1. Introduction
Off-site construction (OSC) is a sustainable construction method in which parts of the structure are produced off-site and then transported to the construction site for erection [
1,
2]. OSC has many advantages for the improvement of productivity [
3], quality [
4], and safety [
5] of the built environment. Besides this, OSC brings environmental improvements to the construction industry [
6]. OSC could reduce greenhouse gas (GHG) emissions by 48% and 43% during the operation and construction phases, respectively [
7]. Furthermore, OSC could reduce construction waste compared with traditional construction [
8]. Consequently, OSC is adopted in both building and infrastructure projects. For instance, OSC is an efficient way to narrow the gap between the supply and demand of both public and private buildings [
9]. In addition, many transportation agencies prefer OSC to deliver infrastructure projects to mitigate the traffic interruption resulting from the traditional cast-in-situ method [
10].
Despite the benefits of OSC, its complexity and fragmentation require extensive planning from the project managers [
1,
11]. The need for extensive planning is one of the key barriers that hinder the wider adoption of OSC [
12]. For successful project delivery, the project manager has to make critical decisions while considering the dynamics and uncertainty of OSC projects [
13]. Some of these decisions are related to resource planning, such as the number of required crews and the on-site and off-site equipment [
14]. The rest are related to logistics aspects, such as the location of the storage yards and their capacities. These decisions should be made to deliver the project on time and within the allowable budget. This problem is called the time–cost trade-off problem (TCTP), which has been extensively addressed in the literature considering its different variants and has been solved using both exact and approximate optimization methods. Approximate methods are preferable because they efficiently handle complex projects with large networks in a reasonable computation time [
15]. Metaheuristics were widely used to solve single and multi-objective TCTP. The Genetic Algorithm (GA) [
16], Ant Colony Optimization (ACO) [
17], and Particle Swarm Optimization (PSO) [
18] were applied to solve single-objective TCTP. For multi-objective TCTP, researchers used dynamic programming [
19], multi-objective ACO [
20], non-dominated sorting genetic algorithm II (NSGA-II), multi-objective simulated annealing, and multi-objective PSO [
21]. Despite the contribution of these studies, their common limitations are: (1) The proposed models addressed the traditional cast-in-situ construction method. Hence, they do not fit with OSC projects characterized by a three-stage supply chain (i.e., production, logistics, and installation stages) [
22]. (2) The previous models failed to capture the complex interactions between the resources and activities of OSC projects. These complex interactions form queues inside the system, making the analytical methods impractical for the modelling of such queuing systems [
23]. (3) the previous models assumed that the activities’ durations and costs are deterministic without considering the uncertainty associated with these types of projects [
24].
In order to address these gaps, researchers resorted to Discrete-Event Simulation (DES) to capture the complexity and uncertainty of OSC projects without the need to develop sophisticated mathematical models. However, DES is not an optimization tool on its own; it can solely enable project planners to study the effect of the proposed resource planning and logistics decisions on the project duration, cost and productivity [
10]. In order to tackle this limitation, researchers tend to combine simulation and metaheuristics into one approach called “simulation-optimization (SO)”. Swisher et al. [
25] defined SO as a ‘‘structured approach to determine optimal input parameter values, where optimal is measured by a function of output variables—steady-state or transient—associated with a simulation model’’. Given this definition, the solution obtained from the SO approach is the values of the input parameters associated with the DES model. This solution’s performance is evaluated by the DES model. The metaheuristic algorithm uses the current solution and its evaluation to find a new set of input values [
26]. Therefore, different types of metaheuristics have been integrated with DES in the SO approach to solve multiple construction problems characterized by complexity and uncertainty.
Evolution-based metaheuristics are a subcategory of metaheuristics inspired by the laws of natural evolution. The advantage of these metaheuristics is that the new generation of solutions is created using the fittest solutions in the current generation, hence improving the solutions over the generations [
27]. Genetic Algorithms (GAs), which are the most popular evolution-based metaheuristics, have frequently been used in SO for different construction applications such as sewer pipeline installation [
28], earthmoving operations [
29], the production planning of precast components [
30], the planning of prefabricated building construction [
31], and bridge construction planning [
32].
