An Extended Analysis on Robust Dissipativity of Uncertain Stochastic Generalized Neural Networks with Markovian Jumping Parameters


 , ,
, , 
Abstract
:1. Introduction
2. Problem Statement and Basic Information
3. Main Results
3.1. Dissipativity Analysis
3.2. An Analysis on Robust Dissipativity
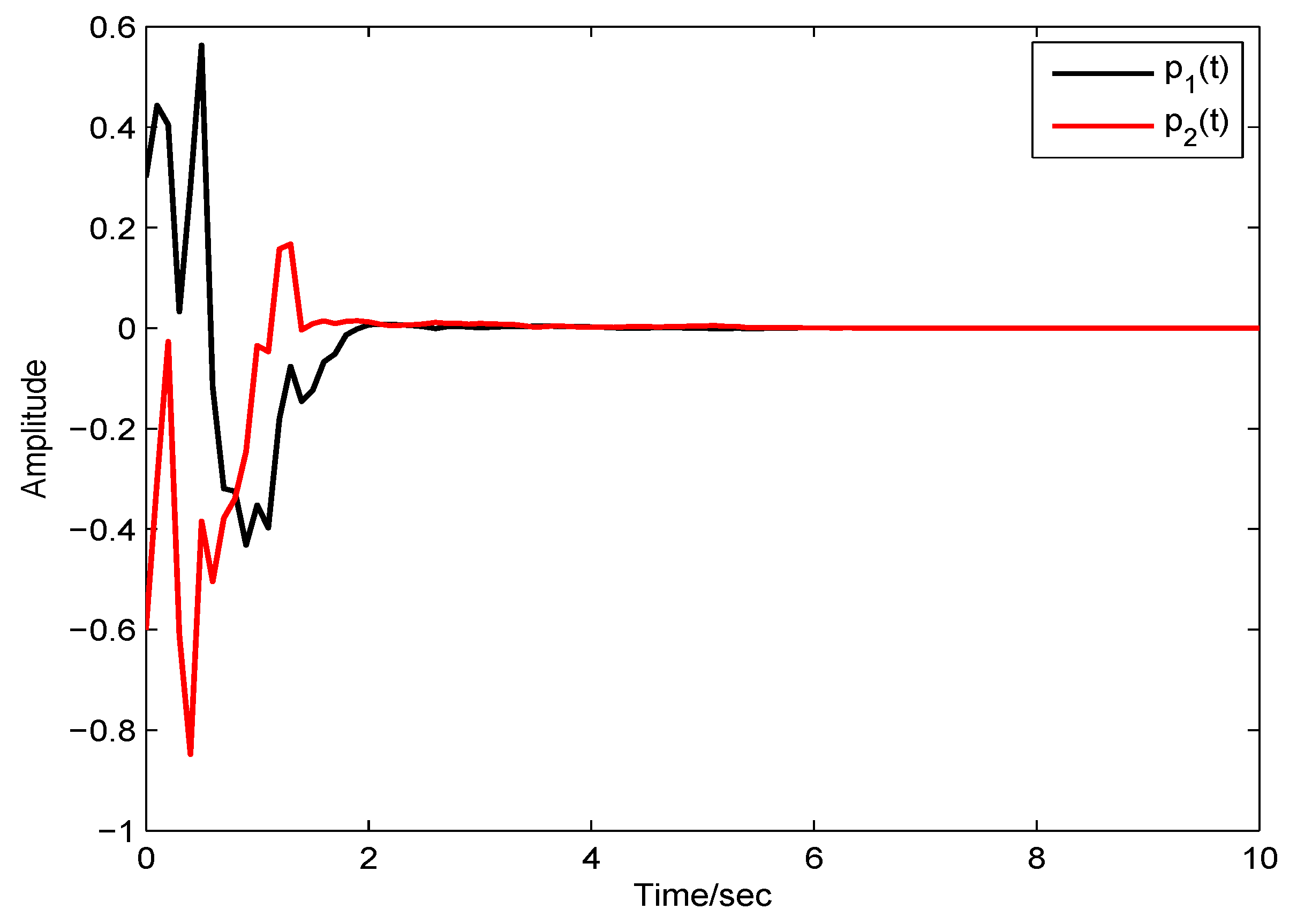
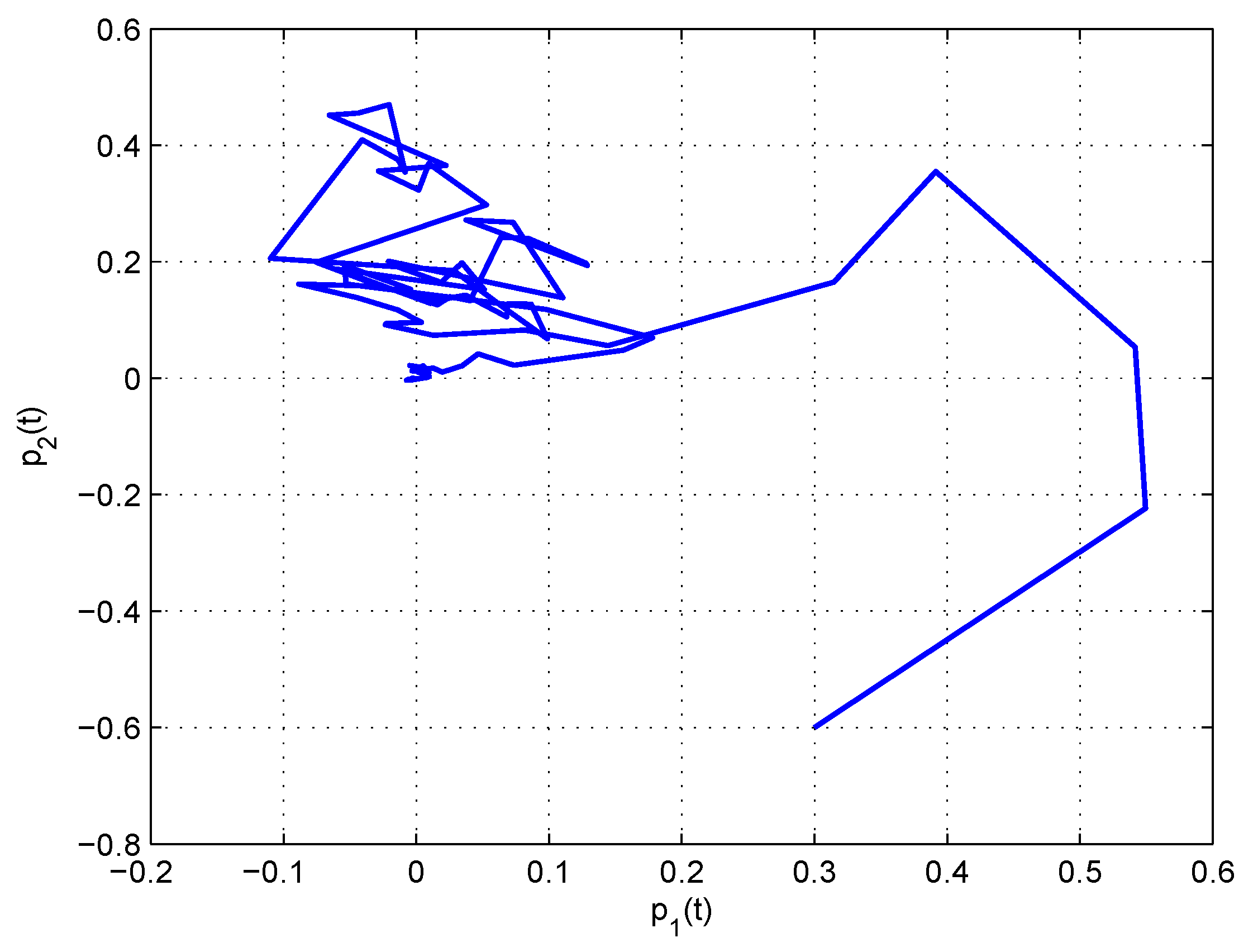
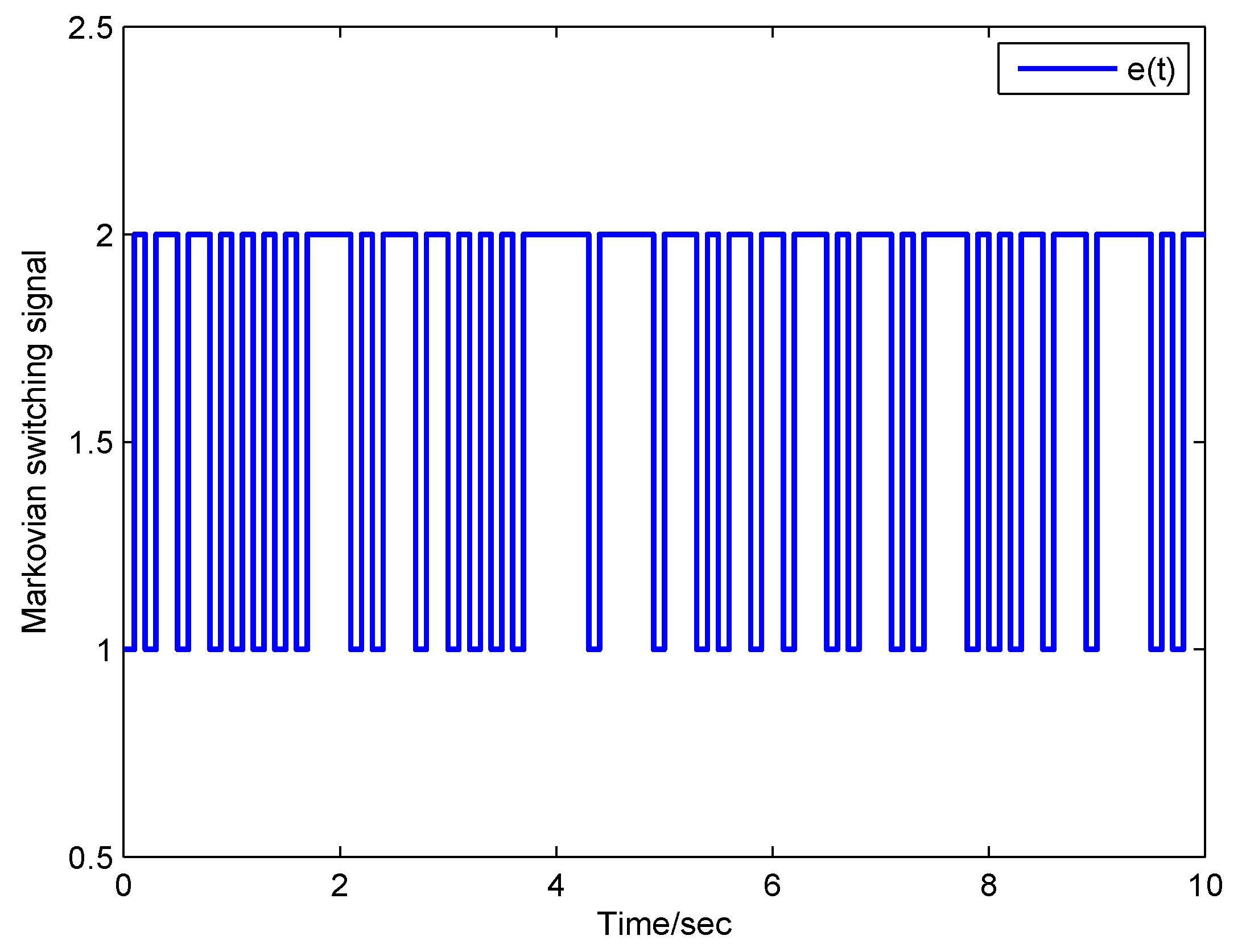
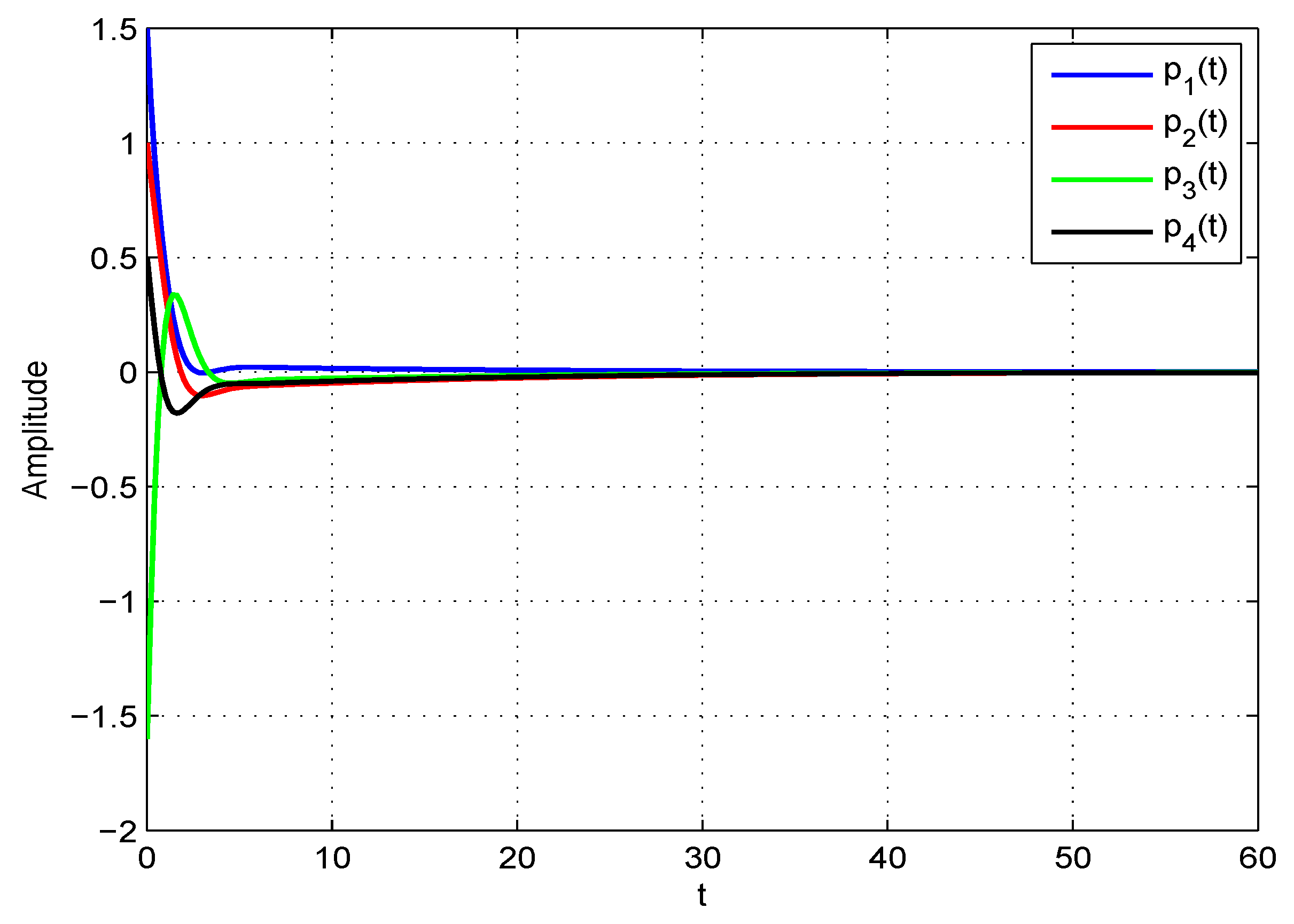
4. Simulation Studies
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cao, J. Global asymptotic stability of neural networks with transmission delays. Int. J. Syst. Sci. 2000, 31, 1313–1316. [Google Scholar] [CrossRef]
- Arik, S. An analysis of global asymptotic stability of delayed cellular neural networks. IEEE Trans. Neural Netw. 2012, 13, 1239–1242. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Z.; Song, Q.; He, S. Passivity analysis of stochastic neural networks with time-varying delays and leakage delay. Neurocomputing 2014, 125, 22–27. [Google Scholar] [CrossRef]
- Wei, H.; Li, R.; Chen, C. State estimation for memristor-based neural networks with time-varying delays. Int. J. Mach. Learn. Cybern. 2015, 6, 213–225. [Google Scholar] [CrossRef]
- Huang, H.; Huang, T.; Cao, Y. Reduced-order filtering of delayed static neural networks with Markovian jumping parameters. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 5606–5618. [Google Scholar] [CrossRef] [PubMed]
