Optimization for a Multi-Constraint Truck Appointment System Considering Morning and Evening Peak Congestion


Abstract
:1. Introduction
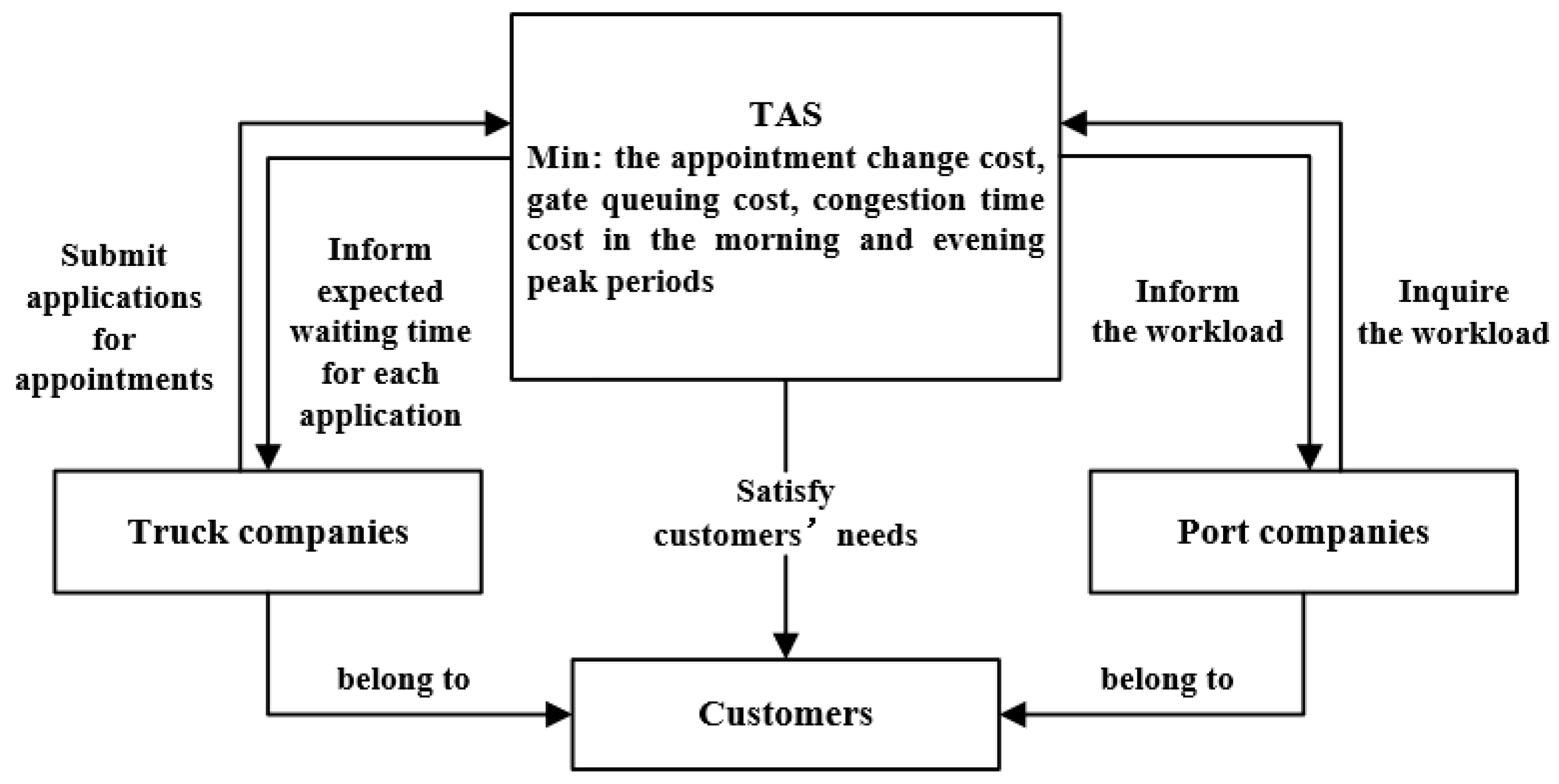
2. Problem Definition and a Multi-Constraint TAS Model
2.1. Indices, Parameters and Sets for a Multi-Constrained TAS
2.1.1. Indices
| Every time-window of the port | |
| Every time-interval of the time-window | |
| The ID of each truck | |
| The number of appointments for a truck | |
| A number corresponding to the number of appointments for the next day for each truck | |
| Truck company’s unique number | |
| Urban road grades |
2.1.2. Sets
| All terminal time-windows | |
| All time-intervals contained in each terminal time-window | |
| The number of appointments for the next day for each truck (the number of appointments ranged from 1 to 5) | |
| A truck with all the appointments for the next day | |
| All the truck companies | |
| All trucks belonging to truck company z | |
| All urban road congestion grades |
2.1.3. Parameters
| The maximum quota for each terminal time-window | |
| The truck company submits the truck arrival time-window | |
| The maximum service efficiency for each terminal time-window | |
| The number of time-intervals in a terminal time-window | |
| Coefficient of variance of gate service time | |
| The penalty value when the difference between the actual arrival time-window of the truck and the adjacent time-window is larger than the expected | |
| The penalty value when the difference between the actual arrival time-window of the truck and the adjacent time-window is smaller than the expected | |
| The penalty weight for early arrival trucks | |
| The penalty weight for late arrival trucks | |
| The penalty value of the queue length of a truck queuing at a gate | |
| The number of truck appointment by truck company | |
| The initial cost threshold of truck company | |
| Time-gap between two adjacent appointments of truck with appointments for the expected appointment schemes provided by the truck company | |
| Loss coefficient of economic cost when suffering traffic jam | |
| Length of grade road | |
| The number of trucks on roads with different levels of congestion | |
