
Cold Starting Temperature Drift Modeling and Compensation of Micro-Accelerometer Based on High-Order Fourier Transform


Abstract
:1. Introduction
2. Analysis of Cold Start-Up Temperature Characteristics for Micro Digital Quartz Flexible Accelerometer
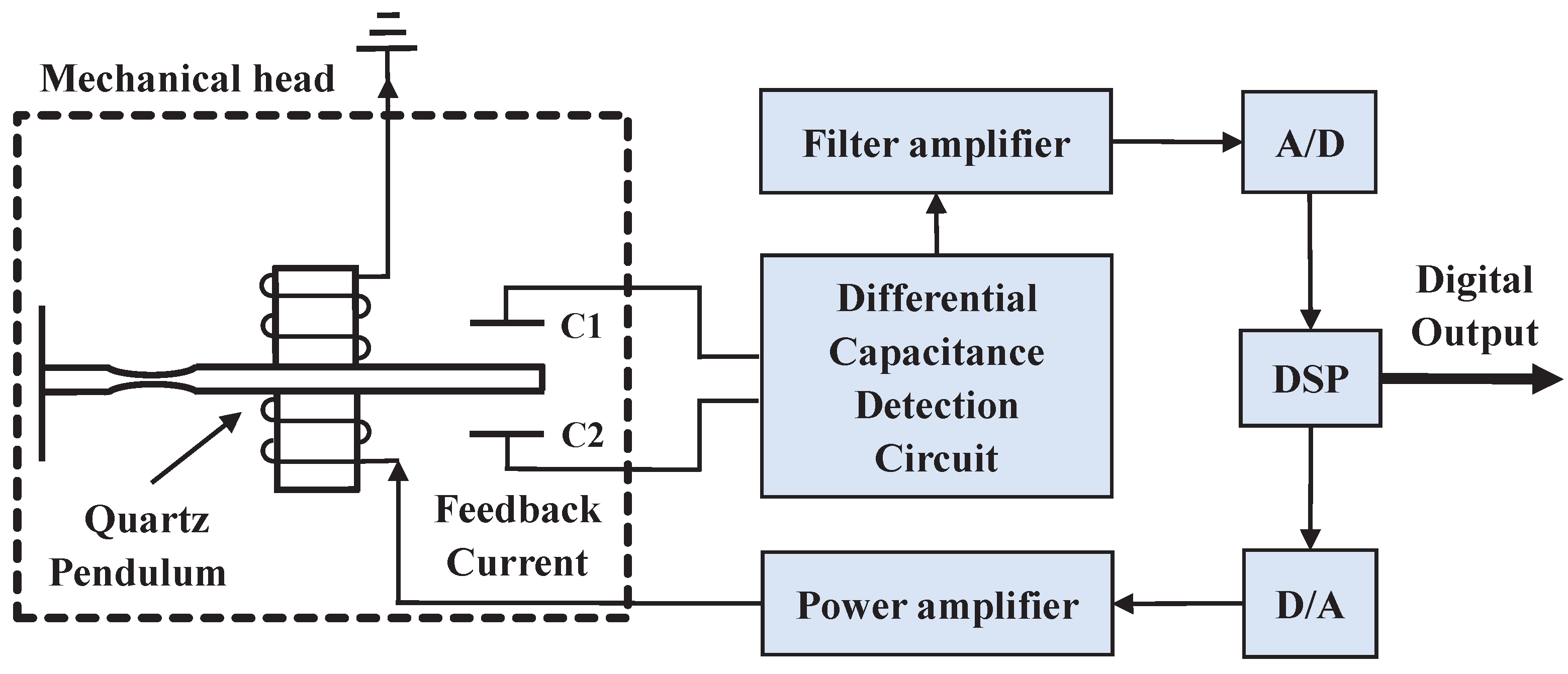
2.1. Basic Model of Digital Quartz Flexible Accelerometer
2.2. The Temperature Characteristic for the Cold Start-Up Phase
- (1)
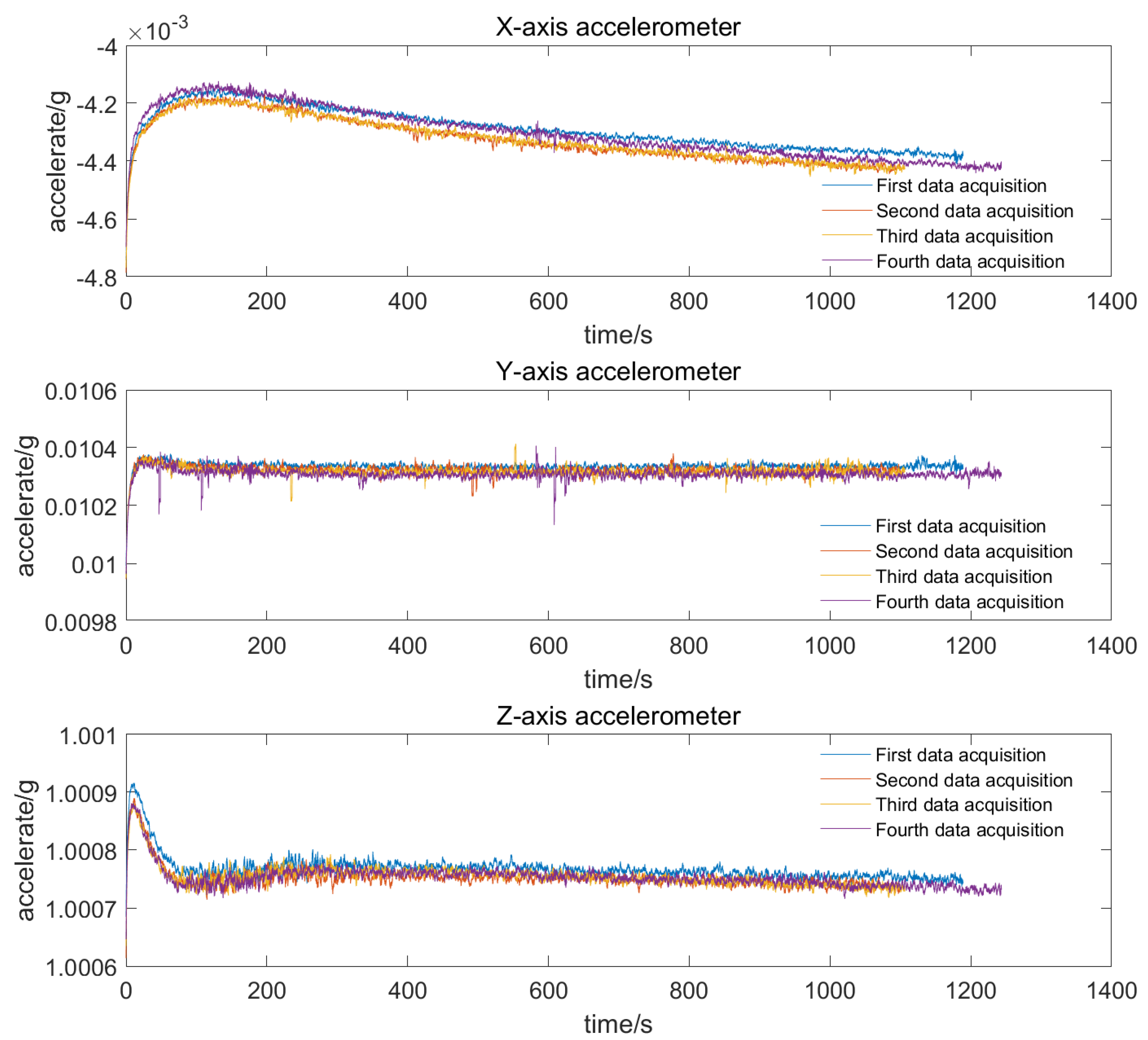
- Different accelerometers display various characteristics for the cold start-up phase;
- (2)
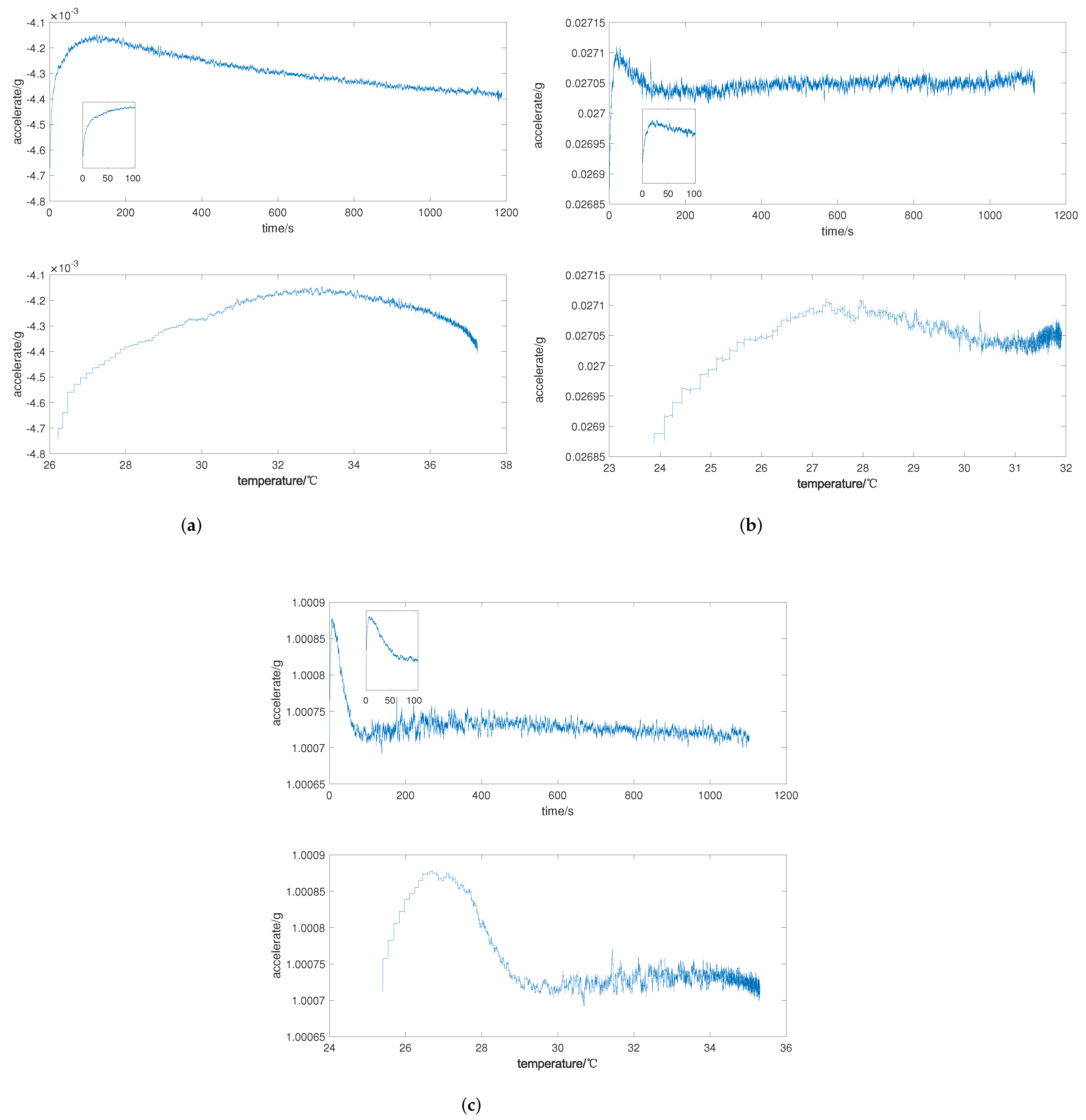
- Different accelerometers for the cold start-up phase generally show a rapid rise within a short time and gradually slow down until stabilization;
- (3)
- The output of different accelerometers has strong nonlinearity with temperature for the cold start-up phase;
- (4)
- The temperature drift repeats well under identical environmental conditions, which lays the foundation for temperature compensation.
2.3. Mechanism Analysis of Complex Temperature Drift for Cold Start-Up Phase
