
Charging and Discharging of Electric Vehicles in Power Systems: An Updated and Detailed Review of Methods, Control Structures, Objectives, and Optimization Methodologies

 , , ,
, , ,
Abstract
:1. Introduction
2. Methodologies for Charging EV Batteries in the Power System
2.1. Conductive Charging
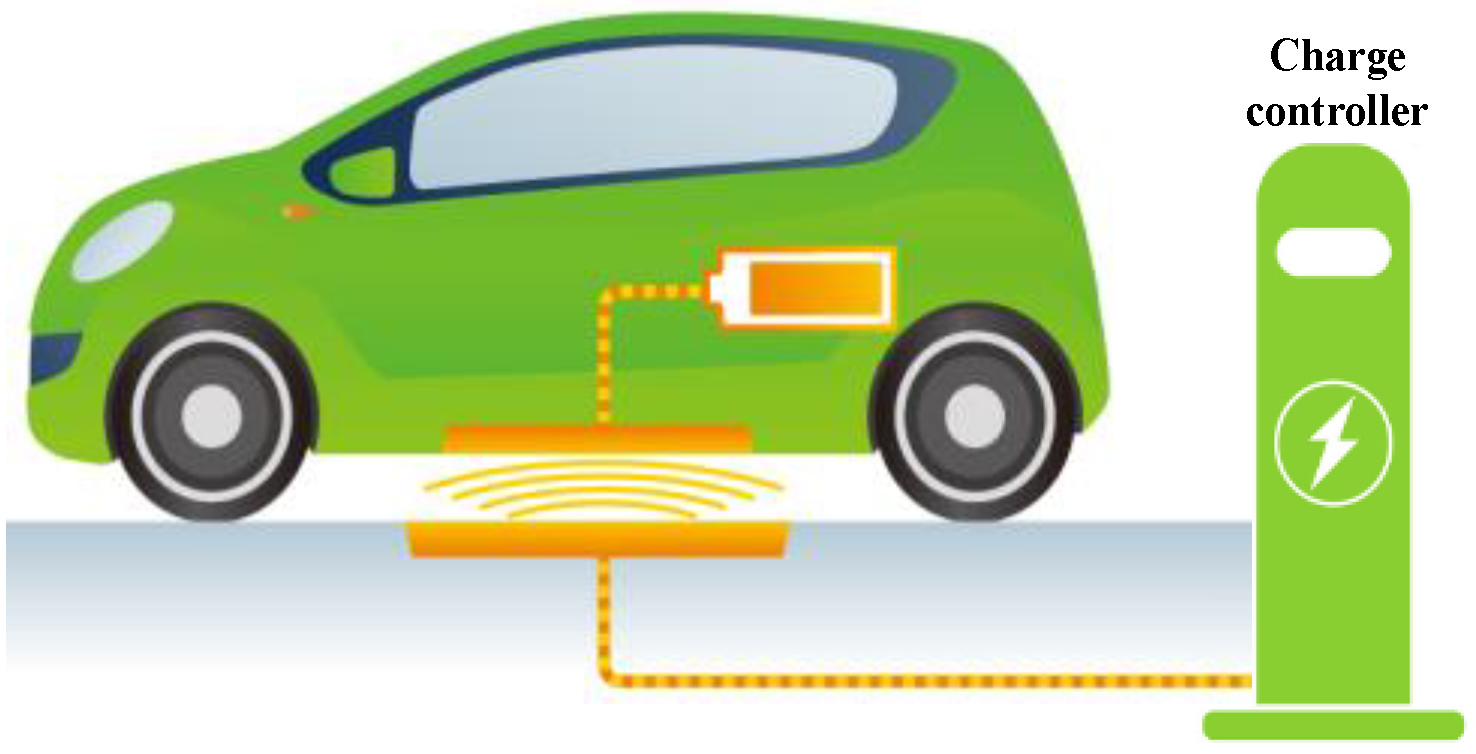
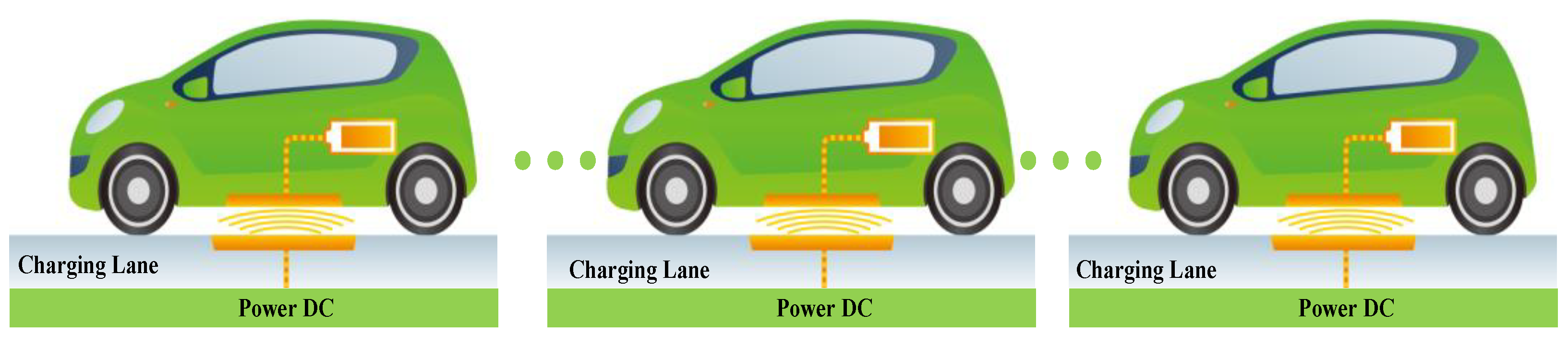
2.2. Inductive Charging
2.3. Battery Swapping
3. EV Charge and Discharge Control Structures in the Power System
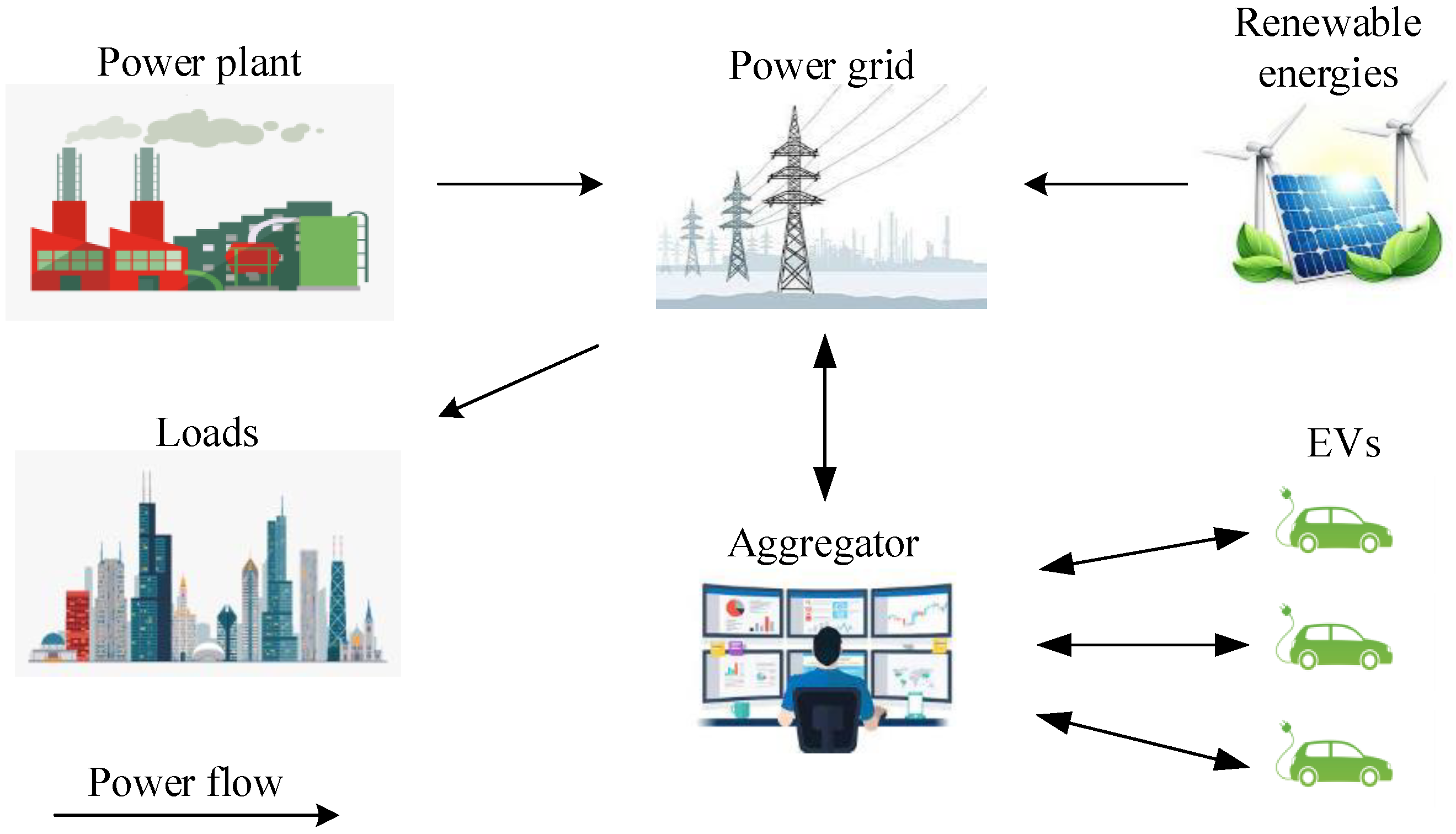
3.1. Centralized Control Structure
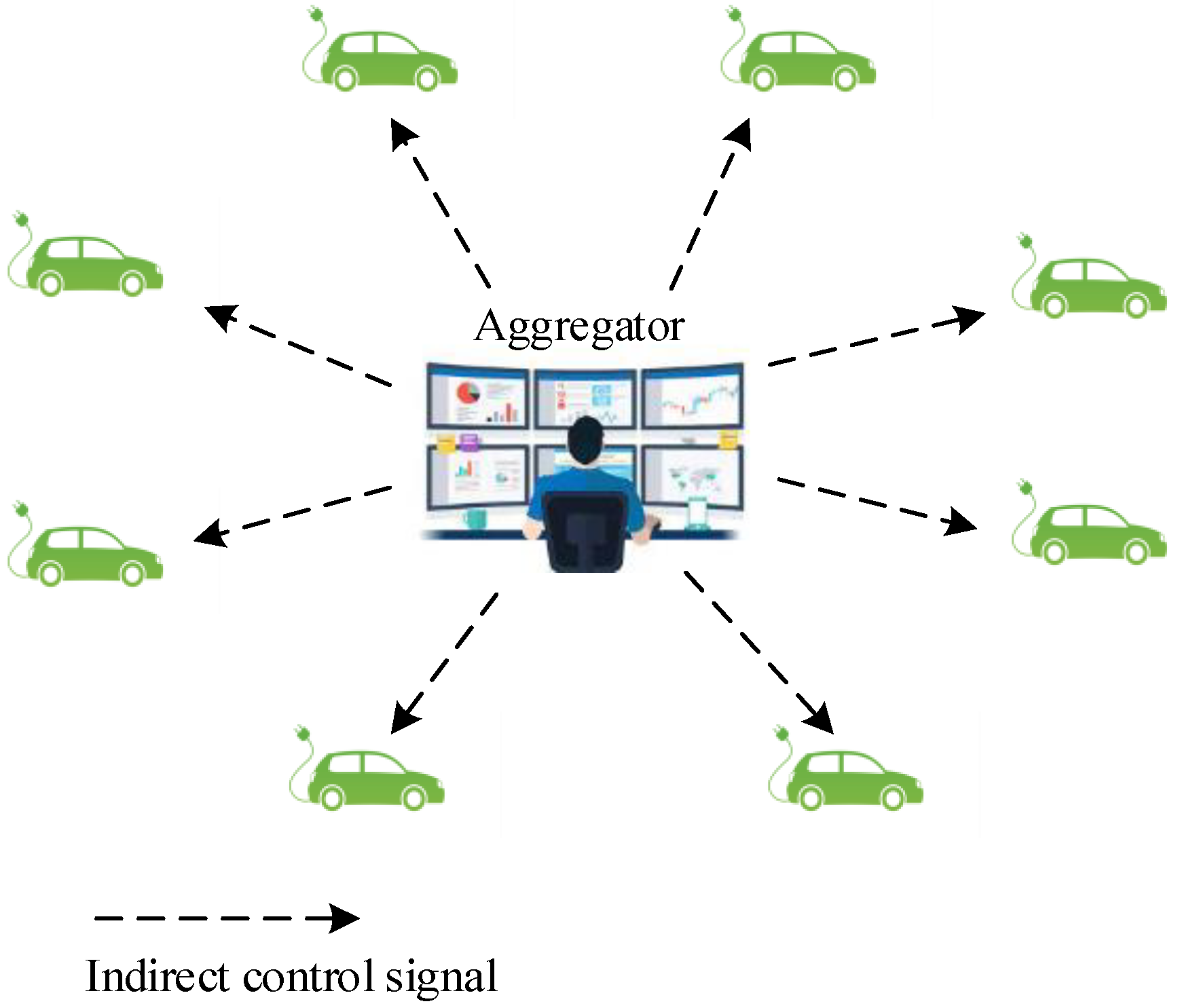
3.2. Decentralized Control Structure
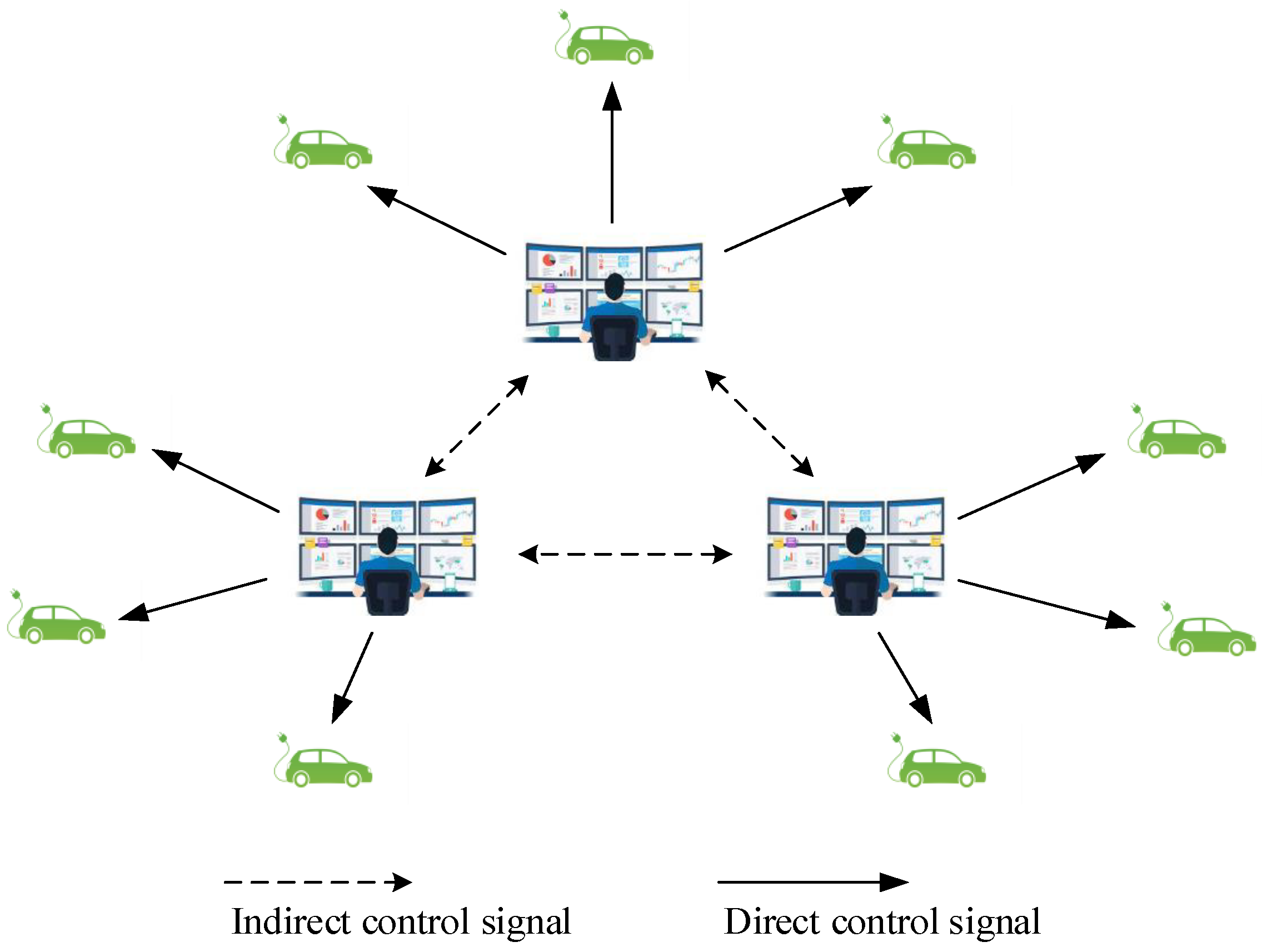
3.3. Hierarchical Control Structure
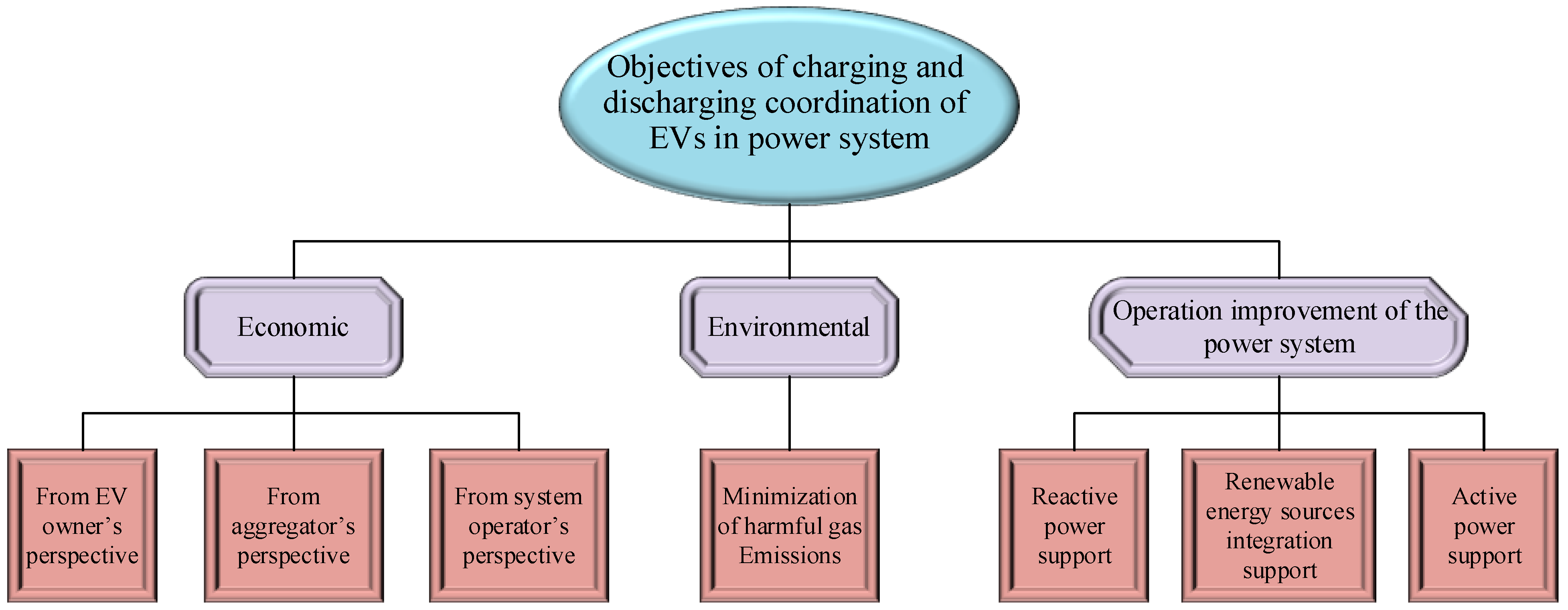
4. Optimization Objectives of EV Charging/Discharging in Power Systems
4.1. Improvement of the Power Grid’s Operation
4.1.1. Active Power Support
Frequency Regulation
Minimization of Load Fluctuations
Peak shaving and Valley Filling
Voltage Regulation with Active Power Management
Minimization of Losses by Managing the Active Power
4.1.2. Reactive Power Support
Voltage Regulation with Reactive Power Management
Minimization of Losses by Managing the Reactive Power
4.1.3. Support for the Integration of Renewable Energy Sources
4.2. Economic Objectives
4.2.1. System Operator Point of View
4.2.2. EV Aggregator’s Point of View
4.2.3. EV Owner’s Point of View
4.3. Environmental Goals
4.4. Mathematical Models and EV Charge and Discharge Optimization Methods
5. The Main Challenge of V2G Technology: EV Battery Degradation
6. Discussion, Future Trends, and Suggestions
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Saldaña, G.; San Martín, J.I.; Zamora, I.; Asensio, F.J.; Oñederra, O. Electric Vehicle into the Grid: Charging Methodologies Aimed at Providing Ancillary Services Considering Battery Degradation. Energies 2019, 12, 2443. [Google Scholar] [CrossRef] [Green Version]
- Mukherjee, J.C.; Gupta, A. A Review of Charge Scheduling of Electric Vehicles in Smart Grid. IEEE Syst. J. 2014, 9, 1541–1553. [Google Scholar] [CrossRef]
- International Energy Agency (IEA). Global EV Outlook 2018—Towards Cross-Modal Electrification. 2018. Available online: https://www.iea.org/reports/global-ev-outlook-2018 (accessed on 25 January 2022).
- Janjic, A.; Velimirovic, L.; Stankovic, M.; Petrusic, A. Commercial electric vehicle fleet scheduling for secondary frequency control. Electr. Power Syst. Res. 2017, 147, 31–41. [Google Scholar] [CrossRef]
- Wang, Y.; John, T.; Xiong, B. A two-level coordinated voltage control scheme of electric vehicle chargers in low-voltage distribution networks. Electr. Power Syst. Res. 2018, 168, 218–227. [Google Scholar] [CrossRef]
- Erden, F.; Kisacikoglu, M.C.; Erdogan, N. Adaptive V2G Peak Shaving and Smart Charging Control for Grid Integration of PEVs. Electr. Power Components Syst. 2018, 46, 1494–1508. [Google Scholar] [CrossRef]
- Jian, L.; Zheng, Y.; Shao, Z. High efficient valley-filling strategy for centralized coordinated charging of large-scale electric vehicles. Appl. Energy 2017, 186, 46–55. [Google Scholar] [CrossRef]
- Wang, J.; Bharati, G.R.; Paudyal, S.; Ceylan, O.; Bhattarai, B.P.; Myers, K.S. Coordinated Electric Vehicle Charging with Reactive Power Support to Distribution Grids. IEEE Trans. Ind. Inform. 2018, 15, 54–63. [Google Scholar] [CrossRef]
- Gong, L.; Cao, W.; Liu, K.; Yu, Y.; Zhao, J. Demand responsive charging strategy of electric vehicles to mitigate the volatility of renewable energy sources. Renew. Energy 2020, 156, 665–676. [Google Scholar] [CrossRef]
- Hu, J.; You, S.; Lind, M.; Østergaard, J. Coordinated charging of electric vehicles for congestion prevention in the distribution grid. IEEE Trans. Smart Grid 2013, 5, 703–711. [Google Scholar] [CrossRef] [Green Version]
- Momen, H.; Abessi, A.; Jadid, S. Using EVs as distributed energy resources for critical load restoration in resilient power distribution systems. IET Gener. Transm. Distrib. 2020, 14, 3750–3761. [Google Scholar] [CrossRef]
- Sadeghian, O.; Nazari-Heris, M.; Abapour, M.; Taheri, S.S.; Zare, K. Improving reliability of distribution networks using plug-in electric vehicles and demand response. J. Mod. Power Syst. Clean Energy 2019, 7, 1189–1199. [Google Scholar] [CrossRef] [Green Version]
- Bañol, A.N.; Hashemi, S.; Andersen, P.B.; Træholt, C.; Romero, R. Distribution system services provided by electric vehicles: Recent status, challenges, and future prospects. IEEE Trans. Intell. Trans-Portation Syst. 2019, 20, 4277–4296. [Google Scholar] [CrossRef] [Green Version]
- Yanchong, Z.; Niu, S.; Shang, Y.; Shao, Z.; Jian, L. Integrating plug-in electric vehicles into power grids: A comprehensive review on power interaction mode, scheduling methodology and mathematical founda-tion. Renew. Sustain. Energy Rev. 2019, 112, 424–439. [Google Scholar]
- Nimalsiri, N.I.; Mediwaththe, C.P.; Ratnam, E.L.; Shaw, M.; Smith, D.B.; Halgamuge, S.K. A Survey of Algorithms for Distributed Charging Control of Electric Vehicles in Smart Grid. IEEE Trans. Intell. Transp. Syst. 2019, 21, 4497–4515. [Google Scholar] [CrossRef] [Green Version]
- Ali, A.; Mohammadi-Ivatloo, B.; Elkamel, A. A Review on Plug-In Electric Vehicles: Introduction, Current Status, and Load Modeling Techniques. J. Mod. Power Syst. Clean Energy 2020, 3, 412–425. [Google Scholar]
- Arias-Londoño, A.; Montoya, O.D.; Grisales-Noreña, L.F. A Chronological Literature Review of Electric Vehicle Interactions with Power Distribution Systems. Energies 2020, 13, 3016. [Google Scholar] [CrossRef]
- Pearre, N.S.; Ribberink, H. Review of research on V2X technologies, strategies, and operations. Renew. Sustain. Energy Rev. 2019, 105, 61–70. [Google Scholar] [CrossRef]
