
Design of a Biologically Inspired Water-Walking Robot Powered by Artificial Muscle

 ,
,  , , , and
, , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Fabrication
2.2. Design of the CASA
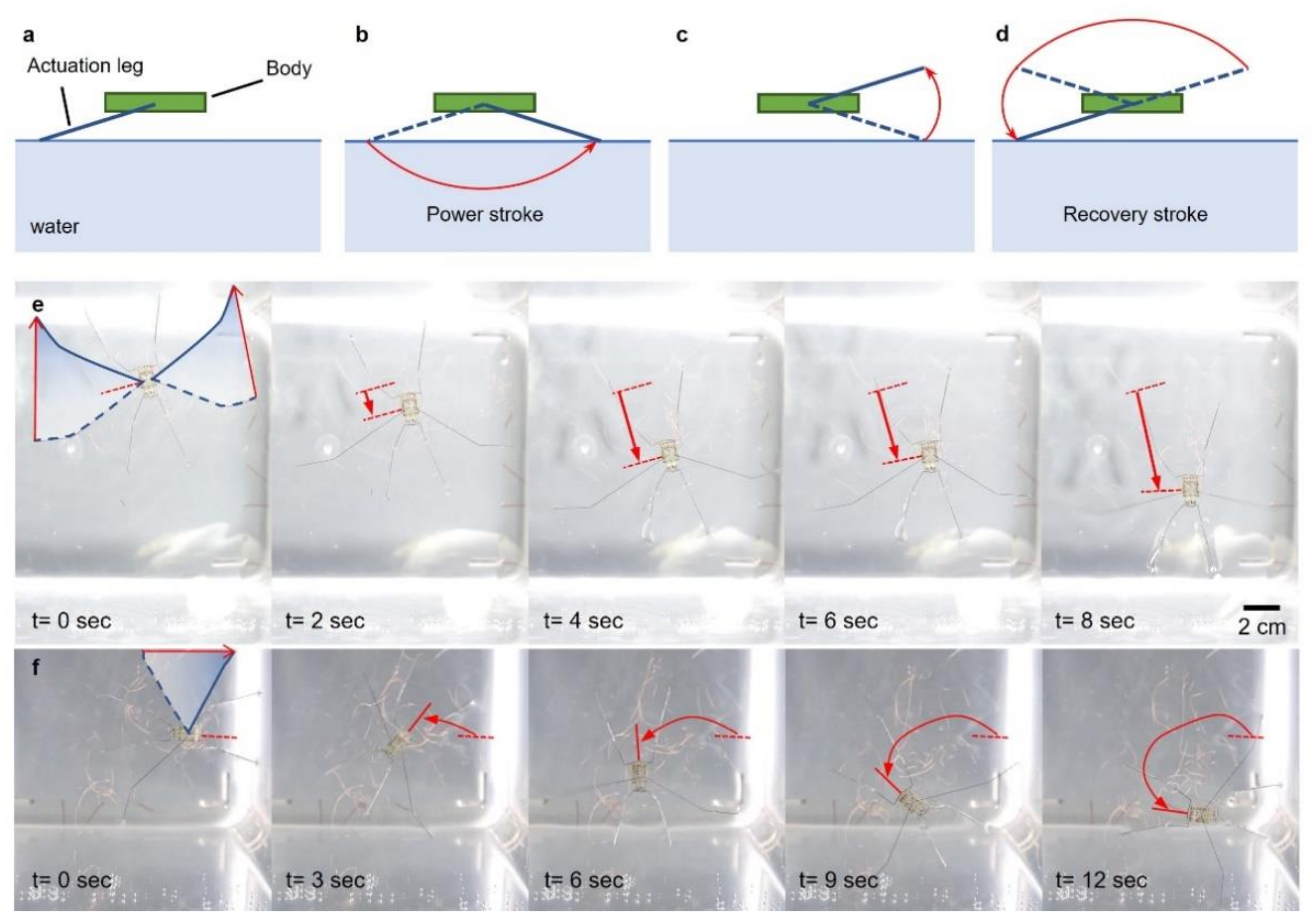
2.3. Design of Sculling Mechanism
3. Results and Discussion
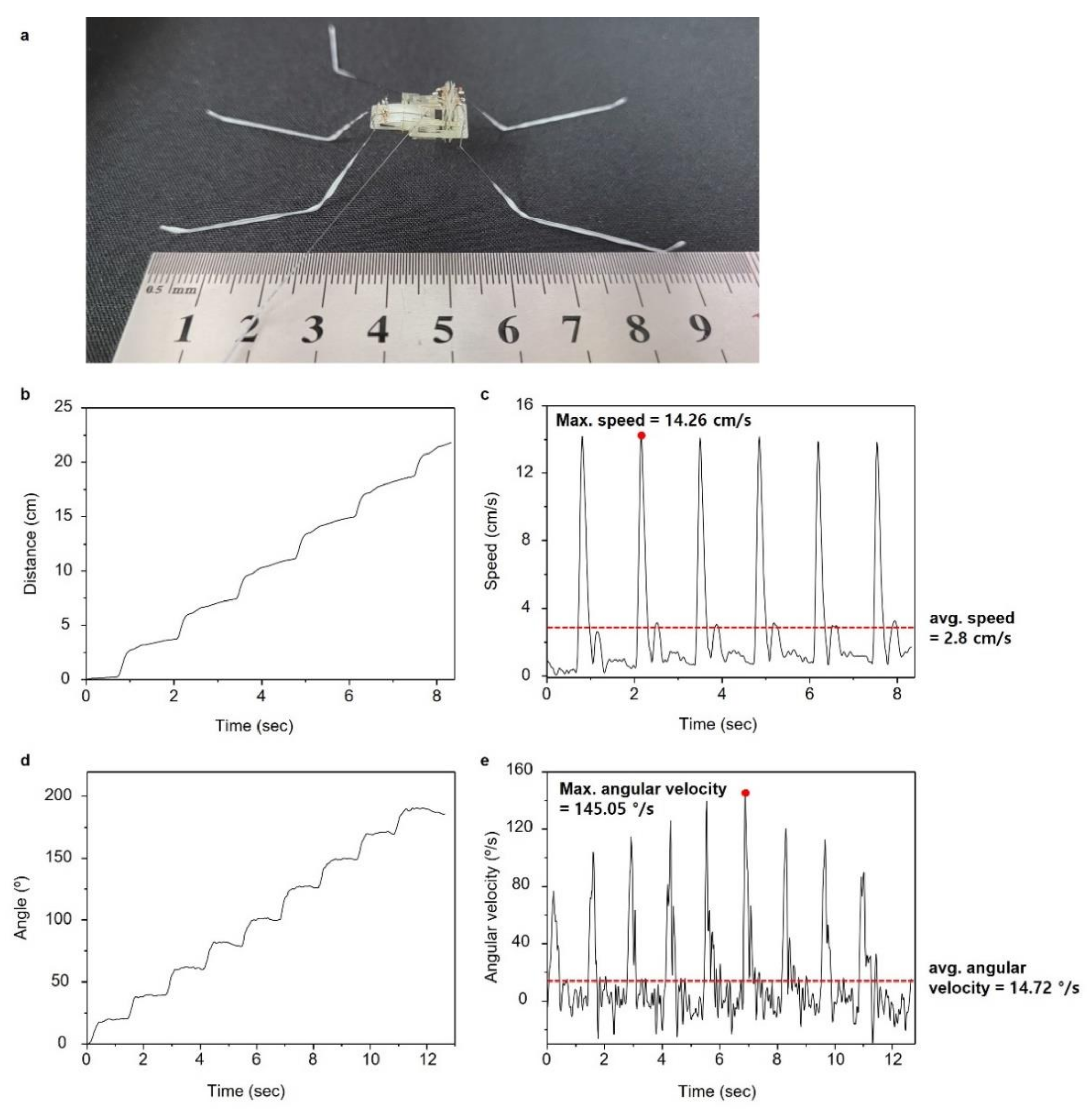
3.1. Trajectory of the Actuating Leg and Water-Walking Robot
3.2. Comparison with Other Robots
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wood, R.J. The first takeoff of a biologically inspired at-scale robotic insect. IEEE Trans. Robot. 2008, 24, 341–347. [Google Scholar] [CrossRef]
- Koh, J.-S.; Yang, E.; Jung, G.-P.; Jung, S.-P.; Son, J.H.; Lee, S.-I.; Jablonski, P.G.; Wood, R.J.; Kim, H.-Y.; Cho, K.-J. Jumping on water: Surface tension-dominated jumping of water striders and robotic insects. Science 2015, 349, 517–522. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Doshi, N.; Goldberg, B.; Wang, H.; Wood, R.J. Controllable water surface to underwater transition through electrowetting in a hybrid terrestrial-aquatic microrobot. Nat. Commun. 2018, 9, 2495. [Google Scholar] [CrossRef] [PubMed]
- Hoover, A.M.; Steltz, E.; Fearing, R.S. RoACH: An autonomous 2.4 g crawling hexapod robot. In Proceedings of the RoACH: An Autonomous 2.4 g Crawling Hexapod Robot, Nice, France, 22–26 September 2008; pp. 26–33. [Google Scholar]
- Hu, D.L.; Bush, J.W.M. The hydrodynamics of water-walking arthropods. J. Fluid Mech. 2010, 644, 5–33. [Google Scholar] [CrossRef] [Green Version]
- Hu, D.L.; Prakash, M.; Chan, B.; Bush, J.W.M. Water-walking devices. Exp. Fluids 2007, 43, 769–778. [Google Scholar] [CrossRef]
- Bush, J.W.M.; Hu, D.L. Walking on water: Biolocomotion at the interface. Annu. Rev. Fluid Mech. 2006, 38, 339–369. [Google Scholar] [CrossRef]
- Hu, D.L.; Chan, B.; Bush, J.W.M. The hydrodynamics of water strider locomotion. Nature 2003, 424, 663–666. [Google Scholar] [CrossRef] [PubMed]
