
Adaptive Volt-Var Control Algorithm to Grid Strength and PV Inverter Characteristics

 , , , , , ,
, , , , , ,
Abstract
:
1. Introduction
- The presentation of a new algorithm that adapts the volt-var parameters to different network conditions (strong or weak grids) and PV inverter characteristics based on power meter data at the DER level to reduce overvoltage and line loading. Moreover, the algorithm provides different solutions that are based on the PV penetration and power factor levels of the distribution grid.
- The validation of its effectiveness in a laboratory with real equipment and with communication elements, such as RTUs, being a bridge between simulation environments (which is the most common case in the literature) and a large-scale deployment (which will be done further in the SABINA project).
2. Materials and Methodology
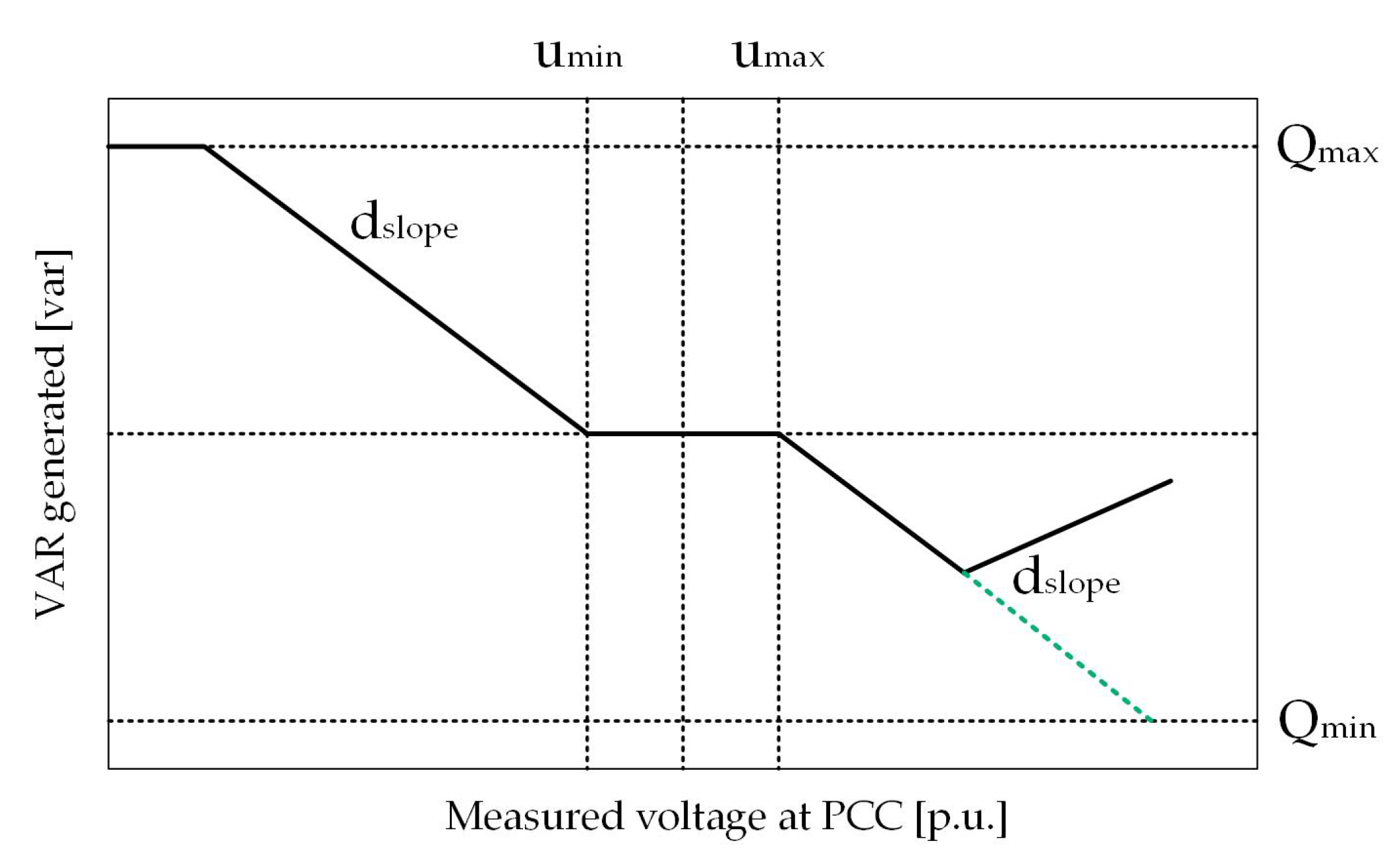
2.1. Adaptive Volt-Var Control Algorithm
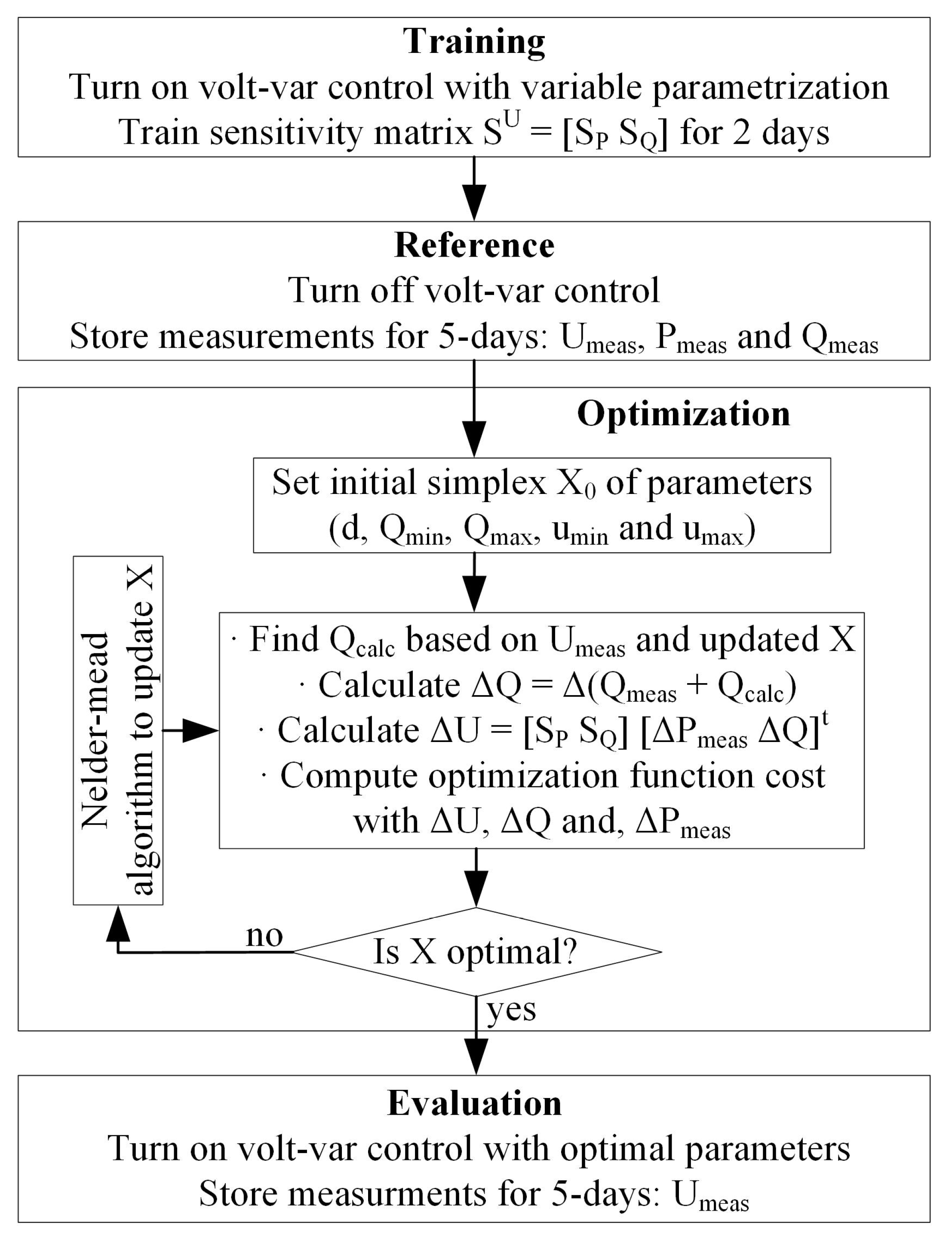
- Training period: the sensitivity matrix is trained setting non-optimal control parameters and monitoring voltage, active and reactive power. The volt-var parameters will vary randomly every minute in a range of pre-defined values, trying to represent an average standard parametrization. The training periodn lasts two days with measurements every minute, having a total of 2880 points.