- Kong, P.-Y.; Karagiannidis, G.K. Charging Schemes for Plug-In Hybrid Electric Vehicles in Smart Grid: A Survey. IEEE Access 2016, 4, 6846–6875. [Google Scholar] [CrossRef]
- Junjie, H.; Morais, H.; Sousa, T.; Lind, M. Electric vehicle fleet management in smart grids: A review of services, optimization and control aspects. Renew. Sustain. Energy Rev. 2016, 56, 1207–1226. [Google Scholar]
- Salman, H.; Khan, M.M.; Abbas, F.; Sang, L.; Shahid, M.U.; Tang, H. A comprehensive study of implemented international standards, technical challenges, impacts and prospects for electric vehicles. IEEE Access 2018, 6, 13866–13890. [Google Scholar]
- Ying, Y.J.; Ramachandaramurthy, V.K.; Tan, K.M.; Mithulananthan, N. A review on the state-of-the-art technologies of electric vehicle, its impacts and prospects. Renew. Sustain. Energy Rev. 2015, 49, 365–385. [Google Scholar] [CrossRef]
- Hussain, S.; Islam, M.M.; Mohamed, A. A review of the stage-of-the-art charging technologies, placement methodologies, and impacts of electric vehicles. Renew. Sustain. Energy Rev. 2016, 64, 403–420. [Google Scholar]
- Yang, Z.; Li, K.; Foley, A. Computational scheduling methods for integrating plug-in electric vehicles with power systems: A review. Renew. Sustain. Energy Rev. 2015, 51, 396–416. [Google Scholar] [CrossRef]
- Muhammad, A.; Ahmad, A.; Rehmani, M.H.; Umer, T. A review of EVs charging: From the per-spective of energy optimization, optimization approaches, and charging techniques. Transp. Res. Part D Transp. Environ. 2018, 62, 386–417. [Google Scholar]
- Tan, K.M.; Ramachandaramurthy, V.K.; Yong, J.Y. Integration of electric vehicles in smart grid: A review on vehicle to grid technologies and optimization techniques. Renew. Sustain. Energy Rev. 2016, 53, 720–732. [Google Scholar] [CrossRef]
- Rezvani, Z.; Jansson, J.; Bodin, J. Advances in consumer electric vehicle adoption research: A review and research agenda. Transp. Res. Part D Transp. Environ. 2015, 34, 122–136. [Google Scholar] [CrossRef] [Green Version]
- Ning, D.; Prasad, K.; Lie, T.T. The electric vehicle: A review. Int. J. Electr. Hybrid Veh. 2017, 9, 49–66. [Google Scholar]
- Mahmoudzadeh, A.A.; Pesiridis, A.; Rajoo, S.; Martinez-Botas, R.; Esfahanian, V. A review of Battery Electric Vehicle technology and readiness levels. Renew. Sustain. Energy Rev. 2017, 78, 414–430. [Google Scholar] [CrossRef]
- Kumar, R.R.; Alok, K. Adoption of electric vehicle: A literature review and prospects for sustainability. J. Clean. Prod. 2020, 253, 119911. [Google Scholar] [CrossRef]
- Ramadhani, U.H.; Shepero, M.; Munkhammar, J.; Widén, J.; Etherden, N. Review of probabilistic load flow approaches for power distribution systems with photovoltaic generation and electric vehicle charging. Int. J. Electr. Power Energy Syst. 2020, 120, 106003. [Google Scholar] [CrossRef]
- Solanke, T.U.; Ramachandaramurthy, V.K.; Yong, J.Y.; Pasupuleti, J.; Kasinathan, P.; Rajagopalan, A. A review of strategic charging–discharging control of gridconnected electric vehicles. J. Energy Storage 2020, 28, 101193. [Google Scholar] [CrossRef]
- Ahmad, A.; Khan, Z.A.; Alam, M.; Khateeb, S. A Review of the Electric Vehicle Charging Techniques, Standards, Progression and Evolution of EV Technologies in Germany. Smart Sci. 2017, 6, 36–53. [Google Scholar] [CrossRef]
- Khalid, M.R.; Alam, M.S.; Sarwar, A.; Asghar, M.J. A Comprehensive review on electric vehicles charging infrastructures and their impacts on power-quality of the utility grid. eTransportation 2019, 1, 100006. [Google Scholar] [CrossRef]
- Habib, S.; Khan, M.M.; Huawei, J.; Hashmi, K.; Faiz, M.T.; Tang, H. A study of implemented international standards and infrastructural system for electric vehicles. In Proceedings of the 2018 IEEE International Conference on Industrial Technology (ICIT), Lyon, France, 20–22 February 2018; pp. 1783–1788. [Google Scholar]
- SAE Standard J1772; SAE Electric Vehicle and Plug-In Hybrid Electric Vehicle Conductive Charge Coupler. Society of Automotive Engineers (SAE): Warrendale, PA, USA, 2010.
- Mou, X.; Zhang, Y.; Jiang, J.; Sun, H. Achieving Low Carbon Emission for Dynamically Charging Electric Vehicles Through Renewable Energy Integration. IEEE Access 2019, 7, 118876–118888. [Google Scholar] [CrossRef]
- Chirag, P.; Stegen, S.; Lu, J. Review of static and dynamic wireless electric vehicle charging system. Eng. Sci. Technol. Int. J. 2018, 21, 922–937. [Google Scholar]
- Ahmad, F.; Alam, M.S.; Alsaidan, I.S.; Shariff, S.M. Battery swapping station for electric vehicles: Opportunities and challenges. IET Smart Grid 2020, 3, 280–286. [Google Scholar] [CrossRef]
- William, I.; Ma, J.; Han, X.; Liebman, A. Optimal recourse strategy for battery swapping stations considering electric vehicle uncertainty. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1369–1379. [Google Scholar]
- Amiri, S.S.; Jadid, S.; Saboori, H. Multi-objective optimum charging management of electric vehicles through battery swapping stations. Energy 2018, 165, 549–562. [Google Scholar] [CrossRef]
- Rao, R.; Zhang, X.; Xie, J.; Ju, L. Optimizing electric vehicle users’ charging behavior in battery swapping mode. Appl. Energy 2015, 155, 547–559. [Google Scholar] [CrossRef]
- Alshahrani, S.; Khalid, M.; Almuhaini, M. Electric Vehicles Beyond Energy Storage and Modern Power Networks: Challenges and Applications. IEEE Access 2019, 7, 99031–99064. [Google Scholar] [CrossRef]
- Einaddin, A.H.; Yazdankhah, A.S. A novel approach for multi-objective optimal scheduling of large-scale EV fleets in a smart distribution grid considering realistic and stochastic modeling framework. Int. J. Electr. Power Energy Syst. 2019, 117, 105617. [Google Scholar] [CrossRef]
