
UAV-Assisted Three-Dimensional Spectrum Mapping Driven by Spectrum Data and Channel Model

 , , ,
, , ,
Abstract
:1. Introduction
2. System Model and Problem Formulation
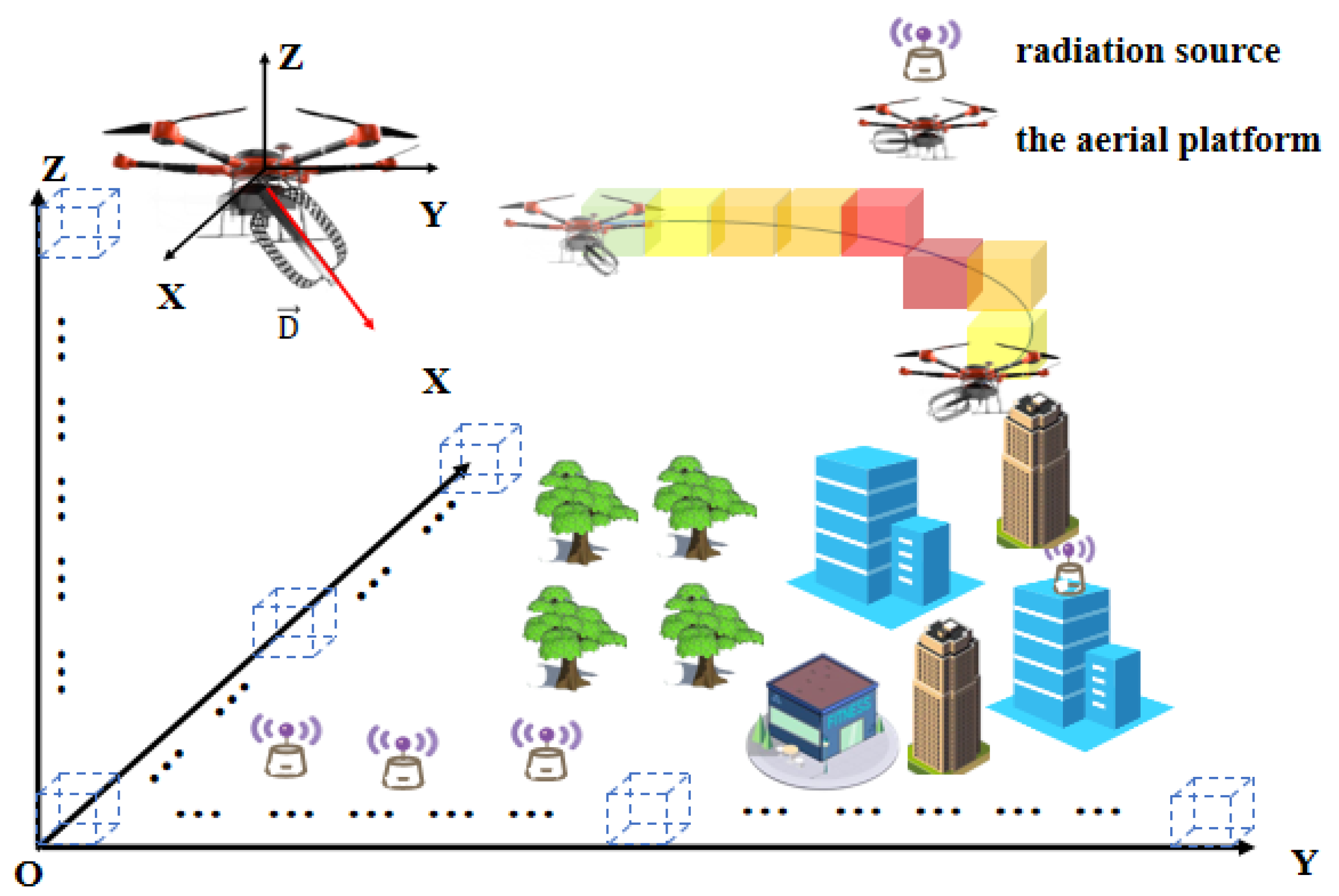
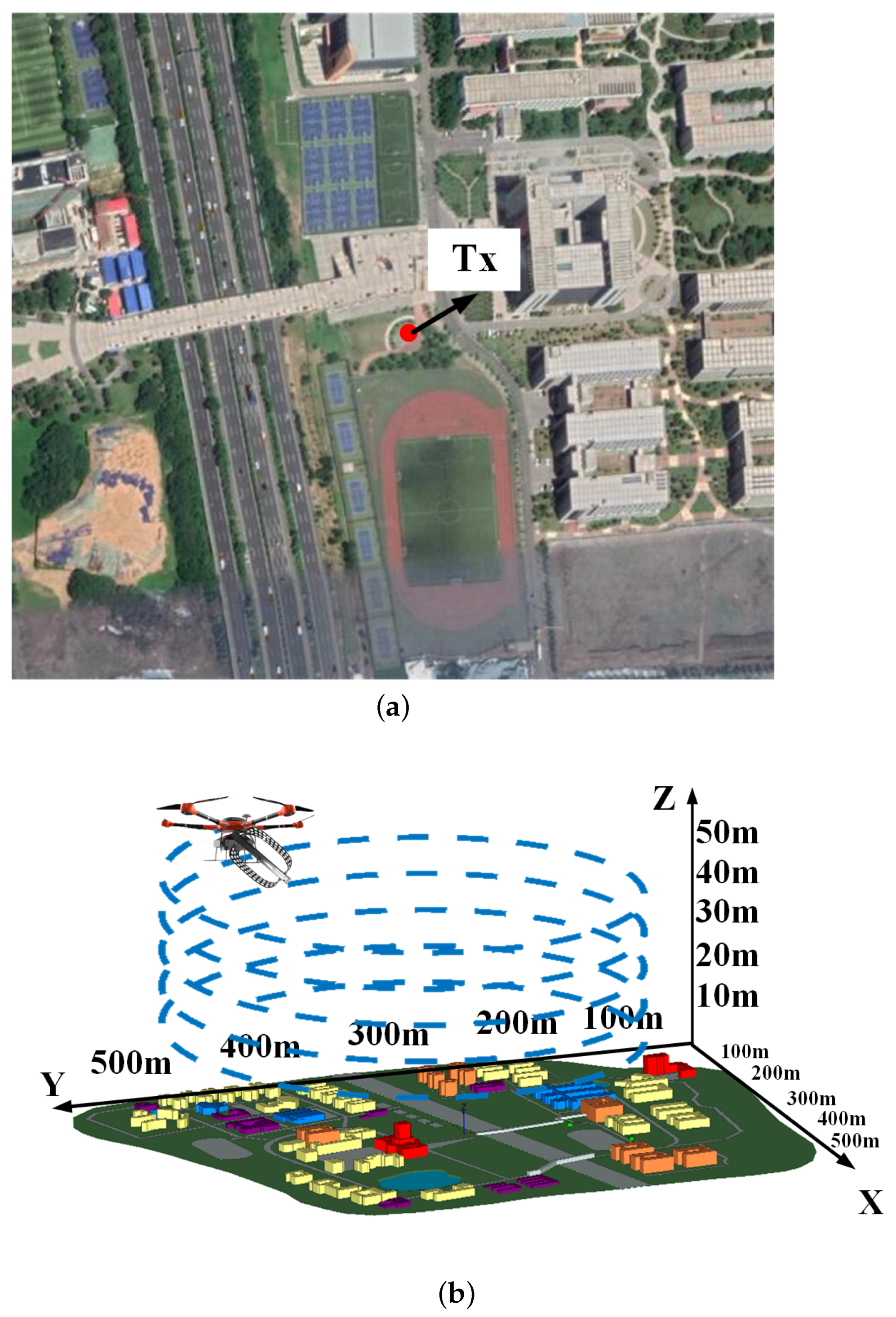
2.1. Spectrum Mapping System
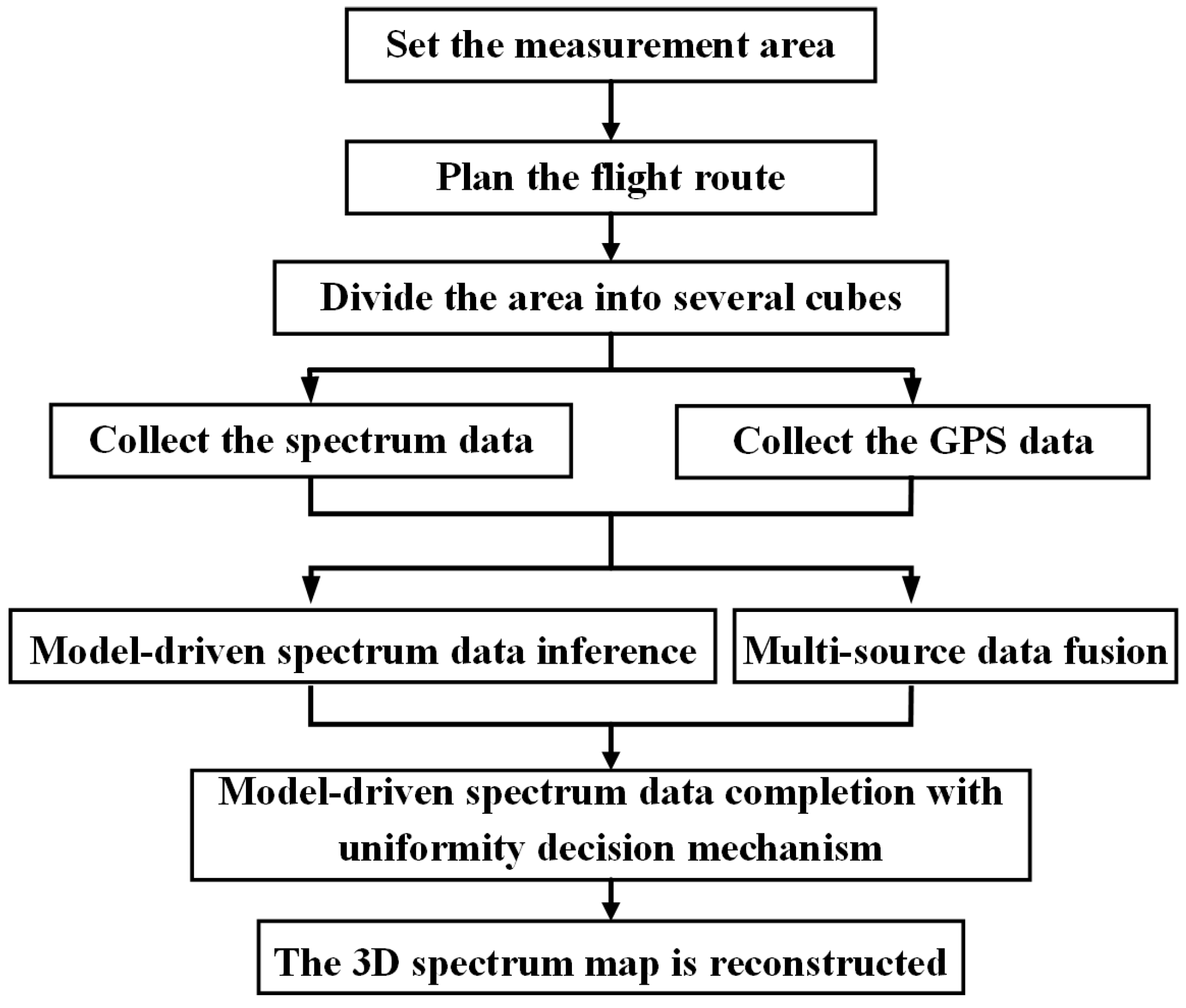
2.2. Spectrum Map Reconstruction Scheme
3. Model-Driven Spectrum Data Interference
3.1. Propagation Channel Model
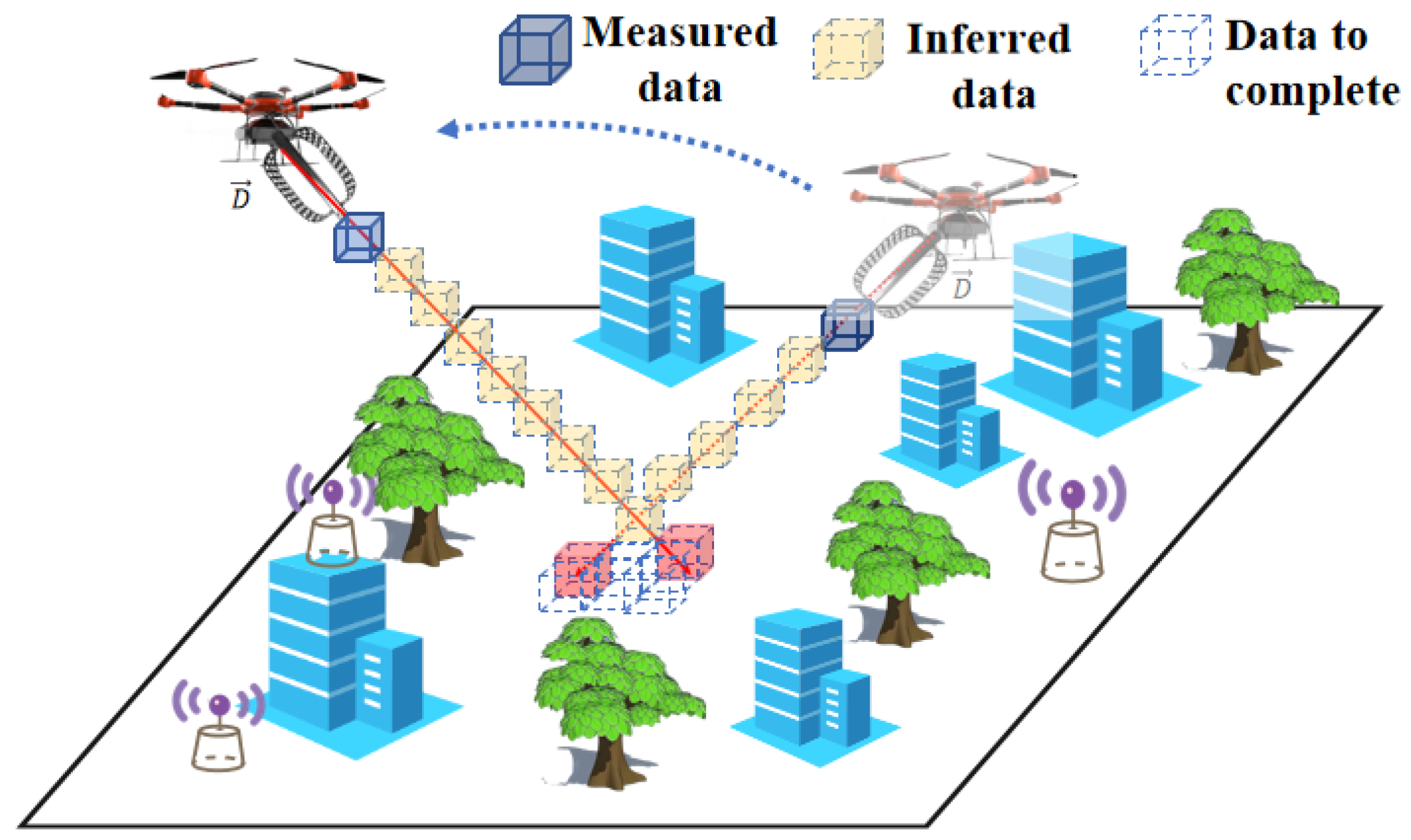
3.2. Spectrum Data Inference
3.3. Multi-Source Data Fusion
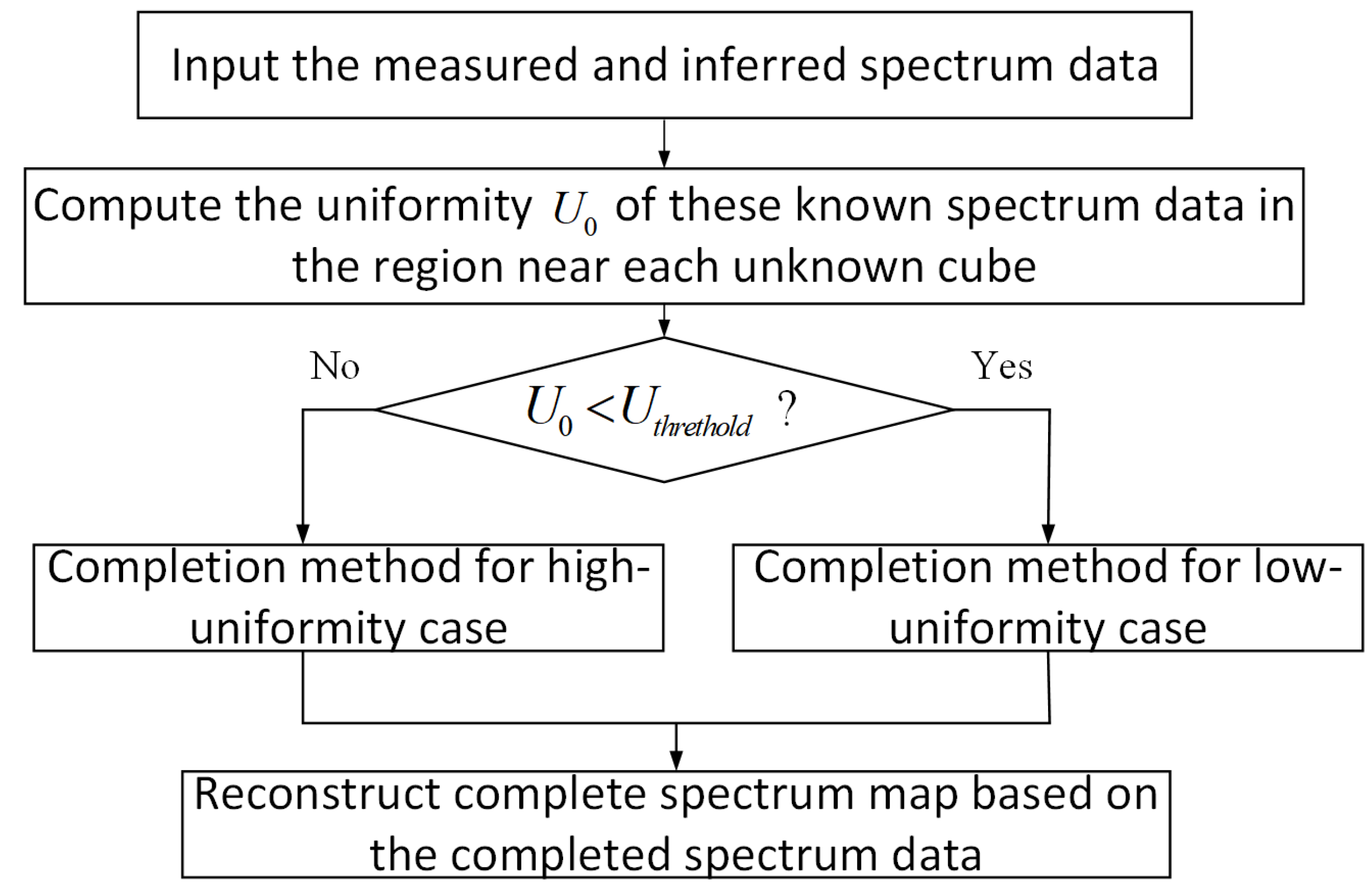
4. Model-Driven Spectrum Data Completion with Uniformity Decision Mechanism
4.1. Completion Scheme
4.2. 3D Spatial Distribution Uniformity Computation
4.3. Completion Method for High-Uniformity Case
4.4. Completion Method for Low-Uniformity Case
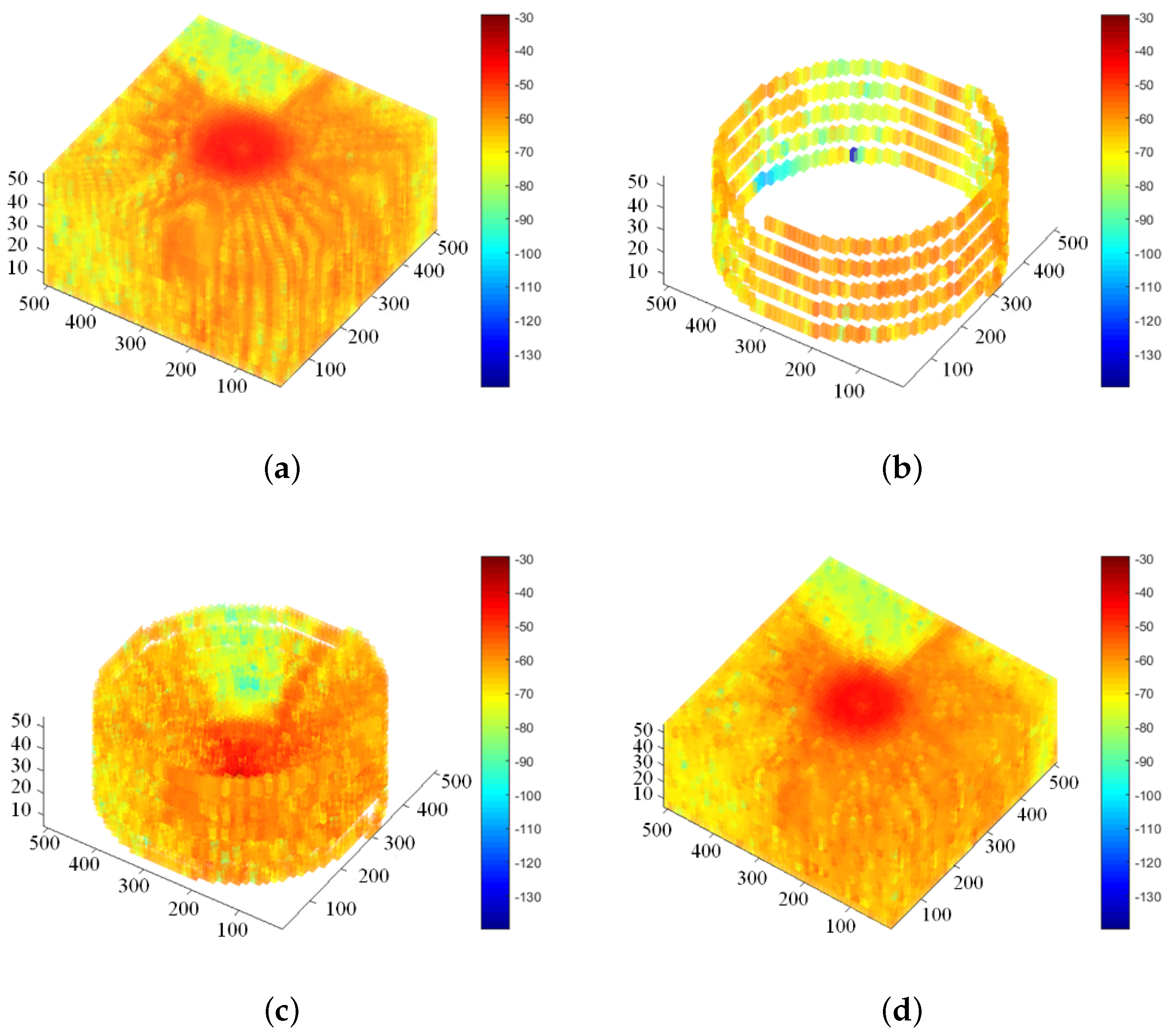
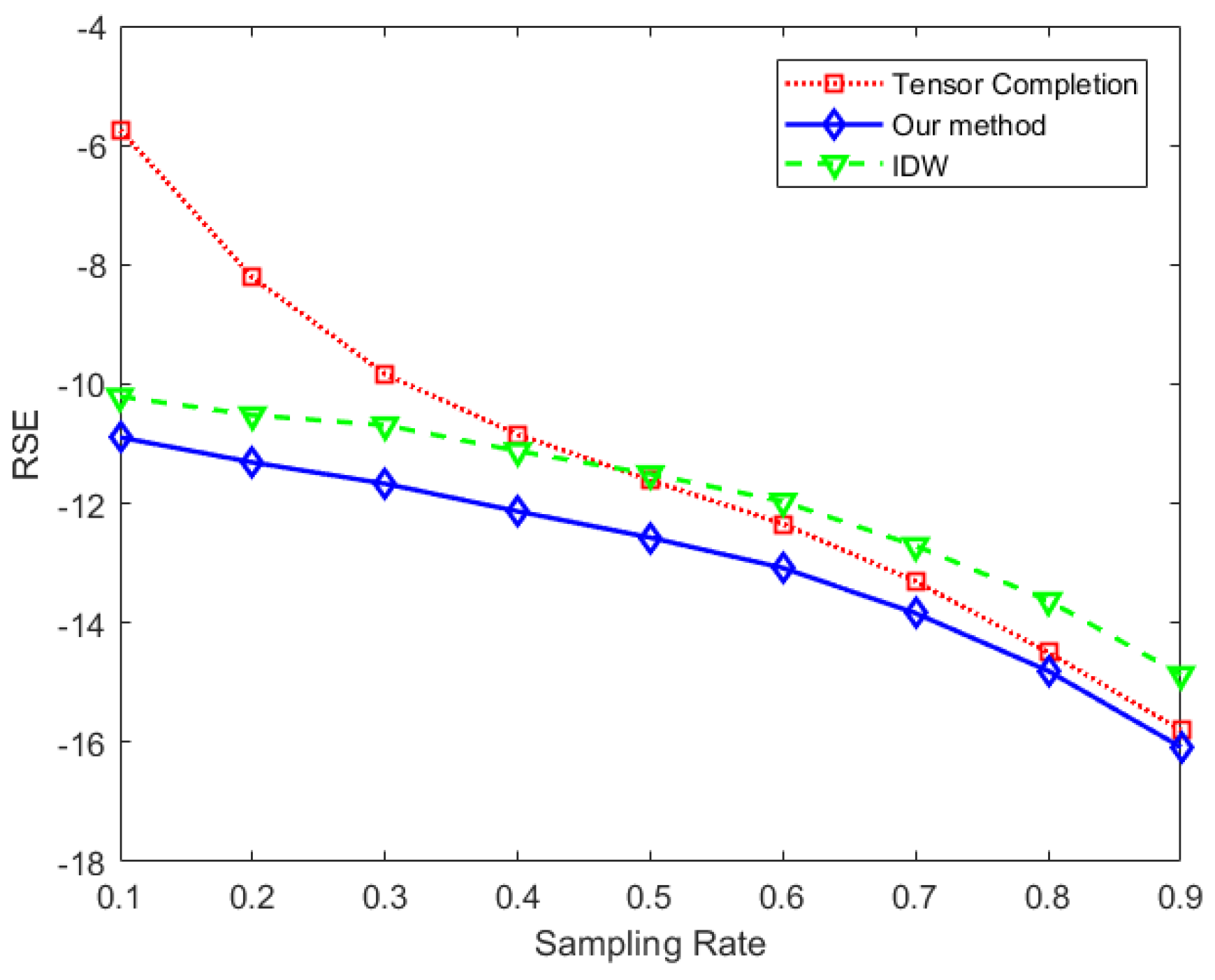
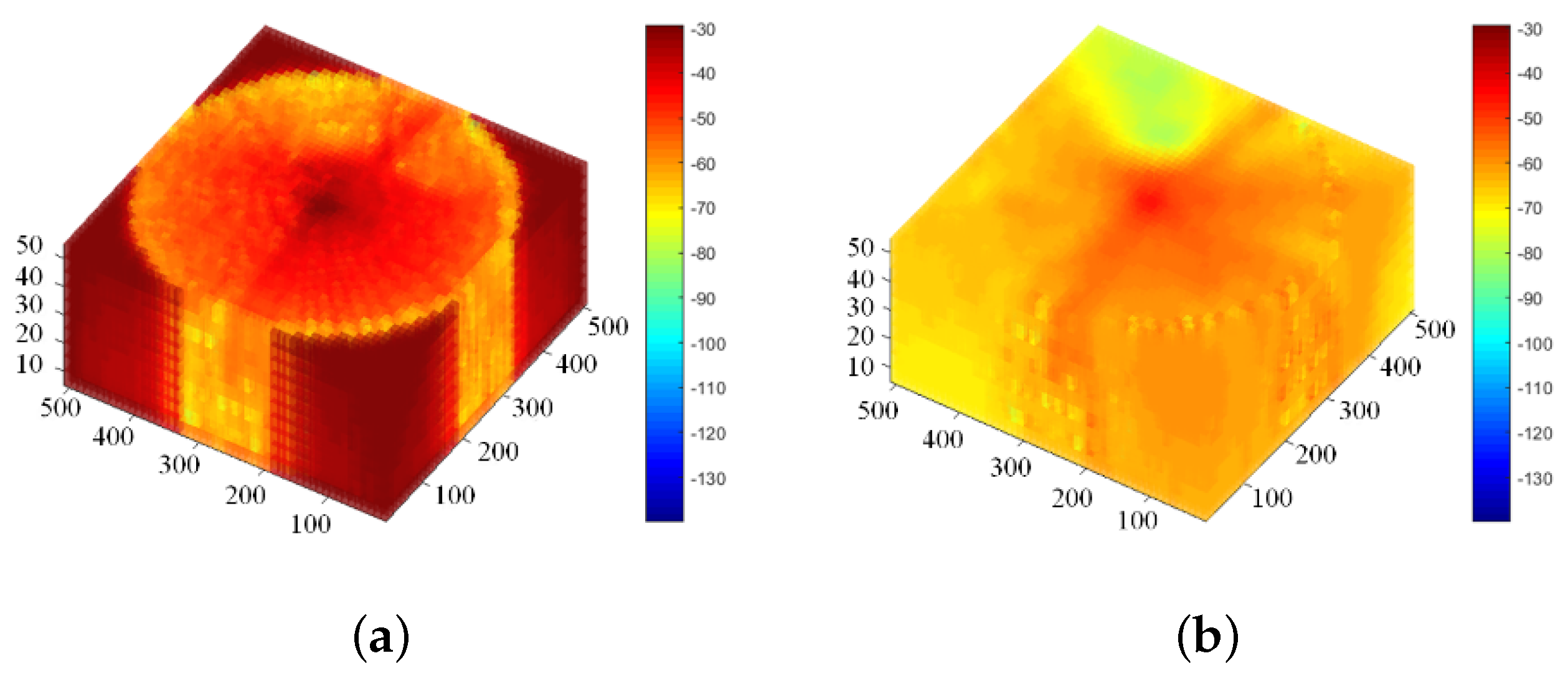
5. Simulation Results and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 3D | Three-dimensional |
| RSS | Received signal strength |
| UAV | Unmanned aerial vehicle |
| IDW | Inverse distance weighted |
| LIvE | LocatIon Estimation based method |
References