Swarm Intelligence (SI) metaheuristics are another subcategory of metaheuristics. These metaheuristics are usually inspired by the social and hunting behaviours of colonies and swarms of animals in nature. According to Mirjalili et al. [
33], SI metaheuristics offer multiple advantages over evolution-based metaheuristics. Firstly, they retain the information associated with the search space over iterations, while evolution-based metaheuristics dispose the information of previous generations once a new generation is created. Secondly, they are generally easier to implement because they have fewer operators than the evolution-based metaheuristics (i.e., operators for crossover, mutation, elitism, etc.). Despite these advantages, SI metaheuristics have rarely been used in SO for construction applications. Examples of these applications are a concrete placement operation using PSO [
34], and the construction planning of bridge deck construction using ACO [
35] and PSO [
36]. Because of the introduction of PSO and ACO, SI metaheuristics have witnessed a dramatic development, leading to tens of metaheuristics that have potential over PSO and ACO, while most of them use a lower number of tuning parameters. Examples of such recent SI metaheuristics are the firefly algorithm (FA) [
37], grey wolf optimization (GWO) [
38], the whale optimization algorithm (WOA) [
39] and the salp swarm algorithm (SSA) [
40].
Given the above-mentioned preliminary review of the use of metaheuristics in SO in the construction domain, this study contributes to the literature by addressing three research questions that have not yet been addressed: (1) What is the status quo of the use of metaheuristics for SO in the construction research field? (2) What is the potential of the use of recent SI metaheuristics in SO to optimize the planning of OSC projects? (3) Which one among the selected SI metaheuristics has better performance in obtaining more optimal planning decisions for OSC? In order to address these questions, the metaheuristics used in the SO of construction applications are first reviewed using a systematic review. Secondly, a DES model of a bridge construction project using the OSC method is developed. Then, its optimization model is formulated by defining the decision variables, objective functions and constraints. Next, the developed model is integrated with the SI metaheuristics under study. In order to reduce the computation time of the SO runs, parallel computing and a variance reduction technique called common rand numbers (CRN) are used. After that, the developed models are applied to a case study. Finally, a comparative analysis between the SI metaheuristics under study is conducted using qualitative and quantitative measures. Following the recommendations of Sörensen [
41] and Juan et al. [
26] regarding the need to conduct comparative studies for SO, this study contributes by comparing the performance of recent SI metaheuristics in SO of OSC projects.
The rest of this study is organized as follows: SO applications in the construction field are reviewed in
Section 2. Secondly, the problem description and the formulation of the optimization model are discussed in
Section 3. Thirdly, the adopted SO approach, the DES modelling of an OSC project, and the five SI metaheuristics under study are illustrated and coded in
Section 4, including their parameter tuning. In addition,
Section 4 elaborates on the methods used to reduce the computation time, namely, the CRN method and parallel computing. After that, the developed simulation and optimization models are applied to a case study discussed in
Section 5. Finally, the analysis and discussion of the performance of the SI metaheuristics are provided in
Section 6 in terms of their convergence behaviour and statistical results, followed by conclusions in
Section 7.
