
Digital Twin-Based Intelligent Safety Risks Prediction of Prefabricated Construction Hoisting


Abstract
:1. Introduction
2. Background and Concepts
2.1. Safety Risk of Prefabricated Building Hoisting
2.2. Digital Twin and Machine Learning
2.2.1. Digital Twin
2.2.2. Potential of Machine Learning for Digital Twin in Construction
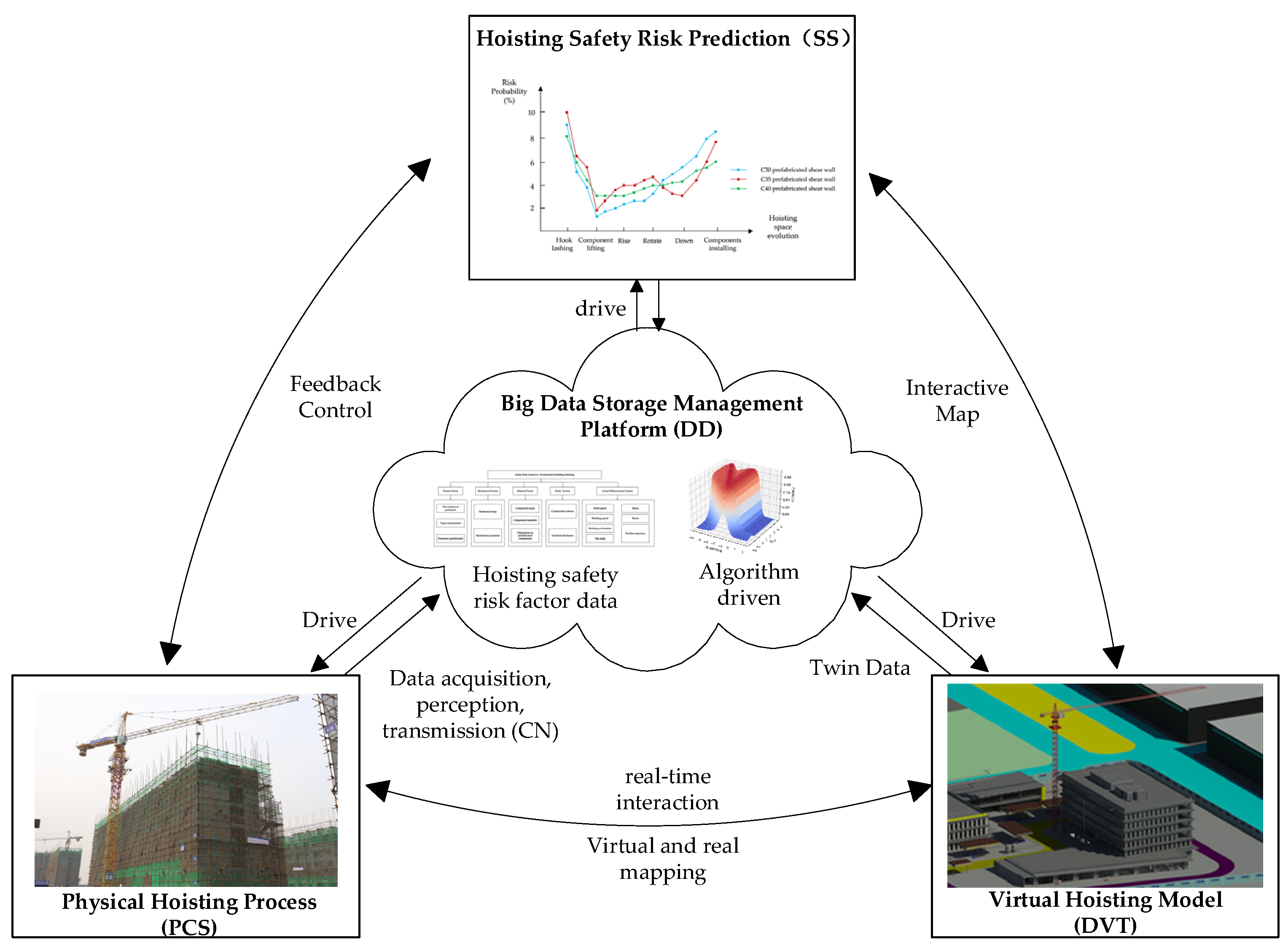
3. Digital Twin-Based Prefabricated Building Hoisting Risk Prediction Framework
4. Safety Risk Prediction Method for Hoisting Process Based on Digital Twin
4.1. Prefabricated Component Hoisting Safety Risk Identification
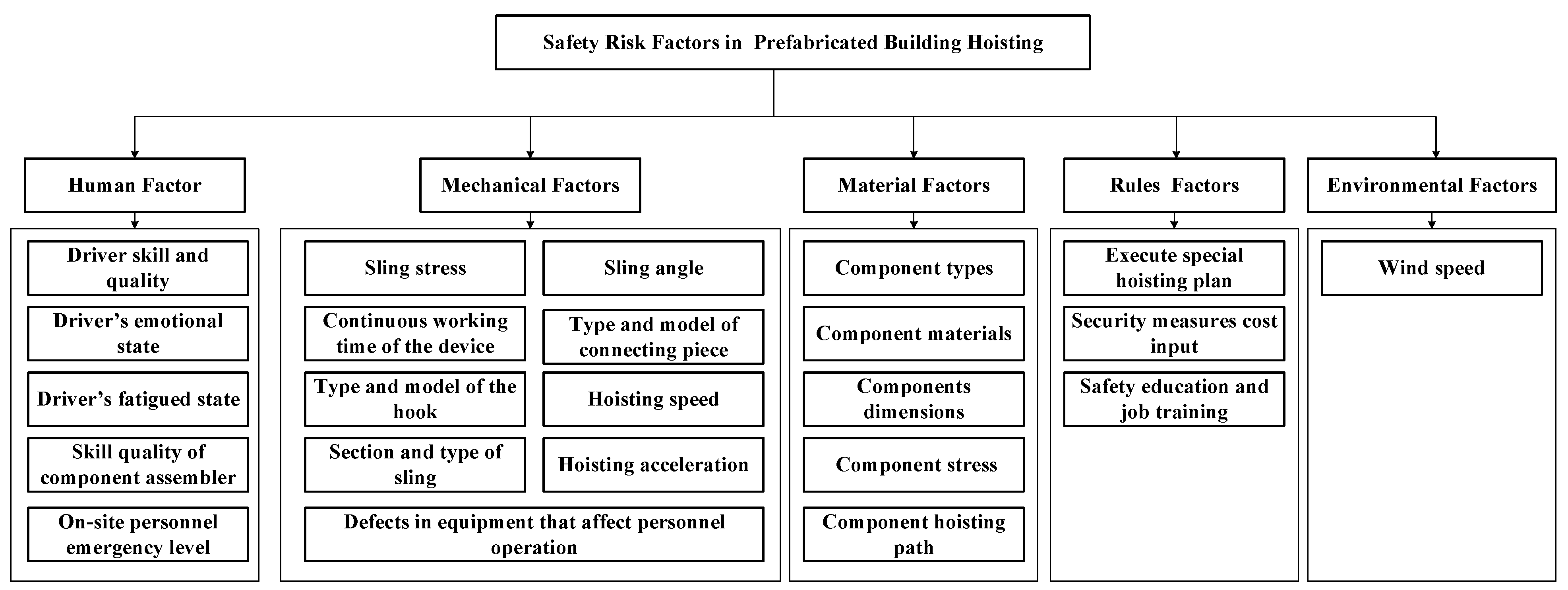
4.1.1. WBS-RBS Decomposition of Prefabrication Hoisting Safety Risk Factors
- WBS Decomposition
- RBS Decomposition
4.1.2. WBS-RBS Analysis of Prefabrication Hoisting Safety Risk Factors