- Tang, M.; Zheng, Z.; Ding, G. Efficient TV white space database construction via spectrum sensing and spatial inference. In Proceedings of the 34th International Performance Computing and Communications Conference (IPCCC 2015), Nanjing, China, 14–16 December 2015; pp. 1–5. [Google Scholar]
- Ding, G.; Wu, Q.; Zhang, L.; Yun, L.; Tsiftsis, T.A.; Yao, Y. An Amateur Drone Surveillance System Based on the Cognitive Internet of Things. IEEE Commun. Mag. 2018, 56, 29–35. [Google Scholar] [CrossRef] [Green Version]
- Apaza, R.D.; Knoblock, E.J.; Li, H. A New Spectrum Management Concept for Future NAS Communications. In Proceedings of the 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–16 October 2020; pp. 1–7. [Google Scholar]
- Pesko, M.; Javornik, T.; Kosir, A.; Stular, M.; Mohorcic, M. Radio Environment Maps: The Survey of Construction Methods. KSII Trans. Internet Inf. Syst. 2014, 81, 3789–3809. [Google Scholar]
- Vanhoy, G.; Volos, H.; Bastidas, C.E.C.; Bose, T. A Spatial Interpolation Method for Radio Frequency Maps Based on the Discrete Cosine Transform. In Proceedings of the 2013 IEEE Military Communications Conference (MILCOM 2013), San Diego, CA, USA, 18–20 November 2013; pp. 1045–1050. [Google Scholar]