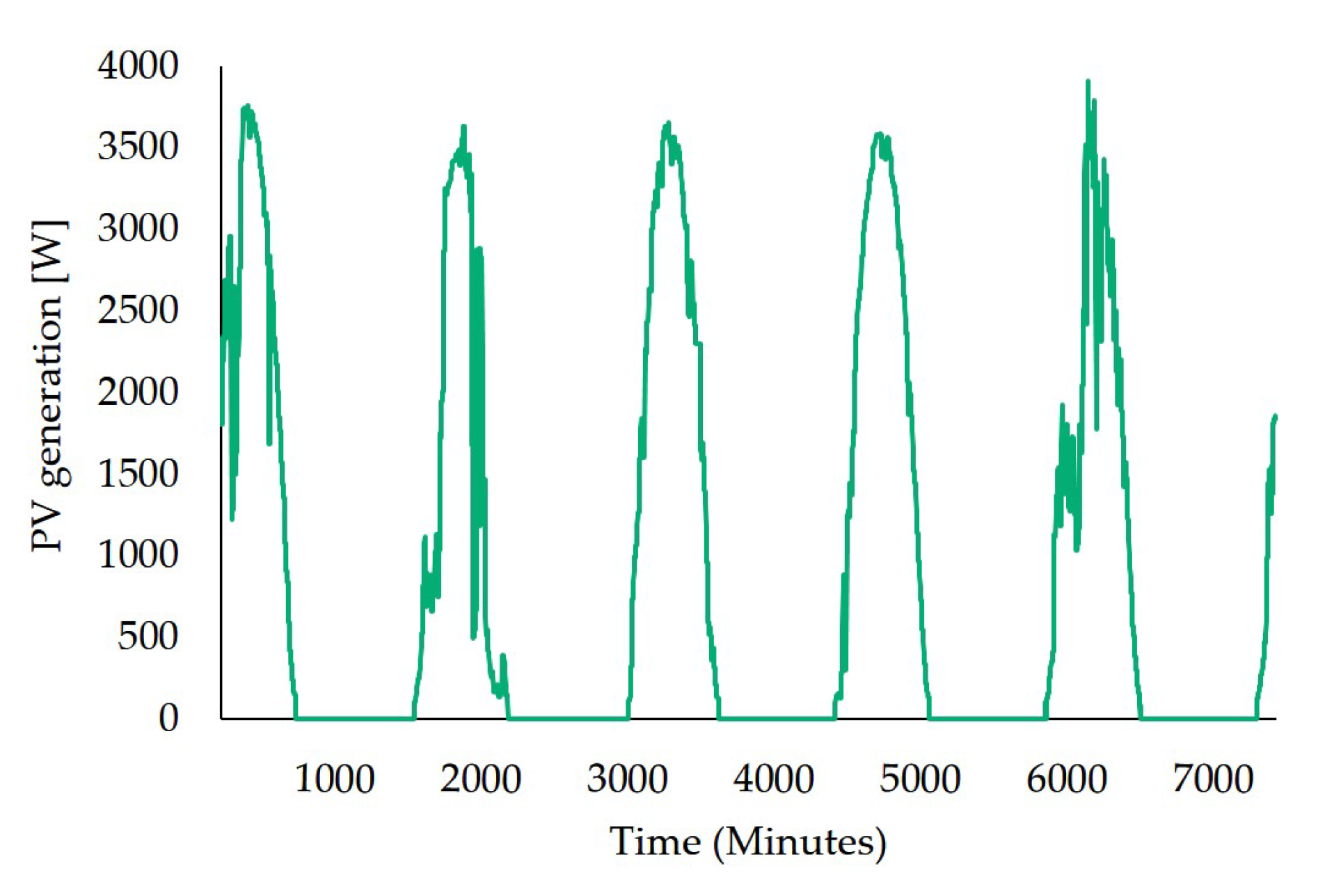
- Reference scenario: the volt-var control is turned off and the voltage, active and reactive power are measured to obtain a reference scenario. These values will be compared with the ones obtained in the scenario with optimized parameters. The reference scenario period lasts five days with measurements every minute, having a total of 7200 points. Even though the active and reactive power are known parameters that are imposed to the PV emulator, as it is explained in Section 4, a mismatch exists between the imposed values and the real ones.
- Offline optimization: the otpimization is done off-line and it follows two steps. First, a black-box model is used to define an initial feasible set of volt-var parameters. Second, the Nelder-mead method is used to obtain the optimal volt-var parameters, where the cost function is a trade-off between minimizing the voltage deviation and the line current increase. In [26], the black-box model and heuristic implementation are detailed and compared with further methodologies, this analysis is out of the scope of this paper.
- Evaluation period: the parameters that are found by the algorithm in step 3 are implemented to the PV inverter. Again, the period of analysis lasts five days with measurements every minute, having a total of 7200 points. These results are compared with the reference scenario ones.