- Tan, K.M.; Ramachandaramurthy, V.K.; Yong, J.Y. Optimal vehicle to grid planning and scheduling using double layer multi-objective algorithm. Energy 2016, 112, 1060–1073. [Google Scholar] [CrossRef]
- Suyono, H.; Rahman, M.T.; Mokhlis, H.; Othman, M.; Illias, H.A.; Mohamad, H. Optimal Scheduling of Plug-in Electric Vehicle Charging Including Time-of-Use Tariff to Minimize Cost and System Stress. Energies 2019, 12, 1500. [Google Scholar] [CrossRef] [Green Version]
- Islam, R.; Lu, H.; Hossain, J.; Li, L. Multiobjective Optimization Technique for Mitigating Unbalance and Improving Voltage Considering Higher Penetration of Electric Vehicles and Distributed Generation. IEEE Syst. J. 2020, 14, 3676–3686. [Google Scholar] [CrossRef]
- Bahrami, S.; Parniani, M. Game Theoretic Based Charging Strategy for Plug-in Hybrid Electric Vehicles. IEEE Trans. Smart Grid 2014, 5, 2368–2375. [Google Scholar] [CrossRef]
- Liu, Z.; Wu, Q.; Huang, S.; Wang, L.; Shahidehpour, M.; Xue, Y. Optimal Day-Ahead Charging Scheduling of Electric Vehicles Through an Aggregative Game Model. IEEE Trans. Smart Grid 2017, 9, 5173–5184. [Google Scholar] [CrossRef] [Green Version]
- Olivier, B.; Lasaulce, S.; Hennebel, M.; Mohand-Kaci, I. Reducing the impact of EV charging oper-ations on the distribution network. IEEE Trans. Smart Grid 2016, 7, 2666–2679. [Google Scholar]
- Liu, M.; Phanivong, P.K.; Shi, Y.; Callaway, D.S. Decentralized charging control of electric vehicles in residential distri-bution networks. IEEE Trans. Control. Syst. Technol. 2017, 27, 266–281. [Google Scholar] [CrossRef] [Green Version]
- Cardona, J.E.; López, J.C.; Rider, M.J. Decentralized electric vehicles charging coordination using only local voltage magnitude measurements. Electr. Power Syst. Res. 2018, 161, 139–151. [Google Scholar] [CrossRef]
- Maryam, M.; Monsef, H.; Lesani, H. A decentralized robust model for coordinated operation of smart dis-tribution network and electric vehicle aggregators. Int. J. Electr. Power Energy Syst. 2019, 104, 853–867. [Google Scholar]
- Wu, D.; Radhakrishnan, N.; Huang, S. A hierarchical charging control of plug-in electric vehicles with simple flexibility model. Appl. Energy 2019, 253, 113490. [Google Scholar] [CrossRef]
- Junjie, H.; Saleem, A.; You, S.; Nordström, L.; Lind, M.; Østergaard, J. A multiagent system for distribution grid congestion management with electric vehicles. Eng. Appl. Artif. Intell. 2015, 38, 45–58. [Google Scholar]
- Hu, J.; Si, C.; Lind, M.; Yu, R. Preventing Distribution Grid Congestion by Integrating Indirect Control in a Hierarchical Electric Vehicles’ Management System. IEEE Trans. Transp. Electrif. 2016, 2, 290–299. [Google Scholar] [CrossRef] [Green Version]
- Yao, W.; Zhao, J.; Wen, F.; Xue, Y.; Ledwich, G. A Hierarchical Decomposition Approach for Coordinated Dispatch of Plug-in Electric Vehicles. IEEE Trans. Power Syst. 2013, 28, 2768–2778. [Google Scholar] [CrossRef]
- Shao, C.; Wang, X.; Wang, X.; Du, C.; Wang, B. Hierarchical Charge Control of Large Populations of EVs. IEEE Trans. Smart Grid 2015, 7, 1147–1155. [Google Scholar] [CrossRef]
- Xu, Z.; Hu, Z.; Song, Y.; Zhao, W.; Zhang, Y. Coordination of PEVs charging across multiple aggregators. Appl. Energy 2014, 136, 582–589. [Google Scholar] [CrossRef]
- Liu, H.; Huang, K.; Wang, N.; Qi, J.; Wu, Q.; Ma, S.; Li, C. Optimal dispatch for participation of electric vehicles in frequency regulation based on area control error and area regulation requirement. Appl. Energy 2019, 240, 46–55. [Google Scholar] [CrossRef]
- Kaur, K.; Kumar, N.; Singh, M. Coordinated Power Control of Electric Vehicles for Grid Frequency Support: MILP-Based Hierarchical Control Design. IEEE Trans. Smart Grid 2018, 10, 3364–3373. [Google Scholar] [CrossRef]
- Wang, L.; Chen, B. Dual-level consensus-based frequency regulation using vehicle-to-grid service. Electr. Power Syst. Res. 2018, 167, 261–276. [Google Scholar] [CrossRef]
- Xiangyu, C.; Leung, K.; Lam, A.Y.S.; Hill, D.J. Online scheduling for hierarchical vehicle-to-grid system: Design, formulation, and algorithm. IEEE Trans. Veh. Technol. 2018, 68, 1302–1317. [Google Scholar]
- Mehta, R.; Verma, P.; Srinivasan, D.; Yang, J. Double-layered intelligent energy management for optimal integration of plug-in electric vehicles into distribution systems. Appl. Energy 2018, 233–234, 146–155. [Google Scholar] [CrossRef]
- Feshki, F.H. Improving voltage unbalance of low-voltage distribution networks using plug-in electric vehicles. J. Clean. Prod. 2017, 148, 336–346. [Google Scholar]
- Zecchino, A.; Prostejovsky, A.M.; Ziras, C.; Marinelli, M. Large-scale provision of frequency control via V2G: The Bornholm power system case. Electr. Power Syst. Res. 2019, 170, 25–34. [Google Scholar] [CrossRef]
- Zakariazadeh, A.; Jadid, S.; Siano, P. Integrated operation of electric vehicles and renewable generation in a smart distribution system. Energy Convers. Manag. 2015, 89, 99–110. [Google Scholar] [CrossRef]
- Xiaoqing, B.; Qiao, W. Robust optimization for bidirectional dispatch coordination of large-scale V2G. IEEE Trans. Smart Grid 2015, 6, 1944–1954. [Google Scholar]
- Cao, Y.; Huang, L.; Li, Y.; Jermsittiparsert, K.; Nezamabad, H.A.; Nojavan, S. Optimal scheduling of electric vehicles aggregator under market price uncertainty using robust optimization technique. Int. J. Electr. Power Energy Syst. 2020, 117. [Google Scholar] [CrossRef]
- Bellocchi, S.; Klöckner, K.; Manno, M.; Noussan, M.; Vellini, M. On the role of electric vehicles towards low-carbon energy systems: Italy and Germany in comparison. Appl. Energy 2019, 255, 113848. [Google Scholar] [CrossRef]
