
Review of Intelligent Road Defects Detection Technology


1
Shandong Hi-Speed Construction Management Group Co., Ltd., Jinan 250014, China
2
School of Qilu Transportation, Shandong University, Jinan 250002, China
3
Suzhou Research Institute, Shandong University, Suzhou 215000, China
*
Authors to whom correspondence should be addressed.
Sustainability 2022, 14(10), 6306; https://0-doi-org.brum.beds.ac.uk/10.3390/su14106306
Submission received: 30 April 2022
/
Revised: 18 May 2022
/
Accepted: 19 May 2022
/
Published: 22 May 2022
Abstract
:Road defects are important factors affecting traffic safety. In order to improve the identification efficiency of road diseases and the pertinence of maintenance and management, intelligent detection technologies of road diseases have been developed. The problems of high cost and low efficiency of artificial inspection of road diseases are solved efficiently, and the quality of road construction is improved availably. This is not only the guarantee of highway quality but also the guarantee of people’s lives and safety. This study focuses on the intelligent detection of road disease and summarizes the commonly used detection equipment in the intelligent detection technology of road diseases, which include cameras, GPR, LiDAR, and IMU. It systematically describes the evolution and development of road disease detection technology. This study analyzes the common problems existing in road disease detection technology and proposes corresponding improvement suggestions. Finally, the development trend of road detection technology is discussed, which has practical significance for the future development of road detection technology.
1. Introduction
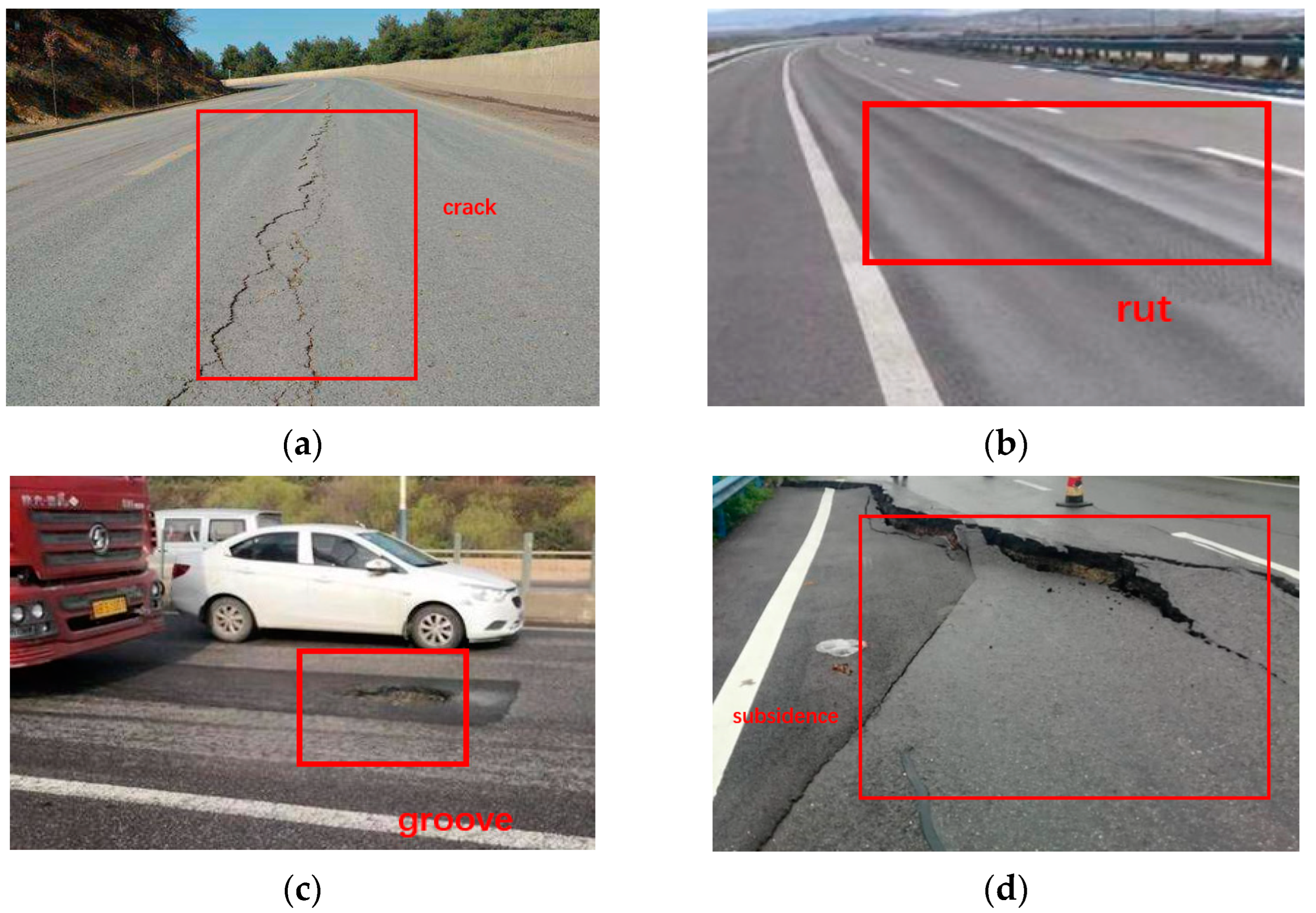
The quality of roads can directly affect the development of the city. With the erosion of roads caused by rain and vehicles, various defects may appear on the road surface, such as cracks, ruts, grooves, and subsidence [1]. The common types of pavement defects are shown in Figure 1.
Cracks are one of the most common diseases on the pavement. It mainly has transverse cracks, longitudinal cracks, and reticular cracks. It is extremely harmful to the road surface. Especially in winter and spring, due to the infiltration of rain and snow water, the road disease that is already in a crack state is more serious under the action of driving load [2]. Ruts are the permanent grooves in the road surface under the repeated action of vehicle loads [3]. This is mainly due to the unreasonable design of the asphalt mixture gradation or insufficient compaction during construction. This can make the road surface drainage poorly on rainy days, and the driving vehicle is prone to drifting and affecting the safety of high-speed driving. The grooves [4] are mainly formed due to the lack of timely maintenance after the surface layer is cracked, which has the potential to cause a flat tire in a moving vehicle and cause a traffic accident. These defects can bring damage to the vehicles on the road. Uneven or irregular roads can lead to tire wear. What is more, it can lead to a flat tire and cause a traffic accident. To ensure driving safety, the funding for road maintenance is increasing every year [5]. Identifying road defects timely is important for pavement maintenance. Manual inspection is intuitive with the high cost and low efficiency. In order to solve this problem, various intelligent detection methods for road surface defects detection have been developed [6]. However, there is a lack of studies summarizing the advantage and disadvantages of those intelligent detection methods.
Therefore, this paper conducted a comprehensive literature review on intelligent road defects detection technology. Firstly, the data collection methods of pavement defects, including cameras, ground-penetrating radar (GPR), Light Detection and Ranging (LiDAR), and an inertial measurement unit (IMU), were introduced. The data processing methods, including fitting, a support vector machine (SVM), convolutional neural network (CNN), and decision tree, were then discussed. Finally, it summarized and prospected the development of road defects detection technology.
2. Data Collection
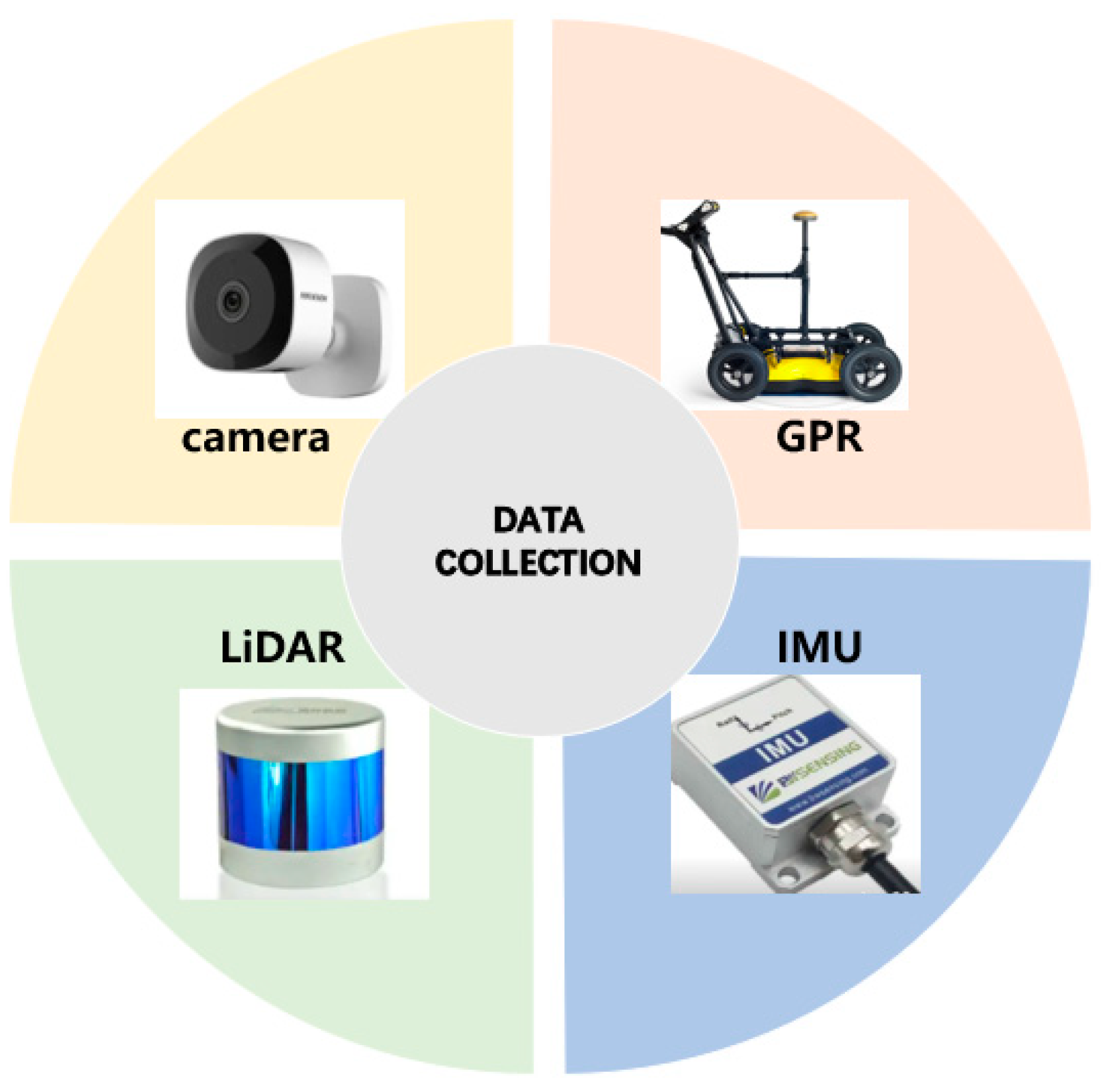
Data collection is the first but important step for road defects detection. Road defects data can be obtained by different devices, such as cameras, ground-penetrating radar, LiDAR, IMU, etc. [7,8,9,10], as shown in Figure 2.