- (1)
- Due to the thermal effect of the feedback current, the complex drift is caused by the thermal deformation of the structure, the change in linear expansion coefficient for the quartz pendulum, the temperature coefficient of the magnetic steel, and the coil. These errors are derived from elastic elements, differential capacitors and magnetic circuits of mechanical components;
- (2)
- Considering the perspective of circuit, functional chips such as amplifier chips have the characteristic of start-up drift. Moreover, basic components of the circuit such as resistors and capacitors shift more when cold starting.
3. Temperature Compensation Model of Micro Digital Quartz Flexible Accelerometer
3.1. Traditional Temperature Compensation Model
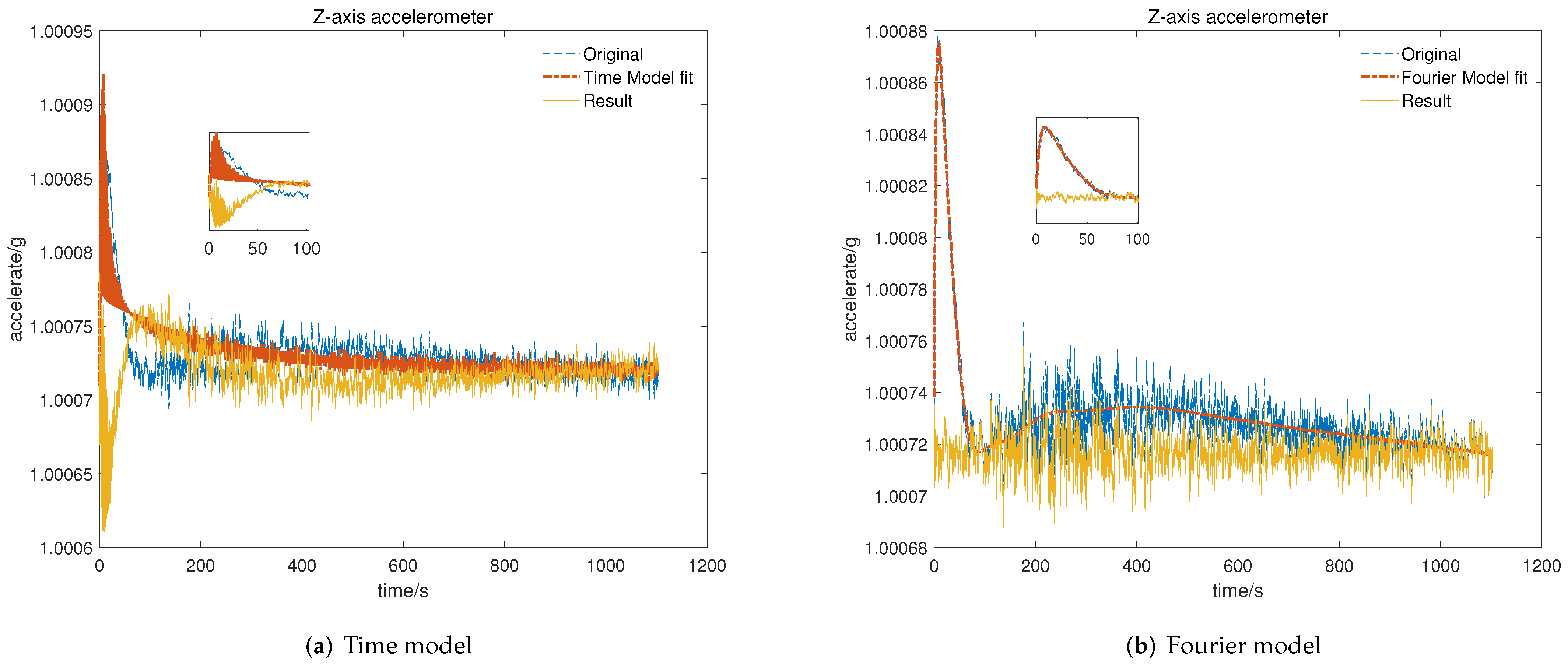
3.2. Temperature Compensation Model Based on High-Order Fourier Transform
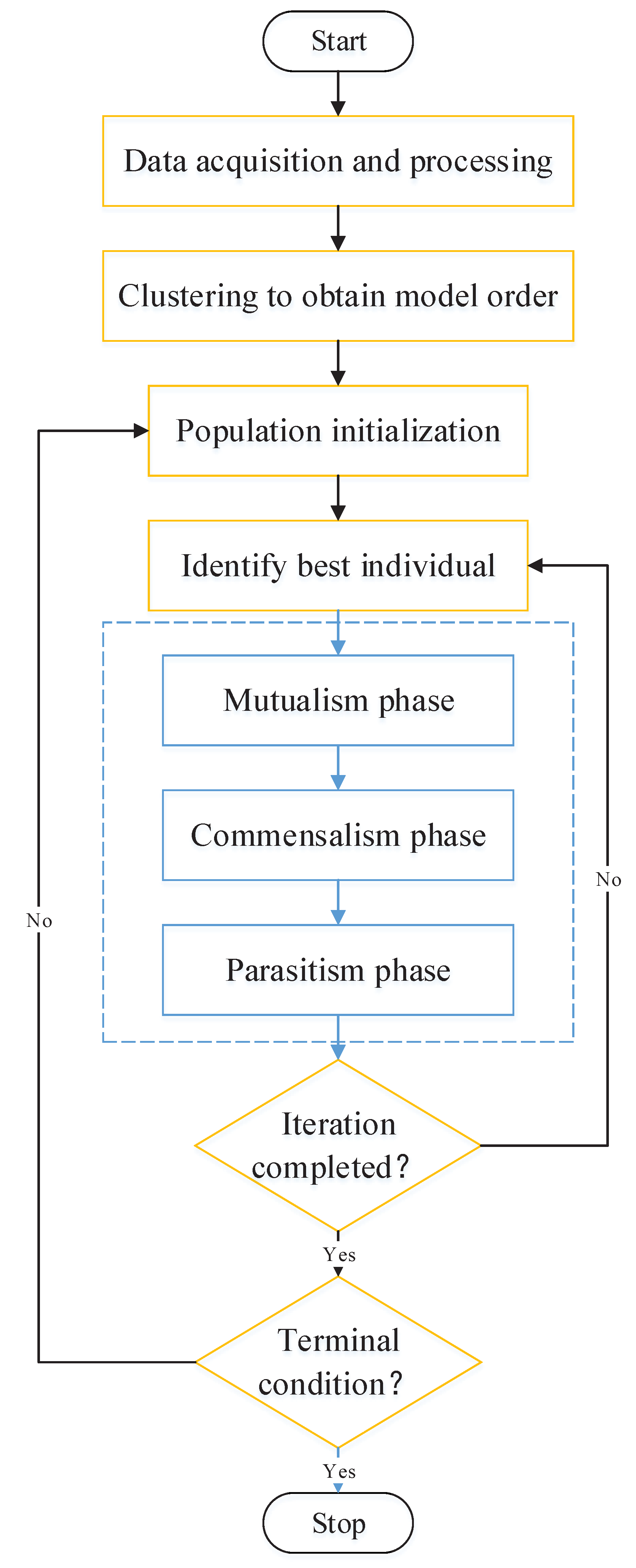
4. Modeling Method for Temperature Compensation Model
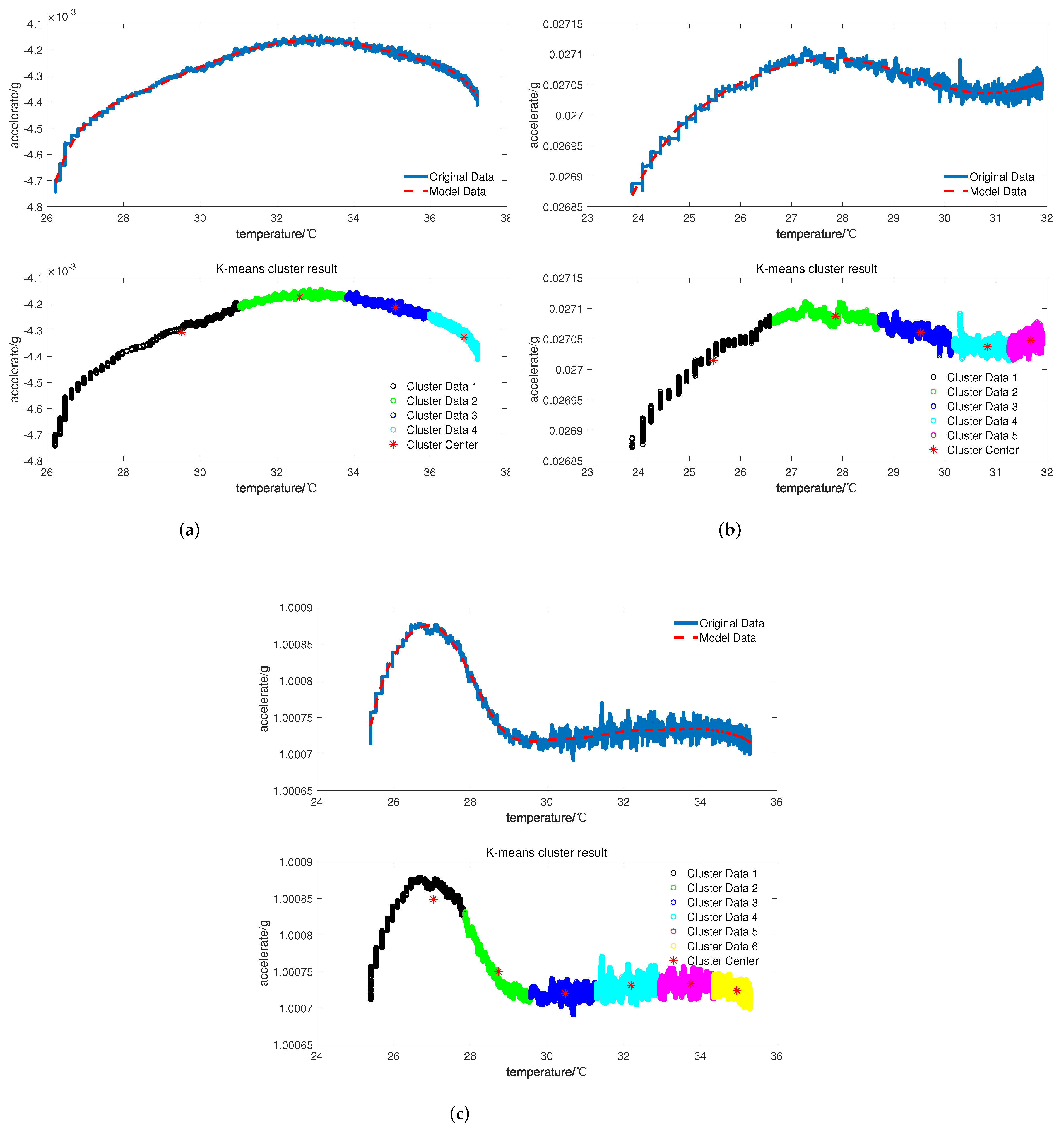
4.1. K-Means Clustering Algorithm Based on SSE
4.2. Symbiotic Organisms Search Intelligent Algorithm
- (a)
- MutualismMutualism is the most common symbiotic relation in nature, which means that both participants gain benefits from the symbiotic interaction. In the mutualism of the algorithm, for any individual X, X is randomly chosen to interact with and remain different from X. The individuals’ update formula is described in Equation (6):in Equation (6), rand is a random number between 0 and 1, BF and BF represent beneficial factors with the value of either 1 or 2, X and X are corresponding individuals after update, and X donates the greatest individual adaptation; the last parameter MV is the average of X and X, which indicates the common characteristics between X and X. Therefore, (X− MV ∗ BF) signifies that X and X work together to get closer to X. According to the formula (6), individuals of the initial population all need to be updated and then compared with the previous ones. If it is better than the former one, X and X would be replaced with X and X.