| Critical speeds of trucks on roads with different levels of congestion | |
| Trucks traveling at normal speed on different classes of roads |
2.1.4. Decision Variables
| The average truck arrival rate at | |
| The average queue length of trucks at the gate at | |
| The average departure rate from terminal gate to the terminal yard at | |
| Time-gap between two adjacent appointments of truck with appointments for the actual appointment schemes confirmed by port company | |
| – | |
| – | |
| The difference between the actual and expected time-windows of the truck arrivals | |
| The difference between the expected and actual time-windows of the truck arrivals | |
| The appointment change cost of truck company |
2.2. A Multi-Constraint TAS Model
3. A Hybrid Genetic Algorithm and Simulated Annealing Method
4. Computational Results and Discussions
4.1. Computational Experiments and Results
4.2. Comparison and Analysis of Algorithm Performance
4.3. Comparison and Analysis of Operation Cost
4.3.1. Impact of Customer Time-Windows on Operation Cost
4.3.2. Impact of Terminal Time-Window Duration on Operation Cost
4.3.3. Impact of Terminal Turn Time on Operation Cost
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Namboothiri, R.; Erera, A.L. Planning local container drayage operations given a port access appointment system. Transp. Res. Part E Logist. Transp. Rev. 2008, 44, 185–202. [Google Scholar] [CrossRef]
- Xu, J.H. Reasons of container terminal congestion of Shanghai Port and suggested solutions. China Ship Surv. 2017, 000, 16–18. [Google Scholar]
- Brodrick, C.J.; Lipman, T.E.; Farshchi, M.; Lutsey, N.P.; Dwyer, H.A.; Sperling, D.; King, F.G., Jr. Evaluation of fuel cell auxiliary power units for heavy-duty diesel trucks. Transp. Res. Part D Transp. Environ. 2002, 7, 303–315. [Google Scholar] [CrossRef] [Green Version]
- Hill, L.B.; Warren, B.; Chaisson, J. An analysis of diesel air pollution and public health in America. Clean Air Task Force 2005. [Google Scholar]
- Saxe, H.; Larsen, T. Air pollution from ships in three Danish ports. Atmos. Environ. 2004, 38, 4057–4067. [Google Scholar] [CrossRef]