- Arunkumar, A.; Sakthivel, R.; Mathiyalagan, K.; Park, J.H. Robust stochastic stability of discrete-time fuzzy Markovian jump neural networks. ISA Trans. 2014, 53, 1006–1014. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, Z.; Liu, Y.; Alsaadi, F.E. Stochastic stability for distributed delay neural networks via augmented Lyapunov–Krasovskii functionals. Appl. Math. Comput. 2018, 338, 869–881. [Google Scholar] [CrossRef]
- Chen, G.; Xia, J.; Zhuang, G. Delay-dependent stability and dissipativity analysis of generalized neural networks with Markovian jump parameters and two delay components. J. Frankl. Inst. 2016, 353, 2137–2158. [Google Scholar] [CrossRef]
- Samidurai, R.; Manivannan, R.; Ahn, C.K.; Karimi, H.R. New criteria for stability of generalized neural networks including Markov jump parameters and additive time delays. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 485–499. [Google Scholar] [CrossRef]
- Jiao, S.; Shen, H.; Wei, Y.; Huang, X.; Wang, Z. Further results on dissipativity and stability analysis of Markov jump generalized neural networks with time-varying interval delays. Appl. Math. Comput. 2018, 336, 338–350. [Google Scholar] [CrossRef]
- Zhang, C.K.; He, Y.; Jiang, L.; Wu, Q.H.; Wu, M. Delay-dependent stability criteria for generalized neural networks with two delay components. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 1263–1276. [Google Scholar] [CrossRef]
- Zeng, H.B.; He, Y.; Wu, M.; Xiao, S. Stability analysis of generalized neural networks with time-varying delays via a new integral inequality. Neurocomputing 2015, 161, 148–154. [Google Scholar] [CrossRef]