2.1. Camera
Many researchers used cameras for pavement image collection [11,12,13,14,15]. The image can then be used for pavement texture analysis [16], pavement crack detection [17], and asphalt mixture crack detection [18]. Y. Du et al. [19] collected a large number of pavement defect images, including timestamp and location information, using car-mounted cameras. Repeated collection and overlapping of pavement defects images were found during the collection process. Therefore, a feature matching and image mosaic method for pavement disease detection based on multi-vehicle images was proposed. Tang [20] developed intelligent road inspection equipment with existing road inspection vehicles installed with cameras. The qualitative and quantitative assessment of road surface quality can be then achieved. Du et al. [21] used the high-resolution industrial cameras installed on vehicles to collect pavement images. The detection and classification method of pavement diseases based on the You Only Look Once (YOLO) network was combined. Grabowski, D. et al. [22] proposed a method for estimating pavement conditions based on images obtained from onboard cameras. A set of algorithms was created to process images from depth cameras and RGB (red, green, blue) cameras. The neural network model was trained by video samples from the camera for road defects classification. Studies showed that the processing accuracy of the application of digital image processing technology reached more than 80%. Jahanshahi, M. R. et al. [23] used RGB-D sensors to detect and quantify pavement defects. The sensor system consisted of an RGB color image, an infrared projector, and a camera as a depth sensor. Combined with the corresponding algorithm, the automatic detection of road diseases such as cracks and potholes can be completed. In addition, the global positioning system was combined with the proposed system to locate the detected defects. It can be used as an auxiliary sensor system for road surface assessment vehicles. Cui, X et al. [24] used profiling and digital image technology to achieve a three-dimensional reconstruction of asphalt pavement contours. Image processing technology helped to locate the precise coordinates of each point on the model. According to the contour method, a comprehensive calculation program for texture depth was established.
With the development of unmanned aerial vehicles (UAVs), more and more pavement engineers or researchers are starting to install cameras on UAVs for the detection of various road diseases [25,26,27], as shown in Figure 3. Junqing, Z. et al. [28] proposed that the road detects information were collected by drones using high-resolution cameras. A drone platform for road surface image acquisition was assembled, and the flight settings were studied to obtain optimal image quality. The acquired images were processed and annotated for model training. Combined with the YOLOv3 algorithm, the average accuracy (MAP) of data processing was 56.6%. Zhijian, M. et al. [29] analyzed the development technology of unmanned aerial vehicles in the field of intelligent transportation to improve the accuracy of road surface disease detection. A framework for road disease recognition and perception based on drones was constructed. The Yuneec H520 UAV was used to collect road surface image data, and the road surface disease image preprocessing technology based on wavelet threshold transformation was analyzed. Inzerillo, L. et al. [30] used data collected by drones to analyze structural self-motion (SfM) techniques at different heights. This technology was applied to old pavements on the campus of the University of Palermo. The technology accurately identified pavement diseases and developed an integrated approach to optimizing pavement management strategies.
Cameras are widely used in pavement disease detection technology. It has a high dynamic range and resolution, and it is inexpensive. However, the imaging of the camera is greatly affected by the lighting conditions of the road surface under test. The light intensity is too strong, too weak, or the light is uneven and is not conducive to imaging. In order to ensure that the system can work properly in any environment, auxiliary lighting equipment needs to be configured to provide uniform lighting conditions and ensure image quality. Moreover, the camera provides only 2D information and lacks depth information, which is not conducive to a more comprehensive analysis of the problem [29,31,32].
2.2. GPR
Compared to the camera, GPR detection technology [33,34] is more efficient for identifying roadbed diseases. This method does not need to destroy or excavate road surfaces and can effectively overcome the concealment of roadbed diseases.
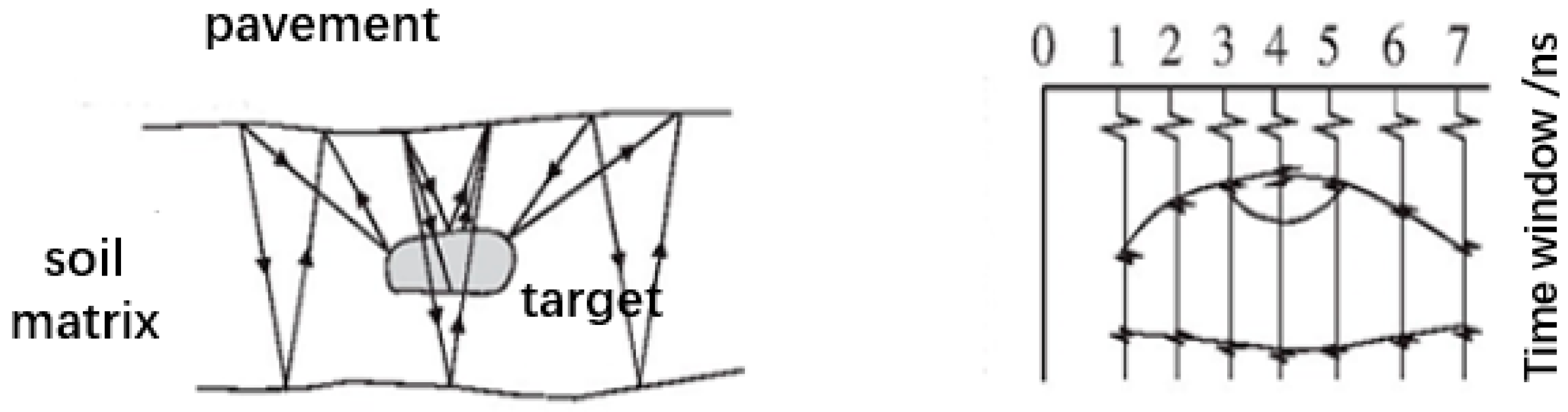
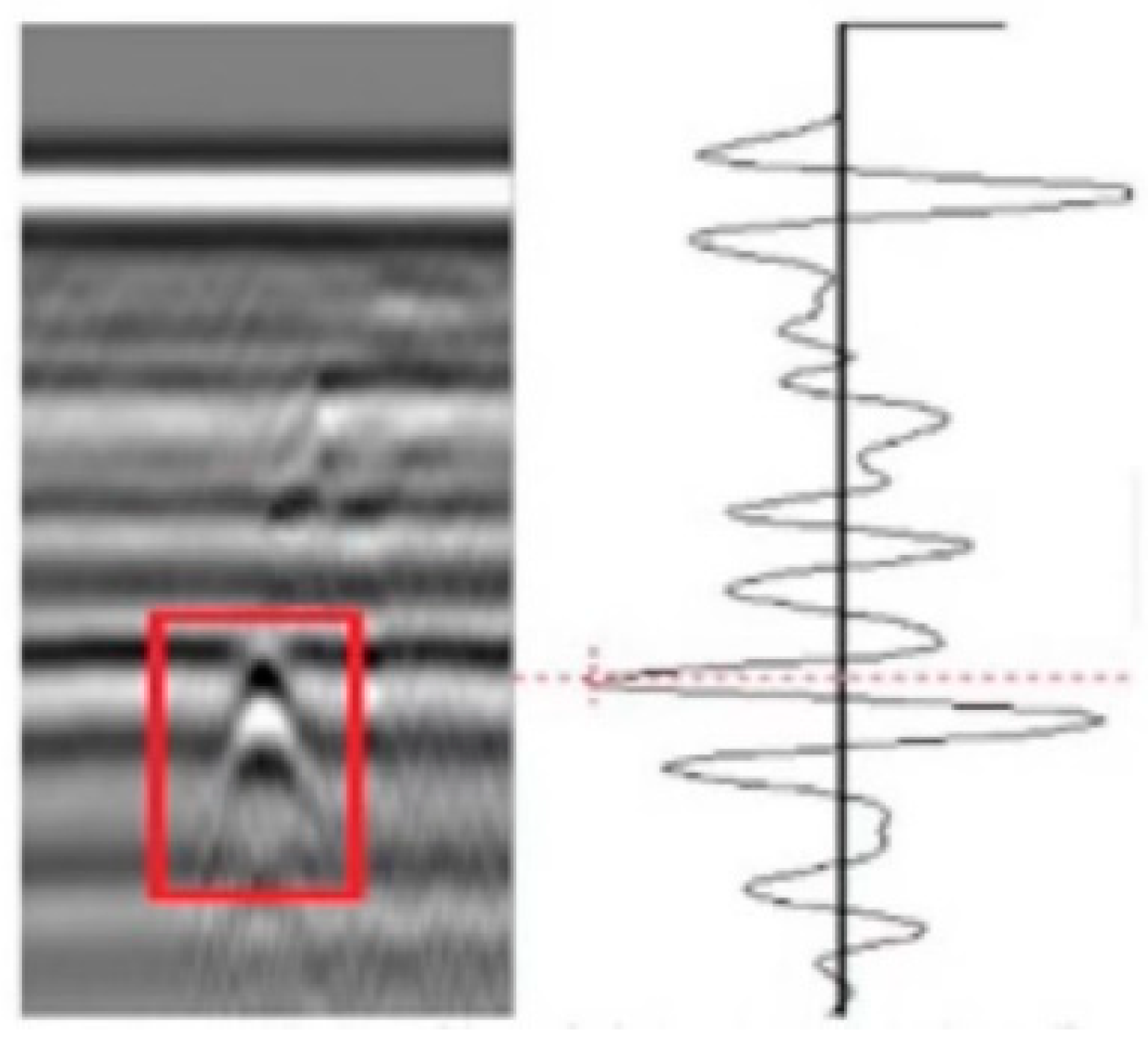
Road disease detection is an important basis for road maintenance and maintenance. Although the conventional drill core sampling method can achieve the purpose of pavement inspection, the detection results of this method are not comprehensive, and the damage to the pavement is large. As an efficient non-destructive testing technology, ground-penetrating radar offers the possibility of non-destructive testing of road diseases. Zhu et al. [35] discussed the effects of diseases such as road surface reflection cracks, subsidence, and uneven pavement on ground-penetrating radar image results, as shown in Figure 4 and Figure 5. Based on the influence of diseases on the image results of ground-penetrating radar and the detection results of ground-penetrating radar, the types and causes of road lesions in a certain section of the highway were successfully analyzed. Gao, J. et al. [36] used ground-penetrating radar (GPR) for road surface damage detection. Data processing in conjunction with the faster R-ConvNet algorithm to complete the task. The results showed that the accuracy was 89.13%. The stability of this model was better under different road structures. One of the problems encountered when conducting non-destructive testing of the road surface with ground-penetrating radar is the detection of multi-layered reflectors in the echoes of ground-penetrating radar. Lahouar, S. et al. [37] solved this problem by iteratively detecting strong reflections in GPR signals by using threshold or match filter detectors. The detected pulses were then used in the reflection model to synthesize a signal that is “similar” to the measured ground-penetrating radar signal in the least-squares sense. The synthesized signal was then subtracted from the measured signal to show the faint reflections that were masked. Then these reflections were detected iteratively using the same method. After testing, the study can be successful in disease detection. To test and evaluate the field application effect of asphalt pavement ground-penetrating radar rapid detection technology, Zhang et al. [38] conducted on-site test research based on the key points and implementation process of on-site detection technology. They relied on physical engineering and analyzed the accuracy of the detection results. The results showed that the compaction of the asphalt surface layer detected by ground-penetrating radar on-site was relatively accurate. The relative error can be controlled by 1%. The on-site detection results of the pavement disease ground penetrating radar were consistent with the scoring results, and the scanning image of the ground-penetrating radar can clearly reflect the structural condition of the asphalt pavement. To study the defect detection and identification of the road surface by ground-penetrating radar (GPR), Huang et al. [39] proposed a method with obvious effects on improving abnormal resolution and singular value decomposition by embedding metal plates at the interface of each layer in the surface of the road surface. It was applied to road field detection. The results showed that this can reduce the amount of work processing data and increase the accuracy of the detection.
Ground-penetrating radar is a non-destructive and fast method of pavement detection. It mainly has the following characteristics [40]. Its adaptability is strong. Geological radar can be safely applied to the city or construction site of the engineering site by the use of non-destructive testing technology. The working conditions are more relaxed. Its anti-interference ability is strong, and its anti-electromagnetic interference ability is strong [41]. It can work in various noise environments in the city and is less affected by the bad environment. Its positioning is fast and accurate. It has better inspection depth and resolution and can provide real-time cross-sectional views directly with clear and intuitive images [42]. It uses a laptop to control the acquisition, recording, storage, and processing of data for ease of portability. However, the big data obtained by the ground-penetrating radar delay the processing time, which leads to problems such as subjectivity in data interpretation [43,44].