- Jayawickrama, B.A.; Dutkiewicz, E.; Oppermann, I.; Fang, G.; Ding, J. Improved performance of spectrum cartography based on compressive sensing in cognitive radio networks. In Proceedings of the 2013 IEEE International Conference on Communications (ICC 2013), Budapest, Hungary, 9–13 June 2013; pp. 5657–5661. [Google Scholar]
- Lu, J.; Zha, S.; Huang, J.; Liu, P.; Chen, G.; Xu, S. The iterative completion method of the spectrum map based on the difference of measurement values. In Proceedings of the 3rd International Conference on Signal and Image Processing (ICSIP 2018), Shenzhen, China, 13–15 July 2018; pp. 255–259. [Google Scholar]
- Zha, S.; Huang, J.; Qin, Y.; Zhang, Z. A Novel Non-Parametric Algorithm for Spectrum Map Construction. In Proceedings of the 2018 International Symposium on Electromagnetic Compatibility (EMC EUROPE 2018), Amsterdam, The Netherland, 27–30 August 2018; pp. 941–944. [Google Scholar]
- Chakraborty, A.; Rahman, M.S.; Gupta, H.; Das, S.R. SpecSense: Crowdsensing for efficient querying of spectrum occupancy. In Proceedings of the IEEE Conference on Computer Communications (IEEE INFOCOM 2017), Atlanta, GA, USA, 1–4 May 2017; pp. 1–9. [Google Scholar]
- Akimoto, M.; Wang, X.; Umehira, M.; Ji, Y. Crowdsourced Radio Environment Mapping by Exploiting Machine Learning. In Proceedings of the 22nd International Symposium on Wireless Personal Multimedia Communications (WPMC 2019), Lisbon, Portugal, 24–27 November 2019; pp. 1–6. [Google Scholar]