- (b)
- CommensalismCommensalism is a kind of symbiotic relationship among two organisms where one organism could benefit while the other receives nothing. Just as with the mutualism phase, we select a random organism Xj to interact with organism Xi and update them in accordance with Formula (7):where the definition of related variables is the same as Equation (6). So, (X−X) reflects the assistance X provides to X to improve its adaption level. At last, we choose the better one from X and X.
- (c)
- ParasitismParasitism is a kind of elimination mechanism for organisms in a natural form in which one organism benefits and at the same time has an adverse effect on the other organism. The relationship is described as follows:where D is the dimension of each individual; ceil is a function to obtain the integer; and d represents any integral dimension ranging from 1 to D; X and X indicate the maximum and minimum value of range in the d dimension. If the value of X is larger than that of X, then it will eliminate X and replace its position in the population.
5. Identification and Compensation of Temperature Compensation Model
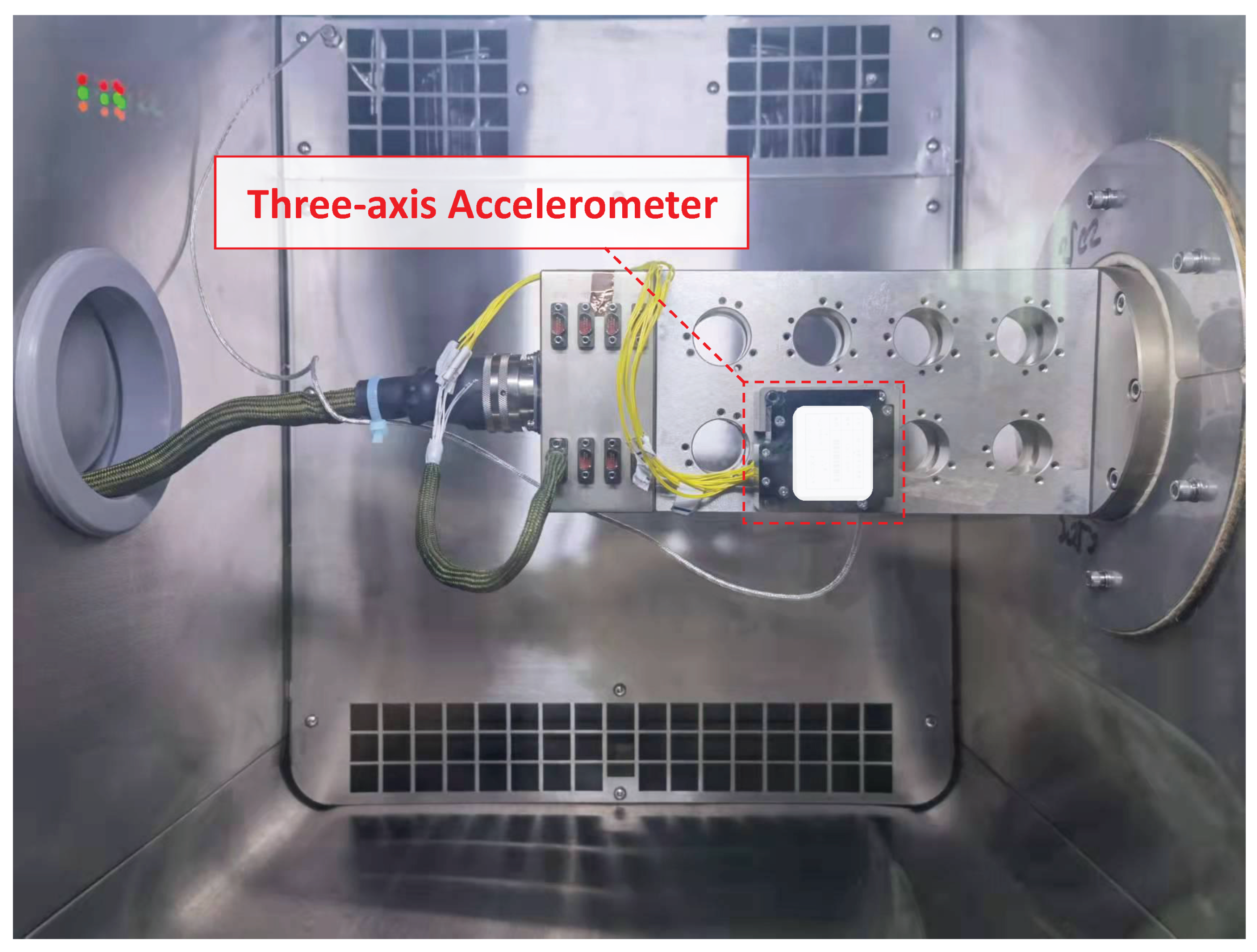
5.1. Experimental Design of Temperature Compensation
5.2. Identification of the Temperature Compensation Model
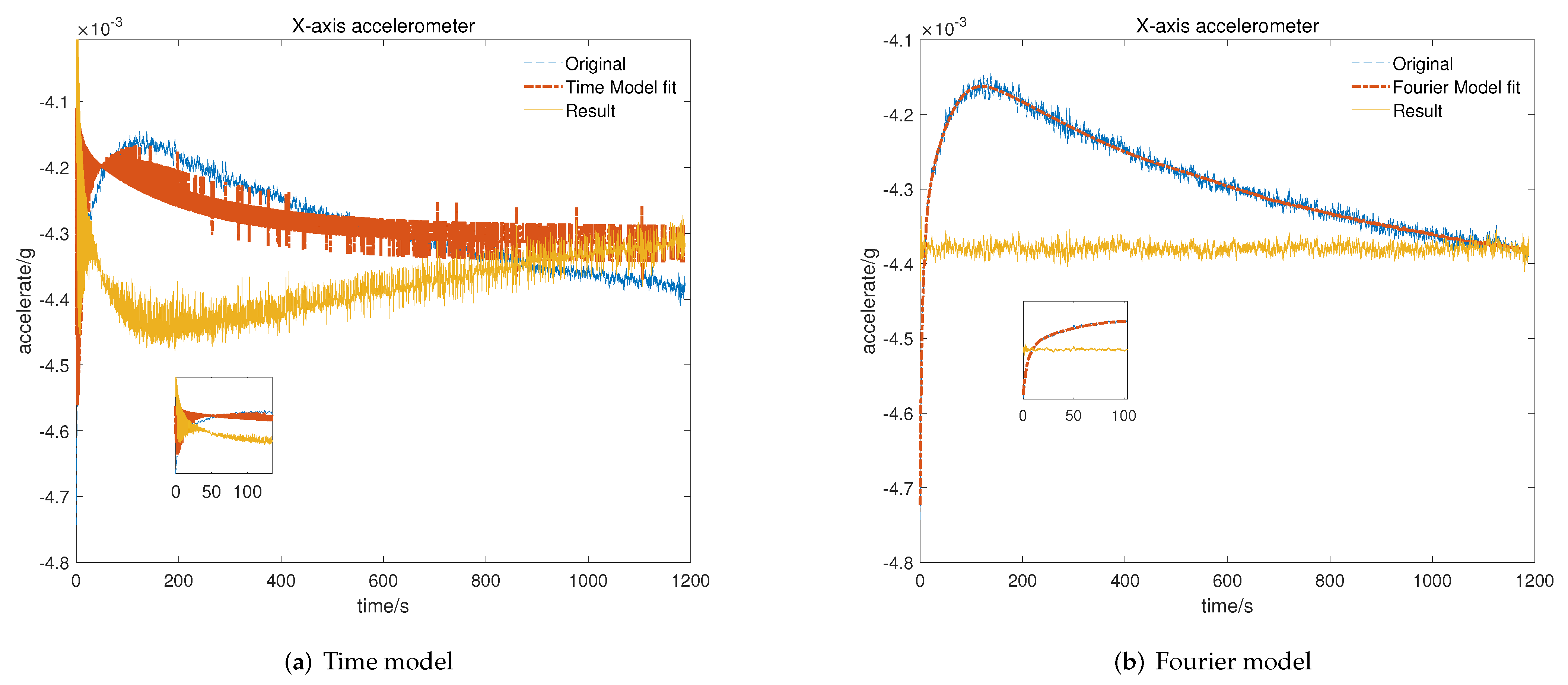
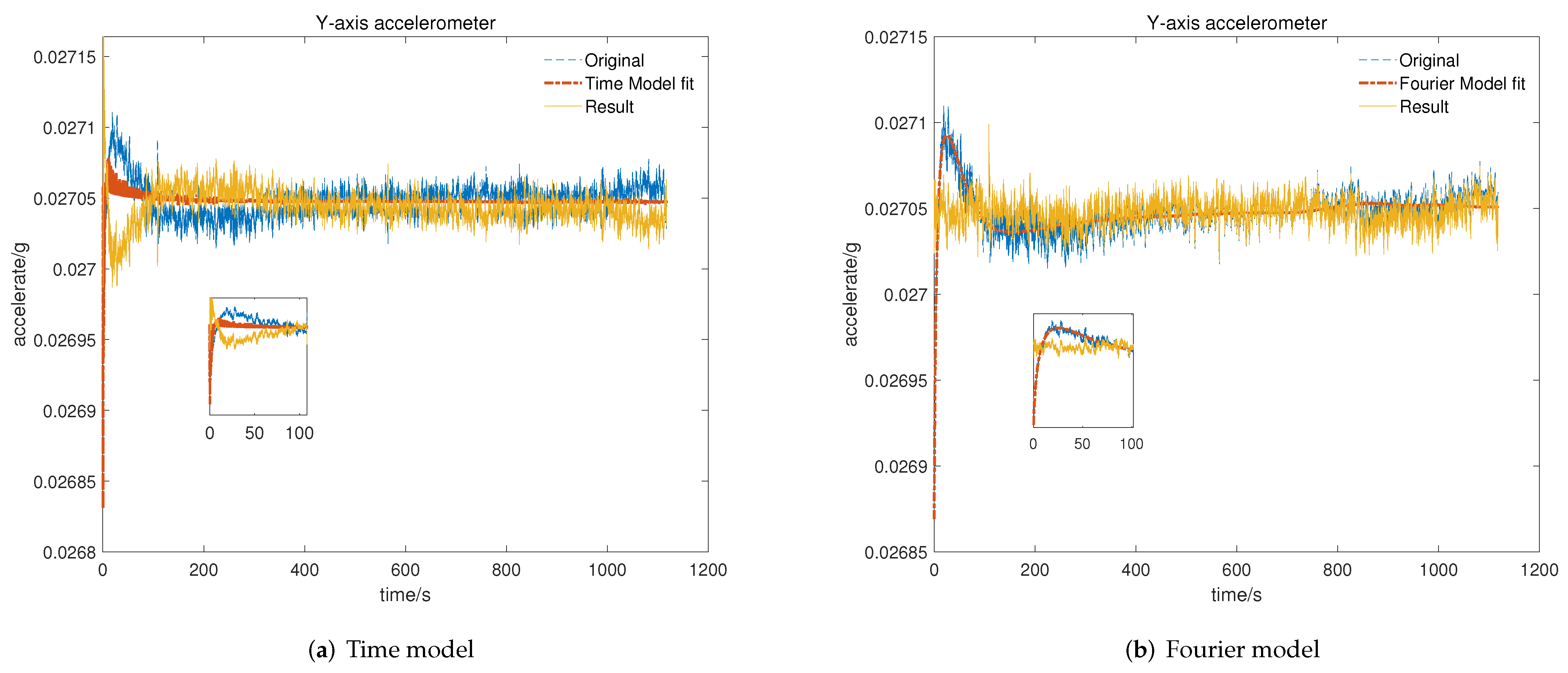
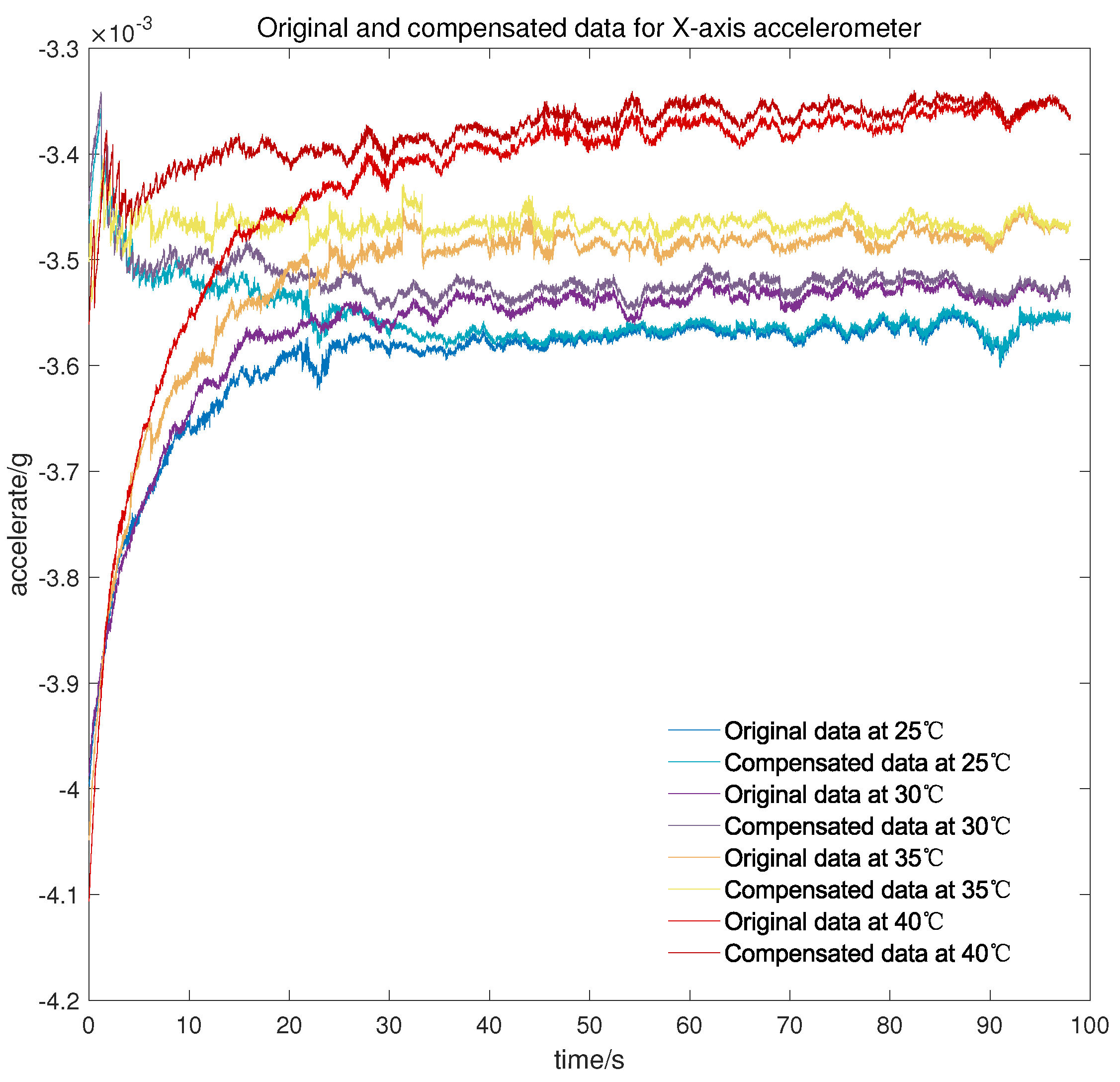
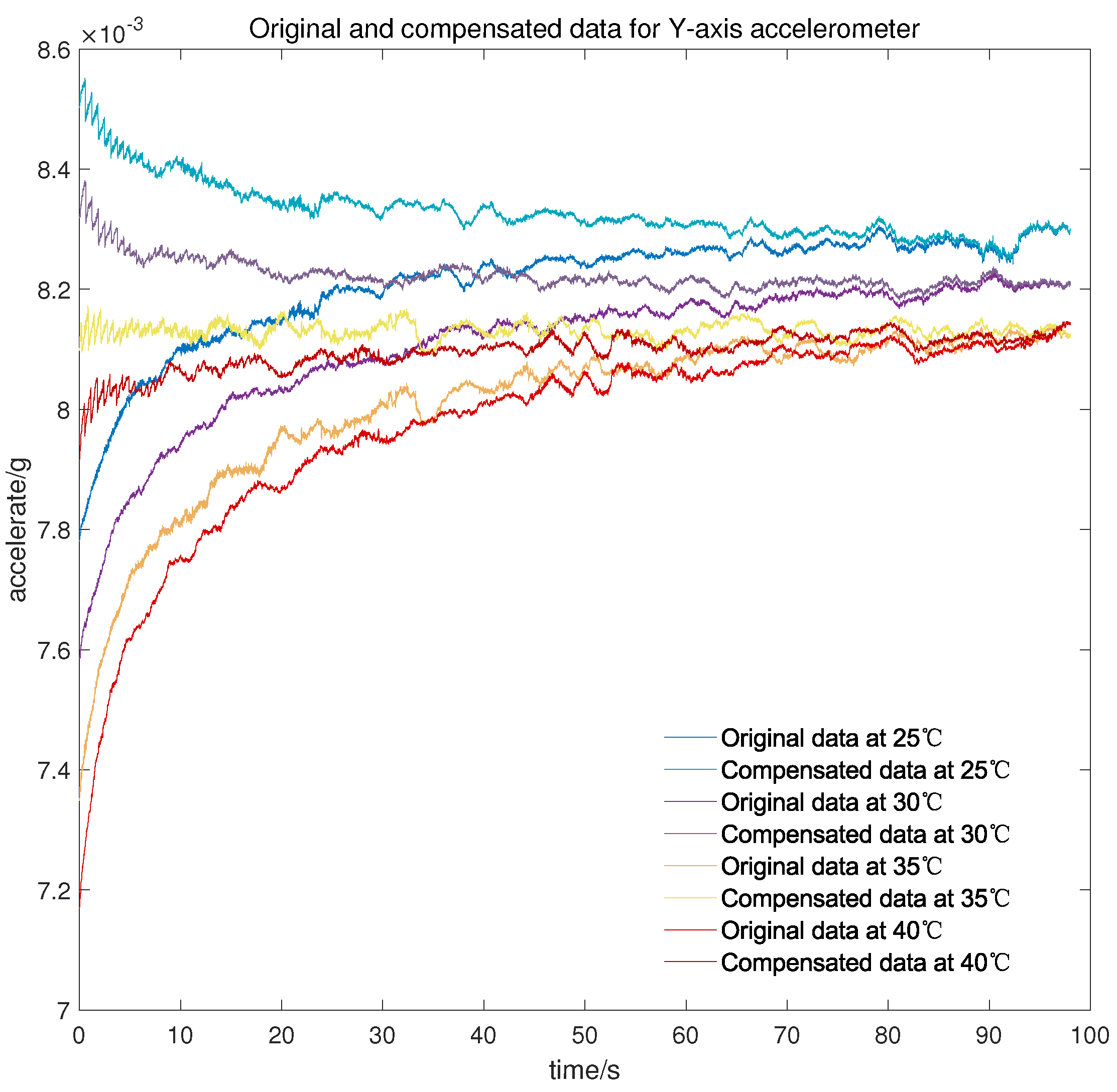
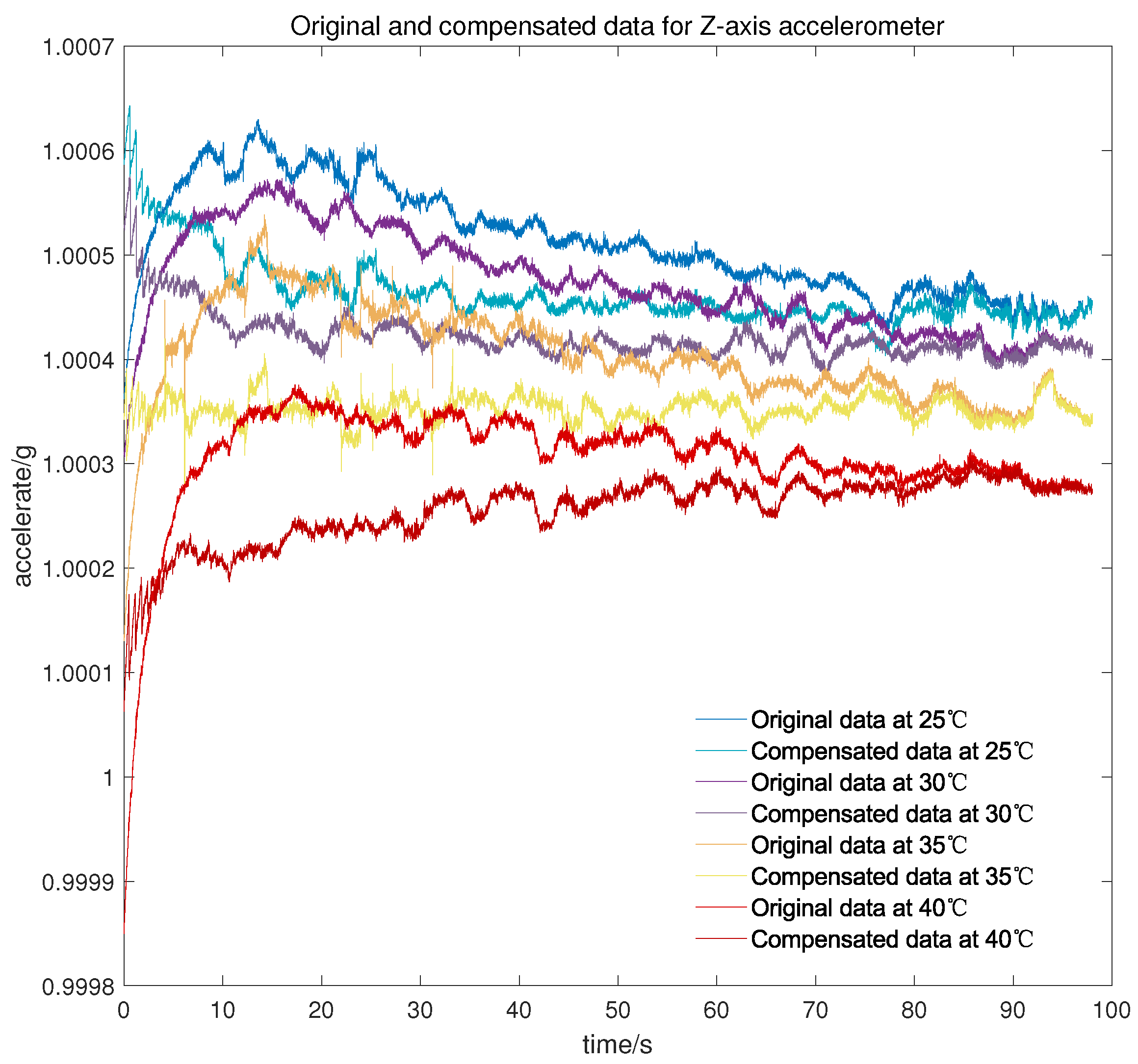
5.3. Verification of Temperature Compensation Model
6. Conclusions
- (a)
- The proposed model possesses a simple structure, and its basic expression can be described as the accumulation of trigonometric functions, which makes it easier to be programmed in the processor than the time-related temperature compensation model for containing exponential terms;
- (b)
- The time-related model contains time variables and exponential functions so that the resource consumption in the processor gradually increases with time. The proposed model is only related to temperature when model parameters are determined, which greatly increases the engineering practicability of the model;
- (c)