2.3. LiDAR
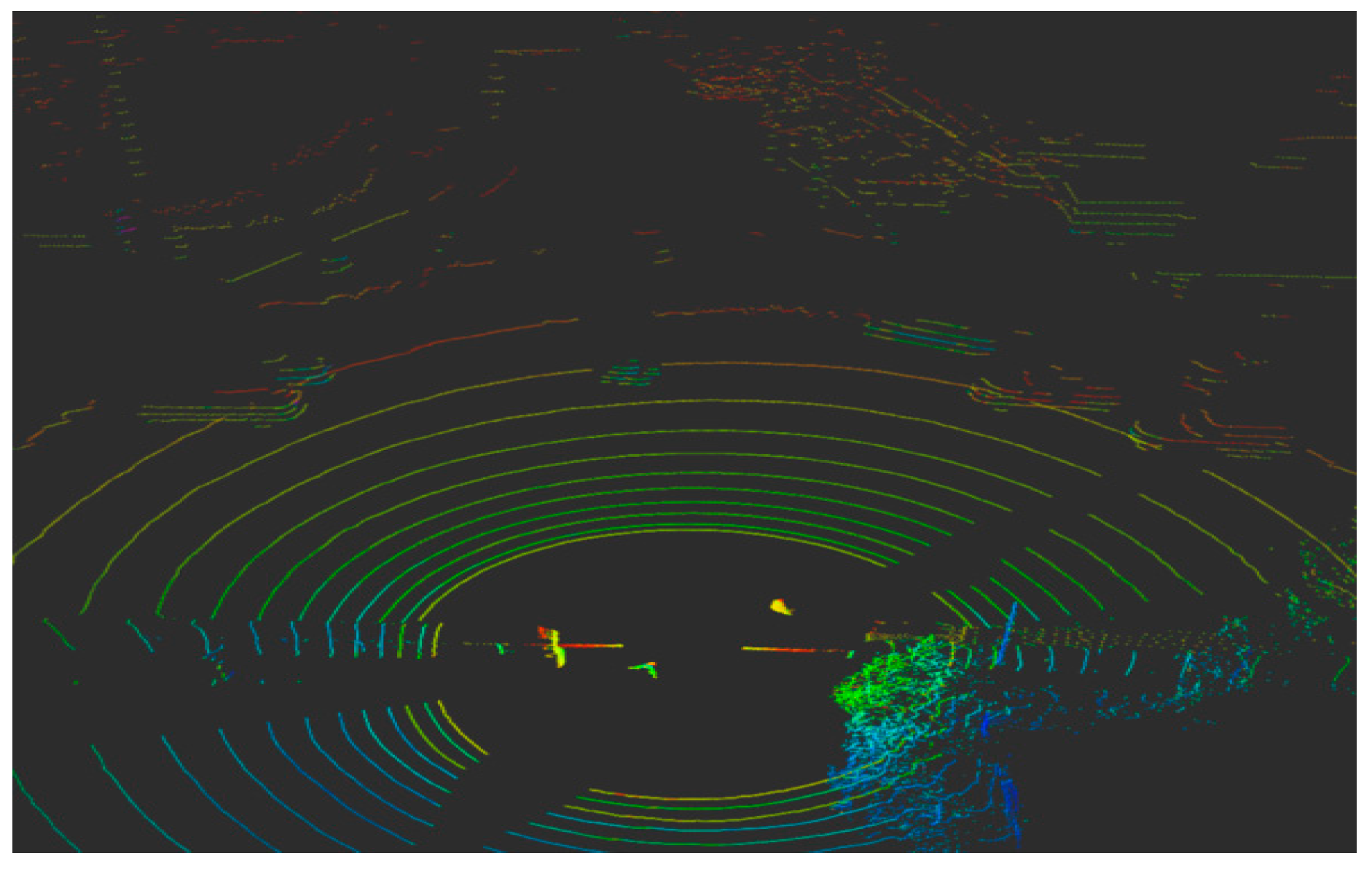
LiDAR is an emerging device for road surface defects detection with the unique advantages of high precision, high resolution, high automation, and high efficiency [45,46], as shown in Figure 6.
Zhang et al. [47] conducted data comparison and analysis on the stability of the specified laser road condition detection equipment from three angles (flatness, surface section construction depth, and rut) in ordinary roads and special test roads. The applicability of laser detection was demonstrated. Suggestions and methods for improving the reliability of equipment detection were proposed. Zhao [48] proposed a change detection method based on a digital elevation model and density map by using point cloud data obtained by vehicle-mounted LiDAR scanning. After verification, the detection accuracy of this method can reach 93.1%. M.Bellone et al. [49] detected the uneven position on the road by studying the driver warning system. LiDAR was used to generate the environment in the form of a three-dimensional (3D) point cloud, which was analyzed and processed based on a normal vector and presented to the driver in the form of a traversable grid. Li et al. [50] adopted line laser technology to construct a 3D data acquisition system for pavement and collected high-resolution (0.5 mm) 3D pavement depth data. Yan et al. [51] used LiDAR to detect road irregularity information. Road environmental information was extracted and segmented by the network structure of random sampling and local feature aggregation. In order to solve the problem of the loss of key features in the process of road environment information segmentation, a local feature aggregator was added to increase the acceptance domain of each 3D point cloud to retain geometric details. The results showed that the method could accurately identify the road environment information, and the recognition accuracy of the convex hull, pit, and drivable area can reach 71.87%, 82.71%, and 93.01%, respectively. Jiang et al. [52] took advantage of the three-dimensional data of the pavement to propose an enhanced dynamic optimization algorithm to improve crack segmentation. The four most common types of pavement cracks (longitudinal, transverse, block, and crocodile-like) were tested. Experimental results showed that the average calculation time of the algorithm was greatly shortened. At the same time, cracks in multiple directions were better handled, and the accuracy of crack segmentation was improved. Song [53] took the three-dimensional line laser technology as the research object and analyzed its system composition and working principle. Comprehensively engineering examples were introduced to discuss its application effect in road rutting detection and the factors affecting the detection results so as to provide a reference for road rutting detection. Guo et al. [54] applied the new three-dimensional laser detection technology with high precision and high density, and the indoor rutted pattern simulation equipment was developed to quantitatively evaluate the detection accuracy and reliability of the non-uniform 13-point laser rutting detection equipment for the problem of rut depth. The results showed that the detection error and dispersion of the 13-point laser detection equipment for the bump type rut were significantly higher than those for the detection of no bump rut, and the relative error exceeded 5%. Hu et al. [55] used a non-uniform 13-point laser detection device to obtain cross-sectional data from 110 sets of measured rutted vehicles. The effect of lateral offset of multi-point laser detection vehicles on the error of depth detection of rutted vehicles in different forms was studied. To evaluate the pavement quality completely and intuitively, Wang et al. [56] proposed a three-dimensional pavement detection method based on a laser displacement sensor and gyroscope. The results showed that the method can measure the pavement shape of the entire lane with high detection accuracy and fast detection speed.
The detection distance of LiDAR is long, and the angle measurement accuracy is high. What is more, the resolution is high, and the viewing angle is wide. However, it is susceptible to natural light and thermal radiation, and it is greatly disturbed in weather such as rain and fog, wind and sand, etc. The working environment requirements are high, and the cost is high [57,58,59].
2.4. IMU
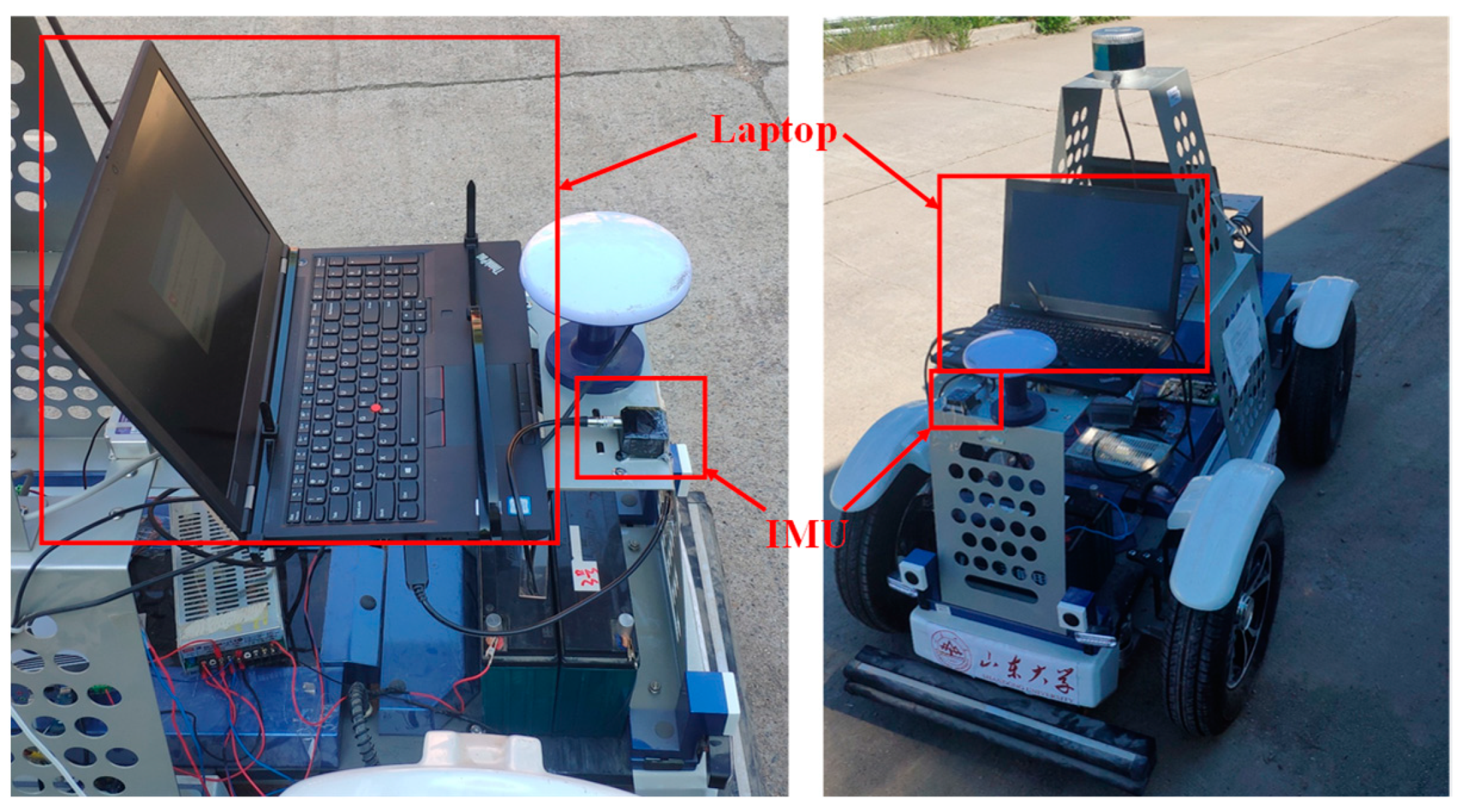
The IMU installed on the detection vehicle can detect whether the road surface is damaged by analyzing the data of the acceleration sensor, angular velocity sensor, and other components [60,61,62], as shown in Figure 7. Acceleration changes, angular velocity changes, and attitude changes in the process of vehicle movement can all be collected by IMU, which requires a small amount of calculation and can achieve high accuracy [63,64,65].
M. et al. [66] presented a road surface defect identification system based on 3D accelerometers, a global positioning system (GPS), and video modules deployed on vehicles. Anthony et al. [67] applied IMU and laser to evaluate road roughness and generate road profile, improving the accuracy of vehicle-based longitudinal road profilometer in road roughness and large texture evaluation. Christodoulou et al. [68] inputted acceleration and angular velocity data into the designed artificial neural network to distinguish potholes on the road, and the detection accuracy was about 90%. In order to solve the drift problem of velocity and avoid affecting the accuracy of calculation and target positioning, a method for velocity and displacement calculation based on stable numerical integration was proposed by Kong et al. [69] The results showed that this method can reduce the drift error and improve the accuracy of the integral results.
