1. Introduction
The global road safety report estimates that the annual number of deaths in traffic accidents has reached 1.35 million [
1]. Globally, European roads have been declared the safest, with a 19% decrease in road fatalities over the past six years. Although the strategic goal for sustainable development of halving the number of deaths in traffic accidents between 2010 and 2020 has been achieved, it is worth intending to protect every single life [
2]. The performance of Hungary in road safety is below the European Union (EU) average. On Hungarian roads, 64 people per million inhabitants died in 2018, indicating a 1% rise compared to the previous year [
3]. When the situation analysis of the Road Safety Action Program is examined, it seems that most of the traffic accidents were caused by human-related issues; so minimizing human-related issues becomes an extremely dynamic goal to make the roads safe [
4].
Human behavior plays a very significant role in the sustainable transport system, with previous research findings showing human factors to be a primary cause in almost 90% of the traffic crashes on the roads [
5,
6,
7]. Also, a study observed that driving behavior is one of the basic driver-related components that directly affect road safety [
8]. Several driver behavior factors have been detected as dynamic, intentional rule violations and errors due to less driving experience, while others were due to inattention, momentary faults or failure to perform a function—the latter generally connected to age [
9,
10]. Driving behavior evaluation has been considered a crucial constraint for traffic studies. The studies provide valuable data on generally three main topics that can be classified as road safety analysis, microscopic traffic simulation, and intelligent transportation systems [
11]. A resolution by the Council of Ministers approved on 24 September 2019 on the “Strategy for the Sustainable Transport Development by 2030” emphasized on the need to increase transport accessibility in the country, and enhance the safety of traffic users and competence of the transport sector by creating a sustainable, innovative, coherent, and user-friendly transport network at the national, European, and global levels [
12]. A sustainable transportation system can provide access to people, opportunities, and goods and services in an efficient, safe, and equitable way without affecting the environment. Sustainable transportation can serve all groups of people in the city in a way that is within its environmental carrying capability and is rational to both users and providers of the system [
13].
MCDM is an innovative area of operational study in quantitative hazard assessment classification. MCDM presents a wide assortment of approaches to decision makers (DMs) and experts who are well complemented with the intricacy of decision-making issues. MCDM approaches primarily contain human intervention and decisions [
14]. MCDM approaches involve estimating and deciding alternatives under conflicting criteria while considering the choices provided by DMs [
15]. The major elements of an MCDM approach involve alternatives, criteria against assessed alternatives, alternatives scores on criteria, and criteria weights signifying the relative significance of each criterion in comparison with others [
15].
In risk-assessment literature, researchers utilize valuable MCDM methodologies such as AHP to rank deterrents or development actions of risky systems [
16,
17]. AHP, developed by Saaty (1990) [
18], is based on the hierarchic MCDM issue involving an objective, criteria, and alternatives. The AHP has the benefits of hierarchical arrangement definition, presentation of the issue in a structural way, and incorporation of all the decisions with structured links. After the design of the hierarchy, linguistic expressions are utilized by evaluators to do pairwise comparisons (PCs). These linguistic expressions are transformed into numerical values by implementing fuzzy sets that are capable of focusing on the vagueness and uncertainty of the assessment processes [
18]. At present, numerous studies combine AHP approaches with the system of fuzzy logic, which provides risk prioritization according to threat level and yields a consistent model for risk assessment. The use of such risk assessment models can be found in several fields, such as the risk assessment of floor water incursion in coal mines [
19], driver behavior criteria [
20], and information technology developments [
21]. Previous studies utilized fuzzy AHP to estimate and give priority to the most important driver behavior criteria related to road safety for Budapest drivers [
22] and those from different cultures [
23]. Furthermore, the triangular fuzzy method was integrated with the best–worst method (F-BWM) to better estimate the nominated driver behavior criteria for the development of a consistent decision process related to road safety issues [
24]. However, there is a demand for a better and more flexible description of membership tasks in fuzzy MCDM approaches. In this study, the adopted model targets to examine and rank the most crucial driver behavior factors and sub-factors affecting road safety based on evaluators’ responses in order to alleviate the uncertainty of non-expert assessments.