- Regan, A.C.; Golob, T.F. Trucking industry perceptions of congestion problems and potential solutions in maritime intermodal operations in California. Transp. Res. Part A Policy Pract. 2000, 34, 587–605. [Google Scholar] [CrossRef] [Green Version]
- Ozbay, K.; Yanmaz-Tuzel, O.; Holguín-Veras, J. Evaluation of combined traffic impacts of time-of-day pricing program and E-ZPass usage on New Jersey Turnpike. Transp. Res. Rec. 2006, 1960, 40–47. [Google Scholar] [CrossRef]
- Dekker, R.; van der Heide, S.; van Asperen, E.; Ypsilantis, P. A chassis exchange terminal to reduce truck congestion at container terminals. Flex. Serv. Manuf. J. 2013, 25, 528–542. [Google Scholar] [CrossRef] [Green Version]
- van Asperen, E.; Borgman, B.; Dekker, R. Evaluating impact of truck announcements on container stacking efficiency. Flex. Serv. Manuf. J. 2013, 25, 543–556. [Google Scholar] [CrossRef] [Green Version]
- Grubisic, N.; Krljan, T.; Maglić, L.; Vilke, S. The microsimulation model for assessing the impact of inbound traffic flows for container terminals located near city centers. Sustainability 2020, 12, 9478. [Google Scholar] [CrossRef]
- Pandian, R.S.; Soltysova, Z. Management of mass customized orders using flexible schedules to minimize delivery times. Pol. J. Manag. Stud. 2018, 18. [Google Scholar] [CrossRef]
- Heilig, L.; Voß, S. Inter-terminal transportation: An annotated bibliography and research agenda. Flex. Serv. Manuf. J. 2017, 29, 35–63. [Google Scholar] [CrossRef]
- Giuliano, G.; O’Brien, T. Reducing port-related truck emissions: The terminal gate appointment system at the Ports of Los Angeles and Long Beach. Transp. Res. Part D Transp. Environ. 2007, 12, 460–473. [Google Scholar] [CrossRef]
- Phan, M.H.; Kim, K.H. Negotiating truck arrival times among trucking companies and a container terminal. Transp. Res. Part E Logist. Transp. Rev. 2015, 75, 132–144. [Google Scholar] [CrossRef]
- Zhao, W.; Goodchild, A.V. The impact of truck arrival information on container terminal rehandling. Transp. Res. Part E Logist. Transp. Rev. 2010, 46, 327–343. [Google Scholar] [CrossRef]
- Torkjazi, M.; Mirjafari, P.S.; Poorzahedy, H. Reliability-based network flow estimation with day-to-day variation: A model validation on real large-scale urban networks. J. Intell. Transp. Syst. 2018, 22, 121–143. [Google Scholar] [CrossRef]
