
Advanced Driver Assistant Systems Focused on Pedestrians’ Safety: A User Experience Approach



Department of Psychology, Faculty of Arts, Palacký University Olomouc, Křížkovského 8, 779 00 Olomouc, Czech Republic
*
Author to whom correspondence should be addressed.
Sustainability 2021, 13(8), 4264; https://0-doi-org.brum.beds.ac.uk/10.3390/su13084264
Submission received: 1 February 2021
/
Revised: 6 April 2021
/
Accepted: 8 April 2021
/
Published: 12 April 2021
(This article belongs to the Collection Emerging Technologies and Sustainable Road Safety)
Abstract
:Globally, pedestrians represent 23% of all road deaths. Many solutions to protect pedestrians are proposed; in this paper, we focus on technical solutions of the ADAS–Advanced Driver Assistance Systems–type. Concerning the interaction between drivers and pedestrians, we want to have a closer look at two aspects: how to protect pedestrians with the help of vehicle technology, and how pedestrians–but also car drivers–perceive and accept such technology. The aim of the present study was to analyze and describe the experiences, needs, and preferences of pedestrians–and drivers–in connection with ADAS, or in other words, how ADAS should work in such a way that it would protect pedestrians and make walking more relaxed. Moreover, we interviewed experts in the field in order to check if, in the near future, the needs and preferences of pedestrians and drivers can be met by new generations of ADAS. A combination of different methods, specifically, an original questionnaire, on-the-spot interviewing, and expert interviews, was used to collect data. The qualitative data was analyzed using qualitative text analysis (clustering and categorization). The questionnaire for drivers was answered by a total of 70 respondents, while a total of 60 pedestrians agreed to complete questionnaires concerning pedestrian safety. Expert interviews (five interviews) were conducted by means of personal interviews, approximately one hour in duration. We conclude that systems to protect pedestrians–to avoid collisions of cars with pedestrians–are considered useful by all groups, though with somewhat different implications. With respect to the features of such systems, the considerations are very heterogeneous, and experimentation is needed in order to develop optimal systems, but a decisive argument put forward by some of the experts is that autonomous vehicles will have to be programmed extremely defensively. Given this argument, we conclude that we will need more discussion concerning typical interaction situations in order to find solutions that allow traffic to work both smoothly and safely.
1. Introduction
According to the WHO Global Status Report on Road Safety (2018), about 1.35 million people die each year in road traffic accidents. Globally, pedestrians represent 23% of this figure. In the U.S., according to Governors Highway Safety Association (GHSA) [1], pedestrians now represent 17% of all traffic deaths; in Europe, it is 27% [2].
To alleviate this problem, many solutions to protect pedestrians have been proposed. In this paper, we focus on technical solutions of the ADAS–Advanced Driver Assistance Systems–type. New vehicle technologies such as ADAS are expected to minimize road trauma (including pedestrians or, more generally, vulnerable road users) globally by performing optimally on high-quality roads with predictable infrastructure [3]. The on-going penetration of Advanced Driver Assistance Systems (ADAS) in road vehicles is expected to improve traffic efficiency and safety significantly [4]. Consequently, we can expect positive impacts on sustainability issues, such as with concrete climate change.
Concerning the interaction between traditional vehicles and pedestrians, we want to have a closer look at two aspects: how to protect pedestrians with the help of vehicle technology, and how pedestrians–but also car drivers–perceive and accept such technology. The design of vehicle systems for pedestrian protection is divided into passive protection and active protection. The former refers to the study of the characteristics of traffic accidents through the statistical rules of random traffic accidents, so as to discover the causes of accidents and improve vehicle safety technology for typical problems. This improvement is mainly reflected in the improvement of the body structure, such as the front bumper assembly, bonnet assembly, and front windshield. Active protection technology includes assistance systems for dangerous working conditions or random dangerous moments, such as driver fatigue, distraction, the blind area of a driver’s vision, and pedestrian intrusion. Among them, Driver Fatigue Monitoring System (DFM), Blind Spot Detection (BSD), and Pedestrian Collision Warning (PCW) are the most important Advanced Driver Assistance Systems (ADAS) for the protection of pedestrians.
Autonomous cars are seen as one of the key aspects in the next technological revolution. However, the main barrier to their adoption is the lack of public trust. Kaur and Rampersad (2018) found that the ability of autonomous cars to meet performance expectations and their reliability were important determiners of adoption for users.
ADAS can be categorized in levels 1 or 2 of the SAE (The international society of automotive engineers) levels for vehicle automation. However, the acceptance of assistance systems seems to be low and difficult to popularize. It seems as if vehicle buyers are not prepared to spend money for the sake of pedestrians and that they would rather do so in order to protect their own direct interests. For example, although protective airbags for pedestrians perform well in crash tests, they cannot be popularized in the market. Only a few models, such as the Volvo V40, are fitted with the device, which Volvo will soon be abandoning.
Car manufacturers have invested a staggering amount of resources into autonomous car technology, as they prepare for the full commercialization of autonomous cars in the coming years. To achieve this goal, some non-technical issues remain, especially consumer stimulation, the acceptance of new technology, and ethical or moral concerns. Tackling these challenges requires thoughtful solutions that satisfy consumers, industry, and governmental requirements [5].
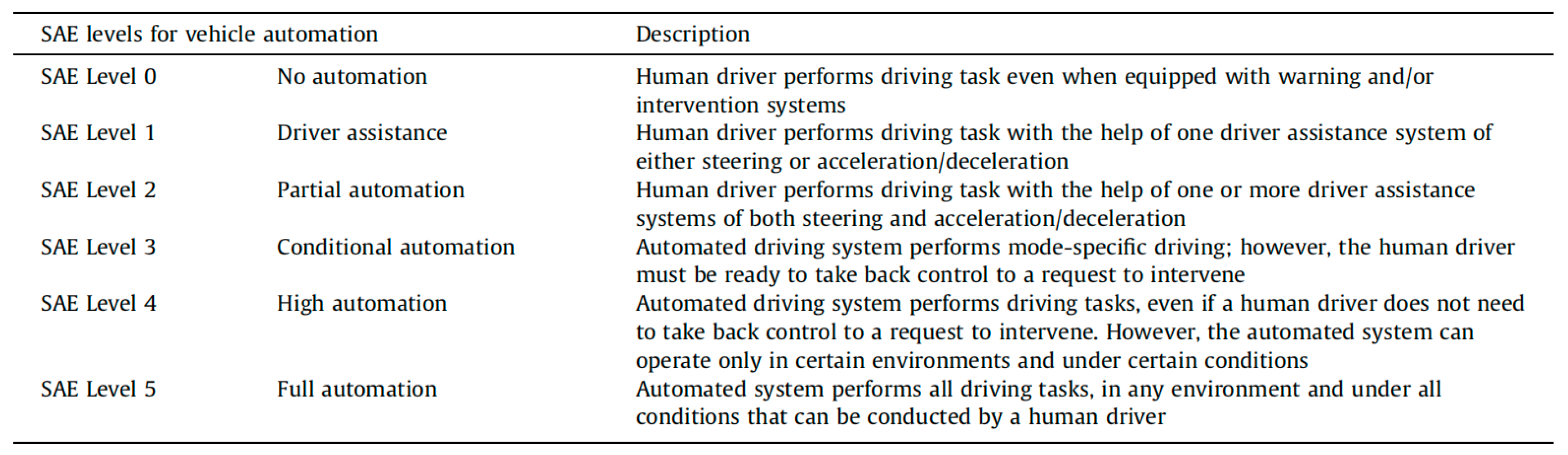
The international society of automotive engineers (SAE) has developed a six-level classification standard (see Figure 1) for automotive automations [6]. According to this standard, the automation level of most of the world’s mass-produced automobiles is still between Level 0 (L.0) and L.1. Even Tesla’s smart vehicle, which already has an advanced “Autopilot” feature, is only on L.2 to L.3 according to Figure 1 [7]. Even if the protection of vulnerable road users (VRUs) is probably seen as part of the driving task that is referred to in Figure 1, it is not mentioned explicitly, which raises the suspicion that VRU safety will not be a central issue even in the future. Therefore, in the course of full car automation, or autonomous driving, the development of technology that provides pedestrians with active protection (such as ADAS) will remain the focus of future research for a longer time.