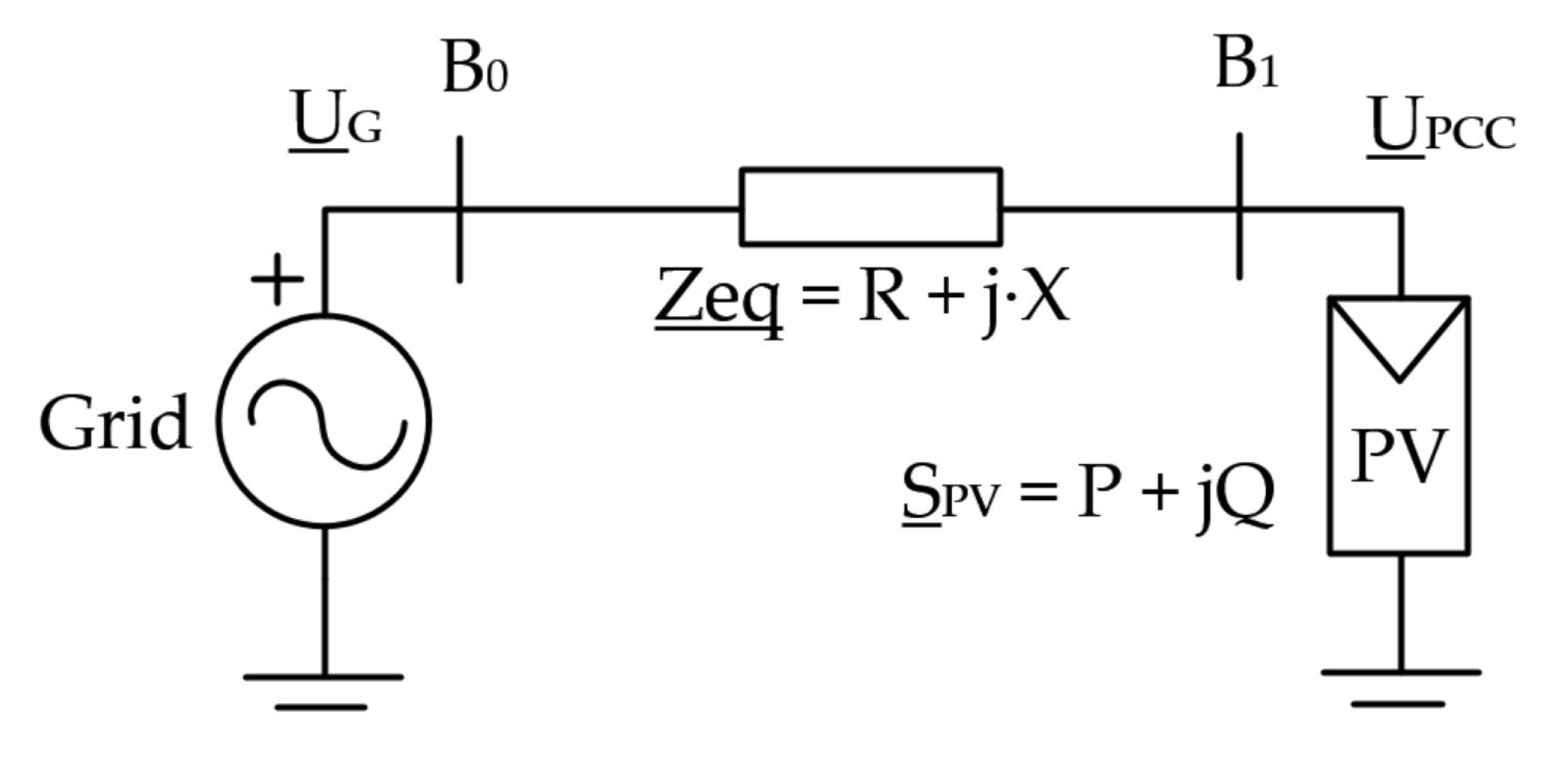
2.2. Two-Bus Equivalent Model
2.3. Energy Smart Laboratory
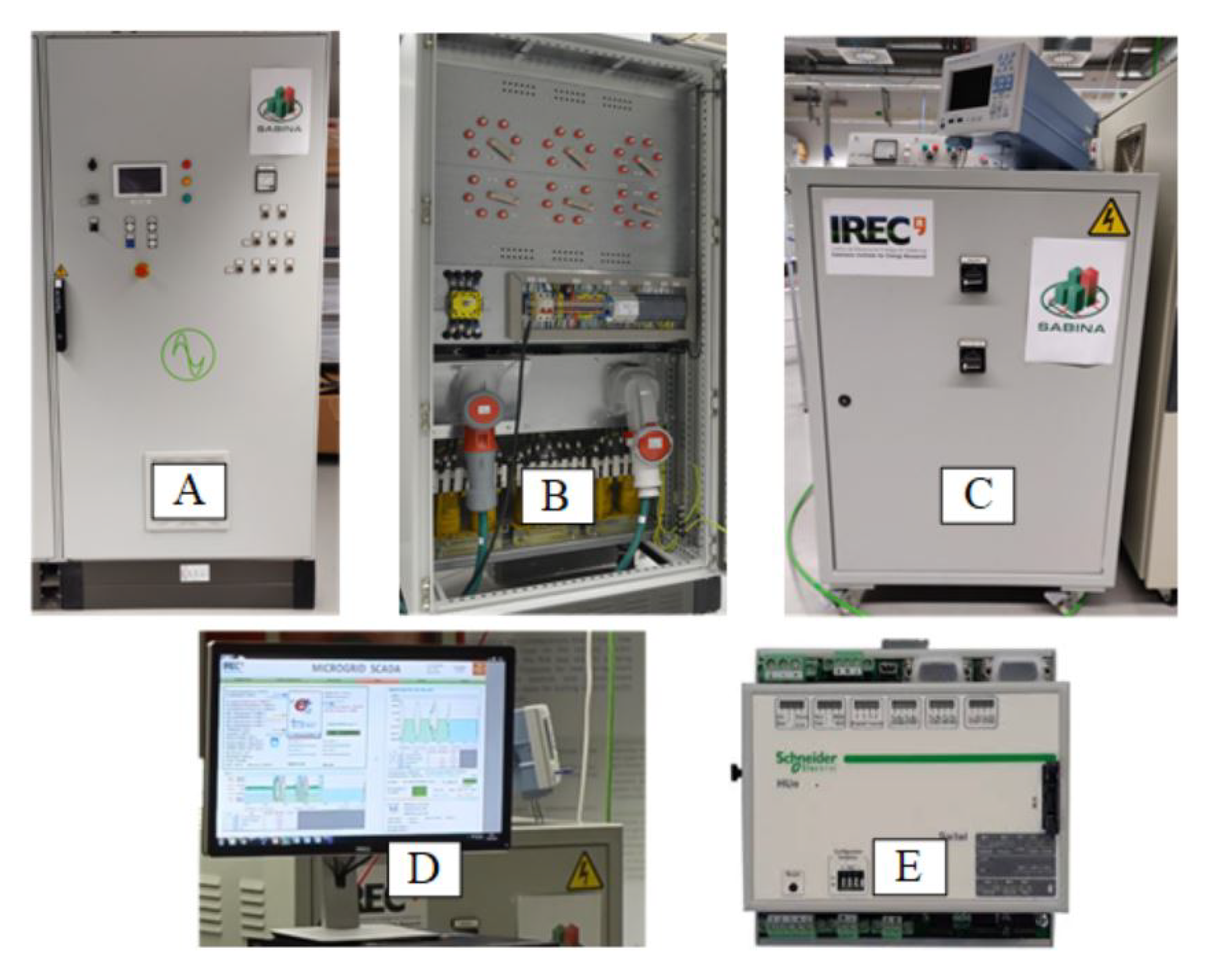
- The power electronics system, in Figure 4, which counts on:
- A grid emulator that acts as voltage source setting up the reference voltage and frequency of the emulated microgrid. For the cases in this study, all of the tests are fixed at 400 V and 50 Hz.