- Li, N.; Chen, G.; Govindan, K.; Jin, Z. Disruption management for truck appointment system at a container terminal: A green initiative. Transp. Res. Part D Transp. Environ. 2018, 61, 261–273. [Google Scholar] [CrossRef]
- Schulte, F.; Lalla-Ruiz, E.; González-Ramírez, R.G.; Voß, S. Reducing port-related empty truck emissions: A mathematical approach for truck appointments with collaboration. Transp. Res. Part E Logist. Transp. Rev. 2017, 105, 195–212. [Google Scholar] [CrossRef]
- Ramírez-Nafarrate, A.; González-Ramírez, R.G.; Smith, N.R.; Guerra-Olivares, R.; Voß, S. Impact on yard efficiency of a truck appointment system for a port terminal. Ann. Oper. Res. 2017, 258, 195–216. [Google Scholar] [CrossRef]
- Phan, M.H.; Kim, K.H. Collaborative truck scheduling and appointments for trucking companies and container terminals. Transp. Res. Part B Methodol. 2016, 86, 37–50. [Google Scholar] [CrossRef]
- Chen, G.; Govindan, K.; Yang, Z. Managing truck arrivals with time windows to alleviate gate congestion at container terminals. Int. J. Prod. Econ. 2013, 141, 179–188. [Google Scholar] [CrossRef]
- Torkjazi, M.; Huynh, N.; Shiri, S. Truck appointment systems considering impact to drayage truck tours. Transp. Res. Part E Logist. Transp. Rev. 2018, 116, 208–228. [Google Scholar] [CrossRef]
- Kot, S. Cost structure in relation to the size of road transport enterprises. PROMET-Traffic Transp. 2015, 27, 387–394. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Zhou, X.; List, G.F. Using time-varying tolls to optimize truck arrivals at ports. Transp. Res. Part E Logist. Transp. Rev. 2011, 47, 965–982. [Google Scholar] [CrossRef]
- Shiri, S.; Huynh, N. Optimization of drayage operations with time-window constraints. Int. J. Prod. Econ. 2016, 176, 7–20. [Google Scholar] [CrossRef]
- Shiri, S.; Huynh, N. Assessment of US chassis supply models on drayage productivity and air emissions. Transp. Res. Part D Transp. Environ. 2018, 61, 174–203. [Google Scholar] [CrossRef]
- Volkanovski, A.; Mavko, B.; Boševski, T.; Čauševski, A.; Čepin, M. Genetic algorithm optimisation of the maintenance scheduling of generating units in a power system. Reliab. Eng. Syst. Saf. 2008, 93, 779–789. [Google Scholar] [CrossRef]