- Wang, B.; Yan, J.; Cheng, J.; Zhong, S. New criteria of stability analysis for generalized neural networks subject to time-varying delayed signals. Appl. Math. Comput. 2017, 314, 322–333. [Google Scholar] [CrossRef]
- Sriraman, R.; Cao, Y.; Samidurai, R. Global asymptotic stability of stochastic complex-valued neural networks with probabilistic time-varying delays. Math. Comput. Simulat. 2020, 171, 103–118. [Google Scholar] [CrossRef]
- Wang, C.; Shen, Y. Delay-dependent non-fragile robust stabilization and H∞ control of uncertain stochastic systems with time-varying delay and nonlinearity. J. Frankl. Inst. 2011, 348, 2174–2190. [Google Scholar] [CrossRef]
- Samidurai, R.; Sriraman, R. Robust dissipativity analysis for uncertain neural networks with additive time-varying delays and general activation functions. Math. Comput. Simulat. 2019, 155, 201–216. [Google Scholar] [CrossRef]
- Boukas, E.K.; Liu, Z.K.; Liu, G.X. Delay-dependent robust stability and H∞ control of jump linear systems with time-delay. Int. J. Control 2010, 74, 329–340. [Google Scholar] [CrossRef]
- Cao, Y.Y.; Lam, J.; Hu, L.S. Delay-dependent stochastic stability and H∞ analysis for time-delay systems with Markovian jumping parameters. J. Frankl. Inst. 2013, 340, 423–434. [Google Scholar] [CrossRef]
- Zhu, Q.; Cao, J. Exponential stability of stochastic neural networks with both Markovian jump parameters and mixed time delays. IEEE Trans. Syst. Man Cybern. Part B 2011, 41, 341–353. [Google Scholar]
- Tan, H.; Hua, M.; Chen, J.; Fei, J. Stability analysis of stochastic Markovian switching static neural networks with asynchronous mode-dependent delays. Neurocomputing 2015, 151, 864–872. [Google Scholar] [CrossRef]
