
A Systematic Modelling Procedure to Design Agent-Oriented Control to Coalition of Capabilities—In the Context of I4.0 as Virtual Assets (AAS)

 ,
,  ,
,  , and
, and
Abstract
:1. Introduction
- (i)
- technicals applied in the methodology;
- (ii)
- formal description of the components with UML—Unified Model Language;
- (iii)
- procedural description of the activities that relate the AAS and;
- (iv)
- dynamic modeling of behavior with Petri Net (PN) enabling the validation of the proposed method.
2. Basic Concepts and Literature Review
2.1. Contextualizing Industry 4.0
- this cooperation provides a static and pre-defined model; however, the I4.0 characterized by uncertainty scenarios needs to change the engineering paradigms, allowing located and self-organize assets [2];
- the life cycle stages of a plant are well determined and known among Engineers; first the basic processes are defined for the production of a new product; second, engineering and documentation procedures describe how to perform the previous step; third the necessary equipment are selected from catalogs of manufacturers; the fourth step defines the plan of work, production order standards and test applications; fifth, it concerns the implementation stage, commissioning, and delivery of the plant to the customer [3];
- in case of revisions, the processes must restart. The hardware (HW) and software are not updated. The equipment changes without any connection with the planning and, the different engineering tools do not integrate information [3];
- there is a lack of tools to integrate the value chain, allowing detection in changes to the factory configuration.
- it defines the contents and objectives (similar to the traditional factory); however, the (DT) performs the other actions;
- a digital model enables analysis and decision making by experts and planning engineers. All the data is stored containing requirements and functions in the “object” model enabling select the features from a library of functions;
- electronics manufacturers’ catalogs conduce to choose all aspects and details of the equipment;
- instances of the model; this means select every “object function” and “equipment type” needed;
- occurs validation and simulation with the object models; generates the equipment orders, builds, tests, and put the plant in operation (digital world);
- the I4.0 model has generated automatically in run-time from the instance. Each component receives a default “administration shell”. In this sense, the parts will be ready to communicate with the real automation solution and other plant components [3].
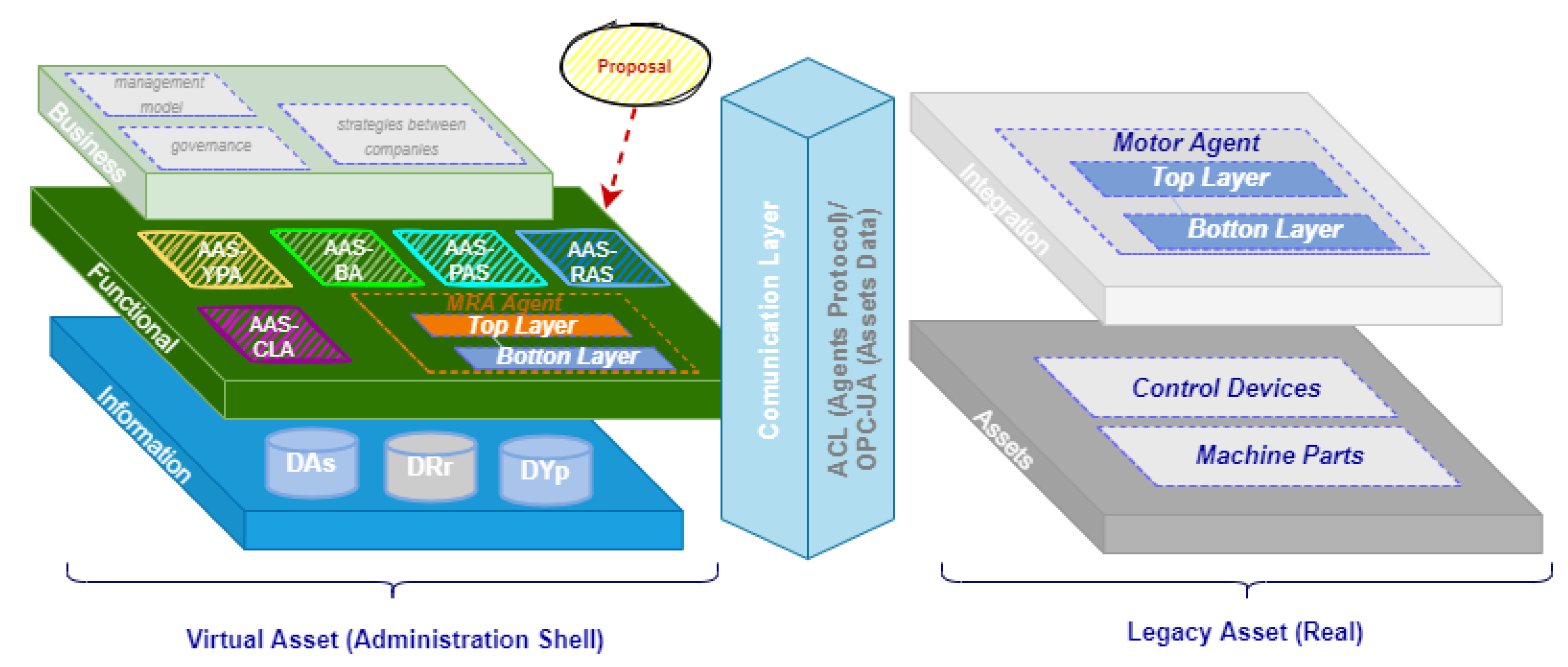