The PFS, an expansion of intuitionistic fuzzy sets, was created with the objective of generating a larger domain area for evaluators in stating their decisions regarding the impreciseness and vagueness of the studied complex problem. It attains this objective because the evaluators do not have to designate membership and non-membership grades whose total is at ultimate 1. Though the total squares of such degrees should be at ultimate 1, the weight scores achieved through the PF-AHP method will be utilized as inputs for prospectively factor in risk assessment methods [
25]. The extensions aim to cope with the uncertainty and decide the indeterminacy more consistently. PFSs enable the statement on a larger frame of membership and non-standard membership grades that allow experts to consider uncertainty more efficiently than others of fuzzy extensions [
26].
The main aim of the work is to estimate and rank the ultimate essential factors affecting road safety by utilizing the PF-AHP method and its application. The questionnaire created on the fuzzy scale is utilized to assess the responses of different drivers’ groups using PCs. The work prioritizes specified factors developed in three levels of hierarchical structure by giving weight to each factor. Finally, high-rank driver behavior factors that can drastically affect road safety are highlighted.
4. Results and Discussion
The PF-AHP method can be recommended for all decision support systems in which layman evaluators measure the fundamentals of the decision system, mostly in methods where pairwise comparisons are adopted. In addition, the proposed model allows experts to better understand the whole assessment procedure. This consequence has been proved by our survey data. The proposed integrated process could help decision-makers focus on high-ranked critical factors affecting road safety to fulfill the criteria for sustainable transport system. Through the applied algorithm for each comparison matrix, the outcomes of the application are calculated (
Table 10).
For a broader analysis, for driver Group 1 the application outcomes indicated the criterion ‘errors’ (C3) as the ultimate critical factor connected to road safety for the first level of structure. In the same way, the criterion ‘lapses’ (C2) was determined as the least effective factor based on the outcomes. Instead of Group 1, the criterion ‘lapses’ (C2) obtained the first rank as the ultimate effective criterion. Through the evaluation of all groups, the criterion ’lapses’ (C2) was determined as the ultimate effective Level-1 criterion. For Level 2, application outcomes depicted ‘failure to apply brakes in road hazards’ (C33) as the ultimate crucial factor, followed by ‘ordinary violations’ (C11), while ‘pull away from traffic lights in the wrong gear’ (C22) was noticed as the least critical factor in comparison with others. For Level 3, application outcomes showed ‘fail to maintain a safe gap’ (C112) as the ultimate critical factor followed by ‘fail to use personal intelligence’ (C111) while application outcomes found ‘disobey overtaking rules’ (C121) as the least critical criteria based on measured weight scores.
For driver Group 2, application outcomes depicted ‘lapses’ (C2) and ‘errors’ (C3) as the ultimate critical factor connected to road safety for the first level of hierarchical structure while ‘violations’ (C1) was observed as the least critical factor based on measured weight scores. For Level 2, application outcomes showed ‘fail to apply brakes in road hazards’ (C33) as the ultimate critical factor, followed by ‘hit something that had not been seen when reversing’ (C23), while ‘ordinary violations’ (C11) were observed as the least critical factor as compared to others. For Level 3, application outcomes showed ‘drive with alcohol use’ (C126) as the ultimate critical factor, followed by ‘disobey traffic lights’ (C123), and ‘fail to use personal intelligence’ (C111) as the least critical criteria based on measured weight scores.
For driver Group 3, outcomes depicted ‘lapses’ (C2) as the ultimate critical factor connected to road safety for the first level of hierarchical structure while ‘violations’ (C1) and ‘errors’ (C3) were observed as the least critical factors based on measured weight scores. For Level 2, ‘driver inattention’ (C21) was found to be the ultimate critical factor, followed by ‘hit something that had not been seen when reversing’ (C23), while ‘visual perception failure’ (C31) was observed as the least essential fact as compared to other specified factors. For Level 3, application outcomes showed ‘drive with alcohol use’ (C126) as the ultimate critical factor, followed by ‘disobey traffic lights’ (C123), while application outcomes found ‘disobey overtaking rules’ (C121) as the least critical criteria based on measured weight scores.