- Zhu, S.; Shen, M.; Lim, C.C. Robust input-to-state stability of neural networks with Markovian switching in presence of random disturbances or time delays. Neurocomputing 2017, 249, 245–252. [Google Scholar] [CrossRef]
- Blythe, S.; Mao, X.; Liao, X. Stability of stochastic delay neural networks. J. Frankl. Inst. 2001, 338, 481–495. [Google Scholar] [CrossRef]
- Chen, Y.; Zheng, W. Stability analysis of time-delay neural networks subject to stochastic perturbations. IEEE Trans. Cybern. 2013, 43, 2122–2134. [Google Scholar] [CrossRef] [PubMed]
- Yang, R.; Gao, H.; Shi, P. Novel robust stability criteria for stochastic Hopfield neural networks with time delays. IEEE Trans. Syst. Man Cybern. Part B 2009, 39, 467–474. [Google Scholar] [CrossRef] [PubMed]
- Zhu, S.; Shen, Y. Passivity analysis of stochastic delayed neural networks with Markovian switching. Neurocomputing 2011, 74, 1754–1761. [Google Scholar] [CrossRef]
- Cao, Y.; Samidurai, R.; Sriraman, R. Stability and dissipativity analysis for neutral type stochastic Markovian jump static neural networks with time delays. J. Artif. Int. Soft Comput. Res. 2019, 9, 189–204. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.; Yang, S.X.; Chai, Y.; Feng, W.; Fu, W. Robust stability criteria for uncertain stochastic neural networks of neutral-type with interval time-varying delays. Neural Comput. Appl. 2013, 22, 349–359. [Google Scholar] [CrossRef]