2.2. Virtual Representation in the I4.0 Context with AAS
2.3. Review of the Main Concepts Used to Model the Procedures
2.4. Representing the Proposal Elements with UML
2.5. Related Works about the Research
3. Proposal of a Conceptual Modeling of Activities for Procedure Creation of Agents in AAS
4. Results
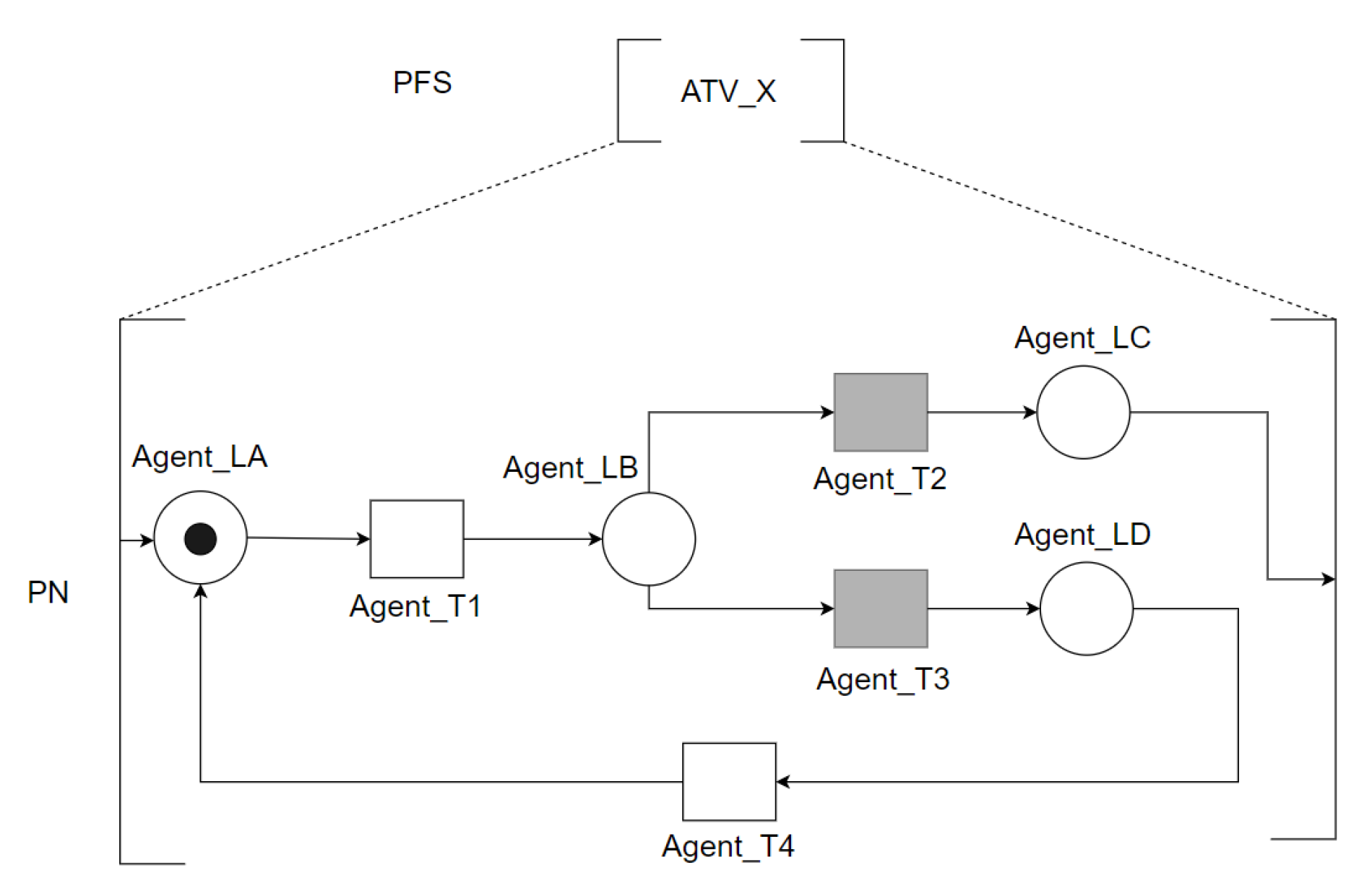
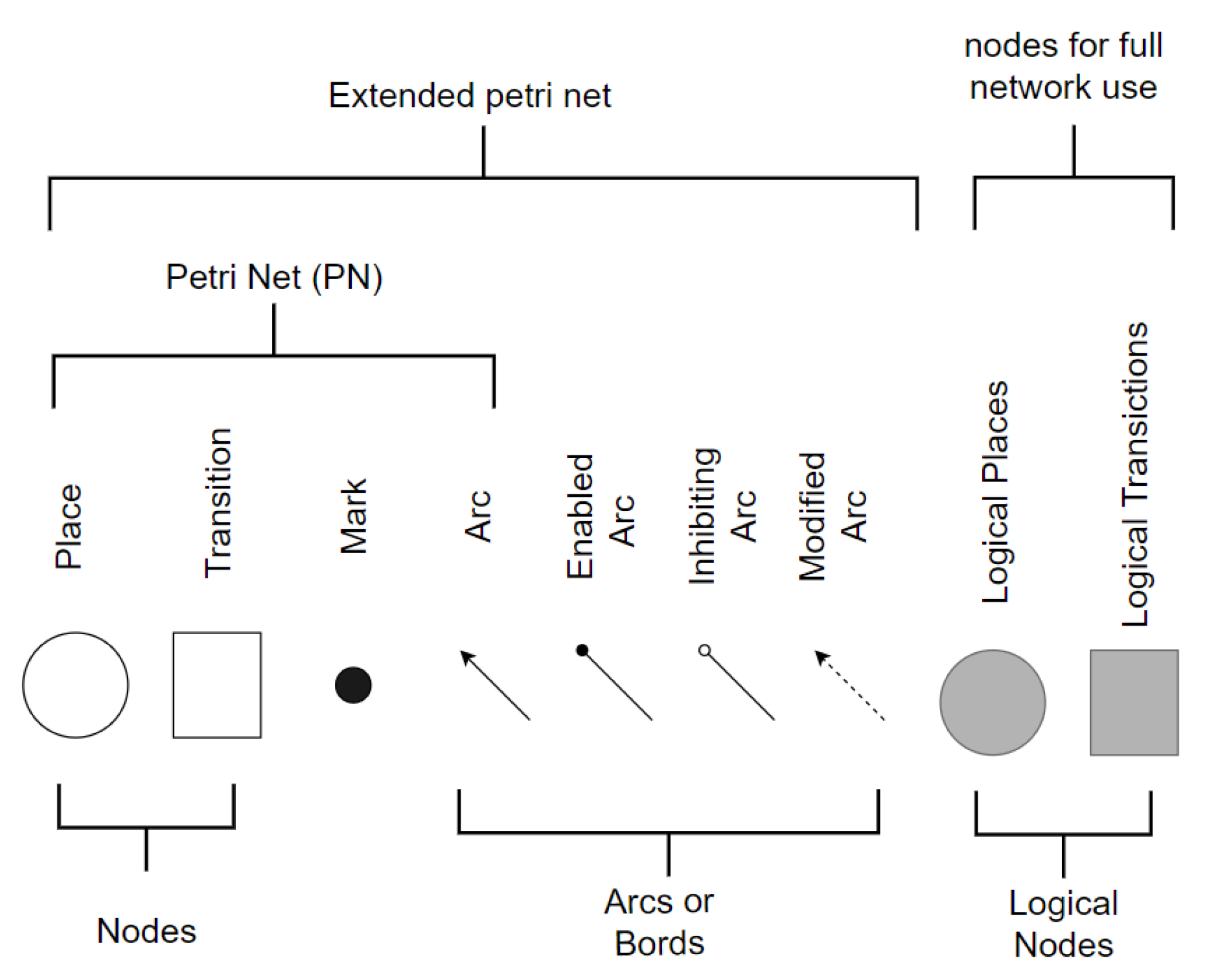
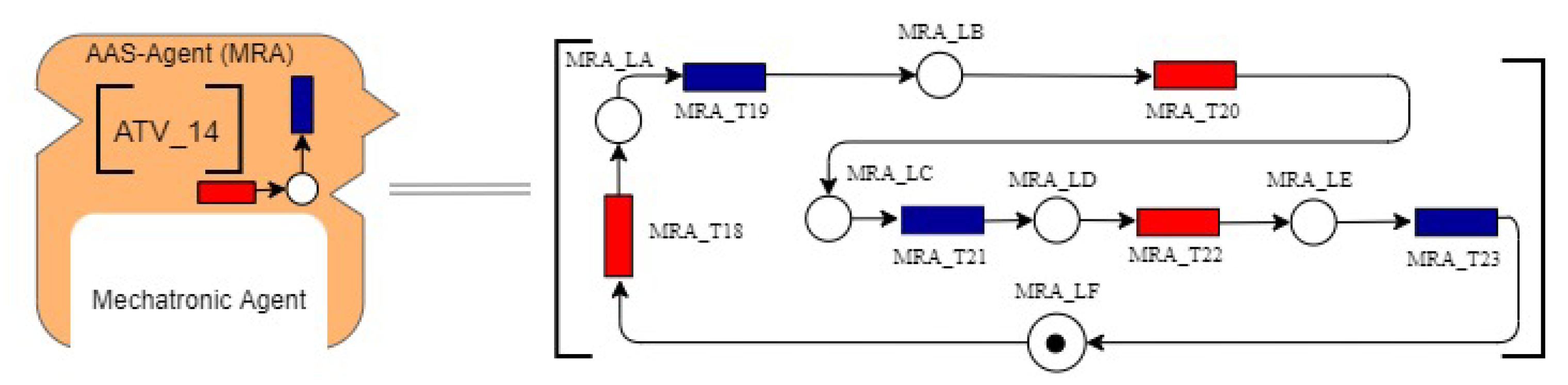
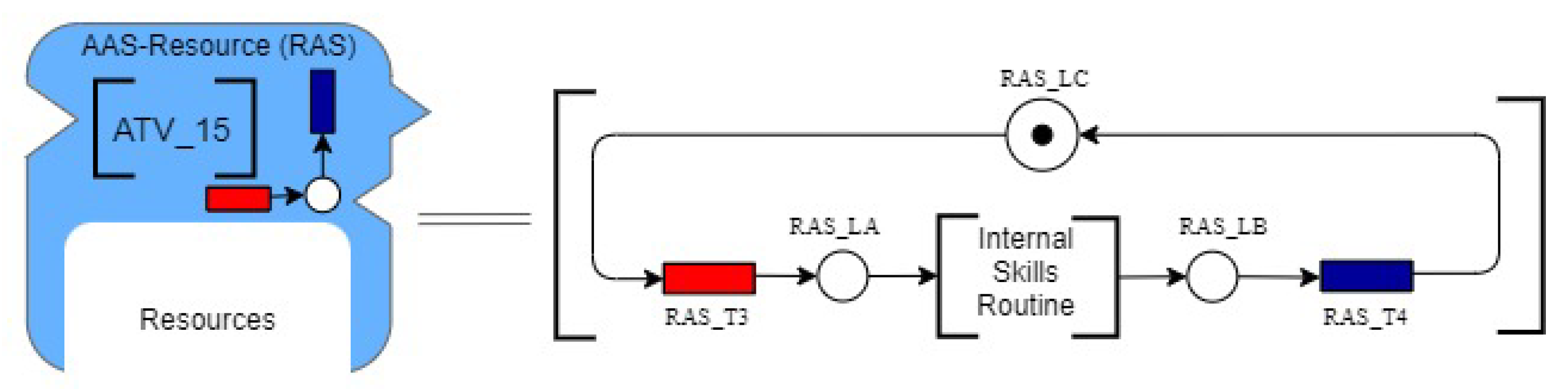
4.1. Functional Modeling of the Procedure Using a Petri Net—PN to Create the AAS-Agent Based Activities
4.2. Combination of Process Activity Diagrams in PN to Simulate the Procedure
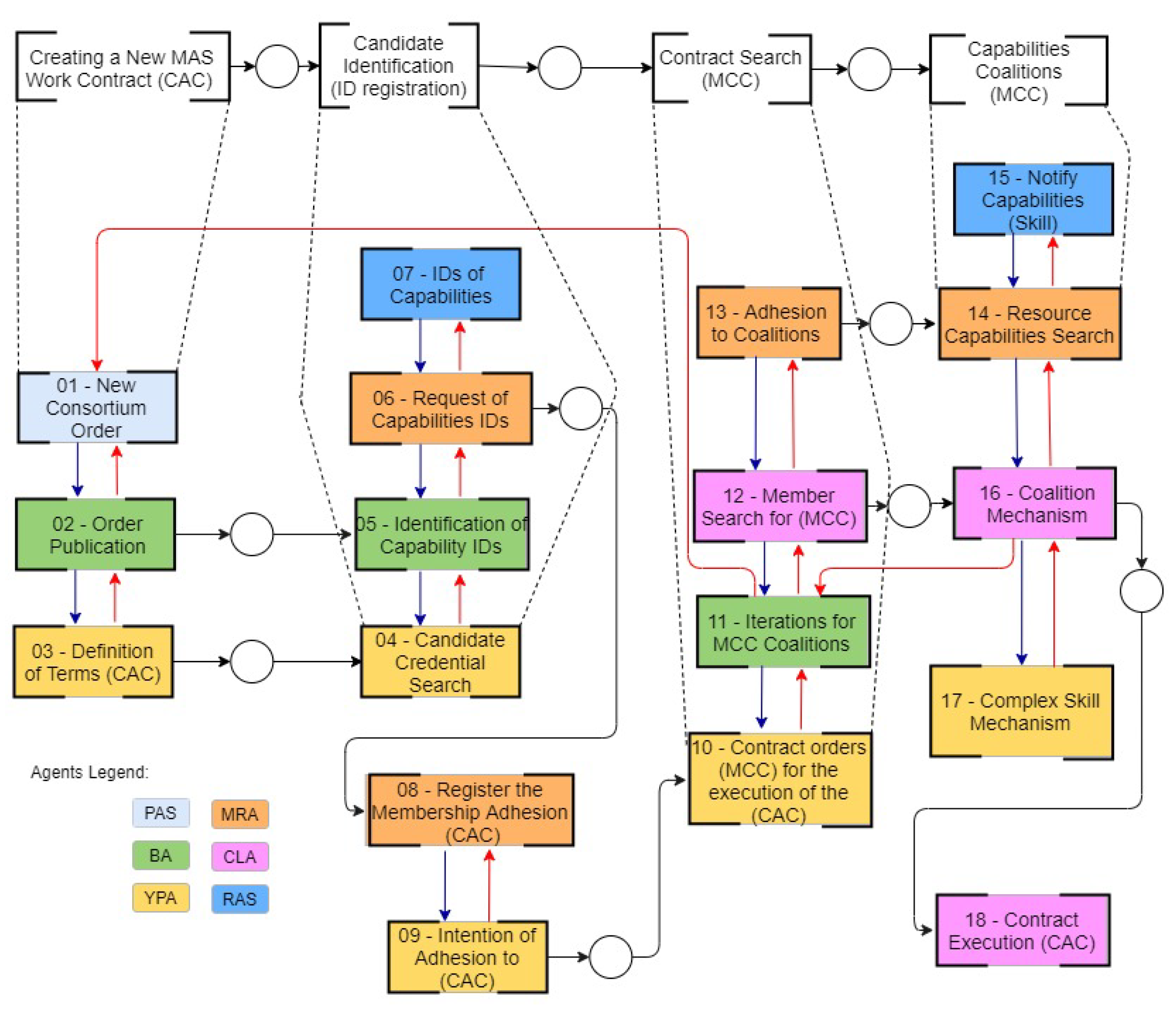
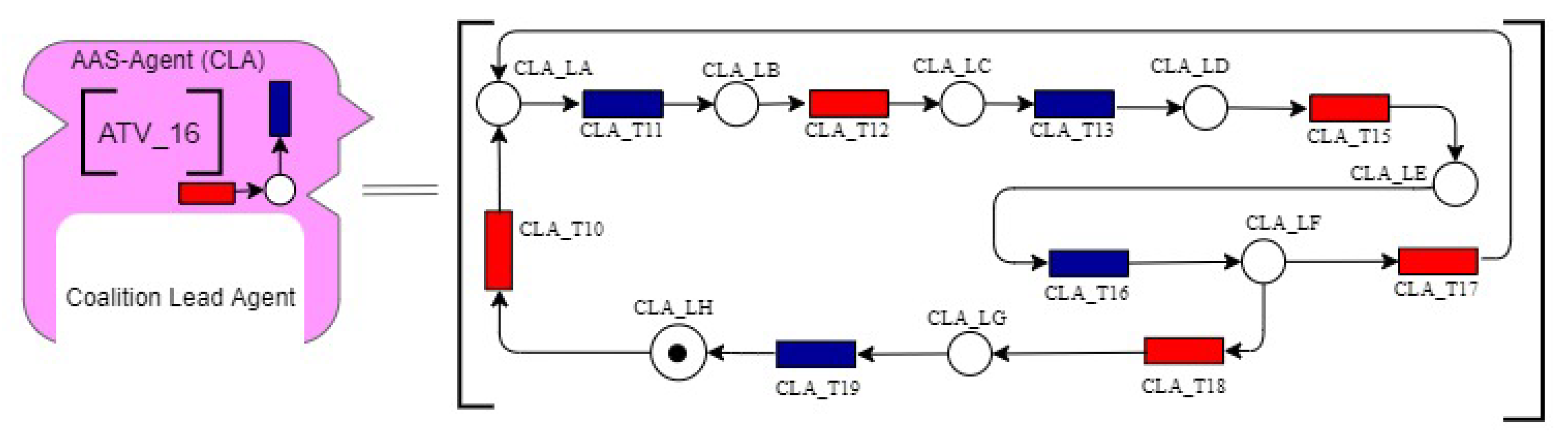
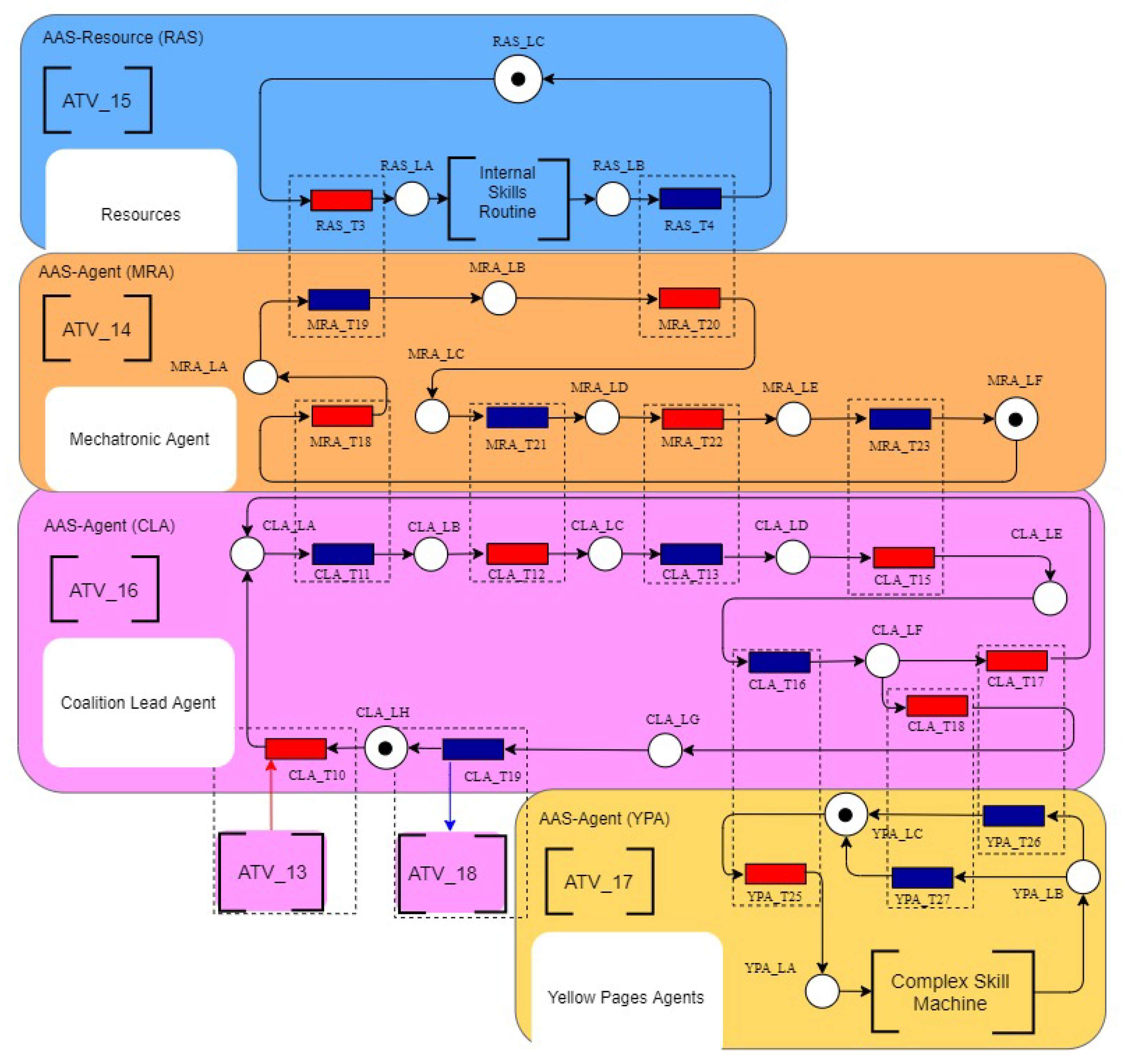
- CLA-T10 cooperate with [ATV-13]. This grouping of transitions starts after completing the activity [Preparation of Terms (MCC)], being responsible for exchanging information to “Search Skills”;
- CLA-T11 and MRA-T18, this group of activities, enables the exchange of information between the agent (CLA) and (MRA) to search for new capabilities. These transitions represent the activities [Skills Search Request] and [Skills Search Request capabilities];
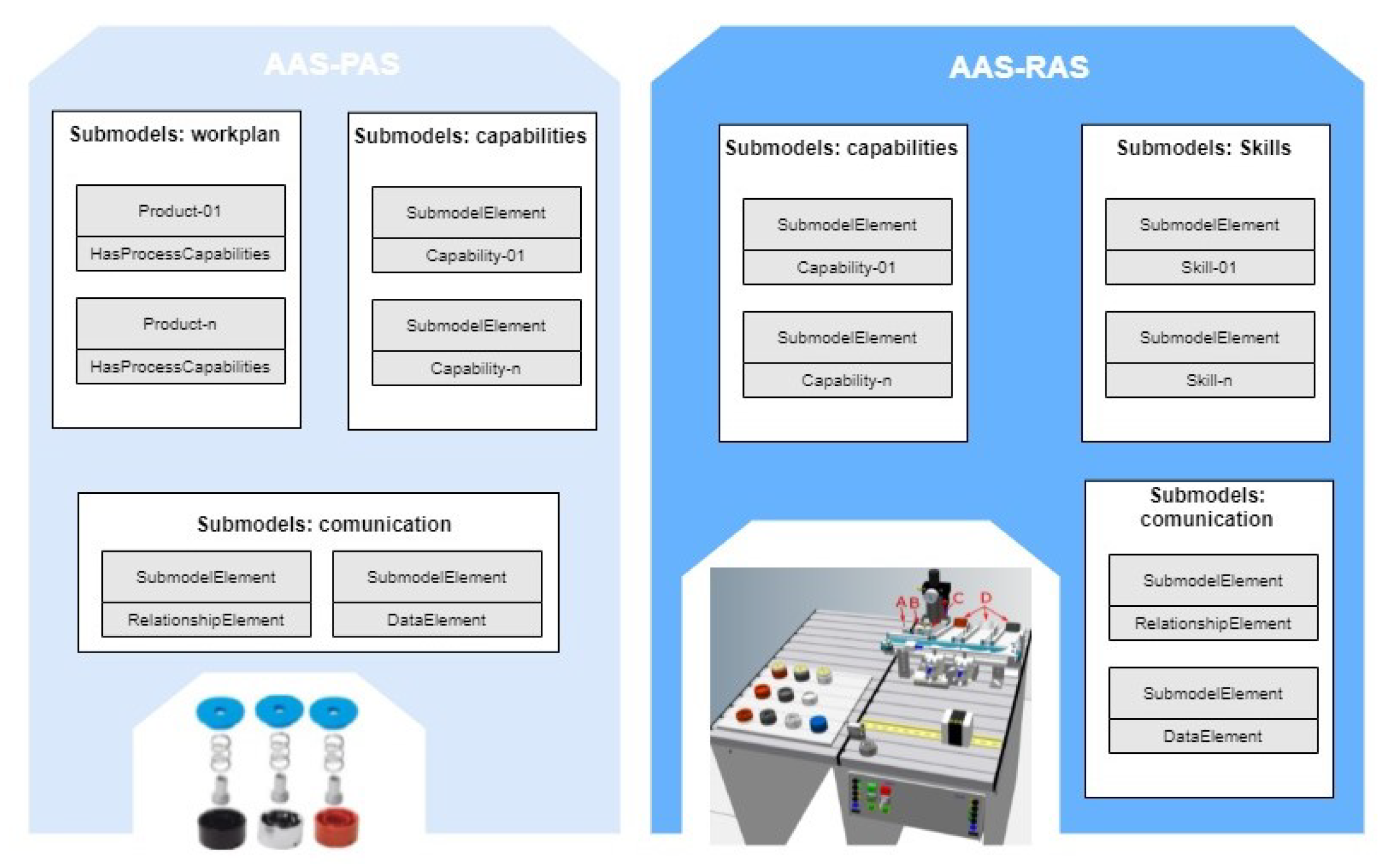