- Zhang, R.; Wu, C. A simulated annealing algorithm based on block properties for the job shop scheduling problem with total weighted tardinessobjective. Comput. Oper. Res. 2011, 38, 854–867. [Google Scholar] [CrossRef]
- Chung, K.H.; Ko, C.S.; Shin, J.Y.; Hwang, H.; Kim, K.H. Development of mathematical models for the container road transportation in Korean trucking industries. Comput. Ind. Eng. 2007, 53, 252–262. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Exp. Num. | 1 | 2 | 3 | |||
| Quota per time-window | (11,0,1,1,1,1,1,0,1) | (1,2,1,1,1,2,1,1,1,1) | (2,2,2,2,2,2,2,2,2,2) | |||
| Number of jobs | 3 | 4 | 5 | |||
| Desired arrival time-windows | [1,3,6,8] | [3,3] | [1,1] | |||
| [2,6,7] | [3,9,9] | |||||
| TAS solution | [1,4,6,8] | [2,3] | [1,1] | |||
| [2,6,7] | [2,9,9] | |||||
| Objective value | TOTAL = 12.1678 | X1 = 1 | TOTAL = 17.6862 | X1 = 1 | TOTAL = 23.5191 | X1 = 1 |
| X2 = 3 | X2 = 0 | X2 = 0 | ||||
| X3 = 1 | X3 = 0 | X3 = 1 | ||||
| X4 = 0 | X4 = 3 | X4 = 0 | ||||
| X5 = 1.9849 | X5 = 3.2942 | X5 = 5.2819 | ||||
| X6 = 5.1829 | X6 = 10.3920 | X6 = 16.2372 | ||||
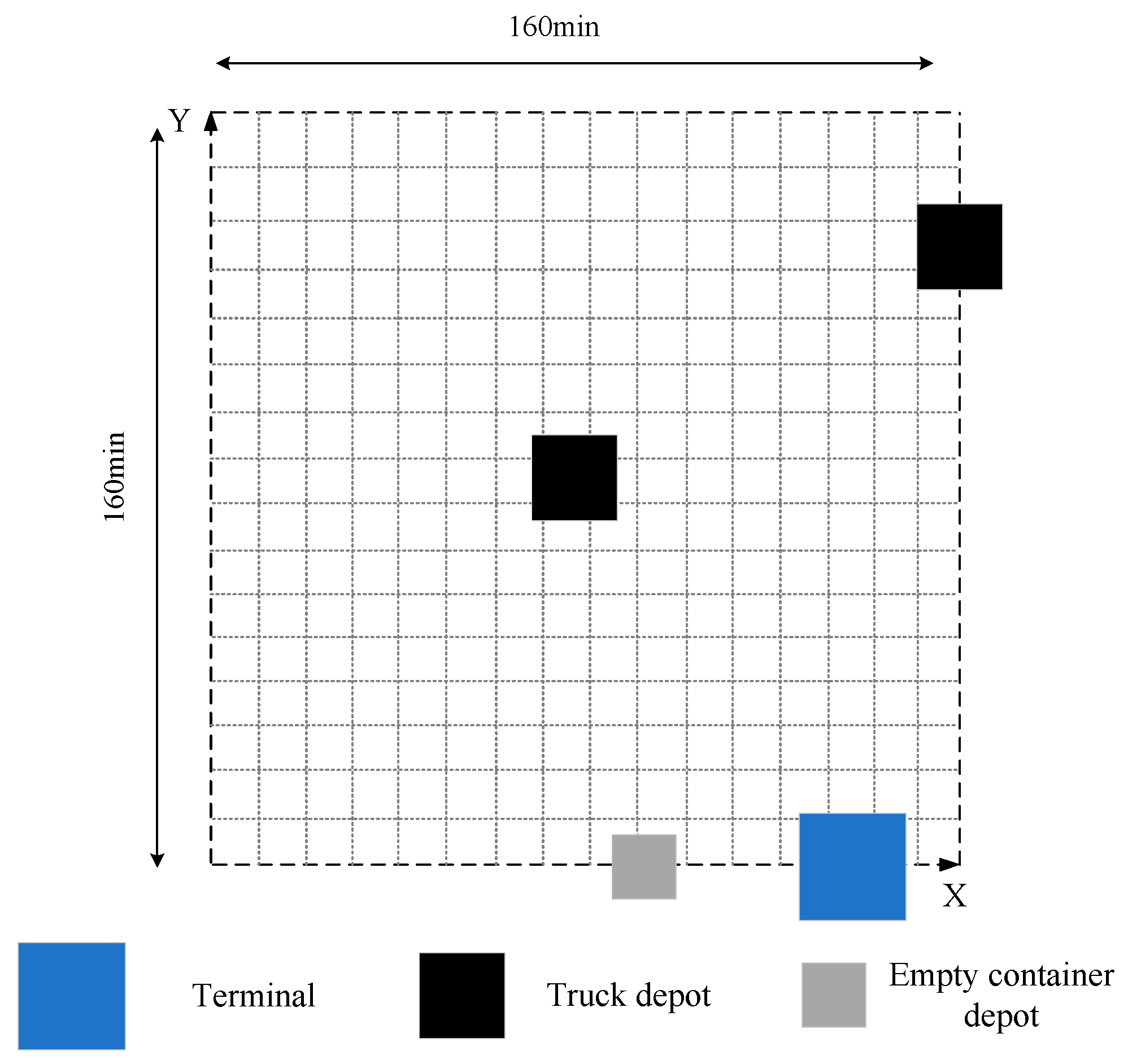
| Exp. Num. | Problem Size | Size (Jobs) | Quota per Time-Window | Num. of truck Companies | Terminal Coordinates (min) | Drayage Area (min×min) | |
|---|---|---|---|---|---|---|---|
| The small scale | X | Y | |||||
| 4 | 4 | (1,1,1,1,1,1,1,1,1,1) | 1 | 0 | 80 | 160 × 160 | |
| 5 | 8 | (2,2,2,2,2,2,2,2,2,2) | 1 | 0 | 80 | 160 × 160 | |
| 6 | 11 | (2,2,3,3,3,3,3,3,2,2) | 2 | 0 | 80 | 160 × 160 | |
| 7 | 15 | (3,3,4,4,4,4,4,4,3,3) | 2 | 0 | 80 | 160 × 160 | |
| 8 | 18 | (4,4,4,4,4,4,4,4,4,4) | 3 | 0 | 80 | 160 × 160 | |
| 9 | 22 | (4,4,5,5,5,5,5,5,4,4) | 3 | 0 | 80 | 160 × 160 | |
| 10 | 26 | (5,5,6,6,6,6,6,6,5,5) | 4 | 0 | 80 | 160 × 160 | |
| 11 | 32 | (6,6,8,8,8,8,8,8,6,6) | 4 | 0 | 80 | 160 × 160 | |
| 12 | 36 | (7,7,8,8,8,8,8,8,7,7) | 5 | 0 | 80 | 160 × 160 | |
| 13 | 37 | (7,7,9,9,9,9,9,9,7,7) | 5 | 0 | 80 | 160 × 160 | |
| 14 | 50 | (9,9,11,11,11,11,11,11,9,9) | 6 | 0 | 80 | 160 × 160 | |
| 15 | 55 | (10,10,13,13,13,13,13,13,10,10) | 7 | 0 | 80 | 160 × 160 | |
| 16 | 100 | (18,18,22,22,22,22,22,22,18,18) | 13 | 0 | 80 | 160 × 160 | |