At present, the research on ADAS mainly focuses on the interaction between drivers and vehicles, and among drivers or vehicles. Acceptance of different types of ADAS by drivers is also an issue. However, the research on pedestrians’ perception and acceptance of pedestrian protection technology is still developing.
The area of interest here is the interaction between pedestrians and vehicles (or rather: between pedestrians and drivers?). Let us start with pedestrians who want to cross the road: The decision of pedestrians to cross the road is influenced by informal rules supported by signals (eye contact, gesture, body posture, etc.) [8,9]. However, in front of an autonomous vehicle, pedestrians have no chance to communicate with the “driver” in a traditional way, as the person sitting in the car does not control the driving processes. Nevertheless, the demand for interaction with the “driver” will continue to exist. In the Wizard of Oz setup experiment, researchers hid the real driver in the passenger seat and controlled the vehicle with the help of a hidden steering wheel. The impression from the outside was “Either there is no driver at the wheel, or the driver is doing something unrelated to driving (reading the newspaper, talking on the phone, etc.)”. The study found that pedestrians were more reluctant to cross the street when they thought that the “drivers” were doing something unrelated to driving [10].
Some researchers have divided communication to pedestrians into two categories: communication of awareness, which refers to the ability of the system to detect the presence of pedestrians, and communication of intent, which is the system’s ability to communicate its next move to pedestrians [11]. The reason is that the ability to detect pedestrians is not equal to the ability to communicate the next decisions and activity steps of the vehicle to pedestrians accurately, thus affecting the pedestrian’s decision to cross.
Lagstrom and Lundgren [12] used vehicle-mounted LED tubes for communication to pedestrians in their study. When the LED light shrinks from the corner of the display screen to the middle, this expresses the information “about to start” to pedestrians. When the LED light spreads out from the middle of the display screen to all sides, these express“about to yield”. Of course, pedestrians could not understand the visual signals without learning, and the system was not tested on children or on persons with special challenges. Blink, another suggested interactive technology, requires pedestrians to learn as well [11]. When pedestrians want to cross the road, they need to hold out their hand; the vehicle will provide a green “walk” signal on its front, showing that the pedestrian is given priority. If pedestrians want to let the vehicle pass first, they need to wave in front of the vehicle; then, the vehicle will also present a “wave” on the interface, indicating that it is going to proceed.
Another study concerning interaction with pedestrians through visual signals is by Fridman et al. [13]. They conducted a survey involving 200 participants. A green text on the front of the vehicle invited pedestrians to “walk”, indicating, of course, that the vehicle would yield, while a red text told them “do not walk”. Snyder [14] used a smiling pattern to convey the message to pedestrians that the vehicle would slow down and, if needed, stop for the pedestrian. The idea was that a “smile” is a friendly gesture and can make pedestrians feel more comfortable. However, Deb et al. [7] analyzed the effects of such “friendly” vehicle features applied for interacting with pedestrians, and showed that without training, pedestrians were confused by the information conveyed by the smiling face. Simple and clear “pass” and “stop” signals would be better to understand and, consequently, more popular with pedestrians.
On the basis of the aforementioned results, the researchers believe that when interacting with pedestrians, a good visual vehicle interface should have the following characteristics: easy to explain, use, and learn [7]. In order to minimize training, it is better to establish interaction rules on the basis of existing formal or informal traffic rules instead of proposing new interaction rules. The cognitive resources needed to perceive the vehicle’s next move when road users encounter each other should be minimal.
Furthermore, nowadays the shift of pedestrian attention to smartphones is one of the main contributors to pedestrian accidents [11]. For distracted and visually impaired pedestrians, the visual vehicle system cannot meet the needs of interaction. Auditory and tactile information would be more appropriate.
Politis [15] proposed that a combination of multi-channel methods (visual, auditory, and tactile) could convey the upcoming risk effectively. Considering the interaction between smart vehicles and pedestrians, multi-channel interaction modes are required to be presented simultaneously. Liu et al. [16] designed an efficient V2X pedestrian communication system for vehicles to ensure pedestrian safety. They developed two safety applications to protect the transmission of data between vehicles and pedestrians. The warning system should be shown in the vehicle. The system should provide a collision warning on a flat panel monitor in the vehicle. A pre-warning should be shown on the smartphone of the pedestrian. Alerts can be sent in real time to pedestrians. Mahadevan [17] et al. believe that the interaction interface between pedestrians and automated vehicles can be inside or outside the vehicle. They created four interfaces: (1) Vehicle-only interfaces; (2) a Vehicle and Street infrastructure interface, where the interactive interface is installed in the vehicle and in the street; (3) a Vehicle and Pedestrian-interface, in which the interface is installed in vehicles and on pedestrians’ mobile phones; (4) a Mixed interface, where the interaction interface is installed in the vehicle, on the pedestrian side, and in the road infrastructure.
When asked what kind of information they consider most effective, 40% of the people who were interviewed mentioned acoustic signals from the vehicle. About 50% of the pedestrians prefer those signals from their phone as signals coming from the vehicle could be affected by interference caused by noise emanating from the environment [17]. In real life, mobile phone information is more likely to attract the attention of pedestrians. The study by Deb et al. [7] confirmed that audio signals facilitate the transmission of information. Among them, music and verbal messages have similar effects, while beeping can confuse pedestrians.
In addition, the compatibility of the information system is an important factor affecting pedestrian acceptance. This refers to the degree of compatibility with the existing traffic system [18], that is, whether existing formal or informal traffic rules can help pedestrians to quickly understand and use vehicle-mounted systems, and whether the existing infrastructure can support their operation. Deb et al. [19] studied 482 respondents. They developed a scale to measure the acceptance of fully automated vehicles by pedestrians, and proposed three elements of that scale: safety, interaction, and compatibility. Adams [20] points out that drivers of traditional vehicles, pedestrians, and other road users may expect automated vehicles to give way to them in any case, which poses new challenges to the existing traffic facilities, laws, and regulations.
Given the above, researchers are exploring how autonomous vehicles can improve given their perception and acceptance by pedestrians and cyclists, while keeping them safe. Less attention was given to the question of what kind of ADAS pedestrians and cyclists consider relevant and helpful in terms of safety and comfort when walking or cycling.