- An emulated distribution line that has variable inductance and resistance in the range from 0 to 20 Ohms for both elements.
- A PV emulator with 4-kVA maximum apparent power.
- The control and communications system, in Figure 5, where we can find:
- A PV emulator adapted to meet the requirements for the study. This emulator calculates the reactive power to absorb based on the parameters of the volt-var curve. The inverter also collects electrical measurements and then sends them to the RTU.
- The Schneider Electric RTU [31] provides the parameters from the volt-var curve once they are calculated depending on the control mode that was selected by the adaptive algorithm. The RTU has the possibility to host the algorithm locally or to use it remotely, in which case the RTU communicates through MQTT to an external server with processing capabilities. A patent in this regard is being published by Schneider Electric.
- A Supervisory Control and Data Acquisition (SCADA) controls the equipment in the experiment and it gathers the monitored information. The communication between the RTU and external server is also tracked.
3. Case Study
3.1. Test Design
- Scenario 1 (S1): refers to a strong grid with short distribution line, this is a grid topology with large SCR and ratio. It represents the scenario in which PV inverters are installed near an electric substation, so it is less sensitive to voltage changes.
- Scenario 2 (S2): refers to a weak grid with a large distribution line, this is a grid topology with small SCR and ratio. It represents the scenario in which PV inverters are installed in remote areas that are more sensitive to voltage changes.