IMU is an autonomous system that does not rely on any external information and does not radiate energy to the outside. It is well concealed and is not affected by external electromagnetic interference. Plus, it can work at all times. It has a high data update rate, short-term accuracy, and stability. However, because the navigation information is generated by integration, the positioning error increases with time, it requires a long initial alignment time before each use, and the price of the device is expensive [70,71,72,73].
2.5. Section Summary
The advantages and disadvantages of each device are summarized here, as shown in Table 1.
3. Data Processing
Image processing technology is widely used in many research fields such as medicine [74,75], aerospace engineering [76,77], civil engineering [78,79], meteorology [80], biological science [81], transportation science [82]. The commonly used data processing methods in the field of road disease intelligent detection include digital image processes, fitting, support vector machines (SVM), neural networks, and so on.
3.1. Digital Image Process
Methods based on basic image analysis are the more common methods. This method generally does pretreatment work, such as enhancement of the image first. Then the targets are segmented and extracted by thresholds [83]. Finally, the targets are identified and classified. It enables a specific quantitative analysis of the differentiated disease targets, as shown in Figure 8.
The highway is an important meridian to complete the transportation and communication between the various regions. Road cracks are easily caused by natural factors and external forces. Wang et al. [84] proposed a road crack automatic identification and evaluation system based on digital image processing so that the degree of road cracks can be more quickly and accurately determined. The appropriate treatment methods were developed. To improve the recognition speed and recognition rate of highway pavement crack automatic detection and recognition technology based on digital image processing technology, Xiao et al. [85] proposed an adaptive rapid denoising method for enhancing pavement crack images through equalization processing. It can improve the recognition speed. Xu et al. [86] achieved automatic identification of pavement diseases through image preprocessing, disease detection, morphological operations, disease localization, and classification. After comparing and analyzing various edge detection algorithms, the adaptive threshold obtained by the OTSU algorithm was proposed as a high threshold input into the collaborative operation method of Cany’s algorithm. It improved the accuracy of disease detection by about 10% compared with traditional edge detection algorithms. This further improved the practicality of image-based pavement disease detection solutions.
However, due to the particularity of pavement images and the weak signal of disease targets, although researchers have proposed many different treatment methods, there has not been a common and effective method to detect crack diseases on various pavements. This is also a major problem that has plagued researchers. For example, the general disease crack boundary has a certain marginality, so the edge detection method can be used. Abrupt changes in grayscale are detected by using some suitable edge detection operators in the image, reinforcing the information of the crack target. What is more, the overall gray level of the image is corrected so that the light intensity of the entire image becomes uniform, and then use methods of thresholds to segment the target. However, the limitation of these methods is that the crack strength is uncertain. There are too many changes, and it is not easy to divide the target. Moreover, there are too many noise targets that are split, which has a great impact on the subsequent processing results [87,88,89,90].
3.2. Fitting
Road diseases are complex and diverse. There are often many thin and weak cracks in terms of cracks alone, and there are also a large number of reticulated cracks [91].
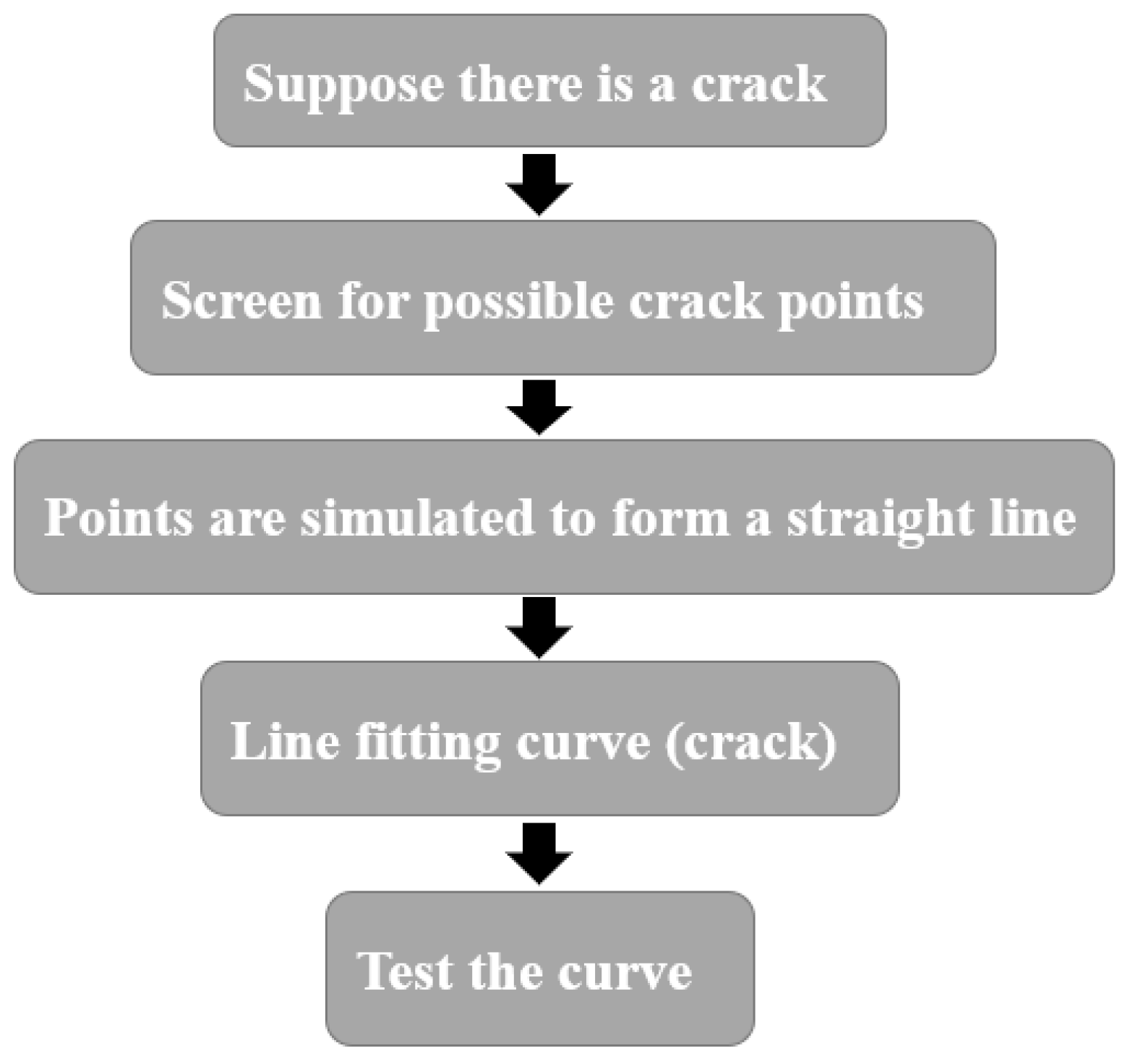
Detection has become difficult by simply taking thresholds to segment the general approach, and disease information must be extracted and identified by other special methods [92]. A single crack is linear. If its width is ignored, it can be thought of as a curve. From the curve fitting theory, it can be seen that the curve can be approximated by segmented straight line segments [93]. Therefore, the possible crack pixels can be considered extracted directly from the grayscale image. Then the cracks are fitted from these points by fitting the method. Finally, the fitted crack target is identified. The false target is discarded, leaving the real crack target [94], as shown in Figure 9.
On the basis of the demonstration and analysis of the depression characteristics of the pavement, Wang et al. [95] proposed the depth, area, edge density factor, slope point identification factor, and other judgment indicators that describe the depression characteristics. By using the fitted datum method, a Matlab automatic identification program was prepared. The correct identification of known pits and subsidences in the 400 m test section was realized. Jianfeng Lu et al. [96] proposed an automatic detection and recognition method for road cracks based on a multi-level fitting mechanism. Firstly, the image was divided into small windows. It can be assumed that it is internal and contains a crack. The crack point was extracted, and then these points were synthesized into a straight line by using the method of fitting a straight line. In the process of fitting a straight line by moving the window continuously, these lines were continuously combined to form a composite curve (cracks) and form a multi-level fitting mechanism. A large number of experimental data showed that the reliability, stability, and universality of this method were satisfactory.
3.3. SVM
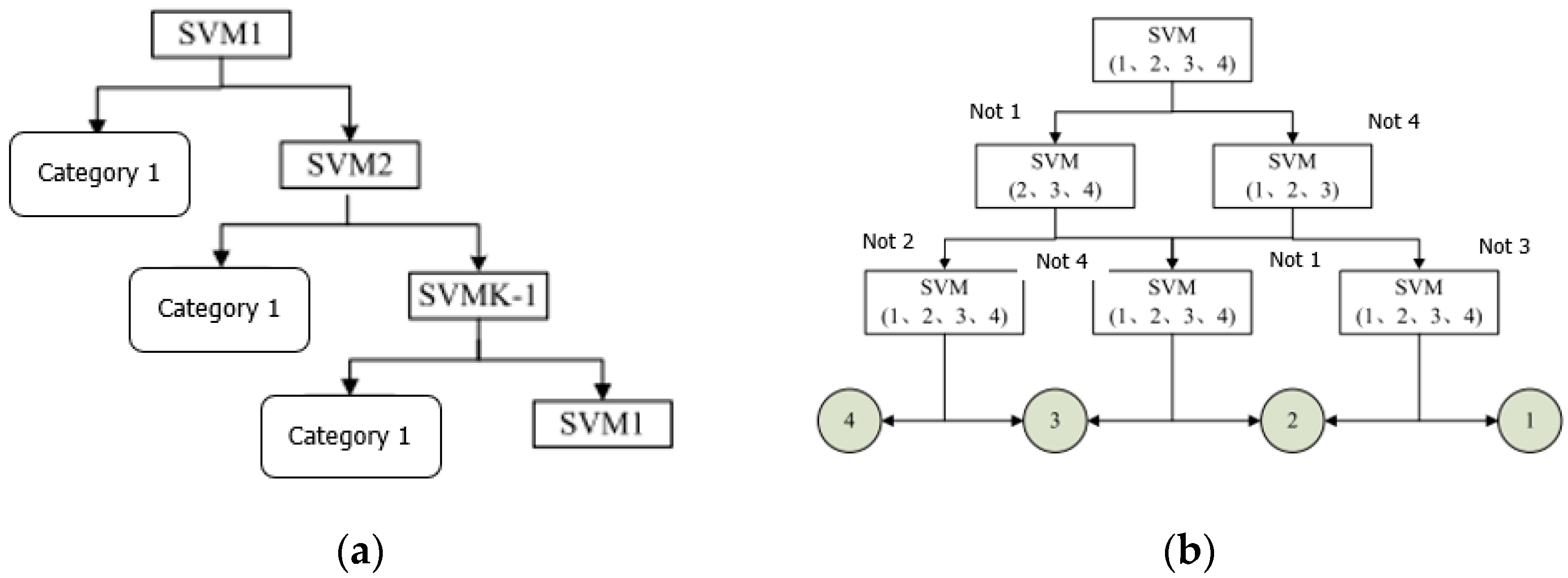
The support vector machine (SVM) is a binary classification model algorithm based on supervised learning [97,98]. The basic principle of operation of the algorithm is to find an optimal classification hyperplane that maximizes the distance between the two samples at the lower edge of this hyperplane. The greater the edge distance, the more the two types of samples are divided, and the results of the classification are better [99]. However, there are usually more than two types of diseases on the road surface, so it is necessary to construct a suitable multi-classifier. At present, the methods of constructing SVM multi-classifiers mainly include the direct method and indirect method [100].
- (1)
- Direct method
The direct method is to modify the objective function directly. Multiple classification questions are combined into one optimization problem. By solving the optimization problem, the multi-classification problem can be solved at once. Although this solution seems simple and easy to understand, it is difficult to implement. The calculation process is complex, and the generalization is poor.
- (2)
- Indirect method
The idea of the indirect method is to achieve the construction of multiple classifiers by combining a variety of binary classification methods. There are two commonly used methods: one-to-many and one-to-one. This is shown in Figure 10.
