system stabilizers using fuzzy gravitational search algorithm. Int. J. Electr. Power Energy Syst. 2013, 51, 190–200. [Google Scholar] [CrossRef]
- Saoudi, K.; Harmas, M. Enhanced design of an indirect adaptive fuzzy sliding mode power system stabilizer for multi-machine power systems. Int. J. Electr. Power Energy Syst. 2014, 54, 425–431. [Google Scholar] [CrossRef]
- Nechadi, E.; Harmas, M.; Hamzaoui, A.; Essounbouli, N. A new robust adaptive fuzzy sliding mode power system stabilizer. Int. J. Electr. Power Energy Syst. 2012, 42, 1–7. [Google Scholar] [CrossRef]
- Chaturvedi, D.K.; Malik, O.P. Neurofuzzy Power System Stabilizer. IEEE Trans. Energy Convers. 2008, 23, 887–894. [Google Scholar] [CrossRef]
- Bhati, P.; Gupta, R. Robust fuzzy logic power system stabilizer based on evolution and learning. Int. J. Electr. Power Energy Syst. 2013, 53, 357–366. [Google Scholar] [CrossRef]
- Jebali, M.; Kahouli, O.; Abdallah, H.H. Optimizing PSS parameters for a multi-machine power system using genetic algorithm and neural network techniques. Int. J. Adv. Manuf. Technol. 2016, 90, 2669–2688. [Google Scholar] [CrossRef]
- Farah, A.; Guesmi, T.; Abdallah, H.H.; Ouali, A. A novel chaotic teaching–learning-based optimization algorithm for multi-machine power system stabilizers design problem. Int. J. Electr. Power Energy Syst. 2016, 77, 197–209. [Google Scholar] [CrossRef]
- Mohammadi, M.; Ghadimi, N. Optimal location and optimized parameters for robust power system stabilizer using honeybee mating optimization. Int. Trans. Elect. Energy Syst. 2015, 21, 242–258. [Google Scholar] [CrossRef]
- Chitara, D.; Swarnkar, A.; Gupta, N.; Niazi, K.; Bansal, R. Optimal Tuning of Multimachine Power System Stabilizer using Cuckoo Search Algorithm. IFAC-PapersOnLine 2015, 48, 143–148. [Google Scholar] [CrossRef]
- Wang, D.; Ma, N.; Wei, M.; Liu, Y. Parameters tuning of power system stabilizer PSS4B using hybrid particle swarm optimization algorithm. Int. Trans. Elect. Energy Syst. 2018, 28, e2598. [Google Scholar] [CrossRef]
- Dasu, B.; Sivakumar, M.; Rao, R.S. Design of robust modified power system stabilizer for dynamic stability improvement using Particle Swarm Optimization technique. Ain Shams Eng. J. 2019, 10, 769–783. [Google Scholar] [CrossRef]
- Shayeghi, H.; Ghasemi, A. A multi objective vector evaluated improved honey bee mating optimization for optimal and robust design of power system stabilizers. Int. J. Electr. Power Energy Syst. 2014, 62, 630–645. [Google Scholar] [CrossRef]