2. Literature Review of Simulation-Optimization (SO) in the Construction Research Field
This section answers the first research question mentioned in the previous section by reviewing the SO applications in the construction research field. The specific aims are the identification of: (1) studies that adopted SO in the construction domain, (2) which simulation methods (e.g., DES, agent-based simulation (ABS), system dynamics (SD)) have been used in these studies, (3) which metaheuristics have been applied in these studies, (4) the construction applications addressed, and (5) whether these studies applied parallel computing or VRTs. These objectives can be applied using a systematic review method [
42,
43]. This method consists of two main steps: the extraction of related studies and their analysis [
44]. The first step starts by selecting a number of relevant keywords for the database search. The following search code was used in the Scopus database: (TITLE-ABS-KEY (“optimization”) AND TITLE-ABS-KEY (“construction”) OR TITLE-ABS-KEY (“infrastructure”) OR TITLE-ABS-KEY (“building”) AND TITLE-ABS-KEY (“simulation”) AND TITLE-ABS-KEY (“DES”) OR TITLE-ABS-KEY (“discrete”) OR TITLE-ABS-KEY (“continuous”) OR TITLE-ABS-KEY (“discrete-event”) OR TITLE-ABS-KEY (“system dynamic”) OR TITLE-ABS-KEY (“system dynamics”) OR TITLE-ABS-KEY (“SD”) OR TITLE-ABS-KEY (“agent”) OR TITLE-ABS-KEY (“multi-agent”) OR TITLE-ABS-KEY (“agent-based”) OR TITLE-ABS-KEY (“ABS”) OR TITLE-ABS-KEY (“ABM”)) AND (LIMIT-TO (DOCTYPE, “ar”)) AND (LIMIT-TO (LANGUAGE, “English”)) AND (EXCLUDE (SUBJAREA, “MATE”) OR EXCLUDE (SUBJAREA, “PHYS”) OR EXCLUDE (SUBJAREA, “EART”) OR EXCLUDE (SUBJAREA, “CHEM”) OR EXCLUDE (SUBJAREA, “CENG”) OR EXCLUDE (SUBJAREA, “BIOC”) OR EXCLUDE (SUBJAREA, “MEDI”) OR EXCLUDE (SUBJAREA, “PHAR”) OR EXCLUDE (SUBJAREA, “AGRI”) OR EXCLUDE (SUBJAREA, “NEUR”) OR EXCLUDE (SUBJAREA, “IMMU”) OR EXCLUDE (SUBJAREA, “HEAL”) OR EXCLUDE (SUBJAREA, “ARTS”) OR EXCLUDE (SUBJAREA, “NURS”) OR EXCLUDE (SUBJAREA, “PSYC”)). As of November 2021, using this code results in the identification of 745 studies, as shown in
Figure 1.
Figure 1 shows a common protocol used in the systematic review, called the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA), to screen the relevant studies [
45]. After checking the title and abstract of the retrieved studies, 637 studies were found to be irrelevant to the construction research field, namely the implementation stage of construction projects. Then, the full texts of the remaining studies (i.e., 745 – 637 = 108 studies) were evaluated, and 38 of them were found to be relevant. By checking the reference list and studies that cited each of the 38 studies, eight more relevant studies were detected, raising the number of related studies to 46, as shown in