Based on aggregated weights, the criterion ‘lapses’ (C2) was found to be the ultimate critical factor connected to road safety. Previous outcomes of the factor analysis depicted that mostly lapses elements loaded on errors, which was a combination of lapses and errors and some violation elements [
61]. The criteria ‘fail to apply brakes in road hazards’ (C33), ‘violations’ (C1), ‘driver inattention’ (C21), and ‘aggressive violations’ (C12) were also found to be major risks due to high weight scores. However, the criterion ‘disobey speed limits’ (C121) was found to be the least critical factor as compared to other observed factors while ‘disobey overtaking rules’ (C125) was observed as the second-least critical factor connected to road safety. A previous questionnaire-based study found that Budapest drivers were less compliant with speed limits [
62], while a recent study observed the complex relationships of significant driver behavior factors related to road safety in decision-making, which aids in consequently improving the consistency of decisions for sustainable traffic safety. Linkage of research data with transport authorities and traffic management agencies could aid in implementing effective road safety plans and increasing the sustainable level of traffic safety [
20]. Some of the improvements that a city can make for establishing a sustainable transport system and decreasing traffic accidents are setting high standards of training for public transit drivers, ensuring compliance to safe operation measures, establishment of safe crosswalks and other pedestrian infrastructure, conducting a safety audit of the road network, and setting up dedicated lanes for public transit buses [
13].
4.1. Comparative Analysis
Optimism and pessimism are basic personal–psychological attributes that both define and indicate how a person reacts to his or her professed environment. Optimists interpret their lives and future conditions of the world positively, while pessimists interpret their lives and future conditions of the world depressingly. Similarly, optimists think in terms of high overall efficacy and promising results, but pessimists think in terms of less overall efficacy and undesirable results [
63]. Psychology indicates that in a core network, dispositional optimism mechanism allows for evolving coping behavior or habits that are more expected to lead to anticipated results [
64,
65].
In the interpretation of multi-criteria decision-making issues, optimism and pessimism can imitate individual variances of different decision makers. Besides, they manage to be both dependable and durable. It shows that optimism and pessimism reliably impact how the decision maker responds to a decision environment. Hence, an understanding of their impact on the decision-making procedure is very useful and valuable in multiple criteria decision study [
63]. In our application, driver behavior factors and sub-factors are evaluated based on the no-dependency-among-themselves situation. Through that, the PF-AHP method is performed. For a comparison of the outcomes, we develop pessimistic estimations based on the DEMATEL technique, where pessimism is measured using pessimistic point operators. With a pessimistic attitude, driver behavior factors and sub-factors affect each other and cause high-risk driver behavior, affecting road safety. Through the outcomes of DEMATEL, dependencies are determined and a network of criteria is constructed. Then, based on the dependencies, pairwise comparison matrices are re-constructed. Based on the results of re-constructed pairwise comparison matrices, a supermatrix is constructed and then converged to obtain the new weights of driver behavior criteria connected to road safety. Two academicians who are experts in human behavioral effects on traffic safety evaluate the criteria for the Pythagorean DEMATEL method. Based on the evaluations, dependencies are determined (
Appendix B).
Based on the dependencies, the network of criteria and pairwise comparison matrices are constructed. Since there is no dependency between C11 and C12 with any other criteria, they are evaluated out of the network separately. Based on the calculations, the weights of the criteria are calculated as in
Table 11.
For Level-3 criteria, weights are calculated as in
Table 12.
Through the results, the most important criteria remain the same at each level. Moreover, C11 and C12 are not evaluated with respect to Level-2 criteria network since they have no dependency on any Level-2 criteria.
4.2. Sensitivity Analysis
The reliability of the model is supported by sensitivity analyses that observe a range for the weights’ values and are consistent with alternative outcomes. One-at-a-time sensitivity analyses are also applied to observe the shifts in all levels. The analyses are based on group dominance. For each group, weights are assigned, and then the shifts are observed. The pattern for the analyses is given in
Table 13:
We first check Level 1, which is for the main criteria.
Figure 2 presents the shifts with respect to weight changes of the groups.
To visualize more clearly, the weights of the groups are multiplied by 10. As it can be seen from
Figure 2, criterion C1 has small changes for each group. It is also deduced that its weight is the ultimate consistent when compared with other criteria over each group’s dominance. For criterion C2, it staidly decreases against other criteria while the weights of the groups increase. Criterion C3 fluctuates most based on the changes. Moreover, when the dominance group is Group 1, criterion C3 has the highest weight when compared with other criteria. Also, in all levels of weights for the groups, Group 1 affects criteria at most. As a result of this analysis, one infers that C1 has the maximum consensus level. The groups are assigned approximate values when they evaluate it. In the same way, C3 criterion has the ultimate fluctuated values during evaluation. For further research, we believe that more focus groups are needed to evaluate the C3 criterion.