- Jordehi, A.R. Optimal setting of TCSCs in power systems using teaching–learning-based optimisation algorithm. Neural Comput. Appl. 2014, 26, 1249–1256. [Google Scholar] [CrossRef]
- Sabo, A.; Wahab, N.I.A.; Othman, M.L.; Jaffar, M.Z.A.M.; Beiranvand, H. Optimal design of power system stabilizer for multimachine power system using farmland fertility algorithm. Int. Trans. Electr. Energy Syst. 2020, 30, e12657. [Google Scholar] [CrossRef]
- Dasu, B.; Sivakumar, M.; Srinivasarao, R. Interconnected multi-machine power system stabilizer design using whale optimization algorithm. Prot. Control. Mod. Power Syst. 2019, 4, 2. [Google Scholar] [CrossRef]
- Sambariya, D.; Prasad, R. Robust tuning of power system stabilizer for small signal stability enhancement using metaheuristic bat algorithm. Int. J. Electr. Power Energy Syst. 2014, 61, 229–238. [Google Scholar] [CrossRef]
- Ali, E. Optimization of Power System Stabilizers using BAT search algorithm. Int. J. Electr. Power Energy Syst. 2014, 61, 683–690. [Google Scholar] [CrossRef]
- Chaib, L.; Choucha, A.; Arif, S. Optimal design and tuning of novel fractional order PID power system stabilizer using a new metaheuristic Bat algorithm. Ain Shams Eng. J. 2017, 8, 113–125. [Google Scholar] [CrossRef] [Green Version]
- Tolstolesova, L.A.; Yumanova, N.N.; Mazikova, E.V.; Glukhikh, I.N.; Vorobieva, M.S. Realization of PPP projects in the sector of energetics as a condition of a sustainable development of macroregions. Entrep. Sustain. Issues 2019, 7, 263–277. [Google Scholar] [CrossRef]
- Plėta, T.; Tvaronavičienė, M.; Della Casa, S.; Agafonov, K. Cyber-attacks to critical energy infrastructure and management issues: Overview of selected cases. Insights Into Reg. Dev. 2020, 2, 703–715. [Google Scholar] [CrossRef]
- Mondal, D.; Chakrabarti, A.; Sengupta, A. Power System Small Signal Stability Analysis and Control, 2nd ed.; Academic Press: Cambridge, MA, USA, 9 March 2020; ISBN -10. [Google Scholar]
- Rahmatian, M.; Seyedtabaii, S. Multi-machine optimal power system stabilizers design based on system stability and nonlinearity indices using Hyper-Spherical Search method. Int. J. Electr. Power Energy Syst. 2018, 105, 729–740. [Google Scholar] [CrossRef]
- Islam, N.N.; Hannan, M.A.; Shareef, H.; Mohamed, A. An application of backtracking search algorithm in designing power system stabilizers for large multi-machine system. Neurocomputing 2017, 237, 175–184. [Google Scholar] [CrossRef]