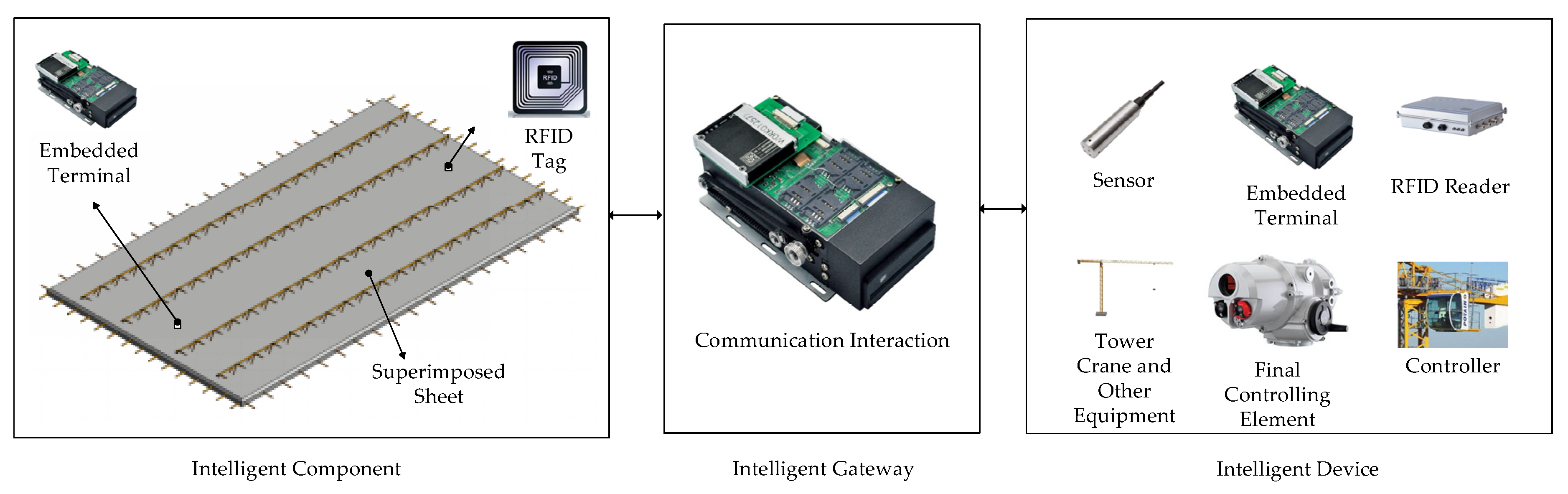
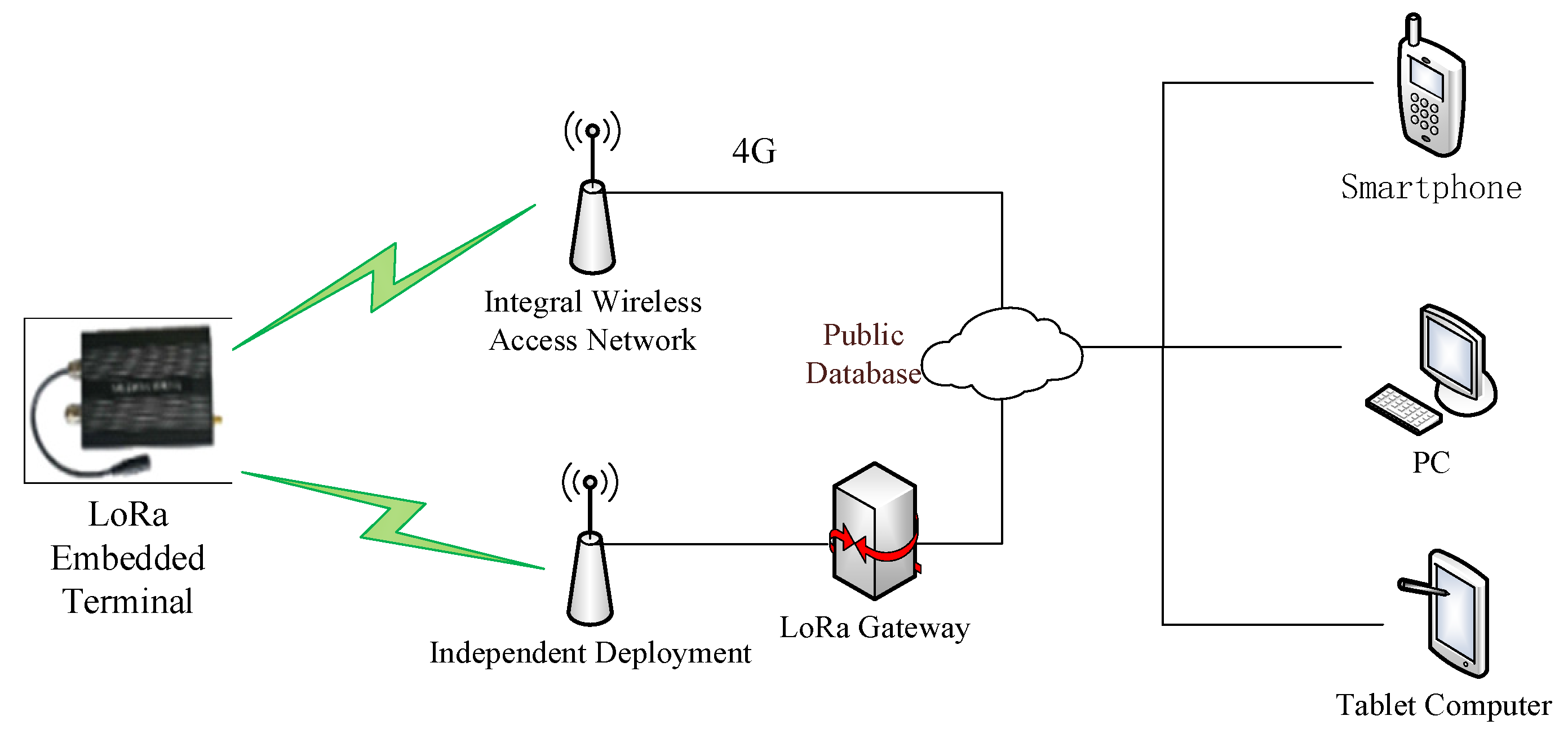
4.2. Collection and Transmission of Hoisting Information
- Intelligent component configuration (ICC)
- Intelligent device configuration (IDC)
- Intelligent gateway configuration (IGC)
- Identification and storage structure of prefabricated component information
4.3. Hoisting Risk Prediction Based on Multi-Source Heterogeneous Data
4.3.1. DT-SVM Algorithm Based on Digital Twin Multi-Source Heterogeneous Data
- Normalization of sample data;
- 2.
- Conversion of multi-source isomorphic data to uniform sample data
- 3.
- Generation of decision function.
- 4.
- Evaluation of prediction effect.
4.3.2. Hoisting Safety Risk Prediction Process Based on DT-SVM
- Normalization of sample data. The sample data are derived from the Digital Twin model in the hoisting process. Data types include numeric and logical data. The logical data needs to be converted into numerical data. The dimension difference of the influence factor will lead to the significant difference of the value. Therefore, normalization is needed, and deviation standardization is the most commonly used method.
- Selection of training set and test set. To prevent overfitting, at least 80% of the sample data are used for model training. The rest of the sample data are used for testing, and the sample data need to be randomly scrambled. DT-SVM prediction requires that the corresponding classification label should be set for the risk level. Since categorical labels do not affect DT-SVM classification performance, they can be set by themselves.