Much attention is paid to traffic safety research and ADAS which are designed to assist drivers in terms of safety and comfort. ADAS are primarily designed to secure car occupants and to prevent car-to-car collisions or single-vehicle crashes. Less attention is paid to the safety of those road users who are not sitting in cars. This is a serious research shortcoming, as VRUs are in greater danger, especially in urban settings, and dominate the statistics of injured and killed road users. Even less research deals with the perspective of VRUs, their needs, and what they consider relevant and helpful in terms of their safety and comfort when walking or cycling.
Aims and Research Questions
The aim of this study is to analyze and describe the experiences, needs, and preferences of pedestrians in connection with ADAS, or, in other words, how ADAS should work so that it would protect pedestrians and make walking more relaxed. In addition to this, we will focus on car drivers with the same question: What ADAS design would they prefer in order to prevent potential accidents involving pedestrians? What are their experiences with ADAS that are available nowadays? Moreover, we will interview experts in order to check if, in the near future, the needs and preferences of pedestrians and drivers can be met by new generations of ADAS.
Research questions:
- Do pedestrians recognize the current ADAS as something that makes walking safer or more comfortable? What are their experiences?
- In the eyes of pedestrians, how should ADAS be designed to protect pedestrians, so that they would feel safe and more comfortable?
- Do pedestrians agree with the obligation to carry with them some kind of technical instrument (e.g., a phone or chip) so that autonomous vehicles can easily detect them?
- Do pedestrians prefer semi- or fully automated vehicles to be labelled?
- What are the experiences of drivers with ADAS-designed vehicles to avoid accidents involving pedestrians?
- How should future ADAS work in order to protect pedestrians?
- Do drivers agree with pedestrians being obliged to carry some kind of technical instrument (e.g., a phone or chip) so that autonomous vehicles can easily detect them?
- Do drivers prefer semi- or fully automated vehicles to be labelled?
- What is the up-to-date research and development in terms of ADAS-designed vehicles to protect pedestrians? Does this match the preferences of pedestrians and drivers?
2. Methods and Sample
2.1. Data Collection and Processing Methods
A combination of multiple methods, specifically, an original questionnaire, on-the-spot interviewing, and expert interviews, was used to collect data. Online questionnaires were used to collect data from drivers. The on-the-spot interviewing method was employed to collect data from pedestrians. These interviews were administered in an urban setting (Olomouc, Czech Republic), specifically, in the city center, near zebra crossings. Several expert interviews with selected experts affiliated with relevant R&D companies were conducted in order to obtain information about the potential future development of assistance systems. The data was collected in the spring of 2020.
The development of the questionnaire and guidance for the interviews was based on a literature search and the description of the state of the art. Subsequently, all the tools were pilot-tested and modified according to the feedback that was received. The pilot testing involved the administration of the questionnaire and the interviews (with pedestrians), followed by inquiring about the perceived clarity of the questions asked. As far as the expert interviews are concerned, the pilot questionnaire was the first of five interviews conducted in total.
The drivers’ questionnaire was administered online. We created a questionnaire in Google Forms and used random sampling (via social networks) and snowball sampling to ask respondents to complete it. In order to be eligible for participation in the research, a person had to hold a driver’s license and drive a motor vehicle at least once weekly. Specifically, we asked the following questions:
- Have you heard of driver assistance systems installed in modern cars? If yes, which ones specifically?
- Do you have personal experience with some of the systems? (e.g., do you have one in your car or in the company car?)
- When looking especially at driving in the city, what would a driver assistance system have to do for you as a driver in order to enhance pedestrian safety?
- Does any of the assistant systems that you have experience with help you to keep pedestrians safe (e.g., recognizing a pedestrian by night, preventing emergency braking or hitting pedestrians)?
- One special driver assistance system designed to enhance the safety of pedestrians is Automatic Pedestrian Detection (APD). How do you think this system should work to help drivers to keep pedestrians safe?
The data was then analyzed using qualitative text analysis (clustering and categorization).
The pedestrian data was collected by two interviewers at three pedestrian crossings in the city of Olomouc. The interviewers asked randomly selected pedestrians to answer several questions (taking eight to ten minutes). Approximately 30% of the people addressed were willing to give an interview. We asked the following questions:
- Have you heard of driver assistance systems installed in modern cars? If yes, which ones specifically?
- A driver assistance system designed to enhance the safety of pedestrians is Automatic Pedestrian Detection. How do you think this system should work in order to help you feel safer as a pedestrian?
- In order to detect a pedestrian, semi- or fully automated vehicles (those that are partly or fully capable of driving themselves) sometimes require a pedestrian to have a technical device on him or her, e.g., a chip installed in his or her ID card or a smartphone with a tracking app (enabled). Would you agree/disagree with this being obligatory for pedestrians?
- Is it important for you that semi- or fully automated vehicles should be marked in such a way that they are recognizable for you?
The data were subsequently transcribed and analyzed using qualitative text analysis (clustering and categorization).
The expert interviews were conducted by means of personal interviews, approximately one hour in duration. The R&D companies were identified on the basis of their LinkedIn profile and then asked to participate in the interview using the contacts posted. Overall, we managed to obtain five interviews, each with an expert from one of the following companies: Valeo, TÜV, Porsche, KPIT, and Hella. The interviews were recorded and then transcribed and analyzed using qualitative text analysis (clustering and categorization).
The following questions were asked during the interviews:
What driver assistance systems primarily targeted at pedestrian protection and safety do you know?
Can you please describe how they work?
What other driver assistance systems do you think can enhance pedestrian safety?
What are the prospects of the development of assistance systems targeting, or contributing to, pedestrian safety?
What new assistance systems contributing to pedestrian safety do you expect to be routinely installed in cars within five years?
In your opinion, what assistance systems do we need to ensure maximum pedestrian safety and protection? How should they work?
Thinking of semi- or fully autonomous vehicles in urban traffic, do you think they should be marked in such a way as to let pedestrians know that the vehicle is not being driven by a human being (e.g., in crossing-the-road situations)? Why should it be so? Why not? If so, how should they be marked?
Within the next 20 years, will urban road traffic undergo major changes? If so, in which way?
2.2. Road User Samples
The questionnaire for drivers was answered by a total of 70 respondents, of whom 37 were men (52.86%) and 33 were women (47.14%) (see Table 1). Almost 56% of the research participants were under 26; the other age category, 26–70, was represented by 31 respondents (44.29%). Only one participant had had his driver’s license for less than a year. Altogether, 30 respondents (42.86%) gained their driver’s licenses one to five years ago, and 39 (55.71%) had been driving for more than six years.
A total of 60 pedestrians agreed to complete questionnaires concerning pedestrian safety. The study sample was evenly divided with regards to the number of men and women; both groups were represented by 30 individuals. A total of 31 participants (51.67%) in the survey were in the 16–25 age category. There were 29 older respondents aged up to 70 (48.33%). The vast majority of the participants were pedestrians with no distinctive features; there were only eight participants (13.33%) who often walked with children and two respondents with prams (3.33%) (see Table 2).
3. Results
The results are presented according to the different data collection methods: first, the results of the questionnaires for drivers, then the results of the interviews with pedestrians, and, finally, the results of the interviews with experts from the automotive industry. The data are presented according to the questions the respondents replied to.