- Pradeep, C.; Chandrasekar, A.; Murugesu, M.; Rakkiyappan, R. Robust stability analysis of stochastic neural networks with Markovian jumping parameters and probabilistic time-varying delays. Complexity 2014, 21, 59–72. [Google Scholar] [CrossRef]
- Sakthivel, R.; Arunkumar, A.; Mathiyalagan, K.; Marshal Anthoni, S. Robust passivity analysis of fuzzy Cohen-Grossberg BAM neural networks with time-varying delays. Appl. Math. Comput. 2011, 275, 213–228. [Google Scholar] [CrossRef]
- Kwon, O.M.; Lee, S.M.; Park, J.H. Improved delay-dependent exponential stability for uncertain stochastic neural networks with time-varying delays. Phys. Lett. A 2010, 374, 1232–1241. [Google Scholar] [CrossRef]
- Muthukumar, P.; Subramanian, K.; Lakshmanan, S. Robust finite time stabilization analysis for uncertain neural networks with leakage delay and probabilistic time-varying delays. J. Frankl. Inst. 2016, 353, 4091–4113. [Google Scholar] [CrossRef]
- Lee, C.H.; Lee, S.H.; Park, M.J.; Kwon, O.M. Stability and stabilization criteria for sampled-data control system via augmented Lyapunov–Krasovskii functionals. Int. J. Control. Autom. Syst. 2018, 16, 2290–2302. [Google Scholar] [CrossRef]
- Park, M.J.; Lee, S.H.; Kwon, O.M.; Ryu, J.H. Enhanced stability criteria of neural networks with time-varying delays via a generalized free-weighting matrix integral inequality. J. Frankl. Inst. 2018, 355, 6531–6548. [Google Scholar] [CrossRef]
- Willems, J.C. Dissipative dynamical systems part I: General theory. Arch. Ration. Mech. Anal. 1972, 45, 321–351. [Google Scholar] [CrossRef]
- Hill, D.L.; Moylan, P.J. Dissipative dynamical systems: Basic input-output and state properties. J. Frankl. Inst. 1980, 309, 327–357. [Google Scholar] [CrossRef]