- MRA-T19 and RAS-T3, these transitions indicate a message of (MRA) with the activity [Request Capabilities in RAS] by the agent (RAS) that receives the [Skills Request];
- RAS-T4 and MRA-T20, this transition group indicates the return of (RAS) with [External Capabilities] activity to (MRA) that [receives Capabilities];
- MRA-T21 and CLA-T12, these grouping of transitions indicates the answer message from (MRA) with capabilities that execute the activity [Informs Capabilities] to the agent (CLA) that receives it through the [receives Capabilities (Skill)];
- CLA-T13 and MRA-T22, the following (CLA) internal routine is the activity [Signature of Contracts (MCC)]. The grouping of these transitions enables (CLA) to send the message [requests Signature (MCC)] to the agent (MRA) that process this information with the activity [Receive Signature Request (MCC)];
- MRA-T23 and CLA-T15, after completing the activities to adhere to the (MCC) contract. The agent (MRA) sends [Inform Contract (MCC) signed] to the agent (CLA) that enables the activity [Subscription return (MCC)];
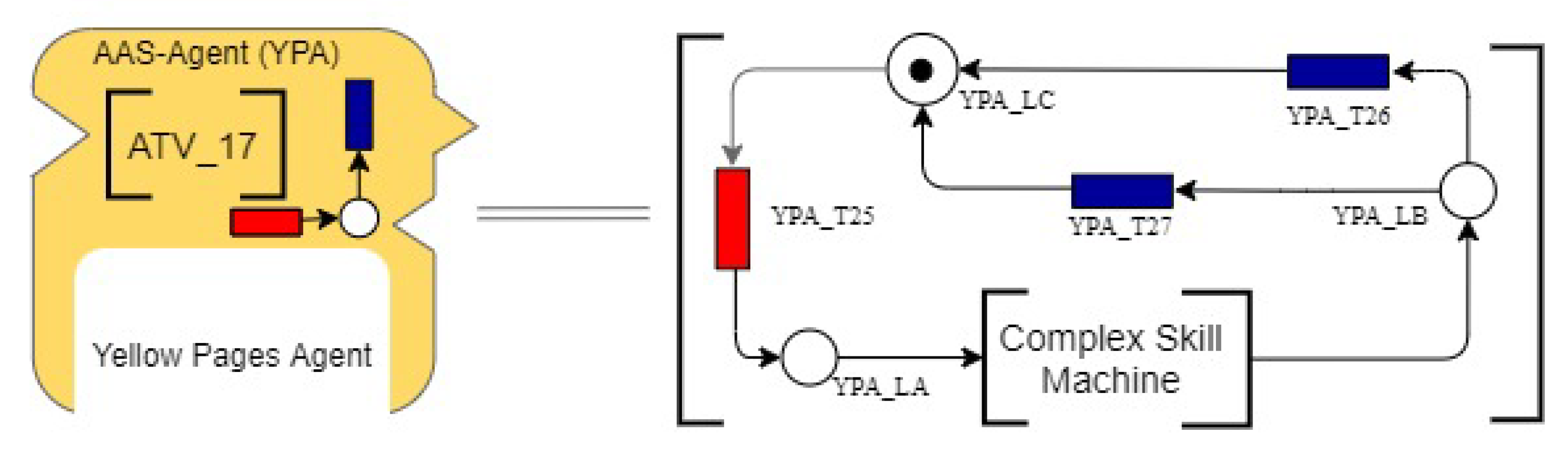
- CLA-T16 and YPA-T25, the grouping of these activities allows the exchange of messages between agent (CLA) that [Request complex Skill] to an agent (YPA) that [Receive Complex Skill Request];