- Kwak, B.; Bae, J. Locomotion of arthropods in aquatic environment and their applications in robotics. Bioinspiration Biomim. 2018, 13, 041002. [Google Scholar] [CrossRef] [PubMed]
- Yan, J.; Zhang, X.; Yang, K.; Zhao, J. A single driven bionic water strider sliding robot mimicking the spatial elliptical trajectory. In Proceedings of the ROBIO 2019-International Conference on Robotics and Biomimetics, Dali, China, 6–8 December 2019; pp. 142–147. [Google Scholar]
- Yan, J.; Yang, K.; Liu, G.; Zhao, J. Flexible Driving Mechanism Inspired Water Strider Robot Walking on Water Surface. IEEE Access 2020, 8, 89643–89654. [Google Scholar] [CrossRef]
- Yan, J.H.; Zhang, X.B.; Zhao, J.; Liu, G.F.; Cai, H.G.; Pan, Q.M. A miniature surface tension-driven robot using spatially elliptical moving legs to mimic a water strider’s locomotion. Bioinspiration Biomim. 2015, 10, 46016. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Zhang, X.; Pan, Q. A water walking robot inspired by water strider. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; 962–967. [Google Scholar]
- Zhang, X.; Zhao, J.; Zhu, Q.; Chen, N.; Zhang, M.; Pan, Q. Bioinspired aquatic microrobot capable of walking on water surface like a water strider. ACS Appl. Mater. Interfaces 2011, 3, 2630–2636. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.S.; Sitti, M. STRIDE: A highly maneuverable and non-tethered water strider robot. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Rome, Italy, 10–14 April 2007; pp. 980–984. [Google Scholar]
- Ozcan, O.; Wang, H.; Taylor, J.D.; Sitti, M. STRIDE II: A water strider-inspired miniature robot with circular footpads. Int. J. Adv. Robot. Syst. 2014, 11, 85. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, K.; Takanobu, H.; Noya, K.; Koike, H.; Miura, H.L. Water strider robots with microfabricated hydrophobic legs. In Proceedings of the IEEE International Workshop on Intelligent Robots and Systems, San Diego, CA, USA, 20 October–2 November 2007; pp. 590–595. [Google Scholar]