- Wu, Z.G.; Park, J.H.; Su, H.; Chu, J. Robust dissipativity analysis of neural networks with time-varying delay and randomly occurring uncertainties. Nonlinear Dyn. 2012, 69, 1323–1332. [Google Scholar] [CrossRef]
- Liao, X.; Wang, J. Global dissipativity of continuous-time recurrent neural networks with time delay. Phys. Rev. E 2013, 68, 016118. [Google Scholar] [CrossRef]
- Song, Q.; Zhao, Z. Global dissipativity of neural networks with both variable and unbounded delays. Chaos Solitons Fract. 2005, 25, 393–401. [Google Scholar] [CrossRef]
- Feng, Z.; Lam, J. Stability and dissipativity analysis of distributed delay cellular neural networks. IEEE Trans. Neural Netw. 2011, 22, 976–981. [Google Scholar] [CrossRef]
- Raja, R.; Raja, U.K.; Samidurai, R.; Leelamani, A. Dissipativity of discrete-time BAM stochastic neural networks with Markovian switching and impulses. J. Frankl. Inst. 2013, 350, 3217–3247. [Google Scholar] [CrossRef]
- Zeng, H.B.; Park, J.H.; Zhang, C.F.; Wang, W. Stability and dissipativity analysis of static neural networks with interval time-varying delay. J. Frankl. Inst. 2015, 352, 1284–1295. [Google Scholar] [CrossRef]
- Cao, J.; Yuan, K.; Ho, D.W.C.; Lam, J. Global point dissipativity of neural networks with mixed time-varying delays. Chaos 2006, 16, 013105. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, L.; He, L.; Song, Y. New results on stability analysis of delayed systems derived from extended Wirtingers integral inequality. Neurocomputing 2018, 283, 98–106. [Google Scholar] [CrossRef]