- YPA-T26 and CLA-T17, after the agent (YPA) execute the [Complex Machine Skill], it enables the activity [return “Complex Skill” not found] for (CLA) that receives the message of [Does not receive complex Skill] in case of impossibility to find the Skill needed for a coalition;
- YPA-T27 and CLA-T18, in case of possibility, to conclude the [Complex Skill Machine], the agent (YPA) returns to (CLA) with the activity [return “Complex Skill” found] enabling (CLA) to receive the missing capabilities for coalition via message [Receive Complex Skill];
- CLA-T19—This transition is merged with a component in [ATV-18] that flags the [Plan Execution] for monitoring the (CLA) leader on the (MAS) plan to be accomplished;
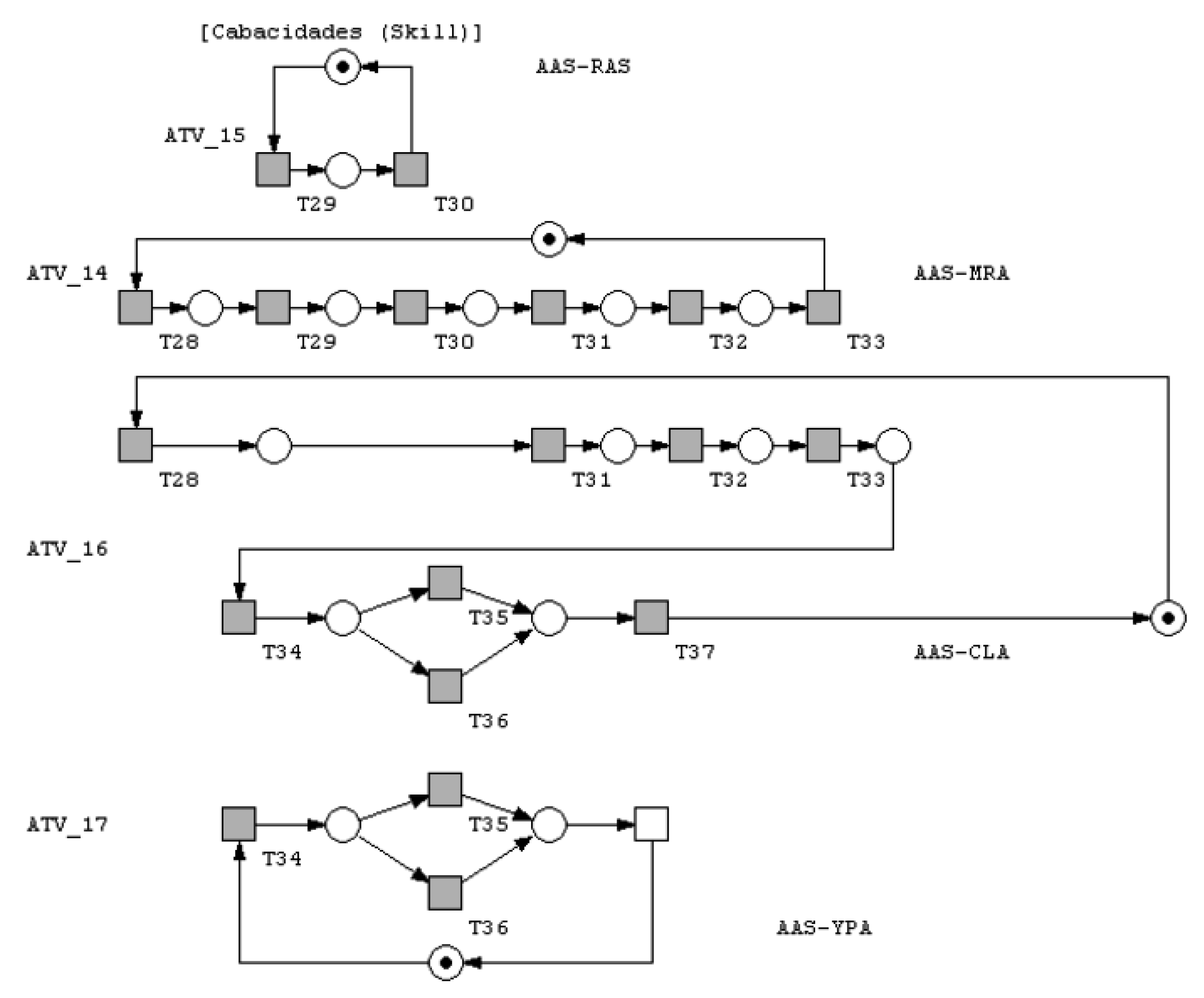
4.3. Simulation Result Using Snoopy to Validate the Effectiveness of the Procedure
4.4. Results Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Borangiu, T.; Trentesaux, D.; Thomas, A.; Leitão, P.; Barata, J. Digital transformation of manufacturing through cloud services and resource virtualization. Comput. Ind. 2019, 108, 150–162. [Google Scholar] [CrossRef]
- Bayha, A.; Bock, J.; Boss, B.; Diedrich, C.; Malakuti, S. Describing Capabilities of Industrie 4.0 Components; The ZVEI: Frankfurt am Main, Germany, 2020. [Google Scholar]