- Butti, D.; Mangipudi, S.K.; Rayapudi, S.R. An improved whale optimization algorithm for the design of multi-machine power system stabilizer. Int. Trans. Electr. Energy Syst. 2020, 30, e12314. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Futur. Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Abouhawwash, M.; Nam, Y.; El-Fergany, A. Recent Meta-Heuristic Algorithms with a Novel Premature Covergence Method for Determining the Parameters of PV Cells and Modules. Electronics 2021, 10, 1846. [Google Scholar] [CrossRef]
- Bentouati, B.; Javaid, M.S.; Bouchekara, H.R.E.H.; El-Fergany, A.A. Optimizing performance attributes of electric power systems using chaotic salp swarm optimizer. Int. J. Manag. Sci. Eng. Manag. 2019, 15, 165–175. [Google Scholar] [CrossRef]
- Ewees, A.A.; el Aziz, M.A.; Hassanien, A.E. Chaotic multi-verse optimizer-based feature selection. Neural Comput. Appl. 2017, 31, 991–1006. [Google Scholar] [CrossRef]
- Sayed, G.I.; Tharwat, A.; Hassanien, A.E. Chaotic dragonfly algorithm: An improved metaheuristic algorithm for feature selection. Appl. Intell. 2018, 49, 188–205. [Google Scholar] [CrossRef]
- Abualigah, L.; Yousri, D.; Elaziz, M.A.; Ewees, A.A.; Al-Qaness, M.A.; Gandomi, A.H. Aquila Optimizer: A novel meta-heuristic optimization algorithm. Comput. Ind. Eng. 2021, 157, e107250. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; El-Fergany, A.; Chakrabortty, R.K.; Ryan, M.J. Adaptive and Efficient optimization model for optimal parameters of proton exchange membrane fuel cells: A comprehensive analysis. Energy 2021, 233, e121096. [Google Scholar] [CrossRef]
- Ghoneim, S.; Kotb, M.; Hasanien, H.; Alharthi, M.; El-Fergany, A. Cost Minimizations and Performance Enhancements of Power Systems Using Spherical Prune Differential Evolution Algorithm Including Modal Analysis. Sustainability 2021, 13, 8113. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Formula | D | Range |
|---|---|---|---|
| F1 | 30 | [100, 100] | |
| F2 | 30 | [10, 10] | |
| F3 | 30 | [100, 100] | |
| F4 | 30 | [100, 100] | |
| F5 | 30 | [30, 30] | |
| F6 | 30 | [100, 100] | |
| F7 | 30 | [1.28, 1.28] |
| Chaotic Map | Gauss/Mouse | Iterative | Logistic | Piecewise |
|---|---|---|---|---|
| Abbreviation | CHHO-1 | CHHO-2 | CHHO-3 | CHHO-4 |
| Chaotic Map | Tent | Chebyshev Map | Singer | |
| Abbreviation | CHHO-5 | CHHO-6 | CHHO-7 |
| Fun No. | Measure | Comparative Methods | ||||
|---|---|---|---|---|---|---|
| HHO | CHHO-1 | CHHO-2 | CHHO-3 | CHHO-4 | ||
| F1 | Worst | 5.9512E-98 | 6.2863E-99 | 2.0103E-101 | 1.4375E-96 | 1.2982E-98 |
| Average | 2.1231E-99 | 2.3526E-100 | 6.7031E-103 | 5.0425E-98 | 4.9799E-100 | |
| Best | 7.1842E-116 | 1.6451E-117 | 2.1923E-116 | 3.5854E-115 | 6.9534E-117 | |
