Collaborative Content Downloading in VANETs with Fuzzy Comprehensive Evaluation


1
Colleage of Information Science and Engineering, Yanshan University, Qinhuangdao 066004, China
2
Department of Mathematical Information Technology, University of Jyväskylä, P.O. Box 35, FIN-40014 Jyväskylä, Finland
*
Author to whom correspondence should be addressed.
Symmetry 2019, 11(4), 502; https://0-doi-org.brum.beds.ac.uk/10.3390/sym11040502
Submission received: 7 February 2019
/
Revised: 29 March 2019
/
Accepted: 31 March 2019
/
Published: 6 April 2019
(This article belongs to the Special Issue Integral Transformations, Operational Calculus and Their Applications)
Abstract
:Vehicle collaborative content downloading has become a hotspot in current vehicular ad-hoc network (VANET) research. However, in reality, the highly dynamic nature of VANET makes users lose resources easily, and the transmission of invalid segment data also wastes valuable bandwidth and storage of the users’ vehicles. In addition, the individual need of each customer vehicle should also be taken into consideration when selecting an agent vehicle for downloading. In this paper, a novel scheme is proposed for vehicle selection in the download of cooperative content from the Internet, by considering the basic evaluation information of the vehicle. To maximize the overall throughput of the system, a collaborative content downloading algorithm is proposed, which is based on fuzzy evaluation and a customer’s own expectations, in order to solve the problems of agent vehicle selection. With the premise of ensuring successful downloading and the selection preferences of customer vehicles, linear programming is used to optimize the distribution of agent vehicles and maximize customer’s satisfaction. Simulation results show that the proposed scheme works well in terms of average quality of service, average bandwidth efficiency, failure frequency, and average consumption.
1. Introduction
With the rapid development of the network, the demand of the network extends to all aspects of people’s lives. As a platform, which provides a specific network service, the vehicular ad-hoc network (VANET) brings new technical challenges to the transmission of information while providing information services, including: how to improve the efficiency of the vehicle network and how to meet the continuous improvement of the users’ needs [1,2].
Scholars have discussed different ways to modify VANET, in order to improve the performance of vehicle networking and meet the growing demand of users. In terms of enhancing the performance of the vehicle-to-infrastructure (V2I) connection in VANET, the possibility of constructing a network with the TV white space geolocation database for vehicle networking was discussed by some scholars. Then vehicular communication architectures were proposed to mitigate the resulting high spectrum demands and provide vehicular connectivity with wider communication range, higher transmission rate, and lower data transfer cost [3,4]. By analyzing the end-to-end transmission performance from individual vehicles to a road side unit (RSU), an efficient message routing scheme was put forward to balance the data traffic across the network and improve the network throughput [5]. In Reference [6], a collaborative download algorithm, namely maximum throughput and minimum delay collaborative download (MMCD) was proposed, which minimizes the average transmission delay of each user’s request and maximizes the number of packets downloaded from an RSU. Reference [7] mainly studies the cost of minimizing the download of a hybrid vehicle ad hoc network, and proposes the basic satisfaction algorithm (BMA) and heuristic algorithm (TSA) to solve the huge download delay caused by vehicle mobility in VANET. In order to solve the frequent collision among agent vehicles and customer vehicles, a transmission scheduling method was put forward to adjust the relationship between link routing and transmission time [8].
In terms of enhancing the vehicle-to-vehicle (V2V) collaborative download performance in VANET: ECDS gives an efficient collaborative downloading solution to popular content distribution in urban vehicle networks. Furthermore, a cross-domain relay selection strategy was proposed to build a peer-to-peer (P2P) network, which helps strengthen information dissemination [9]. In Reference [10], to solve the problems of popular content distribution (PCD) in a highway scene, the author modeled the problem as a coalition formation game with transferable utilities, and proposed a coalition formation algorithm that converges into a Nash-stable partition, adapting to environmental changes as a result of the VANET’s rapid and unpredictable topological changes. In Reference [11], the design incentive mechanism is employed to propose a collaborative downloading method, which encourages cooperation between vehicles and helps users effectively obtain the required resources. The author designed a server-assisted key management scheme that promotes cooperation and ensures fairness and efficiency. In the scheme, vehicles with common interests form a cluster and take turns as the cluster head, which directly downloads data packets from the Internet and V2V shares the content with surrounding vehicles [12]. A delicate linear cluster formation scheme is proposed and applied to significantly enhance the probability of a successful file download in VANET [13]. In Reference [14], the author proposed a security incentive program (SIRC) to achieve reliable, fair, and secure collaborative downloading in VANET. SIRC stimulates vehicle users to help each other download and forward packets, encourages cooperation between users, and also punishes malicious vehicles to ensure the safety of vehicles. Efficient privacy-preserving cooperative data downloading for value-added services is used to solve the problems of limited communication range and high dynamics, which gains the access control in VANET [15].
The methods of improving the performance of the vehicle network are also discussed from other aspects. Digital fountain code (DFC) is proposed and applied in the field of cooperative downloading for VANET. As long as enough data packets encoded by hierarchical fountain code are available, the client can recover the raw data and avoid data transmission interruption [16,17]. In Reference [18], a fuzzy logic-based resource management (FLRM) scheme was proposed, and the lifetime of each storage resource was defined by the proposed fuzzy logic-based popularity evaluation algorithm.
1.1. Related Work
The agent vehicle selection method and vehicle distribution scheme are important links to achieve collaborative downloading. A fuzzy logic-based cooperative file transfer scheme (FL-CFT) was proposed to optimally select relays to help transfer the file and ensure the file integrity, in which the relative velocity, distance, and predicted connection time among vehicles were considered [19]. To solve the problems of the low utilization of spatiotemporal resources in DA and an unbalanced service of cooperative downloading, a balanced cooperative downloading method was proposed, which dynamically uses the Euclidean and Manhattan distances in order to select the vehicles according to the number of clients [20]. In Reference [21], a k-hop bandwidth aggregation scheme was proposed to select agent vehicles, to help download and forward videos and more effectively send video streams to requesters through DSRC VANET. In Reference [22], a preferential response incentive mechanism (PRIM) was proposed to motivate vehicles to participate in collaborative downloading, and game theory was used to analyze a vehicle’s behavior in order to find the optimal strategy for each collaborator, reduce repeated downloads, and promote V2I cooperation to reduce delays and expenses. In Reference [23], a security collaboration data download framework for paid services in VANET was proposed. An application layer data sharing protocol was developed to coordinate vehicle data sharing according to its location. The seed screening scheme SIEVE was proposed in Reference [24], using users’ interest and near-term contact predictions to select the best vehicle node (vehicle) to download the object (via the cellular network) and propagate the object (via the RSU). In order to effectively characterize users’ preferences and network performance, previous authors use parameters such as energy efficiency, signal intensity, network cost, delay, and bandwidth to construct utility functions. Then, these utility functions and multi-criteria utility theory are used to construct an energy-efficient network selection approach and a joint multi-criteria utility function for network selection of the appropriate access network [25].