Figure 1.
The second step of the adopted systematic review method is to evaluate the 46 relevant studies to identify the simulation methods and metaheuristics used, their applications, and the use of parallel computing and VRTs.
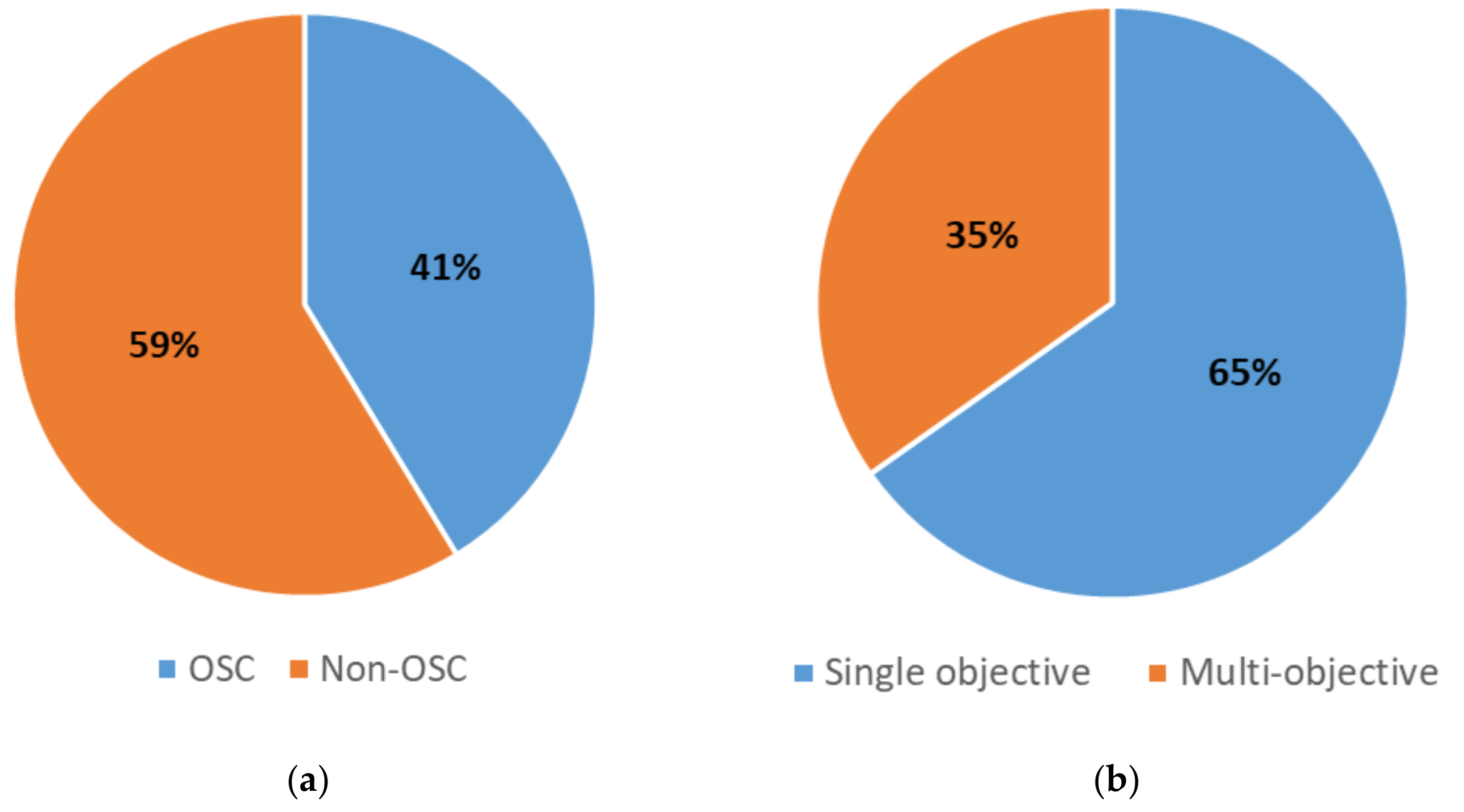
Figure 2 provides an overview of the classification of the 46 studies based on multiple criteria.
Figure 2a shows that most of these studies (59%) are related to the traditional construction method, while
Figure 2b shows that 65% of these studies addressed single optimization problems. Regarding the metaheuristics used in these studies,
Figure 2c shows that the majority of these studies used evolutionary-based metaheuristics (i.e., GA and evolutionary algorithms (EA)), while one-fifth of these studies adopted SI metaheuristics (i.e., PSO and ACO).
Table 1 provides details of this information, including the adoption of parallel computing and VRTs to reduce the computation time, as well as the type of simulation methods used in these studies. Most of these studies integrated DES with optimization, while very few studies conducted SO using ABS and SD, as shown in
Table 1. Furthermore,
Table 1 shows that three studies used parallel computing, while only one study adopted VRTs. Despite the vast improvements in computing power, computation time reduction is inevitable for five reasons: (1) Construction projects are usually characterized by uncertainty. For example, their activities’ durations are best represented by probabilistic distributions; hence, multiple simulation replications are required to obtain reliable results, which in turn prolong the computation time. (2) SO with metaheuristics requires the call of the simulation model frequently to evaluate the fitness of each individual solution of the population in each iteration. (3) Finding the optimum values of the controllable parameters for each metaheuristic requires extensive numerical experiments. (4) Construction researchers tend to hybridize DES with other simulation approaches such as system dynamics [
46] or integrate it with neural networks [
47]. Such research developments would increase the capabilities of DES but at the expense of the computation time. (5) OSC projects are dynamic in nature, meaning that optimized decisions made in the early planning stage might be infeasible in later construction stages due to inevitable uncertainties [
32]. Therefore, there is a need to make near-optimum planning decisions in a reasonable computation time.