| STD | 1.0866E-98 | 1.1470E-99 | 3.6703E-102 | 2.6218E-97 | 2.3706E-99 | |
| F2 | Worst | 1.1163E-51 | 1.0805E-50 | 3.2310E-51 | 2.9698E-52 | 1.1735E-50 |
| Average | 4.5206E-53 | 3.6432E-52 | 1.2862E-52 | 1.4932E-53 | 9.3781E-52 | |
| Best | 5.7801E-61 | 1.1577E-61 | 1.2640E-61 | 8.5916E-60 | 2.1624E-61 | |
| STD | 2.0413E-52 | 1.9719E-51 | 5.9441E-52 | 5.6740E-53 | 2.9137E-51 | |
| F3 | Worst | 1.0396E-79 | 8.1627E-80 | 7.3443E-82 | 1.5567E-77 | 1.8161E-81 |
| Average | 3.6221E-81 | 2.7210E-81 | 2.4492E-83 | 5.1889E-79 | 6.0619E-83 | |
| Best | 1.7647E-101 | 2.0509E-106 | 1.7460E-102 | 6.6822E-103 | 2.7971E-105 | |
| STD | 1.8970E-80 | 1.4903E-80 | 1.3409E-82 | 2.842048E-78 | 3.3156E-82 | |
| F4 | Worst | 2.4929E-49 | 4.3522E-51 | 3.4972E-49 | 2.4458E-51 | 3.3407E-50 |
| Average | 9.4099E-51 | 3.2296E-52 | 1.7949E-50 | 1.8715E-52 | 1.5649E-51 | |
| Best | 2.5972E-61 | 1.8244E-58 | 6.3810E-60 | 8.2259E-59 | 2.1513E-59 | |
| STD | 4.5453E-50 | 8.6567E-52 | 7.0223E-50 | 5.1596E-52 | 6.2276E-51 | |
| F5 | Worst | 1.8347e-02 | 2.0060e-02 | 2.8406e-02 | 1.4052e-02 | 5.2828e-02 |
| Average | 5.4907e-03 | 4.9067e-03 | 5.4719e-03 | 3.3413e-03 | 4.8627e-03 | |
| Best | 1.1860E-05 | 7.7402E-06 | 2.1216E-05 | 5.3116E-06 | 2.5568E-06 | |
| STD | 4.8108e-03 | 6.6480e-03 | 6.6148e-03 | 4.0093e-03 | 1.0959e-02 | |
| F6 | Worst | 1.2227E-04 | 2.3521E-04 | 2.4992E-04 | 3.9409E-04 | 2.3173E-04 |
| Average | 4.0938E-05 | 5.0787E-05 | 5.0576E-05 | 5.8620E-05 | 4.4138E-05 | |
| Best | 6.9660E-07 | 3.1519E-07 | 2.3501E-07 | 4.2052E-07 | 1.2151E-08 | |
| STD | 3.7858E-05 | 6.1788E-05 | 6.4697E-05 | 9.3447E-05 | 6.1991E-05 | |
| F7 | Worst | 5.8867E-04 | 5.4054E-04 | 3.7393E-04 | 3.7813E-04 | 1.8347E-04 |
| Average | 9.8557E-05 | 8.9911E-05 | 9.4252E-05 | 7.0464E-05 | 7.0338E-05 | |
| Best | 4.4691E-06 | 3.6960E-07 | 4.2456E-06 | 2.5632E-06 | 1.6094E-06 | |
| STD | 1.1274E-04 | 1.1106E-04 | 8.3870E-05 | 7.3039E-05 | 5.4223E-05 | |
| Fun No. | Measure | Comparative Methods | ||||
| CHHO-5 | CHHO-6 | CHHO-7 | DE | |||
| F1 | Worst | 6.7354E-99 | 2.6433E-100 | 8.2943E-91 | 4.4386E-25 | |
| Average | 2.2975E-100 | 1.3653E-101 | 2.7648E-92 | 6.0132E-26 | ||
| Best | 1.0114E-118 | 8.8329E-120 | 1.6735E-116 | 7.6612E-29 | ||
| STD | 1.2289E-99 | 5.2446E-101 | 1.5143E-91 | 1.0144E-25 | ||
| F2 | Worst | 3.9850E-51 | 4.0036E-52 | 1.1014E-50 | 3.3423E-15 | |
| Average | 1.6746E-52 | 3.0616E-53 | 5.7821E-52 | 9.5648E-16 | ||
| Best | 1.0731E-59 | 1.9621E-61 | 6.4599E-62 | 1.5947E-16 | ||
| STD | 7.4429E-52 | 8.3276E-53 | 2.2698E-51 | 7.0237E-16 | ||
| F3 | Worst | 1.6772E-82 | 6.4230E-83 | 3.6351E-82 | 2.4213E+00 | |