- Wagner, C.; Grothoff, J.; Epple, U.; Drath, R.; Malakuti, S.; Grüner, S.; Hoffmeister, M.; Zimermann, P. The role of the Industry 4.0 asset administration shell and the digital twin during the life cycle of a plant. In Proceedings of the 2017 22nd IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Limassol, Cyprus, 12–15 September 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Kagermann, H.; Anderl, R.; Gausemeier, J.; Schuh, G.; Wahlster, W. Industrie 4.0 im Globalen Kontext. Acatech Studie. 2016. Available online: https://www.acatech.de/wpcontent/uploads/2018/03/acatech_de_STUDIE_Industrie40_global_Web.pdf (accessed on 14 September 2021).
- Bedenbender, H.; Bentkus, A.; Epple, U.; Hadlich, T.; Hankel, M.; Heidel, R.; Woolschlaeger, M. Relationships between I4.0 Components—Composite Components and Smart Production. 2017. Available online: https://www.plattform-i40.de/IP/Redaktion/EN/Downloads/Publikation/relationships-i40-components.pdf (accessed on 20 November 2021).
- Bader, S.; Barnstedt, E.; Bedenbender, H.; Billman, M.; Boss, B.; Braunmandl, A. Details of the Asset Administration Shell Part 1—The Exchange of Information between Partners in the Value Chain of Industrie 4.0 (Version 3.0RC01). 2020. Available online: https://www.plattform-i40.de/IP/Redaktion/EN/Downloads/Publikation/Details_of_the_Asset_Administration_Shell_Part1_V3.html (accessed on 20 November 2021).