Wang [101] used the support vector machine (SVM) classification algorithm to study the classification and identification of different diseases. In order to solve the optimization problem of c and g of the super parameters of the SVM algorithm, the mesh search method and the particle swarm optimization algorithm are used to optimize the parameters of the SVM. The classification prediction results of the SVM model obtained by using these two optimization algorithms were 88.333% and 86.667%, respectively. It is found that although the grid search method can still meet the detection requirements, it runs slowly. Although the particle swarm algorithm increased speed, it was easy to fall into the local maximum. Thus, an adaptive variation particle swarm optimization (PSO) algorithm was proposed to improve the original algorithm. The classification prediction of the improved SVM model was 91.667%, which improved the disease recognition rate. To solve the problems of repeated acquisition and multiple overlaps of the same disease in the detection of pavement diseases by cameras, Y. Du et al. [19] proposed a feature matching and image Mosaic method for pavement disease detection based on multi-vehicle images. The mean Euclidean distance (MEUD) and matching rate (MCR) were constructed to identify the duplication between two images. Then support vector machines were used to determine the thresholds of MEUD and MCR. The algorithm solved the problem of road surface disease repetition effectively and provided a reliable method for road surface disease detection in a multi-vehicle cooperative environment.
3.4. Neural Network
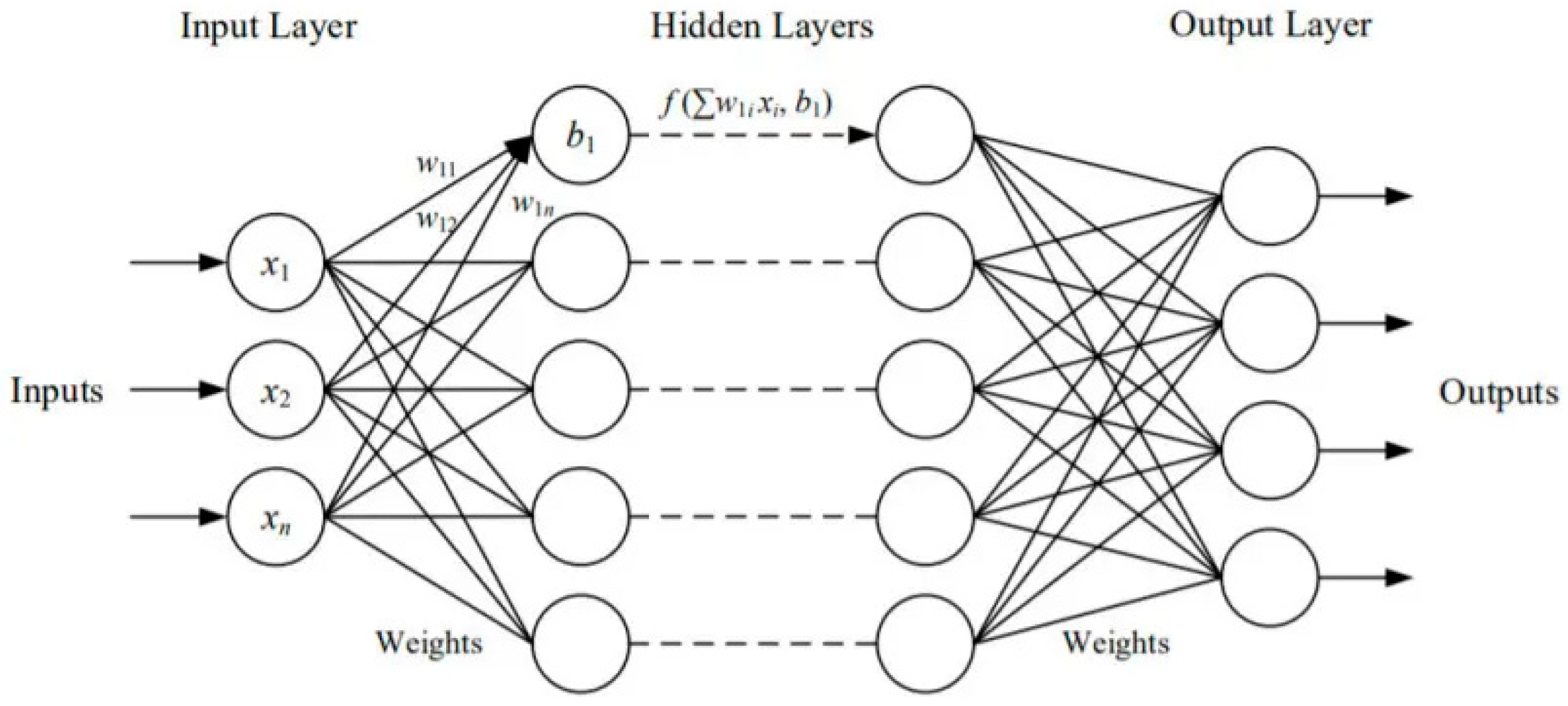
In recent years, as deep learning has been recognized, neural networks as the basis of deep learning have become the hottest research direction. [102,103,104] At present, the computing power of neural networks is becoming stronger and stronger, prompting different fields and disciplines to try to use neural networks to solve some problems in this field [105,106,107,108,109]. Especially in the field of image processing [110,111], in view of its large amount of computation and a large amount of data, neural networks can easily solve some of the problems encountered. Neural networks are essentially simplified human brain neuronal systems, connecting many neurons through different connection methods to form a neural network similar to human brain nerves. This is shown in Figure 11 The neural network is an adaptive, nonlinear data processing system consisting mainly of a multitude of interconnected processing units [112,113]. It processes information obtained from the outside world in a way that is similar to the brain’s neural thinking process, and it can process data faster and more accurately than traditional artificial intelligence. Therefore, it is particularly suitable for classification, recognition, and other issues in image processing. Many scholars use neural networks to determine whether road images are diseased. The diseased images are extracted from massive amounts of data, reducing the workload for the next disease detection. At the same time as liberating manpower, it is possible to accurately and quickly select pictures containing diseases, and the accuracy rate is almost close to the level of manpower [114,115,116].
A. Riid et al. [117] used a computer vision algorithm to automatically detect road surface diseases. Based on several existing image classifier structures, a deep learning convolutional neural network model was developed. In addition, a manual preprocessing step was introduced to train the carefully selected frame sets and manually digitize them to ensure adequate detector performance. The corresponding experimental results showed that the implementation of the detector was successful. The software was easy to update, and hence it would soon be ready for deployment, further testing, and its eventual application for improving highway road pavement conditions. Chang Ying et al. [118] can detect road disease types and automatically identify road conditions through convolutional neural networks and intelligent algorithms, helping road maintenance departments carry out daily maintenance work efficiently. Based on a convolutional neural network, a multi-category road surface disease recognition method was proposed. This method can detect and recognize many kinds of road diseases, including cracks, potholes, and looseness. The performance of the proposed recognition method was evaluated through the pavement disease data set, and the recognition accuracy was confirmed to be up to 0.9438. However, this method had an obvious detection effect on large objects such as pits and ponds, while the detection accuracy of small cracks needed to be improved. D. Yuchuan et al. [21] proposed a pavement disease detection and classification method based on the YOLO network to solve the problem of pavement disease detection and classification. Target detection framework YOLO network based on deep learning was used to predict possible disease locations and disease categories. The comprehensive detection accuracy reached 73.64%. The processing speed reached 0.0347 s/PIC. The applicability of the model under various illumination conditions was also discussed. Under proper illumination conditions, the performance of the method was improved significantly. However, when the main information on the road surface was blocked by shadows, detection became more difficult. This aspect of work needs to be further improved. X. Lei et al. [119] proposed a deep learning method based on a pre-trained neural network structure for real-time identification and positioning of different diseases according to the interactive panorama of the urban road network. Eight types of diseases were recorded using Yolov3 deep learning architecture. A decision tree was designed to assess disease changes over time. Experimental results showed that the average accuracy of the proposed algorithm was 88.37%. Because street view maps provided a time-by-time view of disease conditions, they can help departments arrange repairs more efficiently and efficiently. In addition, street view images were inevitably obscured by obstacles such as trees and vehicles, which still needed to be improved. J. Gao et al. [36] proposed a deep learning method for faster R-Convnet. The optimal model was determined by training, verification, and testing with massive images. The accuracy of the faster R-Convnet was 89.13%. The stability of the model under different pavement structures was desirable. The performance of the faster R-Convnet was not obviously influenced by the pavement structures and materials. However, its performance was influenced by the transmitting frequencies of the GPR due to the detail loss of the pavement distresses in the GPR images. Tian Yang et al. [120] adopted the fast regional convolutional neural network (Fast-RCNN) method to organically combine image recognition technology, a global positioning system (GPS) position information, and vehicle-mounted signal information. Road pictures collected by road inspection vehicles were automatically identified. The Fast-RCNN model was established for training and testing based on disease characteristics, and the performance of the model was tested by an automatic partitioning algorithm. Experimental results showed that the recognition accuracy of the model could reach 84.9%. This can effectively improve the efficiency of road disease identification. The road disease model based on FastRCNN had the characteristics of high recognition accuracy, fast response speed, strong system portability, and low cost. It can be seamlessly deployed on mobile terminals and mobile phones. S. Liang et al. [121] adopted a detection method based on faster R-CNN to automatically identify and locate defects such as road cracks, potholes, oil stains, and spot surfaces. The optimal faster R-CNN was obtained through analysis and training. Finally, the stability and superiority of this method were verified by experiments and comparative studies. Compared with the CNN model, the faster R-CNN model was more efficient in identifying and locating road surface diseases. However, it was impossible to classify the types of cracks based on their cause just by using pavement images. In further works, other pavement data, such as infrared scanning and ground-penetrating radar, should be utilized to help the faster R-CNN classify the types of cracks based on their cause. Guan. J.C. et al. [122] proposed an improved u-net deep learning structure to efficiently complete the segmentation of cracks and potholes in the actual environment and reduce the amount of calculation, which introduced the detachable depth convolution for the segmentation of cracks and potholes. This method was tested on asphalt pavement in different environments. The results showed that the accuracy of the 3D road image was up to millimeter level. The automatic detection of other pavement diseases based on this framework needs further development and improvement in future research, especially the automatic detection of three-dimensional pavement diseases such as rutting and spalling. Xianyan Tang [20] proposed that the convolutional neural network intelligent algorithm can be used to train the road video images collected by inspection vehicles, which can effectively identify various types of road diseases such as cracks, pits, cracks, crushing, and repair. Pavement diseases also successfully developed intelligent identification and maintenance management information system platform, using the information of road disease in maintenance management platform. It had positive data value for analyzing the cause of road disease and making road maintenance strategies. Yu Jun et al. [123] proposed an intelligent detection system of road surface disease based on deep learning for highway safety. In the abnormal detection stage, the convolution encoder was constructed to extract the disease map from a large number of road surface images. In the stage of anomaly extraction, the feature of road surface disease was extracted by the threshold segmentation method. In the stage of highway pavement disease classification, ResNet structural training model was used to determine the classification of highway pavement disease. The results showed that the method can train the model for about 3 min and the classification accuracy was above 90%. This greatly improved the efficiency of disease detection.
3.5. Case Introduction
As urbanization accelerates and urban populations proliferate, the number of urban roads and their ancillary facilities increases, which poses challenges to municipal road management. For the custody enforcement unit, the manual-based inspection method is not only inefficient, but also the safety of the staff during the inspection process is difficult to guarantee. For industry regulatory units, the manual-based inspection method is too inspection results are difficult to guarantee. The result of the inspection is unstructured data, which is difficult to use to promote the fine management of road facilities. Therefore, Heze City, Shandong Province, China, implemented the “Urban Municipal Road Rapid Inspection System”. The system was based on artificial intelligence vision AI technology innovation and development, using artificial intelligence technology to automatically patrol municipal roads. Compared with the traditional inspection method, the work efficiency was increased by 70%, which not only saved labor but also ensured the safety of the staff. This system consisted of an onboard high-definition camera, an edge computing analysis all-in-one machine, and an artificial intelligence visual recognition platform. Roads can be inspected automatically. As long as the patrol vehicle is within 100 km per hour, it can automatically identify 12 road diseases in 3 lanes at the same time. The system currently supports the detection of 12 types of asphalt and cement pavement diseases, including transverse cracks, longitudinal cracks, strip repair, cracks, exposed bones, looseness, ruts, potholes, block repairs, subsidence, broken markings, and road area water. It can be further updated and iterated according to the actual use needs and road health characteristics of pavement disease types. The rapid inspection and identification of vehicles with problems such as sidewalk disasters, broken guardrails, damaged anti-collision barrels, and green plant lodging will be gradually realized.