1.2. Motivation and Contributions
In fact, the goal of a cooperative downloading method is to ensure more efficient data transmission, provide balanced services, and meet the requirements of all customers on the agent vehicles, so that the customers’ cooperative unloading requirements can be satisfied. Based on the ideas above, this paper proposes a vehicle selection algorithm for the vehicle network agent based on fuzzy comprehensive evaluation. This algorithm takes the basic parameters of the customer vehicle, the agent vehicle, and the relationship between them into account, and improves the average throughput and customer satisfaction under the condition of satisfying a customer vehicle’s information data requests. Compared with the previous articles, the contributions of this paper are in four aspects:
- We provide a fuzzy evaluation method based on the relationship between the agent vehicle and the customer vehicle, and evaluate the agent vehicle synthetically. In our opinion, we can judge whether the vehicle is suitable for cooperation by its relevant attributes. These attributes include computing capability, bandwidth, unit cost, credibility, and path consistency between vehicles, which are meaningful data for vehicle selection. Therefore, using this information as the evaluation factor for the fuzzy comprehensive evaluation, corresponding agent vehicles for each customer vehicle are scored, and the vehicles with higher scores are selected as the priority.
- In order to satisfy the requests of more customer vehicles and maximize resource utilization, this paper proposes an agent vehicle distribution strategy based on the maximization of service quality. Our approach allocates a certain number of agent vehicle resources to each customer vehicle, and takes the bandwidth limitation of the agent vehicle into consideration, so as to select the most suitable agent vehicle for the customer vehicle and maximize overall resource utilization.
- In a simulation, the performance of the proposed algorithm is compared with other schemes. The simulation results show that the proposed algorithm can gain significant performance achievements, which demonstrates the superiority of the scheme.
- By analyzing the fuzzy relationship between multiple constraints on the target, the fuzzy comprehensive evaluation method quantifies and unifies the relationship as an index to realize vehicle selection. This method woks well in dealing with the problems of fuzzification that are constrained by many factors. Additionally, it can be used as a reference for the solutions of multi-factor constraint model problems such as mobile vehicle network selection problems, vehicle routing problems in complex environments, and so on.
The organization of this paper is as follow. Section 2 describes the system model used by this scenario. Section 3 explains, in detail, the vehicle network cooperation content downloading method, based on fuzzy comprehensive evaluation, proposed in this paper. Section 4 shows our simulation results and discussion. Finally, Section 5 summarizes the method of this paper and points out the future work.
2. System Model
In this section, the model is first introduced, and some parameters are defined, including the vehicle evaluation index and the format of the data packet.
2.1. System Model
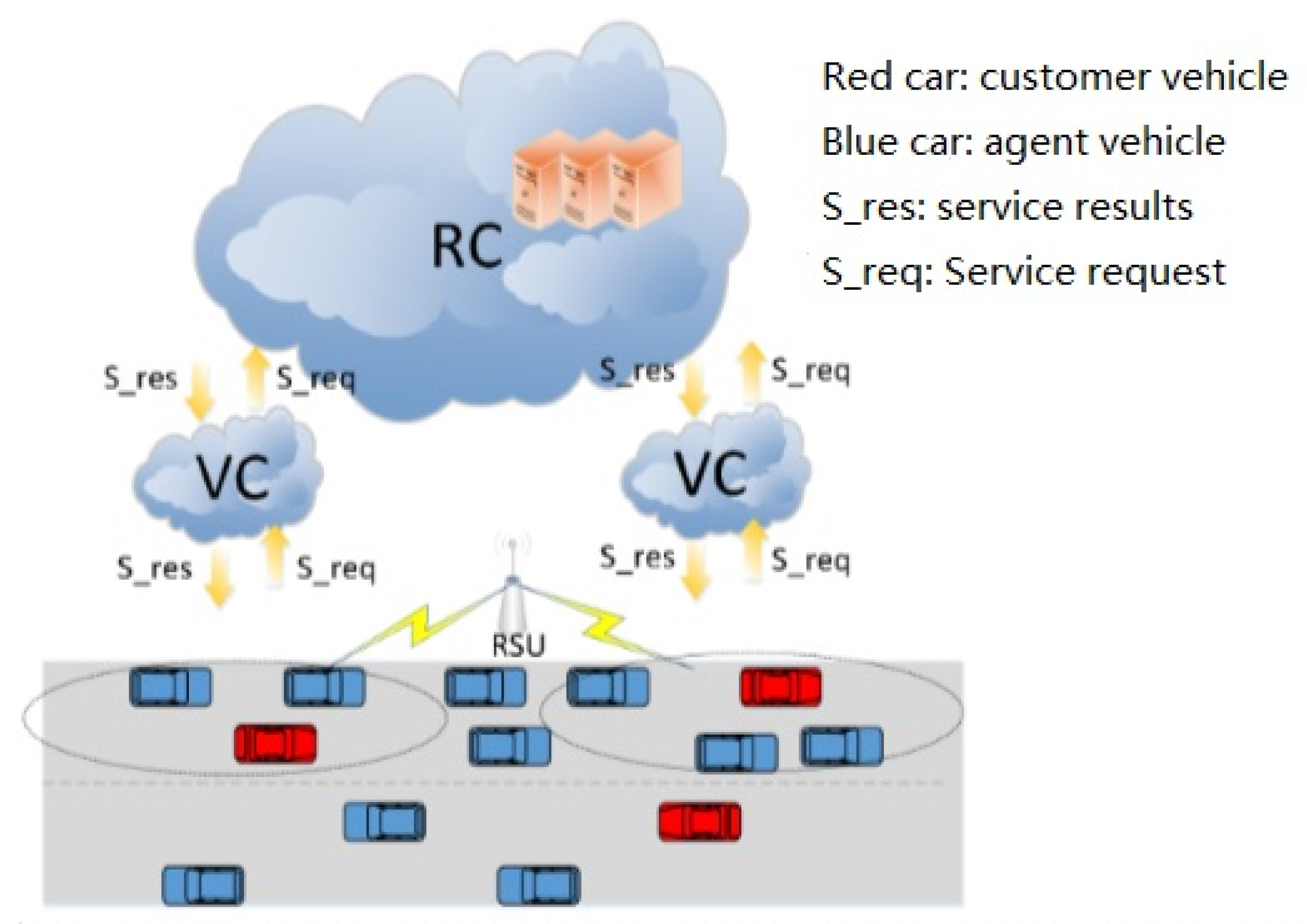
In the system model shown in Figure 1, the vehicles are grouped as customer vehicles and agent vehicles. Customer vehicles send download requests to the local server (RC), and agent vehicles are responsible for helping them download the requested content. The customer and agent vehicles together form a VANET.