3.1. Questionnaire for Drivers
The majority of the respondents (53 out of 70, i.e., 81%) have already heard of driver assistance systems installed in modern cars (Table 3). To the greatest degree, the respondents seemed to be aware of a facility aiding drivers with parking maneuvers, i.e., Automated Parking. The respondents also frequently mentioned Adaptive Cruise Control (ACC), designed to adjust the speed in order to maintain a safe distance from a vehicle ahead.
Systems designed “to ensure that the vehicle stays in its lane”, known as Lane Keeping Assistance, also appear to be popular and widely used by the drivers. Systems intended to help monitoring blind spots in the adjacent lanes (blind spot monitors) so that the drivers do not miss road users were known to some of the interviewees as well. The respondents also found the Anti-lock Braking System (ABS) and the Electronic Stability Program (ESP), or the Forward Collision Warning (FCW), useful. The Adaptive Light Control, the Pedestrian Protection System, the Traffic Sign Recognition, and “the seat belt reminder system” (commonly not listed as ADAS), a commonplace feature by now, were also mentioned (Table 4).
The majority of the respondents (43 out of 70, i.e., 61%) stated that they had personal experience with driving a car equipped with ADAS (Table 3). The respondents replied that they had experience especially with Automated Parking, sensors which issue audio warnings (in general not connected to any specific ADAS), and “beeps notifying the driver about engaging in a reversing maneuver of objects alongside and behind the vehicle” (Forward Collison Warning, Lane Departure Warning). Adaptive Cruise Control (ACC), too, was often brought up as “a great thing that they very often use”. Blind spot monitors and Emergency Braking Assistants were also mentioned. Hill Descent Control, Adaptive Light Control, “seat belt reminders”, and “ice and snow warnings” (these last two not usually mentioned as ADAS) appeared in the responses only sporadically (Table 4).
An automated pedestrian detection system that would, for example, warn the driver both “on the dashboard and on the head-up display” predominated in the respondents’ answers to the question as to which assistance system should be able to help drivers avoid collisions with pedestrians, or which assistance system they would appreciate. In particular, the drivers would appreciate sensors that would warn them “during low visibility and in night-time conditions” and systems that “would monitor road shoulders and estimate the risk of a pedestrian stepping into” the road. In addition, systems featuring audio signals to alert the driver about pedestrian crossings or forward collision warning facilities were mentioned. According to one survey participant, it would be useful to alert the driver about the presence of pedestrians by “vibrations in the steering wheel”. Another respondent came up with the idea of using “infrared radiation to detect pedestrians in a night-time setting” or direct “interaction of vehicles with traffic systems” such as pedestrian crossings with traffic lights. Other respondents, on the other hand, criticized the prospects of any other systems, arguing that the “interference of such assistance systems with driving may also be counterproductive, as it may compromise concentration and attention on the driver’s part”.
A smaller proportion of the respondents (10 out of 70, i.e., 14%) reported their personal experience with the assistance system mounted in the car that they were driving helped them to avoid a collision with a pedestrian (Table 3). The respondents stated that they were helped in avoiding a collision with a pedestrian by an “automatic pedestrian detection system” (Pedestrian Protection System) or an assistance system alerting the driver about objects in the vicinity of the car. By means of the vehicle-mounted equipment, they received a “warning on the head-up display and an audio signal”. The anti-lock braking system (ABS) helped them in emergency braking. Finally, they would welcome an assistance facility that would alert the driver about pedestrians by “making the steering wheel vibrate and producing an acoustic signal” (Table 4).
The respondents believe that the Pedestrian Protection System works very well. The specific functionality that was mentioned most often was the combination of visual and acoustic signals, i.e., parallel activation of a warning icon or indicator on the dashboard and “an audio signal similar to the one emitted when one is coming too near to a car ahead”. They would also appreciate the pedestrian being shown on the head-up display. Some would prefer a vibration in the steering wheel over an acoustic alert, while some, on the contrary, find this totally unsuitable. Others would prefer a combination of both such warnings. It was often brought up that an unpleasant sound or a “headphone jammer”, for example, might suffice. To a smaller degree, the respondents suggested only a visual pedestrian alert on the dashboard or windshield. On the other hand, they also mentioned quite frequently “the automatic slowing down of the car” in combination with sensory warnings. Their idea was that “the fuel supply should be stopped at least enough to prevent the car from accelerating”. One of the participants noted that what matters is that “the driver takes notice of the warning without him having to pay attention to anything other than the current traffic” rather than the method itself.
3.2. Questionnaire for Pedestrians
The respondents who stated that they had already heard of driver assistance systems (39 respondents out of 60, i.e., 65%) were asked which car driver assistance technologies they knew (Table 5). Most frequently, the study participants mentioned parking systems (Automated Parking) involving sensors and cameras for automated parking. Numerous responses referred to blind spot monitors, Forward Collision Warning, Automated Braking System (ABS), or Adaptive Cruise Control. Lane departure warning systems and those monitoring a safe distance from the vehicle ahead also featured frequently in the answers. The respondents were also aware of other car-mounted assistance facilities, such as devices providing for the automated detection of pedestrians (Pedestrian Protection System), systems designed to monitor driver fatigue (Driver Drowsiness Detection), Hill descent control, Night vision, and obstacle avoidance assistants such as FCW (Table 6).
For the next question, the respondents were asked how, in their opinion, an automated pedestrian detection system should work. The great majority of the responses referred to combinations of visual, audio, and tactile impulses warning the driver against an imminent collision with a pedestrian appearing near the roadway. Some would prefer “a warning signal (pedestrian icon) flashing on the dashboard and the head-up display”, supported at night-time by a simultaneous warning sound. Others argued that just a single alert, such as a “loud beep”, or, conversely, only a flashing “pedestrian sign on the dashboard” would be totally sufficient. There were also opinions that “vibrations and beeping might distract the driver’s attention”, but others opted for a “combination of a vibrating steering wheel and acoustic signals”. Suggestions for “the car being automatically slowed down after the sounding-off of a warning signal” represented the opinions of only a few. The alternative combining of all the stimuli, i.e., “an acoustic signal together with a message shown on the head-up display and a vibrating steering wheel and driver’s seat warnings”, was favored by the respondents only sporadically. In general, the respondents found any sensory warning “optimal; nevertheless, the device should be calibrated in such a way as not to distract the driver unnecessarily by alerting him constantly about pedestrians”. Thus, it is necessary to find a form of warning that would be easily detectable and quickly understood by the driver. Ideally, it should “make him able to take quick and correct action rather than over-reacting and panicking”.
The respondents were asked whether they would agree with some advanced technological devices being used to monitor the movement of pedestrians near the roadway and whether such data could be used with autonomous vehicles. They were also asked to provide the reasoning for their agreement or disagreement. The study participants’ responses suggested very sporadic approval of such measures. They would agree with their “location being tracked via their telephone or their personal ID bearing a mandatory chip provided that it would improve their safety”. However, the majority of the responses were negative. Some even considered such technology useless, “as everybody is responsible for himself or herself and it should especially apply to using a road or pavement”. Other respondents were concerned about misuse, which logically ensues from the application of such systems. “Simply anything can be misused.” The respondents brought up risks such as those associated with the tracking of the movement of people, the compromising of personal freedom, and other forms of commercial use. In addition, they reflected on “having to carry such a device on themselves at the time, which would be limiting and unpleasant, like a ball and chain”. The research participants also pondered the technical feasibility of such an approach: “How would this system apply, for example, to foreigners, older citizens, or children and animals?” Some respondents believe that “a driver could become so accustomed to the help provided by assistance programs that he would pay less attention to driving and overlook pedestrians who might not have the chip”. Others asked similar questions, such as whether “one could rely on pedestrians’ 100% discipline, that they did not forget” to take their smart device or wallet along with them. Moreover, what if the pedestrians “got used to this phenomenon to such a degree that they became less alert and relied more on technology”? It was also said that pedestrians’ and drivers’ responsibilities related to road safety should not be “taken over by technology”, that it would make more sense to “put chips in footwear”, and to find other technical solutions or “introduce the obligation to wear reflective elements”. Some of the responses included very strict views, such as that “if an autonomous vehicle is to be allowed to participate in road traffic, it would have to be able to recognize a pedestrian safely even without additional devices with which the pedestrian would be equipped”. That is, the autonomous system should be “reliable even if the other party does not fulfil its obligation”.