- Veiga, J.T.; Pessoa, M.A.O.; Junqueira, F.; Miyagi, P.E.; dos Santos Filho, D.J. Control of Manufacturing Systems by HMS/EPS Paradigms Orchestrating I4.0 Components Based on Capabilities. In Technological Innovation for Applied AI Systems; Camarinha-Matos, L.M., Ferreira, P., Brito, G., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 62–70. [Google Scholar]
- Veiga, J.T.; Pessoa, M.A.O.; Junqueira, F.; Miyagi, P.E.; Dos Santos Filho, D.J. Intelligent Manufacturing Systems: Self-organization in the I4.0 context. In Proceedings of the 2021 14th IEEE International Conference on Industry Applications (INDUSCON), São Paulo, Brazil, 15–18 August 2021; pp. 153–160. [Google Scholar] [CrossRef]
- Onori, M.; Lohse, N.; Barata, J.; Hanisch, C. The IDEAS project: Plug & produce at shop-floor level. Assem. Autom. 2012, 32, 124–134. [Google Scholar]
- Peixoto, J.A.; Oliveira, J.A.B.; Rocha, A.D.; Pereira, C.E. The Migration from Conventional Manufacturing Systems for Multi-Agent Paradigm: The First Step. In Technological Innovation for Cloud-Based Engineering Systems; Camarinha-Matos, L.M., Baldissera, T.A., Di Orio, G., Marques, F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 111–118. [Google Scholar]
- Barata, J.; Camarinha-Matos, L.M. Coalitions of manufacturing components for shop floor agility-the CoBASA architecture. Int. J. Netw. Virtual Organ. 2003, 2, 50–77. [Google Scholar] [CrossRef]
- Frei, R.; Barata, J.; Serugendo, G. A complexity theory approach to evolvable production systems. In Proceedings of the 3rd International Workshop on Multi-Agent Robotic Systems in Conjunction with ICINCO, Angers, France, 9–12 May 2007; pp. 44–53. [Google Scholar]
- Dias, J.; Vallhagen, J.; Barbosa, J.; Leitão, P. Agent-based reconfiguration in a micro-flow production cell. In Proceedings of the 2017 IEEE 15th International Conference on Industrial Informatics (INDIN), Emden, Germany, 24–26 July 2017; pp. 1123–1128. [Google Scholar] [CrossRef] [Green Version]
- Veiga, J.T.; Pessoa, M.A.; Junqueira, F.; Miyagi, P.E.; dos Santos Filho, D.J. Controle de Sistemas de Manufatura Distribuídos no contexto da Indústria 4.0. In Proceedings of the Congresso Brasileiro de Automática—CBA, São Paulo, Brasil, 23–26 November 2020; Volume 2. (In Portuguese). [Google Scholar]
- Chakravorti, N.; Rahman, M.M.; Sidoumou, M.R.; Weinert, N.; Gosewehr, F.; Wermann, J. Validation of PERFoRM reference architecture demonstrating an application of data mining for predicting machine failure. Procedia CIRP 2018, 72, 1339–1344. [Google Scholar] [CrossRef]
- Trunzer, E.; Calà, A.; Leitão, P.; Gepp, M.; Kinghorst, J.; Lüder, A.; Schauerte, H.; Reifferscheid, M.; Vogel-Heuser, B. System architectures for Industrie 4.0 applications. Prod. Eng. 2019, 13, 247–257. [Google Scholar] [CrossRef] [Green Version]
- Mindas, M.; Bednar, S. Mass customization in the context of industry 4.0: Implications of variety-induced complexity. In Advanced Industrial Engineering; Wydawnictwo Fundacji Centrum Nowych Technologii: Bielsko-Biała, Poland, 2016; pp. 21–38. ISBN 978-83-927531-9-3. [Google Scholar]
- Pisching, M.A.; Pessoa, M.A.; Junqueira, F.; Miyagi, P.E. PFS/PN Technique to Model Industry 4.0 Systems Based on RAMI 4.0. In Proceedings of the 2018 IEEE 23rd International Conference on Emerging Technologies and Factory Automation (ETFA), Turin, Italy, 4–7 September 2018; Volume 1, pp. 1153–1156. [Google Scholar] [CrossRef]
- Pisching, M.A.; Pessoa, M.A.; Junqueira, F.; dos Santos Filho, D.J.; Miyagi, P.E. An architecture based on RAMI 4.0 to discover equipment to process operations required by products. Comput. Ind. Eng. 2018, 125, 574–591. [Google Scholar] [CrossRef]
- Miyagi, P.E.; Hasegawa, K.; Takahashi, K. A programming language for discrete event production systems based on production flow schema and mark flow graph. Trans. SICE 1988, 24, 183–190. [Google Scholar] [CrossRef] [Green Version]
- Heiner, M.; Herajy, M.; Liu, F.; Rohr, C.; Schwarick, M. Snoopy—A Unifying Petri Net Tool. In Application and Theory of Petri Nets; Haddad, S., Pomello, L., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 398–407. [Google Scholar]
- Gaedicke, L.; Guedes, G.; da Silva, J.P. MAS-ML Uma Linguagem para Modelagem de Sistemas Multi-Agentes: Uma Análise do Estado da Arte por Meio de uma Revisão Sistemática (in Portuguese); Anais da II Escola Regional de Engenharia de Software; SBC: Porto Alegre, Brasil, 2018; pp. 41–48. [Google Scholar]
- Pessoa, M.A.O.; Pisching, M.A.; Yao, L.; Junqueira, F.; Miyagi, P.E.; Benatallah, B. Industry 4.0, How to Integrate Legacy Devices: A Cloud IoT Approach. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 2902–2907. [Google Scholar] [CrossRef]
- Cavalieri, S.; Salafia, M.G. Asset Administration Shell for PLC Representation Based on IEC 61131–3. IEEE Access 2020, 8, 142606–142621. [Google Scholar] [CrossRef]