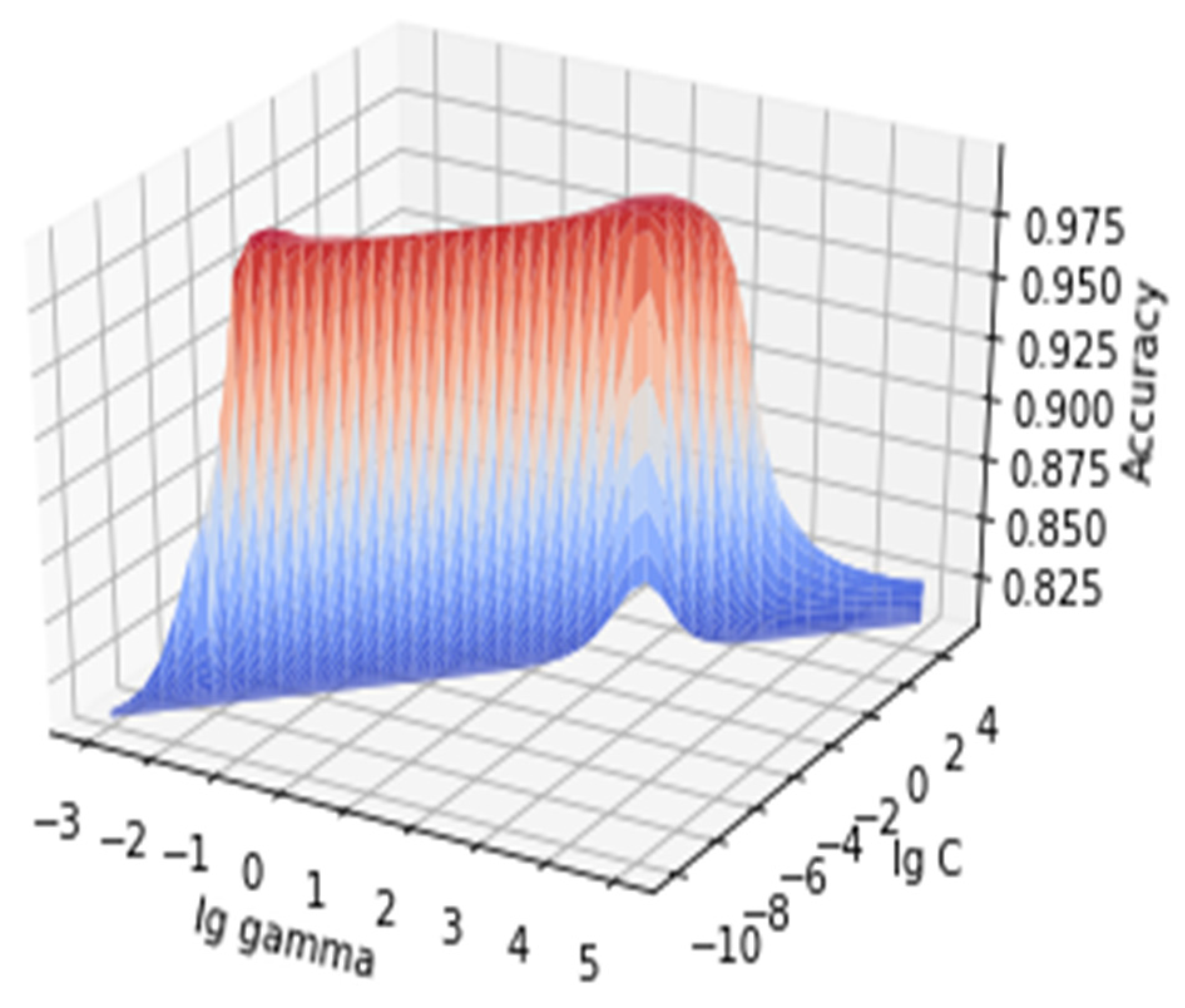
- Model training. The key to data training is to choose the proper kernel function and parameters. The radial basis kernel function (RBF) is superior to other kernel functions in both accuracy and computational performance. The penalty coefficient and kernel parameter are usually determined by -fold cross-validation.
- Evaluation of testing and effectiveness. The test is a calculation of a selected set of tests. The safety risk level was obtained through the prediction model, and the correlation coefficient was calculated by comparing it with the actual risk level. The closer the value is to 1, the more accurate the prediction result is. If the value of indicates a low accuracy, the above steps 3. and 4. should be repeated.
- Analysis of space-time evolution. After the prediction model is established, the collected and sorted data are successively imported into the prediction model. After calculation, the risk states of different periods and positions in the hoisting process are obtained. According to the state of each risk indicator predicted by DT-SVM model, the probability of each indicator is calculated. A working condition is formed by combining the indicators at a certain moment in turn. The working condition with a probability of more than 70% is set as a dangerous working condition. The ratio of dangerous working conditions to all working conditions is the risk probability at this moment. The temporal and spatial evolution of risk was analyzed according to risk probability.
4.4. Construction and Operation of Virtual Model of Hoisting Process
- Processed BIM model. Firstly, build the lightweight model. The BIM model is generated into an IFC format file, which is parsed and read under the JavaScript environment. Then use WebGL technology to carry the BIM model on the web page.
- Link the information to the database. By carrying the original information of sensors in the public database into the BIM model, the location of sensors and the collected real-time data can be viewed on the webpage. At the same time, the virtual model can simulate the physical construction hoisting site according to the information of the positioning sensor. This simulation has a corresponding relationship in time and space, and is able to transform the traditional 3D BIM model into a 4D model based on time dimension under the Digital Twin.