- Denkovski, D.; Atanasovski, V.; Gavrilovska, L.; Riihijärvi, J.; Mähönen, P. Reliability of a radio environment Map: Case of spatial interpolation techniques. In Proceedings of the 7th International ICST Conference on Cognitive Radio Oriented Wireless Networks and Communications (CROWNCOM 2012), Stockholm, Sweden, 18–20 June 2012; pp. 248–253. [Google Scholar]
- Melvasalo, M.; Koivunen, V.; Lundn, J. Spectrum maps for cognition and coexistence of communication and radar systems. In Proceedings of the 50th Asilomar Conference on Signals, Systems and Computers (ACSSC 2016), Pacific Grove, CA, USA, 6–9 November 2016; pp. 58–63. [Google Scholar]
- Janakaraj, P.; Wang, P.; Chen, Z. Towards Cloud-Based Crowd-Augmented Spectrum Mapping for Dynamic Spectrum Access. In Proceedings of the 25th International Conference on Computer Communication and Networks (ICCCN 2016), Waikoloa, HI, USA, 1–4 August 2016; pp. 1–7. [Google Scholar]
- Mao, D.; Shao, W.; Qian, Z.; Xue, H.; Lu, X.; Wu, H. Constructing accurate Radio Environment Maps with Kriging Interpolation in Cognitive Radio Networks. In Proceedings of the 2018 Cross Strait Quad-Regional Radio Science and Wireless Technology Conference (CSQRWC 2018), Xuzhou, China, 21–24 July 2018; pp. 1–3. [Google Scholar]