Given the above analysis of the literature of SO in the construction domain, a number of research gaps were identified. Firstly, most of the studies used traditional SO methods by solely integrating DES and metaheuristics without benefiting from recent approaches such as reinforcement learning [
47], machine learning [
85], metamodeling [
86], and hybrid simulation [
87]. Secondly, although solving stochastic SO models takes a long computation time, hindering its wide adoption [
32], very few studies integrated SO models with computation-time-reduction techniques such as VRTs and parallel computing. Thirdly, SI metaheuristics have not been widely applied to the SO of construction applications despite their advantages over evolutionary-based metaheuristics, as discussed in the previous section. Moreover, among these SI metaheuristics, only PSO and ACO were adopted. Because of the development of PSO and ACO, many other SI metaheuristics were proposed and demonstrated to perform better in multiple optimization problems while using fewer parameters. Examples of these SI metaheuristics are FA, GWO, WOA and SSA, to name a few. Therefore, it is more worthy to test and compare such recent SI metaheuristics than to introduce another metaheuristic that reuses existing concepts from previous metaheuristics [
41]. Therefore, many researchers have conducted comparison studies among multiple metaheuristics in different research fields in order to evaluate their performances in different optimization problems, such as deterministic construction TCTP [
88], bridge deck repairs [
89], the design of water distribution networks [
90], concrete foundation design [
91], the domain decomposition of finite element models [
92], supply chain management [
93], the production scheduling of precast components [
61], aircraft routing problems [
94], and the design of steel-frame structures [
95,
96]. Moreover, the SO of OSC represents a new test field to validate and compare the potential of these new SI metaheuristics to solve a new set of real-life optimization problems characterized by uncertainty and complexity [
26]. Given these gaps, the contribution of this study is the comparison of recent SI metaheuristics that have not been investigated before solving a stochastic SO problem for OSC. This study could be seen as one of the early attempts to evaluate the performance of recent SI metaheuristics in the solution of this type of optimization problem characterized by uncertainty. Consequently, it could highlight some defects in these metaheuristics for their developers to tackle and could meanwhile suggest the most promising metaheuristics for a specific application in order for researchers and practitioners to further improve or exploit them.
5. Model Implementation
The case study of the precast full-span bridge deck construction using a launching gantry provided by Mawlana [
118] was used in this study. This case study is a bridge which consists of 35 equal spans, with a total length of 875 m.
Table 6 shows the probability distributions of each activity duration. As shown in
Table 6, the activity durations are represented by triangular distribution. Triangular distribution has been commonly used to represent construction activity durations because it requires only three parameters (i.e., low, mode, and high) that experts can easily estimate if there is no historical data [
119]. Furthermore, McCabe [
120] indicated that triangular distribution provides a good approximation of the beta distribution, which was demonstrated by AbouRizk and Halpin [
119] as an adequate distribution to fit the historical data of activity durations. In this case study, planning for 14 resources, overtime planning, and logistics decision variables considerably affect the project duration and cost. The ranges of the 14 decision variables are listed in
Table 7. The chosen overtime policy represented by the number of daily working hours and the number of working days per week affects the workers’ productivity and the activities’ durations. The detailed information related to each overtime policy, and the hourly cost of the different resources and other cost parameters are available in the
Supplementary Materials. In this study, it is assumed that both the project duration and cost have equal weights (i.e.,
), meaning that both objectives (i.e., shortening the project duration and saving the total costs) have the same priority [
121,
122,
123]. This information was identified for the developed DES model built using SimEvents (Version 9.6.0 (R2019a)). In this study, SimEvents was selected to model the system under study because of its easier compatibility with parallel computing paradigms than special-purpose construction simulation software [
10]. Before the integration of the developed simulation model with the SI metaheuristics, it was validated based on the results obtained by Mawlana and Hammad [
32]. They simulated the same project using STROBOSCOPE simulation software.
Table 8 compares the results of ten different solutions evaluated by the two simulation models (STROBOSCOPE and SimEvents). An ANOVA
F-test was conducted to determine if there is a significant difference between the results of the two simulation models. The obtained
p-values for the time and cost are 0.327 and 0.078, respectively. At a significance level of
, there is no significant difference between the results of the two simulation models.