- Suhr, S.H.; Song, Y.S.; Lee, S.J.; Sitti, M. Biologically inspired miniature water strider robot. Robot. Sci. Syst. 2005, 1, 319–325. [Google Scholar]
- Song, Y.S.; Sitti, M. Surface-tension-driven biologically inspired water strider robots: Theory and experiments. IEEE Trans. Robot. 2007, 23, 578–589. [Google Scholar] [CrossRef]
- Takonobu, H.; Kodaira, K.; Takeda, H. Water Strider’s Muscle Arrangement-based Robot. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005. [Google Scholar]
- Kim, D.; Kim, B.; Shin, B.; Shin, D.; Lee, C.-K.; Chung, J.-S.; Koh, J. Actuating Compact Augmented Reality Devices by Artificial Muscle. Res. Sq. 2021, in press. [Google Scholar] [CrossRef]
- Wang, L.; Gao, T.; Gao, F.; Xue, Y.; Wang, Y. Experimental research on locomotion characters of water strider and movement realization on a water strider robot. In Proceedings of the 2020 IEEE International Conference on Robotics and Biomimetics, ROBIO 2010, Tianjin, China, 14–18 December 2010; pp. 585–590. [Google Scholar]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.; Gwon, M.; Kim, B.; Ortega-Jimenez, V.M.; Han, S.; Kang, D.; Bhamla, M.S.; Koh, J.-S. Design of a Biologically Inspired Water-Walking Robot Powered by Artificial Muscle. Micromachines 2022, 13, 627. https://0-doi-org.brum.beds.ac.uk/10.3390/mi13040627
Kim D, Gwon M, Kim B, Ortega-Jimenez VM, Han S, Kang D, Bhamla MS, Koh J-S. Design of a Biologically Inspired Water-Walking Robot Powered by Artificial Muscle. Micromachines. 2022; 13(4):627. https://0-doi-org.brum.beds.ac.uk/10.3390/mi13040627
Chicago/Turabian StyleKim, Dongjin, Minseok Gwon, Baekgyeom Kim, Victor M. Ortega-Jimenez, Seungyong Han, Daeshik Kang, M. Saad Bhamla, and Je-Sung Koh. 2022. "Design of a Biologically Inspired Water-Walking Robot Powered by Artificial Muscle" Micromachines 13, no. 4: 627. https://0-doi-org.brum.beds.ac.uk/10.3390/mi13040627