| Average | 5.8498E-84 | 2.1699E-84 | 1.2361E-83 | 7.0300E-01 | ||
| Best | 5.2052E-105 | 1.3792E-105 | 1.0633E-106 | 6.9908E-02 | ||
| STD | 3.0604E-83 | 1.1722E-83 | 6.6335E-83 | 6.1012E-01 | ||
| F4 | Worst | 3.7611E-48 | 3.8207E-51 | 8.8826E-50 | 3.4902E+01 | |
| Average | 1.2607E-49 | 1.7452E-52 | 3.1797E-51 | 2.2957E+01 | ||
| Best | 1.7699E-59 | 1.1496E-59 | 2.6430E-59 | 1.2265E+01 | ||
| STD | 6.8655E-49 | 7.0775E-52 | 1.6195E-50 | 6.0491E+00 | ||
| F5 | Worst | 4.1583e-02 | 2.9487e-02 | 1.5495e-02 | 2.8483e+01 | |
| Average | 4.6260e-03 | 4.6260e-03 | 3.8083e-03 | 9.0975e+00 | ||
| Best | 2.0791E-05 | 5.5753E-06 | 1.2397E-09 | 3.7867E-07 | ||
| STD | 8.0860e-03 | 6.5421e-03 | 3.9882e-03 | 1.0201e+01 | ||
| F6 | Worst | 2.3884E-04 | 1.8382E-04 | 2.0349E-04 | 3.4512E-2 | |
| Average | 3.9667E-05 | 4.5621E-05 | 4.4487E-05 | 7.3124E-2 | ||
| Best | 3.3941E-07 | 1.9629E-07 | 8.9470E-08 | 1.1468E-3 | ||
| STD | 5.5406E-05 | 5.3004E-05 | 5.2918E-05 | 8.2926E-2 | ||
| F7 | Worst | 4.5400E-04 | 3.4588E-04 | 5.0626E-04 | 9.7697E-03 | |
| Average | 9.7567E-05 | 8.4010E-05 | 7.6508E-05 | 4.1090E-03 | ||
| Best | 2.8635E-06 | 6.0441E-06 | 2.5048E-06 | 1.2936E-03 | ||
| STD | 1.0110E-04 | 8.9123E-05 | 9.2046E-05 | 1.8296E-03 | ||
| Operating Condition 1 | Operating Condition 2 |
|---|---|
| Nominal active power | Total active power increasing by 12% |
| Nominal reactive power | Total reactive power increasing by 10% |
| Methods | Parameter | Generators (1 → 5) | ||||
|---|---|---|---|---|---|---|
| G1 | G2 | G3 | G4 | G5 | ||
| CHHO | 43.4310 | 14.2737 | 37.7955 | 31.4291 | 7.9842 | |
| 0.4060 | 0.9068 | 0.7550 | 0.9514 | 0.6082 | ||
| 0.3832 | 0.8726 | 0.7552 | 0.3045 | 0.6443 | ||
| 0.9012 | 0.9216 | 0.8028 | 0.2667 | 0.4596 | ||
| 0.8028 | 0.5811 | 0.7651 | 0.6839 | 0.2440 | ||
| HHO | 57.5282 | 37.1416 | 61.9856 | 63.4233 | 29.6652 | |
| 1.5043 | 0.7014 | 0.7549 | 0.4732 | 1.0661 | ||
| 1.6216 | 0.7173 | 1.1082 | 0.8383 | 1.5622 | ||
| 0.5159 | 0.4590 | 0.8203 | 0.7823 | 0.8478 | ||
| 0.5871 | 0.6144 | 1.5961 | 1.3040 | 1.4983 | ||
| DE | 60.5909 | 74.2482 | 39.1043 | 36.8485 | 96.4407 | |
| 1.5587 | 1.7429 | 1.0596 | 1.4793 | 1.7632 | ||
| 0.0100 | 0.2594 | 0.0769 | 0.7508 | 0.0100 | ||
| 1.3167 | 1.8000 | 1.8000 | 1.5217 | 1.4877 | ||
| 0.1503 | 0.0100 | 0.0100 | 0.0100 | 0.3046 | ||
| Methods | Parameter | Generators (6 → 10) | ||||
| G6 | G7 | G8 | G9 | G10 | ||
| CHHO | 19.1182 | 10.3593 | 25.3833 | 28.9654 | 21.2603 | |
| 0.1737 | 0.8911 | 0.9673 | 0.8191 | 0.5594 | ||
| 0.6261 | 0.5999 | 0.8608 | 0.8438 | 0.4783 | ||