When passing by an RSU, a vehicle in the vehicle cloud downloads the response file (vehicle-to-infrastructure, V2I); when leaving the RSU affected area, the vehicles in the VANET share the downloaded files (vehicle-to-vehicle, V2V). The V2I and V2V process forms a circulation, and many such circulations have to be gone through to complete the download of a large file.
In this paper, we make the following assumptions:
- The customer vehicle which requests cooperation, selects an agent vehicle only once every period. When the agent vehicle is selected, its map route must be consistent with the customer vehicle.
- The local server can obtain the vehicle’s navigation information (that is, the driving route of each vehicle on a map), in order to allocate an agent vehicle traveling on the same road section as the customer vehicle and reduce the waste of resources. The vehicle uploads any relevant information to the local server. The local server selects the agent vehicle for the customer vehicle according to the scheme proposed herein.
- On the basis of content consistency, the local server counts the request information of the customer vehicle and the service information of the agent vehicle. There are two forms of vehicle computing capability. The first form is collaborative computing. In this case, the computing capability of the agent vehicle is determined by the hardware of the vehicle itself, which represents the total amount of data that the agent vehicle needs to receive and send in the service. In the second form, the request of the customer vehicle is content downloading. It is set that the storage and removal of files in the vehicle are in chronological order. In this case, the computing capability of the customer vehicle is a request for the files that have not been downloaded yet, which can be part of a file or an entire file. The computing capability of the agent vehicle is the part of the file reserved in the current storage, which can be part of the file or the entire file. In this paper, the method for obtaining data from the agent vehicle will not be discussed and we assume that the agent vehicle has had the corresponding computing capability before providing services to the customer vehicle.
Failure of a customer vehicle’s request will occur due to the following:
- If there is only one agent vehicle for more than one customer vehicle, the selected agent vehicle cannot serve more than one vehicle, and it will be allocated to the customer vehicle with the greatest satisfaction. The other customer vehicles’ requests will fail.
- According to Algorithm 1, a request fails if the customer vehicle cannot find an agent vehicle that meets its requirements.
This paper mainly studies the content downloading through V2V in VANET, and focuses on how to choose the best cooperators for a customer vehicle. According to the relevant data of the vehicles, under the premise of satisfying the cooperation standard expected by the customer vehicle, the overall rating of the agent vehicle is maximized, so each customer obtains a satisfactory downloading experience.
2.2. Definitions
In order to record the data set, the packet format for the customer vehicle (CV) and the agent vehicle (AV) are defined respectively as:
- Request package of customer vehicle:
- –
- CV-ID: Customer vehicle’s ID;
- –
- CV-computing: Computing capability of customer vehicle request;
- –
- CV-bandwidth: Customer vehicle’s bandwidth;
- –
- CV-path: The travel route of the customer vehicle in the process of the data request;
- –
- CV-position: Customer vehicle’s position;
- –
- CV-speed: Customer vehicle’s speed;
- Service package of agent vehicle:
- –
- AV-ID: Agent vehicle’s ID;
- –
- AV-computing: Agent vehicle’s computing capability;
- –
- AV-bandwidth: Agent vehicle’s bandwidth;
- –
- AV-path: The travel route of the agent vehicle in the process of the data service;
- –
- AV-credit: Agent vehicle’s credit;
- –
- AV-position: Agent vehicle’s position;
- –
- AV-cost: Service cost of agent vehicle in unit time;
- –
- AV-speed: Agent vehicle’s speed;
- The format of the reply message of the local server is as follow:
- –
- Server-ID: ID of the local server that communicates with the current vehicle;
- –
- Reply (N = AV-ID): if the reply message is 0, the local server finds the agent vehicle. If the reply message is a series of numbers (which are defined as positive integers), they represent the IDs of all the agent vehicles assigned to it by the local server;
Therefore, the vehicle and the local server use the information as an evaluation factor in the communication process to complete the evaluation of the vehicle. A comprehensive evaluation index system is designed, as shown in Table 1.
The computing capability is determined by the customer vehicle’s requirement data and agent vehicle’s service data. Bandwidth is determined by the hardware properties of the vehicle. Unit cost is the remuneration to be paid per unit time when the service is provided by the agent vehicle. Credibility is the score given on cooperation in the vehicle’s historical records, which is evaluated in VANET. If it can serve the customer vehicle very well every time, the score will be high; if there is a malicious termination of the cooperation, the behavioral reputation value will be correspondingly reduced. Path consistency represents the proportion of path that maintains communication between an agent and customer vehicle in the total path.
In addition, due to the mobility of the vehicle, datagrams will be updated every time period to ensure good transmission. In the next section, the vehicle selection method based on fuzzy comprehensive evaluation will be introduced in detail.
3. Vehicle Network Collaborative Content Downloading Method Based on Fuzzy Comprehensive Evaluation
In this section, we describe the specific method for the local server to select an agent vehicle for a customer vehicle, in detail. The fuzzy comprehensive evaluation model is also introduced to make a fuzzy comprehensive evaluation of the factors affecting the vehicle selection in agent vehicle unloading. The choice of vehicles tends to be optimal.
The detailed communication process of finding agent vehicles is as follow:
- Several customer vehicles send request packets to a local server. A request packet contains the requirements for an agent vehicle and the relevant information of the customer vehicle itself.
- After the local server receives the message, it uses the fuzzy comprehensive evaluation method proposed in this paper to analyze the request packet of the customer vehicle and the service packet of an agent vehicle. Then it forms the distribution plan of the agent vehicle for the customer vehicle, and sends a response message back to them.
- Response message. If the message is 0, it means that the local server did not find an agent vehicle and the customer vehicle needs to wait for the next assignment. If the message is a series of numbers (which are defined as positive integers, indicating the IDs of all the agent vehicles assigned by the local server), it means that the distribution of agent vehicles was successful, and the local server notifies the agent vehicle to serve the corresponding customer vehicle according to the allocation plan.
- After the entire communication is over, the local server records the evaluation of the agent vehicle, to update the credibility of the agent vehicle. A penalty mechanism is established to punish a vehicle which is rated poorly by the customer vehicle in this cooperation. A punished vehicle is unable to participate in the next cooperation and cannot obtain the expected rewards.
This section mainly evaluates objective ratings and customers’ satisfaction for agent vehicles in the decision domain based on certain fuzzy constraints. Agent vehicles with higher scores in comprehensive evaluation should be given priority, while those with lower scores should be given a second thought, when selecting vehicles based on the demand.