3.6. Section Summary
This section described several approaches to image processing, including traditional digital image processing techniques, fitting, SVMs, and neural networks. Currently, image processing technology is characterized by high speed and high precision, which liberates human resources. However, there are still deficiencies. The current problems are mainly incomplete identification of disease types, which needs to be further developed and improved in future research. In addition, street view images are inevitably obscured by obstacles such as trees and vehicles, and the impact of these obstacles on subsequent image processing still needs to be improved.
The advantages and disadvantages of each method are summarized here, as shown in Table 2.
4. Conclusions
The study summarized the content of intelligent pavement disease detection technology. From the perspective of research significance, the development history and significance of intelligent pavement disease detection were briefly described. Several methods of acquiring road disease image data and data processing methods in the field of intelligent disease detection were introduced. There was still one shortcoming in this article. This paper lacked a summary of pavement maintenance. The maintenance of roads is becoming increasingly heavy. The limited design life, increasing traffic flow, and overload state operation test the highway maintenance work. Once the security maintenance cannot be completed in time, it will cause huge economic loss and negative social impact. Therefore, the construction of a perfect maintenance system for traffic road development has far-reaching significance.
The research on intelligent detection of road diseases has been relatively mature for the identification of cracks, but other road disease detection methods are not mature. It is necessary to ensure the practicability and universality of the research. Existing technologies should be moved from the laboratory to practical engineering applications, and they need to be able to cover as many diseases as possible. Of course, with the increase in the types of diseases studied, the requirement for the corresponding technology also increases, which needs to overcome difficulties and actively solve the problem. Moreover, most of the studies are limited to urban roads, and subsequent studies need to take rural roads into account. In addition, a data management platform needs to be established to record disease types, disease locations, and detection times to provide a complete platform for big data collection, storage, sharing, and application.
In general, the basic theoretical framework related to the intelligent detection of road diseases has been relatively perfect, and various image processing technologies have also been relatively mature. However, considering the actual engineering demand, we still need to constantly absorb new methods of theory and technology to achieve the universality and high accuracy of road disease intelligent detection.
Author Contributions
Conceptualization, X.G.; methodology, J.W.; investigation, F.H.; writing—original draft preparation, Y.Z.; writing—review and editing, X.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded part by the National Natural Science Foundation of China, grant number 52002224, part by the National Natural Science Foundation of Jiangsu Province, grant number BK20200226, part by the Program of Science and Technology of Suzhou, grant number SYG202033, part by the Key Research and Development Program of Shandong Province, grant number 2020CXG010118.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Wu, J.; Song, X. Review on smart highways critical technology. J. Shandong Univ. Eng. Sci. 2020, 50, 52–69. [Google Scholar]
- Narges, K.; Vida, M. A critical review and comparative study on image segmentation-based techniques for pavement crack detection. Constr. Build. Mater. 2022, 321, 126162. [Google Scholar]
- Shi, L.; Wang, D.; Wu, R. Common effects of temperature and load on total thickness rutting of asphalt pavement. J. Huazhong Univ. Sci. Technol. 2013, 41, 37–40. [Google Scholar]
- Leting, H.; Jinzhuang, W. Research on Laws and Computational Methods of Dynamic Surface Subsidence Deformation. J. China Univ. Min. Technol. 2008, 37, 211–215. [Google Scholar]
- Zhang, Y.; Ma, Z.; Song, X.; Wu, J.; Liu, S.; Chen, X.; Guo, X. Road Surface Defects Detection Based on IMU Sensor. Ieee Sens. J. 2022, 22, 2711–2721. [Google Scholar] [CrossRef]
- Wu, J.; Xu, H.; Zhang, Y.; Sun, R. An improved vehicle-pedestrian near-crash identification method with a roadside LiDAR sensor. J. Saf. Res. 2020, 73, 211–224. [Google Scholar] [CrossRef]
- Li, Q.; Hu, Q. A Pavement Crack Image Analysis Approach Based on Automatic Image Dodging. J. Highw. Transp. Res. Dev. 2010, 27, 27. [Google Scholar]
- Luo, H.; Jia, C.; Li, J. Road Surface Disease Detection Algorithm Based on Improved YOLOv4. Laser Optoelectron. Prog. 2021, 58, 1410025. [Google Scholar]
- Xu, H.; Chen, B.; Wang, J.; Chen, Z.; Qin, J. Elongated pavement distress detection method based on convolutional neural network. J. Comput. Appl. 2022, 42, 265–272. [Google Scholar]
- Zhang, D.-Q.; Qu, S.-R.; He, L. Application of automatic image enhancing technique to road defect detection systems. Opt. Precis. Eng. 2010, 18, 1869–1876. [Google Scholar]
- Ben Slimane, A.; Khoudeir, M.; Brochard, J.; Do, M.-T. Characterization of road microtexture by means of image analysis. Wear 2008, 264, 464–468. [Google Scholar] [CrossRef] [Green Version]
- El Gendy, A.; Shalaby, A. Mean profile depth of pavement surface macrotexture using photometric stereo techniques. J. Transp. Eng. 2007, 133, 433–440. [Google Scholar] [CrossRef]
- Nejad, F.M.; Karimi, N.; Zakeri, H. Automatic image acquisition with knowledge-based approach for multi-directional determination of skid resistance of pavements. Autom. Constr. 2016, 71, 414–429. [Google Scholar] [CrossRef]
- Puzzo, L.; Loprencipe, G.; Tozzo, C.; D’Andrea, A. Three-dimensional survey method of pavement texture using photographic equipment. Measurement 2017, 111, 146–157. [Google Scholar] [CrossRef]
- Vilaca, J.L.; Fonseca, J.C.; Pinho, A.C.M.; Freitas, E. 3D surface profile equipment for the characterization of the pavement texture-TexScan. Mechatronics 2010, 20, 674–685. [Google Scholar] [CrossRef] [Green Version]
- Chun, P.-J.; Yamane, T.; Tsuzuki, Y. Automatic Detection of Cracks in Asphalt Pavement Using Deep Learning to Overcome Weaknesses in Images and GIS Visualization. Appl. Sci. 2021, 11, 892. [Google Scholar] [CrossRef]
- Luo, W.; Liu, L.; Li, L. Measuring rutting dimension and lateral position using 3D line scanning laser and inertial measuring unit. Autom. Constr. 2020, 111, 103056. [Google Scholar] [CrossRef]
- Zhong, M.; Sui, L.; Wang, Z.; Hu, D. Pavement Crack Detection from Mobile Laser Scanning Point Clouds Using a Time Grid. Sensors 2020, 20, 4198. [Google Scholar] [CrossRef]
- Du, Y.; Weng, Z.; Liu, C.; Wu, D. Dynamic Pavement Distress Image Stitching Based on Fine-Grained Feature Matching. J. Adv. Transp. 2020, 2020, 5804835. [Google Scholar] [CrossRef] [Green Version]
- Tang, X.Y. Application of Intelligent Identification and Maintenance Management System for Pavement Diseases. Traffic Transp. 2021, 37, 39–43. [Google Scholar]
- Yuchuan, D.; Ning, P.; Zihao, X.; Fuwen, D.; Yu, S.; Hua, K. Pavement distress detection and classification based on YOLO network. Int. J. Pavement Eng. 2020, 22, 1659–1672. [Google Scholar]
- Grabowski, D.; Szczodrak, M.; Czyzewski, A. Economical methods for measuring road surface roughness. Metrol. Meas. Syst. 2018, 25, 533–549. [Google Scholar]
- Jahanshahi, M.R.; Jazizadeh, F.; Masri, S.F.; Becerik-Gerber, B. Unsupervised Approach for Autonomous Pavement-Defect Detection and Quantification Using an Inexpensive Depth Sensor. J. Comput. Civ. Eng. 2013, 27, 743–754. [Google Scholar] [CrossRef]
- Cui, X.; Zhou, X.; Lou, J.; Zhang, J.; Ran, M. Measurement method of asphalt pavement mean texture depth based on multi-line laser and binocular vision. Int. J. Pavement Eng. 2017, 18, 459–471. [Google Scholar] [CrossRef]
- Duan, H.; Shen, Y.; Wang, Y.; Luo, D.; Niu, Y. Review of technological hot spots of unmanned aerial vehicle in 2018. Sci. Technol. Rev. 2019, 37, 82–90. [Google Scholar]
- Li, D.; Li, M. Research Advance and Application Prospect of Unmanned Aerial Vehicle Remote Sensing System. Geomat. Inf. Sci. Wuhan Univ. 2014, 39, 505–513. [Google Scholar]
- Liao, X.; Zhou, C.; Su, F.; Lu, H.; Yue, H.; Gou, J. The Mass Innovation Era of UAV Remote Sensing. J. Geo-Inf. Sci. 2016, 18, 1439–1447. [Google Scholar]
- Junqing, Z.; Jingtao, Z.; Tao, M.; Xiaoming, H.; Weiguang, Z.; Yang, Z. Pavement distress detection using convolutional neural networks with images captured via UAV. Autom. Constr. 2022, 133, 103991. [Google Scholar]
- Mao, Z.; Zhao, C.; Zheng, Y.; Mao, Y.; Li, H.; Hua, L.; Liu, Y. Research on detection method of pavement diseases based on Unmanned Aerial Vehicle (UAV). In Proceedings of the International Conference on Image, Video Processing and Artificial Intelligence, Shanghai, China, 21–23 August 2020. [Google Scholar]
- Inzerillo, L.; Mino, G.D.; Roberts, R. Image-based 3D reconstruction using traditional and UAV datasets for analysis of road pavement distress. Autom. Constr. 2018, 96, 457–469. [Google Scholar] [CrossRef]
- Heng, Q.; Zhihua, Z.; Xinxiu, Z.; Jingping, Y. Research on Image Feature Extraction of Pavement Crack Disease. J. Phys. Conf. Ser. 2021, 1883, 12100. [Google Scholar]
- Wentong, G. Intelligent detection device of pavement disease based on image recognition technology. J. Phys. Conf. Ser. 2021, 1884, 12032. [Google Scholar]
- Loulizi, A.; Al-Qadi, I.L.; Lahouar, S. Optimization of ground-penetrating radar data to predict layer thicknesses in flexible pavements. J. Transp. Eng. 2003, 129, 93–99. [Google Scholar] [CrossRef]
- Shangguan, P.; Al-Qadi, I.L. Calibration of FDTD Simulation of GPR Signal for Asphalt Pavement Compaction Monitoring. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1538–1548. [Google Scholar] [CrossRef]
- Zhu, Z.; Feng, B. Research on Road Disease Detection Based on Ground Penetrating Radar Technology. Eng. Tech. Res. 2018, 2018, 186–187. [Google Scholar]