- Feedback control. When there is a safety risk in the forecast result of hoisting, the system will issue an alert. There are two ways to alert. One way is to highlight the time node and risk position of the risk on the web page. The other part is to link the alarm device through the LoRa system and carry out flash sounds at the corresponding place on the construction site. At the same time, the hoisting risk diagnosis report is transmitted to the operator in real-time through APP.
5. Case Study
5.1. Project Background
5.2. Hoisting Data Acquisition and Transmission
5.3. Hoisting Safety Risk Prediction and Analysis Based on Multi-Source Heterogeneous Data
5.3.1. Hoisting Safety Risk Prediction Based on DT-SVM Algorithm
- Normalization of sample data;
- 2.
- Establishment and optimization of safety risk prediction model;
5.3.2. Analysis on the Spatial-Temporal Evolution of Hoisting Safety Risk
5.4. Virtual Model Construction and Running
6. Conclusions and Future Works
- This framework provides an efficient data interaction method, which can map multi-dimensional information on site to virtual model in time. Meanwhile, the framework can quickly feedback the simulation and calculation results of virtual space to managers and operators, and improve the level of safety management.
- In this method, a DT-SVM algorithm which can interact with the Digital Twin framework is proposed. DT-SVM algorithm can process multi-source heterogeneous data to form unified sample data. It makes up for the shortage of the traditional SVM method in small sample data processing and provides a method for the fusion of prediction algorithm and information framework.
- The framework applies Digital Twin to the safety risk prediction of prefabricated component hoisting, which effectively solves the defects of high hoisting risk, difficult prediction and low intelligence degree. This method also has vigorous application prospect in other construction process safety risk prediction.
- The data in this paper are expanded by simulation on the basis of field data. Only to verify the feasibility of the framework, the space-time evolution law obtained is not applicable to all projects.
- In the selection of characteristic variables, quantitative methods can also be used.
- The existing methods have shortcomings in the aspect of automatic control. The risk problem also depends on the manual processing, which has not formed the automatic control mode. In the next step, the control method can be studied to improve the level of Digital Twin and carry it out in a manner with more “self-control”.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Htt, A.; Tn, A.; Bu, B. A review on modular construction for high-rise buildings. Structures 2020, 28, 1265–1290. [Google Scholar] [CrossRef]
- Zhou, Z.P.; Goh, M.Y.; Li, Q. Overview and analysis of safety management studies in the construction industry. Saf. Sci. 2015, 72, 337–350. [Google Scholar] [CrossRef]
- Abedini, M.; Zhang, C. Blast Performance of Concrete Columns Retrofitted with FRP using Segment Pressure Technique. Compos. Struct. 2020, 260, 113473. [Google Scholar] [CrossRef]
- Sun, L.; Yang, Z.; Jin, Q.; Yan, W. Effect of Axial Compression Ratio on Seismic Behavior of GFRP Reinforced Concrete Columns. Int. J. Struct. Stab. Dyn. 2020, 20, 4–20. [Google Scholar] [CrossRef]
- Zheng, J.; Zhang, C.; Li, A. Experimental Investigation on the Mechanical Properties of Curved Metallic Plate Dampers. Appl. Sci. 2019, 10, 269. [Google Scholar] [CrossRef] [Green Version]
- Wen, Z.; Liu, T.; Zhou, W.; Tang, J. Safety risk factors of metro tunnel construction in China: An integrated study with EFA and SEM. Saf. Sci. 2018, 105, 98–113. [Google Scholar] [CrossRef]
- Raviv, G.; Shapira, A.; Fishbain, B. AHP-based analysis of the risk potential of safety incidents: Case study of cranes in the construction industry. Saf. Sci. 2017, 91, 298–309. [Google Scholar] [CrossRef]
- Choe, S.L.F. Assessing safety risk among different construction trades: Quantitative approach. J. Constr. Eng. Manag. 2017, 143, 1–11. [Google Scholar] [CrossRef]
- Thanasis, K.; Panagiotis, S.; Dimosthenis, I.; Dimitrios, T. Machine learning and deep learning in smart manufacturing: The smart grid paradigm. Comput. Sci. Rev. 2020, 40, 100341. [Google Scholar] [CrossRef]
- Abedini, M.; Zhang, C. Dynamic vulnerability assessment and damage prediction of RC columns subjected to severe impulsive loading. Struct. Eng. Mech. 2021, 77, 441–461. [Google Scholar] [CrossRef]