Secondly, the pattern is applied to Level-2 criteria.
Figure 3 presents the shifts with respect to weight changes of the groups.
At first, as a result of the application, criterion C33 has the highest weight and criterion while C22 has the lowest. During the sensitivity analysis, the ranks are mostly preserved except for some shifts. Criterion C33 is affected most when it is compared with other criteria. Its peak points are obtained when the weights of Group 2 are equal to 0.5 and 0.7, respectively. Criterion C33 and criterion C21 are almost converged while the weights of Group 1 equal 0.7. Moreover, they have approximate values in the below situations:
Group 1 weight is equal to 0.6, therefore Group 2 and Group 3 are equal to 0.20.
Group 1 weight is equal to 0.7, and the others are 0.15.
Group 2 weight is equal to 0.6, and the others are 0.20.
Group 3 weight is equal to 0.5, and the others are 0.25.
Group 3 weight is equal to 0.6, and the others are 0.20.
In addition, C11 has the second rank when the weight of Group 2 is equal to 0.5. However, after that level, it tends to fall. The ultimate constant criteria among Level-2 criteria are criterion C31 and criterion C22. During the pattern, their values are the least affected criteria. Their evaluation for the group is mostly converged.
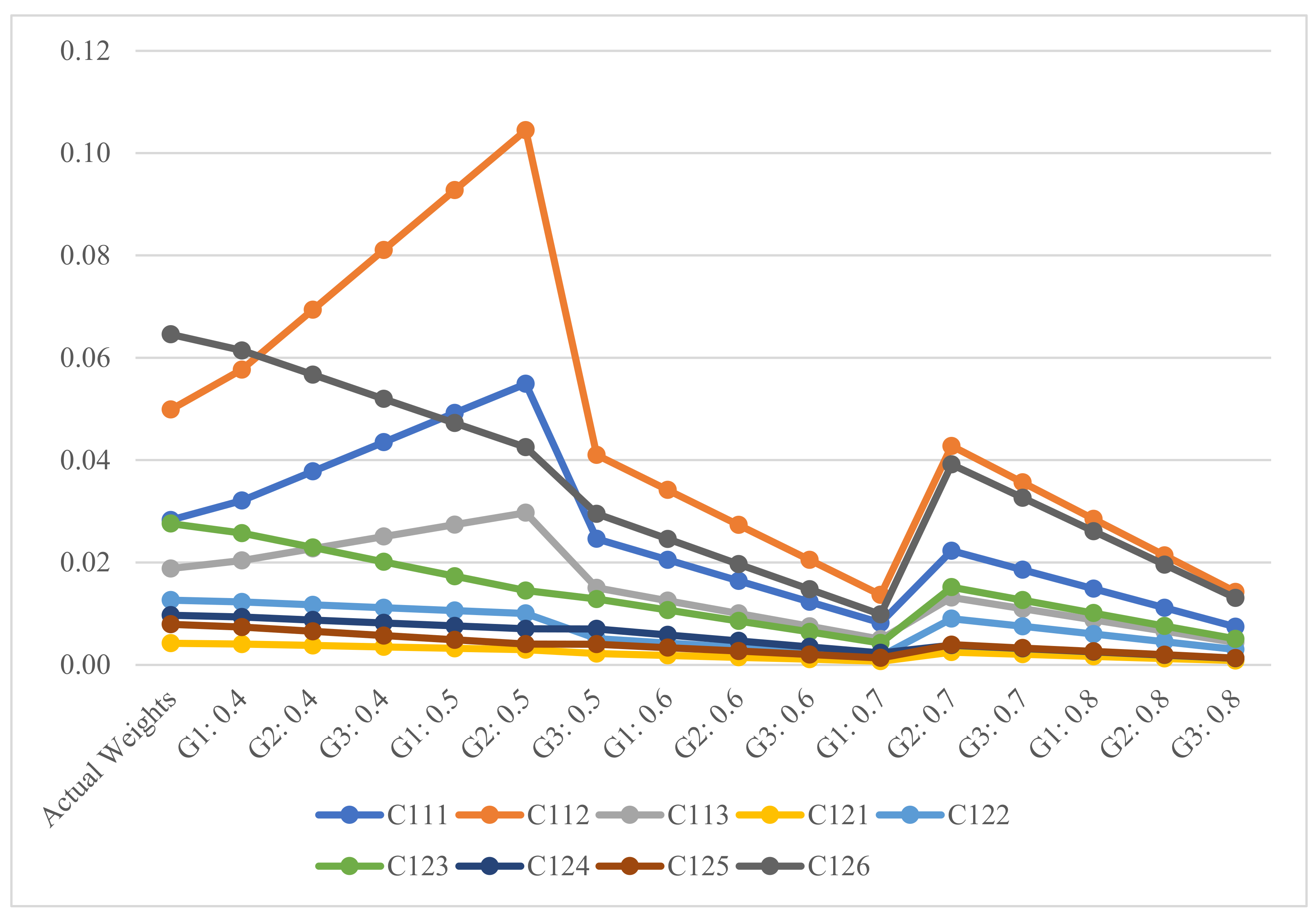
Lastly, we also check the effects of the groups for Level 3.