- Gao, J.; Yuan, D.; Tong, Z.; Yang, J.; Yu, D. Autonomous pavement distress detection using ground penetrating radar and region-based deep learning. Measurement 2020, 164, 108077. [Google Scholar] [CrossRef]
- Lahouar, S.; Al-Qadi, I.L. Automatic detection of multiple pavement layers from GPR data. NDT E Int. 2008, 41, 69–81. [Google Scholar] [CrossRef]
- Zhang, A.J.; Cheng, R.; Sun, T.; Xie, W.W.; Li, F.; Tao, Y.H.; Huang, T. Application Analysis of Asphalt Pavement Ground Penetrating Radar Rapid Detection Technology. J. Jiangsu Vocat. Coll. Archit. 2021, 21, 6–10. [Google Scholar]
- Huang, Q.; Yan, G.H. Defect Identification Test of Road Ground Penetrating Radar Detection Signal. Highw. Transp. Technol. 2011, 28, 40–43. [Google Scholar]
- Dipesh, D.; Fawzi, L.; Abdul, R.M.; Ashutosh, B. Detection of subsurface defects in concrete slabs using ground penetrating radar. In Proceedings of the Nondestructive Characterization and Monitoring of Advanced Materials, Aerospace, Civil Infrastructure, and Transportation XV. International Society for Optics and Photonics, Online, 22–27 March 2021. [Google Scholar]
- Ali, H.; Zaidi, A.F.A.; Ahmad, W.K.W.; Azalan, Z.A.Z.; Amran, T.S.T.; Ahmad, M.R.; Elshaikh, M. A cascade hyperbolic recognition of buried objects using hybrid feature extraction in ground penetrating radar images. J. Phys. Conf. Ser. 2021, 1997, 012018. [Google Scholar] [CrossRef]
- Juncai, X.; Jingkui, Z.; Weigang, S. Recognition of the Typical Distress in Concrete Pavement Based on GPR and 1D-CNN. Remote Sens. 2021, 13, 2375. [Google Scholar]
- Rim, G.; Samer, L.; Chokri, S. FDTD-based sensitivity analysis of GPR acquisition parameters for accurate detection of buried cylindrical objects. Electron. Lett. 2021, 58, 118–120. [Google Scholar]
- Mahmud, N.S.; Shukor, S.A.A.; Ali, H.; Zaidi, A.F.A.; Azalan, M.S.Z.; Amran, T.S.T.; Ahmad, M.R. Underground object reconstruction from Ground Penetrating Radar (GPR) data–An investigative study of feature extraction. J. Phys. Conf. Ser. 2021, 2107, 12062. [Google Scholar] [CrossRef]
- Zeev, Z.; Gerald, S.B.; Tao, C.; Moshik, C.; Rory, B. Light detection and ranging (lidar): Introduction. J. Opt. Soc. Am. A Opt. Image Sci. Vis. 2021, 38, LID1–LID2. [Google Scholar]
- Zlocki, A.; Klas, C.; Schulte, K.; Kradepohl, U. Definition and Application of a Test Methodology for Lidar Sensors. ATZelectronics Worldw. 2021, 16, 46–49. [Google Scholar] [CrossRef]
- Wang, S.Y.; Zhang, J.X.; Zhang, C.; Zhao, E.Q. Experimental Analysis of Measurement Stability of Laser Road Condition Detection Equipment. Highw. Transp. Technol. 2008, 4, 330–334. [Google Scholar]
- Zhao, J.W. Street-Level Road Change Detection Using On-Board LiDAR Scanning. Mapp. Spat. Geogr. Inf. 2021, 44, 17–20. [Google Scholar]
- Bellone, M.; Reina, G. Pavement distress detection and avoidance for intelligent vehicles. Int. J. Veh. Auton. Syst. 2016, 13, 152–167. [Google Scholar] [CrossRef]
- Li, W.; Ju, H.; Tighe, S.L. Pavement Cracking Detection Based on Three-Dimensional Data Using Improved Active Contour Model. J. Transp. Eng. Part B-Pavements 2018, 144, 04018006. [Google Scholar] [CrossRef]
- Yan, D.L.; Gao, S.; Li, S.H.; Huo, M. Detection of Road Unevenness and Drivable Area Based on LiDAR. Laser Technol. 2021, 2021, 1–9. [Google Scholar]
- Jiang, C.; Tsai, Y.J. Enhanced Crack Segmentation Algorithm Using 3D Pavement Data. J. Comput. Civ. Eng. 2016, 30, 04015050. [Google Scholar] [CrossRef]
- Song, S. Application of 3D Line Laser Technology in Road Rutting Inspection Work. Equip. Manag. Maint. 2020, 2020, 140–142. [Google Scholar]
- Guo, X.X.; Hui, B. Error Analysis of Multi-Point Laser Rutting Detection Based On 3D Line Laser Technology. Road Constr. Mach. Constr. Mech. 2016, 33, 113–118. [Google Scholar]
- Hu, S.R.; Zhou, B.W.; Hui, B. Analysis of Offset Error of Non-Uniform 13-Point Laser Road Rutting Detection. Highw. Eng. 2020, 45, 85–91. [Google Scholar]
- Wang, J.F.; Ma, J.; Ma, R.G.; Song, H.X. Research on Three-Dimensional Detection Technology of Pavement. J. Wuhan Univ. Technol. 2010, 34, 1202–1205. [Google Scholar]
- Coenen, T.B.J.; Golroo, A. A review on automated pavement distress detection methods. Cogent Eng. 2017, 4, 1374822. [Google Scholar] [CrossRef]
- Tsai, Y.-C.J.; Li, F. Critical Assessment of Detecting Asphalt Pavement Cracks under Different Lighting and Low Intensity Contrast Conditions Using Emerging 3D Laser Technology. J. Transp. Eng. 2012, 138, 649–656. [Google Scholar] [CrossRef]
- Zhang, D.; Xu, X.; Lin, H.; Gui, R.; Cao, M.; He, L. Automatic road-marking detection and measurement from laser-scanning 3D profile data. Autom. Constr. 2019, 108, 102957. [Google Scholar] [CrossRef]
- Azza, A.; Anis, K.; Tarek, A.; Adel, A. RoadSense: Smartphone Application to Estimate Road Conditions Using Accelerometer and Gyroscope. IEEE Sens. J. 2017, 17, 4231–4238. [Google Scholar]
- Du, R.; Qiu, G.; Gao, K.; Hu, L.; Liu, L. Abnormal Road Surface Recognition Based on Smartphone Acceleration Sensor. Sensors 2020, 20, 451. [Google Scholar] [CrossRef] [Green Version]
- Harikrishnan, P.M.; Gopi, V.P. Vehicle Vibration Signal Processing for Road Surface Monitoring. IEEE Sens. J. 2017, 17, 5192–5197. [Google Scholar] [CrossRef]
- Gianmarco, B.; Raimondo, G.; Filip, G. On the Application of Time Frequency Convolutional Neural Networks to Road Anomalies’ Identification with Accelerometers and Gyroscopes. Sensors 2020, 20, 6425. [Google Scholar]
- Gianmarco, B.; Raimondo, G.; Franc, D. Road Safety Features Identification Using the Inertial Measurement Unit. IEEE Sens. Lett. 2018, 2, 1–4. [Google Scholar]
- Sattar, S.; Li, S.; Chapman, M. Road Surface Monitoring Using Smartphone Sensors: A Review. Sensors 2018, 18, 3845. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Strutu, M.; Stamatescu, G.; Popescu, D. A Mobile Sensor Network Based Road Surface Monitoring System. In Proceedings of the 17th International Conference System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 11–13 October 2013; pp. 630–634. [Google Scholar]
- Anthony, O.C.; Angus, H.M.; Sara, C.; Yichuang, S.; Johann, S. Improving Displacement Measurement for Evaluating Longitudinal Road Profiles. IEEE Sens. J. 2018, 18, 3767–3779. [Google Scholar]
- Kyriakou, C.; Christodoulou, S.E.; Dimitriou, L. Smartphone-Based Pothole Detection Utilizing Artificial Neural Networks. J. Infrastruct. Syst. 2019, 25, 04019019. [Google Scholar] [CrossRef]
- Kong, X.; Yang, W.; Luo, H.E.; Li, B. Application of Stabilized Numerical Integration Method in Acceleration Sensor Data Processing. IEEE Sens. J. 2021, 21, 8194–8203. [Google Scholar] [CrossRef]
- Ankit, G.; Aseem, U.I.S.; Ahmad, A.; Omran, K.; Dennis, S.B. An Introduction to Inertial Navigation from the Perspective of State Estimation. IEEE Control. Syst. Mag. 2021, 41, 104–128. [Google Scholar]
- Liu, J. Analysis of Inertial Navigation Technology. Int. J. Educ. Technol. 2021, 2021, 2. [Google Scholar]
- Stanislav, H.; Jana, I.; Donatas, R. Trends in Inertial Navigation Technologies. In Proceedings of the 7th World Multidisciplinary Earth Sciences Symposium (WMESS 2021), Prague, Czech Republic, 6–10 September 2021; Volume 906. [Google Scholar]
- Zhang, Y.; Yuan, G. Overview of Application Research on Inertial Navigation Unit. Int. Core J. Eng. 2021, 7, 20–28. [Google Scholar]
- Chenyong, L.; Xin, S. Retraction Note: Bioinformatics analysis of mountain plant characteristics and ginsenoside glycosyltransferase based on image recognition. Arab. J. Geosci. 2021, 14, 1800. [Google Scholar]
- Qian, L. Retraction Note: Air pollution detection based on image recognition and evaluation of measles prevention and immunity effect. Arab. J. Geosci. 2021, 14, 1691. [Google Scholar]
- Xia, Y.; Chen, J.; Li, J.; Zhang, Y. Geometric discriminative features for aerial image retrieval in social media. Multimed. Syst. 2016, 22, 497–507. [Google Scholar] [CrossRef]
- Fan, Y.; Xu, K.; Wu, H.; Zheng, Y.; Tao, B. Spatiotemporal Modeling for Nonlinear Distributed Thermal Processes Based on KL Decomposition, MLP and LSTM Network. IEEE Access 2020, 8, 25111–25121. [Google Scholar] [CrossRef]
- Jia, T. Retraction Note to: Urban groundwater pollution and green city economic efficiency based on image recognition. Arabian J. Geosci. 2021, 14, 1567. [Google Scholar]
- Wenhua, H.; Juan, R.; Tao, Y.; Yan, H. Retraction Note: Research on urban modern architectural art based on artificial intelligence and GIS image recognition system. Arab. J. Geosci. 2021, 14, 895. [Google Scholar]
- Wenhua, H.; Jinglong, J. Retraction Note to: Research on coastline climate characteristics and urban media art based on GIS image recognition. Arab. J. Geosci. 2021, 14, 1382. [Google Scholar]
- MinSheng, H.; YiTzu, C. Application of image recognition for plant virus detection. Microsc. Microanal. 2021, 2021, 27. [Google Scholar]
- Lulin, Z. Research on control strategy of multi-source data fusion solar intelligent vehicle based on image recognition. Int. J. Low-Carbon Technol. 2021, 16, 1363–1370. [Google Scholar]
- Yuzhong, K.; Aimin, Y.; Wenquan, Z. Construction of Concrete Surface Crack Recognition Model Based on Digital Image Processing Technology. J. Phys. Conf. Ser. 2021, 2074, 12067. [Google Scholar]
- Wang, Z.Y. Automatic Identification and Evaluation System of Pavement Cracks Based on Digital Image Processing. Software 2014, 35, 149–151. [Google Scholar]
- Xiao, Z.J.; Han, Z.H.; Xu, Y.M. Research on Key Technologies for Pavement Crack Recognition Based on Digital Image Processing. J. Jilin Norm. Univ. 2022, 43, 116–120. [Google Scholar]
- Xu, W.C.; Zhang, L.; Zhang, C.; Zhang, T.Y.; Li, M.S. Research on Image-Based Road Disease Detection Method. Highw. Transp. Technol. 2018, 14, 157–161. [Google Scholar]
- Cao, X.; Li, T.; Bai, J.; Wei, Z. Identification and Classification of Surface Cracks on Concrete Members Based on Image Processing. Traitement Du Signal 2020, 37, 519–525. [Google Scholar] [CrossRef]
- Qiao, W.; Wu, X.; Sun, W.; Wu, Q. Research on Concrete Beam Crack Recognition Algorithm Based on Block Threshold Value Image Processing. Struct. Durab. Health Monit. 2020, 14, 355. [Google Scholar] [CrossRef]
- Tian, F.; Zhao, Y.; Che, X.; Zhao, Y.; Xin, D. Concrete Crack Identification and Image Mosaic Based on Image Processing. Appl. Sci. 2019, 9, 4826. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Maria, R.; Bijan, S.; Yousefi, A.M.; Weiqiang, W. Multi-Image-Feature-Based Hierarchical Concrete Crack Identification Framework Using Optimized SVM Multi-Classifiers and D–S Fusion Algorithm for Bridge Structures. Remote Sens. 2021, 13, 240. [Google Scholar]