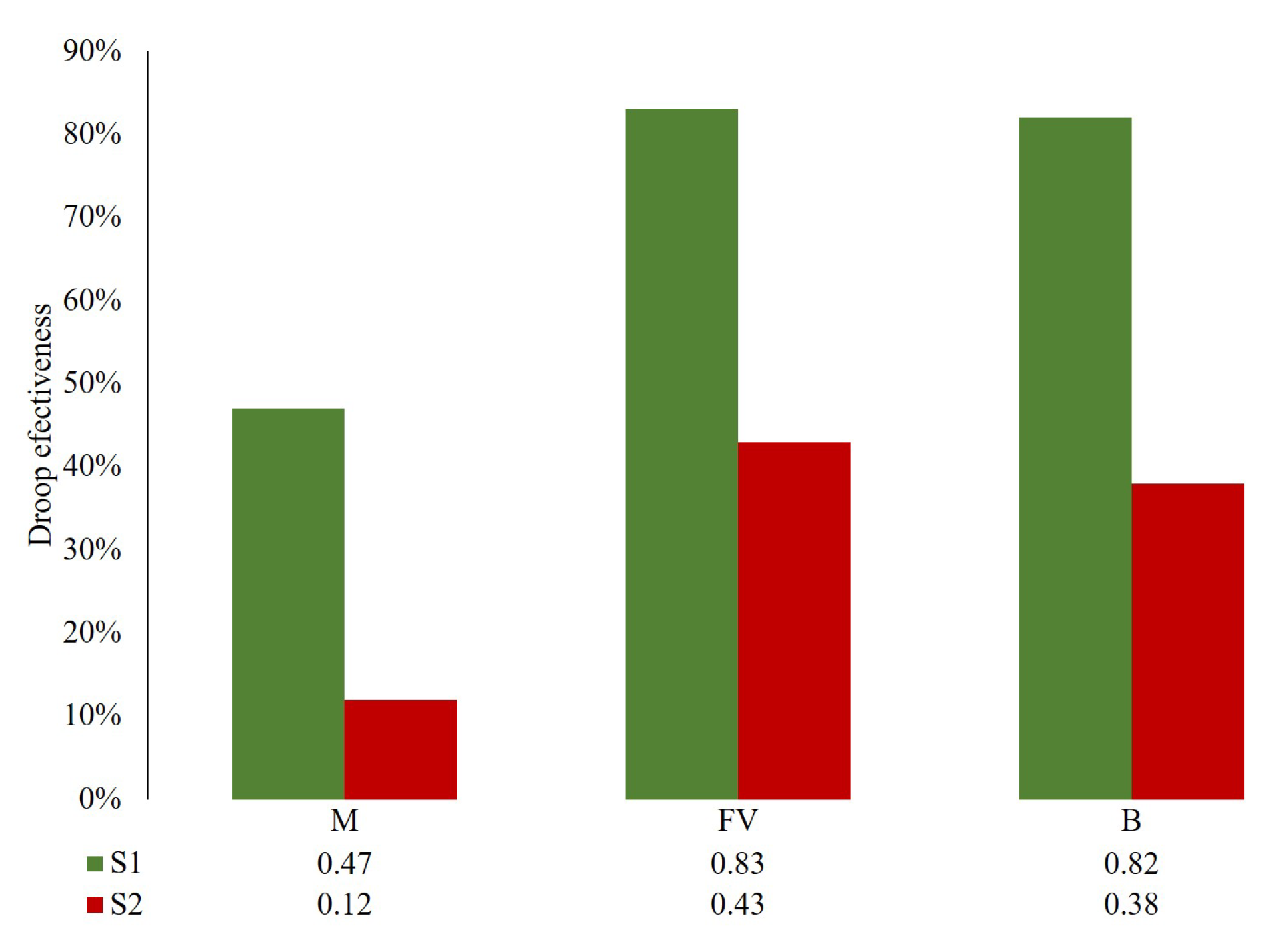
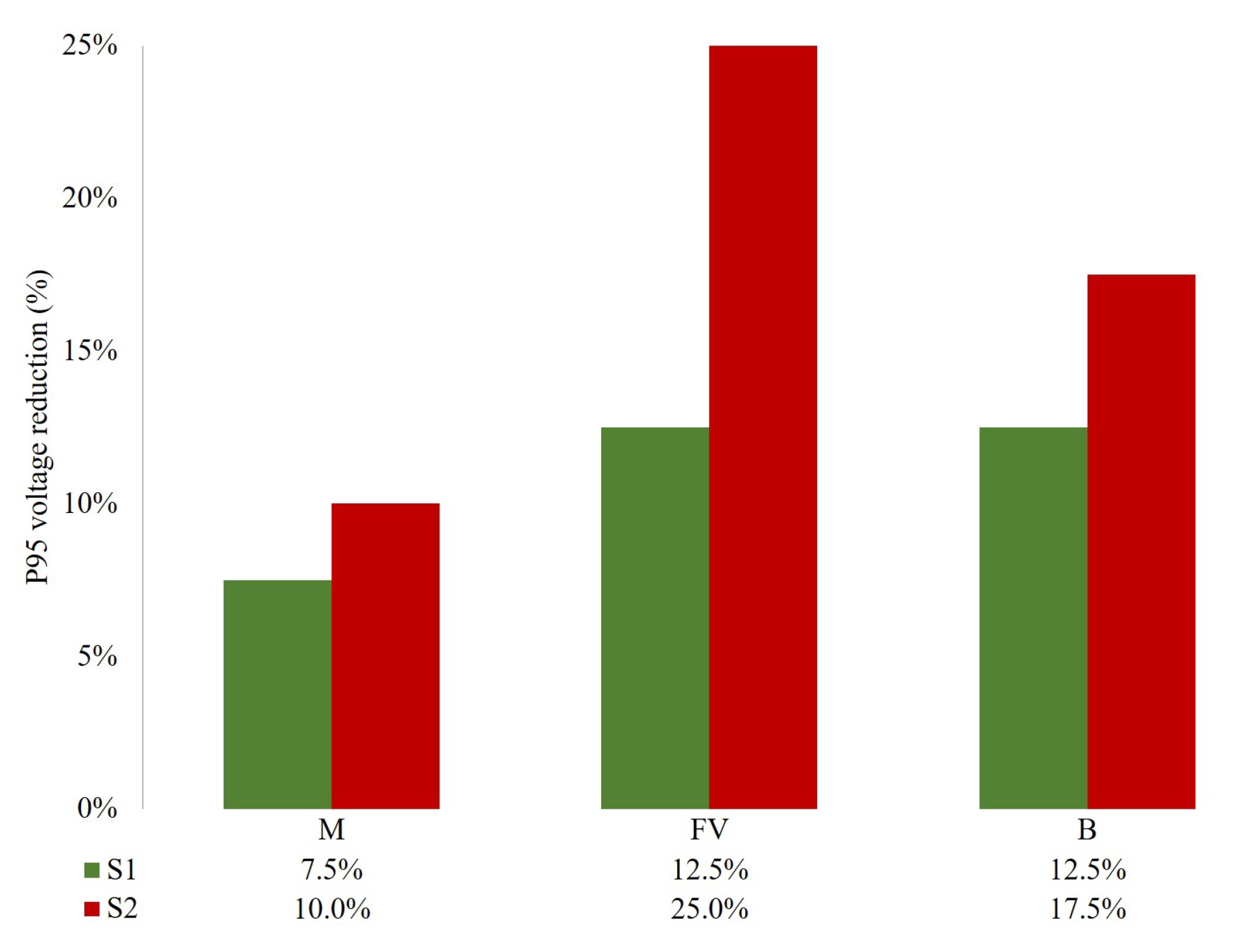
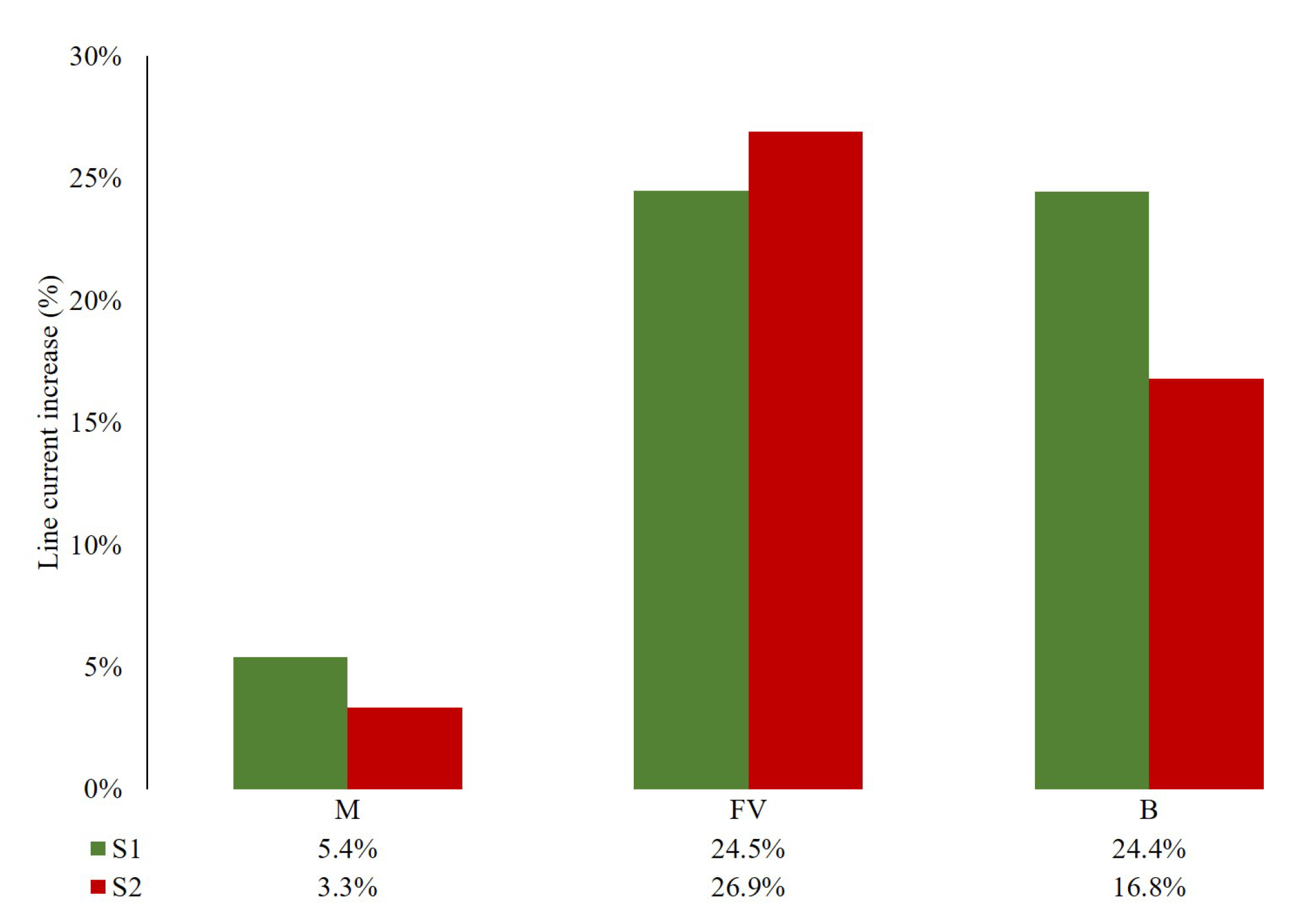
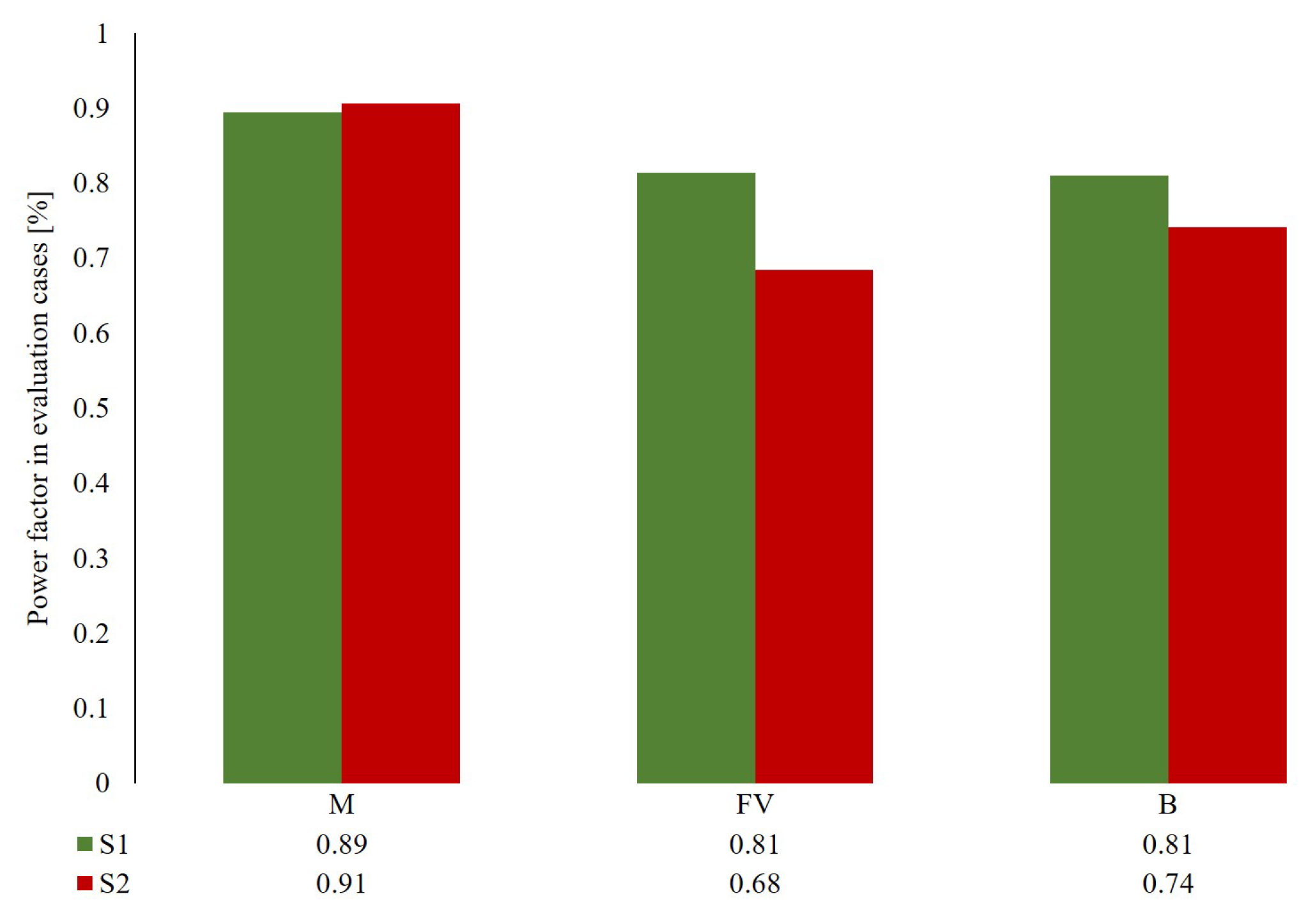
- The mixed (M) mode gives the same weight to the cost function to minimize voltage deviation and line current increase.
- Thefull voltage (FV) mode aims to achieve the maximum voltage reduction compared to any of the other control modes.
- The balanced (B) mode falls between the mixed and the full voltage mode giving more importance to the voltage deviation reduction in the cost function as compared with the mixed mode.
3.2. Key Performance Indicators (KPI)
- Droop effectiveness (volt/volt): indicates how many Volts the reactive power control can reduce compared with the reference period where there is no voltage regulation. The maximum value possible is 1, i.e., for each volt increased at the PCC, the voltage control can reduce it to 1 volt. The minimum value would be 0, which corresponds to the reference case where no volt-var control is applied. The number is obtained when considering all the points that fulfill the following two conditions: the line voltage is higher than and the reactive power less than .
- 95th percentile voltage reductio (%): points out the voltage reduction that a specific volt-var control is able to achieve. To better see its effectiveness, this value is expressed in relation to the maximum voltage deviation allowed by the standards (10% of the nominal voltage), V. The 95th percentile value is taken instead of the maximum voltage value to avoid singular points (i.e., when there is no reactive power availability, the same maximum voltage values are obtained in both the reference and in the evaluation periods). This indicator points out that for 95% of the test, voltage values at the PCC are kept below that number, complying with the EN50160 standard.
- Line current increase (%): this indicator calculates the average line current during 5 days when the voltage is higher than , comparing the reference with the evaluation periods.
- Power factor: is the ratio between the total active power and total apparent power supplied by the inverter. When reactive power control is enabled, the total apparent power increases and, therefore, the power factor reduces. Again, this indicator is calculated as the average for five days when the voltage is higher than .
4. Results and Discussion
4.1. Optimized Volt-Var Parameters
4.2. The Added Value of Going from Simulations to Real Testing
- Unbalanced grid voltage: grid emulator’s power electronics uses the direct-quadrature-zero transformation to simplify its control. This transformation should be used in balanced systems, otherwise, the control will lead to undesired operation of the converter. However, the test was performed having different equipment in each line: metering equipment, PV emulator and distribution line impedance. Because of the unbalanced consumption of those elements, the system was not balanced, so the control parameters in the grid emulator were adjusted to compensate the voltage grid unbalances. It is important to take this fact into account when doing the following step towards the larger-scale pilot site in SABINA and on any other grid environment, as the totally balanced situation is rather unrealistic.