- The particle swarm optimization (PSO) used in the time-related model has poor convergence ability in the case of multivariate large-scale optimization, so as a result, it has large residuals of model fitting and low efficiency for model identification. In contrast, the proposed K-means–SOS–Fourier method utilizes an improved clustering algorithm to estimate the model order and then identify model parameters with the symbiotic organisms search (SOS) intelligent algorithm whose global optimization and local convergence capabilities are better than PSO. All the measures have been proved to improve the accuracy and efficiency of model identification effectively;
- (d)
- The actual output of the accelerometer in the cold start-up phase is complex and diverse so that it is impossible for the output to be completely consistent with the characteristics of the response curve. Therefore, there will be still a large residual after temperature compensation with the time-related model. However, the proposed model, on the basis of high-order Fourier transform, can adapt to stronger nonlinear curves with the increase in the model orders, which means it is more practical in actual engineering applications.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, W.; Fang, B.; Tang, Y.Y.; Qin, X. A temperature compensation model for low cost quartz accelerometers and its application in tilt sensing. Math. Probl. Eng. 2016, 2016, 2950376. [Google Scholar] [CrossRef] [Green Version]
- Cotton, N.J.; Wilamowski, B.M. Compensation of sensors nonlinearity with neural networks. In Proceedings of the 2010 24th IEEE International Conference on Advanced Information Networking and Applications, Perth, Australia, 20–23 April 2010; pp. 1210–1217. [Google Scholar]
- Wang, Z.; Henneron, T.; Piriou, F.; Mipo, J.C. Energetic mesh-to-mesh projection of magnetic fields with respect to nonlinear BH curves. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar]
- Xu, D.; Lei, Z. The nonlinearity compensation of piezoresistive sensor based on Levenberg-Marquardt algorithm. In Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, Beijing, China, 7–10 August 2011; pp. 2118–2122. [Google Scholar]
- Weis, H.; Hilbrunner, F.; Fröhlich, T.; Jäger, G. Mechatronic FEM model of an electromagnetic-force-compensated load cell. Meas. Sci. Technol. 2012, 23, 074018. [Google Scholar] [CrossRef]
- Xu, J.B.; Yu, H.M. Compensation Method of Temperature Effect on Rated Output for Strain Gauge Load Cell. J. Chengde Pet. Coll. 2007, 04, 30–32. [Google Scholar]
- Wang, C.; Li, X.; Kou, K.; Long, C. Optimization of magnetic hat for quartz flexible accelerometer. Sens. Rev. 2016, 36, 71–76. [Google Scholar] [CrossRef]
- Gao, J.M.; Zhang, K.B.; Chen, F.B.; Yang, H.B. Temperature characteristics and error compensation for quartz flexible accelerometer. Int. J. Autom. Comput. 2015, 12, 540–550. [Google Scholar] [CrossRef] [Green Version]