3.1. Pre-Selection of Agent Vehicles
To find an appropriate agent vehicle for the customer vehicle from a large number of vehicles, in order to meet their information requests in the process of routing, we need to establish an information selecting mechanism. In the mechanism, the relationships between a customer vehicle’s and an agent vehicle’s information are compared and analyzed, to meet the customer’s data requests. Alternative vehicles should meet the following requirements:
- Computing capability c: Computing capability is the main content of requests for customer vehicles. For the agent vehicle, it decides whether it can serve the customer vehicle or not. Computing capability provided by the agent vehicle j should be better than or equal to the computing capability requested by the customer vehicle i; so as to meet the demand of the customer vehicle:
- Bandwidth b: Bandwidth determines the fluency of a customer vehicle’s data request. The bandwidth provided by the agent vehicle j should be better than or equal to the bandwidth requested by the customer vehicle i, so as to meet the need of the customer vehicle:
- Agent vehicle j should satisfy customer requests for computing capability within the time of collaboration between the two vehicles. is the effective distance between the customer and agent vehicles, and if the distance between them exceeds , then the connection will fail. L is the path length. is the average speed of the customer vehicle. is the average driving speed of the agent vehicle. Thus:
- Path consistency determines the time length of the service that a customer vehicle obtains from the agent vehicle. It indicates whether the customer vehicle can get complete service from the agent vehicle or not. The path consistency is calculated to express the ratio of the effective signal path to the whole path when the agent vehicle provides data service to the customer vehicle:
Based on the requirements above, we filter the agent vehicles according to Algorithm 1, and record the information of the selected agent vehicles for each customer vehicle.
| Algorithm 1 Attaining the Available Agent Vehicle List |
| Input: Customer vehicle request package; agent vehicle service package; signal effective distance ; path length L; Output: Available agent vehicle (AV) list and path consistency , for each customer vehicle
|
3.2. Comprehensive Evaluation of Customer Satisfaction
3.2.1. The Determination of the Domain and Various Factors of Agent Vehicles:
Based on the illustration above, the factor domain of agent vehicles is recorded as: ,where is the computing capability; is the bandwidth; is the unit cost; is the credibility; is the path consistency;
Among them, each factor belongs to a different domain, i.e.,
The local server divides the data sets of factors and into three categories: low, medium, and high. These are represented by and , respectively, and the level domain of each factor is , which corresponds to the numerical values , in order.
If the fuzzy experiment determines the first division of the factor on the domain , one pair can be determined for each division:, where is the demarcated point between and and is the demarcated point between and .
On the contrary, if is given, the mapping e is also determined, and are separated, thus the fuzzy concept is clarified.
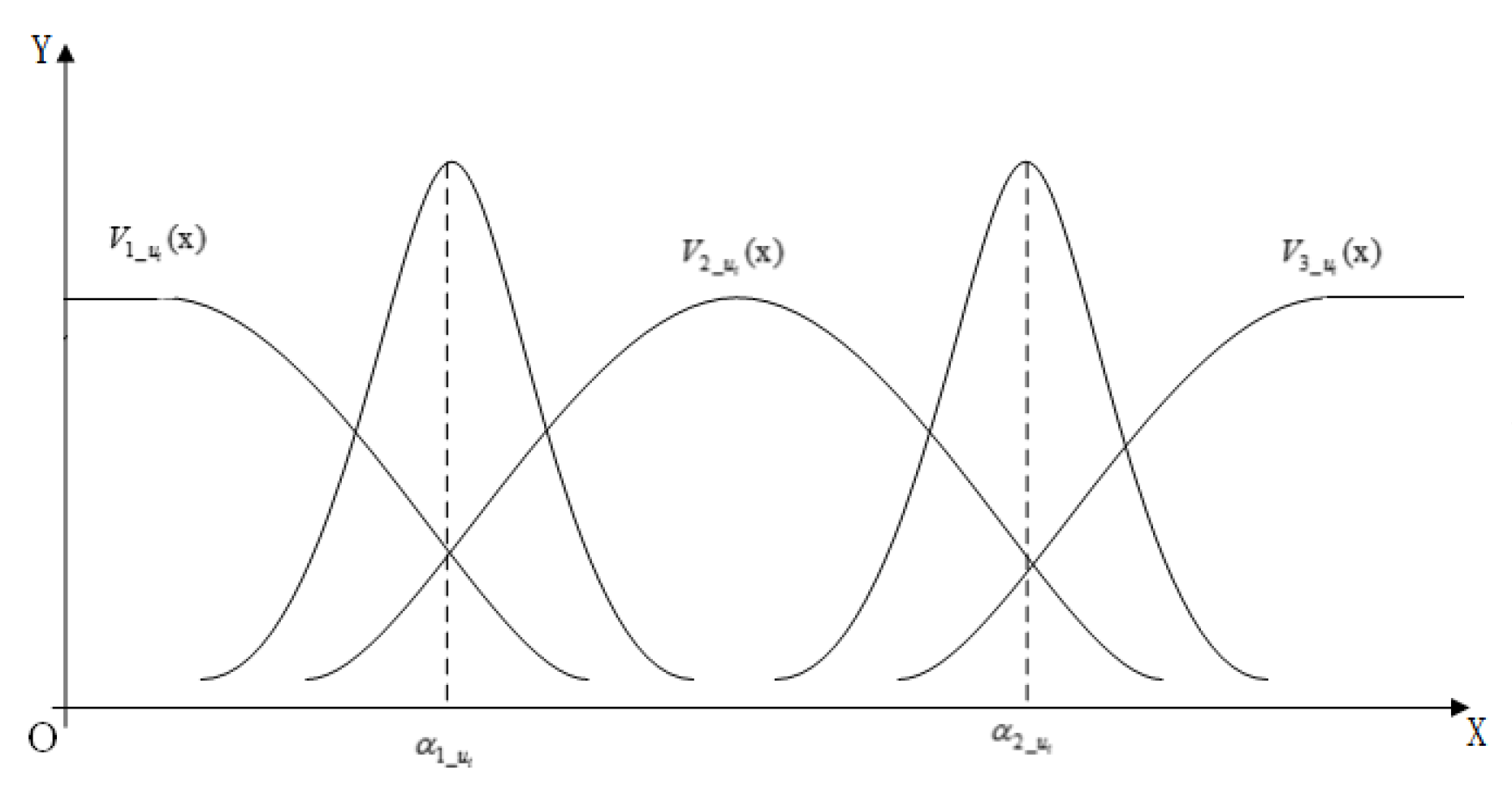
The interval of is a random interval, and so and are random variables. They follow characteristic normal distributions, as shown in Figure 2, namely: ;
Based on the definition of each factor, the values and are determined.
For factor and (i.e., computing capability, bandwidth, credibility, and path consistency), the bigger they are, the better it is for the vehicle cooperative downloading. Thus they are defined as:
For factor (unit cost), the smaller the better in consideration of a user’s benefits. Thus, they are defined as:
In order to make the distribution of demarcated points relatively centralized:
3.2.2. Determination of Membership Functions
The membership function of factors with the three levels and is determined by the three division method. The three division method is a fuzzy statistical method that determines the membership function with three levels of fuzzy concepts. The basic principles of this method are as follow.