| 17 | 157 | (29,29,35,35,35,35,35,35,29,29) | 21 | 0 | 80 | 160 × 160 | |
| 18 | 209 | (38,38,46,46,46,46,46,46,38,38) | 27 | 0 | 80 | 160 × 160 | |
| 19 | The medium scale | 257 | (47,47,57,57,57,57,57,57,47,47) | 32 | 0 | 80 | 160 × 160 |
| 20 | 324 | (59,59,72,72,72,72,72,72,59,59) | 38 | 0 | 80 | 160 × 160 | |
| 21 | 417 | (76,76,92,92,92,92,92,92,76,76) | 47 | 0 | 80 | 160 × 160 | |
| 22 | 492 | (89,89,109,109,109,109,109,109,89,89) | 60 | 0 | 80 | 160 × 160 | |
| 23 | 569 | (103,103,126,126,126,126,126,126,103,103) | 67 | 0 | 80 | 160 × 160 | |
| 24 | 602 | (109,109,133,133,133,133,133,133,109,109) | 71 | 0 | 80 | 160 × 160 | |
| 25 | 663 | (120,120,146,146,146,146,146,146,120,120) | 74 | 0 | 80 | 160 × 160 | |
| 26 | The large scale | 701 | (131,131,160,160,160,160,160,160,131,131) | 62 | 0 | 80 | 160 × 160 |
| 27 | 754 | (136,136,166,166,166,166,166,166,136,136) | 70 | 0 | 80 | 160 × 160 | |
| 28 | 827 | (149,149,182,182,182,182,182,182,149,149) | 75 | 0 | 80 | 160 × 160 | |
| 29 | 1032 | (186,186,228,228,228,228,228,228,186,186) | 82 | 0 | 80 | 160 × 160 | |
| 30 | 1782 | (321,321,393,393,393,393,393,393,321,321) | 90 | 0 | 80 | 160 × 160 | |
| 31 | 2438 | (439,439,537,537,537,537,537,537,439,439) | 157 | 0 | 80 | 160 × 160 | |
| Exp. Num. | TAS Considering Only Gate Gueuing Tme | TAS Considering the Change Cost and Gate Waiting Time | TAS in this paper | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TAS | Restricted Drayage Problem | TAS | Restricted Drayage Problem | TAS | Restricted Drayage Problem | |||||||||||||||
| Objective Function Value (Total Cost) | Target Value (min) | Num. of Trucks Required | Objective Function Value (Total Cost) | X1 | X2 | X3 | X4 | X5 | Target Value (min) | Num. of Trucks Required | Objective Function Value (Total Cost) | X1 | X2 | X3 | X4 | X5 | X6 | Target Value (min) | Num. of Trucks Required | |
| 4 | 1.3 | 794 | 2 | 3.3 | 1 | 0 | 1 | 0 | 1.3 | 652 | 1 | 3.3 | 1 | 0 | 1 | 0 | 1.3 | 0 | 599 | 1 |
| 5 | 3.5 | 2317 | 3 | 12.3 | 0 | 3 | 0 | 6 | 3.3 | 2143 | 3 | 9.4 | 1 | 0 | 1 | 3 | 3.3 | 1.1 | 2009 | 3 |
| 6 | 4.2 | 3257 | 6 | 23.5 | 1 | 0 | 0 | 18 | 4.5 | 3048 | 4 | 36.2 | 1 | 0 | 9 | 18 | 4.3 | 3.9 | 2731 | 3 |
| 7 | 6.9 | 3249 | 7 | 8.1 | 1 | 0 | 0 | 0 | 7.1 | 2976 | 5 | 27.7 | 1 | 3 | 0 | 9 | 5.3 | 9.4 | 2799 | 4 |