- Günhan, Y.; Ünsal, D. Polynomial degree determination for temperature dependent error compensation of inertial sensors. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium-PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 1209–1212. [Google Scholar]
- Zhang, C.; Wang, X.; Song, L.; Ran, L. Temperature Hysteresis Mechanism and Compensation of Quartz Flexible Accelerometer in Aerial Inertial Navigation System. Sensors 2021, 21, 294. [Google Scholar] [CrossRef]
- Chen, F.; Zhang, K. Identification for temperature model and the method for temperature compensation of quartz flexible accelerometer. In Proceedings of the 2015 IEEE Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 19–20 December 2015; pp. 841–845. [Google Scholar]
- Gotlib, V.; Evlanov, E.; Zubkov, B.; Linkin, V.; Manukin, A.; Podkolzin, S.; Rebrov, V. High-sensitivity quartz accelerometer for measurements of small accelerations of spacecraft. Cosm. Res. 2004, 42, 54–59. [Google Scholar] [CrossRef]
- Denghua, L.; Xuefei, L. Quartz flexible accelerometer temperature characteristic and scale factor. Ferroelectrics 2013, 457, 159–164. [Google Scholar] [CrossRef]
- Feng, L.S.; Wang, H.; Zhou, Z.; Yang, G.L. Studies on Static Temperature Compensation for Vibrating Beam Accelerometer. Appl. Mech. Mater. 2014, 455, 298–303. [Google Scholar] [CrossRef]
- Wang, S.; Zhu, W.; Shen, Y.; Ren, J.; Gu, H.; Wei, X. Temperature compensation for MEMS resonant accelerometer based on genetic algorithm optimized backpropagation neural network. Sens. Actuators A Phys. 2020, 316, 112393. [Google Scholar] [CrossRef]
- Han, Z.; Hong, L.; Meng, J.; Li, Y.; Gao, Q. Temperature drift modeling and compensation of capacitive accelerometer based on AGA-BP neural network. Measurement 2020, 164, 108019. [Google Scholar] [CrossRef]
- Ran, L.; Zhang, C.; Song, L.; Lu, J. The Estimation and Compensation of the Loop-Parameter-Drifting in the Digital Close-Loop Quartz Flexible Accelerometers. IEEE Access 2019, 8, 5678–5687. [Google Scholar] [CrossRef]
- Yu, X.D.; Li, J.L.; Yan, S.K.; Wei, G.; Li, G. Temperature drift compensation based on artificial fish swarm algorithm for quartz flexible accelerometer. Appl. Mech. Mater. 2014, 513, 4030–4034. [Google Scholar] [CrossRef]
- Wu, J.; Huang, T.; Zhu, Z.; Song, K. Cold starting temperature time-related compensation model of inertial sensors based on particle swarm optimization algorithm. Rev. Sci. Instrum. 2021, 92, 065106. [Google Scholar] [CrossRef]