From above, we know that the partition of the factor on the universe obeys a normal distribution: obeys , and obeys .
Furthermore, the number of determines the mapping , which is:
The value is the probability that the random variable x falls in the interval . If x increases, becomes smaller, and the probability of falling in the interval also becomes smaller. This character of probability is the same as the "low" fuzzy set , so . Similarly . In these expressions and are the probability densities of the random variable and respectively, and .
Calculated in the probabilistic method, the membership function of each level can be obtained:
where .
However, for the convenience of presentation we still use and to represent the three level membership function of a factor .
3.2.3. Constructing the Fuzzy Evaluation Matrix
From the above, the membership function of each factor can be obtained. Bringing the data of the five factors of an agent vehicle j into the corresponding membership functions, the relationship between the five factors and the grading of V can be obtained as:
Thus a fuzzy relation matrix for vehicle j can be obtained:
Assuming that there are m agent vehicle participating in the evaluation, m fuzzy relation matrices will be obtained for each customer vehicle i: . In Algorithm 1, we select the agent vehicles that meet the customer vehicle’s needs.
3.2.4. Determination of the Weight
The importances of the five factors in the comprehensive evaluation system are not the same. If the status is important, it should be given a greater weight; otherwise, it should be given a smaller weight.
Assume that the weight set is , where .
3.2.5. Fuzzy Comprehensive Evaluation
A and are used in a fuzzy synthesis operation: to obtain a comprehensive evaluation for the agent vehicle j. Here, considers the degree of subordination of the agent vehicle j. Then according to the principle of maximum subordination, we can get the evaluation level of agent vehicle j:
Here . Additionally, the fuzzy synthesis operator “∘” selects the fuzzy operator . In the fuzzy operator , • is defined as multiplication, and ⊕ is defined as the operation . Thus, .
The following normalization is performed on B:
An understanding of B can be achieved through the following example: for an agent vehicle j, its comprehensive evaluation indicates that taking the five factors of the agent vehicle j into consideration, of vehicles evaluate it as “low”, of vehicles evaluate it as “medium”, and of vehicles evaluate it as “high”. According to the principle of maximum degree of membership, the evaluation level of agent vehicle j is “medium”.
Next, based on the quantized value of the fuzzy comment set, that is:
the overall rating of the agent vehicle j is:
In this way, we can get the comment sets of several agent vehicles from the customers who participate in the evaluation:
Then the comments on agent vehicles from customers are expressed as follows, where n represents the number of customer vehicles, and m represents the number of agent vehicles:
| Algorithm 2 Fuzzy Comprehensive Evaluation Algorithm |
| Input: Customer vehicle request package; agent vehicle service package; signal effective distance ; path length L; available agent vehicle list for each Output: Available QoS (quality of service) for each agent vehicle j; list for customer vehicle i
|
3.3. Optimization
3.3.1. Comprehensive Vehicle Evaluation
To satisfy the requests of more customer vehicles and enable the agent vehicles to provide more effective service, taking the bandwidth limitation of the agent vehicles and the comprehensive scores given by the customer vehicles into account, this section distributes the agent vehicle resources and chooses the most suitable vehicle for customers. According to the discussion above, we propose the following access selection model:
s.t.
where: means that each customer vehicle can only be connected to one agent vehicle at the same time; means that the bandwidth sum of customer vehicles served by the same proxy vehicle should not exceed its bandwidth capacity; means that the computing capability provided by the agent vehicle shall be no less than the computing capability of the customer vehicle’s requirements; and indicates the computing capability that the customer vehicle should meet to satisfy the requirement of collaborative download within the service time of the agent vehicle in the path, so as to ensure the integrity of data transmission.
3.3.2. Agent Vehicle Resource Allocation Algorithm
| Algorithm 3 Agent Vehicle Distribution Optimization Algorithm |
| Input: The comments on agent vehicles for each customer vehicle E Output: Collaborative offload distribution scheme X
|
4. Performance Evaluation
In this section, we use the proposed FCE (fuzzy comprehensive evaluation) algorithm to construct a series of experiments for the V2V agent vehicle selection problem based on the MATLAB platform. The experimental parameters are shown in Table 2. We compare the performance of the FCE algorithm with the FL-CFT [19] and RSB (random selection based on computing capability and bandwidth) algorithms under different numbers of customer requests. In order to realize the comparison between the FCE algorithm and the FL-CFT algorithm, we quantify the index obtained by FL-CFT using the process after the second step 13 of the FL-CFT algorithm. The comparative performance is as follows.
4.1. Experimental Setup
In the experiment, we consider that cooperative uninstallation occurs in the area without network coverage between two RSUs. The information requested between vehicles can only be shared through the information sharing mechanism between V2V. Vehicles apply to the vehicle cloud (VC) before arriving in the region. The vehicle cloud aggregates vehicle information, and uses the FCE algorithm proposed in this paper to analyze the information of customer vehicles and agent vehicles, so as to provide an agent vehicle allocation scheme that maximizes customer satisfaction. The following assumptions are employed in our simulations:
- Set the same driving path between the customer vehicle and the agent vehicle.
- Equip each vehicle (including the customer and agent vehicles) with an OBU, which can receive information and transmit information to the surrounding vehicles, and set the effective communication range of the vehicle.
- There are only two forms of data transmission between a customer vehicle and an agent vehicle: completion and failure.
- Each vehicle can act as a customer vehicle when requesting data and an agent vehicle when providing data service, but it can only be one in a period.
4.2. Performance Analysis
In this paper, we analyze the performance of the algorithm in four aspects: quality of service, average throughput, number of request failures, and average consumption. Quality of service is a comprehensive evaluation index under multi-factor consideration. It is the standard to verify the performance of the algorithm. Average throughput is the data transmission volume per unit time, which is the main factor to ensure the fluency of a customer vehicle’s data requests. The number of request failures is the number of times that the agent vehicle cannot provide complete data transmission for the customer vehicle, which shows the stability of data transmission. Cost is an important reference factor for each customer vehicle in choosing agent vehicle service. We discuss the impact of the number of customer vehicles on the quality of service, average throughput, number of request failures, and average consumption in the process of collaboration between customer and agent vehicles.
Figure 3 shows that the average customer satisfaction curve obtained by the FCE algorithm is higher than that of the FL-CFT and RSB algorithms when changing the number of customer vehicle requests. The RSB curve has the worst performance. This is because the FCE algorithm considers the computing capability, bandwidth, unit cost, credibility, and path consistency of the agent vehicle in the process of selection; while FL-CFT only considers the velocity, distance, and connection of the agent vehicle; and RSB only considers the bandwidth and path consistency. Figure 3 shows that the FCE algorithm has better average customer satisfaction performance than the FL-CFT and RSB algorithms.