- Tang, M.; Ding, G.; Wu, Q.; Xue, Z.; Tsiftsis, T.A. A Joint Tensor Completion and Inference Scheme for Multi-Dimensional Spectrum Map Construction. IEEE Access 2016, 4, 8044–8052. [Google Scholar] [CrossRef]
- Huang, X.; Gao, Y.; Tang, X.; Wang, S. Spectrum Mapping in Large-Scale Cognitive Radio Networks with Historical Spectrum Decision Results Learning. IEEE Access 2018, 6, 21350–21358. [Google Scholar] [CrossRef]
- Yilmaz, H.B.; Tugcu, T. Location estimation-based radio environment map construction in fading channels. Wirel. Commun. Mob. Comput. 2015, 15, 561–570. [Google Scholar] [CrossRef]
- Sun, G.; Beek, J. Simple distributed interference source localization for radio environment mapping. In Proceedings of the 2010 IFIP Wireless Days (WD 2010), Venice, Italy, 20–22 October 2010; pp. 1–5. [Google Scholar]
- Sato, K.; Inage, K.; Fujii, T. Radio Environment Map Construction with Joint Space-Frequency Interpolation. In Proceedings of the 2020 International Conference on Artificial Intelligence in Information and Communication (ICAIIC 2020), Fukuoka, Japan, 19–21 February 2020; pp. 051–054. [Google Scholar]