After selecting the low-level strategy, a pilot study is required to determine the optimum number of cores to be used for parallel computing. The number of cores is increased from one to twelve, as shown in
Figure 12. Twelve is the maximum number of cores available in the used device. The corresponding time to evaluate the fitness values of a population of 50 individuals is recorded. The results show that the minimum computation time is achieved using ten cores. Using this number of cores reduces the computation time by 87.0% compared with using only one core, which represents the case of not applying the parallel computing. This significant reduction in the computation time matches the results of studies by Mawlana and Hammad [
32] and Salimi et al. [
10], who indicated a reduction in the computation time by 90.5% and 95.1%, respectively, after using parallel computing.
Figure 12 shows that increasing the number of cores does not always reduce the computation time. For example, increasing the number of cores from 11 to 12 increases the computation time. This result is because increasing the number of cores reduces the computation load assigned to each core, whereas the communication overhead increases. Moreover, the even distribution of the computation load to the available cores is an important factor in the reduction of the computation time. For example, the distribution of 50 solutions to ten cores, as shown in
Figure 12, lead to the shortest computation time.
7. Conclusions
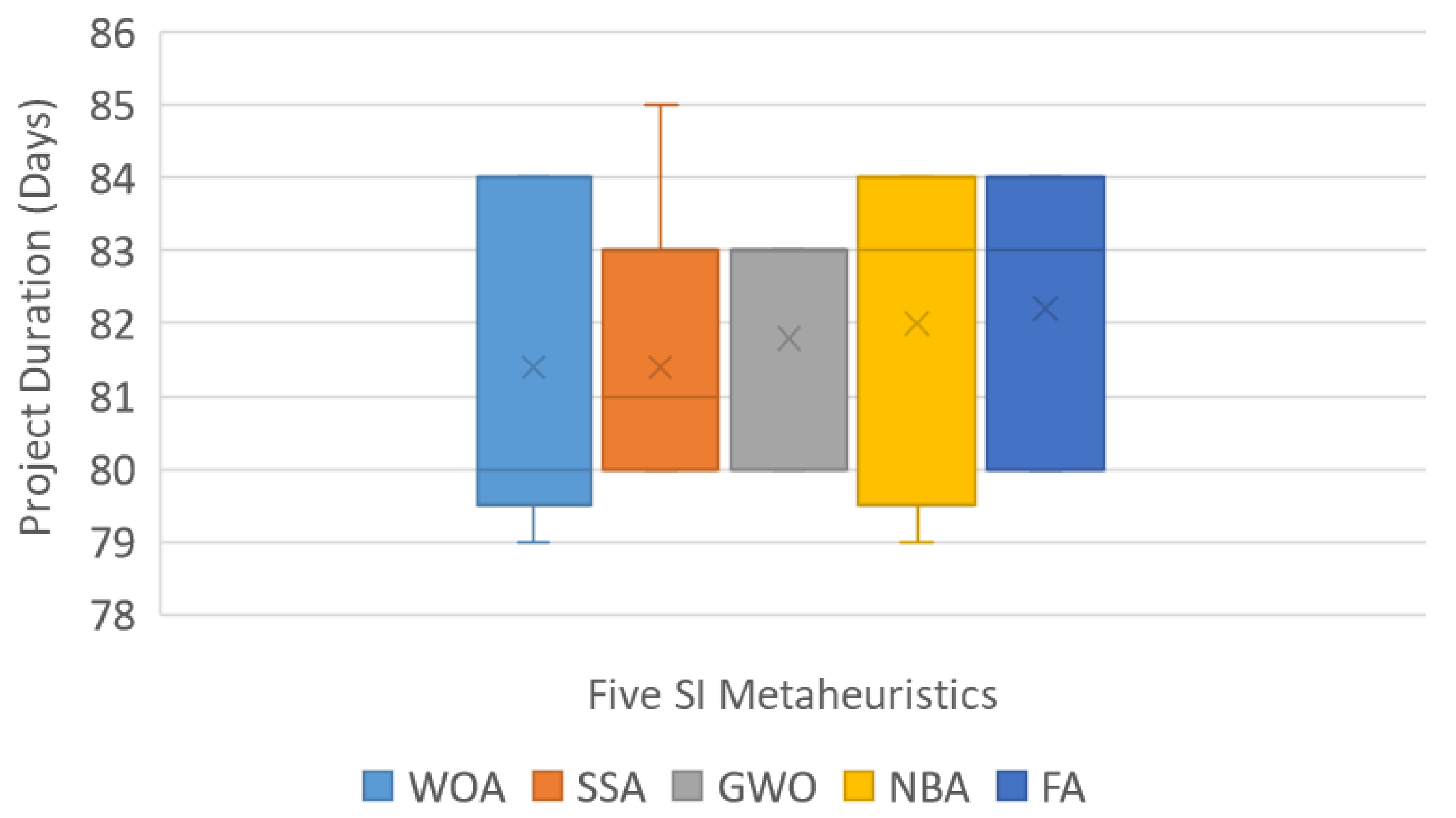
As a new construction method, OSC has the potential to improve the sustainability of the built environment. However, its wider diffusion is hindered by multiple barriers; among them is the need to make extensive planning decisions. This barrier calls for computational methods that help project managers to make the optimum planning decisions. Simulation and optimization are among the key computational methods that can capture the complexity and uncertainty of OSC projects. This study investigated, for the first time, recent SI metaheuristics, namely: the FA, GWO, the NBA, the WOA and the SSA, for the integration of simulation and optimization, and applied them to infrastructure OSC projects to simultaneously minimize projects’ duration and cost.