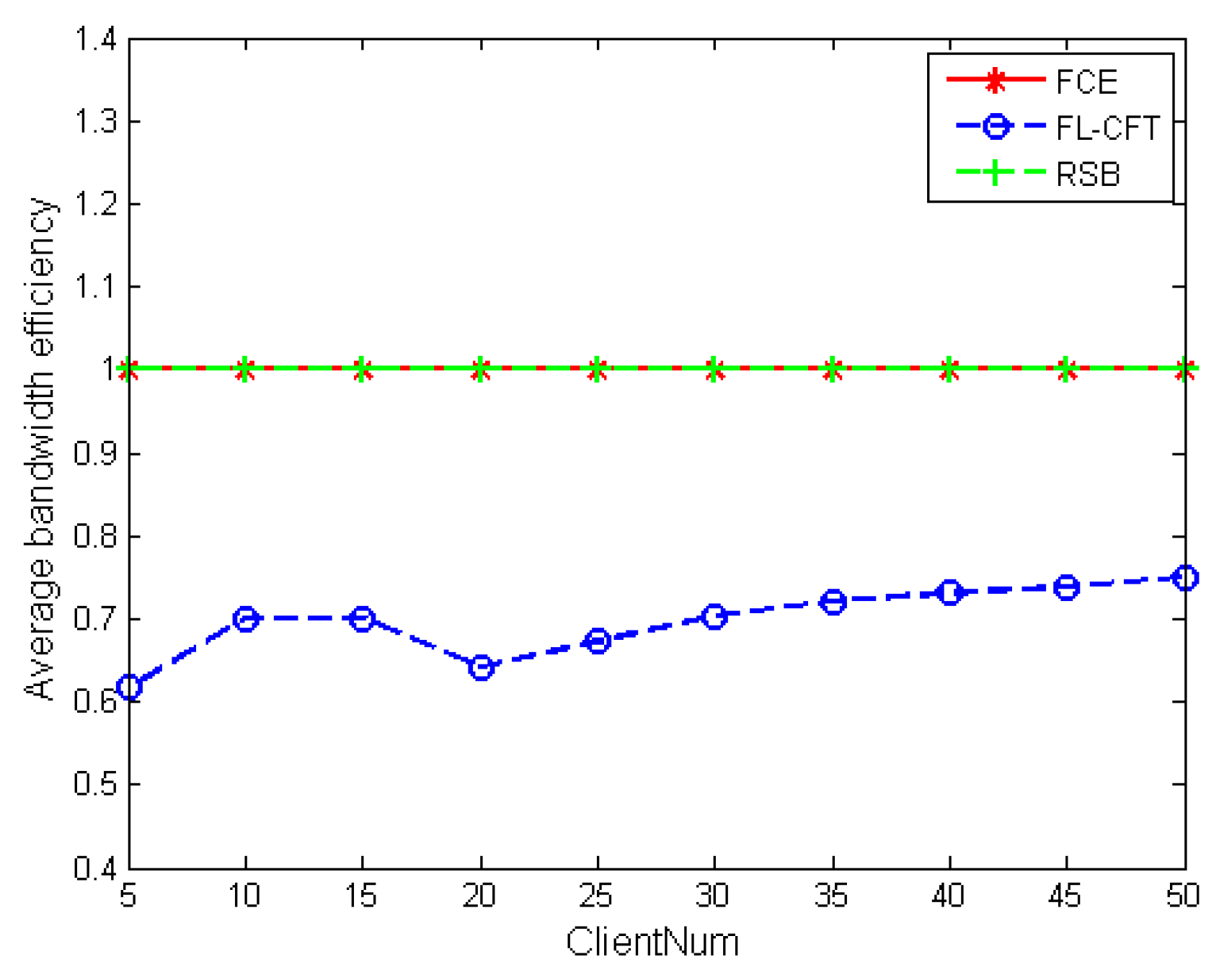
Figure 4 shows that in the process of changing the number of customer vehicle requests, the effective bandwidth ratio of the FCE algorithm to the RSB Algorithm is 1, and the performance of the FL-CFT method is the worst. This is because the FCE and RSB algorithms take the bandwidth as an important index to evaluate the agent vehicle selection process, while FL-CFT does not consider this index. Figure 4 shows that the FCE and RSB algorithms have better average bandwidth utilization than the FL-CFT algorithm. This index also shows whether the selected agent vehicle can meet the customer’s bandwidth requirements. The FCE and RSB algorithms can provide a better data fluency experience for a customer vehicle.
In order to verify the correctness and stability of the algorithm, we run a model experiment with 500 customer vehicles and 3000 agent vehicles, and count the failure times of customer requests under the experimental conditions. Figure 5 shows that in the process of changing the number of customer vehicle requests, the FCE algorithm does not fail, while the failure rates of the FL-CFT and RSB algorithms increase with an increase in the number of customer requests. This is because the FCE algorithm takes into account the interaction of many factors, and takes the path matching degree of customer vehicles and agent vehicles and the reputation of customer vehicles as important indicators. Figure 5 shows that the FCE algorithm has better selectivity and stability than the FL-CFT and RSB algorithms.