- Isselmou, Y.O.; Wackernagel, H.; Tabbara, W.; Wiart, J. Geostatistical interpolation for mapping radio-electric exposure levels. In Proceedings of the First European Conference on Antennas and Propagation (EUCAP 2006), Nice, France, 6–10 December 2006; pp. 1–6. [Google Scholar]
- Du, X.; Zhu, Q.; Wu, Q.; Zhong, W.; Liu, D. UAV-Assisted Spectrum Mapping System Based on Tensor Completion Scheme. In Proceedings of the 5th Machine Learning and Intelligent Communications (MLICOM 2020), Shenzhen, China, 26–27 September 2020; pp. 16–26. [Google Scholar]
- Zhong, W.; Gu, Y.; Zhu, Q.; Li, P.; Chen, X. A novel spatial beam training strategy for mmWave UAV communications. Phys. Commun. 2020, 41, 101106. [Google Scholar] [CrossRef]
- Zhu, Q.; Dang, X.; Xu, D.; Chen, X. High Efficient Rejection Method for Generating Nakagami-m Sequences. Eletron. Lett. 2011, 47, 1100–1101. [Google Scholar] [CrossRef]
- Gajewski, P. Propagation models in radio environment map design. In Proceedings of the 2018 Baltic URSI Symposium (URSI 2018), Poznan, Poland, 14–17 May 2018; pp. 234–237. [Google Scholar]
- Zhang, Y.; Ghazal, A.; Wang, C.; Zhou, H.; Duan, W.; Aggoune, E.M. Accuracy-Complexity Tradeoff Analysis and Complexity Reduction Methods for Non-Stationary IMT-A MIMO Channel Models. IEEE Access 2019, 7, 178047–178062. [Google Scholar] [CrossRef]