- Frankó, A.; Vida, G.; Varga, P. Reliable Identification Schemes for Asset and Production Tracking in Industry 4.0. Sensors 2020, 20, 3709. [Google Scholar] [CrossRef] [PubMed]
- Bader, S.R.; Maleshkova, M.; Lohmann, S. Structuring reference architectures for the industrial internet of things. Future Int. 2019, 11, 151. [Google Scholar] [CrossRef] [Green Version]
- González, I.; Calderón, A.J.; Figueiredo, J.; Sousa, J. A literature survey on open platform communications (OPC) applied to advanced industrial environments. Electronics 2019, 8, 510. [Google Scholar] [CrossRef] [Green Version]
- Wollschlaeger, M.; Sauter, T.; Jasperneite, J. The future of industrial communication: Automation networks in the era of the internet of things and industry 4.0. IEEE Ind. Electron. Mag. 2017, 11, 17–27. [Google Scholar] [CrossRef]
- Xu, R.; Chen, Y.; Blasch, E.; Chen, G. Blendcac: A smart contract enabled decentralized capability-based access control mechanism for the iot. Computers 2018, 7, 39. [Google Scholar] [CrossRef] [Green Version]
- Barata, J.; Camarinha-Matos, L.; Onori, M. A multiagent based control approach for evolvable assembly systems. In Proceedings of the INDIN ’05, 2005 3rd IEEE International Conference on Industrial Informatics, Perth, Australia, 10–12 August 2005; pp. 478–483. [Google Scholar] [CrossRef]
- Ribeiro, L.; Barata, J.; Onori, M.; Hanisch, C.; Hoos, J.; Rosa, R. Self-organization in automation—The IDEAS pre-demonstrator. In Proceedings of the IECON 2011—37th Annual Conference of the IEEE Industrial Electronics Society, Melbourne, Australia, 7–10 November 2011; pp. 2752–2757. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Project | Paradigm | Main Aspects |
|---|---|---|---|
| [2] | RAMI4.0 | I4.0 | Guidelines for AAS capabilities |
| AAS | SOA | based in I4.0 context | |
| [3] | DT | I4.0 | Plant Life Cycle, Digital Twin |
| I4.0C | DOA | data set of AAS, data-objects | |
| [6] | RAMI4.0 | I4.0 | Standardized Models, Architecture |
| AAS | and references for I4.0 context | ||
| [7] | RAMI4.0 | HMS | Framework orchestrating AAS |
| AAS | EPS | Intelligent Control—MAS, Skill Coalition | |
| [8] | RAMI4.0 | I4.0 | Self-organization in complex |
| IADE | EAS | systems, multi-agent, architecture | |
| CoBASA | MAS | capability checking and coalition | |
| [13] | PERFoRM | MAS | Generic architecture, reconfiguration |
| SOA | legacy systems, distributed services | ||
| IoT layers based and modularity | |||
| [5] | RAMI4.0 | I4.0 | Granularity abstraction for representation |
| AAS | SOA | of functionalities, I4.0, DIN SPEC 91345 | |
| [30] | CoBASA | EPS | Guidelines for MAS Control |
| MAS | mechatronic virtual entities | ||
| Skill ontology coalitions, contracts | |||
| [9,31] | FP7 | EPS | Self-organization, self-ability |
| IDEIAS | MAS | tolerance to disturbances, MAS architecture |
| Component | Main Activities Description |
|---|---|
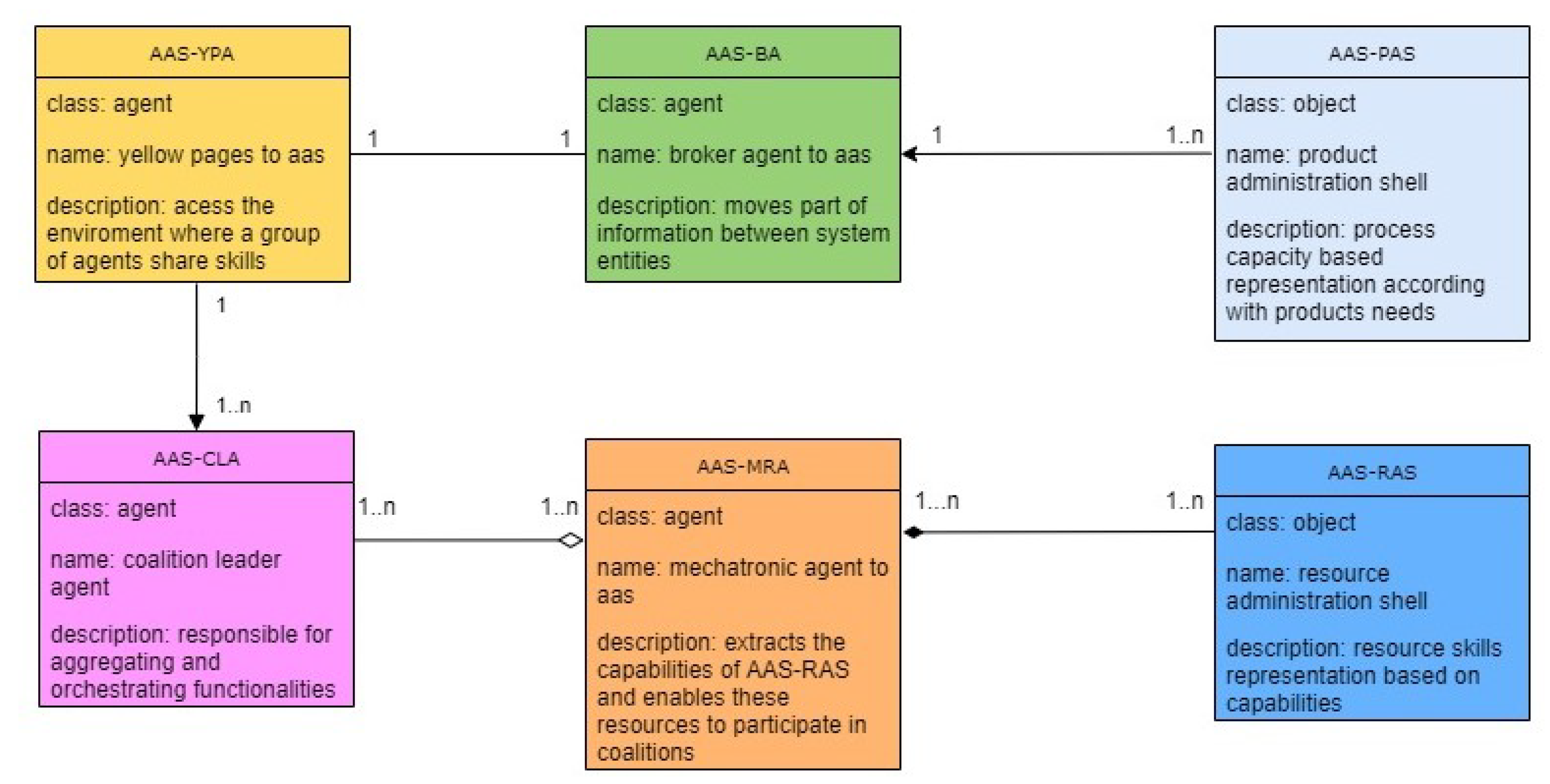
| AAS-PAS—(Product Administration Shell) | [01—New Consortium Order] |
| AAS-BA—(Agent Broker | [02—Order Publication]; |
| Administration Shell Broker) | [05—Identification of Capability IDs]; |
| [11—Iterations for Coalitions of (MCC)]. | |
| AAS-YPA—(Agent Yellow pages | [03—Definition of Terms (CAC)]; |
| Administration Shell) | [04—Search for Candidate Credentials]; |
| [09—Intention of Adhesion to (CAC)]; | |
| [10—Contracts (MCC) for | |
| Execution of the (CAC)]; | |
| [17—Complex Skill Mechanism]. | |
| AAS-MRA—(Agent Mechatronic Resource | [06—Capabilities ID Queries], |
| Administration Resource Shell) | [08—Register the (CAC) Adhesion]; |
| [13—Adhesion to Coalitions]; | |
| [14—Search for Resource Capabilities]; | |
| AAS-RAS—(Resource Administration Shell) | [07—External Capabilities IDs]; |
| [15—External Capabilities (Skill)] | |
| AAS-CLA—(Agent Coalition Leader | [12—Member Search for (MCC)]; |
| Administration Shell) | [16—Mechanism of Coalitions]. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Veiga, J.T.; Pessoa, M.A.O.; Junqueira, F.; Miyagi, P.E.; dos Santos Filho, D.J. A Systematic Modelling Procedure to Design Agent-Oriented Control to Coalition of Capabilities—In the Context of I4.0 as Virtual Assets (AAS). Computers 2021, 10, 161. https://0-doi-org.brum.beds.ac.uk/10.3390/computers10120161
Veiga JT, Pessoa MAO, Junqueira F, Miyagi PE, dos Santos Filho DJ. A Systematic Modelling Procedure to Design Agent-Oriented Control to Coalition of Capabilities—In the Context of I4.0 as Virtual Assets (AAS). Computers. 2021; 10(12):161. https://0-doi-org.brum.beds.ac.uk/10.3390/computers10120161
Chicago/Turabian StyleVeiga, Jackson T., Marcosiris A. O. Pessoa, Fabrício Junqueira, Paulo E. Miyagi, and Diolino J. dos Santos Filho. 2021. "A Systematic Modelling Procedure to Design Agent-Oriented Control to Coalition of Capabilities—In the Context of I4.0 as Virtual Assets (AAS)" Computers 10, no. 12: 161. https://0-doi-org.brum.beds.ac.uk/10.3390/computers10120161