- Oscillating reactive power setpoint: voltage measurements from the internal voltmeter in the PV emulator provide integer values to the control algorithm. This fact caused discontinuities on the reactive power setpoints, leading, in some cases, to an oscillating and inaccurate control. An increase in the sampling time of the voltmeter solved such inaccuracy for laboratory conditions. Nonetheless, larger-scale installations do tend to have even less precise equipment, which should be considered when adapting the algorithm.
- Inaccurate closed-loop control: internal closed-loop control of active and reactive power of PV emulator was not accurate in the whole range of power. Even though the sensors are calibrated and the control adjusted, still there is up to 3% inaccuracy between setpoint and sensor measures. This is expected to occur, even with worse precision, when deploying these solutions at a larger scale in real stablished grids.
4.3. Additional Power Quality Considerations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hu, A.; Levis, S.; Meehl, G.A.; Han, W.; Washington, W.M.; Oleson, K.W.; van Ruijven, B.J.; He, M.; Strand, W.G. Impact of solar panels on global climate. Nat. Clim. Chang. 2016, 6, 290–294. [Google Scholar] [CrossRef]
- Alet, P.J.; Baccaro, F.; De Felice, M.; Efthymiou, V.; Mayr, C.; Graditi, G.; Juel, M.; Moser, D.; Petitta, M.; Tselepis, S.; et al. Quantification, Challenges and Outlook of PV Integration in the Power System: A Review by the European PV Technology Platform. In Proceedings of the 31st European Photovoltaic Solar Energy Conference and Exhibition (EU PVSEC 2015), Hamburg, Germany, 14–18 September 2015. [Google Scholar]
- Chen, P.C.; Salcedo, R.; Zhu, Q.; De Leon, F.; Czarkowski, D.; Jiang, Z.P.; Spitsa, V.; Zabar, Z.; Uosef, R.E. Analysis of voltage profile problems due to the penetration of distributed generation in low-voltage secondary distribution networks. IEEE Trans. Power Deliv. 2012, 27, 2020–2028. [Google Scholar] [CrossRef]
- Mahmud, N.; Zahedi, A. Review of control strategies for voltage regulation of the smart distribution network with high penetration of renewable distributed generation. Renew. Sustain. Energy Rev. 2016, 64, 582–595. [Google Scholar] [CrossRef]
- Delgado-Gomes, V.; Martins, J.F.; Lima, C.; Borza, P.N. Towars the use of Unbundle Smart Meter for advanced inverters integration. In Proceedings of the IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 21 September 2017. [Google Scholar]
- CENELEC. EN 50438 Requirements for Micro-Generating Plants to be Connected in Parallel with Public Low-Voltage Distribution Networks; CENELEC: Brussels, Belgium, 2013. [Google Scholar]
- CENELEC. EN 50160 Voltage Characteristics of Electricity Supplied by Public Distribution Systems; CENELEC: Brussels, Belgium, 2010. [Google Scholar]
- Kashani, M.G.; Mobarrez, M.; Bhattacharya, S. Smart inverter volt-watt control design in high PV penetrated distribution systems. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017. [Google Scholar]
- Eltawil, M.A.; Zhao, Z. Grid-connected photovoltaic power systems: Technical and potential problems—A review. Renew. Sustain. Energy Rev. 2010, 14, 112–129. [Google Scholar] [CrossRef]
- Subburaja, A.S.; Shamim, N.; Bayne, S.B. Battery connected DFIG wind system analysis for strong/weak grid scenarios. In Proceedings of the 2016 IEEE Green Technologies Conference (GreenTech), Kansas City, MO, USA, 6–8 April 2016; pp. 112–117. [Google Scholar]
- Ding, F.; Nagarajan, A.; Chakraborty, S.; Baggu, M. Photovoltaic Impact Assessment of Smart Inverter Volt-VAR Control on Distribution System Conservation Voltage Reduction and Power Quality; National Renewable Energy Laboratory (NREL) Technical Report NREL/TP-5D00-67296; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2016.
- Seuss, J.; Reno, M.J.; Broderick, R.J.; Grijalva, S. Analysis of PV Advanced Inverter Functions and Setpoints under Time Series Simulation; Sandia National Laboratories: Albuquerque, NM, USA, 2016. [Google Scholar]
- Miranda, T.; Delgado-Gomes, V.; Martins, J. On the use of IEC 61850-90-7 for Smart Inverters Integration. In Proceedings of the 2018 International Conference on Intelligent Systems (IS), Funchal, Portugal, 25–27 September 2018; pp. 722–726. [Google Scholar]
- Alet, P.-J.; Adinolfi, G.; Barchi, G.; Bründlinger, R.; Graditi, G.; Henze, N.; Jung, M.; Stavrou, A.; Yang, G. The Inverter: A Multi-Purpose Control Element. In Proceedings of the 36th European Photovoltaic Solar Energy Conference and Exhibition, Marseille, France, 9–13 September 2019. [Google Scholar]
- Llo, A.; Schultis, D.-L.; Schirmer, C. Effectiveness of Distributed vs. Concentrated Volt/Var Local Control Strategies in Low-Voltage Grids. Appl. Sci. 2018, 8, 1382. [Google Scholar]
- Yang, D.; Wang, X.; Liu, F.; Xin, K.; Liu, Y.; Blaabjerg, F. Adaptive reactive power control of PV power plants for improved power transfer capability under ultra-weak grid conditions. IEEE Trans. Smart Grid 2019, 10, 1269–1279. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.-S.; Kim, G.-H.; Lee, J.-D.; Cho, C. New Requirements of the Voltage/VAR Function for Smart Inverter in Distributed Generation Control. Energies 2016, 9, 929. [Google Scholar] [CrossRef] [Green Version]
- Takasawa, Y.; Akagi, S.; Yoshizawa, S.; Ishii, H.; Hayashi, Y. Effectiveness of updating the parameters of the Volt-VAR control depending on the PV penetration rate and weather conditions. In Proceedings of the IEEE Innovative Smart Grid Technologies-Asia, Auckland, New Zealand, 4–7 December 2017. [Google Scholar]
- Schultis, D.-L.; Ilo, A. Behaviour of Distribution Grids with the Highest PV Share Using the Volt/Var Control Chain Strategy. Energies 2019, 12, 3865. [Google Scholar] [CrossRef] [Green Version]
- Alkuhayli, A.; Hafiz, F.; Husain, I. Volt/Var control in distribution networks with high penetration of PV considering inverter utilization. In Proceedings of the 2017 IEEE Power and Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017. [Google Scholar]
- Jahangiri, P.; Aliprantis, D.C. Distributed Volt/VAr Control by PV Inverters. IEEE Trans. Power Syst. 2013, 28, 3429–3439. [Google Scholar] [CrossRef]
- Jones, C.B.; Lave, M.; Reno, M.J.; Darbali-Zamora, R.; Summers, A.; Hossain-McKenzie, S. Volt-Var Curve Reactive Power Control Requirements and Risks for Feeders with Distributed Roof-Top Photovoltaic Systems. Energies 2020, 13, 4303. [Google Scholar] [CrossRef]
- Santos-Martin, D.; Lemon, S. Simplified Modeling of Low Voltage Distribution Networks for PV Voltage Impact Studies. IEEE Trans. Smart Grid 2016, 7, 1924–1931. [Google Scholar] [CrossRef]
- European Comission, SmArt BI-Directional Multi eNergy gAteway. Available online: https://sabina-project.eu (accessed on 10 January 2020).