- García-Villalobos, J.; Zamora, I.; Knezović, K.; Marinelli, M. Multi-objective optimization control of plug-in electric vehicles in low voltage distribution networks. Appl. Energy 2016, 180, 155–168. [Google Scholar] [CrossRef] [Green Version]
- Peng, C.; Zou, J.; Lian, L. Dispatching strategies of electric vehicles participating in frequency regulation on power grid: A review. Renew. Sustain. Energy Rev. 2017, 68, 147–152. [Google Scholar] [CrossRef]
- Nguyen, H.N.T.; Zhang, C.; Zhang, J. Dynamic Demand Control of Electric Vehicles to Support Power Grid with High Penetration Level of Renewable Energy. IEEE Trans. Transp. Electrif. 2016, 2, 66–75. [Google Scholar] [CrossRef]
- Ahn, C.; Li, C.-T.; Peng, H. Optimal decentralized charging control algorithm for electrified vehicles connected to smart grid. J. Power Sources 2011, 196, 10369–10379. [Google Scholar] [CrossRef]
- Amamra, S.-A.; Marco, J. Vehicle-to-Grid Aggregator to Support Power Grid and Reduce Electric Vehicle Charging Cost. IEEE Access 2019, 7, 178528–178538. [Google Scholar] [CrossRef]
- Ridoy, D.; Wang, Y.; Putrus, G.; Kotter, R.; Marzband, M.; Herteleer, B.; Warmerdam, J. Multi-objective techno-economic-environmental optimisation of electric vehicle for energy services. Appl. Energy 2020, 257, 113965. [Google Scholar]
- Peng, C.; Zou, J.; Lian, L.; Li, L. An optimal dispatching strategy for V2G aggregator participating in supplementary frequency regulation considering EV driving demand and aggregator’s benefits. Appl. Energy 2017, 190, 591–599. [Google Scholar] [CrossRef]
- Muhssin, M.T.; Obaid, Z.A.; Al-Anbarri, K.; Cipcigan, L.M.; Ajaweed, M.N. Local dynamic frequency response using domestic electric vehicles. Int. J. Electr. Power Energy Syst. 2021, 130, 106920. [Google Scholar] [CrossRef]
- Musa, K.; Sun, H.; Xiang, Y.; Shi, D. Electric vehicles participation in load frequency control based on mixed H2/H∞. Int. J. Electr. Power Energy Syst. 2021, 125, 106420. [Google Scholar]
- Fu, H.; Han, Y.; Wang, J.; Zhao, Q. A Novel Optimization of Plug-In Electric Vehicles Charging and Discharging Behaviors in Electrical Distribution Grid. J. Electr. Comput. Eng. 2018, 2018. [Google Scholar] [CrossRef]
- Ioakimidis, C.S.; Thomas, D.; Rycerski, P.; Genikomsakis, K.N. Peak shaving and valley filling of power consumption profile in non-residential buildings using an electric vehicle parking lot. Energy 2018, 148, 148–158. [Google Scholar] [CrossRef]
- Khemakhem, S.; Rekik, M.; Krichen, L. A flexible control strategy of plug-in electric vehicles operating in seven modes for smoothing load power curves in smart grid. Energy 2017, 118, 197–208. [Google Scholar] [CrossRef]
- Yang, J.; He, L.; Fu, S. An improved PSO-based charging strategy of electric vehicles in electrical distribution grid. Appl. Energy 2014, 128, 82–92. [Google Scholar] [CrossRef]
- Reddy, K.R.; Meikandasivam, S.; Vijayakumar, D. A novel strategy for maximization of plug-In electric vehicle’s storage utilization for grid support with consideration of customer flexibility. Electr. Power Syst. Res. 2019, 170, 158–175. [Google Scholar] [CrossRef]
- Tan, K.M.; Ramachandaramurthy, V.K.; Yong, J.Y.; Padmanaban, S.; Mihet-Popa, L.; Blaabjerg, F. Minimization of Load Variance in Power Grids—Investigation on Optimal Vehicle-to-Grid Scheduling. Energies 2017, 10, 1880. [Google Scholar] [CrossRef] [Green Version]
- Singh, J.; Tiwari, R. Real power loss minimisation of smart grid with electric vehicles using distribution feeder reconfiguration. IET Gener. Transm. Distrib. 2019, 13, 4249–4261. [Google Scholar] [CrossRef]
- Adetunji, K.; Hofsajer, I.; Cheng, L. A coordinated charging model for electric vehicles in a smart grid using whale optimization algorithm. In Proceedings of the 2020 IEEE 23rd International Conference on Information Fusion (FUSION), Rustenburg, South Africa, 6–9 July 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Khan, S.U.; Mehmood, K.K.; Haider, Z.M.; Rafique, M.K.; Khan, M.O.; Kim, C.-H. Coordination of Multiple Electric Vehicle Aggregators for Peak Shaving and Valley Filling in Distribution Feeders. Energies 2021, 14, 352. [Google Scholar] [CrossRef]
- Wang, N.; Li, B.; Duan, Y.; Jia, S. A multi-energy scheduling strategy for orderly charging and discharging of electric vehicles based on multi-objective particle swarm optimization. Sustain. Energy Technol. Assess. 2021, 44, 101037. [Google Scholar] [CrossRef]
- Hashim, M.S.; Yong, J.Y.; Ramachandaramurthy, V.K.; Tan, K.M.; Mansor, M.; Tariq, M. Priority-based vehicle-to-grid scheduling for minimization of power grid load variance. J. Energy Storage 2021, 39, 102607. [Google Scholar] [CrossRef]
- Khatiri-Doost, S.; Amirahmadi, M. Peak shaving and power losses minimization by coordination of plug-in electric vehicles charging and discharging in smart grids. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Milan, Italy, 6–9 June 2017; pp. 1–5. [Google Scholar]
- Mehta, R.; Srinivasan, D.; Khambadkone, A.M.; Yang, J.; Trivedi, A. Smart Charging Strategies for Optimal Integration of Plug-In Electric Vehicles within Existing Distribution System Infrastructure. IEEE Trans. Smart Grid 2016, 9, 299–312. [Google Scholar] [CrossRef]
- Liang, H.; Liu, Y.; Li, F.; Shen, Y. Dynamic Economic/Emission Dispatch Including PEVs for Peak Shaving and Valley Filling. IEEE Trans. Ind. Electron. 2018, 66, 2880–2890. [Google Scholar] [CrossRef]
- Panpan, M.; Wu, L.; Zhang, H.; Liu, Z. A hybrid multi-objective crisscross optimization for dynamic economic/emission dispatch considering plug-in electric vehicles penetration. Energies 2019, 12, 3847. [Google Scholar]