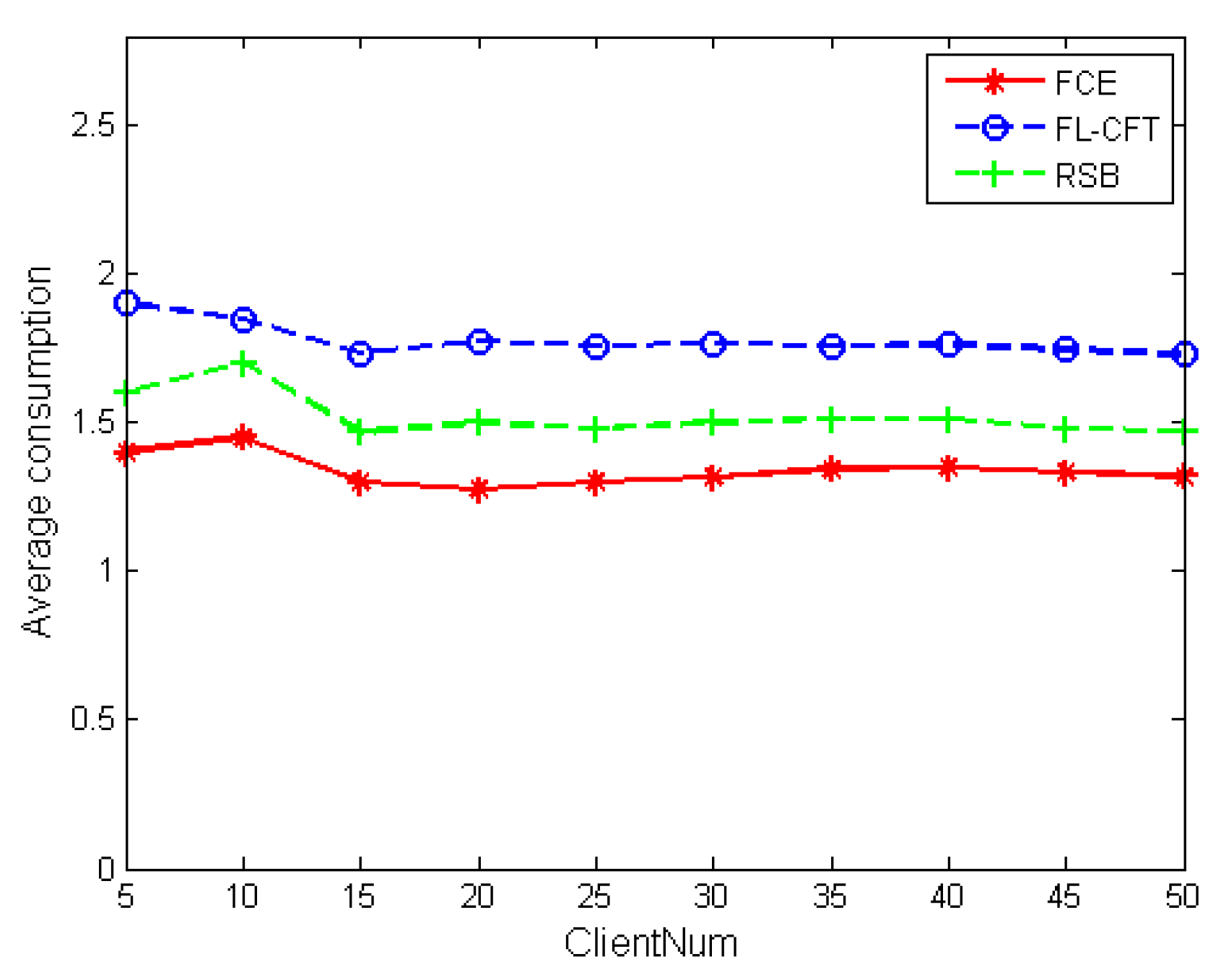
Customer consumption is always an important indicator of customer vehicles in the selection of agent vehicles. Figure 6 shows that the average consumption of the FCE algorithm is less than that of the FL-CFT and RSB algorithms with increasing customer vehicle requests. The main reason is that the FCE algorithm considers all the required vehicle information when selecting the agent vehicle, and seeks an optimal selection strategy. The FL-CFT and RSB algorithms ignore the interaction of these factors. Figure 6 shows that the FCE algorithm is more economical than the FL-CFT and RSB algorithms.
5. Conclusions
In this paper, the problem of agent vehicle selection for V2V collaborative unloading in a vehicle network is studied. A method of joint selection in a V2V network, based on fuzzy comprehensive evaluation is proposed. Different from the previous articles, many factors such as computing capability, bandwidth, consumption index, reputation, and path matching of the vehicles are considered in this paper. At the same time, we take the relationship between the customer vehicle demand and the agent vehicle as tan index item. In this paper, we propose a fuzzy comprehensive evaluation method to evaluate customer and agent vehicles, and give a multi-constrained optimization model to describe the agent vehicle allocation scheme. The simulation results show that the proposed vehicle selection algorithm has good prospects of usability and application.
Author Contributions
These authors contributed equally to this work. All authors discussed the required algorithm to complete the manuscript. T.H., X.G. and Z.C. conceived the paper. T.H. and Y.Z. did the experiments and wrote the paper. X.G. and Z.C. checked typographical errors.
Funding
This work was funded by the Natural Science Foundation of Hebei Province, China (Grant no. E2017203351) and by the Scientific Research Foundation of YanShan University.
Acknowledgments
The authors are very grateful to the reviewers for their valuable comments on the revision of the paper. These suggestions play an important role in the construction of Algorithm 3 and the simulations.
Conflicts of Interest
The authors declare that there are no conflicts of interest regarding the publication of this paper.
References
- Lu, N.; Cheng, N.; Zhang, N.; Shen, X.; Mark, J.W. Connected Vehicles: Solutions and Challenges. IEEE Internet Things J. 2014, 1, 289–299. [Google Scholar] [CrossRef]
- Amadeo, M.; Campolo, C.; Molinaro, A. Information-centric networking for connected vehicles: A survey and future perspectives. IEEE Commun. Mag. 2016, 54, 98–104. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, N.; Bi, Y.; Yu, Q.; Shen, X.S.; Shan, D.; Bai, F. TV White Space Enabled Connected Vehicle Networks: Challenges and Solutions. IEEE Netw. 2017, 31, 6–13. [Google Scholar] [CrossRef]
- Lim, J.H.; Kim, W.; Naito, K.; Yun, J.H.; Cabric, D.; Gerla, M. Interplay Between TVWS and DSRC: Optimal Strategy for Safety Message Dissemination in VANET. IEEE J. Sel. Areas Commun. 2014, 32, 2117–2133. [Google Scholar] [CrossRef]
- Wang, M.; Shan, H.; Luan, T.H.; Lu, N.; Zhang, R.; Shen, X.; Bai, F. Asymptotic Throughput Capacity Analysis of VANETs Exploiting Mobility Diversity. IEEE Trans. Veh. Technol. 2015, 64, 4187–4202. [Google Scholar] [CrossRef]
- Ota, K.; Dong, M.; Chang, S.; Zhu, H. MMCD: Cooperative downloading for highway VANETs. IEEE Trans. Emerg. Top. Comput. 2015, 3, 34–43. [Google Scholar] [CrossRef]
- Yue, D.; Li, P.; Zhang, T.; Cui, J.; Jin, Y.; Liu, Y.; Liu, Q. Cooperative Content Downloading in Hybrid VANETs: 3G/4G or RSUs Downloading. In Proceedings of the 2016 IEEE International Conference on Smart Cloud (SmartCloud), New York, NY, USA, 18–20 November 2016. [Google Scholar]
- Liu, J.; Ge, Y.; Li, S.; Shu, R.; Ding, S. A transmission scheduling method of cooperative downloading for Vehicular Networking. In Proceedings of the 2014 14th International Symposium on Communications and Information Technologies (ISCIT), Incheon, Korea, 24–26 September 2015. [Google Scholar]
- Huang, W.; Wang, L. ECDS: Efficient collaborative downloading scheme for popular content distribution in urban vehicular networks. Comput. Netw. 2016, 101, 90–103. [Google Scholar] [CrossRef]
- Wang, T.; Song, L.; Han, Z.; Lu, Z.; Hu, L. Popular content distribution in vehicular networks using coalition formation games. In Proceedings of the 2013 IEEE International Conference on Communications (ICC), Budapest, Hungary, 9–13 June 2013. [Google Scholar]
- Wang, J.; Wang, S.; Sun, Y.; Changchun, Y.; Lu, W.; Wu, D. An incentive mechanism for cooperative downloading method in VANET. In Proceedings of the 2013 IEEE International Conference on Vehicular Electronics and Safety, Dongguan, China, 28–30 July 2013. [Google Scholar]
- Wu, C.; Gerla, M.; Mastronarde, N. Incentive driven LTE content distribution in VANETs. In Proceedings of the 2015 14th Annual Mediterranean Ad Hoc Networking Workshop (MED-HOC-NET), Vilamoura, Portugal, 17–18 June 2015. [Google Scholar]
- Zhou, H.; Liu, B.; Luan, T.H.; Hou, F.; Gui, L.; Li, Y.; Yu, Q.; Shen, X.S. ChainCluster: Engineering a Cooperative Content Distribution Framework for Highway Vehicular Communications. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2644–2657. [Google Scholar] [CrossRef]