- Zhang, C.; Gholipour, G.; Mousavi, A.A. State-of-the-Art Review on Responses of RC Structures Subjected to Lateral Impact Loads. Arch. Comput. Methods Eng. 2020, 8, 2477–2507. [Google Scholar] [CrossRef]
- Liu, M.; Li, Y.; Wang, F.; Chen, X.; Li, R.; Li, X. An RVM based safety early warning model for hoisting operation in fabricated building project. China Saf. Sci. J. 2018, 28, 109–114. [Google Scholar] [CrossRef]
- Liu, H.; He, Y.; Hu, Q.; Guo, J.; Luo, L. Risk management system and intelligent decision-making for prefabricated building project under deep learning modified teaching-learning-based optimization. PLoS ONE 2020, 15, e0235980. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.S.; Bai, W.Y.; Du, X.L.; Zhang, A.S.; Xing, Z.Z.; Jiang, A.T.; Jin, J. Digital Twin-based Safety Evaluation of Prestressed Steel Structure. Adv. Civ. Eng. 2020, 20, 8888876. [Google Scholar] [CrossRef]
- Lu, Q.; Parlikad, A.K.; Woodall, P.; Xie, X.; Schooling, J.M. Developing a dynamic Digital Twin at building and city levels: A case study of the West Cambridge campus. J. Manag. Eng. 2020, 36, 05020004. [Google Scholar] [CrossRef]
- Tao, F.; Cheng, J.; Qi, Q. Digital Twin-driven Product Design, Manufacturing and Service with Big Data. Int. J. Adv. Manuf. Technol. 2018, 94, 3563–3576. [Google Scholar] [CrossRef]
- Lu, Y.; Liu, C.; Wang, I.K.; Huang, H.; Xu, X. Digital Twin-driven smart manufacturing: Connotation, reference model, applications and research issues. Robot. Comput. Integr. Manuf. 2020, 61, 101837. [Google Scholar] [CrossRef]
- Liu, J.; Yi, Y.; Wang, X. Exploring factors influencing construction waste reduction: A structural equation modeling approach. J. Clean. Prod. 2020, 276, 123185. [Google Scholar] [CrossRef]
- Liu, Z.S.; Zhang, A.S.; Wang, W.S.; Wang, J.J. Digital Twin-driven Dynamic Evacuation Method for Winter Olympic Stadium Fire Safety. J. Tongji Univ. 2020, 48, 962–971. [Google Scholar] [CrossRef]
- Liu, C.; Wang, F.; He, L.; Deng, X.; Liu, J.; Wu, Y.Y. Experimental and numerical investigation on dynamic responses of the umbrella membrane structure excited by heavy rainfall. J. Vib. Control. 2020, 27, 675–684. [Google Scholar] [CrossRef]
- Liu, C.; Wang, F.; Deng, X.; Pang, S.; Liu, J.; Wu, Y.; Xu, Z. Hailstone-induced dynamic responses of pretensioned umbrella membrane structure. Adv. Struct. Eng. 2021, 24, 3–16. [Google Scholar] [CrossRef]
- Hou, L.; Wu, S.; Zhang, G.K.; Tan, Y.; Wang, X. Literature Review of Digital Twins Applications in Construction Workforce Safety. Appl. Sci. 2020, 11, 339. [Google Scholar] [CrossRef]
- Zhu, J.; Wu, P.; Chen, M.; Mi, J.K.; Fang, T. Automatically processing IFC clipping representation for BIM and GIS integration at the process level. Appl. Sci. 2020, 10, 2009. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Xing, Z.; Huang, C.; Du, X. Digital Twin modeling method for construction process of assembled building. J. Build. Struct. 2021, 42, 213–222. [Google Scholar] [CrossRef]
- Abedini, M.; Zhang, C.; Mehrmashhadi, J.; Akhlaghi, E. Comparison of ALE, LBE and pressure time history methods to evaluate extreme loading effects in RC column. Structures 2020, 28, 456–466. [Google Scholar] [CrossRef]
- Gholipour, G.; Zhang, C.; Mousavi, A.A. Numerical analysis of axially loaded RC columns subjected to the combination of impact and blast loads. Eng. Struct. 2020, 219, 110924. [Google Scholar] [CrossRef]
- Roman, W.; Jan, G.; Piotr, S.; Smardz, A.; Andrzej, K. Fire and collapse modelling of a precast concrete hall. Struct. Infrastruct. Eng. Maint. Manag. Life-Cycle Des. Perform. 2016, 12, 714–729. [Google Scholar] [CrossRef]
- Liu, Z.S.; Han, Z.B.; Zhang, Y.; Xu, R. Numerical SimulationI of Prefabricated Wind Power Tower Based on BIM Technology. Archit. Technol. 2017, 48, 1131–1134. [Google Scholar] [CrossRef]
- Baniassadi, F.A.A.; Mostafavi, A. A simulation-based framework for concurrent safety and productivity improvement in construction projects. Eng. Constr. Archit. Manag. 2018, 25, 1501–1515. [Google Scholar] [CrossRef]
- Rajguru, A.; Mahatme, P. Effective techniques in cost optimization of construction project: A review. Int. J. Technol. Manag. 2015, 4, 464–469. [Google Scholar]
- Zhang, S.; Shang, C.; Wang, C.; Song, R.; Wang, X. Real-time safety risk identification model during metro construction adjacent to buildings. J. Constr. Eng. Manag. 2019, 145, 04019034. [Google Scholar] [CrossRef]
- Zhong, R.Y.; Peng, Y.; Xue, F.; Fang, J.; Zou, W.; Luo, H.; Ng, S.T.; Lu, W.; Shen, G.Q.P.; Huang, G.Q. Prefabricated construction enabled by the Internet-of-Things. Autom. Constr. 2017, 76, 59–70. [Google Scholar] [CrossRef]