- Zhang, G.; Tan, S.T.; Wang, G.G. Real-Time Smart Charging of Electric Vehicles for Demand Charge Reduction at Non-Residential Sites. IEEE Trans. Smart Grid 2017, 9, 4027–4037. [Google Scholar] [CrossRef]
- Mediwaththe, C.P.; Smith, D.B. Game-Theoretic Electric Vehicle Charging Management Resilient to Non-Ideal User Behavior. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3486–3495. [Google Scholar] [CrossRef] [Green Version]
- Gong, L.; Cao, W.; Liu, K.; Zhao, J.; Li, X. Spatial and Temporal Optimization Strategy for Plug-In Electric Vehicle Charging to Mitigate Impacts on Distribution Network. Energies 2018, 11, 1373. [Google Scholar] [CrossRef] [Green Version]
- Akhavan-Rezai, E.; Shaaban, M.F.; El-Saadany, E.F.; Karray, F. Managing Demand for Plug-in Electric Vehicles in Unbalanced LV Systems with Photovoltaics. IEEE Trans. Ind. Inform. 2017, 13, 1057–1067. [Google Scholar] [CrossRef]
- Zeraati, M.; Golshan, M.E.H.; Guerrero, J.M. A Consensus-Based Cooperative Control of PEV Battery and PV Active Power Curtailment for Voltage Regulation in Distribution Networks. IEEE Trans. Smart Grid 2017, 10, 670–680. [Google Scholar] [CrossRef] [Green Version]
- Luo, X.; Chan, K.W. Real-time scheduling of electric vehicles charging in low-voltage residential distribution systems to minimise power losses and improve voltage profile. IET Gener. Transm. Distrib. 2014, 8, 516–529. [Google Scholar] [CrossRef]
- Pirouzi, S.; Latify, M.A.; Yousefi, G.R. Conjugate active and reactive power management in a smart distribution network through electric vehicles: A mixed integer-linear programming model. Sustain. Energy Grids Netw. 2020, 22, 100344. [Google Scholar] [CrossRef]
- Moein, M.; Abbaspour, A.; Fotuhi-Firuzabad, M. Online multicriteria framework for charging management of PHEVs. IEEE Trans. Veh. Technol. 2014, 63, 3028–3037. [Google Scholar] [CrossRef]
- Jabalameli, N.; Su, X.; Deilami, S. An Online Coordinated Charging/Discharging Strategy of Plug-in Electric Vehicles in Unbalanced Active Distribution Networks with Ancillary Reactive Service in the Energy Market. Energies 2019, 12, 1350. [Google Scholar] [CrossRef] [Green Version]
- Madahi, S.S.K.; Nafisi, H.; Abyaneh, H.A.; Marzband, M. Co-optimization of energy losses and transformer operating costs based on smart charging algorithm for plug-in electric vehicle parking lots. IEEE Trans. Transp. Electrif. 2020, 7, 527–541. [Google Scholar] [CrossRef]
- Azad-Farsani, E.; Abedini, S.; Sardou, I.G. Optimal coordination of plug-in hybrid electric vehicles: A stochastic market-based approach. J. Clean. Prod. 2021, 321, 128990. [Google Scholar] [CrossRef]
- Shahkamrani, A.; Askarian-Abyaneh, H.; Nafisi, H.; Marzband, M. A framework for day-ahead optimal charging scheduling of electric vehicles providing route mapping: Kowloon case study. J. Clean. Prod. 2021, 307, 127297. [Google Scholar] [CrossRef]
- Zhang, W.; Das, P.; Srinivasan, D. A vehicle-to-grid based reactive power dispatch approach using particle swarm optimization. In Proceedings of the 2016 IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016; pp. 4413–4420. [Google Scholar]
- Li, Y.; Li, L.; Peng, C.; Zou, J. An MPC based optimized control approach for EV-based voltage regulation in distribution grid. Electr. Power Syst. Res. 2019, 172, 152–160. [Google Scholar] [CrossRef]
- Leemput, N.; Geth, F.; Van Roy, J.; Büscher, J.; Driesen, J. Reactive power support in residential LV distribution grids through electric vehicle charging. Sustain. Energy Grids Netw. 2015, 3, 24–35. [Google Scholar] [CrossRef]
- Sasan, P.; Aghaei, J.; Vahidinasab, V.; Niknam, T.; Khodaei, A. Robust linear architecture for ac-tive/reactive power scheduling of EV integrated smart distribution networks. Electr. Power Syst. Res. 2018, 155, 8–20. [Google Scholar]
- Chukwu, U.C.; Mahajan, S.M. The prospects of v2g for reactive power compensation in electric distribution networks. In Proceedings of the 2019 IEEE Power & Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Kikusato, H.; Fujimoto, Y.; Hanada, S.-I.; Isogawa, D.; Yoshizawa, S.; Ohashi, H.; Hayashi, Y. Electric Vehicle Charging Management Using Auction Mechanism for Reducing PV Curtailment in Distribution Systems. IEEE Trans. Sustain. Energy 2019, 11, 1394–1403. [Google Scholar] [CrossRef] [Green Version]
- Katrin, S.; Jochem, P.; Fichtner, W. Integrating renewable energy sources by electric vehicle fleets under uncertainty. Energy 2017, 141, 2145–2153. [Google Scholar]
- Hasan, M.; Rakhshani, E. Vehicle-to-grid technology for cost reduction and uncertainty management integrated with solar power. J. Clean. Prod. 2019, 229, 463–469. [Google Scholar]
- Tushar, W.; Yuen, C.; Huang, S.; Smith, D.B.; Poor, H.V. Cost Minimization of Charging Stations with Photovoltaics: An Approach with EV Classification. IEEE Trans. Intell. Transp. Syst. 2015, 17, 156–169. [Google Scholar] [CrossRef] [Green Version]
- Hiroshi, K.; Mori, K.; Yoshizawa, S.; Fujimoto, Y.; Asano, H.; Hayashi, Y.; Kawashima, A.; Inagaki, S.; Suzuki, T. Electric vehicle charge–discharge management for utilization of photovoltaic by co-ordination between home and grid energy management systems. IEEE Trans. Smart Grid 2018, 10, 3186–3197. [Google Scholar]
- Raoofat, M.; Saad, M.; Lefebvre, S.; Asber, D.; Mehrjedri, H.; Lenoir, L. Wind power smoothing using demand response of electric vehicles. Int. J. Electr. Power Energy Syst. 2018, 99, 164–174. [Google Scholar] [CrossRef]
- Abbasi, M.H.; Taki, M.; Rajabi, A.; Li, L.; Zhang, J. Coordinated operation of electric vehicle charging and wind power generation as a virtual power plant: A multi-stage risk constrained approach. Appl. Energy 2019, 239, 1294–1307. [Google Scholar] [CrossRef]