- Yao, M.; Chen, X.; Wang, J.; Hua, B.; Yang, J. Ray Tracing Based Path Loss Modeling for UAV-to-Ground mmWave Channels in Campus Scenario. In Proceedings of the 5th Machine Learning and Intelligent Communications (MLICOM 2020), Shenzhen, China, 26–27 September 2020; pp. 459–471. [Google Scholar]
- Shepard, D. A two-dimensional interpolation function for irregularly-spaced data. In Proceedings of the 23rd ACM National conference (ACMNC 1968), New York, NY, USA, 27–29 August 1968; pp. 517–524. [Google Scholar]
- Azpurua, M.A.; Ramos, K.D. A comparison of spatial interpolation methods for estimation of average electromagnetic field magnitude. Prog. Electromagn. Res. 2010, 14, 135–145. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Xu, L.; Xu, D. Direction of Departure (DOD) and Direction of Arrival (DOA) Estimation in MIMO Radar with Reduced-Dimension MUSIC. IEEE Commun. Lett. 2010, 14, 1161–1163. [Google Scholar] [CrossRef]
- Debroy, S.; Bhattacharjee, S.; Chatterjee, M. Spectrum Map and Its Application in Resource Management in Cognitive Radio Networks. IEEE Trans. Cogn. Commun. 2015, 1, 406–419. [Google Scholar] [CrossRef]
- Bithas, P.S.; Nikolaidis, V.; Kanatas, A.G.; Karagiannidis, G.K. UAV-to-Ground Communications: Channel Modeling and UAV Selection. IEEE Trans. Commun. 2020, 68, 5135–5144. [Google Scholar] [CrossRef]