| 8 | 7.9 | 4729 | 9 | 38 | 0 | 6 | 0 | 24 | 8 | 4278 | 7 | 48.6 | 2 | 3 | 3 | 24 | 7.2 | 9.4 | 4258 | 5 |
| 9 | 10.1 | 6031 | 12 | 19.3 | 0 | 0 | 9 | 0 | 10.3 | 5327 | 8 | 32.9 | 1 | 3 | 9 | 0 | 10.5 | 9.4 | 5032 | 8 |
| 10 | 11.2 | 6924 | 12 | 35.6 | 0 | 0 | 0 | 24 | 11.6 | 6643 | 9 | 54.5 | 0 | 6 | 0 | 18 | 10.9 | 19.6 | 6337 | 8 |
| 11 | 16.8 | 8541 | 13 | 43.1 | 0 | 9 | 0 | 18 | 16.1 | 8132 | 13 | 73.5 | 1 | 9 | 3 | 24 | 16.9 | 19.6 | 7149 | 11 |
| 12 | 16.3 | 9189 | 15 | 49.4 | 2 | 6 | 4 | 21 | 16.4 | 8574 | 14 | 70 | 3 | 3 | 9 | 18 | 17.4 | 19.6 | 8142 | 12 |
| 13 | 17.9 | 1,0145 | 18 | 86.2 | 2 | 15 | 0 | 51 | 18.2 | 9721 | 14 | 89.4 | 3 | 15 | 3 | 27 | 19.3 | 22.1 | 9130 | 13 |
| 14 | 22.8 | 1,5011 | 22 | 62.9 | 1 | 9 | 0 | 30 | 22.9 | 1,3829 | 20 | 104.7 | 0 | 9 | 3 | 33 | 22.8 | 36.9 | 1,3580 | 18 |
| 16 | 47.3 | 2,7398 | 45 | 101.7 | 0 | 12 | 1 | 45 | 43.7 | 2,6493 | 33 | 147.4 | 1 | 6 | 3 | 51 | 46.9 | 39.5 | 2,2671 | 27 |
| 17 | 86.7 | 5,1147 | 96 | 180.2 | 0 | 21 | 0 | 72 | 87.2 | 5,0436 | 60 | 239.4 | 0 | 24 | 3 | 57 | 82.6 | 72.8 | 4,3792 | 42 |
| 18 | 111.2 | 6,1985 | 107 | 235.3 | 10 | 36 | 0 | 78 | 111.3 | 6,0654 | 80 | 292.2 | 7 | 24 | 1 | 75 | 105.6 | 79.6 | 5,8430 | 69 |
| 19 | 127.3 | 6,9275 | 123 | 286 | 14 | 42 | 0 | 92 | 138 | 6,7528 | 89 | 386.9 | 12 | 45 | 1 | 87 | 131.7 | 110.2 | 6,6801 | 83 |
| 20 | 151.7 | 8,3892 | 136 | 350.9 | 19 | 54 | 0 | 126 | 151.9 | 8,1467 | 109 | 494 | 14 | 51 | 3 | 153 | 153.3 | 119.7 | 7,5350 | 89 |
| 21 | 213.7 | 11,7644 | 159 | 400 | 1 | 48 | 0 | 164 | 187 | 11,7257 | 136 | 724.9 | 12 | 39 | 1 | 195 | 219.4 | 258.5 | 11,4942 | 132 |
| 22 | 231.9 | 13,3572 | 173 | 457.3 | 0 | 36 | 0 | 189 | 232.3 | 13,2672 | 161 | 834.4 | 0 | 33 | 1 | 243 | 226.2 | 331.2 | 11,9985 | 152 |
| 23 | 496.1 | 17,6785 | 301 | 702.2 | 0 | 42 | 1 | 182 | 477.2 | 15,9638 | 213 | 853.4 | 0 | 27 | 0 | 270 | 229.4 | 327 | 12,9041 | 198 |
| 24 | 602.7 | 18,9064 | 324 | 963.6 | 0 | 75 | 0 | 275 | 613.6 | 16,7382 | 227 | 1309.5 | 0 | 45 | 0 | 309 | 459.3 | 496.2 | 15,7029 | 210 |
| 25 | 662.4 | 19,3926 | 336 | 1028.1 | 0 | 75 | 0 | 291 | 662.1 | 17,3083 | 235 | 1640.3 | 0 | 51 | 1 | 393 | 594.1 | 601.2 | 17,8592 | 232 |