- Sharifi, P.; Banerjee, A.; Feizollahi, M.J. Leveraging owners’ flexibility in smart charge/discharge scheduling of electric vehicles to support renewable energy integration. Comput. Ind. Eng. 2020, 149, 106762. [Google Scholar] [CrossRef]
- Zeynali, S.; Nasiri, N.; Marzband, M.; Ravadanegh, S.N. A hybrid robust-stochastic framework for strategic scheduling of integrated wind farm and plug-in hybrid electric vehicle fleets. Appl. Energy 2021, 300, 117432. [Google Scholar] [CrossRef]
- Szinai, J.K.; Sheppard, C.J.R.; Abhyankar, N.; Gopal, A.R. Reduced grid operating costs and renewable energy curtailment with electric vehicle charge management. Energy Policy 2020, 136, 111051. [Google Scholar] [CrossRef]
- Sajad, T.; Mortazavi, S.S.; Niknam, T. Stochastic scheduling of local distribution systems con-sidering high penetration of plug-in electric vehicles and renewable energy sources. Energy 2017, 121, 480–490. [Google Scholar]
- Shafie-Khah, M.; Neyestani, N.; Damavandi, M.; Gil, F.; Catalão, J. Economic and technical aspects of plug-in electric vehicles in electricity markets. Renew. Sustain. Energy Rev. 2016, 53, 1168–1177. [Google Scholar] [CrossRef]
- Mehdi, S.; Salehi, J.; Gazijahani, F.S. Decentralized trading of plug-in electric vehicle ag-gregation agents for optimal energy management of smart renewable penetrated microgrids with the aim of CO2 emission reduction. J. Clean. Prod. 2018, 200, 622–640. [Google Scholar]
- Sousa, T.; Vale, Z.; Carvalho, J.P.; Pinto, T.; Morais, H. A hybrid simulated annealing approach to handle energy resource management considering an intensive use of electric vehicles. Energy 2014, 67, 81–96. [Google Scholar] [CrossRef]
- Zakariazadeh, A.; Jadid, S.; Siano, P. Multi-objective scheduling of electric vehicles in smart distribution system. Energy Convers. Manag. 2014, 79, 43–53. [Google Scholar] [CrossRef]
- Miadreza, S.; Siano, P.; Fitiwi, D.Z.; Mahmoudi, N.; Catalao, J.P.S. An innovative two-level model for electric vehicle parking lots in distribution systems with renewable energy. IEEE Trans. Smart Grid 2017, 9, 1506–1520. [Google Scholar]
- Rezaeimozafar, M.; Eskandari, M.; Savkin, A.V. A Self-Optimizing Scheduling Model for Large-Scale EV Fleets in Microgrids. IEEE Trans. Ind. Inform. 2021, 17, 8177–8188. [Google Scholar] [CrossRef]
- Xie, Z.; Nazir, M.S.; Khaksar, M.; Nishihara, K.; Tao, H. A day-ahead economic scheduling of microgrids equipped with plug-in hybrid electric vehicles using modified shuffled frog leaping algorithm. J. Energy Storage 2021, 33, 102021. [Google Scholar]
- Jannati, J.; Nazarpour, D. Optimal performance of electric vehicles parking lot considering environmental issue. J. Clean. Prod. 2018, 206, 1073–1088. [Google Scholar] [CrossRef]
- Chung, H.-M.; Li, W.-T.; Yuen, C.; Wen, C.-K.; Crespi, N. Electric Vehicle Charge Scheduling Mechanism to Maximize Cost Efficiency and User Convenience. IEEE Trans. Smart Grid 2018, 10, 3020–3030. [Google Scholar] [CrossRef] [Green Version]
- Alipour, M.; Mohammadi-Ivatloo, B.; Moradi-Dalvand, M.; Zare, K. Stochastic scheduling of aggregators of plug-in electric vehicles for participation in energy and ancillary service markets. Energy 2017, 118, 1168–1179. [Google Scholar] [CrossRef]
- Nezamabad, H.A.; Zand, M.; Alizadeh, A.; Vosoogh, M.; Nojavan, S. Multi-objective optimization based robust scheduling of electric vehicles aggregator. Sustain. Cities Soc. 2019, 47, 101494. [Google Scholar] [CrossRef]
- Mehran, M.; Abdollahi, A.; Rashidinejad, M. Possibilistic-probabilistic self-scheduling of PEVAg-gregator for participation in spinning reserve market considering uncertain DRPs. Energy 2020, 196, 117108. [Google Scholar]
- Faddel, S.; Al-Awami, A.T.; Abido, M. Fuzzy Optimization for the Operation of Electric Vehicle Parking Lots. Electr. Power Syst. Res. 2017, 145, 166–174. [Google Scholar] [CrossRef]
- Moghaddam, S.Z.; Akbari, T. Network-constrained optimal bidding strategy of a plug-in electric vehicle aggregator: A stochastic/robust game theoretic approach. Energy 2018, 151, 478–489. [Google Scholar] [CrossRef]
- Sharma, A.; Shih, S.; Srinivasan, D. A smart scheduling strategy for charging and discharging of electric vehicles. In Proceedings of the 2015 IEEE Innovative Smart Grid Technologies-Asia (ISGT ASIA), Bangkok, Thailand, 3–6 November 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Mahyar, A.; Rezaei, O.; Kazemi, A.; Bagheri, S. An Optimal Management for Charging and Discharging of Electric Vehicles in an Intelligent Parking Lot Considering Vehicle Owner’s Random Behaviors. J. Energy Storage 2021, 35, 102245. [Google Scholar]
- Tookanlou, M.B.; Kani, S.A.P.; Marzband, M. A comprehensive day-ahead scheduling strategy for electric vehicles operation. Int. J. Electr. Power Energy Syst. 2021, 131, 106912. [Google Scholar] [CrossRef]
- Liu, W.; Chen, S.; Hou, Y.; Yang, Z. Optimal Reserve Management of Electric Vehicle Aggregator: Discrete Bilevel Optimization Model and Exact Algorithm. IEEE Trans. Smart Grid 2021, 12, 4003–4015. [Google Scholar] [CrossRef]
- Yang, Z.; Guo, T.; You, P.; Hou, Y.; Qin, S.J. Distributed Approach for Temporal–Spatial Charging Coordination of Plug-in Electric Taxi Fleet. IEEE Trans. Ind. Inform. 2018, 15, 3185–3195. [Google Scholar] [CrossRef]
- Moghaddam, Z.; Ahmad, I.; Habibi, D.; Phung, Q.V. Smart Charging Strategy for Electric Vehicle Charging Stations. IEEE Trans. Transp. Electrif. 2017, 4, 76–88. [Google Scholar] [CrossRef]
- Bañol, A.N.; Hashemi, S.; Andersen, P.B.; Træholt, C.; Romero, R. Assessment of economic benefits for EV owners participating in the primary frequency regulation markets. Int. J. Electr. Power Energy Syst. 2020, 120, 105985. [Google Scholar] [CrossRef]