Finally, the respondents were asked to answer the question whether it was important for them that semi- or fully automated cars should be identified in such a way as to be recognizable by pedestrians. A slight majority of the respondents (33 out of 57) from among the pedestrians prefer that those vehicles should be identified, while the remaining 24 respondents do not find it necessary (Table 5).
3.3. Expert Interviews
We approached development managers, technological designers, and engineering trainers from five different companies that engage in the development or implementation of in-car assistance systems and asked them about their opinions on the systems intended to enhance the safety of pedestrians.
When asked about the driver assistance systems focusing primarily on pedestrian safety, the expert from TÜV SÜD Czech Republic noted “what is referred to as a braking assistant, which, for several years now, has been mandatory equipment of all European passenger cars and comes under the pedestrian protection domain in legislative terms”. In addition, he indicated the Automatic Emergency Braking system (AEB), designed to detect an obstacle ahead of the car and automatically activate the braking system. While this assistance facility is no longer a required component of car equipment, it is not unusual that people demand to have this item installed for an extra charge. The expert added that thanks to the new EU regulation on general safety, within the next decade we can expect that AEB will become an integral part of the equipment of all newly-produced passenger cars. The technical project leader for Porsche Engineering Services, s.r.o., and the expert from Hella CZ, rank among proponents of the primary active safety systems ACC, i.e., Adaptive Cruise Control, which by now have incorporated functions providing for the protection of any pedestrian on the roadway. The expert from the Systems and Functions Department of Valeo R&D Prague pointed out a completely new system, Turning Assistant (available e.g., in the Audi Q7 or Volvo XC90), will be mandatory for lorries from 2022 on and which may be expected in the upcoming years to become another assistance innovation for drivers of passenger cars. Systems such as blind spot monitors, Automatic Parking, or generally cameras should not be omitted either, as their secondary functions can rightly be associated with the protection of pedestrians. The expert from the company KPIT (a global technology company) adds that these functions, and others that use specialized night-vision cameras, too, are generally referred to as “pedestrian detection for day- and night-time” ones.
Let us now describe in greater detail how some of the aforementioned assistance systems work. Generally integrated within the power brake unit, the braking assistant is a function which “compensates for less experienced drivers’ tendency to reduce instinctively the force applied to the brake pedal during an emergency braking maneuver”. In this way, it maximizes the braking performance of the car and reduces its braking distance.
On the other hand, the emergency braking system (also referred to as AEB or Front Assist), as its name implies, is a function designed “to prevent a possible or inevitable collision not only by enhancing the braking action, but also by bringing the vehicle automatically to a complete halt”. “The most advanced systems of today are capable of estimating the danger of a collision with a pedestrian in various situations, as well as the pedestrian’s intention to step into the roadway or not.” The system warns the driver, first generally by an acoustic signal, visually via a display, or, less commonly, by activating a tactile alert. If the driver fails to respond to the warning, the car will initiate the automated braking procedure.
The main function of Adaptive Cruise Control (ACC) is to follow the car ahead and maintain a safe distance from it. In this way, for example, a car can stop on its own behind a car at the end of a queue or at a red light. “The follow-to-stop (-and-go) feature makes it possible for a car to move away autonomously if the car in front of you gets under way… however, this system involves one safety issue: it does not assume that somebody could get out of the car or step into the roadway and get in front of your car.” As an innovation, a pedestrian protection facility is often incorporated, either as an additional advanced feature of the system or in the form of a confirmation button that the driver needs to push to allow the car to drive off on its own.
Systems using windshield cameras, optic LiDARs (Light Detection and Ranging), or regular radar operate on a similar principle. “When detecting an obstacle on a collision course that is motionless or moving at a significantly lower pace, they activate the warning sequence or make an emergency stop.” Moreover, innovations such as Turn Assist indicate to lorry drivers objects on the right-hand side of the vehicle, which is “where they tend to be overlooked while making a right turn, especially under adverse visibility conditions, such as in the dark or rain”.
We also asked what other assistance systems can secondarily contribute to pedestrian safety. The experts indicated that, generally speaking, this applies to all the systems that help drivers maintain a good view out of the car, including “ventilation, wipers, intelligent headlamps, and infracameras”. Additionally, the experts believe that “all the ADAS functions which concern lane-changing or line-keeping and autonomous driving features contribute to the protection of pedestrians by simply regarding them as a traffic element”. Parking and reversing assistants also have major implications for the safety of people around the car. The Driver Monitoring System is beneficial in terms of safety, too. In principle, this assistance facility involves the monitoring of the driver’s alertness. Signals are activated when the driver is found to be inattentive to the situation ahead of the vehicle because of, for example, his or her holding a mobile phone, turning to another person in the car, or being drowsy. “A system is currently under development which, when inattentiveness is detected, should be able to activate the Lane Departure Warning (LDW) system automatically until the driver can resume driving, which would actually be a way of protecting both him or her and any pedestrians on the pavement.” Hence, it can be summarized that, more or less, all the systems which prevent any collision contribute significantly to better pedestrian safety. “On the other hand, an excess of assistance systems may compromise the driver’s attention. It is thus always about the driver, his or her abilities, and the discipline of the pedestrians.”
We were also interested in the direction of the latest development of the systems concerned with pedestrian safety. The expert from Valeo stated that the development was mainly heading towards enhancing the degree of protection for all vulnerable road users by reducing the error rates of the systems. Another expert added that “the primary problem in terms of protecting pedestrians is the early detection of whether he or she intends to step into the roadway”. Efforts are being made to improve the range, quality, and accuracy of radar sensors and cameras, especially those intended to detect stationary objects by, for example, the efficient integration of both radar and camera or infracamera systems. Designers also endeavor to improve software and develop artificial intelligence, leading to data analysis that is as fast and flawless as possible. It is key to arrive at a point of evaluation where the highest possible number of crashes is prevented while maintaining the fluency of traffic. “This is what is the greatest technological challenge of the present.” Autonomous driving cannot be omitted either, although the experts assume that it will be introduced incrementally. It is expected that “different elements of driving will be handed over to the machine step by step while assessing how this proves itself, whether the system is better than a human”. ADAS has five levels of autonomy altogether (see Figure 1 at the beginning of this paper). At this point, driving assistants can be considered as associated with the first two levels. It is not until the fifth level, L5, that a vehicle is under full autonomous control. The experts also see potential in the car communicating with the infrastructure, although at the moment we lack the relevant infrastructure, and the applicable technologies are still “in nappies”. Additionally, the idea of pedestrians being equipped with devices facilitating their detection while walking on the street seems difficult to conceive of in many respects.