- Maochao, Y.U.; Wang, X.; Yang, H.; Song, J.; Amp, D. Study on Temperature Compensation Method of Quartz Flexible Accelerometer. Piezoelectrics Acoustooptics 2018, 40, 220–222. [Google Scholar]
- Pan, Y.; Li, L.; Ren, C.; Luo, H. Study on the compensation for a quartz accelerometer based on a wavelet neural network. Meas. Sci. Technol. 2010, 21, 105202. [Google Scholar] [CrossRef]
- Liflyand, E.; Tikhonov, S. The Fourier transforms of general monotone functions, Analysis and Mathematical Physics. Trends Math. 2009, 24, 377–395. [Google Scholar]
- Ye, J.; Lin, Z.; You, J.; Huang, S.; Wu, H. Inconsistency calibrating algorithms for large scale piezoresistive electronic skin. Micromachines 2020, 11, 162. [Google Scholar] [CrossRef] [Green Version]
- Syakur, M.; Khotimah, B.; Rochman, E.; Satoto, B.D. Integration k-means clustering method and elbow method for identification of the best customer profile cluster. Iop Conf. Ser. Mater. Sci. Eng. 2018, 336, 012017. [Google Scholar] [CrossRef] [Green Version]
- Ghosh, D.; Mahato, A.K.; Onuya, A.G.A.; Singh, A.K.; Kumar, M.; Banik, P.; Das, S.; Biswas, M.; Maji, D.; Dutta, S.; et al. PSO based stability analysis of a computational intelligent algorithm using SOS. In Proceedings of the 2017 8th Annual Industrial Automation and Electromechanical Engineering Conference (IEMECON), Bangkok, Thailand, 16–18 August 2017; pp. 309–313. [Google Scholar]
- Wiens, J.J.; Moen, D.S. Missing data and the accuracy of Bayesian phylogenetics. J. Syst. Evol. 2008, 46, 307–314. [Google Scholar]
- Wan, H.P.; Ni, Y.Q. Bayesian multi-task learning methodology for reconstruction of structural health monitoring data. Struct. Health Monit. 2018, 18, 1282–1309. [Google Scholar] [CrossRef] [Green Version]
- Armstrong, S.; Kokaram, A.C.; Rayner, P.J. Bayesian framework for reconstructing missing data in color image sequences. Bayesian Inference Inverse Probl. 1998, 3459, 21–28. [Google Scholar]
- Mochnac, J.; Marchevsky, S.; Kocan, P. Bayesian filtering techniques: Kalman and extended Kalman filter basics. In Proceedings of the 2009 19th International Conference Radioelektronika, Bratislava, Slovak, 22–23 April 2009; pp. 119–122. [Google Scholar]
- Chen, G. A simple treatment for suboptimal Kalman filtering in case of measurement data missing. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 413–415. [Google Scholar] [CrossRef]