- Li, S.; Sun, Y.; Ramezani, M.; Xiao, Y. Artificial Neural Networks for Volt/VAr Control of DER Inverters at the Grid Edge. IEEE Trans. Smart Grid 2019, 10, 5564–5573. [Google Scholar] [CrossRef]
- Martin, W.; Stauffer, Y.; Ballif, C.; Hutter, A.; Alet, P. Automated Quantification of PV Hosting Capacity in Distribution Networks under User-Defined Control and Optimisation Procedures. In Proceedings of the 2018 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Sarajevo, Bosnia and Herzegovina, 21–25 October 2018. [Google Scholar]
- Fawzy, T.F.; Bletterie, B.; Deprez, W.; Buelo, T.; Bettenwort, G.; Engel, B. New strategies for coordinated control in power distribution grids—Effective integration of photovoltaic plants utilizing sensitivity analysis. In Proceedings of the 48th International Universities Power Engineering Conference (UPEC), Dublin, Ireland, 2–5 September 2013. [Google Scholar]
- Demirok, E.; Pablo, C.G.; Sera, D.; Rodriguez, P.; Teodorescu, R. Local Reactive Power Control Methods for Overvoltage Prevention of Distributed Solar Inverters in Low-Voltage Grids. IEEE J. Photovolt. 2011, 2, 174–182. [Google Scholar] [CrossRef]
- Taddeo, P.; Colet, A.; Carrillo, R.E.; Canals Casals, L.; Schubnel, B.; Stauffer, Y.; Bellanco, I.; Corchero Garcia, C.; Salom, J. Management and Activation of Energy Flexibility at Building and Market Level: A Residential Case Study. Energies 2020, 13, 1188. [Google Scholar] [CrossRef] [Green Version]
- Marzband, M.; Sumper, A.; Ruiz-Álvarez, A.; Domínguez-García, J.L.; Tomoiaga, B. Experimental evaluation of a real time energy management system forstand-alone microgrids in day-ahead markets. Appl. Energy 2013, 106, 365–376. [Google Scholar] [CrossRef]
- Schneider Electric. Available online: https://www.se.com/ww/en/product-range-download/62685-saitel-dr-remote-terminal-unit-26-controller/#/documents-tab (accessed on 10 January 2020).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Year | Contribution |
|---|---|---|
| [9] | 2010 | Presents problems to connect PV in a grid |
| [3] | 2012 | Analysis of voltage profile problems due to DR penetration |
| [4] | 2016 | Review of control strategies for voltage regulation |
| [10] | 2016 | Presents the main indicators of the grid topology |
| [11] | 2016 | Expression to quantify the overvoltage of a single DER |
| [12] | 2016 | Simulates the efficiency of volt-var control techniques |
| [17] | 2016 | Voltage regulation can be used to minimize line-losses |
| [20] | 2016 | Simulations of Volt-var regulation at grid scale |
| [5] | 2017 | Indicates how to do testing in laboratories. No implementation |
| [8] | 2017 | Indicates the possibility of inverters to regulate voltage |
| [18] | 2017 | Analyzes the benefits of adapting the parameters |
| [13] | 2018 | Presents centralized management of volt-var control techniques |
| [15] | 2018 | Theoretical and simulation analysis of local volt-var control |
| [23] | 2018 | Simplified power system in a two-bus equivalent model |
| [14] | 2019 | Presents centralized management of volt-var control techniques |
| [16] | 2019 | Adaptive reactive power control for PV for ultra-weak grids |
| [19] | 2019 | Analysis of the behavior of grids with high PV deployment |
| using volt-var control chain Strategies | ||
| [21] | 2019 | Simulations of Volt-var regulation at grid scale |
| [25] | 2019 | Use of Artificial Neural Networks for Volt-var control |
| [22] | 2020 | Hundreds of loads and generation simulations to evaluate |
| the impact of control methods |
| SCR Ratio | Ratio | R [] | X [] | |
|---|---|---|---|---|
| S1 | 18.1 | 3 | 0.7 | 2.1 |
| S2 | 9.0 | 0.5 | 4.0 | 2.0 |
| Test | T1 | T2 | T3 | T4 | T5 | T6 |
|---|---|---|---|---|---|---|
| Scenario | 1 | 2 | 1 | 2 | 1 | 2 |
| Training | x | x | ||||
| Reference | x | x | ||||
| Optimization | x | x | x | x | x | x |
| Evaluation | x | x | x | x | x | x |
| Optimization mode | M | M | FV | FV | B | B |
| Test | Scenario | Optimization Mode | Droop | [pu] | [var] |
|---|---|---|---|---|---|
| T1 | 1 | M | 5.789 | 1.001 | −794 |
| T2 | 2 | M | 35.69 | 1.001 | −2114 |
| T3 | 1 | FV | 1.000 | 1.005 | −1694 |
| T4 | 2 | FV | 7.748 | 1.005 | −4000 |
| T5 | 1 | B | 1.001 | 1.010 | −2999 |
| T6 | 2 | B | 8.030 | 1.010 | −1364 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gubert, T.C.; Colet, A.; Casals, L.C.; Corchero, C.; Domínguez-García, J.L.; Sotomayor, A.A.d.; Martin, W.; Stauffer, Y.; Alet, P.-J. Adaptive Volt-Var Control Algorithm to Grid Strength and PV Inverter Characteristics. Sustainability 2021, 13, 4459. https://0-doi-org.brum.beds.ac.uk/10.3390/su13084459
Gubert TC, Colet A, Casals LC, Corchero C, Domínguez-García JL, Sotomayor AAd, Martin W, Stauffer Y, Alet P-J. Adaptive Volt-Var Control Algorithm to Grid Strength and PV Inverter Characteristics. Sustainability. 2021; 13(8):4459. https://0-doi-org.brum.beds.ac.uk/10.3390/su13084459
Chicago/Turabian StyleGubert, Toni Cantero, Alba Colet, Lluc Canals Casals, Cristina Corchero, José Luís Domínguez-García, Amelia Alvarez de Sotomayor, William Martin, Yves Stauffer, and Pierre-Jean Alet. 2021. "Adaptive Volt-Var Control Algorithm to Grid Strength and PV Inverter Characteristics" Sustainability 13, no. 8: 4459. https://0-doi-org.brum.beds.ac.uk/10.3390/su13084459