The expert from Hella CZ expects that within the next five years all new cars will feature an Emergency Braking System (AEB). He adds, nevertheless, that the majority of car manufacturers offer such a system as a routine element, at least in mid-class vehicles.
Across all the expert respondents, there was agreement that the main move forward can be expected particularly in technological improvements, greater numbers of sensor devices, and greater reliability of the systems that are already available. “I also assume that they will become accessible for a wider group of people, not only for premium makes,” adds one of the experts. “The improvement of systems will entail the need for significant computing performance on board cars, which will not be cheap, and they will increase the complexity, weight, and price of the car.” It will depend a great deal on the current development of the economic situation and, therefore, he does not dare estimate whether autonomous driving can be expected as soon as within a five-year time frame. “ADAS functions capable of detecting and alerting about pedestrians are already included in luxury cars today,” and so he assumes that “in no more than five years we will be seeing autonomous vehicles without drivers”.
What else can be conceived or done to ensure the maximum protection of pedestrians? The experts believe that pedestrian safety would benefit from better infrastructure. Its improvement would not only require great investment, but might not even be technically possible. Therefore, it is essential to concentrate on ways of improving the scanning of the surroundings of the car, to assess objects with sufficient notice, and to predict contingencies. “In order to take a step forward as regards autonomous driving, it is important to increase the computing capacity of the systems first. Then we can think about what is lacking at present–communication among vehicles.” For example, 5G networks could be useful for data transmission, but the question remains whether the data flow would be fast enough. Today, we already have fully autonomous vehicles which are capable of driving on their own under ideal conditions, but we cannot consider them completely safe, as they cannot communicate among themselves and with their surroundings. Thus, they cannot, for example, exchange warnings about an obstacle in each other’s paths. Radar can see several cars ahead, but not a shielded pedestrian, unfortunately. Bluetooth technologies were tested at one time as a way of tracking pedestrians. A sensor built into the car could detect a pedestrian on the basis of his or her mobile device. “It is more realistic, though, that street cameras will be preferred for this purpose in the future, as they will logically see farther and communicate the information to the passing cars,” concludes the expert.
Furthermore, we were interested in the experts’ opinions about fully or semi-autonomous vehicles in urban traffic being identified as such. The expert from Hella CZ thinks that an autonomous vehicle should be made distinctive in traffic so that pedestrians or other drivers know that the car is self-controlled and the driver thus does not necessarily need to look at the road ahead. He considered the options: “In terms of the color spectrum, there are not many possibilities left. Blue is taken by the rescue and law enforcement services; white is present in lights; yellow is used for signaling; and red is used for rear marker lamps.” One of the few colors of the visible spectrum that is not taken yet is green. One possibility would thus be an RGB strip fitted around the entire vehicle in such a way that after “the right function is turned on, an illuminated string of lights would run along the car, as one could already see on certain autonomous AUDI prototypes”. On the other hand, other experts hold that at this point, it is utterly irrelevant to address the identification of cars which are not here yet, let alone when at the moment the development is more inclined towards semi-autonomous cars, or moreover to be operated on roads that would be off-limits for pedestrians. The identification of the cars is also opposed by an expert who finds it discriminatory and argues that “those cars will adhere to the Traffic Code and their driving will be set very conservatively because of the emphasis on safety”. Such a car, for example, will never put itself in a situation which it will assess as dangerous on the basis of its calculations. This is supported by another expert who notes that “autonomous cars are mainly programmed defensively, which means that they seek to foresee things, and when they see a screened area, for example, they would rather slow down”. “The whole system is primarily designed in such a way as to ensure maximum safety for pedestrians.”
Let us conclude by summarizing our respondents’ ideas of what urban road traffic might look like in about 20 years. “Traffic itself does not seem likely to change because it is determined by people’s need to travel rather than by technical improvement of cars. But if there are autonomous cars, we can expect it to be more fluent”… “Theoretically, the accident rate will go down and, I hope, the air will improve thanks to a greater number of electric cars.” The increase in the number of electromobiles is subscribed to by another expert, who also wishes for car traffic to be pushed out of city centers. Moreover, he expects that what he refers to as “autonomous people-movers” “will start emerging in cities, replacing taxi services, partly public transportation, and, to some degree, individual ownership of cars”. Another expert, too, expressed an optimistic outlook for the future: “In 20 years, there will be more autonomous vehicles and structure paths for pedestrians to walk or cross safely; there will be a lower possibility of accidents and collisions.” Finally, another expert is reluctant to make predictions but expects a growing trend in using car-sharing services. He thinks, however, that “progress is not likely to be so quick as to see any radical changes”. Additionally, if autonomous cars are in use by then, it will still take several years to renew the car fleet.
4. Discussion and Conclusions
The questions we wanted to answer in this paper were how to protect pedestrians with the help of vehicle technology, and how pedestrians–but also car drivers–perceive and accept such technology. We considered that the most important group to ask concerning acceptance and perception of ADAS by pedestrians are the pedestrians themselves. They, in general, consider timely warning to drivers concerning the (potential) relevant presence of pedestrians to be useful. What is considered best concerning perception is not so clear. All solutions from multi-channel (acoustic, visual, vibration) to simple mono-channel–where acoustic sound is preferred–are referred to more or less positively. Chips on pedestrians or other ways to detect them electronically are rather not accepted, with the note that most people have mobile phones, and maybe one could make use of those. Concerning the electronic marking of pedestrians, this raises the question of how visitors, old people, or children can be integrated into such a system. Whether pedestrians want highly automated or autonomously running cars to be marked or not is not really clear, either. A small majority is in favor of marking cars. The answer that can be given to the question of whether pedestrians would accept ADAS is a “yes”. The answers to the question of which types of information they think they would perceive best are quite heterogeneous and not conclusive. Thus, the features of such a system still have to be experimented with in order to find the best solutions. With respect to their preference concerning the marking of automated/autonomous cars, there is a slight majority that is in favor of marking such cars. However, the sample is small. Thus, more, and more specific, research is needed here.
Almost all the drivers who were interviewed already knew about ADAS systems, and a large part of them also knew about systems that specifically aim at the safety of pedestrians. Many of them have practical experience with ADAS of all types that are not specifically there for the protection of pedestrians, but only a small portion has experience with the practical functioning of such systems. There is general agreement that such a system is useful, which one might interpret as acceptance. However, as is also the case with the pedestrians who were interviewed, there is no clear preference for any features that such systems should have. An interesting aspect, though, is that quite a few of the car drivers consider automated slowing down of the car in the case of a dangerous situation involving pedestrians as an option.
The experts express a wide range of opinions concerning all the aspects in question, specifically, the acceptance and perception of ADAS to protect pedestrians and the question of marking autonomous cars. One could sum up that ADAS in general are considered useful. ADAS especially for pedestrians are, of course, to be seen as something positive as a concept, but maybe there is no really great need to put too much effort into the development of specific systems, as all of the other systems that help to prevent collisions help to prevent collisions with pedestrians as well. Concerning the marking of automated/autonomous cars, the position of the experts is not clear, either as is precisely the case with pedestrians and car drivers.