Figure 4 presents the shifts with respect to weight changes of the groups.
In third-level analysis, since the weights are mostly less than 0.1, shifts are fewer than other levels. When the weights of the groups are increased, criterion C112 moves into first place and has the maximum weight among Level-3 criteria. The two peak points are reached when the weights of Group 2 are equal to 0.5 and 0.7. Moreover, when Group 1 and Group 2 weights are equal to 0.5, C111 moves to second rank. Since the weights of C121, C122, C124, and C125 are small values, the dominance of the groups over them is affected slightly.
Through the analyses, it is observed that all PCMs are sensitive to changes in group weights. Since the ultimate effective criteria have remained in most cases, it can be said that the result of the application is reliable against variations in main criteria weights.
5. Conclusions
The consistency and, conversely, conflicts in driver behavior factors inducing crash risk may alternate due to different driving characteristics. The PF-AHP method is a useful evaluation to overcome uncertainty of driver behavior in managing complex road safety issues. For driver group G1, application outcomes depicted ‘errors’ (C3) as the ultimate critical factor connected to road safety for Level 1 of the hierarchical model. For Level 2, the application outcomes showed ‘fail to apply brakes in road hazards’ (C33) as the ultimate critical factor, followed by ‘ordinary violations’ (C11). For Level 3, application outcomes showed ‘fail to maintain a safe gap’ (C112) as the ultimate critical factor followed by ‘fail to use personal intelligence’ (C111). For driver group G2, application outcomes showed ‘lapses’ (C2) and ‘errors’ (C3) as the ultimate critical factor connected to road safety for Level 1 of the hierarchical structure. For Level 2, application outcomes showed ‘fail to apply brakes in road hazards’ (C33) as the ultimate critical factor followed by ‘hit something that had not been seen when reversing’ (C23). For Level 3, application outcomes showed ‘drive with alcohol use’ (C126) as the utmost critical factor followed by ‘disobey traffic lights’ (C123).
For driver group G3, application outcomes showed ‘lapses’ (C2) as the most critical factor connected to road safety for Level 1 of the hierarchical model. For Level 2, application outcomes showed ‘driver inattention’ (C21) as the utmost critical factor followed by ‘hit something that had not been seen when reversing’ (C23). For Level 3, application outcomes showed ‘drive with alcohol use’ (C126) as the uttermost critical factor followed by ‘disobey traffic lights’ (C123). Based on aggregated weights, the criteria ‘lapses’ (C2) is the most critical factor connected to road safety as compared to all other specified factors. The criterion ‘disobey speed limits’ (C121) is found to be the least critical factor as compared to other observed factors. This evaluation could be valuable in making drivers aware of individual traffic risks for each country. Linkage of estimated data with traffic authorities may also assist in the implementation of effective local road safety policies.
Since our system has presented meaningful outcomes based on calculations we made, it can be a useful decision-making support technique to deal with uncertain data. Researchers and policymakers can implement our model to obtain robust outcomes that are backed by sensitivity analyses.
For further studies, data can be extended by adding new surveys from cities that have a similar social background [
66]. Comparison of different data sets can enable us to extend this work to construct proactive behavioral systems. Moreover, a new section of questionnaires can be added to measure indeterminacy. As a new uncertainty characteristic needs to be overcome through the calculations, neutrosophic or hesitant sets can be applied to handle it [
67,
68,
69] while other significant elements of the transport system, such as vehicles, road infrastructure, and the environment, should be studied dynamically for achieving sustainable development goals.





{kind=link}
{kind=link}
{kind=link}
{kind=link}