- Xiao, S.; Mu, N.; Chen, F. A New Diffusion Kalman Algorithm Dealing with Missing Data. In International Symposium on Neural Networks; Springer: Cham, Switzerland, 2019; pp. 273–281. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Before Temperature Compensation | After Temperature Compensation with Time-Related Model | After Temperature Compensation with Fourier-Related Model | ||||
|---|---|---|---|---|---|---|
| Stability | Maximum Drift Error | Stability | Maximum Drift Error | Stability | Maximum Drift Error | |
| X-axis ( g) | 70.432 | 597.76 | 59.659 | 365.98 | 6.0296 | 43.461 |
| Y-axis ( g) | 13.072 | 238.19 | 12.958 | 121.43 | 6.9997 | 40.058 |
| Z-axis ( g) | 22.362 | 187.17 | 18.349 | 87.5 | 6.5028 | 37.164 |
| X-Axis Accelerometer | Y-Axis Accelerometer | Z-Axis Accelerometer | ||||
|---|---|---|---|---|---|---|
| Before | After Compensation | Before | After Compensation | Before | After Compensation | |
| 25 °C ( g) | 64.928 | 29.746 | 92.636 | 47.278 | 51.230 | 32.480 |
| 30 °C ( g) | 74.020 | 22.035 | 118.01 | 25.301 | 48.679 | 22.640 |
| 35 °C ( g) | 85.229 | 9.5608 | 138.57 | 12.670 | 47.890 | 12.032 |
| 40 °C ( g) | 113.02 | 28.493 | 168.68 | 29.941 | 54.658 | 31.651 |
| X-Axis Accelerometer | Y-Axis Accelerometer | Z-Axis Accelerometer | ||||
|---|---|---|---|---|---|---|
| Before | After Compensation | Before | After Compensation | Before | After Compensation | |
| 25 °C | −0.003596 | −0.003541 | 0.008209 | 0.008329 | 1.000512 | 1.000463 |
| 30 °C | −0.003566 | −0.003517 | 0.008105 | 0.008223 | 1.000472 | 1.000422 |
| 35 °C | −0.003516 | −0.003466 | 0.008008 | 0.008131 | 1.000403 | 1.000352 |
| 40 °C | −0.003429 | −0.003378 | 0.007974 | 0.008096 | 1.000305 | 1.000260 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Sun, X.; Huang, T.; Ye, L.; Song, K. Cold Starting Temperature Drift Modeling and Compensation of Micro-Accelerometer Based on High-Order Fourier Transform. Micromachines 2022, 13, 413. https://0-doi-org.brum.beds.ac.uk/10.3390/mi13030413
Wang Y, Sun X, Huang T, Ye L, Song K. Cold Starting Temperature Drift Modeling and Compensation of Micro-Accelerometer Based on High-Order Fourier Transform. Micromachines. 2022; 13(3):413. https://0-doi-org.brum.beds.ac.uk/10.3390/mi13030413
Chicago/Turabian StyleWang, Yi, Xinglin Sun, Tiantian Huang, Lingyun Ye, and Kaichen Song. 2022. "Cold Starting Temperature Drift Modeling and Compensation of Micro-Accelerometer Based on High-Order Fourier Transform" Micromachines 13, no. 3: 413. https://0-doi-org.brum.beds.ac.uk/10.3390/mi13030413