- Triviño-Cabrera, A.; Aguado, J.A.; de la Torre, S. Joint routing and scheduling for electric vehicles in smart grids with V2G. Energy 2019, 175, 113–122. [Google Scholar] [CrossRef]
- Nimalsiri, N.I.; Ratnam, E.L.; Mediwaththe, C.P.; Smith, D.B.; Halgamuge, S.K. Coordinated charging and discharging control of electric vehicles to manage supply voltages in distribution networks: Assessing the customer benefit. Appl. Energy 2021, 291, 116857. [Google Scholar] [CrossRef]
- Li, J.; Yang, B. Analysis of greenhouse gas emissions from electric vehicle considering electric energy structure, climate and power economy of ev: A China case. Atmos. Pollut. Res. 2020, 11, 1–11. [Google Scholar] [CrossRef]
- Calvillo, C.F.; Czechowski, K.; Söder, L.; Sanchez-Miralles, A.; Villar, J. Vehicle-to-grid profitability considering EV battery degradation. In Proceedings of the 2016 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Xi’an, China, 25–28 October 2016; pp. 310–314. [Google Scholar]
- Ali, A.; Sedghi, M.; Elkamel, A.; Fowler, M.; Golkar, M.A. Plug-in electric vehicle batteries degradation modeling for smart grid studies: Review, assessment and conceptual framework. Renew. Sustain. Energy Rev. 2018, 81, 2609–2624. [Google Scholar]
- Crawford, A.J.; Huang, Q.; Kintner-Meyer, M.C.; Zhang, J.-G.; Reed, D.M.; Sprenkle, V.L.; Viswanathan, V.V.; Choi, D. Lifecycle comparison of selected Li-ion battery chemistries under grid and electric vehicle duty cycle combinations. J. Power Sources 2018, 380, 185–193. [Google Scholar] [CrossRef]
- Dai, W.; Coignard, J.; Zeng, T.; Zhang, C.; Saxena, S. Quantifying electric vehicle battery degrada-tion from driving vs. vehicle-to-grid services. J. Power Sources 2016, 332, 193–203. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Charging Method | Control Structures | Optimization Goals | Mathematical Modeling | Battery Degradation | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Eco | Env | GOI | |||||||||||||||
| CC | IC | BS | C | D | H | EVO | EVA | DSO | AP | RP | REI | OF | Con | SM | |||
| [13] | - | - | - | ✓ | ✓ | - | - | - | - | - | ✓ | ✓ | ✓ | ✓ | - | ✓ | ✓ |
| [14] | ✓ | - | - | ✓ | ✓ | - | ✓ | ✓ | - | ✓ | ✓ | - | - | ✓ | ✓ | ✓ | ✓ |
| [15] | ✓ | - | - | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | - | ✓ | ✓ | - | ✓ | - | ✓ | ✓ |
| [16] | ✓ | - | - | ✓ | ✓ | - | ✓ | - | ✓ | ✓ | ✓ | ✓ | ✓ | - | - | - | ✓ |
| [17] | - | - | - | - | - | - | ✓ | - | ✓ | ✓ | ✓ | - | ✓ | - | - | - | ✓ |
| [18] | ✓ | - | - | - | - | - | - | - | - | ✓ | ✓ | - | ✓ | - | - | - | ✓ |
| [19] | ✓ | - | ✓ | - | - | - | ✓ | ✓ | ✓ | - | ✓ | ✓ | ✓ | - | - | ✓ | ✓ |
| [20] | ✓ | - | - | ✓ | ✓ | - | ✓ | - | - | - | ✓ | ✓ | ✓ | - | - | ✓ | ✓ |
| [21] | ✓ | - | ✓ | - | - | - | ✓ | - | ✓ | ✓ | ✓ | ✓ | ✓ | - | - | - | ✓ |
| [22] | ✓ | - | - | - | - | - | ✓ | - | ✓ | ✓ | ✓ | ✓ | ✓ | - | - | - | ✓ |
| [23] | ✓ | ✓ | ✓ | - | - | - | ✓ | - | ✓ | ✓ | ✓ | - | ✓ | - | - | - | - |
| [24] | - | - | - | - | - | - | ✓ | ✓ | ✓ | ✓ | ✓ | - | - | - | ✓ | ✓ | ✓ |
| [25] | - | - | - | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | - | ✓ | - | - | ✓ | - |
| [26] | - | - | - | - | - | - | ✓ | - | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| [29] | ✓ | ✓ | ✓ | - | - | - | - | - | - | ✓ | ✓ | - | - | - | - | - | ✓ |
| [32] | - | - | - | ✓ | ✓ | ✓ | ✓ | - | ✓ | - | ✓ | ✓ | - | - | - | ✓ | - |
| This paper | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | - | ✓ | ✓ |
| Different Power Levels | Charger Location | Typical Implementation Place | The Expected Power Level (KW) |
|---|---|---|---|
| Level 1: Convenient Vac: 230 (EU) Vac: 120 (US) | 1 phase on-board | Office and Home | Power: 1.4 (12A) Power: 1.9 (20A) |
| Level 2: Main Vac: 400 (EU) Vac: 240 (US) | 1 phase/3 phase on-board | Public and Private | Power: 4 (17A) Power: 8 (32A) Power: 19.2 (80A) |
| Level 3: Fast Vac: 208–600 | 3 phase off-board | Commercial | Power: 50 Power: 100 |
| DC Power Level 1: Vdc: 200–450 | Off-board | Private | Power: 40 (80A) |
| DC Power Level 2: Vdc: 200–450 | Off-board | Private | Power: 90 (200A) |
| DC Power Level 3: Vdc: 200–600 | Off-board | Private | Power: 240 (400A) |
| Feature | Conductive Charging | Inductive Charging | Battery Swapping | |
|---|---|---|---|---|
| Static | Dynamic | |||
| Charging duration | Depending on power levels but relatively high | High | Does not matter due to charging in motion | Very low |
| Charging efficiency | High | Lower than CC and BS | Lower than CC and BS | High |
| Infrastructure required | Depending on charging power levels but relatively low | High | Very high | Very high |
| Required battery size | High | High | Lower than the other methods | High |
| Range anxiety | Depending on the state of charge of the battery | Depending on the state of charge of the battery | Lower than the other methods due to charging in motion | Depending on the state of charge of the battery |
| Battery ownership | EV’s owner owns the battery | EV’s owner owns the battery | EV’s owner owns the battery | Either the EV’s owner or the charging station owns the battery |
| Risk of electric shock | possible | Safer than CC and BS | Safer than CC and BS | possible |
| Feature | Centralized | Decentralized | Hierarchical |
|---|---|---|---|
| Achieving the optimal solution | Global | Local | Depending on the control structure |
| Computational complexity | High | Low | Almost low |
| Required communication infrastructure | Low | High | Depending on the control structure but almost low |
| User charging authority | Low | High | Depending on the control structure |
| Scalability | Low | High | High |
| Objective | Reference | |
|---|---|---|
| Frequency regulation | [4,60,61,62,63,66,72,73,74,75,76,77,78,79] | |