- Zhu, Q.; Li, H.; Fu, Y.; Wang, C.; Tan, Y.; Chen, X.; Wu, Q. A Novel 3D Non-Stationary Wireless MIMO Channel Simulator and Hardware Emulator. IEEE Trans. Commun. 2018, 66, 3865–3878. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Frequency | 100 MHz |
| Bandwidth | 5 MHz |
| Transmitting power | 0 dBm |
| Antenna type | Directional and omnidirectional |
| UAV height | 10 m to 55 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, X.; Zhu, Q.; Ding, G.; Li, J.; Wu, Q.; Lan, T.; Lin, Z.; Zhong, W.; Han, L. UAV-Assisted Three-Dimensional Spectrum Mapping Driven by Spectrum Data and Channel Model. Symmetry 2021, 13, 2308. https://0-doi-org.brum.beds.ac.uk/10.3390/sym13122308
Du X, Zhu Q, Ding G, Li J, Wu Q, Lan T, Lin Z, Zhong W, Han L. UAV-Assisted Three-Dimensional Spectrum Mapping Driven by Spectrum Data and Channel Model. Symmetry. 2021; 13(12):2308. https://0-doi-org.brum.beds.ac.uk/10.3390/sym13122308
Chicago/Turabian StyleDu, Xiaofu, Qiuming Zhu, Guoru Ding, Jie Li, Qihui Wu, Tianxu Lan, Zhipeng Lin, Weizhi Zhong, and Lu Han. 2021. "UAV-Assisted Three-Dimensional Spectrum Mapping Driven by Spectrum Data and Channel Model" Symmetry 13, no. 12: 2308. https://0-doi-org.brum.beds.ac.uk/10.3390/sym13122308