These SI metaheuristics were applied to a case study of a bridge deck construction project using the OSC method. The construction operations were simulated via a DES model. In order to reduce the computation time of the SO process, CRN and parallel computing were integrated into the SO models, reducing the average computation time by 87.0%. Then, a comparative study based on the convergence behaviour and the statistical analysis of the five SI metaheuristics was conducted. The convergence behaviour analysis indicated that the NBA shows rabid convergence behaviour compared with the other SI metaheuristics. However, GWO shows the best balance between exploration and exploitation to avoid stagnation into local optima. The FA exhibits smooth and steady convergence behaviour, whereas WOA and the SSA suffer from becoming stuck in local points. Based on the 95% confidence level, the statistical analysis proved that there is no statistically significant difference between the solution qualities obtained by GWO, the NBA and the WOA. However, the FA and SSA provide less optimal solutions. This comparative analysis proves that the NBA and GWO are very competitive for the SO of OSC projects. Considering the time and effort needed to tune the controllable parameters of the SI metaheuristics, GWO is preferable to the NBA, because GWO has a smaller number of tuning parameters. Besides this, its simplicity makes it more accessible for researchers to modify its logic or hybridize it with other local search methods to further improve its performance. To summarize, this study contributes to the body of knowledge by comparing multiple and recent SI metaheuristics for the stochastic SO of TCTP in infrastructure OSC projects. Furthermore, the study incorporates CRN and parallel computing with the SO models to reduce the computation time. To the best of the authors’ knowledge, this study is one of the first to integrate recent SI metaheuristics such as the FA, GWO, NBA, WOA and SSA with DES for the SO of OSC projects.
This study offers a valuable reference to professionals and academics who are interested in the optimization of the planning of OSC projects. The integration of CRN and parallel computing with the most recent and powerful SI metaheuristics such as GWO, the NBA and the WOA can provide project managers with near-optimum resource planning and logistics decisions to reap the full sustainability merits of OSC. This study could be seen as one of the early attempts to evaluate the performance of multiple SI metaheuristics in the solution of a set of optimization problems characterized by uncertainty in the construction industry [
26]. Hence, it can guide researchers to test the performance of other metaheuristics for the SO of different construction projects.
Nonetheless, this study’s conclusions should be interpreted in the light of some limitations. According to the no-free-lunch theorem, the reported results herein cannot be generalized to other types of construction projects. Furthermore, the developed simulation model ignores some non-physical aspects of OSC projects, such as organizational policies, rework, and the laborers’ skill level. These aspects could be considered using SD, forming a hybrid DES–SD model. Such hybrid models could provide another challenging testbed for SI metaheuristics to optimize real-world systems characterized by complexity and uncertainty. Given the potential and simplicity of GWO in SO for OSC, its performance could be further improved by hybridizing it with local search methods such as the Hooke–Jeeves method and the Nelder–Mead simplex method. Furthermore, different kinds of OSC projects could be used to test SI metaheuristics.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}