- Gunduz, M.; Laitinen, H. Construction safety risk assessment with introduced control levels. J. Civ. Eng. Manag. 2018, 24, 11–18. [Google Scholar] [CrossRef] [Green Version]
- Lin, J.; Zhang, J.; Zhang, X.; Hu, Z. Automating closed-loop structural safety management for bridge construction through multi-source data integration. Adv. Eng. Softw. 2019, 128, 152–168. [Google Scholar] [CrossRef]
- Tao, F.; Zhang, M.; Liu, Y.; Nee, A.Y.C. Digital Twin driven prognostics and health management for complex equipment. Cirp Ann. 2018, 67, 169–172. [Google Scholar] [CrossRef]
- Chong, H.Y.; Lee, C.Y.; Wang, X. A mixed review of the adoption of Building Information Modelling (BIM) for sustainability. J. Clean. Prod. 2016, 142, 4114–4126. [Google Scholar] [CrossRef] [Green Version]
- Grieves, M.; Vickers, J. Digital Twin: Mitigating Unpredictable, Undesirable Emergent Behavior in Complex Systems. In Transdisciplinary Perspectives on Complex Systems; Kahlen, J., Flumerfelt, S., Alves, A., Eds.; Springer: Cham, Switzerland, 2017; pp. 85–113. [Google Scholar] [CrossRef]
- Glatt, M.; Sinnwell, C.; Yi, L.; Donohoe, S.; Ravani, B.; Aurich, J.C. Modeling and implementation of a Digital Twin of material flows based on physics simulation. J. Manuf. Syst. 2021, 58, 231–245. [Google Scholar] [CrossRef]
- Ding, K.; Zhang, X.; Zhou, G.; Wang, C.; Yang, H.; Zhang, F.; Cao, X. Digital Twin-based multi-dimensional and multi-scale modeling of smart manufacturing spaces. Comput. Integr. Manuf. Syst. 2019, 25, 1491–1504. [Google Scholar] [CrossRef]
- Tao, F.; Liu, W.; Zhang, M.; Hu, T.; Luo, Y. Digital Twin five-dimensional model and its ten major applications. Comput. Integr. Manuf. Syst. 2019, 25, 1–18. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, Z.; Sun, J.; Du, X. Intelligent construction methods and model experiments based on Digital Twins. J. Build. Struct. 2021, 42, 26–36. [Google Scholar] [CrossRef]
- Lee, D.; Lee, S.; Masoud, N.; Krishnan, M.S.; Li, V.C. Integrated Digital Twin and blockchain framework to support accountable information sharing in construction projects. Autom. Constr. 2021, 127, 103688. [Google Scholar] [CrossRef]
- Tsai, Y.H.; Wang, J.; Chien, W.T.; Wei, C.Y.; Wang, X.; Hsieh, S.H. A BIM-based approach for predicting corrosion under insulation. Autom. Constr. 2019, 107, 102923. [Google Scholar] [CrossRef]
- Wuest, T.; Weimer, D.; Irgens, C.; Thoben, K.D. Machine learning in manufacturing: Advantages, challenges, and applications. Prod. Manuf. Res. 2016, 4, 23–45. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.; Hasan, F.; Wang, X.; Lu, M. Construction site accident analysis using text mining and natural language processing techniques. Autom. Constr. 2019, 99, 238–248. [Google Scholar] [CrossRef]
- Ding, L.; Fang, W.; Luo, H.; Love, P.E.D.; Zhong, B.; Ouyang, X. A deep hybrid learning model to detect unsafe behavior: Integrating convolution neural networks and long short-term memory. Autom. Constr. 2018, 86, 118–124. [Google Scholar] [CrossRef]
- Wang, N.; Zhao, X.; Zhao, P.; Zhang, Y.; Ou, J. Automatic damage detection of historic masonry buildings based on mobile deep learning. Autom. Constr. 2019, 103, 53–66. [Google Scholar] [CrossRef]
- Ni, F.T.; Zhang, J.; Chen, Z.Q. Zernike-moment measurement of thin-crack width in images enabled by dual-scale deep learning. Comput. -Aided Civ. Infrastruct. Eng. 2019, 34, 367–384. [Google Scholar] [CrossRef]
- Seong, H.; Choi, H.; Cho, H.; Lee, S.; Kim, C. Vision-Based Safety Vest Detection in a Construction Scene. In Proceedings of the 34th International Symposium on Automation and Robotics in Construction, Taipei, Taiwan, 28 June–1 July 2017; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Tan, G.; Liu, H.; Cheng, Y.; Liu, B.; Zhang, Y. Prediction method for the deformation of deep foundation pit based on neural network algorithm optimized by particle swarm. In Proceedings of the International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE), IEEE, ChangChun, China, 16–18 December 2011; pp. 1407–1410. [Google Scholar]
- Ryu, J.H.; Seo, J.O.; Jebelli, H.S.; Lee, H. Automated Action Recognition Using an Accelerometer-Embedded Wristband-Type Activity Tracker. J. Constr. Eng. Manag. 2019, 145, 04018114. [Google Scholar] [CrossRef]
- Wu, X.; Liu, H.; Zhang, L.; Skibniewski, M.J.; Deng, Q.; Teng, J. A dynamic Bayesian network based approach to safety decision support in tunnel construction. Reliab. Eng. Syst. Saf. 2015, 134, 157–168. [Google Scholar] [CrossRef]
- Zhang, L.; Wu, X.; Skibniewski, M.J.; Zhong, J.; Lu, Y. Bayesian-network-based safety risk analysis in construction projects. Reliab. Eng. Syst. Saf. 2014, 131, 29–39. [Google Scholar] [CrossRef]