| 0.9334 | 0.8269 | 0.3875 | 0.7079 | 0.4624 | ||
| 0.4554 | 0.3653 | 0.7269 | 0.6510 | 0.3156 | ||
| HHO | 69.6979 | 77.4696 | 14.8654 | 47.4786 | 65.7820 | |
| 0.4262 | 0.3678 | 0.8822 | 0.6309 | 0.8029 | ||
| 1.6650 | 1.5090 | 1.3877 | 1.2049 | 1.1785 | ||
| 0.9562 | 0.7730 | 1.0435 | 0.5317 | 1.1891 | ||
| 0.7546 | 0.4548 | 1.3494 | 0.3721 | 0.7900 | ||
| DE | 24.1492 | 100.0000 | 16.5280 | 76.4606 | 97.8444 | |
| 1.8000 | 0.3468 | 1.4932 | 1.5531 | 1.0735 | ||
| 0.0100 | 0.0100 | 0.0100 | 0.0100 | 0.1508 | ||
| 1.8000 | 1.1243 | 0.7494 | 0.2000 | 0.5241 | ||
| 0.6028 | 0.9743 | 0.0822 | 0.0100 | 0.3192 | ||
| Generator | Algorithms | Ts (s) | Peak | IAE | ISE | ISE | ITAE | FD |
|---|---|---|---|---|---|---|---|---|
| G9 | CHHO | 2.9775 | 0.0083 | 0.1925 | 8.05E-4 | 2.0157 | 0.2968 | 2.0160 |
| HHO | 3.2979 | 0.0083 | 0.2876 | 0.0012 | 2.989 | 0.5111 | 2.2307 | |
| DE | 5.6727 | 0.0085 | 0.3646 | 0.0013 | 3.1324 | 0.925 | 4.6352 | |
| G8 | CHHO | 3.0501 | 0.0026 | 0.07 | 9.68E-5 | 0.2426 | 0.1176 | 2.2142 |
| HHO | 3.7309 | 0.0044 | 0.1531 | 3.25E-4 | 0.8145 | 0.2939 | 2.2963 | |
| DE | 6.6078 | 0.0031 | 0.2337 | 3.63E-4 | 0.9082 | 0.6571 | 4.7115 | |
| G5 | CHHO | 3.9285 | 0.0020 | 0.0765 | 8.83E-5 | 0.2211 | 0.1393 | 1.9250 |
| HHO | 4.0927 | 0.0020 | 0.0812 | 9.24E-5 | 0.2314 | 0.152 | 2.9314 | |
| DE | 7.5183 | 0.0035 | 0.3309 | 6.65E-4 | 1.6651 | 0.9871 | 3.8999 | |
| G3 | CHHO | 3.9123 | 9.37E-4 | 0.0347 | 1.56E-5 | 3.91E-2 | 6.80E-2 | 5.7327 |
| HHO | 4.2944 | 0.0011 | 0.0403 | 2.24E-5 | 5.61E-02 | 7.82E-2 | 6.2001 | |
| DE | 7.8745 | 0.0031 | 0.2551 | 4.16E-4 | 1.0416 | 0.7517 | 7.0259 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chaib, L.; Choucha, A.; Arif, S.; Zaini, H.G.; El-Fergany, A.; Ghoneim, S.S.M. Robust Design of Power System Stabilizers Using Improved Harris Hawk Optimizer for Interconnected Power System. Sustainability 2021, 13, 11776. https://0-doi-org.brum.beds.ac.uk/10.3390/su132111776
Chaib L, Choucha A, Arif S, Zaini HG, El-Fergany A, Ghoneim SSM. Robust Design of Power System Stabilizers Using Improved Harris Hawk Optimizer for Interconnected Power System. Sustainability. 2021; 13(21):11776. https://0-doi-org.brum.beds.ac.uk/10.3390/su132111776
Chicago/Turabian StyleChaib, Lakhdar, Abdelghani Choucha, Salem Arif, Hatim G. Zaini, Attia El-Fergany, and Sherif S. M. Ghoneim. 2021. "Robust Design of Power System Stabilizers Using Improved Harris Hawk Optimizer for Interconnected Power System" Sustainability 13, no. 21: 11776. https://0-doi-org.brum.beds.ac.uk/10.3390/su132111776