| 26 | 764.9 | 22,6839 | 342 | 1190.8 | 0 | 68 | 1 | 375 | 746.8 | 20,1126 | 254 | 1782.6 | 0 | 54 | 3 | 471 | 632.1 | 622.5 | 18,2952 | 227 |
| 27 | 874.7 | 26,7538 | 367 | 1319.9 | 1 | 89 | 0 | 423 | 806.9 | 22,6875 | 287 | 1878.2 | 12 | 54 | 0 | 492 | 647.8 | 672.4 | 23,0601 | 249 |
| 28 | 942.8 | 29,6423 | 376 | 1404.9 | 0 | 72 | 1 | 468 | 863.9 | 24,7532 | 307 | 1900.1 | 0 | 61 | 0 | 537 | 622.8 | 679.3 | 23,9024 | 276 |
| 29 | 1267.9 | 40,7743 | 487 | 1814.8 | 6 | 87 | 0 | 587 | 1134.8 | 39,8631 | 427 | 2247.4 | 0 | 75 | 0 | 590 | 698.3 | 884.1 | 34,9529 | 396 |
| 30 | 1246.9 | 43,8649 | 507 | 2174.7 | 8 | 92 | 0 | 621 | 1453.7 | 41,5478 | 447 | 2668.2 | 0 | 93 | 3 | 652 | 938.1 | 982.1 | 38,4750 | 419 |
| 31 | 2658.8 | 93,5753 | 924 | 4230.9 | 0 | 187 | 0 | 1067 | 2976.9 | 85,7228 | 874 | 4744.6 | 8 | 162 | 1 | 1019 | 1731.6 | 1823 | 82,9420 | 776 |
| HGA-SA | GA | RTSA | ||||||
|---|---|---|---|---|---|---|---|---|
| Exp. Num. | Number of Jobs | Num. of Truck Companies | Target Value (min) | CPU(s) | Target Value (min) | CPU(s) | Target Value (min) | CPU(s) |
| N1 | 582 | 50 | 17,2948 | 7249.92 | 23,4596 | 8032.47 | 20,3495 | 7639.29 |
| N2 | 582 | 40 | 20,2950 | 7439.47 | 24,3858 | 7932.59 | 20,4950 | 8639.59 |
| N3 | 582 | 10 | 25,4893 | 1,0060.27 | 32,4560 | 1,0729.48 | 30,3028 | 9932.83 |
| N4 | 582 | 5 | 26,3458 | 9438.28 | 35,3940 | 1,0183.38 | 33,4567 | 1,1372.62 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, B.; Liu, X.; Yang, Y.; Li, J.; Postolache, O. Optimization for a Multi-Constraint Truck Appointment System Considering Morning and Evening Peak Congestion. Sustainability 2021, 13, 1181. https://0-doi-org.brum.beds.ac.uk/10.3390/su13031181
Xu B, Liu X, Yang Y, Li J, Postolache O. Optimization for a Multi-Constraint Truck Appointment System Considering Morning and Evening Peak Congestion. Sustainability. 2021; 13(3):1181. https://0-doi-org.brum.beds.ac.uk/10.3390/su13031181
Chicago/Turabian StyleXu, Bowei, Xiaoyan Liu, Yongsheng Yang, Junjun Li, and Octavian Postolache. 2021. "Optimization for a Multi-Constraint Truck Appointment System Considering Morning and Evening Peak Congestion" Sustainability 13, no. 3: 1181. https://0-doi-org.brum.beds.ac.uk/10.3390/su13031181