- Lai, C.; Zhang, K.; Cheng, N.; Li, H.; Shen, X. SIRC: A Secure Incentive Scheme for Reliable Cooperative Downloading in Highway VANETs. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1559–1574. [Google Scholar] [CrossRef]
- Zhang, W.; Jiang, S.; Zhu, X.; Wang, Y. Privacy-Preserving Cooperative Downloading for Value-Added Services in VANETs. In Proceedings of the International Conference on Intelligent Networking & Collaborative Systems, Xi’an, China, 9–11 September 2013. [Google Scholar]
- Liu, J.; Zhang, W.; Wang, Q.; Li, S.; Chen, H.; Cui, X.; Sun, Y. A Cooperative Downloading Method for VANET Using Distributed Fountain Code. Sensors 2016, 16, 1685. [Google Scholar] [CrossRef] [PubMed]
- Molisch, A.F.; Mehta, N.B.; Yedidia, J.S.; Zhang, J. Performance of Fountain Codes in Collaborative Relay Networks. IEEE Trans. Wirel. Commun. 2007, 6, 4108–4119. [Google Scholar] [CrossRef]
- Lin, C.C.; Deng, D.J.; Yao, C.C. Resource allocation in vehicular cloud computing systems with heterogeneous vehicles and roadside units. IEEE Internet Things J. 2017, 5, 3692–3700. [Google Scholar] [CrossRef]
- Luo, Q.; Cai, X.; Luan, T.H.; Ye, Q. Fuzzy logic-based integrity-oriented file transfer for highway vehicular communications. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 3. [Google Scholar] [CrossRef]
- Liu, J.; Zhai, H.; Jia, Z.; Li, S.; Chen, H.; Cui, X. A balanced cooperative downloading method for VANET. In Proceedings of the 2016 16th International Symposium on Communications and Information Technologies (ISCIT), Qingdao, China, 26–28 September 2016. [Google Scholar]
- Huang, C.M.; Yang, C.C.; Lin, H.Y. A bandwidth aggregation scheme for member-based cooperative networking over the hybrid VANET. In Proceedings of the 2011 IEEE 17th International Conference on Parallel and Distributed Systems (ICPADS), Tainan, Taiwan, 7–9 December 2011. [Google Scholar]
- Deng, G.; Li, F.; Wang, L. Cooperative downloading in vanets-lte heteroge- neous network based on named data. In Proceedings of the 2016 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), San Francisco, CA, USA, 10–14 April 2016. [Google Scholar]
- Hao, Y.; Tang, J.; Cheng, Y. Secure cooperative data downloading in ve- hicular ad hoc networks. IEEE J. Sel. Areas Commun. 2013, 31, 523–537. [Google Scholar]
- Mezghani, F.; Dhaou, R.; Nogueira, M.; Beylot, A.L. Offloading Cellular Networks Through V2V Communications—How to Select the Seed-Vehicles? In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016. [Google Scholar]
- Jiang, D.; Huo, L.; Lv, Z.; Song, H.; Qin, W. A Joint Multi-Criteria Utility-Based Network Selection Approach for Vehicle-to-Infrastructure Networking. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3305–3319. [Google Scholar] [CrossRef]
Figure 1.
Comprehensive evaluation index system.

Figure 2.
The normal distribution properties.

Figure 3.
Average quality of service of the three algorithms.

Figure 4.
Average bandwidth efficiency of the three algorithms.

Figure 5.
Number of failures for the three algorithms.

Figure 6.
Average consumption of the three algorithms.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Comprehensive evaluation index system.
| Target Layer | Factor Layer |
|---|---|
| Vehicle selection result | Computing capability |
| Bandwidth | |
| Unit cost | |
| Credibility | |
| Path consistency |
Table 2.
The basic parameters of the simulation.
| Parameter | Number | Unit | Information Description |
|---|---|---|---|
| L | 3000 | m | Path length |
| 200 | m | Effective distance between the customer vehicle and the agent vehicle | |
| n | 50 | Number of customer vehicles requesting data | |
| m | 300 | Number of agent vehicles providing data services | |
| 20–80 | Mb | Computing capability of customer vehicle i’s request | |
| 3–12 | Mbps | Bandwidth of customer vehicle i | |
| 20-35 | m/s | Speed of customer vehicle i | |
| 20–80 | Mb | Computing capability of agent vehicle j | |
| 3–12 | Mbps | Bandwidth of agent vehicle j | |
| 0–3 | Service cost of agent vehicle j in unit time | ||
| 0–1 | Accumulated credit ratio of agent vehicle j | ||
| 20–35 | m/s | Speed of agent vehicle j | |
| 0–1 | Path consistency between customer vehicle i and agent vehicle j | ||
| The list of agent vehicles available for customer vehicle i | |||
| Connection status between customer vehicle i and agent vehicle j | |||
| Available QoS list of agent vehicle j to customer vehicle i |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Huang, T.; Guo, X.; Zhang, Y.; Chang, Z. Collaborative Content Downloading in VANETs with Fuzzy Comprehensive Evaluation. Symmetry 2019, 11, 502. https://0-doi-org.brum.beds.ac.uk/10.3390/sym11040502
AMA Style
Huang T, Guo X, Zhang Y, Chang Z. Collaborative Content Downloading in VANETs with Fuzzy Comprehensive Evaluation. Symmetry. 2019; 11(4):502. https://0-doi-org.brum.beds.ac.uk/10.3390/sym11040502
Chicago/Turabian StyleHuang, Tianyu, Xijuan Guo, Yue Zhang, and Zheng Chang. 2019. "Collaborative Content Downloading in VANETs with Fuzzy Comprehensive Evaluation" Symmetry 11, no. 4: 502. https://0-doi-org.brum.beds.ac.uk/10.3390/sym11040502
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.