From our study, we may conclude that systems to protect pedestrians, i.e., to avoid collisions of cars with pedestrians, are considered useful by all groups, though with somewhat different implications. With respect to the features of such systems, the considerations are very heterogeneous, and experimentation is needed in order to develop optimal systems, but a decisive argument put forward by some of the experts is that autonomous vehicles will have to be programmed extremely defensively. What will this do to the traffic flow in densely inhabited areas [21]? Starting from these arguments, we conclude that we need more discussion concerning typical pedestrian-car interaction, in order to find ADAS solutions that make traffic both smooth and safe.
As traffic safety is generally perceived as important, the acceptance of systems to protect pedestrians is not unexpected. What is rather surprising is the fact that this support was not as clear as expected. We hypothesize that this has something to do with the acceptance of new technologies in general, and people’s tendencies to stick to solutions they have experience with.
In order to explain the process of accepting new technologies, many theories and models have been proposed over the years. For any new technology, there are many variables that affect individuals’ decision-making process about how and when they will use it [22]. Theories were developed to study the acceptance of new technology by individuals and to show their ability to adopt new technology depending on the concepts of psychology. In a scoping review of theories of behavior and behavior change by Davis et al. [23], 82 theories were identified. Of those 82 theories, just four were represented in 174 (63%) of all articles: the Transtheoretical Model of Change (TTM; N = 91; 33%), the Theory of Planned Behavior (TPB; N = 36; 13%), Social Cognitive Theory (SCT; N = 29; 11%), and the Information-Motivation-Behavioral-Skills Model (IMB; N = 18; 7%).
According to those theories, people tend to enjoy things which can be done effortlessly. One could say that most people are working on “autopilot mode”. Habits are formed to help run this “autopilot”, placing us in a comfort zone. Stepping out of one’s comfort zone requires conscious efforts and actions. The fear of the unknown, the fear of failure, and the fear of the risks involved make us hesitate when confronted with new “experiments” and dissuade us from extending the boundaries of our comfort zone [24].
Psychology theory shows that four things are needed in order to enable individuals to start and complete a change of behavior. The basis of changing a mindset is, according to Kotter [25], that
- the individual can see the purpose of the change and agree with it
- a rewards and recognition system supports the new behavior
- the individual has the skills for the new behavior
- key people who are role models are perceived as models for the new behavior
To adopt new ways of acting, a person must align his/her beliefs to his/her expectations. Once the person finds the new behavior desirable, action will follow. People need to understand how they fit into the proposed change, and what the implications are of both changing and not changing.
Concerning autonomous driving, the development of the related ADAS will allow cars to perform maneuvers progressively over the next few years until total autonomy is achieved, while requiring the presence of a driver ready to intervene in cases of need [26]. It is necessary to pay special attention to the issues connected with the safety of vulnerable road users, especially pedestrians in urban settings.
It is well known that automated driving will cause extensive changes, so it is imperative to guarantee that society is ready for it [26] and that the safety of all road users is guaranteed.
5. Study Limitations and Further Research
The limitations of the study are the small samples of car drivers and pedestrians and the shortcomings in the recruiting and sampling process resulting from limited time and resources. These shortcomings are not decisive for an exploratory study such as this one. However, the results presented here lead us to think that an extended study in more cities or even in more countries with larger samples and more elaborate recruiting and sampling processes would be worthwhile. More experts should be asked as well. We are thinking mainly of social scientists in this respect. They should help to provide a better-integrated picture of the acceptance of new technology by individual persons and the expected societal effects of the implementation of new systems. There could be interdependencies between those two. Knowledge about such issues could help to accompany the implementation processes in such a way that the outcome for society is optimized.
Author Contributions
Conceptualization, M.Š. and R.R.; methodology, M.Š.; validation, M.Š., K.H.; formal analysis, K.H.; investigation, K.H.; resources, M.Š.; writing—original draft preparation, M.Š., R.R., K.H.; writing—review and editing, M.Š. All authors have read and agreed to the published version of the manuscript.
Funding
This work received financial support for university research provided by the Ministry of Education of the Czech Republic, project No. FF_2020_020.
Institutional Review Board Statement
Ethical review and approval were waived for this study, due to the fact, that study did not included vulnerable citizens nor dealt with sensitive or strictly personal information.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
The data presented in this study are available on request from the corresponding author. The data are not publicly available due to privacy restrictions.
Conflicts of Interest
The authors declare no conflict of interest.
References
- GHSA. Pedestrian Traffic Fatalities by State: 2019 Preliminary Data. 2018. Available online: https://www.ghsa.org/resources/Pedestrians20 (accessed on 23 March 2021).
- World Health Organization. WHO Global Status Report on Road Safety. 2018. Available online: https://extranet.who.int/roadsafety/death-on-the-roads/#vehicles (accessed on 16 December 2020).
- Peiris, S.; Berecki-Gisolf, J.; Chen, B.; Fildes, B. Road Trauma in Regional and Remote Australia and New Zealand in Preparedness for ADAS Technologies and Autonomous Vehicles, AG. Sustainability 2020, 12, 4347. [Google Scholar] [CrossRef]
- Marchau, V.; Wiethoff, M.; Penttinen, M.; Molin, E. Stated preferences of European drivers regarding advanced driver assistance systems (ADAS). Eur. J. Transp. Infrastruct. Res. 2001, 1, 291–308. [Google Scholar]
- Hussain, R.; Zeadally, S. Autonomous cars: Research results, issues, and future challenges. IEEE Commun. Surv. Tutor. 2018, 21, 1275–1313. [Google Scholar] [CrossRef]
- National Highway Traffic Safety Administration. Federal Automated Vehicles Policy: Accelerating the Next Revolution in Roadway Safety; US Department of Transportation: Washington, DC, USA, 2016.
- Deb, S.; Strawderman, L.J.; Vehicleruth, D.W. Investigating pedestrian suggestions for external features on fully autonomous vehicles: A virtual reality experiment. Transp. Res. Part F 2018, 59, 135–149. [Google Scholar] [CrossRef]
- Šucha, M.; Dostal, D.; Risser, R. Pedestrian-driver communication and decision strategies at marked crossings. Accid. Anal. Prev. 2017, 102, 41–50. [Google Scholar] [CrossRef] [Green Version]
- Šucha, M. Road users’ strategies and communication: Driver-pedestrian interaction. In Proceedings of the Transport Research Arena (TRA), Paris, France, 14–17 April 2014. [Google Scholar]
- Palmeiro, A.R.; van der Kint, S.; Vissers, L.; Farah, H.; de Winter, J.C.F.; Hagenzieker, M. Interaction between pedestrians and automated vehicles: A Wizard of Oz experiment. Transp. Res. Part F Traffic Psychol. Behav. 2017, 58, 1005–1020. [Google Scholar] [CrossRef] [Green Version]
- Peters, A. What If Driverless Vehicles Let You cross the Street When You Wave at Them? 2017. Available online: https://wwwfastcompany.com/3068166/what-ifdriverless-vehicles-let-you-cross-the-street-when-you-wave-at-them (accessed on 6 January 2021).