- Das, S.K.; Samui, P.; Sabat, A.K. Prediction of field hydraulic conductivity of clay liners using an artificial neural network and support vector machine. Int. J. Geomech. 2011, 12, 606–611. [Google Scholar] [CrossRef]
- Chang, F.; Guo, C.Y.; Lin, X.R.; Lu, C.J. Tree decomposition for large-scale SVM problems. J. Mach. Learn. Res. 2010, 11, 2935–2972. [Google Scholar]
- Zhou, C.; Xu, H.; Ding, L.; Wei, L.; Zhou, Y. Dynamic prediction for attitude and position in shield tunneling: A deep learning method. Autom. Constr. 2019, 105, 102840. [Google Scholar] [CrossRef]
- Zhou, Y.; Su, W.; Ding, L.; Luo, H.; Love, P.E.D. Predicting Safety Risks in Deep Foundation Pits in Subway Infrastructure Projects: Support Vector Machine Approach. J. Comput. Civ. Eng. 2017, 31, 04017052. [Google Scholar] [CrossRef]
- Raviv, G.; Fishbain, B.; Shapira, A. Analyzing risk factors in crane-related near-miss and accident reports. Saf. Sci. 2017, 91, 192–205. [Google Scholar] [CrossRef]
- Maryam, M.F.; Seyyed, A.T.; Charles, J.K.; Hamed, H. Safety concerns related to modular/prefabricated building construction. Int. J. Inj. Control. Saf. Promot. 2017, 24, 10–23. [Google Scholar]
- Li, Y.; Liu, M.; Wang, F.; Li, R. Safety performance assessment of prefabricated building project based on cloud model. China Saf. Sci. J. 2017, 27, 115–120. [Google Scholar] [CrossRef]
- Tian, X.; Hu, Q.; He, Z. Safety Risk Assessment of Hoisting Construction of Prefabricated Buildings Based on Improved Combined Weighting-dynamic Fuzzy Theory. J. Civ. Eng. Manag. 2021, 38, 1–7. [Google Scholar] [CrossRef]
- Zhu, J.; Wang, X.; Wang, P.; Wu, Z.; Kim, M.J. Integration of BIM and GIS: Geometry from IFC to shapefile using open-source technology. Autom. Constr. 2019, 102, 105–119. [Google Scholar] [CrossRef]
- Zhu, J.; Wang, X.; Chen, M.; Wu, P.; Mi, J.K. Integration of BIM and GIS: IFC geometry transformation to shapefile using enhanced open-source approach. Autom. Constr. 2019, 106, 102859. [Google Scholar] [CrossRef]
- Gb50666-2011; Concrete Structure Engineering Construction SPECIFICATION. China Academy of Building Research; China Architecture and Architecture Press: Beijing, China, 2012.
- GB50010-2010; Code for Design of Concrete Structures. China Academy of Building Research; China Architecture and Architecture Press: Beijing, China, 2010.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| W1 | W2 | W3 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| W11 | W12 | W13 | W21 | W22 | W23 | W31 | W32 | W33 | ||
| R1 | R11 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| R12 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| R13 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | |
| R2 | R21 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 |
| R22 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | |
| R3 | R31 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 |
| R32 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | |
| R4 | R41 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| R42 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| R5 | R51 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 |
| Characteristic Variable | Data Type | Maximum Value | Minimum Value | Average Value | Mean Square Error |
|---|---|---|---|---|---|
| Numeric | 59.99 | 30.06 | 44.85 | 8.65 | |
| Numeric | 79.93 | −79.68 | 41.02 | 46.81 | |
| Numeric | 0.045 | −0.045 | 0.02 | 0.03 | |
| Numeric | 4.98 | 2.04 | 3.51 | 0.86 | |
| Logical | 1-four points hoisting, 2-six points hoisting | ||||
| Logical | 1-prefabricated wallboard, 2-composite floor slabs | ||||
| Logical | 1-C30 reinforced concrete; 2-C35 reinforced concrete; 3-C40 reinforced concrete | ||||
| Logical | 1-2750 × 1500 × 200 (wallboard); 2-180 × 3320 × 60 (floor) | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.-S.; Meng, X.-T.; Xing, Z.-Z.; Cao, C.-F.; Jiao, Y.-Y.; Li, A.-X. Digital Twin-Based Intelligent Safety Risks Prediction of Prefabricated Construction Hoisting. Sustainability 2022, 14, 5179. https://0-doi-org.brum.beds.ac.uk/10.3390/su14095179
Liu Z-S, Meng X-T, Xing Z-Z, Cao C-F, Jiao Y-Y, Li A-X. Digital Twin-Based Intelligent Safety Risks Prediction of Prefabricated Construction Hoisting. Sustainability. 2022; 14(9):5179. https://0-doi-org.brum.beds.ac.uk/10.3390/su14095179
Chicago/Turabian StyleLiu, Zhan-Sheng, Xin-Tong Meng, Ze-Zhong Xing, Cun-Fa Cao, Yue-Yue Jiao, and An-Xiu Li. 2022. "Digital Twin-Based Intelligent Safety Risks Prediction of Prefabricated Construction Hoisting" Sustainability 14, no. 9: 5179. https://0-doi-org.brum.beds.ac.uk/10.3390/su14095179