| Minimization of load fluctuations | [6,45,54,71,80,81,82,83,84,85,86,87,88,89,90] | |
| Active power support | Peak shaving and valley filling | [7,43,48,51,91,92,93,94,95,96] |
| Voltage regulation with active power management | [46,47,65,71,84,97,98,99,100,101] | |
| Minimization of losses by managing active power | [44,46,47,50,83,87,91,97,98,102,103,104,105,106] | |
| Reactive power support | Voltage regulation with reactive power management | [5,8,45,75,101,103,104,107,108,109,110] |
| Minimization of losses by managing reactive power | [8,64,103,104,106,107,111] | |
| Support for solar sources | [5,99,112,113,114,115,116] | |
| Integration of renewable energy sources | Support for wind sources | [73,102,117,118,119,120] |
| Support for solar and wind resources | [9,67,121,122] |
| The Perspective of the Actor | Reference |
|---|---|
| From the point of view of the distribution system’s operator | [53,57,58,59,68,83,101,103,104,105,106,114,120,121,122,124,125,126,127,128,129] |
| From the aggregator’s point of view | [8,63,69,75,77,92,96,130,131,132,133,134,135,136,137,138,139,140] |
| From the EV owner’s point of view | [4,9,44,46,47,48,49,50,61,71,75,76,85,86,87,102,110,118,119,137,138,139,140,141,142,143,144,145] |
| Reference | Main Objectives | Control Structure | Power Transfer Model (G2V or V2G or Both) | Optimization Model/Method |
|---|---|---|---|---|
| [4] | Secondary frequency regulation, maximizing charging station efficiency, reducing EV owner costs | Centralized | G2V | GA |
| [8] | Minimizing EV charging costs from an aggregator point of view, minimizing losses, reactive power compensation | Hierarchical | G2V | NLP |
| [44] | Peak shaving, loss minimization, EV owner cost minimization | Centralized | Both | IEMA |
| [47] | Minimizing the voltage imbalance coefficient, minimizing neutral current, minimizing bus voltage deviation, minimizing losses | Centralized | Both | DE |
| [48] | Minimization of the EV owner’s battery charge cost, peak shaving | Decentralized | G2V | Game theory |
| [49] | Minimization of the EV owner’s battery charge cost | Decentralized | G2V | QP/Game theory |
| [53] | Minimizing the overall cost from the system operator point of view considering benefits to EV aggregators | Decentralized | Both | MIQP/CPLEX solver |
| [61] | Secondary frequency control, reducing battery degradation, maximization of the EV owner’s profit | Hierarchical | Both | MILP/Mosek solver |
| [64] | Minimizing the cost of charging EVs from the aggregator’s viewpoint, minimization of network losses | Centralized | Both | GA and DE |
| [65] | Minimizing the voltage imbalance coefficient | Centralized | Both | PSO |
| [68] | Minimizing network operation costs | Centralized | Both | MIQP/Gurobi solver |
| [69] | Maximizing the EV aggregator’s profit | Centralized | Both | MIP |
| [75] | Decreasing the cost of charging the battery of the EV through participation in frequency regulation, increasing the aggregator’s profit through participation in network voltage regulation, decreasing battery degradation | Centralized | Both | NLP |
| [80] | Minimization of the load variance | Centralized | Both | GA |
| [85] | Minimization of the load variance, maximizing the benefit to the EV owner | Centralized | Both | GA |
| [97] | Minimizing losses and voltage deviations | Centralized | G2V | PSO |
| [101] | Improving the voltage profile, minimizing the cost from the distribution system operator’s viewpoint | Centralized | Both | MILP/CPLEX solver |
| [104] | Minimizing the cost of energy losses and operating costs of transformers, improving the voltage profile and power factor | Centralized | Both | NLP/interior point method |
| [110] | Minimizing the EV charging cost through reactive power compensation | Centralized | G2V | LP |
| [115] | Minimizing the EV aggregator’s cost, supporting solar resources | Centralized | Both | MIP |
| [119] | Supporting wind power as a renewable energy source, minimizing the EV owner’s charging cost, and decreasing battery degradation | Centralized | Both | MIQP |
| [126] | Minimizing the network operation cost, minimizing greenhouse gas emissions | Centralized | Both | MILP and NLP |
| [133] | Maximizing the average and deviation in the profit of the EV aggregator | Centralized | Both | MILP/CPLEX solver |
| [135] | Maximizing the profit of the parking operator (i.e., the EV aggregator) | Centralized | G2V | Fuzzy optimization |
| [138] | Maximizing the profit of the parking operator, minimizing the EV owner’s charging cost | Centralized | Both | PSO |
| [144] | Maximizing the EV owner’s benefit | Centralized | Both | MILP |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aghajan-Eshkevari, S.; Azad, S.; Nazari-Heris, M.; Ameli, M.T.; Asadi, S. Charging and Discharging of Electric Vehicles in Power Systems: An Updated and Detailed Review of Methods, Control Structures, Objectives, and Optimization Methodologies. Sustainability 2022, 14, 2137. https://0-doi-org.brum.beds.ac.uk/10.3390/su14042137
Aghajan-Eshkevari S, Azad S, Nazari-Heris M, Ameli MT, Asadi S. Charging and Discharging of Electric Vehicles in Power Systems: An Updated and Detailed Review of Methods, Control Structures, Objectives, and Optimization Methodologies. Sustainability. 2022; 14(4):2137. https://0-doi-org.brum.beds.ac.uk/10.3390/su14042137
Chicago/Turabian StyleAghajan-Eshkevari, Saleh, Sasan Azad, Morteza Nazari-Heris, Mohammad Taghi Ameli, and Somayeh Asadi. 2022. "Charging and Discharging of Electric Vehicles in Power Systems: An Updated and Detailed Review of Methods, Control Structures, Objectives, and Optimization Methodologies" Sustainability 14, no. 4: 2137. https://0-doi-org.brum.beds.ac.uk/10.3390/su14042137