- Samidurai, R.; Sriraman, R. Non-fragile sampled-data stabilization analysis for linear systems with probabilistic time-varying delays. J. Frankl. Inst. 2019, 356, 4335–4357. [Google Scholar] [CrossRef]
- Gu, K.; Kharitonov, V.L.; Chen, J. Stability of Time-Delay Systems; Birkhäuser: Boston, MA, USA, 2003. [Google Scholar]
- Zhu, Q.; Cao, J. Robust exponential stability of Markovian jump impulsive stochastic Cohen-Grossberg neural networks with mixed time delays. IEEE Trans. Neural Netw. 2010, 21, 1314–1325. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Humphries, U.; Rajchakit, G.; Sriraman, R.; Kaewmesri, P.; Chanthorn, P.; Lim, C.P.; Samidurai, R. An Extended Analysis on Robust Dissipativity of Uncertain Stochastic Generalized Neural Networks with Markovian Jumping Parameters. Symmetry 2020, 12, 1035. https://0-doi-org.brum.beds.ac.uk/10.3390/sym12061035
Humphries U, Rajchakit G, Sriraman R, Kaewmesri P, Chanthorn P, Lim CP, Samidurai R. An Extended Analysis on Robust Dissipativity of Uncertain Stochastic Generalized Neural Networks with Markovian Jumping Parameters. Symmetry. 2020; 12(6):1035. https://0-doi-org.brum.beds.ac.uk/10.3390/sym12061035
Chicago/Turabian StyleHumphries, Usa, Grienggrai Rajchakit, Ramalingam Sriraman, Pramet Kaewmesri, Pharunyou Chanthorn, Chee Peng Lim, and Rajendran Samidurai. 2020. "An Extended Analysis on Robust Dissipativity of Uncertain Stochastic Generalized Neural Networks with Markovian Jumping Parameters" Symmetry 12, no. 6: 1035. https://0-doi-org.brum.beds.ac.uk/10.3390/sym12061035