- Alireza, K.; Alireza, K. Damage assessment of RC arch structures using fractal analysis of crack patterns. In Proceedings of the Nondestructive Characterization and Monitoring of Advanced Materials, Aerospace, Civil Infrastructure, and Transportation XV, Online, 22–27 March 2021; p. 11592. [Google Scholar]
- Qingyu, D.; Zeyi, S.; Congjie, O. Self-Adaptive Image Thresholding within Nonextensive Entropy and the Variance of the Gray-Level Distribution. Entropy 2022, 24, 319. [Google Scholar]
- Michael, L.; Li, L.D. A Novel Method of Curve Fitting Based on Optimized Extreme Learning Machine. Appl. Artif. Intell. 2020, 34, 849–865. [Google Scholar]
- Du, Y.; Hong, B.; Guo, L.; Yang, N. Novel curve fitting edge feature extraction algorithm. J. Xidian Univ. 2011, 38, 164–168. [Google Scholar]
- Wang, D.H.; Guan, Q. An Algorithm for Automatic Identification of Pavement Depressions Using the Fitted Datum Method. J. Northeast. For. Univ. 2009, 37, 106–108. [Google Scholar]
- Gao, J.Z.; Lu, J.F.; Zhao, C.X.; Tang, Z.M.; Yang, J.N. Automatic Detection and Identification of Road Diseases Based on Multi-Level Fitting. Comput. Eng. Appl. 2004, 45, 220–223. [Google Scholar]
- Tanveer, M.; Rajani, T.; Rastogi, R.; Shao, H.Y.; Ganaie, A.M. Comprehensive review on twin support vector machines. Ann. Oper. Res. 2022, 2022, 1–46. [Google Scholar] [CrossRef]
- Karballaeezadeh, N.; Mohammadzadeh, D.S.; Shamshirband, S.; Hajikhodaverdikhan, P.; Mosavi, A.; Chau, K.-W. Prediction of remaining service life of pavement using an optimized support vector machine (case study of Semnan-Firuzkuh road). Eng. Appl. Comput. Fluid Mech. 2019, 13, 188–198. [Google Scholar] [CrossRef] [Green Version]
- Jie, X.H.; Chuan, H.Z. Adaptive loss function based least squares one-class support vector machine. Pattern Recognit. Lett. 2022, 156, 174–182. [Google Scholar]
- Leong, W.C.; Kelani, R.O.; Ahmad, Z. Prediction of Air Pollution Index (Api) Using Support Vector Machine (Svm). J. Environ. Chem. Eng. 2020, 8, 103208. [Google Scholar] [CrossRef]
- Wang, Y.F. Research on Shallow Disease Detection of Highway Based on Support Vector Machine and Ground Penetrating Radar Technology. Master’s Thesis, North China University of Water Resources and Electric Power, Henan, China, 2019. [Google Scholar]
- Afan, H.A.; Osman, A.I.A.; Essam, Y.; Ahmed, A.N.; Huang, Y.F.; Kisi, O.; Sherif, M.; Sefelnasr, A.; Chau, K.-W.; El-Shafie, A. Modeling the fluctuations of groundwater level by employing ensemble deep learning techniques. Eng. Appl. Comput. Fluid Mech. 2021, 15, 1420–1439. [Google Scholar] [CrossRef]
- Banan, A.; Nasiri, A.; Taheri-Garavand, A. Deep learning-based appearance features extraction for automated carp species identification. Aquac. Eng. 2020, 89, 102053. [Google Scholar] [CrossRef]
- Salem, H.; Kabeel, A.E.; El-Said, E.M.S.; Elzeki, O.M. Predictive modelling for solar power-driven hybrid desalination system using artificial neural network regression with Adam optimization. Desalination 2022, 522, 115411. [Google Scholar] [CrossRef]
- Ashok, K.L.; Karthika, R.D.; Lovelyn, R.S.; Shunmuga Priya, M.C.; Made, W.I. Deep Learning based Assistive Technology on Audio Visual Speech Recognition for Hearing Impaired. Int. J. Cogn. Comput. Eng. 2022, 3, 24–30. [Google Scholar]
- Baskerville, N.P.; Granziol, D.; Keating, G.P. Appearance of Random Matrix Theory in deep learning. Phys. A Stat. Mech. Appl. 2022, 590, 126742. [Google Scholar] [CrossRef]
- Piyush, A.; Mohammad, A.; Melih, T.; Hector, B. A novel unsupervised approach for batch process monitoring using deep learning. Comput. Chem. Eng. 2022, 159, 107694. [Google Scholar]
- Wenyu, W.; Wenzhong, Y.; Enguang, Z.; Yunyun, Q.; Lihua, W. Person re-identification based on deep learning—An overview. J. Vis. Commun. Image Represent. 2021, 82, 103418. [Google Scholar]
- Yen, C.M.; David, L.E.; Erol, E. Deep learning and intelligent system towards smart manufacturing. Enterp. Inf. Syst. 2022, 16, 189–192. [Google Scholar]
- Hou, Z.; Shi, Y.; Wang, J.; Cui, Y.; Yin, B. MS-Net: A lightweight separable ConvNet for multi-dimensional image processing. Multimed. Tools Appl. 2021, 80, 25673–25688. [Google Scholar] [CrossRef]
- Wei, W.; Lieyun, D.; Hanbin, L.; Chen, L.; Guowei, L. Automated bughole detection and quality performance assessment of concrete using image processing and deep convolutional neural networks. Constr. Build. Mater. 2021, 281, 122576. [Google Scholar] [CrossRef]
- Serkan, K.; Onur, A.; Osama, A.; Turker, I.; Moncef, G.; Daniel, J.I. 1D convolutional neural networks and applications: A survey. Mech. Syst. Signal Processing 2021, 151, 107398. [Google Scholar]
- Yong-Liang, X.; Sikun, L.; Guohai, S.; Zhisheng, Y. Unitary learning for diffractive deep neural network. Opt. Lasers Eng. 2021, 139, 106499. [Google Scholar]
- Safavizadeh, S.A.; Wargo, A.; Richard, K.Y. Utilizing Digital Image Correlation (DIC) in Asphalt Pavement Testing. J. Test. Eval. 2018, 46, 984–998. [Google Scholar] [CrossRef]
- Balakrishnan, R.; Aamir, H.A.; Rajesh, E.M.; Braulio, F.G.; Lim, Y.; Thejus, P.; Mohan, R.M.; Selvasundari, S. Deep Learning Based Pavement Inspection Using Self-Reconfigurable Robot. Sensors 2021, 21, 2995. [Google Scholar]
- Zhenyu, D.; Jie, Y.; Feipeng, X.; Chamod, H. Application of image technology on pavement distress detection: A review. Measurement 2021, 184, 109900. [Google Scholar]
- Riid, A.; Lõuk, R.; Pihlak, R.; Tepljakov, A.; Vassiljeva, K. Pavement Distress Detection with Deep Learning Using the Orthoframes Acquired by a Mobile Mapping System. Appl. Sci. 2019, 9, 4829. [Google Scholar] [CrossRef] [Green Version]
- Chang, Y.; Cai, R.B. Research on Multi-Category Pavement Disease Identification Based on Convolutional Neural Network. Shanghai Electr. Technol. 2020, 13, 61–66. [Google Scholar]
- Lei, X.; Liu, C.; Li, L.; Wang, G. Automated Pavement Distress Detection and Deterioration Analysis Using Street View Map. IEEE Access 2020, 8, 76163–76172. [Google Scholar] [CrossRef]
- Tian, Y.; Qiu, L. A Road Disease Detection Algorithm Based on Fast-RCNN. Munic. Technol. 2020, 38, 123–127. [Google Scholar]
- Liang, S.; Xuancang, W. Faster region convolutional neural network for automated pavement distress detection. Road Mater. Pavement Des. 2021, 22, 23–41. [Google Scholar]
- Guan, J.; Yang, X.; Ding, L.; Cheng, X.; Lee, V.C.S.; Jine, C. Automated pixel-level pavement distress detection based on stereo vision and deep learning. Autom. Constr. 2021, 129, 103788. [Google Scholar] [CrossRef]
- Yu, J.; Wu, H.J.; Wang, W.B.; Zhang, Z.T. Intelligent Detection System of Highway Pavement Disease Based on Deep Learning. Highw. Eng. 2020, 4, 1–9. [Google Scholar]
Figure 1.
(a) The diagram of crack; (b) The diagram of rut; (c) The diagram of groove; (d) The diagram of subsidence.
Figure 1.
(a) The diagram of crack; (b) The diagram of rut; (c) The diagram of groove; (d) The diagram of subsidence.

Figure 2.
Data collection equipment for road disease.

Figure 3.
Aerial model of a drone.

Figure 4.
GPR detection process.

Figure 5.
Image of flaw reflection echo on GPR.

Figure 6.
Point cloud data collected by LiDAR.

Figure 7.
IMU fixed to the inspection vehicle.

Figure 8.
Digital image processing method.

Figure 9.
The process of fitting.

Figure 10.
(a) One-to-many classification algorithm; (b) One-to-one classification algorithm.

Figure 11.
Neural network structure model.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Overview of data acquisition devices.
| Device | Advantage | Disadvantage |
|---|---|---|
| Camera | 1. It has high dynamic range and resolution. 2. The price is inexpensive. | 1. It affects by the lighting conditions. 2. It lacks depth information. |
| GPR | 1. Its anti-interference ability is strong and anti-electromagnetic interference ability is strong. 2. It less affected by the bad environment. 3. It has better inspection depth and resolution. | 1. The big data obtained by the ground penetrating radar delay the processing time, which leads to problems such as subjectivity in data interpretation. 2. The detection depth needs to be improved. |
| LiDAR | 1. The detection distance is long and the angle measurement accuracy is high. 2. The resolution is high and the viewing angle is wide. | 1. It is susceptible to natural light and thermal radiation. 2. The working environment requirements are high. 3. The price is expensive. |
| IMU | 1. It is not affected by external electromagnetic interference. 2. It can work all times. 3. It has a high data update rate, short-term accuracy and stability. | 1. The positioning error increases with time. 2. It requires a long initial alignment time before each use. 3. The price is expensive. |
Table 2.
Overview of data processing.
| Device | Advantage | Disadvantage |
|---|---|---|
| Digital image processing | 1. It has high accuracy and is easy to operate. 2. Image quality will not be degraded because of image storage, forwarding, copy and other operations. | 1. The processing speed is relatively slow |
| Fitting | 1. It models quickly. 2. It works well for simple relationships. | 1. It is difficult to model nonlinear data. |
| SVM | 1. It does not need to rely on the entire data set. 2. It can solve higher dimensional problems. | 1. It is not very efficient when you have a lot of samples. |
| Neural network | 1. It has high accuracy of classification. 2. It has associative memory function. | 1. It needs a lot of parameters. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Zhou, Y.; Guo, X.; Hou, F.; Wu, J. Review of Intelligent Road Defects Detection Technology. Sustainability 2022, 14, 6306. https://0-doi-org.brum.beds.ac.uk/10.3390/su14106306
AMA Style
Zhou Y, Guo X, Hou F, Wu J. Review of Intelligent Road Defects Detection Technology. Sustainability. 2022; 14(10):6306. https://0-doi-org.brum.beds.ac.uk/10.3390/su14106306
Chicago/Turabian StyleZhou, Yong, Xinming Guo, Fujin Hou, and Jianqing Wu. 2022. "Review of Intelligent Road Defects Detection Technology" Sustainability 14, no. 10: 6306. https://0-doi-org.brum.beds.ac.uk/10.3390/su14106306
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.