- Lagstrom, T.; Lundgren, V.M. AVIP-Autonomous Vehicles Interaction with Pedestrians. Ph.D. Thesis, Chalmers University of Technology, Gothenborg, Sweden, 2015. [Google Scholar]
- Fridman, L.; Mehler, B.; Xia, L.; Yang, Y.; Facusse, L.Y.; Reimer, B. To Walk or Not to Walk: Crowdsourced Assessment of External Vehicle-to Pedestrian Displays. arXiv 2017, arXiv:1707.02698. [Google Scholar]
- Snyder, J.B. This Self-Driving Vehicle Smiles at Pedestrians. 2016. Available online: https://www.autoblog.com/2016/09/16/this-self-driving-vehicle-smiles-atpedestrians/ (accessed on 7 December 2020).
- Politis, I. Effects of Modality, Urgency and Situation on Responses to Multimodal Warning for Driver; University of Glasgow: Glasgow, Poland, 2016. [Google Scholar]
- Liu, Z.; Pu, L.; Zhu, K.; Lin, Z. Design and Evaluation of V2X Communication System for Vehicle and Pedestrian Safety. J. China Univ. Posts Telecommun. 2015, 22, 18–26. [Google Scholar]
- Mahadevan, K.; Somanath, S.; Sharlin, E. Communicating awareness and intent in autonomous vehicle-pedestrian interaction. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; pp. 1–12. [Google Scholar]
- Ghazizadeh, M.; Peng, Y.; Lee, J.D.; Boyle, L.N. Augmenting the technology acceptance model with trust: Commercial drivers’ attitudes towards monitoring and feedback. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting; SAGE Publications, SAGE CA: Los Angeles, CA, USA, 2012; Volume 56, pp. 2286–2290. [Google Scholar]
- Deb, S.; Strawderman, L.J.; Vehicleruth, D.W.; DuBien, J.; Smith, B.; Garrison, T.M. Development and validation of a questionnaire to assess pedestrian receptivity toward fully autonomous vehicles. Transp. Res. Part C 2017, 84, 178–195. [Google Scholar] [CrossRef]
- Adams, J.A. Cognitive task analysis for unmanned aerial system design. In Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2015; pp. 2425–2441. [Google Scholar]
- Ausserer, K.; Füssl, E.; Risser, R. Kommunikation Zwischen VerkehrsteilnehmerInnen: Einfluss Zunehmender Fahrzeugautomatisierung (Communication between Road Users and the Influence of Increased Car Automation); Factum OG, German Federal Highway Research Institute BASt: Vienna, Austria, 2015. [Google Scholar]
- Fishbein, M.; Ajzen, I. Belief, Attitude, Intention and Behavior: An Introduction to Theory and Research; Elsevier: New York, NY, USA, 1975; p. 578. [Google Scholar]
- Davis, R.; Campbell, R.; Hildon, Z.; Hobbs, L.; Michie, S. Theories of behaviour and behaviour change across the social and behavioural sciences: A scoping review. Health Psychol. Rev. 2015, 9, 323–344. [Google Scholar] [CrossRef]
- Risser, R.; Šucha, M. Psychological Perspectives on Walking: Interventions for Achieving Change; Routledge: London, UK, 2020. [Google Scholar]
- Kotter, J.P. Leading Change; Harvard Business Press: Brighton, MA, USA, 2012. [Google Scholar]
- Arena, F.; Pau, G.; Severino, A. An Overview on the Current Status and Future Perspectives of Smart Cars. Infrastructures 2020, 5, 53. [Google Scholar] [CrossRef]
Figure 1.
SAE levels for vehicle automation from SAE International, 2014. [7].
Figure 1.
SAE levels for vehicle automation from SAE International, 2014. [7].


{kind=link}
Table 1.
Questionnaire–Drivers; sample characteristics.
| n = 70 | Respondents’ Gender | % |
|---|---|---|
| Men | 37 | 52.86 |
| Women | 33 | 47.14 |
| Respondents’ age | ||
| 18–25 years | 39 | 55.71 |
| 26–70 years | 31 | 44.29 |
| Driver’s licence held for | ||
| Less than a year | 1 | 1.43 |
| 1–5 years | 30 | 42.86 |
| 6 years and more | 39 | 55.71 |
Table 2.
Questionnaire–Pedestrians; sample characteristics.
| n = 60 | Respondents’ Gender | % |
|---|---|---|
| Men | 30 | 50 |
| Women | 30 | 50 |
| Respondents’ age | ||
| 16–25 years | 31 | 51.67 |
| 26–70 years | 29 | 48.33 |
| Pedestrians’ distinctive features | ||
| No distinctive features | 50 | 83.33 |
| I often walk with (a) child(ren) | 8 | 13.33 |
| I often push a pram. | 2 | 3.33 |
Table 3.
Drivers’ knowledge and experience with ADAS.
| Have You Ever Heard of ADAS? | Have You Ever Driven a Car with ADAS? | Did You Experience ADAS Preventing Accidents Involving Pedestrians? | |
|---|---|---|---|
| Yes | 53 | 43 | 10 |
| No | 17 | 27 | 60 |
Table 4.
Drivers’ knowledge and experience with different ADAS–frequencies of answers.
| Have You Ever Heard of ADAS? If So, Which? | Have You Ever Driven a Car with ADAS? If So, Which ADAS Was Present? | Did You Experience ADAS Preventing Accidents Involving Pedestrians? If So, Which Ones? | |
|---|---|---|---|
| Automated parking | 12 | 6 | 1 |
| Adaptive Cruise Control | 6 | 5 | 0 |
| Lane Keeping Assistance | 14 | 8 | 0 |
| Blind spot monitors | 8 | 4 | 2 |
| ABS/ESP | 9 | 4 | 3 |
| Forward Collision Warning | 7 | 2 | 0 |
| Collision Warring System | 10 | 4 | 2 |
| Pedestrian Protection System | 4 | 0 | 2 |
Table 5.
Pedestrians’ knowledge of ADAS and preferences for labelling autonomous cars.
| Have You Ever Heard of ADAS? | Do You Consider It Important That Partly or Fully Autonomous Vehicles Are Labelled and Easy to Recognise? | |
|---|---|---|
| Yes | 39 | 33 |
| No | 21 | 24 |
Table 6.
Pedestrians’ knowledge of different ADAS–frequencies of answers.
| Have You Ever Heard of ADAS? If So, Which? | |
|---|---|
| Automated parking | 8 |
| Adaptive Cruise Control | 7 |
| Lane Keeping Assistance | 12 |
| Blind spot monitors | 4 |
| ABS/ESP | 3 |
| Forward Collision Warning | 3 |
| Collision Warning System | 6 |
| Pedestrian Protection System | 6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Šucha, M.; Risser, R.; Honzíčková, K. Advanced Driver Assistant Systems Focused on Pedestrians’ Safety: A User Experience Approach. Sustainability 2021, 13, 4264. https://0-doi-org.brum.beds.ac.uk/10.3390/su13084264
AMA Style
Šucha M, Risser R, Honzíčková K. Advanced Driver Assistant Systems Focused on Pedestrians’ Safety: A User Experience Approach. Sustainability. 2021; 13(8):4264. https://0-doi-org.brum.beds.ac.uk/10.3390/su13084264
Chicago/Turabian StyleŠucha, Matúš, Ralf Risser, and Kristýna Honzíčková. 2021. "Advanced Driver Assistant Systems Focused on Pedestrians’ Safety: A User Experience Approach" Sustainability 13, no. 8: 4264. https://0-doi-org.brum.beds.ac.uk/10.3390/su13084264
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.